Apparatus and Procedure
advertisement

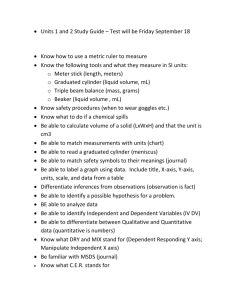
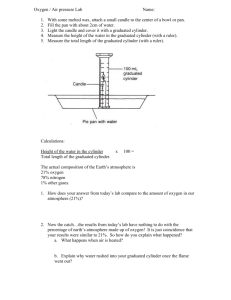
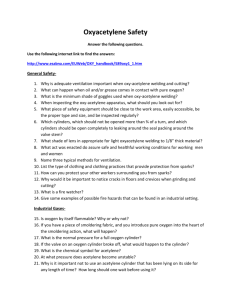
Apparatus and Procedure Overview of Operation This experiment consisted primarily of performing a series of trials in which a weighted cylinder was dropped vertically through a pipe. The pipe was rigidly attached to a lab bench by two metal supports. Near the two supports, optical sensors were placed on the pipe. The optical sensors were used to measure the velocity of the falling cylinder. The entire length of the pipe was approximately 8 feet, but was divided into several noteworthy segments. The segment of pipe from the top opening to the top optical sensor was 70 in. long and slightly curved. The remaining segments of the pipe were not curved. The segment of pipe from the top optical sensor to the bottom optical sensor was 26 in. long. The segment of pipe from the bottom optical sensor to the end of the pipe was 7 in. long. The lower section of the pipe was dubbed the “snubbing section” because its smaller diameter caused the falling cylinder to slow down. The inner diameter of the snubbing section was 1.779 in., while the inner diameter of the upper section was 1.9 in. The length of the snubbing section was 27.89 in. A small pulley wheel was supported 6 in. above the top opening of the pipe. The cylinder was hollow metal and had a removable lid that allowed small metal pellets to be added or removed. The cylinder was 6 in. long and had a diameter of 1.75 in. Conduct of the Experiment Twelve separate trials of releasing the cylinder were performed. The cylinder was dropped from 4 different heights for 3 different masses. The four heights were at 1.5 ft. intervals, starting from the top opening of the pipe. The three masses of the cylinder were 218 g, 622 g, and 1162 g. Experimental data were recorded by the Chart Recorder software program on three channels. The two optical sensors recorded a voltage that was interrupted only when the cylinder passed in front of the sensor. The time interval between consecutive interruptions in the voltage reading corresponded to the times when the top and bottom surfaces of the cylinder passed in front of the optical sensor. Additionally, there was a pressure gauge at the bottom of the pipe. The pressure increased to a peak value when the cylinder first deflected and started going back up the pipe. The pressure reading reached a final value when the cylinder slowly settled down to the bottom of the pipe. The peak and final pressures were used to compare the theoretical model with the experimental data. Results It was desired to experimentally determine the velocity of the cylinder as it struck the bottom of the pipe. It was assumed that this velocity was the same as the velocity of the cylinder while it was passing the bottom optical sensor. This velocity was calculated by dividing the cylinder length by the time interval of the cylinder passing in front of the sensor. A graph of cylinder impact velocity at the bottom of the transfer line as a function of the cylinder mass is shown in Fig. () for each of the release heights. Impact velocity VS Cylinder mass 0.5 0.45 0.4 Velocity (m/s) 0.35 0.3 Max height 2nd height 3rd height 4th height 0.25 0.2 0.15 0.1 0.05 0 0 200 400 600 800 1000 1200 1400 Mass (g) Figure 2: Cylinder impact velocity vs. Mass, for 4 heights Next, it was desired to find the point at which the cylinder deflected (came to a complete stop and began to reverse direction). The cylinder velocity immediately before the deflection was approximated as the velocity at the top optical sensor. By using this assumption, any transient velocity was ignored. The velocity at the top optical sensor was calculated by dividing the cylinder length by the time interval that the cylinder passed in front of the sensor. This velocity was multiplied by the time interval between the cylinder reaching the top optical sensor and the peak pressure. This value was the distance between the top optical sensor and the point of deflection. The distance from the top optical sensor to the deflection point is graphed in Fig 3, for each of the masses. Distance from top sensor vs Mass 0.45 0.4 0.35 Distance (m) 0.3 0.25 0.2 0.15 0.1 0.05 0 0 200 400 600 800 1000 Mass (g) Figure 3: Distance before deflection vs. Mass 1200 1400 Peak Pressure vs Height 60000 50000 Pressure (Pa) 40000 1162 622 218 30000 20000 10000 0 0.5 0.7 0.9 1.1 1.3 1.5 1.7 1.9 2.1 Height (m) Figure 4: Peak Pressure vs. Release Height, for 4 masses Discussion As shown in Fig. (), the release height of the cylinder had very little effect on the impact velocity. The cylinder mass, however, had a much more profound effect. The average impact velocities for the 218 g, 622 g, and 1162 g masses were 0.087 m/s, 0.236 m/s, and 0.419 m/s, respectively. Increasing the mass of the cylinder increases the velocity at which the cylinder hits the bottom of the pipe. The distance from the top optical sensor to the point of deflection (Fig 3) shows a similar trend as the impact velocities. As mass increases, the cylinder travels farther down the pipe before it is deflected. Although the release height had little effect on the impact velocity, the height greatly affected the peak pressure. The 1162 g cylinder showed the largest change in peak pressure due to increasing the release height, while the 218 g cylinder had only a small change in peak pressure due to increasing the release height.