Control Strategy
advertisement

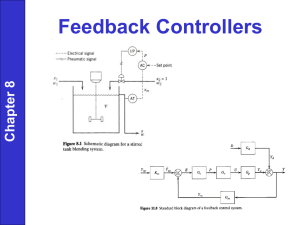
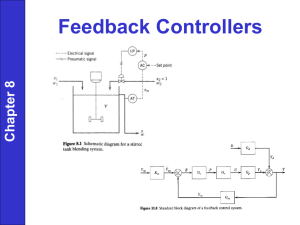
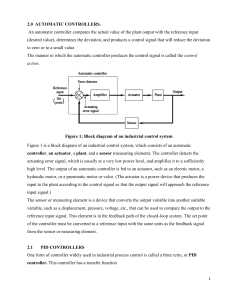
Control Strategy Single input and single output (SISO) with unit feedback This is a particular type of control extensively studied and used. The purpose is to design the controller in the following control process. A controller works on the error (the difference between the desired output and the current output), which varies with time as control is actuated. Controller Plant X(s) R(s) + - G(s) C(s) E(s) F(s) H(s) =1 Strategy One: proportional (to the present error) C ( s) k p It is shown already this strategy produces response (output) that oscillates many times around the desired input. As the output gets closer to the desired input, the control ‘force’ becomes smaller and hence ineffective. Strategy Two: proportional and derivative (the future) C ( s) k p kd s This should reduce overshoot and speed up the convergence of the output to the desired input. However, if the desired input drifts, this strategy will not work. Strategy Three: proportional, integral (the past) and derivative C (s) k p ki kd s s Such a controller is called PID controller and is widely used. An example of using the above strategy Suppose a radar is trying to track a satellite in the sky. Once the satellite moves to a new place, a sensor measures the distance between the radar’s current orientation and send the signal to a computer, which commands the controller to orient the radar towards the new position of the satellite. This force from the controller is proportional to the distance between the current orientation of the radar and the new position of the satellite in a dynamic manner. As the radar turns towards the satellite, the control force become smaller and smaller and due to friction the force will never be able to align the radar with the satellite. If derivative control is also used, the force is proportional to the rate of the error and hence will still be effective when the error itself is small. However, if the satellite keeps moving about, then the (proportional and derivative) controller will keep trying to follow a moving target and will never quite catch up. When integral control is added, the controller will make use of the time history of the target to track it and should do a better job. bm ( s z1 )( s z2 ) ( s zm ) Open-loop transfer function G ( s ) a ( s p )( s p ) ( s p ) n 1 2 n The characteristic equation of the closed-loop transfer function with negative unity feedback is T ( s) CG 1 CG bm ( s z1 )( s z2 ) ( s zm )(kp s ki kd s 2 ) an ( s p1 )( s p2 ) (s pn )s bm (s z1 )( s z2 ) ( s zm )( kp s ki kd s 2 ) The error is E ( s) R( s) X ( s) [1 T ( s)]R( s) R( s ) 1 CG an ( s p1 )( s p2 ) ( s pn ) sR(s) an ( s p1 )( s p2 ) (s pn )s bm (s z1 )( s z2 ) (s zm )(kp s ki kd s 2 ) [e(t )] lim [ sE ( s)] The steady-state error due to a unit-step input is lim t s 0 n (1) an pi n i 1 n (1) an pi k p bm (1) n i 1 0 P or PD m n z i i 1 I (PI or PID) Example: A close-loop system has C ( s) 0.5 s and G ( s) 1 . Determine s 1 the response under a unit-step input. Solution: T ( s ) 0.5 1 . R ( s ) . The output is s ( s 1) 0.5 s 0.5 1 1 s 1 2 s( s 1) 0.5 s s s s 0.5 1 s 1 1 s 0.5 0.5 s ( s 0.5) 2 0.25 s ( s 0.5) 2 0.25 ( s 0.5) 2 0.25 X ( s ) T ( s ) R( s ) The final output value x() lim [ sT ( s) R( S )] lim [ s 0 s 0 0.5 ] 1 s ( s 1) 0.5 The response (output) is x(t ) 1 exp( 0.5t )(cos 0.5t 0.5 sin 0.5) 1.2 1 0.8 0.6 0.4 0.2 0 0 5 10 15 20 25 Effects of Increasing Parameters Parameter Rise Time Overshoot Settling Time S.S. Error kp Decrease Increase Small Change Decrease ki Decrease Increase Increase Eliminate kd Small Change Decrease Decrease None The table summarises some of the features of some widely-used control strategies. Among them, PID control is arguably the most versatile one. Strategy C(s) f (t) P kp k p e(t ) simple, cheap e (t ) 0 PD k p kd s k p e kd e improve damping may generate noise PI kp k p e ki edt e (t ) 0 may cause instability k p e ki edt k d e requires no plant model for design, accurate, more stable may yield poor response most advantages of PI or PD more complicated PID Lag/Lead kp ki s ki kd s s k l (1 Ts) 1 Ts kle 1 (k l e f )dt T Advantages Disadvantages