Word doc - Atmospheric Chemistry Observations & Modeling
advertisement

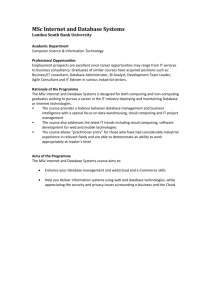
MOPITT Cloud Detection Algorithm Juying Warner, David Grant, and NCAR/MOPITT team members Abstract The measurements of Pollution in the Troposphere (MOPITT) instrument aboard the Earth Observing System (EOS) Terra spacecraft measures tropospheric CO and CH4 by use of a nadir-viewing geometry. MOPITT cloud algorithm detects and removes measurements contaminated by clouds before retrieving CO profiles and CO and CH4 total column amounts. This algorithm combines MOPITT radiances and MODIS (MODerate-resolution Imaging Spectroradiometer) cloud mask to achieve maximum coverage and accuracy. The cloud detection algorithm using only MOPITT radiances will be reviewed. The collocation method between MOPITT and MODIS field of views is also described. The performances of the cloud mask using only MOPITT radiances are evaluated when compared with MODIS cloud mask on a global base. A hybrid method that combines MOPITT and MODIS cloud mask is developed to optimize global coverage and accuracy of MOPITT CO and CH4 products. 1 1. Introduction The measurements of Pollution in the Troposphere (MOPITT) instrument aboard the Earth Observing System (EOS) Terra spacecraft measures tropospheric CO and CH4 by use of a nadir-viewing geometry (Drummond, 1992)1. The MOPITT instrument is a gas correlation radiometer that measures the CO profiles by the use of atmospheric and terrestrial thermal radiation in the spectral region near 4.7 µm. It also measures the CO and CH4 total column amounts by the use of reflected solar radiation in the spectral regions of 2.3 and 2.2 µm, respectively. In these spectral regions, the radiances are very sensitive to attenuation by clouds in the instrument field of views (FOVs). Wylie et al. (1994) 2 studied global cloud coverage using four years of High-Resolution Infrared Radiation Sounder (HIRS) data with a spatial resolution of 20 km X 20 km at nadir and found that only approximately 22-25% of the pixels were cloud free. Because MOPITT has a FOV of 22 km X 22 km, a large percentage of its global data set will be covered, or partially covered, with clouds. MOPITT cloud detection (MOPCLD), which used only MOPITT information, compares the observed thermal and solar radiances against model calculated clear sky radiances to determine the presence of clouds in the FOV as described by Warner et al. (2001) 3. The radiative transfer forward model used in MOPITT cloud detection and retrieval was developed and described by Edwards et al. (1999) 4. MOPCLD was developed by using simulated MOPITT radiances and tested against aircraft measurements. This report reviews MOPCLD procedures that are currently used in the MOPITT operational processor and discusses MOPCLD performances by comparing its decisions with those from other instruments. MODIS instrument, also aboard EOS/Terra, was designed to determine cloud properties and other physical properties in the atmosphere. MODIS cloud mask (Ackerman et al., 1998) 5 is used in MOPITT cloud detection algorithm by combining with MOPCLD to achieve maximum accuracy and global coverage. MOPITT and MODIS footprints are collocated and the technique is described in section 3. To maximize the global coverage pixels with low cloud covers are identified and used in MOPITT retrieval, since MOPITT radiances are not sensitive to the portion of the atmosphere close to the surface, and hence, to low cloud. This hybrid method that combines MOPCLD and MODIS cloud mask is discussed in Section 5. 2. Review of MOPITT cloud detection algorithm MOPCLD threshold method compares the observed radiances with calculated clear sky radiances, and currently only one MOPITT thermal channel at 4.7 µm is used. For each MOPITT spectral band, there are two sets of signals, average signals and difference signals (Drummond, 1992)1. An average signal is the average of the two signals taken in each MOPITT modulation by the sensor, and the average signals generally represent the background radiation. A difference signal is the difference of the two signals in each modulation and is primarily used to retrieve CO and CH4 information. Only average signals are examined for cloud detection. 2 MOPITT cloud thresholds, based on observed channel radiance and model calculated clear column radiance, are for day- and nighttime as: Rch1A_observed/Rch1A_calculated 0.955 (5) In inequalities (5), Rch1A is the Average radiance from channel-1, which is the CO channel from the Length Modulation Cell (LMC) at a nominal cell pressure of 20 kPa (Drummond, 1992)1. When temperature inversions occur in the atmosphere clouds are warmer than the underlying surface, the Rch1A ratio between cloudy and clear scenes may be greater than 1. The threshold method based on thermal information will not work in areas where the surface radiative cooling is very large. Therefore, only latitudes within 65 degrees North and South are included in this method. MOPITT solar channels are not currently used in the L2 processing since detailed study of calibration is still underway. This information will be added to MOPITT L2 cloud detection in the ways discussed by Warner et al., 20013. Validation of MOPCLD has been focused on comparisons with other satellite instruments, and some results from the comparisons to MODIS cloud mask are summarized in section 4. 3. Collocation of MOPITT and MODIS field of views MOPITT and MODIS instruments are aboard the same satellite platform and their measurements overlap a large geographical area close to nadir and are at the same time. MOPITT sensors scan across orbit from one side at approximately 30 satellite viewing angle to the other side, pausing for approximately 0.45 seconds to take measurements of an array of four 22X22km pixels. This array of four pixels is called a stare. Between each two stares, the sensors jump over a viewing angle equivalent to a pixel size leaving a gap between two stares, and after the sensors reach one side, they return in the same scan pattern and fill up the gaps. Figure 1 shows a schematic drawing of a MOPITT track (29 stares) overlaid by MODIS cloud mask pixels. MODIS instrument, on the other hand, scans in a continuous circle across orbit and takes measurements of the earth within 55 satellite angles. The MODIS swaths are more than twice as wide as those of the MOPITT and provide complete overlap for MOPITT passes. The spatial resolution of MODIS cloud mask is 1X1 km, even though some of the MODIS cloud decisions are based on higher resolution measurements (250mX250m and 500mX500m) (Ackerman et al., 1998) 5. Therefore, each MOPITT pixel can be collocated to approximately 484 MODIS 1X1km pixels. To find the compromise between minimizing processing time and achieving accurate collocation, we match only one nadir pixel from each MOPITT track of 116 pixels to a MODIS pixel using latitude and longitude information. We then map the pixels from each instrument using index numbers relative to the pair of collocated pixels. For each MOPITT pixel, we include a fixed set of index numbers from a MODIS granule and determine the cloudiness of the MOPITT pixel based on the cloud decisions of the 3 MODIS pixels. The matching of indices from both instruments is derived based on the measurement viewing angles. When the view angle of a MODIS pixel falls within a MOPITT view angle, the MODIS pixel is collocated to that MOPITT pixel. MODIS detectors are grouped in 10 in each scan path, and at large satellite zenith angles the pixels from one 10-pixel group overlap with the adjacent groups. Therefore, in each MOPITT pixel there are more MODIS pixels at the edges of a path than at nadir due to bow-tie effect. Figure 1. Example of MODIS cloud mask (as image) collocated to a MOPITT track, whose footprints are estimated as yellow rectangular. The color of the image is based on MODIS cloud mask confidence levels, black – 99% confidence clear, blue – 95% confidence clear, pink – 66% confidence clear, and white – cloudy. Figure 1 shows an example of the collocated MOPITT and MODIS pixels. The approximated MOPITT pixel footprints are outlined in yellow boxes, and MODIS pixels are shown as an underlying image. Black refers to 99% confidence clear, blue is 95% confidence clear, and white is cloudy. The 66% confidence clear is plotted in pink, but not shown due to the lack of pixels in that category in this example. For the definitions of MODIS cloud mask confidence levels, see Ackerman et al. (1998) 5. The cloudiness of a MOPITT pixel can be calculated by taking the ratio of the number of MODIS cloudy pixels to the total number of MODIS pixels inside the MOPITT pixel. The definition of clear for a MOPITT pixel depends on how much cloud the radiances can tolerate before impacting the retrievals beyond the precision requirements. If, however, any non-zero cloudiness in a MOPITT pixel is considered cloudy, the number of cloud free MOPITT pixels is very low. To find the appropriate cloud tolerance level, we compare the global coverage with the standard deviations of CO Table 1: Cloud-free MOPITT global coverage based on MODIS cloud mask at different cloud tolerances. Total pixels: 423772 (60S–60N). Cloud Tolerance 0.0% 2.5% 3.0% 4.0% 5.0% 6.0% 7.5% 10.0% Cloud-free MOPITT pixels Number of pixels 54392 89062 92191 98004 102400 106311 111401 119085 4 Cloud-free MOPITT pixels Global Percentage coverage 12.8% 21.0% 21.8% 23.1% 24.2% 25.1% 26.3% 28.1% retrievals for different levels of cloudiness. Table 1 lists the cloud-free global coverage at each cloud tolerance level from 0.0% to 10%. Note that the global coverage is too low (12.8%) if cloud tolerance is set to zero. Five percent of cloud tolerance agrees the most with previous studies (Wylie et al., 1994) 2, and it is used in the MOPITT operational cloud detection routines. The impact of 5% cloud tolerance to MOPITT CO retrievals is discussed in the next section. 4. Comparisons of cloud masks between MOPITT and MODIS MOPCLD is compared against MODIS cloud mask for Aug. 23, 2000 global dataset. Only latitudes within 60 North and South are included in this test because the qualities of MOPCLD at high latitudes are not reliable. NCEP meteorological and climatological data are used in the forward model calculations. Both MOPITT CO products and MODIS cloud mask presented in this section are older version beta products, and V3 versions are available now for both instruments. Table 2 shows a summary of the comparison results. The first column lists the cloud tolerance levels and the second column lists the percent of pixels for which MOPCLD and MODIS cloud mask agree. For a zero cloud tolerance (second row), MOPCLD and MODIS cloud mask agree for 83% of all pixels globally, which include both clear and cloudy cases. Column 3 shows the cases where pixels are classified as cloudy by MODIS cloud mask and as clear by MOPCLD. MOPCLD failed to detect approximately 10% of the cloudy pixels compared with MODIS cloud mask. Nearly 7% of the clear pixels classified by MODIS are detected as cloudy by MOPCLD as shown in column 4. At 5% cloud tolerance level, there is an 80% agreement between the two cloud algorithms and MOPCLD fails to detect approximately 6% of the cloudy pixels. Table 2: Comparison of MODIS cloud mask and MOPITT cloud detection. Total pixels: 423772 (60S–60N); MOPITT clear pixels: 66764 (16%). Cloud Tolerance 0.0% 2.5% 3.0% 4.0% 5.0% 6.0% 7.5% 10.0% MODIS and MOPITT agree 83.3% 81.0% 80.8% 80.2% 79.8% 79.4% 78.9% 78.1% MODIS cloudy MOPITT clear 9.8% 6.9% 6.6% 6.2% 5.9% 5.6% 5.3% 4.8% MODIS clear MOPITT cloudy 6.9% 12.1% 12.6% 13.6% 14.3% 15.0% 15.8% 17.1% To determine the effects of undetected cloud on MOPITT CO retrieval, we have studied the mean and standard deviation (SDV) of CO total column retrievals while allowing several levels of cloud contamination that passed MOPCLD threshold tests erroneously. Table 3 lists the mean and SDV of CO mixing ratio (in ppbv) at levels 350, 500, 700, 850mb, and total column CO (in Mol/cm2x1016), respectively, for eight levels of contamination by undetected clouds. The levels of cloud contamination are shown in 5 the first column where the lower bounds of the ranges of cloud cover in each MOPITT pixel are listed. The percentage cloud covers are determined by MODIS cloud mask. For an example shown at the 3rd row in Table 3, we sampled the pixels that passed MOPITT cloud detection and that contained less than 2.5% cloud cover in each pixel determined from MODIS cloud mask. The percent ratios of the SDVs over the means for CO mixing ratios and total column amount range from 8 (total column CO) - 14% (CO mixing ratio at 850hPa). For undetected cloud over 30%, the percentage range of SDVs over means increases to 12 – 20%. In summary, using only MOPITT thermal radiance threshold tests causes approximately 4-6% decrease in precision. Table 3: The mean and SDV of CO mixing ratio at levels 350, 500, 700, 850mb, and total column CO, respectively, at eight levels of contamination by undetected cloud. Undetected cloud 0% 2.5% 5% 10% 15% 20% 25% 30% 350 mb ppbv mean sdv 87.31 9.38 87.24 9.68 87.19 10.1 87.18 10.6 87.1 10.8 87.2 10.9 87.3 11.0 87.5 11.2 500 mb ppbv mean sdv 103.3 9.79 103.7 11.0 103.9 11.6 103.7 12.3 103.8 12.5 104.0 12.9 104.3 13.1 104.6 13.4 700 mb ppbv mean sdv 128.0 17.2 128.3 18.6 128.5 19.8 128.0 21.3 128.3 22.2 128.8 22.6 129.5 23.1 129.9 23.9 850mb ppbv mean sdv 143.9 20.3 144.1 22.0 144.3 23.5 143.8 25.3 144.1 26.6 144.7 27.2 145.6 27.8 146.1 28.8 Total Col. Mol/cm2x1016 mean sdv 216.4 19.2 216.4 21.4 216.5 22.5 216.0 23.6 216.0 24.6 216.6 25.1 217.5 25.8 218.1 26.5 As discussed in the last section, a five-percent cloud tolerance is used when MODIS cloud mask is incorporated into MOPITT operational cloud algorithm to obtain reasonable global coverage. Table 3 raw 4 represents the retrieval uncertainties when both MOPITT threshold tests and MODIS cloud mask are used to detect cloud. With 5% or lower undetected cloud contamination, the percent ratios of SDVs over means range approximately 10-15%. This is a decrease of approximate 1% precision compared with if 2.5% or less cloud tolerance were used, however, the global coverage increases by 3% when a 5% cloud tolerance is used. Note that Table 3 includes only clouds that cannot be detected by MOPCLD threshold method, and if all clouds were included the SDVs would have been much higher. Undetected clouds by MOPCLD represent mostly low-level clouds since MOPITT thermal channel weighting functions peak at and above 850hPa (Pan et al., 1995) 6. The thermal channel radiances are not very sensitive to clouds with tops below 850hPa. These radiances can be used in MOPITT CO mixing ratio profile retrieval once areas with low level clouds can be located. 5. A hybrid method for MOPITT V3: To maximize accuracy and global coverage, MODIS cloud mask and MOPCLD are combined in MOPITT V3 cloud detection algorithm. A MOPITT pixel is considered clear when both methods agree as clear and when there is only low cloud in the FOVs. Additional tests are taken to locate low level cloud when MODIS cloud mask classifies a 6 pixel as cloudy and MOPCLD classifies it as clear. When MODIS cloud mask classifies a pixel as cloudy and MOPCLD classifies it as clear, this pixel is considered cloudy. In areas MODIS cloud mask is not available only MOPCLD is used, and only MODIS cloud mask is used in the polar-regions (above 65N and below 65S). Low level cloud tests are performed when MODIS cloud mask identifies a pixel as cloudy and MOPCLD as clear. This indicates mostly that MOPITT thermal channel radiance for this pixel is not very sensitive to the cloud detected by MODIS cloud mask. Individual tests from the mask are examined to determine what physical properties are involved in this cloudy decision. Figure 2 shows an example of MOPCLD decision, MODIS cloud mask decision and 7 test flags in the mask for 2000 MOPITT pixels for Figure 2. An example of MOPCLD decision, MODIS cloud mask decision and 7 test flags in the mask for 2000 MOPITT pixels. daytime cases only. The left top panel shows MOPCLD radiance ratio (Robs/Rcal) in green and percent cloud cover determined from MODIS pixels inside each MOPITT pixel (in red). The left second panel shows the IR threshold flags from MODIS cloud mask averaged to MOPITT resolution. The left third and forth panels show the brightness temperature (BT) difference test and visible reflectance test, respectively. The right 1st through 4th panels show cirrus test, 1.38m channel test, 3.9-11m test, and visible ratio test, respectively. No-cloud is indicated when the flags are one, and cloud when zero (Ackerman et al., 1998)5. A value between zero and one is the average value of MODIS pixels within a MOPITT pixel, indicating that some MODIS pixels are cloudy and some are clear. 7 In this example, the majority of the pixels are clear from MOPCLD decisions shown as Robs/Rcal being larger than 0.95. The IR temperature threshold, BT difference tests and the 1.38m high cloud test test, as well as the cirrus test, indicate clear for the majority of the pixels especially for pixel numbers from 1.07x104 to 1.2x104. However, the visible reflectance test, visible ratio test and BT11-BT3.8 test show the presence of clouds in the FOVs. This is an indication that the clouds under consideration are warmer, and in general, lower clouds. The IR temperature threshold test simply checks the brightness temperature (BT) over ocean and the colder pixels are considered cloudy. BT difference test uses the principle of the differential water vapor absorption that exists between different window regions (8.6 and 11m and 11 and 12m). This test is effective in measuring high and/or thin clouds. When BT difference test views a pixel as clear erroneously, the condition of the contaminating cloud is very similar to the underlying surface, and therefore, the cloud is most likely low cloud. Cirrus cloud test and 1.38m high cloud test are both sensitive to high and thin cloud and their decisions confirm that the majority of the pixels in the example in Figure 2 are low clouds. The cloudy decisions from MODIS cloud mask for these pixels are based on the visible and solar nature of the clouds. Note that the pixels in this example are not necessary adjacent pixels. To achieve maximum efficiency in data processing, we use only a minimum number of flags to detect daytime low clouds. When MOPCLD detects a pixel as clear and MODIS cloud mask is cloudy, we check the IR temperature threshold test and the visible reflectance test. When the average value of the IR temperature threshold test is greater than 0.9 and the visible reflectance test is less than 0.95, this pixel is classified as over low clouds. These thresholds are chosen to allow certain range of noise introduced in determining the test flags with the belief that the cloud characteristics are similar within the size of a MOPITT pixel. For nighttime, only BT difference test is examined when MODIS cloud mask decision is cloudy and MOPCLD is clear. Most of the nighttime tests are effective for high clouds such as CO2 spectral band test for high clouds, H2O spectral band test for high clouds, 1.38m, BT3.7-BT12, and BT difference tests. For details of these tests see Ackerman et al., 1998. Low clouds at night are most likely detected by BT11-BT3.8 or temporal consistency and spatial variability test over water. We isolated cases as low clouds when they can not be detected by high cloud tests but detected by other/low cloud tests. The global coverage of MOPITT CO retrieval has increased to 27-30% for V3, from about 20-25% for MOPCLD only, and from approximately 13% for MODIS cloud mask only at zero cloud tolerance. This is a significant improvement over the previous versions of MOPITT processor. We also studied the SDVs of the CO retrieval to evaluate the quality of the V3 cloud processing. Table 4 lists The SDVs of CO total column amounts when MODIS and MOPCLD agree as clear skies (2nd and 4th columns) and when low-clouds are added (3rd and 5th columns) for over ocean (a) and over land (b) 8 for Aug. 23, 2000. The rows are for each 5-degree latitude range and are listed by the lower bounds. The SDVs changes for ocean at daytime are within 5% and in most of the latitude range there is approximately no change. For ocean at nighttime the SDVs changes are larger for the tropical area and are very small over the rest of the areas. The higher SDVs over tropical region at night may be due to contamination by undetected thin cirrus clouds and further study is necessary. Over land, in most of the areas the SDVs increase by less than 10%, but in some areas the change is more than 30%. Further validations are necessary to locate the sources of uncertainties. Table 4. The SDVs of CO total column amounts when MODIS and MOPCLD agree as clear skies (2nd and 4th columns) and when low-clouds are added (3rd and 5th columns) for over ocean (a) and over land (b). The rows are for each 5-degree latitude range and are listed by the lower bound. Lat 60 55 50 45 40 35 30 25 20 15 10 5 0 -5 -10 -15 -20 -25 -30 -35 -40 -45 -50 -55 -60 Daytime Nighttime MODIS/MOPCLD Low -cloud MODIS/MOPCLD Low -cloud 2.2 4E+1 8 2.3 1E+1 8 2.2 1E+1 8 2.2 7E+1 8 2.3 0E+1 8 2.3 3E+1 8 -999 9 2.3 1E+1 8 2.3 2E+1 8 2.1 7E+1 8 -999 9 2.2 9E+1 8 2.2 6E+1 8 2.2 4E+1 8 2.3 8E+1 8 2.3 5E+1 8 2.1 5E+1 8 2.1 5E+1 8 2.1 7E+1 8 2.2 7E+1 8 2.2 4E+1 8 2.2 3E+1 8 2.2 0E+1 8 2.2 1E+1 8 2.3 1E+1 8 2.2 5E+1 8 2.2 3E+1 8 2.2 4E+1 8 1.9 1E+1 8 2.0 0E+1 8 1.9 5E+1 8 2.0 7E+1 8 2.0 1E+1 8 2.0 8E+1 8 1.9 6E+1 8 1.9 9E+1 8 2.1 2E+1 8 2.0 6E+1 8 2.1 8E+1 8 2.0 4E+1 8 2.0 3E+1 8 2.0 8E+1 8 2.1 7E+1 8 2.0 8E+1 8 1.9 4E+1 8 2.0 2E+1 8 2.2 5E+1 8 2.0 2E+1 8 1.8 6E+1 8 1.9 1E+1 8 1.5 5E+1 8 1.8 6E+1 8 1.9 0E+1 8 1.9 1E+1 8 1.4 7E+1 8 1.7 3E+1 8 1.7 3E+1 8 1.7 3E+1 8 1.7 5E+1 8 1.6 7E+1 8 1.7 4E+1 8 1.6 8E+1 8 1.7 7E+1 8 1.6 9E+1 8 1.7 5E+1 8 1.6 6E+1 8 1.7 7E+1 8 1.6 4E+1 8 1.7 1E+1 8 1.6 2E+1 8 1.6 0E+1 8 1.5 8E+1 8 1.4 8E+1 8 1.5 0E+1 8 1.7 5E+1 8 1.5 8E+1 8 1.4 4E+1 8 1.4 2E+1 8 1.4 5E+1 8 1.4 4E+1 8 1.3 9E+1 8 1.4 1E+1 8 1.4 2E+1 8 1.3 9E+1 8 1.2 2E+1 8 1.3 0E+1 8 1.1 7E+1 8 1.2 5E+1 8 1.0 6E+1 8 1.1 2E+1 8 1.0 8E+1 8 1.1 0E+1 8 9.1 1E+1 7 9.3 7E+1 7 8.8 6E+1 7 8.3 0E+1 7 8.4 0E+1 7 8.4 7E+1 7 -999 9 9.7 6E+1 7 Lat 60 55 50 45 40 35 30 25 20 15 10 5 0 -5 -10 -15 -20 -25 -30 -35 -40 -45 -50 -55 -60 Daytime Nighttime MODIS/MOPCLD Low -cloud MODIS/MOPCLD Low -cloud 2.6 0E+1 8 1.9 9E+1 8 1.8 6E+1 8 2.0 4E+1 8 2.3 4E+1 8 1.8 4E+1 8 2.0 0E+1 8 2.2 3E+1 8 2.1 5E+1 8 2.3 9E+1 8 1.6 2E+1 8 2.0 5E+1 8 2.2 5E+1 8 2.5 5E+1 8 1.5 5E+1 8 2.0 2E+1 8 2.0 7E+1 8 2.2 6E+1 8 1.5 0E+1 8 1.6 7E+1 8 2.1 4E+1 8 2.4 3E+1 8 1.2 6E+1 8 1.7 5E+1 8 2.0 3E+1 8 2.3 2E+1 8 1.5 2E+1 8 1.7 6E+1 8 2.2 0E+1 8 2.3 5E+1 8 1.7 9E+1 8 1.9 0E+1 8 2.1 5E+1 8 2.4 7E+1 8 1.9 7E+1 8 1.9 5E+1 8 2.1 9E+1 8 2.3 3E+1 8 2.2 7E+1 8 2.1 6E+1 8 2.2 6E+1 8 2.4 1E+1 8 2.1 1E+1 8 2.4 7E+1 8 2.4 4E+1 8 2.1 7E+1 8 2.1 9E+1 8 2.1 6E+1 8 2.1 9E+1 8 2.2 6E+1 8 2.1 9E+1 8 2.4 6E+1 8 2.2 3E+1 8 2.1 3E+1 8 1.7 6E+1 8 2.2 2E+1 8 1.8 9E+1 8 1.7 9E+1 8 1.5 9E+1 8 1.9 8E+1 8 1.7 3E+1 8 1.6 6E+1 8 -999 9 1.9 4E+1 8 1.7 6E+1 8 1.7 6E+1 8 1.6 8E+1 8 1.7 1E+1 8 1.6 4E+1 8 2.1 4E+1 8 1.5 2E+1 8 1.6 0E+1 8 1.6 2E+1 8 1.7 7E+1 8 1.3 9E+1 8 1.4 7E+1 8 1.6 4E+1 8 1.4 7E+1 8 1.3 2E+1 8 1.3 8E+1 8 1.8 4E+1 8 1.2 9E+1 8 1.1 3E+1 8 1.3 3E+1 8 1.0 9E+1 8 1.1 3E+1 8 1.2 0E+1 8 1.2 2E+1 8 1.1 3E+1 8 1.2 0E+1 8 -999 9 1.0 8E+1 8 9.1 0E+1 7 8.0 4E+1 7 -999 9 9.4 6E+1 7 -999 9 -999 9 -999 9 -999 9 a: ocean b: land Users are strongly encouraged to check cloud descriptions in the MOPITT L2 products before using MOPITT products. Available cloud descriptions are listed in Table 5. For V3, only Cloud Descriptions 1 through 5 are included in MOPITT products. Cloud Description 0 will be added once MOPITT solar channel radiances are available. Cloud Descriptions 6 through 10 are reserved for cloud-cleared pixels and cloud clearing is not operating for V3. Cloud Descriptions 11 through 15 are used in a file that stores the radiances discarded due to cloud and other reasons. Table 5: Cloud descriptions in MOPITT L2 products. Cloud Description 0 MOPCLD only clear, thermal and cloudtop used 9 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 MOPCLD only clear, thermal only MOPCLD and MODIS cloud mask agree on clear MODIS cloud mask only clear (when MOPCLD cloudy) MOPCLD overriding MODIS cloud mask over low clouds (MODIS test flags used) MODIS cloud mask only, clear over polar regions reserved for cloud cleared pixels reserved for cloud cleared pixels reserved for cloud cleared pixels reserved for cloud cleared pixels reserved for cloud cleared pixels MOPCLD only, cloudy (when MODIS data missing) First 2 stares in a pocket discarded MOPCLD and MODIS cloud mask agrees on cloudy MOPCLD clear, MODIS cloudy and failed low cloud tests MODIS cloud mask only, cloudy over polar regions 6. Summary: We have used MODIS cloud mask in MOPITT cloud algorithm in two ways: evaluating the quality of cloud detection with MOPCLD and in a hybrid method that combines cloud decisions from both instruments. Cloud detection decisions from MOPCLD and MODIS cloud mask agree for 80% of the total pixels. However, a large number of pixels in the MOPITT CO retrievals are contaminated with cloud if only MOPCLD is used. When only MODIS cloud mask is used, the global coverage is very low because all types of clouds are detected including those that MOPITT radiances are not sensitive to. MOPITT V3 hybrid method uses MODIS cloud mask to detect clear pixels and to help detecting low clouds. The global coverage of MOPITT products has increased by more than 50% compared with using MODIS cloud mask only or MOPCLD only. MOPITT products at the polar-regions are added because of the use of MODIS cloud mask. The uncertainties defined by the ratios of the SDVs over the means have been reduced from MOPCLD only cases. The validations of MOPITT cloud detection algorithm have been limited to the comparisons with MODIS cloud mask. Global validations of this method against ground and aircraft cloud measurements are necessary. Further improvements of MOPITT cloud detection included the use of MOPITT solar channels. To further increase the global coverage of the MOPITT products, techniques that reconstruct clear column radiances using the cloudy measurements are being studied. Acknowledgements The National Aeronautics and Space Administration (NASA) Earth Observing System (EOS) Program funded this work under contract NAS5-30888. Meteorological data was provided by NASA DAO. The authors wish to thank Dr. Steven Ackerman and the MODIS cloud mask team at the CIMMS/University of Wisconsin for providing MODIS cloud mask information and many communications. MODIS cloud mask datasets are 10 provided by NASA Goddard DAAC. The operational processing of the collocation of MOPITT and MODIS measurements are carried out at NASA Langley DAAC. Reference 1. J. R. Drummond, “Measurements Of Pollution In The Troposphere (MOPITT),” in The Use of EOS for Studies of Atmospheric Physics, J. C. Gille and G. Visconti, Eds. (North-Holland, Amsterdam, 1992), pp. 77-101. 2. D. P. Wylie, W. P. Menzel, H. M. Woolf, and K. I. Strabala, “Four years of global cirrus cloud statistics using HIRS,” J. Clim., 7, 1972-1986, (1994). 3. J. X. Warner, J. C. Gille, D. P. Edwards, D. C. Ziskin, M. W. Smith, P. L. Bailey, L. Rokke, “Cloud Detection and Clearing for the Earth Observing System Terra Satellite Measurements of Pollution in the Troposphere (MOPITT) Experiment”, Applied Optics: Vol. 40, issue 8, 1269-1284, 2000. 4. D. P. Edwards, C. Halvorson, and J. C. Gille, “Radiative transfer modeling for the EOS Terra Satellite Measurement of Pollution in the Troposphere (MOPITT) instrument,” J. Geophys. Res., 104, pp. 16755-16775, (1999). 5. S. A. Ackerman, K. I. Strabala, W. P. Menzel, R. A. Frey, C. C. Moeller, and L. E. Gumley, “Discriminating clear sky from clouds with MODIS,” J. Geophys. Res., 103, NO. D24, pp 32141-32157, (1998). 6. L. Pan, D. P. Edwards, J. C. Gille, M. W. Smith, and J. R. Drummond, “Satellite remote sensing of tropospheric CO and CH4: forward model studies of the MOPITT instrument,” Appl. Opt., 34, pp. 6976-6988, (1995). 11