iT501 communication module manual
advertisement

Wilcoxon Research model iT501 operating guide
iT Communication Module
Meggitt Sensing Systems
20511 Seneca Meadows Parkway, Germantown MD 20876, USA
Meggitt (Maryland), Inc d/b/a Meggitt Sensing Systems
Tel: +1 (301) 330-8811
Tel: +1 800 WILCOXON
Fax: +1 (301) 330-8873
www.meggittsensingsystems.com
www.meggitt.com
Safety section
The iT501 can be safely operated when the instructions in this manual are carefully followed.
This section summarizes the safety considerations. Reminders, in the form described below,
will appear in the detailed instructions to assure operator awareness of these safety
considerations. Qualified personnel should operate and maintain this iT501 only after becoming
thoroughly familiar with this manual.
WARNING: This symbol is used in the instruction manual where operator safety must be
considered. The instruction manual should be consulted and read carefully.
CAUTION: This symbol is used when caution is needed to prevent damage to equipment. It
is used where careful attention to certain procedures described in the instruction manual is
needed. This symbol is also used to emphasize procedures other than normal operating
procedures.
Safety summary
1. Do not expose this equipment to rain or moisture.
2. Use common sense and avoid haste!
97018 RevA.2 06/12
Page 2
Contents
Safety section
Safety summary
1.0 Theory of operation
2.0 Product description
2.1 TBUS connectors
2.2 Front panel
2.3 Right side label
2.4 Left side label
3.0 Installation
3.1 Mounting and removal
3.2 Interconnection to iT100/200 Series
3.3 RS232 connection
4.0 Operation
4.1 Command set
4.2 Example sequence of operation
4.3 Inter-module communication
4.3.1 Renumber command
4.3.2 Name command
4.3.3 Request vibration data from all modules
5.0 Maintenance and troubleshooting
Table 5.1 - Communication indicator troubleshooting
6.0 Technical assistance
6.1 Technical assistance
6.2 Customer service
Appendix A - Block response definition
Appendix B - Predicting filter frequencies
97018 RevA.2 06/12
2
2
4
4
5
5
5
6
6
6
7
7
8
8
12
13
13
14
14
15
15
16
16
16
17
20
Page 3
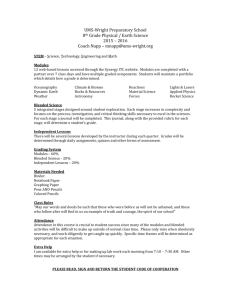
1.0 Theory of operation
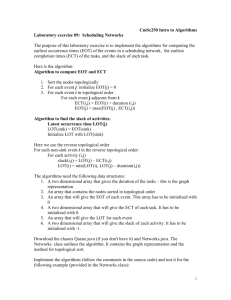
The iT501 functions as a general-purpose, serial, three-wire,
asynchronous, RS232, communication link between a computer
(PC) and the Wilcoxon iT100/200 Series vibration transmitter
modules. Multiple iT501 modules may be connected in a daisychain configuration and they will act in a bucket-brigade manner
to transfer data between the computer and each iT501 in the
chain.
Figure 1.0 - PC-to-iT501 daisy-chained
The iT501 gets data from the iT100/200 Series vibration transmitter module using the TBUS
connections at the rear of the modules.
The iT100/200 Series vibration transmitter continuously sends data out its TBUS. The iT501 will
receive that data and make it available to the computer when interrogated by the computer
using the iT501 command instruction set.
Note: The iT501 is designed as an accessory to an iT100/200 Series Vibration Transmitter module. It will
not communicate with an iT401 Alarm module since the iT401 has no capability to output the serial data
required for the operation of the iT501.
2.0 Product description
The iT501 has been designed to allow it to be disconnected from the TBUS while
powered.
Mounting rail bus connectors iT031 and iT032 are positioned in the DIN rail and snapped
together to connect the communication and power signals in parallel with one another.
The Wilcoxon iT Series of modules have widths of 17.5 and 22.5 mm and can be
combined with these bus connectors. The iT031 is used with the iT501 Communication
module and the iT100/200 Series vibration transmitter module. The housing is mounted
on the rail by swinging it in the familiar manner and is mechanically guided by the DIN
rail connector.
This concept allows modules to be interconnected without using terminal block wires
thereby simplifying the installation and wiring process.
Figure 2.0 - PC and
iT terminals
The iT501 has two electrically parallel connectors for each interface connection illustrated in
Figure 2.0. One set for connection to the PC (or upstream iT501) and another set for connection
to the “downstream” iT501. One of each connector is located on the upper and lower edge
terminal blocks of the iT501 as a convenience.
97018 RevA.2 06/12
Page 4
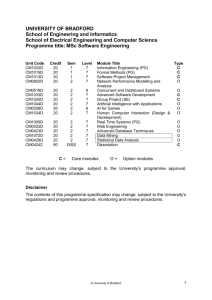
2.1 TBUS connectors
The TBUS connectors used with the iT Series of
modules are shown here in figure 2.1.
The iT031 connectors are used with the vibration
transmitter module and the iT501 communication
module. Each of these modules occupies 17.5
mm width along the DIN rail.
The iT032 is used with the iT401 alarm module
as it occupies 22.5 mm of the DIN rail.
IT031
IT032
IT034
iT401
TBUS connector at module rear
IT032 IT031 IT031
Figure 2.1 - TBUS connectors and board connections
The board-edge connection plugs directly into the
TBUS connector. The TBUS connector accepts
the edge of the recessed circuit board. Figure 2.1 shows the recessed board connection at the
rear of each module.
The iT034 connector plugs into the interface connection of the TBUS module. It is used as a
wired-interface connection to provide power or communication for multiple-module installations.
The iT034 is also used when it is necessary to interconnect TBUS connectors that are not
adjacent to one another. This could be used to extend the TBUS to modules located on a
different DIN rain or elsewhere along the same DIN rail.
2.2 Front panel
The front panel of the iT501 has no controls or adjustments. There are three LED indicators on
the front panel. They are labeled “TBUS”, “PC”, and “iT” and will flash when the indicated
communication port is in use.
More assistance in interpreting the measing of the LEDs being “On’, “Off”, or “Flashing” can be
found in section 5.0 of this manual in Table 5.1.
2.3 Right side label
The right side label illustrates how multiple iT501 modules are wired for
daisy-chaining. The TX of the “Upstream” iT-module’s “IT” port must
connect to the RX of the next “Downstream” iT-module’s “PC” port, and
the RX of the “Upstream” iT-module’s “IT” port must connect to the TX
of the next “Downstream” iT-module’s “PC” port. The “COM” terminals
connect together.
Note: If the modules are not connected TX-to-RX, no communication will occur.
97018 RevA.2 06/12
iT100 iT501
TBUS board-edge pins
Page 5
2.4 Left side label
This label illustrates the DTE (computer) wiring connection for the iT501.
The serial data connection is asynchronous to the computer.
The TX terminal of the iT501 must be connected to the RX terminal of the
computer serial port and the RX terminal of the iT501 must be connected
to the TX terminal of the computer serial port.
Note: If the iT501 and the computer are not connected TX-to-RX, no
communication will occur.
The label also indicates the TBUS connectivity to the iT100/200 Series vibration transmitter
module.
3.0 Installation
The iT501 is designed to communicate with the iT100/200 Series vibration transmitter module
using the integrated TBUS connections at the rear of both modules. There is no other provision
for the inter-module communication. The data link is via the TBUS only.
Note: The maximum number of iT501 modules that can be daisy-chained is eight (8).
The iT501 can receive data from one and only one iT100/200 Series vibration transmitter
module on the TBUS. While more than one iT100/200 Series vibration transmitter module can
be connected to a TBUS module interconnection, only one iT100/200 Series vibration
transmitter module can be designated as outputting data to the TBUS. All other iT100/200
Series vibration transmitter modules on that TBUS interconnection must be set to receive data
from the TBUS interconnection.
Caution: If two or more, iT100/200 Series vibration transmitter modules on the same TBUS
segment are set to attempt to transmit data via the TBUS, no useful data will be transmitted.
Damage to the iT100/200 Series vibration transmitter module may result.
3.1 Mounting and removal
The iT Series of modules mount to a standard 35 mm DIN rail. The rear of the
module has a clip that is spring-loaded. This clip holds the module securely in
place. The clip releases by using a flat-bladed screwdriver inserted into the
bottom slit of the clip to pull and release the clip attachment to the lower DIN
rail.
The module can be installed by placing the upper "hook" of the mount onto the
DIN rail and gently "rocking" it into place until the latch "catches" on the lower
rail.
Figure 3.1 - Mounting and removal
97018 RevA.2 06/12
Page 6
Removal requires a small, flat-bladed screwdriver. The blade must be less than ¼ inch (6mm) in
width to fit into the slot on the latch. Insert the blade into the slot and gently "pry" the latch down
until it releases from the DIN rail, then lift the module releasing it from the DIN rail.
Note:The user should disconnect the plugs from the module before removing the module from
the DIN rail. All plug wiring should be well marked to assure proper connections when the
module is re-installed.
Each iT501 module is 17.5 mm wide and therefore uses 17.5 mm of DIN
rail length.
IT501
IT031
3.2 Interconnection to iT100/200 Series
The iT100/200 Series vibration transmitter module and the iT501 interface
through the rear TBUS connections. Figure 3.2 illustrates how the
modules will connect using the TBUS connectors in the DIN rail. Two (2)
model IT031 TBUS connectors must be used.
IT100/200-series
IT031
Figure 3.2 - iT modules and IT031
TBUS connectors
Caution: J11, J12, and J14 of the iT100/200 Series vibration transmitter module MUST be
set to the “SENSOR” position for the module to output data to the TBUS for use by the iT501.
Any additional iT100/200 Series vibration transmitter modules connected to an iT100/200
Series vibration transmitter module MUST have its jumper sttings of J11, J12, and J14 set to
“TBUS” to avoid contention for the data transmission lines of the TBUS.
The iT501 can be located on either side of the iT100/200 Series vibration transmitter module.
Figure 3.3, below, illustrates the iT501 mounted on the right side of the iT100/200 Series
vibration transmitter module. It could, however, be mounted on the left
side.
3.3 RS232 connection
As outlined in section 1.0, the RS232 wiring must connect the TX
connection of one device to the RX connection of the other device.
Figure 3.3 illustrates the physical wiring of the terminals. Actual wiring
should use shielded, twisted-pair wires such as Wilcoxon J9F or J10.
Figure 3.3.1 - Daisy-chaining of iT501s
The wiring could be implemented using either the upper sets of
terminals or the lower sets. However, only one of the “PC” set of
terminals can be used and only one of the iT sets used when wiring the
connections.
Note: The maximum number of iT501 modules that can be daisy-chained is
eight (8).
Figure 3.3.2- Cables and interconnection
97018 RevA.2 06/12
Page 7
4.0 Operation
The iT501 24 Volts DC power requirements are supplied through the TBUS from the iT100/200
Series vibration transmitter module. The iT501 will power up when the iT100/200 Series
vibration transmitter module powers up.
Wilcoxon has available a free software interface, VibeLink, for the iT501 module. The VibeLink
software requires Window XP™ software and an RS232 port on the computer to operate. The
VibeLink software will communication with the iT501 modules and provide basic display
functions of vibration data and trending of the data.
All iT501 communication can also be performed with a hyperterminal window on any computer
equipped with the RS232 serial port interface.
4.1 Command set
Command sent Data format sent
PC command to 1st
iT501 (9600 Baud, 8-data out from iT501 to "upstream" from
iT501 modules
bits, 1-stop bit, no parity) "downstream"
iT501
Function
iT501 acknowledgement
upstream toward "PC"
Response of all "upstream"
modules to data received
from a "downstream" module
Renumbers all COM-module
positions. Sending "R", 01h,
EOT tells module connected
to PC that it is "module one,"
#1 adds 1 to position sent to
next module. Last module
responds with its position by
"r", hex-position, EOT.
See CAUTION note below
All upstream modules pass
last reply to PC
Requests user-stored "name"
of module at position ##h,
responds with "n", hex unitposition, then 16-ASCII
characters stored inside unit,
and EOT.
All upstream modules pass
last reply to PC
R, ##h, EOT
(52 01 04)
iT501 responds with ACK
N, ##h, EOT
(4E uu 04)
iT501 responds with ACK
97018 RevA.2 06/12
Acknowledgement
from downstream
iT501
R, ##h+1, EOT
r , ##h, EOT
(next iT501
responds with ACK)
N, ##h-1, EOT
n, ##h,
"xxxxxxxxxxxxxxxx",
EOT
(next iT501
responds with ACK)
Page 8
U, ##h, EOT
(55 uu 04)
U, ##h-1, EOT
iT501 responds with ACK
(next iT501 responds with
ACK)
W, ##h-1,
"xxxxxxxxxxxxxxxx",EOT
W, ##h, "xxxxxxxxxxxxxxxx",EOT
(57 xxx… 04)
iT501 responds with ACK
S, ##h, EOT
(53 uu 04)
iT501 responds with ACK
V, ##h, EOT
(56 uu 04)
iT501 responds with ACK
97018 RevA.2 06/12
(next iT501 responds with
ACK)
S, ##h-1, EOT
(next iT501 responds with
ACK)
V, ##h-1, EOT
(next iT501 responds with
ACK)
u, ##h,
Requests permanent unit
######h, serial# of COM-module at
EOT
position ##h. Replies with
"u", then unit position then
3-byte hex-value, then
EOT. Capable of s/n
000000h through
FFFFFFh
(16,777,215dec).
All upstream modules
pass last reply to PC
w, ##h,
Writes user "name" of
EOT
module at position ##h
with 16 ASCII- characters.
Requested unit replies with
"w", its hex module#, EOT.
All upstream modules
pass last reply to PC
s, ##h,
Requests iT100/200
##h, EOT Series Transmitter "Signal"
information from COMmodule at position ##h.
Module-response is "s",
hex position, then hex
value representing %-offull-scale, then EOT.
All upstream modules pass
last reply to PC
v, ##h,
Requests iT100/200
##h, EOT Series Transmitter "BOV"
information from COMmodule at position ##h.
Module-response is "v",
hex position, then hex
value representing 10X
sensor Volts DC, then
EOT. For example, a reply
of 78h represents 12.0Vdc.
All upstream modules pass
last reply to PC
Page 9
B, ##h, EOT
(42 uu 04)
iT501 responds with ACK
T, ##h, EOT
(54 uu 04)
iT501 responds with ACK
97018 RevA.2 06/12
B, ##h-1, EOT
b, ##h, (54 hex- Requests iT100/200 Series
bytes),EOT
Transmitter block of 54-bytes of
data. Gives setup, calibration,
and miscellaneous information
allowing software to calculate
iT100/200 Series Transmitter
operating frequencies. COMmodule will respond with its
position#, block data, and EOT.
All previous modules will have to
repeat data back to PC, so use
of this option should be limited
where many IT501 modules are
installed.
(next iT501
All upstream modules pass last
responds with ACK)
reply to PC
T, ##h-1, EOT
t, ##h, ####h,
Requests temperature inside
EOT
COM module (not iT100/200
Series Transmitter module).
Reply will be "t", hex position#,
and two right-justified bytes,
followed by EOT. Temperatureresponse is 10-bit, and changes
by 2.048bits/°C. Actual
temperature calculated by one of
the two following formulas:
Temperature: (°C)=(####h 102.4) / 2.048 or (°F)=[(####h 102.4) / 1.13778] +32
Temperatures measured will
normally be ± 15°C of (outside
case) air temperature.
(next iT501
All upstream modules pass last
responds with ACK)
reply to PC
Page 10
G, EOT
(47 04)
iT501 responds with ACK
A, EOT
(41 04)
iT501 responds with ACK
P, EOT
(50 04)
97018 RevA.2 06/12
G, EOT
g, ##h,
System-wide "Signal" request,
##h…##h, EOT get signal information from every
unit and passes value to next
upstream module in one block of
data. Last iT501 module in chain
passes its module-# and signalinformation to next upstream
module. Next upstream module
passes highest module number
and appends its signal
information to the previous signal
information, followed by EOT.
First replied data after "g" is max
unit#, followed by max-unit's
signal. Last data replied before
EOT is Unit #1's signal level.
(next iT501
All upstream modules append &
responds with ACK)
pass reply to PC
A, EOT
a, ##h,
System-wide "BOV" request, get
##h…##h, EOT BOV information from every unit
and passes value to next
upstream module in one block of
data. Last iT501 module in chain
passes its module-# and BOVinformation to next upstream
module. Next upstream module
passes highest module number
and appends its BOV information
to the previous BOV information,
followed by EOT. First replied
data after "a" is max unit#,
followed by max-unit's BOV.Last
data replied before EOT is Unit
#1's BOV level.
(next iT501
All upstream modules append &
responds with ACK)
pass reply to PC
P, EOT
p, ##h,
System-wide "Temperature"
####h…####h, request, get temperature
EOT
information from every unit and
passes value to next upstream
module in one block of data.
Last iT501 in daisy-chain passes
its module-# and temperature
information to next upstream
module. Next upstream module
passes highest module number
and appends its temp information
to the previous temp information,
followed by EOT. First replied
data after "p" is max unit#,
Page 11
followed by max-unit's temp.
Last data replied before EOT is
Unit #1's temperature level. (See
"T" function to calculate actual
temperature in °C or °F)
iT501 responds with ACK
(next iT501
responds with ACK)
All upstream modules append &
pass reply to PC
Note: "x" denotes ASCII character, "A" through "Z" (UPPER CASE), "a" through "z" (lower case), or “0”
through “9”. ##h denotes one hex-byte, 00h through FFh, ACK= 06h. EOT= 04h. ##h…##h denotes a
non-bounded list of hex-bytes. ####h…####h denotes a non-bounded list of hex-words. "Upstream"
means toward PC, "Downstream" means toward last iT501 module.
CAUTION: The Renumber (R) command should be used sparingly as it writes information to
the iT501 EEPROM. The EEPROM is recommended for a maximum of 500,000 write cycles.
4.2 Example sequence of operation
Step 1 Have PC interrogate the first iT501 module to renumber the modules connected through
that module. The PC should issue the command "R" 01h EOT (3 bytes, the first is the ASCII for
capital R, the second the hexadecimal “1”, the third the EOT hex byte)
Note: The actual command format, in hexadecimal, is 52 01 04. It is a simple 3-byte string.
Sequence of response to command and meaning (assuming 4 modules were connected):
“r”
Echo “R” with lower
case response
04h
Module number
of last iT501
04h
End of Transmission
(EOT)
Three hex bytes will be returned.
The first byte will be a lower case (“r”), the echo of the upper case (“R”) command. The second
byte will be the number of the last module in the chain (“04h”) which will be the number of
modules (N) as the “first” module is number “one”. The last byte will be the End-of-Transmission
character (“04h”).
Step 2 Have the PC issue “names” to each module.
(The following example assumes the name “BFP1OBV” will be assigned to the fourth module)
Have PC “name” the fourth iT501 module “BFP1OBV”.
The PC should issue the command "W", 04h, “BFP1OBV”, 04h (EOT). (10 bytes, where
“BFP1OBV” are the 7 ASCII alphanumeric characters in hex code)
The module will respond with “w”, 04h, 04h (EOT) (3 bytes)
97018 RevA.2 06/12
Page 12
The “w” is a lower case command echo, 04h is the module number, 04h is the EOT.
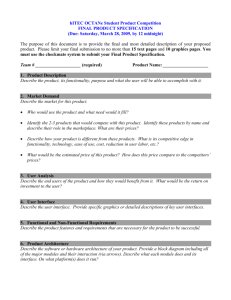
Step 3 Request the vibration signal data from all modules. This is a two-byte command, “G”,
EOT.
(The response sequence will be 10 bytes and illustrates the 4-module example)
“g”
04h
##h
03h
##h
02h
##h
01h
##h
04h
Command
echo
Module
Module
04h
signal
level
Module
Module
03h
signal
level
Module
Module
02h
signal
level
Module
Module
01h signal
level
End of
transmission
#4
#3
#2
#1
The ##h hexadecimal signal level numbers are from 00h to 7Fh and represent the signal level
as an integer value of percentage of the full-scale (0% to 127%) with a resolution of one percent
(1%).
Note: The iT100/200 Series vibration transmitters have an inherent overrange capacity that is not sent
out the 4-20 mA output. The iT100/200 4-20 mA loop current output can be at the maximum of 20 mA, but
the module will still be accurately computing the signal level and reporting it to the iT501 communication
module. This accounts for the overrange capability of 127%.
4.3 Intermodule communication
While the communication between modules is transparent to the
controlling PC, it is useful to understand its operation.
4.3.1 Renumber command
Each module “learns” its place in a sequence through the PC issuing
the “Renumber” (“R”) command. As each module receives the “R”
command through its “PC” port it stores the hexadecimal number sent
Figure 4.3 - Cabling model numbers
with the “R” command, adds “01h” to the number, then sends it out its
“IT” port. When a module is reached that cannot communicate with an additional module via its
“IT” port, it then echoes back through the “PC” port its module number as received with the
chained “R” command. Each module receiving the “r” data from its “IT” port passes it back
“upstream” through its “PC” port. The renumber command is “R, 01h, EOT”, a 3-byte command.
Note: The Renumber command MUST be the first command issued to newly-installed iT501 modules.
4.3.2 Specific address command
When the PC issues a “specific address” command it has
the hexadecimal module number in the address of the
command. This type of command is addressed to a
Figure 4.3.2 - Illustration of message address ‘decoding’
97018 RevA.2 06/12
Page 13
specific module. The example above in 4.2.2 has the PC talking to module 04h. A module
“knows” a specific address message is for it when the received address byte at its PC port has
the address byte set to 01h.
The first module, in the example above, received an address byte of 04h with the command.
Since it was not a “01h” byte, the command is not being addressed to the first module.
Therefore, the module reduces the address by 01h (in this case to 03h) and passes it out its “IT”
port. Each module in sequence performs this same operation on the message. By the point
where the 04h module receives the message, the address byte has been reduced to “01h”.
Module 04h accepts this message as addressed to it.
This is the method of message addressing for all commands issued to a specific module
number in the sequence.
Note: The Renumber command must be issued to modules before this addressing will be valid.
4.3.3 Commands to all modules
Requesting vibration data (“G, EOT”) is a type of “Command to all modules” command to be
answered by all modules in a daisy-chained group of modules. The message is passed along
the chain until it reaches the last module. The last module already knows it is the last module
because it is has no valid connection beyond itself.
When the command reaches the last module it will respond to the command by transmitting the
command “echo” lower-case character (“g” in this case), its module hexadecimal number (03h in
this case), the data requested (a hex number ##h), and terminates in an 04h (the end-oftransmission character). The total number of bytes sent “upstream” from the last module is four
(4) bytes. As the message it sent “upstream” each module inserts its ##h data value after the
previous modules data value lengthening the message by one byte. Section 4.2.3 above shows
the final result received at the PC serial port for a four-module daisy-chain.
97018 RevA.2 06/12
Page 14
5.0 Maintenance and troubleshooting
Table 5.1 - Communication indicator troubleshooting
LED
Indication
Potential
problem
Action required
TBUS
Off
No power
Check for power to iT100/200 Series module. If iT100/200
Series module is powered, check that TBUS connectors are
connected, fully-inserted into DIN-rail unit front-housings
are fully snapped into module's lower housings.
If problem still exists, return iT501 to Wilcoxon.
Check for iT100/200 Series module green "Ready"
indicator, wait for green "Ready" indicator time-out. If green
“Ready” indicator does not light or flash on the iT100/200
Series module the problem is with the iT100/200 Series
module.
Check for something shorting-out TBUS-connector's
center-pins or modules not fully inserted into TBUS
connectors. For power to supply the iT501 TBUS LED, the
TBUS connector is installed and operational, so
communications is interrupted between iT100/200 Series
module and iT501. If other modules exist on the TBUS,
check for their proper operation. If other modules appear to
be functioning properly, return iT501 to Wilcoxon.
If other modules appear to also be non-operational, remove
modules one-by-one (excluding iT100/200 Series module)
to determine if another module is interfering with iT501's
operation.
Return iT100/200 Series module and iT501 to Wilcoxon if
you are unable to locate cause of communication error.
Check whether iT100/200 Series module is set for TBUS
"input" mode in error. One (and only one) iT100/200 Series
module must be set for TBUS-output mode (current jumper
that controls this is J12/P12 on iT100/200 Series module).
If the iT-transmitter is set for TBUS-input on J12/P12, it
never sends-out communications to the TBUS.
TBUS
On
97018 RevA.2 06/12
Power OK, but
no TBUS
Communication
with iTTransmitter
Page 15
5.0 Maintenance and troubleshooting
Table 5.1 - Communication indicator troubleshooting
TBUS
Flashing
Normal
This is the indication of proper operation.
PC
Off
No active communication
device is connected to
either "PC"
transmit/receive
connector-plugs.
Check wiring.
Check that the communication device is powered.
The communication device could the next
“upstream” iT501 in a daisy-chain connection.
More than one
connection to either “PC”
or “IT” terminals
Ensure there is only one connection to either of
the two “PC” terminals.
PC
On
A communication device is
connected to either "PC"
plug, but no communication
is underway.
There is not constant communication between "PC" and
iT501 under normal operation, so a continuous “On”
indicator is not necessarily an error condition.
PC
Flashing
Normal
Communication is occurring on the “PC” connections.
This is indicative of proper operation.
IT
Off
No iT501 is connected to
either "IT” plug.
Check wiring.
Check that the next iT501 in the chain is powered.
More than one “IT”
connection is in use
The last iT501 in a daisy-chain will always be “Off”
since the module is not communicating with any
additional devices.
Ensure there is only one connection to either of the two
“IT” terminals.
(Normal, for last module in
an iT501 daisy-chain)
IT
On
An iT501 module is detected
connected to the “IT” plug
There is not constant communication between "IT" and
the next iT501 of a daisy-chain under normal operation,
so a continuous “On” indicator is not necessarily an
error condition.
IT
Flashing
Normal
Communication is occurring on the “IT” connections.
This is indicative of proper operation.
97018 RevA.2 06/12
Page 16
6.0 Technical assistance
6.1 Technical assistance
For technical assistance, please contact Meggitt Sensing Systems at 301-330-8811, fax 301330-8873, or email to wilcoxon@meggitt.com.
6.2 Customer service
To obtain a return goods authorization number, please contact customer service at 301-3308811, fax to 301-330-8873 or email wilcoxon@meggitt.com
97018 RevA.2 06/12
Page 17
Appendix A - Block response definition
Sending “B”, Module-#, EOT returns 58 individual data bytes related to the SPI-communications
coming from the iT-series transmitter module. Following is a brief description of the bytes and
their function:
Byte
position
01
Default value
range (Hex)
06, 0F
02
45, 62
03
01-08 (01-FF)
04-05
A5, A5
06-07
08
00-FF, 00-FF
00-FF
09
00-FF
10-12
13
00-FF (each)
00-7F
14-15
0000-01E0
16-17
8000-F130
97018 RevA.2 06/12
Description
The first byte returned from a block request is either ACKnowledge (06h)
or Negative-ACKnowledge (0Fh). If ACK is received, the first module
understands and is working on your request. If NAK is received, the first
module did not understand the query. This response is from the first
module only, not necessarily the module you requested data from.
The second byte returned after an ACK at position-01 is either “b” (62h)
or “E” (45h). “b” is the proper response from the module queried,
indicating the response bytes are from a “B” command. If an “E” is
received, it will be followed by “RR” then the module-# of the failing
transmission, then EOT (04h).
The third byte returned is the module-# that responded with the
datablock. This should match the requested module-# from the “B”
command. If a different module-# is returned, then re-issue a “R”,01,04
command to re-index the logical module positions.
These two bytes are actually the first bytes transmitted from the iTtransmitter, defined as the “StartBytes.” A5A5 is the only valid response,
and can be used for error-checking.
These two bytes contain manufacturer calibration information.
This byte is the first-stage high-pass filter calibration, if enabled (see byte
13). See “Predicting Filter Frequencies” section of this manual for a
detailed description of use.
This byte is the second-stage high-pass filter calibration, if enabled (see
byte 13). See “Predicting Filter Frequencies” section of this manual for a
detailed description of use.
These bytes contain manufacturer calibration information.
Byte-13 is the internal “Status-Flag” byte of the iT-series transmitter,
defined on a bit-by-bit basis:
b7: always 0 (would be 1 if IT wasn’t transmitting SPI)
b6: BOV in-range (0), BOV out-of-range (1)
* b5: Programmed Frequencies (0), Manual Frequencies (1)
b4: Signal in-range (0), Signal clipping (1)
* b3: Non-Integrated signal (0), Integration-processed signal (1)
* b2: 2nd-Stage High-Pass Filters Disabled (0), Enabled (1)
* b1: 1st-Stage High-Pass Filters Disabled (0), Enabled (1)
b0: Startup Timer Lockout Disabled (0), Enabled (1)
* bits used for frequency determination
Actual computed signal level. 00BAh is “100%-full-scale” in terms of 420mA output from the iT-transmitter (within 1%-accuracy), Wilcoxon
modules use other calibration bits to get accuracy even tighter (meaning
the “S” or “G” commands are slightly more accurate). A typical iT
transmitter can handle approximately 250%-full-scale signals.
Internal oscillator calibration bytes, used for frequency determination.
Page 18
18-19
0000-FFC0
20
00-FF
21-22
0003-FFFF
23-24
00C8-61A8
25
00-FF
26-27
0000-2710
28-29
0000-2710
30-32
DD,MM,YY
See “Predicting Filter Frequencies” section of this manual for a detailed
description of use.
10-bit A/D-read of BOV signal, left-justified. Use “V” or “A” commands for
BOV in terms of Volts DC.
Firmware revision-level of the IT-transmitter. This value may or may-not
affect frequency filter calculations. See “Predicting Filter Frequencies”
section of this manual for a detailed description of use.
High-pass –3dB frequency (x10) as calibrated at Wilcoxon, when unit is
in “Programmed-Frequencies-mode”. When in “Manual-Frequenciesmode” (see byte-13), this figure is a 10-bit A/D-read of iT-transmitter
potentiometer R4 (right-justified, 0000-03FFh). See “Predicting Filter
Frequencies” section of this manual for a detailed description of use.
Low-pass –3dB frequency (x1) as calibrated at Wilcoxon, when unit is in
“Programmed-Frequencies-mode”. When in “Manual-Frequenciesmode” (see byte-13), this figure is a 10-bit A/D-read of iT-transmitter
potentiometer R5 (right-justified, 0000-03FFh). See “Predicting Filter
Frequencies” section of this manual for a detailed description of use.
This byte defines the iT-transmitter model-type:
-Acceleration, Velocity, Displacement input
-Acceleration, Velocity, Displacement 4-20mA determination
-Peak, RMS, True-Peak
01= IT111, 02=IT112, 03=IT113, 04=IT121, 05=IT122, 06=IT123,
07=IT221, 08=IT222, 09=IT223, 0A=IT231, 0B=IT232, 0C=IT233,
0D=IT331, OE=IT332, OF=IT333
This model-matrix changes with new unit designs, check Wilcoxon
website for up-to-date information.
These bytes define the input-sensitivity of the iT-transmitter in
mV/Engineering-unit, x100. For example, a 500mV/g sensor input would
be C350h.
These bytes define the full-scale output rating of the iT-transmitter, in
Engineering-Units x100. For example, a 20g full-scale output transmitter
would be 07D0h.
Date iT-transmitter was calibrated at Wilcoxon
33-34
hh,mm
Time of day iT-transmitter was calibrated at Wilcoxon
35-42
20-7E (each)
43-46
00000000FFFFFFFF
47-48
0000-FFFF
49
00-FF
50
00-63
ASCII Serial-# of iT-transmitter. 8-bytes can be any ASCII character, but
will generally be “0-9”, “A-Z”, or “a-z”.
These bytes are for Wilcoxon-use, generally represent the Wilcoxon
sales-order number, combine with serial-# for verification of any RGAreturned unit testing.
These two bytes represent the employee who calibrated the unit at
Wilcoxon
This is a single-pole low-pass filter calibration, used for AAF (anti-alias
filtering) of the signal. This filter often sets the low-pass –3dB corner for
very low-frequency transmitters, or combines with the oscillator to give a
very accurate –3dB low-pass setpoint on higher-frequency units. See
“Predicting Filter Frequencies” section of this manual for a detailed
description of use.
This byte represents any startup wait-period lockout of the iT-Transmitter.
Used in combination with BYTE13 bit0.
97018 RevA.2 06/12
Page 19
51-52
0000-FFFF
These bytes contain manufacturer calibration information.
53
00-FF
54
00-FF
55
00-FF
56
0A
57
0D
58
04
This byte contains manufacturer calibration information specific to TruePeak models and Displacement models only.
This byte is currently unused, from iT-Transmitter. Check Wilcoxon
website for up-to-date information.
This byte is currently unused, but will likely contain IT501 communication
error information if the iT-Transmitter block is read by the IT501 module.
The SPI-output of the transmitter will always be 00h. Check Wilcoxon
website for up-to-date information.
Byte 56 is the 1st “StopByte” of the iT-transmitter. This is always 0Ah,
and can be used for block-transmission error checking.
Byte 57 is the 2nd “StopByte” of the iT-transmitter. This is always 0Dh,
and can be used for block-transmission error checking. This is the last
byte transmitted by the iT-Transmitter module.
Byte 58 is 04h (EOT), the byte signifying End of Transmission from the
iT501-modules, and end of block command.
97018 RevA.2 06/12
Page 20
Appendix B - Predicting filter frequencies
The only “calibrated” frequencies of an iT-series Transmitter module are the signal’s –3 dB highpass and –3 dB low-pass corners, permanently stored into the transmitter module during
calibration at Wilcoxon. These corner frequencies can only be determined through examination
of the transmitter’s data-block output, as there are no frequency indicators on the iT-Transmitter
module.
Predicting transmitter pole-response performance versus signal frequency is a somewhatdaunting process, made more difficult by the vast capabilities for the user to manually alter the
calibrated performance of the iT-Transmitter module. Determining –3dB high-pass and lowpass corners for a transmitter in “Programmed Frequency Mode” (see byte-13 of data-block) is
as simple as reading bytes 21-24 through the IT501 “Block” command (or reading bytes 18-21
of the SPI-output block from the transmitter).
In programmed frequency mode, the -3dB High-pass corner is simply:
(WORD21-22) / 0Ah
{example: BYTE21=00h BYTE22=14h, high-pass corner is 2Hz}
In programmed frequency mode, the -3dB low-pass corner is simply:
(WORD23-24)
{example: BYTE23=4Eh BYTE24=20h, low-pass corner is 20000Hz}
If, however, you must predict the –3dB band-pass of a transmitter in manual frequency mode or
want to predict the pole-response of a transmitter in either manual or programmed frequency
mode, the following series of calculations must be performed.
High-pass determination
High-pass frequency response uses bytes 8, 9, 13, 21, and 22. Determine whether transmitter
integrates the signal using BYTE13 bit3, integrated-models have one additional pole of highpass performance. Determine if the first and/or second stage filters are enabled using BYTE13
bit2 and bit1.
First, establish constants:
FIL1_2 = 9.0088
FILout = 20.734
FIL3_4 = 10.26 (only-if BYTE13 bit1 is 0, disabled)
FIL5_6 = 9.660 (only-if BYTE13 bit2 is 0, disabled)
If BYTE13 bit1 is 1 (enabled):
6
FIL3_4 7.54 10
255 BYTE08 392.16 2000
BYTE08 = 0 to 255 (convert all bytes to decimal)
97018 RevA.2 06/12
Page 21
If BYTE13 bit2 is 1 (enabled):
FIL 5_6 6.28 10
7
255 BYTE 09 392.16 2000
BYTE09 = 0 to 255 (convert all bytes to decimal)
HP, non-integrated:
f FIL 1_2
f FIL 5_6
f FIL out
f FIL 3_4
HP response( f)
2
2
2
2
1 f FIL
1
f
FIL
1
f
FIL
1
f
FIL
1_2
3_4
5_6
out
2
2
2
1
HP, integrated:
HP response( f)
f FIL 1_2 2
2
1 f FIL 1_2
f FIL int 1
2
1 f FIL int
f FIL 3_4 2
2
1 f FIL 3_4
f FIL 5_6 2
2
1 f FIL 5_6
f FIL out 1
2
1 f FIL out
FILint = 1.140
Calculating the high-pass response in deciBels (dB)
HP response_dB ( f) 20 log HP response( f)
where “f” is the frequency of interest, in Hz.
If the iT Transmitter is in manual frequencies mode (see BYTE13 bit5), BYTE21 and BYTE22
show the 10-bit setpoint of potentiometer R4. These bytes affect the high-pass filter setting,
updating BYTE08 and BYTE09, which will still be used for high-pass filter determination.
Reading BYTE22 gives a good indication if any setpoints were altered in manual frequencies
mode.
Low-pass determination
Predicting the low-pass performance is much more involved (and slightly inaccurate without
empirical testing) than high-pass performance, due to the iT-Transmitter’s switched-capacitor, 8pole, clock-driven, filter. Additionally, any analog to digital conversion process creates aliased
(phantom) signals past the sampling corner-rate. Low-pass frequency response uses bytes 06,
16, 17, and 49.
Simply calculating the 8-pole corner-frequency is sufficient-enough for low-pass prediction, as
long as the corner is >1KHz. 1KHz (approximately) is the minimum corner for the 8-pole filter of
the iT-Transmitter, lower corner frequencies are calibrated by use of the single-pole AAF filter
(see BYTE49).
97018 RevA.2 06/12
Page 22
Simple low-pass determination
The 8-pole low-pass switched-capacitor filter’s output is clock-dependent, with a –3dB corner at
1/1600th of the clock frequency calculated with the following equation. This equation requires
BYTE16:BYTE17 (word) to be broken-down into bits using the following table (be sure to
convert hex-results to decimal):
BYTE16
b
b
15
14
DIV[3:0]
(0 – 15)
b
13
b
12
b
b
b
11 10
9
OSC[9:0]
(0 – 1023)
b
8
BYTE17
b
b
7
6
b
5
b
4
b
3
b
2
b
b
1
0
Mfr. use
2DIV 2078
OSC
2
1024
f 8_pole
1600
Detailed low-pass determination
The internal oscillator speed must be determined by breaking-down BYTE16:BYTE17(word) using
the following table. Convert hex-results to decimal for all equations. Although these
calculations are not “perfect”, they should result in ±5%-accurate predictions (based on
component tolerances and 8-pole performance simulation).
BYTE16
BYTE17
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
DIV[3:0]
OSC[9:0]
Mfr. use
(0 – 15)
(0 – 1023)
Constants: (“F”=farad, “f”=frequency in Hz)
LPF inpt 2.080 10
LPF 345 1.187 10
LPF out 1.500 10
6
7
6
F
F
F
LPF integrator 5.480 10
97018 RevA.2 06/12
2
F
Page 23
Calculations:
R LPF6
F OSC 2
BYTE 06
255
1
LPF 3_5 ( f)
1
2
1 f LPF inpt
100000
2
2
1 f LPF 345
LPF 6 ( f)
3
2
1 49900ohm 4.703 10 6 F f
RLPF6
DIV
LPF 1_2 ( f)
2078
Hz
OSC
2
1024
1
LPF 7 ( f)
2
76.609
1 2 f F
osc
255 BYTE49
100000
255
RAAF 820 ( 2)
1
8
2
1 2.620 10 8F R
f
AAF
LPF 8 ( f)
1
1
2
1 f LPF out
LPF 9 ( f)
1
1
1
Non-integrated (see BYTE13 bit3) low-pass performance:
LP response( f) LPF 1_2 ( f) LPF 3_5 ( f) LPF 6 ( f) LPF 7 ( f) LPF 8 ( f) LPF 9 ( f)
Integrated (see BYTE13 bit3) low-pass performance:
1
3.5088
1 f LPF integrator 2
LPF int( f)
1
LP response( f) LPF 1_2 ( f) LPF int( f) LPF 3_5 ( f) LPF 6 ( f) LPF 7 ( f) LPF 8 ( f) LPF 9 ( f)
Calculating the low-pass response in deciBels (dB)
LP response_dB ( f) 20 log LP response( f)
System pass-band response calculation:
IT_Systemresponse( f) HP response( f) LP response( f)
97018 RevA.2 06/12
Page 24