Properties of Random Signals
advertisement

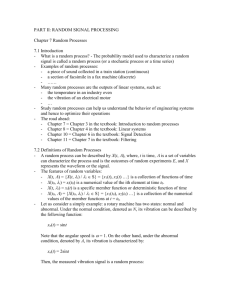
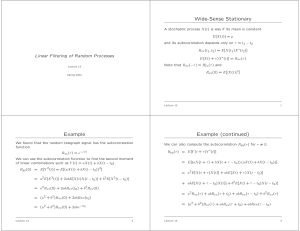
Response of Linear Systems to Random Signals Properties of Random Signals Introduction: Since random signals are defined in terms of probability, one way to characterize a random signal is to analyze the long-term observation of the process. The following analysis assumes the (weakly) stationary/ergodic property. The four basic properties of random signals: o Autocorrelation function – A measure of the degree of randomness of a signal. o Cross-correlation function – A measure of correlation between two signals. o Autospectral density function – A measure of the frequency distribution of a signal. o Cross-spectral density function – A measure of the frequency distribution of one signal (output) due to another signal (input). Correlation functions: o Autocorrelation function: The autocorrelation function Rxx(t) of a random signal X(t) is a measure of how well the future values of X(t) can be predicted based on past measurements. It contains no phase information of the signal. Rxx ( ) E[ X (t ) X (t )] x1 x2 P( x1 , x2 ) dx1dx2 0 0 where x1 X (t ), x2 X (t ), and P( x1 , x2 ) joint PDF of x1 and x2 o Cross-correlation function: The cross-correlation function Rxy(t) is a measure of how well the future values of one signal can be predicted based on past measurements of another signal. Rxy ( ) E[ X (t )Y (t )] o Properties of correlations functions: Rxx(-t) = Rxx(t) (even function) Rxy(-t) = Ryx(t) Rxx(0) = x2 + x2 = mean square value of x(t) Rxx() = x2 The cross-correlation inequality: Rxy (t ) Rxx (t ) R yy (t ) o Example: Rxx(t) of a sine wave process: 1 0 2 X (t ) A sin( 2 f t ) where P( ) 2 0 elsewhere Let x1 ( ) A sin[ 2 f t ] and x2 ( ) A sin[ 2 f (t ) ] A2 Rxx ( ) E[ x1 ( ) x2 ( )] 2 Rxx ( ) 2 A cos( 2 f ) 2 2 sin[ 2 f t ] sin[ 2 f (t ) ] d 0 2 R_xx( t ) 0 2 0 0.005 t Since the envelop of the autocorrelation function is constant as , we can conclude that any future values of a sine wave process can be accurately predicted based on past measurements. A time-delay system: n(t) x(t) z-1 y(t) Rxy ( ) E[ x(t ) y (t )] y (t ) x(t t 0 ) n(t ) Rxy ( ) E x(t ) x(t t 0 ) n(t ) E x(t ) x(t t 0 ) mean0 Rxy ( ) Rxx ( t 0 ) R yy ( ) E[ y (t ) y (t )] Rxx ( ) Rnn ( ) Spectral density functions: o Autospectral density function (autospectrum): The autospectral density function Sxx(f) of a random signal X(t) is a measure of its frequency distribution. It is the Fourier transform of the autocorrelation function. S xx ( f ) R xx (t ) 0 j 2 f t dt 2 R xx (t ) e j 2 f t dt Rxx (t ) e j 2 f t df 2 S xx ( f ) cos( 2 f t ) df S xx ( f ) e 0 o Cross-spectral density function (cross-spectrum): The cross-spectral density function Sxy(f) is a measure of the portion of the frequency distribution of one signal that is a result of another signal. It is the Fourier transform of the crosscorrelation function. S xy ( f ) R xy (t ) e 2 f t dt Rxy (t ) 2 S xy ( f ) cos(2 f t ) df 0 o Symmetry: Sxx(-f) = Sxx(f) (even function) Sxy(-f) = Sxy*(f) = Syx(f) o Example: White noise: The autocorrelation function of a white noise process is an impulse function. The implication here is that white noise is totally unpredictable since its autocorrelation function decays to zero at t > 0. Of course, this is what we expect to see in a white noise process, a random process with infinite energy. Low-pass white noise: Assuming the low-pass white noise has a magnitude of 1 and the bandwidth will vary. The autocorrelation function is computed using IFFT. S_nn f f 200 1 if R_nn ifft ( S_nn ) 0 otherwise 2 S_nnf 10 1 0 R_nnt 0 200 0 10 400 0 50 f S_nn f 1 if f 100 R_nn 0 otherwise 2 S_nn f 100 t ifft ( S_nn ) 5 R_nn 1 t 0 0 5 0 S_nn f 200 f 1 if 400 f 0 50 t 100 50 R_nn 0 otherwise ifft ( S_nn ) 2 2 S_nn f R_nn 1 t 0 2 0 0 200 f 400 0 50 t 100 The autocorrelation function of a low-pass white noise process is a sinc [sin(x)/x] function. The implication here is that the predictability of a low-pass white noise process is inversely proportional to the bandwidth of the noise. Since the noise energy is proportional to the bandwidth, this conclusion is consistent with common sense. Band-pass white noise: Assuming the band-pass white noise has a magnitude of 1 and the bandwidth will vary. The autocorrelation function is computed using IFFT. S_nn f 1 if ( f 100 ) ( f 200 ) R_nn 0 otherwise 2 S_nn f 5 R_nn 1 t 0 0 5 0 S_nn f 200 f 1 if ( f 400 100 ) ( f 0 R_nn 2 f 50 t 100 110 ) 0 otherwise S_nn ifft ( S_nn ) ifft ( S_nn ) 0.5 R_nn 1 t 0 0 0.5 0 S_nn f 200 f 1 if ( f 400 100 ) ( f 0 50 t 100 101 ) R_nn 0 otherwise ifft ( S_nn ) 2 S_nn f R_nn 1 t 0 0 0 200 f 400 0 50 t 100 The autocorrelation function of a band-pass white noise process has the similar property – the predictability is inversely proportional to the bandwidth of the noise. In addition, the autocorrelation function approaches the sine wave process as the bandwidth decreases, a conclusion that can easily be drawn using LTI system theory for deterministic systems. LTI Systems Introduction: LTI systems are analyzed using the correlation/spectral technique. The inputs are assumed to be stationary/ergodic random with mean = 0. Ideal system: H(f) x(t) y(t) h(t) t y(t ) x( ) h(t ) d 0 Y( f ) X ( f ) H( f ) Ideal model: o Correlation and spectral relationships: R yy (t ) h( ) h( ) Rxx (t ) d d Rxy (t ) h( ) Rxx (t ) d 00 0 S yy ( f ) H ( f ) S xx ( f ) S xy ( f ) H ( f ) S xx ( f ) 2 Total output noise energy: y2 S yy ( f ) df o Example: LPF to white noise 1 H( f ) H ( f ) e j ( f ) 1 j 2 f K K RC (LPF) t 1 1 h(t ) e K u (t ) H ( f ) , and ( f ) tan 1 (2 f K ) K 1 (2 f K ) 2 For white noise : S xx ( f ) A A 2 S yy ( f ) H ( f ) S xx ( f ) t and R yy (t ) 1 (2 f K ) 2 S yy ( f ) e j 2 f t 2y A K df e 2K A S yy ( f ) df 2 1 (2 f K ) 2 df 2y A 0 h 0 2 (t ) dt A 1 0K 2 2t A e K dt 2K A , or 2K One-sided spectrum: G(f) = 2 S(f) for f 0 o Example: LPF to a sine process 1 H( f ) H ( f ) e j ( f ) K RC 1 j 2 f K 1 Kt e h(t ) K 0 H( f ) (LPF) t0 t0 1 1 (2 f K ) 2 ( f ) tan 1 (2 f K ) 1 2 A ( f f0 ) 2 A2 ( f f 0 ) 2 G yy ( f ) H ( f ) G xx ( f ) 2[1 (2 f K ) 2 ] For sine wave : G xx ( f ) R yy (t ) G yy ( f ) cos (2 f t ) df and 0 R yy (t ) A2 cos (2 f 0t ) 2[1 (2 f 0 K ) 2 ] A2 ( f f 0 ) G yy ( f ) df df 2[1 (2 f K ) 2 ] 0 0 2 y y2 A2 2[1 (2 f 0 K ) 2 ] Models uncorrelated input and output noise: Gmn(f) = Gum(f) = Gvn(f) = 0 n(t) H(f) h(t) u(t) m(t) x(t ) u (t ) m(t ) v(t) y(t) x(t) y (t ) v(t ) n(t ) G xx ( f ) Guu ( f ) Gmm ( f ) G yy ( f ) Gvv ( f ) Gnn ( f ) G xy ( f ) Guv ( f ) H ( f ) Guu ( f ) Gvv ( f ) H ( f ) Guu ( f ) 2 H( f ) G xy ( f ) Guu ( f ) G xy ( f ) G xx ( f ) Gmm ( f ) H( f ) 2 Gvv ( f ) G yy ( f ) Gnn ( f ) Guu ( f ) G xx ( f ) Gmm ( f )