ANL-Report-15NOV15
advertisement

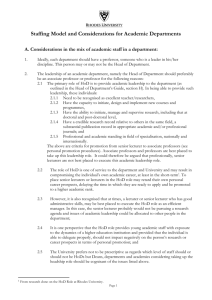
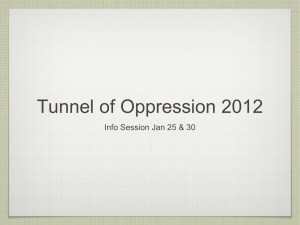
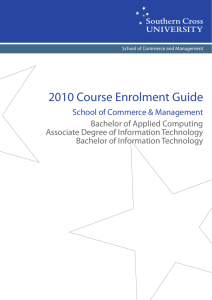
Superconducting Undulator (SCU) R&D for Free-Electron Laser (FEL) Systems (Argonne) Highlights – October 1-31 and November 1-30, 2015 Measured the gap and correlate the measured field to the physical gap. Began measuring using the LNBL pulsed-wire system. SCU Magnet and Test Cryostat Fabrication: The SCU system was warmed up, and the cryostat end covers were removed in order to measure the magnet gap, shown schematically in Figure 1, using the Capacitec Gapman Gen3 Portable Electronic Feeler Gauge shown in Figure 2. Results of the gap measurement are shown in Table 1 in µm. Values in the table are the sum of the gap between each core and the vacuum chamber at each torque. The center clamp was torqued to 60 in-lbs for all measurements. A thin layer of epoxy on the poles affects the absolute values of the gap measurement. Figure 1: A schematic representation of the two cores viewed from the side. For clarity, the vacuum chamber is not shown. The upstream (US) and downstream (DS) ends are shown, as are the 6 measurement points referenced in Table 1. Figure 2: Photo of the Capacitec device used to make these measurements. Specifications and performance information can be found at: http://www.capacitec.com/Products/Gap-Measurement-Systems/Gapman Table 1: Measured gap at each point shown in Figure 1. The end covers were then reinstalled and the SCU system was cooled down for magnetic measurement. Figure 3 shows measured peak fields and gaps along the device, and phase errors are shown in Figure 4. Figure 3: Peak fields measured along the device are shown in the upper plot, and can be compared to the measured gap deviations shown in the lower plot. Figure 4: Phase errors as a function of current. a) 5.8° RMS b) c) 2.6° RMS d) Figure 5: An exercise was done to see what the hypothetical phase error would be if we had corrected the gap accurately prior to making these measurements. The actual gap measurements are shown in figure 5a, and the measured rms phase error at 588A is about 5.8 as shown in Figure 5b. An effort was made to correct the largest gap error in software by scaling the field in the region between 30 cm and 60 cm. If the gap had been corrected to the value shown in Figure 5c, the phase error would have been about 2.6 as shown in Figure 5d. The target tolerance is 5 deg rms at full current. In total, three sets of comprehensive magnetic measurements have been made. Between one measurement set and the next, components, such as compensation coils and mechanical clamps were added. The best result achieved was 3.8° rms at 588 A, the maximum operating current. With the same SCU configuration, but with lower operating current, the measured phase errors slightly exceeded the 5° degree requirement. Some additional SCU modifications resulted in phase error improvements for all SCU currents up to 500 A, where they met LCLS-II specifications. At the maximum operating current, the phase error was 5.8° rms. Based on these studies, the ANL SCU team remains quite confident that proper SCU mechanical system design adjustments will result in SCU phase errors within specifications at all operating currents. These exercises led to some ideas for design changes that will be included in future devices. The gap separation pieces, shown in blue in Figure 6, will be extended as far as possible (without hitting the vacuum chamber) in order to minimize deflection of the tabs. A clamp will also be placed at every gap-separation location. An analysis of the existing design is shown in Figure 7a) and an analysis of the improved design is shown in Figure 7b). At 60 kN torque, the change in gap decreases by a factor of three, from about 40 µm to 13 µm. Figure 6: End view of the magnet. Extended gap-separation pieces are shown in blue. a) b) Figure 7: Analysis of the existing design is shown in a) and an analysis of the modified design is shown in b). At 60 kN torque, the change in gap decreases by a factor of three, from about 40 µm to 13 µm. The LBNL pulsed–wire system was installed on the horizontal measurement system, and is now operational. Initial measurements are shown in Figure 8a, and results after the correction algorithm was implemented into a LabVIEW program are shown in Figure 8b. b) Figure 8: Measurements with the pulsed-wire system. Measurements are shown from the pulsed wire (red) and the Hall probe (orange), which overlay quite well for these first comparisons. As of November 20th, the Argonne SCU has been disassembled. The coldmass was removed as shown in Figure 9. The cryostat, shown in Figure 10 from the side and from the end, is now empty. The cryostat and liquid helium tank are ready and awaiting the LBNL magnet. Figure 9: The SCU coldmass, including magnet, vacuum chamber, and helium tank, has been removed from the cryostat to a safe place for disassembly. Figure 10: The cryostat, side view and end view, is empty and awaits arrival of the LBNL magnet. SCU - NbTi Undulator Horizontal Tests and Measurements Table 2 shows the main design parameters of the NbTi undulator, and Table 3 shows achieved tolerances and performance parameters. All performance goals were met with the exception of the phase, which was very near to tolerance (6 deg rather than 5 deg rms). As discussed above, we believe we understand what to do in order to meet the phase requirements in the future. Table 2: Main NbTi undulator design parameters. Parameter Symbol Design Measured Units Undulator period (at 300 K) u 21 21 mm Undulator length (approx. magnetic) Lu 1.5 1.5 m Full-height magnetic gap gm 8.0 8.0 mm Full-height vacuum chamber stay-clear gap gv 5.7 5.7 mm Nominal on-axis peak field (at 80% shortsample limit) |B0| 1.67 1.67 T Nominal peak undulator parameter (at 80% short-sample limit) K0 3.26 3.26 - Nominal excitation current (at 80% shortsample limit) I0 ~590 588 A Table 3: Achieved tolerances and performance parameters. All goals were achieved except the one shown in red. We believe we have a means to achieve the phase requirements, as was discussed in the text above. Parameter Symbol Design Measured Units Measurement resolution of mean K (rms) K/Krms 0.02 0.008 % Reproducibility of mean K (after on/off) K/Kerr 0.03 0.008 % Phase shake error over undulator (rms) at maximum operating current (2 cases) rms 5 5.8, 3.8 deg |K/K| @ x = 0.4 mm 0.05 0.02 % Maximum 1st field integral (x and y) I1x,y 40 I1x = 10 ± 3 I1y = 10 ± 3 T-m Maximum 2nd field integral (x and y) I2x,y 150 I2x = 75 ± 10 I2y = 10 ± 10 T-m2 Undulator straightness* (in field direction) |y| 120 50# m Maximum field roll-off over pole width * gaps assumed constant, but gap centers vary quadratically with distance (|y| is max. deflection). # measured warm Issues and Actions • None at this time. Schedule Status • All results successfully obtained. Project delayed by about 8 weeks total from the original plan. 90-day Forecast • LBNL magnet arrives at Argonne – now forecast for beginning of December. • The Argonne team is ready for arrival of the LBNL SCU magnet in mid-November.