Answers for infrastructure.
ERCOT RARF Workshop
Siemens PTI Procedures
Alicia Dortch
Nelson J Bacalao
Siemens PTI Houston Office
August 2013
© 2012 Siemens Industry, Inc. All rights reserved.
Agenda
■
■
■
■
Introduction
Identification and tracking of missing data
Collection of values for missing data
Derivation of data “still missing”
Page 2
March 16
© 2012 Siemens Industry, Inc. All rights reserved.
Siemens Power Technologies International
Introduction
■ Siemens PTI was contracted by ERCOT to assist with the collection,
analysis, and production of data in completion of the Resource Asset
Registration Forms.
■ In this presentation we will go over the procedures proposed by
Siemens PTI to aid ERCOT in the completion of RARF missing data.
■ This is ongoing work and some of these procedures, in particular
those for estimation of parameters may be fine-tuned as we finish the
project.
Page 3
March 16
© 2012 Siemens Industry, Inc. All rights reserved.
Siemens Power Technologies International
Data Identification and Tracking
■ Siemens PTI developed a data tracking sheet to record, categorize
and organize the missing data needed for short circuit, dynamics, and
steady state simulation models.
■ This sheet was populated from a query of RARF data in the ERCOT
HUB. It assists with communicating all missing or suspect data to the
Resource Entities using a single document outside of the multiple
document RARF forms.
■ The next slide provides a view of this spreadsheet.
Page 4
March 16
© 2012 Siemens Industry, Inc. All rights reserved.
Siemens Power Technologies International
Data Identification and Tracking
Tracking Spreadsheet.
Page 5
March 16
© 2012 Siemens Industry, Inc. All rights reserved.
Siemens Power Technologies International
Data Identification and Tracking
Tracking Spreadsheet.
© 2012 Siemens Industry, Inc. All rights reserved.
Siemens Power Technologies International
Data Identification and Tracking
Explanation Tracking Sheet:
■ Columns A – E: Uniquely identify the unit of discussion
■ Columns F – I: Specifies which portion of the dynamics data is of concern (i.e.
exciter, generator, governor, stabilizer) since this is currently not included as
actual fields of the RARF 5.1 version
■ Columns J – M: Refer to the original RARF missing data file. This links the
tracking information back to the original RARF data file of discussion.
■ Columns N – P: Denotes communication between ERCOT and Siemens PTI to
help with Siemens review and discussion with Resource Entities (REs.)
■ Column Q: Simply denotes the original value of the data point. It will be null or
blank if referring to missing data and will have a number if referring to Suspect
data (identified in ERCOT audit checks as outside of an expected value).
■ Column R – T: Directly relate to column Q. Provides more detail comments on
any identified suspect data along with the commenter and comment date.
Page 7
March 16
© 2012 Siemens Industry, Inc. All rights reserved.
Siemens Power Technologies International
Collection of Values for Missing Data
The process to resolve the missing data:
1. Initial Resource Entity RE call:
•
ERCOT introduces the RE to the tracking sheet and Siemens PTI.
•
Tracking sheet reviewed and missing data points explained,
•
Provide suggestions for acquiring data in house & set plan for
resolving any remaining missing data items.
2. Follow-up with RE
3. Contact TSP
• The TSP is used as a data source calling on their experience from
case builds , interconnection studies or test reports/data sheets.
• The TSP is contacted in situations when the RE is unable to produce
the required RARF data.
Page 8
March 16
© 2012 Siemens Industry, Inc. All rights reserved.
Siemens Power Technologies International
Collection of Values for Missing Data
4. PTI Estimation
• Siemens PTI provides a procedure for selecting typical parameters
when the RE or the associated TSP cannot or have not yet provided
the information required for the RARF.
• Siemens PTI methodology proposed is expected to produce
reasonable parameters, but the actual equipment on site may be
unique and its parameters deviate, possibly significantly, from this
typical data.
• Therefore typical data should be highlighted as such and replaced by
actual data when it becomes available.
• In the balance of this presentation we will discuss Siemens PTI
methodology.
Page 9
March 16
© 2012 Siemens Industry, Inc. All rights reserved.
Siemens Power Technologies International
PTI Estimation
Procedures will be presented to cover the following areas that
were identified as the most frequently lacking:
■ Information to represent three winding transformers with buried
tertiary.
■ Typical parameters for Wind Turbine Generators (WTG.)
■ Methodology to estimate grounding impedance of generators.
■ Methodology to estimate saturated impedances when unsaturated
data is available as well as the machine’s saturation curve.
■ Methodology to find “peers” for units that can be used to estimate
the data for plants whose information is lacking.
Page 10
March 16
© 2012 Siemens Industry, Inc. All rights reserved.
Siemens Power Technologies International
PTI Estimation – 3 winding transformers
Overview
■ WTG plants sometimes use a three winding transformer with Y grounded
on the high (H) and medium (X) sides and have a delta connected
tertiary (Y).
■ The tertiary role is just to control harmonics and there are no external
connections to it. Its rating is generally known .
■ The positive impedance primary to secondary are also usually known
(X+H-X).
■ From tests it is possible to determine the zero sequence impedance
primary to tertiary (Z0H-Y), primary to secondary (X0H-X) and secondary to
tertiary (X0X-Y).
■ The corresponding positive impedances to the tertiary cannot be
determined from tests, as there is no access to the tertiary.
■ Tests need to be carried out for a number of units and this will take time.
Page 11
March 16
© 2012 Siemens Industry, Inc. All rights reserved.
Siemens Power Technologies International
PTI Estimation – 3 winding transformers
Overview (con’d)
■ Based on a large population of over 100 three winding transformers with
34.5 kV class secondary, 115 or 138 kV primary (345 kV limited) and a
tertiary, we developed a procedure by which the corresponding
impedances primary to tertiary and secondary to tertiary can be
estimated given the positive impedance primary to secondary (XH-X).
■ With this method,
Page 12
•
The two winding equivalents can be determined, when the tests above
are available.
•
The data for three winding models in PSS®E can be produced.
•
It can also be used to estimate missing parameters, while the tests
are yet to be carried out.
March 16
© 2012 Siemens Industry, Inc. All rights reserved.
Siemens Power Technologies International
PTI Estimation – 3 winding transformers
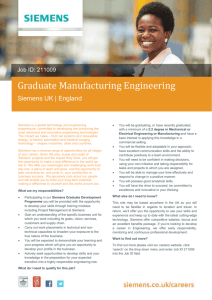
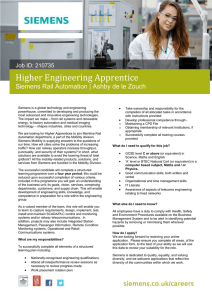
Estimation of Impedances
■ Various methods for estimation were investigated and the least
volatile was found to be making the estimation based on the following
ratios, where the equations correspond to the trend line
approximation (see next):
■ Thus given the impedance high to medium XH-X and the tertiary MVA
rating the impedance medium to tertiary XX-Y can be estimated from
Ratio 1.
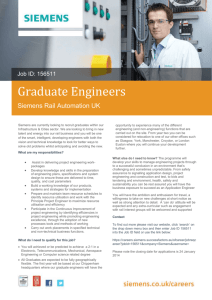
■ Once this value is known then the impedance high to tertiary XH-Y can
be estimated from Ratio 3:
Page 13
March 16
© 2012 Siemens Industry, Inc. All rights reserved.
Siemens Power Technologies International
PTI Estimation –
Ratio 1
300%
Series1
Log. (Series1)
Ratio 1: Medium to Tertiary as % of High to Medium
250%
y = 0.374ln(x) - 0.3529
R² = 0.6406
200%
150%
100%
50%
0%
0
20
40
60
80
100
120
140
160
180
Tertiary MVA Rating
Page 14
March 16
© 2012 Siemens Industry, Inc. All rights reserved.
Siemens Power Technologies International
PTI Estimation –
Ratio 3
300%
Series1
Power (Series1)
Ratio 3: X High to Tertiary as % of Medium to Tertiary
250%
y = 7.9425x-0.624
R² = 0.6306
200%
150%
100%
50%
0%
0
20
40
60
80
100
120
140
160
180
Tertiary MVA Rating
Page 15
March 16
© 2012 Siemens Industry, Inc. All rights reserved.
Siemens Power Technologies International
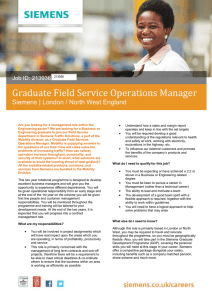
PTI Estimation –
Ratio 2 (Not Used)
300%
Series1
Log. (Series1)
Ratio 2: X High to Tertiary as % of High to Medium
250%
y = 0.1976ln(x) + 0.4771
R² = 0.2538
200%
150%
100%
50%
0%
0
20
40
60
80
100
120
140
160
Tertiary MVA Rating
Page 16
March 16
© 2012 Siemens Industry, Inc. All rights reserved.
Siemens Power Technologies International
PTI Estimation – 3 winding transformers
Estimation of Impedances
■ With this procedure all the positive sequence impedance between
windings can be obtained and based on them the equivalent
impedances of the “three winding transformer” model can be
determined using the following equations:
Page 17
March 16
© 2012 Siemens Industry, Inc. All rights reserved.
Siemens Power Technologies International
PTI Estimation – 3 winding transformers
Estimation of zero sequence impedances
■ In the cases that the tests have not yet been carried out and the
zero sequence impedances are unknown, we have two cases;
1. If the zero sequence primary to secondary is known, calculate the ratio
of this impedance to the corresponding positive impedance and use the
ratio to estimate the corresponding zero sequence impedances primary
to tertiary and secondary to tertiary.
–
Note that this is an approximation as the ratios are not
necessarily the same.
2. If no zero sequence is known, then while the tests are to be conducted
a conservative ratio of 80% of the positive impedance could be used.
–
Page 18
Note that as shown in the next figure, it is expected that this ratio
in the actual transformer will be greater, thus the zero sequence
is likely to be larger and the short circuits lower.
March 16
© 2012 Siemens Industry, Inc. All rights reserved.
Siemens Power Technologies International
Ratio Zero to Positive sequence vs population of
transformers
120.0%
100.0%
80.0%
X0 1-2 / X 1-2
60.0%
X0 1-3/ X 1-3
X0 2-3/ X 2-3
40.0%
20.0%
1
11
21
31
41
51
61
71
81
91
101
111
121
131
141
151
161
171
181
191
201
211
221
231
241
251
261
271
281
291
301
311
321
331
341
351
361
371
381
391
401
411
421
431
441
451
461
471
481
491
0.0%
Page 19
March 16
© 2012 Siemens Industry, Inc. All rights reserved.
Siemens Power Technologies International
PTI Estimation – 3 winding transformers
Examples
■ We show some examples below that illustrate the level of error to be
expected with this method
■ As can be observed the values are not accurate (it was never expected),
but are in the order of magnitude and allow the representation of the path
to ground in the zero sequence.
Case 1
H Base
T Base
Ratio 1
Ratio 3
48
41.3
109.5%
77.9%
Case 2
MVA
MVA
Estimated
Actual
X H-X
14.4%
14.4%
X X-Y
14.9%
X H-Y
11.6%
Page 20
March 16
H Base
T Base
Ratio 1
Ratio 3
56
33.6
96.2%
88.6%
Case 3
MVA
MVA
H Base
T Base
Ratio 1
Ratio 3
100
100
137.0%
44.8%
MVA
MVA
Estimated
Actual
X H-X
16.9%
16.9%
9.2%
X X-Y
23.1%
14.0%
17.8%
X H-Y
10.4%
18.0%
Estimated
Actual
X H-X
11.8%
11.8%
11.0%
X X-Y
11.4%
11.9%
X H-Y
10.1%
© 2012 Siemens Industry, Inc. All rights reserved.
Siemens Power Technologies International
PTI Estimation – Wind Turbine Generators
Overview
■ For wind turbine generators the typical parameters depend primarily on
the generator type (I to IV) and manufacturer.
■ Typical parameters are provided:
For Type 1 and 2 the impedance correspond to the impedance of the machine
seen from the stator at an estimated rated slip.
For Type 3 and 4 the values provided correspond to an approximate
equivalent impedance that reproduces the contribution to a remote short
circuit.
For short circuit we provide for Type 1 and Type 2 an impedance value (X’)
that can be used to estimate initial contribution to the short circuit.
We also provide the decay using the rotor time constant ( X’/[377*Rrotor] )
This same value X’ can be used as an approximation for the negative
sequence impedance.
Page 21
March 16
© 2012 Siemens Industry, Inc. All rights reserved.
Siemens Power Technologies International
PTI Estimation – Wind Turbine Generators
Overview
■ Typical parameters are provided (cont.):
For Type 3, if there is crow-bar operation, the control are by-passed and
the machine behaves like asynchronous generator. We provide similar
parameters to those for the Type 1 and Type 2.
For Type 4 machines and Type 3, if the controls operate, we provide
typical values for just after the short circuit and various cycles afterward.
Finally the zero sequence impedance of a Type 1, Type 2 and Type 3 with
crow-bar operation is approximately equal to the stator leakage.
Type 4 and Type 3 with controls in place oppose the zero sequence and
present fairly high impedance, we approximate it with a value of 50.
WTG are normally not grounded.
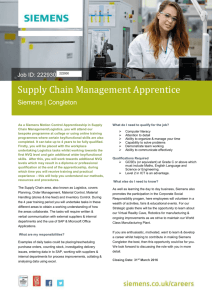
■ The following table provides the typical information for WTG that can
be used to estimate missing data.
Page 22
March 16
© 2012 Siemens Industry, Inc. All rights reserved.
Siemens Power Technologies International
WTG Typical Data
General Data
Positive Sequence (pu)
Negative Sequence (pu)
Zero Sequence (pu)*
MW
Voltage, kV
* Generators are ussually not grounded
Type 1
Case 1
3.93
0.177
0.1
1.67
0.6
Type 1
Case 2
2.106
0.158
0.0873
1.82
0.6
Type 1
Vestas V82
3.9452
0.154
0.08985
1.65
0.6
Type 1
M1000
3.927
0.177
0.1
1.00
0.6
Type 2
Case 1
3.776
0.303
0.126
1.67
0.6
Type 2
Zuzlon
2.486
0.109
0.0536
2.28
0.6
Type 2
Type 2
Vestas V80 Vestas V4760
5.035
3.734
0.302
0.236
0.12602
0.1115
1.80
1.80
0.6
0.6
Type 3
GE
0.8
4
50
1.50
0.6
Type 4
Siemens
0.65
4
50
2.30
0.6
Estimated short circuit current (does not include the GSU Transformer.) For Type 2 worst case decay, no external resitance. For Type 3 assumes crow bar operation
Initial Short Circuit Reactance
0.1773
0.1581
0.1543
0.1773
0.3030
0.1088
0.3022
0.2356
Maximum Initial current (pu)
5.64
6.32
6.48
5.64
3.30
9.19
3.31
4.24
Current @ 1 Cycle
3.78
4.23
4.68
4.25
2.83
7.60
2.84
3.47
Current @ 2 Cycles
2.53
2.83
3.38
3.20
2.43
6.28
2.44
2.84
Current @ 3 Cycles
1.69
1.90
2.44
2.41
2.08
5.20
2.09
2.32
Current @ 4 cycles
1.13
1.27
1.76
1.81
1.79
4.30
1.80
1.90
0.2
5.00
4.00
4.00
3.00
3.00
I max instantaneous (with control action)
I @ 2 to 3 cycles
I @ 4+ cycles
3.00
1.25
1.11
3.00
1.54
1.11
4.95
N/A
Modeling Data
X, synchronous reactance, pu on machine base
X', transient reactance, pu on machine base
X", subtransient reactance, pu
Xl, leakage reactance, pu
Inertia, H
XA, stator reactance, pu
XM, magnetizing reactance, pu
X1, rotor reactance, pu
Rotor resitance (no external)
RPROT_MAX, a sum of R_ROT_MACH
and total external resistance, pu
Page 23
March 16
3.930
0.177
N/A
0.100
5.300
0.008
2.106
0.158
N/A
0.087
4.870
0.087
3.926
0.072
0.010
0.010
3.945
0.154
N/A
0.090
4.804
0.008
3.927
0.177
N/A
0.100
5.296
0.008
3.776
0.303
N/A
0.126
3.460
0.126
6.840
0.180
0.007
2.486
0.109
N/A
0.054
0.054
2.600
0.056
0.003
5.035
0.302
N/A
0.126
4.106
0.126
6.840
0.181
0.007
3.734
0.236
N/A
0.112
4.356
0.112
4.230
0.128
0.008
0.110
0.100
0.110
0.105
© 2012 Siemens Industry, Inc. All rights reserved.
Siemens Power Technologies International
PTI Estimation – Wind Turbine Generators
Recommended procedure to estimate WTG missing data using Table
above:
1. First determine the turbine type for which data is missing, its manufactures
and size.
2. Check if there is a similar turbine in the system with a valid RARF that can
be used as a guide (Reference RARF.)
3. With the type, size and manufactures, enter in Table and find the closest
machine. If a similar turbine was found in the step above, then the
parameters should be close and can be incorporated in the RARF to be
sent to the RE for validation.
4. If there is disagreement between these sources, an assessment of the
applicability of Table to the particular turbines should be made and if valid
then Reference RARF should be reviewed to identify special conditions.
5. If no similar machine exist in the system, then use the closes machine’s
parameters in Table as a temporary value(s)
6. Finally the estimated parameter should be replaced from actual data as
soon as it becomes available.
Page 24
March 16
© 2012 Siemens Industry, Inc. All rights reserved.
Siemens Power Technologies International
PTI Estimation – Generator Grounding Resistance
Overview
■ Synchronous machines are not designed to withstand single line to
ground currents hence they are connected to the system with Delta-Y
GSU transformer with delta on the generator size and their neutral is
grounded through a very high resistance.
■ The value of the resistance should be represented on pu of a 100
MVA basis (system basis), however in some occasions the
information is in generator drawings with values in ohms connected to
the generator neutral via a transformer and it is not clear how to
produce the required value in pu.
■ We discuss two cases; a) drawings are available with the values in
ohms and b) no grounding information is available.
Page 25
March 16
© 2012 Siemens Industry, Inc. All rights reserved.
Siemens Power Technologies International
PTI Estimation – Generator Grounding Resistance
Drawings are available
■ The following information is available
Rg0 = Resistance in ohms connected to the LV side of the neutral transformer.
VH = Nominal high voltage of the neutral transformer.
VL = Nominal low voltage of the neutral transformer; where the resistance is
connected.
VM = Nominal generator voltage.
■ The resistance referred to the generator’s neutral Rg1 is given by:
■ …and to be used in the zero sequence model is multiplied by 3, so:
■ Using this last resistance we estimate the single line to ground short circuit
current as follows (ignore reactance's) :
Page 26
March 16
© 2012 Siemens Industry, Inc. All rights reserved.
Siemens Power Technologies International
PTI Estimation – Generator Grounding Resistance
Drawings are available: Example of Application
■ The table below shows the results of the application of the procedure above
to three generators:
■ Here we note that the neutral current is in the order of a few amperes.
Generator
Generator MVA Basis
Generator Voltage KV
MVA Basis
V high (kV)
V low (kV)
xxxx_UNITw
xxxx_UNITz
147
12
100
12.00
0.240
147
13.8
100
14.40
0.240
645
22.0
100
22.90
0.240
Rgo ohms (low side)
0.635
0.66
0.2689
Rg1 ohms (high side)
1588
2376
2448
Rg1 pu (system)
1102
1248
506
Rg1 pu (machine)
1621
1834
3263
Rzero = 3 * Rg pu (system)
3307
3743
1517
4862
0.00030236
0.00020569
1.45
5502
0.00026717
0.00018175
1.07
9788
0.00065900
0.00010217
1.7294
4.36
3.21
5.19
Rzero = 3 * Rg pu (machine)
I zero SLG pu (system)
I zero SLG pu (machine)
I zero SLG (Amps)
I neutral SLG (Amps)
Page 27
xxx_UNITy
March 16
© 2012 Siemens Industry, Inc. All rights reserved.
Siemens Power Technologies International
PTI Estimation – Generator Grounding Resistance
Drawings not available
■ If the drawings are not yet available, we can make the assumption
that the current has to be limited to a value in the order of a few
amperes,
■ Based on the example above, we propose using maximum neutral
current of 10 Amps
■ The following formula can be used to estimate the grounding
resistance in pu, where the MVA base defines whether it is on the
generator or system base.
Page 28
March 16
© 2012 Siemens Industry, Inc. All rights reserved.
Siemens Power Technologies International
PTI Estimation – Saturated Impedance
Overview
■ The RARF requires both saturated and unsaturated values. In general the
unsaturated values are available as these values are the ones employed in
stability evaluations as the saturation is modeled explicitly, but saturated
values may be missing. The saturation is non linear and its effect on the
impedances is heavily a function of the machine’s design and its operating
point.
■ Particularly during transients this effect becomes more complicated due
current displacements (i.e. unidirectional currents) in the machine.
■ When available the machine’s manufacturer provides the saturated values
obtained from detailed models of the machines and assumptions with respect
of its operating conditions.
■ To take advantage of as much information as possible and approximate the
procedure used by the machine’s manufacturer, we propose using the
classical equations of the synchronous machine to obtain an estimation of the
saturated values.
Page 29
March 16
© 2012 Siemens Industry, Inc. All rights reserved.
Siemens Power Technologies International
PTI Estimation – Saturated Impedance
Procedure
■ The following equations and equivalent circuits provide a relation between the
machine’s impedance Xd, Xd’ and Xd” and the magnetizing impedance Xad,
Eq 1
Eq 2
Eq 3
Page 30
March 16
© 2012 Siemens Industry, Inc. All rights reserved.
Siemens Power Technologies International
PTI Estimation – Saturated Impedance
Procedure
■ First Xad, Xfl and XDl are determined using the following equations:
■ Next the saturated values Xad must be obtained, which are derived from the
formula:
■ Where S is the saturation factor and normally S(1) and S(1.2) are known
Page 31
March 16
© 2012 Siemens Industry, Inc. All rights reserved.
Siemens Power Technologies International
PTI Estimation – Saturated Impedance
Procedure (cont)
■ For other values of S(V) we use the equation:
■ The coefficients A and B are determined using S(1) and S(1.2) and that the
machine at 0.9 pu should have little or no saturation.
■ For steady state S(1) is proposed.
■ For the transient period S(1) gives incorrect results, as the saturation
conditions are very different and tests with the model identified that a
value of S(2) gives reasonable approximations.
■ Finally with Xad-s and Eq 1 Xdv is found, Eq 2 gives Xd’v and Eq 3
gives Xd”v.
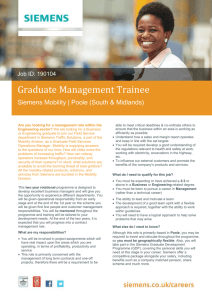
■ The next slide shows results for 4 generators.
Page 32
March 16
© 2012 Siemens Industry, Inc. All rights reserved.
Siemens Power Technologies International
PTI Estimation – Saturated Impedance
Tests
Data (unsaturated values)
D-Axis Synchronous Reactance
D-Axis Transient Reactance
D-Axis/Q-Axis Sub-Transient Reactance
Leakage Reactance
Open Circuit Saturation factor
Open Circuit Saturation factor
Base
Parameter
Xd
X'd
X"d = X"q
Xl
S(1.0)
S(1.2)
MVA
Saturation Parameters
B multiplier for exponent in B*Exp(A*V)
A multiplier for exponent in IM = B*Exp(A*V)
K(v) for Xd
K(v) for transient state (Xd' and Xd")
Model Parameters
Magnetizing D axis (unsat)
Magnetizing D axis (sat-steady state)
Magnetizing D axis (sat-transient)
Field Leakage Reactance
Damper winding leakage
Xad
Xad_s_1
Xad_s_2
Xfl
Xdl
Results
D-Axis Synchronous Reactance (Sat) - Estimated Xd (estimated)
D-Axis Synchronous Reactance (Sat) - Actual
Xd (actual)
D-Axis Transient Reactance (sat) - Estimated
Xd' (estimated)
D-Axis Transient Reactance (sat) - Actual
Xd' (actual)
D-Axis Sub-Transient Reactance (sat) - Estimated Xd"(estimated)
D-Axis Sub-Transient Reactance (sat) - Actual
Xd" (actual)
Page 33
March 16
BBSES Unit 1 BBSES Unit 2
2.052
2.064
0.381
0.381
0.302
0.304
0.236
0.236
0.136
0.136
0.529
0.529
696
700
CTA
2.173
0.248
0.159
0.125
0.152
0.571
143.4
ST
2.177
0.260
0.154
0.138
0.133
0.684
169
0.0582059
2.3775758
0.88028169
0.162858729
0.0578336
2.3775758
0.88028169
0.162858763
0.0478286
2.4643658
0.8680556
0.1477161
0.0373813
2.7243146
0.8826125
0.1128883
1.816
1.60
0.296
0.157582286
0.121139241
1.82769
1.61
0.298
0.157494874
0.12854931
2.0483
1.78
0.303
0.130858
0.0469888
2.039
1.80
0.230
0.1297642
0.0184151
1.835
1.804
0.339
0.335
0.292
0.261
1.845
1.815
0.339
0.337
0.293
0.262
1.903
1.956
0.216
0.222
0.156
0.146
1.938
1.956
0.221
0.222
0.153
0.154
© 2012 Siemens Industry, Inc. All rights reserved.
Siemens Power Technologies International
PTI Estimation – “Peer” Identification
Overview
■ For all remaining missing data, PTI is compiling a list of typical data
from similar non-wind unit types (i.e. CCP, coal fired, etc.) in the
ERCOT territory with known data and of similar type and output. If
there is nothing similar in the ERCOT system, we will then use a
listing of generators in the Eastern Interconnect as a data source for
typical values.
■ Machine parameters are largely based on manufacturer. In lieu of
knowing the manufacturer for all units in ERCOT, we are using the
machine type as a filter with the assumption that for each type of unit /
unit output combination there will be a small subset of manufacturers
therefore allowing for a “peer” identification based on similar
parameters.
Page 34
March 16
© 2012 Siemens Industry, Inc. All rights reserved.
Siemens Power Technologies International
PTI Estimation – “Peer” Identification
Procedure
1. Determine generator type of unit with missing data
2. Compile list of units of similar type with completed data.
3. In the case of CCPs, there is an additional level of categorizing
based on plant configuration (i.e. 2x1, 3x1). The further increases
the likelihood of accurate ‘peer’ detection.
4. Identify candidates with similar output
5. The detailed parameters of the candidates should then be
compared to the available parameters of the machine of question.
The most similar candidate is now identified as a ‘peer’.
6. Complete the missing RARF with values from the indentified ‘peer’
machine.
Page 35
March 16
© 2012 Siemens Industry, Inc. All rights reserved.
Siemens Power Technologies International
Questions
Contact Information:
Nelson Bacalao
Nelson.Bacalao@siemens.com
Alicia Dortch
Alicia.Dortch@siemens.com
© 2012 Siemens Industry, Inc. All rights reserved.
Siemens Power Technologies International