∫ Lecture 10
advertisement

16.322 Stochastic Estimation and Control, Fall 2004
Prof. Vander Velde
Lecture 10
Last time: Random Processes
With f ( x, t ) we can compute all of the usual statistics.
Mean value:
∞
x (t1 ) =
∫ xf ( x, t )dx
1
−∞
Mean squared value:
∞
x (t1 ) =
2
∫x
2
f ( x, t1 )dx
−∞
Higher order distribution and density functions. You can define these
distributions of any order.
F ( x1 , t1; x2 , t2 ;...) = P [ x (t1 ) ≤ x1 , x(t2 ) ≤ x2 ,..., x (tn ) ≤ xn ]
∂n
F ( x1 , t1; x2 , t2 ;... )
∂x1∂x2 ...∂xn
F is the probability that one member of the ensemble x satisfies each of these
constraints at times ti.
f ( x1 , t1; x2 , t2 ;...) =
But we rarely work with distributions higher than second order.
A very important statistic of a random process for the study of random processes
in linear systems is the autocorrelation function, Rxx– the correlation of x (t1 ) and
x ( t2 ) .
∞
Rxx (t1 , t2 ) =
∞
∫ dx ∫ dx x x f ( x , t ; x , t )
1
−∞
2 1 2
1
1
2
2
−∞
= E [ x (t1 ), x (t2 ) ]
This could be computed as a moment of the second order density function (as
above), but we usually just specify or measure the autocorrelation function
directly.
Notice that the autocorrelation function and the first order probability density
function express different kinds of information about the random process. Two
different processes might have the same pdfs but quite different Rxx (τ ) s.
Conversely, they might have the same Rxx (τ ) but completely different pdfs.
Page 1 of 9
16.322 Stochastic Estimation and Control, Fall 2004
Prof. Vander Velde
This is called the autocorrelation function for the random process {x (t )} . Note
some useful properties:
Rxx (t , t ) = E [ x (t ) x (t )] = E ⎡⎣ x (t ) 2 ⎤⎦ = x (t ) 2
Rxx (t2 , t1 ) = E [ x (t2 ) x (t1 ) ] = E [ x (t1 ) x (t2 ) ] = Rxx (t1 , t2 )
Also note that x(t2) is likely to be independent of x(t1) if |t2-t1| is large. For that
case:
lim Rxx (t1 , t2 ) → E [ x (t1 ) x (t2 ) ] = x (t1 ) x (t2 )
|t2 − t1|→∞
The members of the processes {x(t)} and {y(t)} must be associated as
corresponding pairs of functions. There is a particular y which goes with an x .
To study the statistical interrelation among more than one random process
we need to consider their joint distributions:
The general joint distribution function for two processes {x(t)} and {y(t)},
defined over the sample space of the same experiment in general:
Fxy( m ,n ) ( x1 , t1;..., xm , tm ; y1 , t1′;..., yn , tn′ ) = P [ x (t1 ) ≤ x1 ,..., x (tm ) ≤ xm , y (t1′) ≤ y1 ,..., y (tn ) ≤ yn ]
Examples include: Elevation, azimuth of radar tracker.
The general joint density function is:
f xy( m ,n ) ( x1 , t1;..., xm , tm ; y1 , t1′;..., yn , tn′ ) =
∂ m+n
Fxy( m ,n ) (...)
∂x1...∂xm∂y1...∂yn
Page 2 of 9
16.322 Stochastic Estimation and Control, Fall 2004
Prof. Vander Velde
Any of the lower ordered joint or single distributions can be derived from
this by integration over the variables to be eliminated.
The mathematical expectation of a function of these random variables is:
∞
E {g [ x (t1 ),..., x (tm ), y (t1′),..., y (tn′ )]} =
∫
−∞
∞
dx1... ∫ dyn g ( x1... yn ) f xy( m ,n ) (...)
−∞
By far the most important statistical parameter involved in the joint
consideration of more than one random process is the cross correlation
function.
Rxy (t1 , t2 ) = E [ x (t1 ) y (t2 ) ] =
∞
∞
∫ dx ∫ xyf
−∞
(1,1)
xy
( x, t1; y , t2 )dy
−∞
Rxy (t2 , t1 ) = E [ x (t2 ) y (t1 )] = E [ y (t1 ) x (t2 )] = R yx (t1 , t2 )
If x(t ), y (t ) are statistically independent
Rxy (t1 , t2 ) = E [ x (t1 ) y (t2 )] = E [ x (t1 )] E [ y (t2 )] = x (t1 ) y (t2 ) = 0
if either x(t ) or y (t ) or both is zero mean.
If w(t ) = x (t ) + y (t ) + z (t )
Then
Rww (t1 , t2 ) = E [ w(t1 ) w(t2 )]
= Rxx (t1 , t2 ) + Rxy (t1 , t2 ) + Rxz (t1 , t2 )
+ R yx (t1 , t2 ) + R yy (t1 , t2 ) + R yz (t1 , t2 )
+ Rzx (t1 , t2 ) + Rzy (t1 , t2 ) + Rzz (t1 , t2 )
such that if any two of x(t ) , y (t ) or z (t ) have zero mean and if they are all
mutually independent, all the cross correlation terms vanish.
Rww (t1 , t2 ) = Rxx (t1 , t2 ) + R yy (t1 , t2 ) + Rzz (t1 , t2 )
Thus for independent processes with zero mean, the autocorrelation of the
sum is the sum of the autocorrelations. This has special relevance since it
implies that for independent processes with zero mean, the mean square of
a sum is the sum of the mean squares. This simplifies the problem of
minimizing the mean squared error when more than one random process
is to be considered.
Page 3 of 9
16.322 Stochastic Estimation and Control, Fall 2004
Prof. Vander Velde
[ x(t1 ) ± y (t2 )]2 = x(t1 )2 ± 2 x(t1 ) y (t2 ) + y (t2 )2
= Rxx (t1 , t1 ) ± 2 Rxy (t1 , t2 ) + R yy (t2 , t2 ) ≥ 0
1
⎡ Rxx (t1 , t1 ) + R yy (t2 , t2 ) ⎤⎦
2⎣
1
Rxy (t1 , t2 ) ≤ ⎡⎣ Rxx (t1 , t1 ) + R yy (t2 , t2 ) ⎤⎦
2
1
≤ ⎡ x (t1 ) 2 + y (t2 ) 2 ⎤
⎦
2⎣
1
Rxx (t1 , t2 ) ≤ ⎡ x (t1 ) 2 + x (t2 ) 2 ⎤
⎦
2⎣
m Rxy (t1 , t2 ) ≤
Intuitively we feel that if the conditions under which an experiment is
performed are time independent, then the statistical quantities associated
with a random process resulting from the experiment should be
independent of time.
Analytically we say that a process is stationary if every translation in time
transforms members of the process into other members of the process in
such a way that probability is preserved.
This could also be stated by the statement that all distribution functions
associated with the process
F ( n ) ( x1 , t1 , x2 , t2 ,..., xn , tn ) = F ( n ) ( x1 , t1 , x2 , t1 + τ 2 ,..., xn , t1 + τ n )
be functions of the differences in the ti only and independent of the actual
values of the ti . Define n − 1 τ i . Then f ( n ) is independent of t1 .
f ( x, t ) ⇒ f ( x )
x (t ) ⇒ x
x (t ) 2 ⇒ x 2
Page 4 of 9
16.322 Stochastic Estimation and Control, Fall 2004
Prof. Vander Velde
Still depends on differences between time samples, but does not depend
on time at which sampling starts.
f ( x1 , t1; x2 , t2 ;..., xn , tn ) = f ( x, t; x2 ,τ 2 ; x3 ,τ 3 ;...; xn ,τ n )
t2 = t + τ 2
f ( x1 , t1; x2 , t2 ) ⇒ f ( x1 , x2 ,τ )
τ = t2 − t1
Rxx (t1 , t2 ) ⇒ Rxx (τ )
Rxx (τ ) = x (t ) x (t + τ )
= x (t − τ ) x (t )
= x (t ) x (t − τ )
= Rxx ( −τ )
A stationary random process is further said to have the ergodic property if
the time average of any function over a randomly selected member of the
ensemble is equal to the ensemble average of the function with probability
1.
This means there must be probability 1 of picking a function which
represents the ensemble. Note that a “representative” member of the
ensemble excludes any with special properties which belong to a set of
zero probability. A representative member must display at various points
in time the same distributions of amplitude and rates of change of
amplitude as are displayed in the entire ensemble at any one point in time.
Page 5 of 9
16.322 Stochastic Estimation and Control, Fall 2004
Prof. Vander Velde
This is why no member of the ensemble of constant functions is
representative of the ensemble.
Autocorrelation of a stationary function is an even function of its time
argument.
x 2 = Rxx (0)
1
⎡ Rxx (t1 , t1 ) + R yy (t2 , t2 ) ⎤⎦
2⎣
1
Rxy (τ ) ≤ ⎡⎣ Rxx (0) + R yy (0) ⎤⎦
2
1
≤ ⎡ x2 + y2 ⎤
⎦
2⎣
Rxy (t1 , t2 ) ≤
Rxx (τ ) ≤ x 2
≤ Rxx (0)
Rxy (τ ) = x (t ) y (t + τ )
= x (t − τ ) y (t )
= y (t ) x (t − τ )
= R yx ( −τ )
Page 6 of 9
16.322 Stochastic Estimation and Control, Fall 2004
Prof. Vander Velde
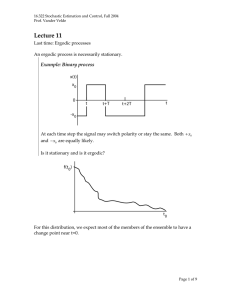
Ergodic property
A stationary random process is further said to have the ergodic property if the
time average of any function over a randomly selected member of the ensemble
is equal to the ensemble average of the function with probability 1.
This means there must be probability 1 of picking a function which represents
the ensemble. Note that a “representative” member of the ensemble excludes
any with special properties which belong to a set of zero probability. A
representative member must display at various points in time the same
distributions of amplitude and rates of change of amplitude as are displayed in
the entire ensemble at any one point in time. This is why no member of the
ensemble of constant functions is representative of the ensemble.
Example: Constants
Page 7 of 9
16.322 Stochastic Estimation and Control, Fall 2004
Prof. Vander Velde
Stationary, but not ergodic.
Time average = ensemble expectation, with probability 1.
Example: Sinusoids
x (t ) = A sin(ωt + θ )
A, ω fixed
θ random
Ensemble expectation of g ( x (t ) ) :
E [ g ( A sin(ωt + θ ))] =
2π
1
∫ g [ A sin(ωt + θ )] 2π dθ
0
Time average of g ( x (t ) ) :
Page 8 of 9
16.322 Stochastic Estimation and Control, Fall 2004
Prof. Vander Velde
T
1
Ave ⎡⎣ g ( A sin(ωt + θ ) )⎤⎦ = ∫ g [ A sin(ωt + θ ) ] dt
T 0
φ = ωt
1
Ave ⎡⎣ g ( A sin(ωt + θ ) )⎤⎦ =
T
ωT
dφ
∫ g [ A sin(φ + θ )] ω
0
ωT = 2π
Ave ⎡⎣ g ( A sin(ωt + θ ) )⎤⎦ =
1
2π
2π
∫ g [ A sin(φ + θ )] dφ
0
= ensemble expectation of g ( x (t ) )
So when f (θ ) is uniformly distributed, the process is stationary and ergodic.
Page 9 of 9