hence error
advertisement

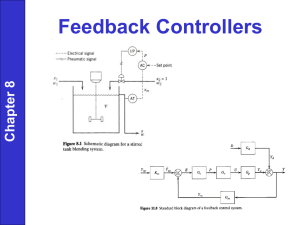
Lecture 6 Unit 8 CONTROLLERS The controller is an element which accepts the error in some form and decides the proper corrective action. The output of the controller is then applied to the system or process. The accuracy of the entire system depends on how sensitive is the controller to the error detected and how it is manipulating such an error. The controller has its own logic to handle the error. The controllers are classified based on the response and mode of operation. On the basis of mode of operation, they are classified into Continuous and Discontinuous controllers. The discontinuous mode controllers are further classified as ON-OFF controllers and multiposition controllers. Continuous mode controllers, depending on the input-output relationship, are classified into three basic types named as Proportional controller, Integral controller and Derivative controller. In many practical cases, these controllers are used in combinations. The examples of such composite controllers are Proportional – Integral (PI) controllers, Proportional – Derivative (PD) controllers and Proportional - Integral – Derivative (PID) controllers. The block diagram of a basic control system with controller is shown in Figure. The error detector compares the feedback signal b(t) with the reference input r(t) to generate an error. e(t) = r(t) – b(t). Proportional Controller: In the proportional control mode, the output of the controller is proportional to the error e(t). The relation between the error and the controller output is determined by a constant called proportional gain constant denoted as KP. i.e. p(t) = KP e(t). Dept. of EEE, NIT-Raichur Page 1 Unit 8 Lecture 6 Though there exists linear relation between controller output and the error, for zero error the controller output should not be zero as this will lead to zero input to the system or process. Hence, there exists some controller output Po for the zero error. Therefore mathematically the proportional control mode is expressed as P(t) = KP.e(t) + Po. The performance of proportional controller depends on the proper design of the gain K P. As the proportional gain KP increases, the system gain will increase and hence the steady state error will decrease. But due to high gain, peak overshoot and settling time increases and this may lead to instability of the system. So, compromise is made to keep steady state error and overshoot within acceptable limits. Hence, when the proportional controller is used, error reduces but can not make it zero. The proportional controller is suitable where manual reset of the operating point is possible and the load changes are small. Integral Controller: We have seen that proportional controller cannot adapt with the changing load conditions. To overcome this situation, integral mode or reset action controller is used. In this controller, the controller output P(t) is changed at a rate which is proportional to actuating error signal e(t). Mathematically the integral controller mode is expressed as. The constant K i is called integral constant. The output from the controller at any instant is the area under the actuating error curve up to that instant. If the error is zero, the controller output will not change. The integral controller is relatively slow controller. It changes its output at a rate which is dependent on the integrating time constant, until the error signal is cancelled. Compared to the proportional controller, the integral control requires time to build up an appreciable output. However it continues to act till the error signal disappears. Hence, with the integral controller the steady state error can be made to zero. The reciprocal of integral constant is known as integral time constant Ti. i.e., Ti = 1/Ki. Derivative Controller: In this mode, the output of the controller depends on the rate of change of error with respect to time. Hence it is also known as rate action mode or anticipatory action mode. The mathematical equation for derivative controller is . Where Kd is the derivative gain constant. The derivative gain constant indicates by how much percentage the controller output must change for every percentage per second rate of change of the error. The advantage of the derivative control action is that it responds to the rate of change of error and can produce the significant correction before the magnitude of the Dept. of EEE, NIT-Raichur Page 2 Unit 8 Lecture 6 actuating error becomes too large. Derivative control thus anticipates the actuating error, initiates an early corrective action and tends to increase stability of the system by improving the transient response. When the error is zero or constant, the derivative controller output is zero. Hence it is never used alone. PI Controller: This is a composite control mode obtained by combining the proportional mode and integral mode. The mathematical expression for PI controller is The advantage of this controller is that the one to one correspondence of proportional controller and the elimination of steady state error due to integral controller. Basically integral controller is a lowpass circuit. The PI Controller has following effects on the system. 1. It increases the order of the system 2. It increases the type of the system 3. It improves the steady state accuracy. 4. It increases the rise time so response become slow. 5. It filters out the high frequency noise 6. It makes the response more oscillatory. Dept. of EEE, NIT-Raichur Page 3