Abstract - Research field
advertisement

Determination of source parameters at regional
distances with broadband sparse network data
November, 2005
No. 559/183/05
by
Dr. Nadezda Kraeva
Dr. Avraham Hofstetter
Prepared for:
Earth Sciences Research Administration
Ministry of National Infrastructures
Abstract
Source parameters such as scalar seismic moment, source depth and focal mechanism are
estimated for earthquakes from three component broadband seismograms registered by the Israel
Seismograph Network using the moment tensor inversion method (Dreger and Helmberger,
1993; Dreger and Langston, 1995). The data set includes records of moderate-sized earthquakes
occurred in Israel and nearby since December 1996.
Calibrating velocity models to obtain a robust catalogue of Green’s functions was the most
important step for successful seismic moment tensor estimations. In Israel, we have found in a
trial and error process that two 1D velocity models are adequate for the recovery of the seismic
moment tensor. The library of calibrated Green’s functions was precomputed for these velocity
models as a function of source-receiver distance and source depth.
The comparison obtained from focal mechanisms with those of first motions demonstrates
that for sufficiently strong events (MW ≥3.7) moment tensor inversion method gives compatible
or even more accurate solutions. It is shown also that a resolution of the source depth is being
improved with increasing of the moment magnitude and number of stations taking part in
inversion, and the local and moment magnitude discrepancy decreases with magnitude gain,
from about 0.8-1.0 magnitude units at MW=2.9 up to about 0.1 at MW=4.0-5.1. The dominant
style of faulting corresponding with the obtained moment tensor solutions is strike-slip.
2
Introduction
The study of earthquake mechanisms is an attractive approach for a quick and inexpensive
survey of the state of stress of areas in Israel (e.g. Hofstetter et al., 2005). The widely used fault
plane solution method, based on P wave onsets for this purpose in regions with large and dense
short-period seismic stations network, in some cases cannot be applied successfully here. The
structure of the Israel Seismograph Network (ISN) is elongate from south to north parallel with
Dead Sea rift and active nodal plane of the typical earthquakes mechanism solution. The oneside data may have poor takeoff angle and azimuth coverage and so not insure reliable source
mechanism by the first-motion technique without additional phase data observed in neighbor
countries. Besides, the small to moderate-sized earthquakes are too weak to be recorded
teleseismically, and their mechanisms cannot be determined by the far stations.
With the deployment of digital broadband network in Israel we are now capable of caring
out regional distance moment tensor inversion of moderate-sized earthquakes using a few
methods. Some of them (Wallace and Helmberger, 1982; Fan and Wallace, 1991) use body
waves; others deal with surface waves (Patton and Zandt, 1991; Thio and Kanamori, 1995).
Herein we will apply the method of the complete waveform inversion which incorporates both
types of waves (Dreger and Helmberger, 1993; Dreger and Langston, 1995). The advantage of
this method over others is that it provides very good constraint on the focal parameters even in
the case when we have data just of a single station. The main drawback here is that there can be
complex interference of multiple crustal phases leading to complex broadband waveforms which
may be difficult to understand. However, at a low frequency approach used in this method for a
point in space and time source representation, relatively simple 1-D velocity models may be
applied to effectively model the data (Helmberger and Engen, 1995).
It is important that in addition to a focal mechanism this method gives also other important
source parameters such as seismic moment and centroid depth. Scalar seismic moment, derived
from the moment tensor, is used as a common scaling parameter in the regional magnitudes
calibration (Mayeda et al., 2003) and in seismic hazard, such as the relationship between seismic
moment and fault rupture length (Wells and Coppersmith, 1994). It is also important for nuclear
explosion monitoring which uses scaling of source parameters such as the relationship of seismic
moment to radiated energy (Mayeda and Walter, 1996).
The discussed moment tensor inversion routine is tested and applied to the earthquakes
occurred in different countries (e.g. Pasyanos et al., 1996; Kim and Kraeva, 1998, 1999;
Fukuyama and Dreger, 2000; Kim et al., 2000; Pinar et al., 2003). At the UC Berkley
seismographic station this method was automated to work in real-time manner for events in
northern and central California (Thio and Kanamori, 1995; Pasyanos et al., 1996) which can help
emergency officials assess potential damage after an earthquake as well as provide immediate
tectonic interpretation of the faulting process.
This method was already successfully applied at GII recently for waveform inversion of the
aftershock sequence of the 22/11/1995 Gulf of Aqaba earthquake (Hofstetter et al., 2003) from
data of one station. Now we investigate the possibility to use for calculations all Israeli
broadband stations simultaneously comparing result focal mechanisms with those of the shortperiod local network.
Inversion method
In order to solve the equation of motion resulting from slip in the fault plane of an
earthquake source, the source should be represented in terms of body forces acting within the
Earth. The theorem of representation (Aki and Richards, 1980) gives a general equation relating
3
the observed displacement field u n x, t to the Green’s function Gnk and the density distribution
of the equivalent body forces fk within the source volume V:
u n x, t Gnk x, t; r , f k r , dV r d
(1)
V
To simplify this equation to a form suitable for inversion, the following assumptions should
be made (Dreger, Langston, 1995). First, we assume that the Green’s function varies smoothly
within the volume V; then, it can be expanded into the Tailor series relative to the centroid of the
source. Farther, if the seismic signal has a wavelength much greater than the source size R,
only the zeroth term of this expansion may be retained (spatial point-source approximation), and
the equation (1) can be approximately rewritten as
u n x, t Gnk ,i x, t M ki ,
if R
(2)
The convolution (2) is the fundamental system of equations, the solution of which is
searched by the seismic moment tensor inversion, and may be written in the matrix form as
u GM ,
(3)
where u is the multi-component and multi-station vector of data, M is the solution vector of the
moment tensor, G is the kernel of the Green’s function. In the case of synchronise source, each
element of the moment tensor has an identical time function which, as a consequence of the
long-wave approximation, may be approximated by function (point-source approximation in
time), M kj M kj and convolution (2) – (3) becomes a simple matrix product.
The displacement field generated by an arbitrarily oriented double couple (DBC)
representing a shear source, can be expressed as the sum of the products of scalar weights Ai and
Green’s functions (zss, zds, etc.) calculated for the fundamental dislocations (Dreger, Langston,
1995; Langston, 1981):
u z r , t A1 zss r , t A2 zds r , t A3 zdd r , t
u r r , t A1 rss r , t A2 rds r , t A3 rdd t , t ,
u t r , t A4 tssr , t A5 tdsr , t
(4)
where z, r, and t denote, respectively, the vertical, radial and tangential components in a
cylindrical coordinate system. The following dislocations are referred to as fundamental ones: a
strike-slip fault on the vertical plane (ss), a dip-slip fault on the vertical plane (ds), and a dip-slip
fault on a plane inclined at an angle of 45 (dd). The Green’s functions for 45 dd faults are
calculated with a fault plane striking at an azimuth of 45, and those for ss and ds faults, with
fault planes striking at a 0 azimuth.
The scalar weights Ai in (4) depend nonlinearly on source parameters as the strike, dip and
rake, but they are linear combinations of five independent deviatoric elements of the moment
tensor M xx , M yy , M xy , M xz , M yz (for the shear source, M zz M xx M yy ):
4
A1 M yy M xx cos2 M xy sin 2
A2 M xz cos M yz sin
1
M xx M yy
2
1
A4 M xx M yy sin 2 M xy cos2
2
A5 M yz cos M xz sin
A3
,
(5)
where is the back epicentre azimuth. Introducing the Green’s functions of an isotropic source
rep and zep into the G matrix, one can obtain a system of linear equations that provides the
solution of the forward problem for an arbitrary source. The linearity of this solution, which
results from the above assumptions, makes it easy to obtain the solution of the inverse problem:
M G TG
1
G Tu ,
(6)
using the standard least-squares method. Thus, if the Green’s functions for the fundamental
sources and for an isotropic source are known, it is possible to reconstruct all elements of the
moment tensor from seismograms recorded at one or several stations. In practice, owing to the
noise in data, the lateral heterogeneity of the earth, and deviations of the real earthquake source
from the point-source model, the seismic moment tensor is always more complex than in the
DBC case (Stein, 1987), after the diagonalization, it takes the form
M 1 2
3
(7)
with the eigenvalues 1 2 3 and the eigenvectors n1, n2, n3. The latter describe the
orientation of the principal stress axes in the source. If the tensor M were consistent with a
simple DBC, the following relations would be valid: 1 2 and 3 0 . In reality the seismic
moment tensor М obtained as a result of inversion (6) is close to the double couple
representation but not entirely.
To provide a physical interpretation of the tensor obtained, we decompose it into three parts,
representing an isotropic source, a major DBC, and a minor double couple (compensated linear
vector dipole CLVD):
1
E M 0
0
E
M 0 M 1 ,
2
3 E
0
M 1
(8)
where E 1 2 3 3 , M 0 1 E and M 1 3 E . The eigenvectors of initial and
deviator tensors are the same. The mechanism of a given earthquake is assumed to be the
orientation of the major DBC, whose percentage in the moment tensor can be calculated from the
equation (Dreger and Langston, 1995)
PDC 1 2 3
1
100%
(9)
Dreger and Langston (1995) implemented this method of seismic moment tensor inversion
in the TDMT_INV software package, which uses the whole waveforms recorded at local and
5
regional distances, including both body and surface waves; as a result, it is possible to adequately
reconstruct the source parameters by using data from only one station (Dreger and Helmberger,
1993; Fan and Wallace, 1991). To calculate the regional Green’s functions, the TDMT_INV
package was supplemented by a module of Saikia (1994) based on a modified reflectivity
method (Fucks and Muller, 1971; Kind, 1979), which employs the formalism of propagator
matrices in the frequency-wavenumber domain for constructing complete synthetic seismograms
of wave fields in a model of horizontally homogeneous plane-layered isotropic crust lying on a
half-space. Saikia improved the reflectivity method by applying Filon's interpolation scheme
(Frazer and Gettrust, 1984) to integrate rapidly oscillating functions emerging in calculations,
thereby lowering the wavenumber sampling rate and essentially reducing the computation time.
The source depth h is determined iteratively by performing inversions with Green’s
functions calculated for a number of depths. The source depth can be found by studying the
behaviour of a parameter VR (variance reduction), which is a measure of coincidence of the
observed (di) and synthetic (si) seismograms:
d i si 2
VR 1
100% .
d i 2
(10)
VR = 100% means complete coincidence (in the given frequency range). The depth yielding a
maximum measure of coincidence is considered to be an optimal source depth for the given
model.
Israel Seismograph Network
We use here broadband waveform data recorded by the Israel Seismograph Network (ISN)
during all its installation period since 1996 (Table 1, Figure 1). At the waveform inversion we
should be sure that all the three channels, EW, NS and Z, have correct polarities. In other case
we will never work out a correct moment tensor inversion solution. So the first stage in our
project was testing of polarities of broadband stations, results of which, being important enough,
were published in the report (Kraev, 2005). We used for testing the records of 10 strong
teleseismic earthquakes with known focal mechanisms based on NEIC and Harvard CMT, which
occurred during the last decade. The knowledge of the mechanism gives us the true direction of
the vertical first P-wave motion in the point of observation, and the known relative stationepicenter geometry gives us an opportunity to predict directions of the horizontal P-wave onsets.
The comparison of the probable signs of EW, NS and Z projections of the P-wave first
arrivals with the observed ones recorded by ISN from these 10 earthquakes has shown that:
- stations EIL, JER, CSS and MRNI have correct polarities;
- stations KSDI, AMZI, HRFI, MMLI and KZIT have reverse polarities at all of the three
channels, so every time we use data of these stations, we should change their polarities.
The additional investigation made after that report publication have shown also that the
broadband station JER had reverse polarities at all the three channels some time after its
installation, at least in the first quarter of 1997, and the broadband station MRN had the reverse
polarity at EW component at least on March 8, 1999. These conclusions were made after studies
of P-wave polarities of 5 supplementary teleseismic events (Table 2) recorded by Israeli stations
with known mechanism solution (Table 3, Fig. 1).
6
Table 1. Location, start and end times of Israeli broadband stations
Station
code
Latitude
(°N)
Longitude
(°E)
Start time
mo/dy/yr (Julian day)
End time
mo/dy/yr (Julian day)
EIL
29.6712
34.9520
11/21/1996 (326)
-
JER
31.7724
35.1981
08/07/1996 (220)
06/30/2003 (181)
CSS
34.9620
33.3310
12/10/1998 (344)
-
MRNI
33.0118
35.3921
03/11/1998 (070)
01/24/2002 (024)1
KSDI
33.1920
35.6585
12/09/2001 (343)
-
AMZI
31.5491
34.9123
02/26/2002 (057)
-
HRFI
30.0364
35.0370
02/11/2002 (042)
-
MMLI
32.4379
35.4216
12/09/2001 (343)
-
KZIT
30.9067
34.3978
12/09/2001 (343)
-
_______________________________________________
1
Station MRNI has been replaced by the array of broadband stations acting nowadays.
Table 2. Locations and magnitude parameters (from USGS/NEIC) of 5 additional earthquakes
used for testing of polarities of broadband stations
Event
Date
O.T.(UTC) Latitude Longitude Depth Mw
ID (mo/dy/yr) (hr:mn:sec) (°N)
(°E)
(km)
Location
1
03/08/1999
122548
52.056
159.520
21
6.8
Kamchatka Peninsula, Russia
2
12/27/1998
003826
-21.632
-176.376
147
6.8
Fiji-Islands
3
10/10/1998
163219
-0.403
119.840
11
6.0 Minahassa Peninsula, Sulawesi
4
03/26/1997
020857
51.277
179.533
12
6.6
Aleutian Islands
5
02/27/1997
210802
29.976
68.208
7
7.0
Pakistan
Table 3. Focal mechanism solutions (from NEIC and Harvard CMT database) of earthquakes
listed in Table 2
Nodal planes
Event
ID
1
Principal axes
2
T
N
P
Strike
Dip
Slip
Strike
Dip
Slip
Az
Plg
Az
Plg
Az
Plg
1
169
27
51
31
70
108
328
61
205
16
108
23
2
230
10
-58
18
81
-95
112
36
18
5
281
53
3
338
32
13
236
83
122
177
43
52
31
301
31
4
250
19
101
59
72
86
323
63
60
3
152
26
5
334
7
145
98
86
85
3
48
99
5
194
41
7
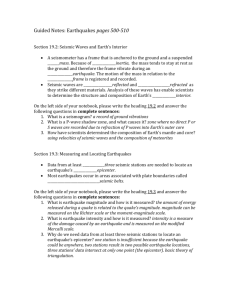
Figure 1. Location of the Israeli broadband stations (triangles) acting nowadays and in the nearest past
(Table 1) and of earthquakes studied in this work (stars). The red stars highlight those events for which it
was possible to find focal mechanism solution making moment tensor inversion. These solutions are
shown left- and rightwards from their epicenters on the map.
8
Table 4. The P-wave ray parameters for the earthquakes (Tables 2-3) observed by broadband
stations in Israel
Station
code
Back
azimuth
(°)
Azimuth Distance Takeoff
(°)
(°)
angle
(°)
Predicted sign of
P-wave first arrival
Observed sign of
P-wave first arrival
EW
NS
Z
EW
NS
Z
Event 1
EIL
31
314
85.3
20
-
-
+
-
-
+
MRN
31
315
82.1
20
+
-
+
-
-
+
CSS
30
318
81.4
21
-
-
+
-
-
+
Event 2
EIL
81
292
150.7
10
+
+
-
+
+
-
CSS
71
303
150.8
10
+
+
-
+
+
-
Event 3
EIL
93
300
85.8
18
+
+
-
?
?
-
MRNI
93
303
85.6
18
+
+
-
?
+
-
JER
93
301
85.7
18
+
+
-
+
?
-
Event 4
EIL
21
330
93.2
15
-
-
+
-
-
+
JER
21
330
91.2
15
-
-
+
+
+
-
-
~0
+
+
~0
-
Event 5
JER
85
282
28.3
29
Event 1
Event 2
CSS
MRN
EIL
CSS
EIL
Event 3
MRNI
JER EIL
Event 4
Event 5
JER
EIL
JER
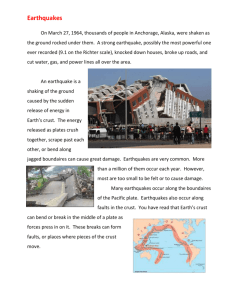
Figure 2. Focal mechanism solutions of the teleseismic earthquakes (Tables 2-3) registered by the Israeli
broadband stations in 1997-99. Solid and open triangles represent the position of Israeli stations with
positive (up) and negative (down) signs of the P-wave first arrival (Z component), respectively.
9
Data preparation
The discussed method deals with digital 3-components broad band data. Due to the point
source assumption being the base for Dreger's inversion method, three work frequency bands
depending upon the magnitude are usually used: 0.02 to 0.10 Hz (3.5MW<4.0), 0.02 to 0.05 Hz
(4.0≤MW<5.0), and 0.01 to 0.05 Hz (MW5.0). The higher the magnitude of the event the lower
the frequency of filtering should be in order to move away from source corner frequency
complications. Furthermore, low-pass filtering allows us to escape source-finitness and path
propagation effects. The minimum magnitude reflects the limits imposed by the background
noise in the frequency passband used by the inversion. So we can use as input broad-band BBand long-period LP-channel data with preliminary long period filtration. The original digital
records should start well before the first P arrivals from the earthquake studied and include all
wavelets (P, S and surface wave groups).
The first step before inversion is to produce the ASCII, three-component data files used by
TDMT_INV. This step involves using SAC to demean, deconvolve instrument response, change
incorrect polarities, integrate to displacement (cm), rotate to transverse and radial components,
bandpass filter, resample to 1 sps, and finally write the ascii data files. All of this may be done
using a single script “data-prep” written for ISN data (see Appendix 1). The command line
arguments of the script “data-prep” are the station name, name of channel, the latitude and
longitude of the event, and the highpass and lowpass filter parameters in Hz. We can use any
frequency passband we wish provided that both the data and Green’s functions were processed
using the same filter. Running the “data-prep” script makes a note of the azimuth and distance in
the file “azim.dat”, which we need to point as parameters in further inversion, and creates the
files “<station name>.data” which are input in the inversion.
Note that the broadband ISN is equipped by the STS-2 seismometer which parameters such
as response constant, poles and zeros are listed in the file “sts-2.pz” (Appendix 1). Note farther,
that the SAC utility “transfer” using this pole-zero response changes only the form of a signal if
it has frequency components outside the flat part of the seismometer amplitude response and
does not convert data from counts to velocity in m/s. To make this conversion, we need to divide
our digital velocigrams by the sensitivities which values depend of the model of datalogger; the
one Q380-M is installed at the EIL station, while other ISN broadband stations are equipped
nowadays by the Q4120-M datalogger. Sensitivities of two kinds of systems formed by these
dataloggers and the STS-2 seismograph slightly differ (see Appendix 1).
Green’s function calibration
In general, the search of Green’s functions providing the best fit to observational data is the
most important and time-consuming part of the problem. The crustal structure may be very
complex and poorly studied, so that only a zeroth approximation of the real cross section can be
constructed a priory. Therefore, one is frequently faced with the need to go through a long
fitting procedure to select an effective model of the medium whose synthetic seismograms would
coincide, within a reasonable accuracy, with the observed seismograms. Undoubtedly, this model
can be non-unique. Note that it does not necessary represent the real crustal structure but rather a
model that better represent the overall source to receiver ray propagation path. On the other side,
the found model and its corresponding Green’s functions can be considered suitable only if the
inversion solution of the source mechanism computed using this model is confirmed by other
methods. This time-consuming procedure is referred to as the Green’s function calibration.
Fortunately, relatively simple velocity models can be used at low frequencies, which this
inversion method is intended for (Helmberger and Engen, 1980).
10
The measure of coincidence (10) can also serve as a quantitative criterion for assessing of
the particular model effectiveness while calibrating Green’s function. Note that the consequences
of an incorrect model of the cross-section are usually compensated for by the source-depth
variation if the errors in parameters of this model are small (Fan and Wallace, 1991; Dreger and
Helmberger, 1993; Walter, 1993). As a result of this compensation, an incorrect source depth can
be associated with a reasonable estimation of the source mechanism.
In this work, the 202004/02/11 Dead Sea earthquake (ML=5.2) was chosen as the calibration
event because it is the strongest event occurred on the land territory of Israel and the only one
which mechanism was estimated by Harvard University during the last decade. Calculations
have shown that among existing velocity models of Ginzburg and Folkman (1980), BenAvraham and Ginzburg (1990) based on gravity and seismic refraction data, and variations of
these models, the one of Feigin and Shapira (1994) is the best for the Dreger's moment tensor
inversion when using all the broadband stations except for CSS (Table 5, Figure 3). The variance
reduction in this case is very high, VR=83.5-94.1% when this model is employed for inversion
of data recorded by the every station from 6 ones acting nowadays in Israel (Table 6, Figure 3).
This model being routinely used to locate Israeli earthquakes, works the best also in our case,
because it was constructed using P and S crust onsets recorded by short-period ISN stations from
five calibration explosions located so that most of propagation paths used in our study fall into
the net composed by multi-cross calibration traces (Feigin and Shapira, 1994).
Table 5. 1-D velocity model in Israel (Feigin and Shapira, 1994)
Depth of
bottom layer
km
2.59
9.79
31.43
Layer
thickness
km
2.59
7.20
21.64
60
Vp
km/s
Vs
km/s
Density
g/cm3
QP
QS
4.36
5.51
6.23
7.95
2.41
3.1
3.6
4.45
2.4
2.6
2.8
3.26
600
600
600
600
300
300
300
300
Velocity, km/s
0.00
2.00
4.00
6.00
8.00
0
10
Depth, km
20
30
40
50
1
2
3
4
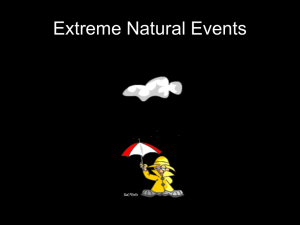
Figure 3. P- and S-wave velocity profiles for the
two 1-D models used in the moment tensor
inversions: (1-2) Feigin and Shapira (1994)
model for traces inside Israel; (3-4) the model for
traces between the Cyprus station CSS and Israeli
stations based on the studies in (Makris et al.,
1983).
60
11
Table 5 lists the model parameters, layer thickness, P-velocity, S-velocity, density and
attenuation parameters QP, QS. Note that when computing Green’s functions, the source must be
located at an artificial boundary where the velocities above and below are the same. Densities in
this and a following model were fit on the base of numerous gravity data of Israel (e.g. Hofstetter
et al., 1990; 1991; 2000). Parameters QP and QS were set equal to their averages over the entire
crust (Lay and Wallace, 1995). Note that tests of the moment-tensor inversion using a wide range
of Q values made in (Pasyanos et al., 1996) showed that attenuation is a highly insensitive
parameter. The reason is that this method works for such large wavelengths that the number of
cycles over the local and regional distances used is small.
Table 6. Results of the calibration moment tensor inversion of 2004/02/11 ML=5.2 Dead Sea
earthquake
name of
station
AMZI
CSS
EIL
HRFI
KSDI
MMLI
KZIT
All 7
together
delta
(km)
65
415
230
190
165
85
140
5.2
5.2
5.2
5.2
5.2
5.4
5.3
5.3
M0 x1023
(dyne cm)
6.96
6.36
7.66
7.99
7.59
16.5
8.94
9.05
strike
(°)
90 / 350
75 / 339
250 / 342
251 / 344
245 / 338
253 / 160
76 / 346
78 / 344
dip
(°)
77 / 52
82 / 53
80 / 75
81 / 71
81 / 72
69 / 81
89 / 87
79 / 71
rake
(°)
-141 / -16
-143 / -10
164 / 10
161 / 10
162 / 10
-170 / -21
-177 / -1
-161 / -12
5.31
11.01
80 / 3401
79 / 501
-139 / -151
depth
(km)
18
30
24
21
18
24
27
24
MW
261
%VR
94.1
79.9
93.0
89.7
94.2
83.5
89.2
67.1
%
dc
80
70
88
74
78
52
98
37
871
________________
1
HRV CMT-solution
Table 7. 1-D model of the crust for traces between the Cyprus station CSS and Israel based on
studies in (Makris et al., 1983)
Depth of
bottom layer
km
2.5
13
25
Layer
thickness
km
2.5
10.5
12
60
Vp
km/s
Vs
km/s
Density
g/cm3
QP
QS
2.5
4.75
6.7
7.95
1.45
2.63
3.75
4.42
2.0
2.42
2.9
3.38
200
600
600
600
100
300
300
300
The mismatches in phase and misfit in amplitude between observed and synthetic
waveforms contain useful information about corrections needed to better calibrate the velocity
models. This principle was used during the search of the effective velocity model for traces
between Cyprus and Israel. We tested a lot of variations of the Levant Basin models resulted
from the data of a seismic refraction and reflection experiment (Ben-Avraham et al., 2002), but
every time synthetics misfit to the real seismograms. We have found that the best velocity model
is the one that we constructed on the base of Makris et al. (1983) seismic refraction profiles
between Cyprus and Israel in their central ocean-type part of the crust (Table 7, Figure 3). The
variance reduction for this model is 79.9 % for the only station CSS and 67.1% in the case of
combine solution for 7 stations acting nowadays (Table 6, Figure 4). Both these solutions are
very close to the Harvard CMT (Table 6), and to that obtained from data of the short-period
12
Figure 4. (a-c) Calibration single station cross-correlation
results and best-fit moment tensor solutions of the 2004/02/11
Dead Sea ML=5.2 earthquake from data of AMZI, CSS and EIL
broad-band stations calculated using 1-D model of the crust in
Israel of Feigin and Shapira (1994). The solid line corresponds
to observed seismograms and the dotted line to synthetics.
13
Figure 4. (d-f) The same as in (a-c) but from data of
HRFI, KSDI and MMLI broad-band stations.
14
Figure 4. (g-h) Comparison of inverse solutions of the
2004/02/11 Dead Sea ML=5.2 earthquake from data of KZIT
BB station obtained in the two frequency bands, 0.01-0.05
and 0.02-0.05 Hz, respectively. Bandwidth narrowing allows
us to escape long-period noise distorting the signal. (i) The
combined inverse solution of this earthquake from data of 7
stations in different frequency bands.
15
regional networks deployed in Israel, Jordan and Cyprus (Figure 5) from signs of first P-wave
onsets (Figure 6,a) using the standard program of Reasenberg and Oppenheimer (1985).
Let us consider the results of moment tensor inversion of this event (Figure 4, Table 6) more
closely. A few important moments should be discussed here. First of all, in our case two stations
from seven (AMZI and MMLI) are placed in the intermediate-field range ( Δ < 100 km), whereas
the Dreger’s routine applied for the far-field range (100 km < Δ < 1000 km). To continue to
work in the far-field approximation, we should stay in the frequency band when a wavelength is
at least less than an epicenter distance. It is possible if to shift our passband to the right in the
more high-frequency area, since, say, 0.04 Hz up to 0.10 Hz. At larger frequencies the influence
of lateral inhomogeneities and body-wave phases becomes too large.
What is more, the amplitude displacement spectra calculated for these close stations (Figures
7,a,b) show that at these distances (65 and 85 km) the spectrum of a signal itself is shifted to the
right in comparison with the far-field stations, EIL for example (Figure 7,c). On the one hand, it
is less filtrated by absorption and attenuation on the ray path, and on the other hand, the longperiod surface waves are not formed yet.
Finally, both these stations register the increased level of long-period background noise in
comparison with the other stations. To escape the long-period microseism contamination of the
signal we can only restrict our frequency band on the left by 0.04 Hz. But in the case of combine
solution for 7 stations, despite its closeness to the Harvard CMT solution, we have got the very
low percent of double couple (37%) in comparison with those estimated for single stations
except MMLI when it was 52%. Moreover, Figure 8 shows how the variance reduction of this
combine solution varies with the source depth increasing. This dependence turns out to be not
stable comparing with all single station covers and has the sharp step with amplitude more than
60%. It may be explained by the noise distortion of the MMLI waveform even in the restricted
bandpass (see Figure 7,b), or by the existence of some large-scaled heterogeneity on the trace, or
by the deviation of the source from a point form. In any case, this problem disappears when we
exclude MMLI data from the combine solution using data of only 6 stations (Figures 6,b and 8).
This essentially increases the variance reduction and the percent double couple and in addition
make the VR(h) dependence stable, more expressive and convex. The source depth estimated in
this inversion (18 km) is close to that obtained from short-period regional seismic networks (17
km). This moment tensor solution was accepted as the final one for this earthquake.
Another station KZIT is also rather noisy (Figure 7,d) but its frequency restriction may be
more weak in the case of the given earthquake and equal to 0.02 Hz. Figures 4,g,h demonstrates
the dramatic difference between two moment tensor solutions obtained for two frequency bands,
the recommended band 0.01-0.05 Hz and the constrained one 0.02-0.05 Hz.
The constrained frequency interval 0.04-0.10 Hz may be used for routine purposes also at
investigation of small events with MW=3.2-4.0, for which there is very little energy at periods
longer than 30 sec. As a rule, their waveforms are registered on the very high noise, and
additional filtration essentially improving the signal to noise ratio, almost do not cut the longperiod signal components.
To simplify and speed up the further routine inversion procedures, a catalogue of Green’s
functions prefiltered in the frequency bands, recommended and restricted (0.01-0.05 Hz, 0.020.05 Hz, 0.02-0.10 Hz and 0.04-0.10 Hz), was computed for the two described above 1-D
models. These Green’s functions were generated over a range of source depth (since 2, 3 km up
to 30 km with 3 km depth increments) and source-station distance (40-600 km) rounded to the
nearest interval of 5 km.
16
Figure 5. Stations of the short-period regional networks deployed in Israel, Jordan and Cyprus which data
was used in this report for estimates of P wave first motion plane solutions.
17
Figure 6. (a) The first motion solution for the 2004/02/11 Dead Sea ML=5.2 earthquake obtained from
short-period regional data. Compression (up) first motions are pointed by circles and dilatation (down) by
triangles. Red-colored signs correspond to the direct waves. (b) Cross-correlation results and combined
best-fit inverse solution of the 2004/02/11 Dead Sea ML=5.2 earthquake from data of six stations (AMZI,
CSS, EIL, HRFI, KSDI and KZIT) in different frequency bands. The black line corresponds to observed
waveforms and the red one to synthetics.
18
Figure 7. (a-b) Input raw displacements (upper three on the left) and after bandpass filtration (lower three
on the left) recorded at broadband stations AMZI and MMLI for the 2004/02/11 Dead Sea ML=5.2 event,
and input displacement specters (on the right). Red, green and dark blue colors of lines correspond to EW,
NS and Z components.
19
Figure 7. (c-d) The same as in (a-b) but at EIL and KZIT broad-band stations.
20
Variance Reduction, %
100
amzi
80
css
eil
60
hrfi
ksdi
kzit
40
mmli
7 st.
20
6 st.
0
0
5
10
15
20
25
30
Focal depth, km
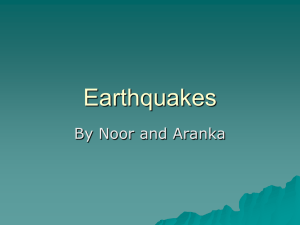
Figure 8. Variance reductions for the 2004/02/11 Dead Sea ML=5.2 earthquake as a function of source
depth from single-station inversions (AMZI, CSS, EIL, HRFI, KSDI, KZIT and MMLI separately), the
seven stations inversion (blue solid line, all mentioned stations together) and the six stations inversions
(red solid line, all stations except MMLI).
Inversion results
Waveform data for 33 earthquakes with the local magnitude M L greater or equal to 3.5,
occurred in Israel and nearby during the broadband ISN existence since 1996, was investigated
to evaluate the source parameters such as focal mechanism, seismic moment and depth. In this
data set there were only 2 events with estimated moment magnitude M W>4 and 6 events with
MW>3.5. Table 8 lists the event information, and Figure 1 shows the locations of the broadband
stations and studied events and their best-fit mechanism solutions.
As was discussed in previous chapters, the method that we used to determine seismic
moment tensor utilizes data in the 0.01 to 0.05 Hz or narrower passband to reduce the impact of
the Earth structure and source-finitness on the inversion results. If noise level is high in this
passband then it becomes impossible to determine the seismic moment tensor. Unfortunately for
many of the earthquakes in Israel the noise on their records was too high. This reduced the
number of events that it was possible to obtain focal mechanism solutions for to only 18 (Tables
8, 9). For the other 15 ones we could estimate only the scalar moment (M0) and moment
magnitude (MW) using only those stations which waveforms could be correlated with synthetics
correctly on the noise background. Prior to inverting the data, input waveforms are aligned with
the fundamental fault Green’s functions (tss, tds, etc.) by cross-correlations varying the sample
offset. Sometimes when the data is noisy this sample offset may become far from the real one
and as a result not an earthquake but microseism wavelet is chosen as a signal to be inverted. If
do not control this process the magnitude of the noise may be estimated.
The minimum local magnitude that was processed is set at ML≥3.5. This value reflects the
limits imposed by the background noise in the frequency passband used by the inversion. Really,
as follows from the Table 8, we were able to obtain full solutions only for one event from five
investigated with ML=3.5. And only for events with the moment magnitude since MW=3.7 we
could obtain full solutions without missing.
21
Every time when it was possible, we used at least two or more well distributed stations,
thereby minimizing the effect of the model uncertainty along any one single ray path on the
moment tensor solution and improving its stability. We applied the distance weighting, so the
more distant stations are given larger weights. It was noted also that close stations located at
distances from epicenter less than 70-90 km often overestimate the moment magnitude of about
0.2 units.
Table 8. Study earthquakes ML3.5+. The events which it was possible to obtain moment tensor
mechanism solutions for are numbered (EV 1-18).
EV
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
Date
(Yr/Mo/D)
2005/10/03
2005/09/07
2005/07/18
2005/06/01
2005/02/07
2004/08/08
2004/07/20
2004/07/09
2004/07/07
2004/05/31
2004/03/15
2004/02/24
2004/02/13
2004/02/11
2003/12/31
2002/02/24
2001/10/08
2000/07/05
1999/12/19
1999/10/28
1999/06/02
1999/04/11
1998/12/15
1998/12/14
1998/05/31
1998/05/24
1998/02/13
1997/05/29
1997/05/18
1997/04/06
1997/03/26
1996/12/03
1996/12/01
1996/10/15
Origin time
(hr:mn:sec)
04:05:29
08:35:44
09:52:51
03:27:28
10:26:59
12:42:30
21:42:50
12:16:28
14:35:08
23:52:38
23:49:56
02:11:32
07:02:36
08:15:03
20:44:41
09:56:01
11:25:52
03:33:50
08:42:49
15:39:15
02:11:52
19:45:05
11:17:00
23:37:56
13:25:28
18:58:59
19:11:07
07:06:27
19:46:56
19:47:14
13:20:21
19:43:02
10:57:36
14:36:40
lat
(°)
32.035
32.181
31.23
31.294
31.157
32.470
32.464
31.69
31.972
32.03
31.367
31.72
31.701
31.701
31.503
32.069
30.47
31.476
29.70
30.400
32.401
33.15
32.777
31.329
30.229
30.221
33.741
33.353
32.776
33.721
33.703
33.702
33.713
30.467
lon
(°)
35.591
35.561
35.381
35.414
35.5
35.257
35.255
35.57
35.554
35.48
35.533
35.49
35.540
35.557
35.513
35.469
35.28
35.581
34.96
34.983
35.406
35.635
35.630
35.543
35.002
35.002
35.809
35.621
35.265
35.58
35.565
35.581
35.547
35.205
h
(km)
15
9
11
11
8
10
10
16
13
2
13
17
16
17
16
2
9
12
17
9
10
4
2
11
3
8
5
8
10
1
3
2
1
9
ML
4.0
3.7
3.5
3.7
4.0
4.0
3.6
3.7
4.7
3.5
4.3
3.5
3.7
5.2
3.7
3.6
4.2
3.5
4.1
4.6
3.7
3.6
3.7
3.6
3.7
3.5
3.7
3.7
3.6
3.7
5.2
4.1
3.9
3.5
MW nst
3.8
3.3
3.2
3.4
3.4
3.7
3.5
3.1
4.4
3.2
3.8
2.9
3.4
5.1
3.5
3.1
3.7
2.9
3.1
3.8
3.6
3.2
3.5
3.3
3.1
3.4
3.3
3.4
3.5
2.9
4.0
3.2
3.3
3
1
5
4
5
4
2
2
4
3
6
3
3
6
6
1
2
1
2
2
2
1
2
1
2
2
1
1
1
2
2
2
1
Region
Jordan Valley
Jordan Valley
Dead Sea
Dead Sea
Dead Sea
Carmel Tirza
Carmel Tirza
Dead Sea
Jordan Valley
E. Shomron
Dead Sea
Dead Sea
Dead Sea
Dead Sea
Dead Sea
E. Shomron
Arava Valley
Dead Sea
Arava Valley
Negev
E. Shomron
Kinneret
Kinneret
Dead Sea
Arava Valley
Arava Valley
Roum
Roum
Galilee
Roum
Roum
Roum
Roum
Arava Valley
Notes
high noise
high noise
high noise
high noise
high noise
high noise
high noise
high noise
high noise
high noise
high noise
high noise
high noise
high noise
high noise
no BB data
To verify the best fitting focal mechanism solutions obtained by the moment tensor
inversion we also studied the P-wave first motion short-period picks recorded by the ISN and
nearby seismic networks (Figure 5) to use them then for the focal mechanism calculation by the
program of Reasenberg and Oppenheimer (1985).
22
Table 9. Moment tensor inversion results and first motion solutions for ML3.5+ earthquakes
1
h
hinv MW
MO
strike (°)
dip (°)
(km) (km)
(dyne cm) NP1/NP2 NP1/NP2
20051003 15 15 3.8 6.38e+21 73 / 164
88 / 67
2
20050907
9
24
3.3
9.75e+20
3
20050601
11
12
3.4
1.19e+21
4
20050207
8
6
3.4
1.68e+21
5
20040808
10
21
3.7
4.12e+21
6
20040720
10
15
30
3.3
3.5
9.10e+20
2.24e+21
7
20040707
13
18
4.4
3.78e+22
8
20040531
2
3
3.2
6.15e+20
9
20040315
13
12
3.8
5.81e+21
10 20040213
16
15
3.4
1.23e+21
11 20040211
17
18
5.1
5.94e+23
12 20031231
16
18
3.5
2.17e+21
13 20011008
9
21
3.7
3.59e+21
EV
YrMoD
60 / 152
80 / 172
77 / 170
338 / 142
355 / 149
278 / 8
275 / 181
337 / 83
335 / 73
151 / 60
331 / 62
340 /250
181 / 86
85 / 60
86 / 68
80 / 75
47 / 44
40 / 52
88 / 86
80 / 70
69 / 54
80 / 50
84 / 80
86 / 75
75 / 90
76 / 73
341 / 250
313 / 189
328 / 170
278 / 8
70 / 85
59 / 48
71 / 20
89 / 78
265 / 355
88 / 293
115 / 295
86 / 343
90 / 80
55 / 38
75 / 15
72 / 54
80 / 344
270 / 179
265 / 173
87 / 264
80 / 60
81 / 81
80 / 80
52 / 38
rake (°)
P (°)
T (°)
% % dc N
bandpass (Hz)
NP1/NP2 az / plng az / plng VR
st
157 / 2 121 / 15 26 / 18 86.3 65 3 0.02-0.10; 0.040.10
150 / 5 110 / 16 12 / 24
15
158 / 4 128 / 12 34 / 18 57.7 69 1 0.04-0.10
164 / 10 124 / 3
33 / 17
17
-79 / -101 320 / 82
60 / 2 71.5 86 4 0.04-0.10
-70 / -106 7 / 75
250 / 6
17
176 / 2
323 / 1
234 / 4 70.4 86 5 0.04-0.10
-160 / -10 139 / 21
46 / 6
18
-39 / -154 295 / 42
33 / 9 64.2 81 4 0.04-0.10
-40 / -167 286 / 34 30 / 18
16
-170 / -6 16 / 11
285 / 3 24.1 94 2 0.04-0.10
-15 / -176 286 / 13
17 / 8 24.7 61 2 0.04-0.10
0 / 165 295 / 10 204 / 10
16
18 / 166 313 / 2
44 / 23 92.1 91 4 0.02-0.05; 0.040.10
5 / 160 297 / 10 204 / 17
26
-128 / -45 168 / 58
69 / 7 30.8 89 3 0.04-0.10
-97 / -70 227 / 63 64 / 25
14
168 / 1
324 / 8
233 / 9 85.0 93 6 0.02-0.10; 0.040.10
170 / 0
310 / 7
219 / 7
11
-105 / -70 314 / 75 189 / 9 55.2 49 3 0.04-0.10
-90 / -90 24 / 60 205 / 30
19
-142 / -22 310 / 39 211 / 12 83.8 59 6 0.01-0.05; 0.020.05
0.04-0.10
-150 / -11 306 / 28 208 / 13
31
-171 / -9 134 / 13 225 / 0 82.7 79 6 0.04-0.10
-170 / -10 129 / 14 219 / 0
-88 / - 93 8 / 83
176 / 7 90.4 63 2 0.04-0.10
faulting stile
strike-slip
strike-slip
normal
strike-slip
oblique-normal
strike-slip
strike-slip
oblique-normal
strike-slip
normal
strike-slip
strike-slip
normal
23
14 19991028
9
12
3.8
5.26e+21
15 19980213
5
9
3.3
1.13e+21
16 19970326
3
9
4.0
1.18e+22
17 19961203
2
9
3.2
6.96e+20
18 19961201
1
9
3.3
1.11e+21
?/?
204 / 101
211 / 85
26 / 290
20 / 284
259 / 350
?/?
260 / 350
?/?
66 / 64
38 / 65
78 / 64
85 / 40
87 / 76
?/?
90 / 74
?/?
?/?
-151 / -27 63 / 37
-136 / -60 37 / 58
27 / 167 156 / 10
50 / 172 141 / 28
166 / 3
305 / 8
?/?
?/?
164 / 0 307 / 11
?/?
332 / 1
153 / 14
251 / 27
255 / 36
214 / 12
?/?
214 / 11
?/?
64 / 334
?/?
?/?
88 / 85
?/?
?/?
-175 / -2
?/?
?/?
199 / 2
?/?
?/?
290 / 5
?/?
84.3 77
2
18
46.4 36 1
8
94.4 90 2
26
72.5 76 2
65.8 88
0.04-0.10
strike-slip
0.04-0.10
strike-slip
0.02-0.05
strike-slip
0.02-0.05; 0.040.10
strike-slip
11
1 0.04-0.10
10
strike-slip
24
Figures A1-A18 in Appendix 2 and Table 9 show cross-correlation results and best-fit
moment tensor solutions obtained for 18 events listed in Table 8. For comparison the first
motions focal mechanisms are also presented here. In most cases these solutions agree to within
20º scattering of strike, dip and rake. It being important, that the moment tensor inversion
method gives as a rule more exact results especially in the cases of insufficient short-period data.
For example for the 2001/10/08 earthquake in Arava Valley (Figure A12) only teleseismic Pwave onsets fitting in the center of the focal sphere could successfully resolute data but due to
small magnitude of this event they did not observed. Another example is when all short-period
stations being one-side located relatively the epicenter fell into the one or two focal quarters (the
Roum earthquakes, Figures A15-A17). Notably that moment tensor solutions for these
mentioned earthquakes were found from data of only one or two broadband stations. Very often
a number of short-period data is too small and insufficient for getting of an exact location of
nodal lines and only the principal solution is possible (Figures A1, A8-A10, A12, A15).
On the other side, it is clear that in the case of a weak earthquake, when broadband data is
noise contaminated and the variance reduction is very low (e. g., Figures A2, A8, A10 and A18),
the additional short-period data may be very useful, especially when inverting waveforms of
only one or two stations. For example, in the case of the Carmel Tizra M W3.5 earthquake
2004/07/20 (Figure A6), we found two best-fit moment tensor solutions (from the broadband
HRFI and KSDI data) with mutually changing P and T axes, both with the equal but low
meaning of the variance reduction VR=24%. The short-period P-wave onset signs distribution on
the focal sphere allowed us here to choose the correct solution.
Discussion
Depth variations
We have shown here through the examples of 18 earthquakes that a source depth can be
resolved with the long-period data. To be more precise, it is the centroid depth, or the depth of
emission of maximum energy generated by the moving during the shock fault. The source depth
or the depth of the first movement in the source may differ strongly from the centroid one in the
case of strong earthquakes. For small and intermediate events like those we have in our study,
both these depths must be close for well constrained moment tensor solutions. But in practice, as
can be seen from the Table 9, they differ sometimes very strongly, up to 15-20 km.
(b)
20
20
15
15
dh, km
dh, km
(a)
10
10
5
5
0
0
3
3.5
4
4.5
Mw
5
5.5
0
1
2
3
4
5
6
Nst
Figure 9. (a) Differences between source depths estimated by seismic short-period networks and centoid
depths estimated from moment tensor inversion, as a function of moment magnitude; (b) the same as a
function of number of broadband stations used for inversion.
25
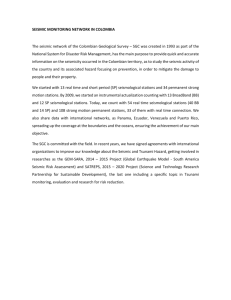
Figure 9 shows the distribution of difference of all depths (dh) estimated in this study from
moment tensor inversion and those given by regional short-period seismic networks, over
moment magnitude (a) and number of broadband stations (Nst) used for inversion (b). The depth
estimates from the seismic networks are assumed to be good because their reliability pointed by
the system in the phase-lists is high or acceptable. The largest outliers of dh (20 and 15 km) are
the EV6 (MW3.5 Carmel Tizra 2004/07/20) and EV2 (MW3.3 Jordan Valley 2005/09/07) which
moment tensors were determined with low (24%) and medium (57%) value of the fit parameter
(variance reduction), respectively.
We can see from this figure the clear and distinct trend of decreasing of the depth
discrepancy with increasing of both, the moment magnitude and number of stations taking part in
inversion. This means that the main reason of a bad resolution of the source depth are the noise
of a signal due to the different kind of background oscillations of the surrounding medium, and
heterogeneities of this medium itself. As a result, this resolution is improving firstly with
increasing of the signal-to-noise ratio in the data which we have with magnitude growth, and
secondly with increasing the number of observations participating in inversion, thereby
minimizing the effect of the model uncertainty along any one single ray path.
MW/ML relationship
The comparison of the reported local magnitude ML measured by the coda duration from the
short-period seismic network ISN data and the moment magnitude MW calculated from the scalar
moment M0 using the equation of Kanamori (1977)
MW
2
lg M 0 10.7 ,
3
(11)
through the estimations made in this work and presented in Table 8 reveals that generally MW is
less than the reported ML, and their estimates differ by at most 1.2 units of magnitude.
The relationship of moment and local magnitude is shown graphically on the Figure 10,a.
For lack of statistics for intermediate-sized earthquakes in Israel and its full absence for large
ones, we can only conclude from this figure that for earthquakes with M L=3.5-4.5 their moment
magnitudes are less than local ones in the average by 0.4 units of magnitude.
This magnitude discrepancy does not show any essential dependence from the number of
broadband stations taking part in inversion (Figure 10,b) but clearly decrease with magnitude
growth (Figure 10,c). The 1.2 unit outlet on the last figure corresponded to the earthquake EV16
MW4.0 located to the north from Israel in Roum (Lebanon) some disturbs this regularity. The
reason of such a big difference is unclear but probably is connected with the one-side location of
stations. This idea is supported by the second 0.8 unit outlet observed for the EV14 M W3.8
earthquake in Negev, id est again on the country and network boundary. In any case, the rest 31
moment estimations confirm the found dependence without any doubts. What is more, it is
follows from Figure 10,c that there is possibly a scaling break at MW~3.5 if to approximate
MW/ML relationship linearly.
Tectonics
The style of faulting corresponding with the obtained moment tensor solutions is listed in
Table 9. From these results it follows that about three quarters of the found solutions yields a
strike-slip mechanism. Another quarter contains normal and oblique-normal events. All the
strike-slip sources except one EV14 MW3.8 located in Negev are left-lateral relatively the near
meridian nodal plane which coincides with the left-lateral character of the inter-plate movement
along the Dead Sea transform. The EV14 is located on the Paran fault stretched sub-latitude, so
most probably, the active nodal plane was the east-west directed with left-lateral faulting. That
26
supplements with the results of Hofstetter et al. (2005). Another mechanism solutions found in
this work are in a good agreement with the tectonic conclusions made in the mentioned paper.
(a)
(b)
5.5
1.4
5
1.2
1
dM
MW
4.5
4
0.8
0.6
3.5
0.4
3
0.2
2.5
0
2.5
3.5
4.5
5.5
2
4
6
8
Nst
ML
(c)
0
1.4
1.2
dM
1
0.8
0.6
0.4
0.2
0
2.5
3.5
4.5
5.5
Mw
Figure 10. (a) MW obtained from this study is plotted against the ML provided to this study (Table 8). The
line corresponds to the case when MW=ML. (b) Difference between local and moment magnitudes as a
function of a number of broadband stations used for inversion. (c) The same magnitude discrepancy as a
function of moment magnitude.
Conclusions
In this study we computed the catalogue of calibrated broad-band Green’s functions
prefiltered in four frequency bands (0.01-0.05 Hz, 0.02-0.05 Hz, 0.02-0.10 Hz and 0.04-0.10
Hz), for the two 1-D models most suitable for the crust in Israel. The last frequency band is
restricted and used for noisy and/or local distance data.
Using these Green’s functions and broadband ISN data, we made moment tensor inversion
for 33 earthquakes with the local magnitude ML greater or equal to 3.5, occurred in Israel and
nearby since December 1996. Due to high noise contamination of data of events with moment
magnitude MW<3.7 it was possible to obtain focal mechanism inverse solutions, depths and
scalar moment M0 for only 18 events. For other 15 ones we estimated only the scalar moment.
It is shown that for sufficiently strong events (since MW=3.7) moment tensor inversion
method gives compatible or even more exact focal mechanisms than those from first motions
especially in the cases of insufficient or badly configured short-period data. For weaker
earthquakes the quality of inversion results depends on the noise level of a data set.
It is demonstrated through the examples of 18 earthquakes that a resolution of the source
depth found by the moment tensor inversion is improving with increasing of the moment
magnitude and number of stations taking part in inversion.
27
It was found also that for earthquakes with ML=3.5-4.5 moment magnitudes are less than
local ones in the average by 0.4 units. This magnitude discrepancy does not show any essential
dependence from the number of broadband stations taking part in inversion but clearly decrease
with magnitude growth, from about 0.8-1.0 magnitude unit at MW=2.9 up to about 0.1 at
MW=4.0-5.1.
The dominated style of faulting corresponding with the obtained moment tensor solutions is
strike-slip (almost three quarters of the whole number of events). Another quarter contains
normal and oblique-normal events. The mechanism solutions found in this work are in a good
agreement with the tectonic conclusions made by Hofstetter et al. (2005).
Acknowledgment
This work was supported by the Earth Sciences Research Administration of the Ministry of
National Infrastructures.
Figures with maps were prepared using Generic Mapping Tools (Wessel and Smith, 1991).
References
Aki, K. and Richards, P.G., 1980. Quantitative Seismology. Theory and Methods, Freeman, San
Francisco, p.932.
Ben-Avraham, Z. and Ginzburg, A. (1990). Displaced terranes and crustal evolution of the
Levant and the eastern Mediterranean, Tectonics, 9, 613-622.
Ben-Avraham, Z., Ginzburg, A., Makris, J. and Eppelbaum, L. (2002). Crustal structure of the
Levant basin, eastern Mediterranean, Tectonophysics, 346, 23-43.
Dreger, D.S., and Helmberger, D.V., 1993. Determination of source parameters at regional
distances with three-component sparse network data, Jour. Geoph. Res., 98, 8107-8125.
Dreger, D.S., and Langston, C., 1995. Distributed by incorporated Research Moment Tensor
Inversion Workshop (an IRIS DMS short Course), December 15-16 1995, IRIS
workshop.
Fan, G., and Wallace, T.C., 1991. The determination of source parameters for small earthquakes
from a single very broadband seismic stations, Geophys. Res. Lett., 18, 1385-1388.
Feigin, G., and Shapira, A., 1994. A unified crustal model for calculating travel times of seismic
waves across the Israel Seismic Network, IPRG Rep., Z1/567/79(107).
Frazer, L.N. and Gettrust, J.F., 1984. On a generalization of Filon’s method and the computation
of the oscillatory integrals of seismology, Geophys. J. R. astron. Soc. 76, 461-481.
Fuchs, K., and Muller, G., 1971. Computation of synthetic seismograms with reflectivity method
and comparison with observations, Geophys. J. R. Astron. Soc., 23, 417-433.
Fukuyama, E., and Dreger, D. (2000). Performance test of an automated moment tensor
determination system for the future “Tokai” earthquake. Earth Planets Space, 52, 383392.
Ginzburg, A. and Folkman, Y., 1980. The crustal structure between the Dead Sea rift and the
Mediterranean Sea, Earth Planet. Sci. Lett., 51, 181-188.
Helmberger, D. V., and Engen, G.Q., 1980. Modeling the long-period body waves from shallow
earthquakes at regional distances, Bull. Seism., Soc. Am., 70, 1699-1714.
28
Hofstetter, A., Feldman, L. and Rotstein, Y., 1990. Crustal structure of Israel: constraints from
teleseismic and gravity data. Geophys. J. Int., 104, 371-379.
Hofstetter, A., Feldman, L. and Rotstein, Y., 1991. Crustal structure of Israel: constraints from
teleseismic and gravity data. Geophys. J. Int., 104, 371-379.
Hofstetter, A., Dorbath, C., Rybakov, M., Goldshmidt, V., 2000. Crustal and upper mantle
structure across the Dead Sea rift and Israel from teleseismic P-wave tomography and
gravity data, Tectonophysics, 327(1-2), 37-59.
Hofstetter, A., Klinger, J., Amrat, A.Q., Rivara, L. and Dorbath, L., in press. Stress tensor and
focal mechanisms along the Dead Sea Fault and related structural elements based on
seismological data.
Hofstetter, A., Thio, H.K. and Shamir, G., 2003. Source mechanism of the 22/11/1995 Gulf of
Aqaba earthquake and its aftershock sequence, Journal of seismology, 7, 99-114.
Kanamori, H., 1977. The Energy Release in Great Earthquakes, J. Geophys. Res. 82, 2981-2988.
Kim, S., G., and Kraeva, N., 1998. Source parameter determination of earthquakes in and near
Korean peninsula using moment tensor inversion, 2-nd International Conference
“Problems of Geocosmos”, St. Petersburg, Russia, 29 June- 3 July 1998 (Theses). St.
Petersburg, 192-193.
Kim, S., G., and Kraeva, N., 1999. Source parameter determination of local earthquakes in Korea
using moment tensor inversion of single station data, Bull. Seism. Soc. Am., 89(4), 10771082.
Kim, S., G., Chen, Y.-T., Kraeva, N.V., 2000. Source parameter determination of regional
earthquakes in the Far East using inversion of single-station data, Tectonophysics, 317,
125-136.
Kind, R., 1979. Extensions of the reflectivity method, J. Geophys, 45, 373-380.
Kraev, N., 2005. Testing of polarities of broadband stations of Israel. GII rep. No. 559/136/05.
Lay, T., and Wallace, T., 1995. Modern Global Seismology. International Geophysics Series.
USA: Academic Press, 58.
Langston, C.A., 1981. Source inversion of seismic waveforms: The Kyona, India, earthquakes of
13 September, Bull. Seismol. Soc. Amer. 71., 1-24.
Makris, J., Ben Abraham, Z., Behle, A., Ginzburg, A., Giese., P., Steinmetz, L., Whitmarsh, R.
and Eleftheriou, S., 1983. Seismic refraction profiles between Cyprys and Israel and their
interpretation. Geophys. J. R. astr. Soc., 75, 575-591.
Mayeda, K., Hofstetter, A., O’Boyle, J. and Walter, W., 2003. Stable and transportable regional
magnitudes based on coda-derived moment-rate spectra, Bull. Seis. Soc. Am., 93, 224239.
Mayeda, K., and W. R. Walter, 1996. Moment, energy, stress drop, and source spectra of western
United States earthquakes from regional coda envelopes, J. Geophys. Res., 101, 1119511208.
Pasyanos, M.E., Dreger, D.S. and Romanovwicz, B., 1996. Foward real-time estimation of
regional moment tensors, Bull. Seis. Soc. Am., 86, 1255-1269.
Patton, H.J., and Zandt, G., 1991. Seismic moment tensors of Western U.S. earthquakes and
implications for the tectonic stress field, J. Geophys. Res., 96, 18,245-18,259.
29
Pinar, A., Kuge, K. and Honkura Y., 2003. Moment tensor inversion of recent small to moderate
sized earthquakes: implications for seismic hazard and active tectonics beneath the Sea of
Marmara, Geophys. J. Int., 153, 133-145.
Reasenberg, P., and Oppenheimer, D., 1985. FPFIT, FPPLOT and FPPAGE: Fortran computer
programs for calculating and displaying earthquake fault-plane solutions, USGS Open
File Rep., 85-739.
S., G., Kim, Kraeva, N.V., Ivashchenko, A.I., 2000. Moment tensor inversion for earthquakes in
Southeast Asia, Physics of the Solid Earth, Izvestiya, Russian Acad. Sci., 36(10), 872882.
Saikia, C.K., 1994. Modified frequency-wavenumber algorithm for regional seismograms using
Filon’s quadrature: modeling of Lg waves in Eastern North America, Geophys. J. Int.,
118, 142-158.
Stein, S., 1987. Introduction to Seismology, Earthquakes, and Earth Structure. Department of
Geological Sciences Northwestern University. Copyright by S. Stein, 521.
Thio, H.K., and Kanamori, H., 1995. Moment-tensor inversions for local earthquakes using
surface waves recorded at TERRAscope, Bull. Seis. Soc. Am., 85, 1021-1038.
Wallace, T. C., and Helmberger, D. V., 1982. Determining source parameters of moderate-size
earthquakes from regional waveforms, Physics of the Earth and Planetary Interiors, 30,
185-196.
Walter, W.R., 1993. Source parameters of the June 29, 1992 Little Skull Mountain earthquake
from complete regional waveforms at a single station, Geophys. Res. Lett., 20, 403-406.
Wells, D. L., and Coppersmith, K. J., 1994. New empirical relationships among magnitude,
rupture length, rupture width, rupture area, and surface displacement, Bull. Seismol. Soc.
Am., 84, 974-1002.
Wessel, P., and Smith, W.H.F. (1991). Free software helps map and display data. EOS. 445-446.
Appendix 1.
Code of the script “data-prep”
#! /bin/csh
# Shell to prepare data for TDMT_INV input
set path=($path .../TDMTinv/PROGRAMS)
# Command line arguments reading (station name, name of channel, the latitude
# and longitude of the event, and the highpass and lowpass filter parameters)
set NAME=$1
set CHNL=$2
set LA=$3
set LO=$4
set F1=$5
set F2=$6
# dt – the final step of discretization in sec, npts – number of points in
input
# data rows
set dt =1.0
set npts=200
# Setting of sensitivities
30
if ( $NAME == 'EIL' ) then
set sew = 5.9354e+08
set sns = 5.9435e+08
set sz = 6.0614e+08
else
set sew = 6.0207e+08
set sns = 6.2793e+08
set sz = 6.1734e+08
endif
# Setting of overestimated stations coordinates and coefficients to convert
data
# to cm and correct polarities
if ( $NAME == 'EIL' ) then
set STLA = 29.6712
set STLO = 34.9520
set polar = 100
endif
if ( $NAME == 'JER' ) then
set STLA = 31.7724
set STLO = 35.1981
set polar = 100
endif
if ( $NAME == 'CSS' ) then
set STLA = 34.9620
set STLO = 33.3310
set polar = 100
endif
if ( $NAME == 'MRNI' ) then
set STLA = 33.0118
set STLO = 35.9321
set polar = 100
endif
if ( $NAME == 'KSDI' ) then
set STLA = 33.1920
set STLO = 35.6585
set polar = -100
endif
if ( $NAME == 'AMZI' ) then
set STLA = 31.5491
set STLO = 34.9123
set polar = -100
endif
if ( $NAME == 'HRFI' ) then
set STLA = 30.0364
set STLO = 35.0370
set polar = -100
endif
if ( $NAME == 'MMLI' ) then
set STLA = 32.4379
set STLO = 35.4216
set polar = -100
endif
if ( $NAME == 'KZIT' ) then
set STLA = 30.9067
set STLO = 34.3978
set polar = -100
endif
if ( $NAME == 'BGIO' ) then
set STLA = 31.7219
set STLO = 35.0877
set polar = 100
31
endif
sac << eof
# Reading input data in the SAC format
r $NAME*.${CHNL}E.* $NAME*.${CHNL}N.* $NAME*.${CHNL}Z.*
# Synchronize and remove the mean meaning
synch
rmean
# Remove seismometer STS-2 response and filter data
trans from polezero s sts-2.zp freq 0.001 0.005 5 10
# Polarity and sensitivity correction, convert data to cm/s
mul $polar
div $sew $sns $sz
w ew ns z
# Data headers correction
setbb la $LA
getbb la
setbb lo $LO
getbb lo
setbb stla $STLA
getbb stla
setbb stlo $STLO
getbb stlo
r ew ns z
ch lpspol false
ch file 1 cmpaz 9.00e+01
ch file 2 3 cmpaz 0.00e+00
ch file 3 cmpinc 0.00e+00
ch file 1 2 cmpinc 9.00e+01
ch knetwk IL
ch stla %stla stlo %stlo
ch evla %la evlo %lo
ch iztype IA
setbb NM and,kstnm
getbb NM
setbb N0 and,npts
getbb N0
setbb d0 and,delta
getbb d0
setbb DIS and,dist
getbb DIS
setbb BAZ and,baz
getbb BAZ
setbb AZ and,az
getbb AZ
# Note of the azimuth and distance in the file “azim.dat”
getbb to azim.dat names off newline off NM DIS AZ
qdp off
ylim off
# Point P-wave arrival manually
ppk m on
wh
# Integration of data
rmean
int
# Bandpass filtration
bp co $F1 $F2 p 2
w over
# Cut signal from the input rows, npts sec in length
cut on
cut a -50 149
r ew ns z
32
rmean
taper w 0.1
w over
cut off
# The horizon data rotation to the epicenter
r ew ns
rot
w r t
r r t z
ylim all
ppk
q
eof
# Decimation to dt= 1 sec
if ( $CHNL == 'SH' ) then
sac << eof
r r t z
dec 5 f on
dec 4 f on
dec 2 f on
w r t z
setbb N and,npts
getbb N
setbb d and,delta
getbb d
q
eof
endif
if ( $CHNL == 'BH' ) then
sac << eof
r r t z
dec 5 f on
dec 4 f on
w r t z
setbb N and,npts
getbb N
setbb d and,delta
getbb d
q
eof
endif
# The final data file preparation
SAC2BIN in=t out=tan
SAC2BIN in=r out=rad
SAC2BIN in=z out=ver
cat tan rad ver > tmp
MAKEASCII ntr=3 format="(6e12.5)" dt=$dt nt=$npts < tmp > {$NAME}.data
\rm ew ns tmp tan rad ver z t r
File sts-2.zp:
CONSTANT 6.0077e+07
ZEROS 2
POLES 5
-3.7004e-02 -3.70016e-02
-3.7004e-02
3.70016e-02
-251.33
0.0
-131.04
-467.29
-131.04
467.29
33
Appendix 2
Figure A1. (a) Cross-correlation results and best-fit moment tensor solutions of the 2005/10/03 Jordan
Valley ML=4.0 earthquake (EV1 in Tables 8-9). The solid line corresponds to observed waveforms and
the dotted one to synthetics. (b) The first motion solution for this earthquake obtained from short-period
regional data. Compression (up) first motions are pointed by circles and dilatation (down) by triangles.
Red-colored signs correspond to the direct waves. On the small focal sphere on the right the P
(compressive) and T (tension) axes possible location areas are shown.
34
Appendix 2
Figure A2. (a-b) The same as in Figure A1 but for the 2005/09/07 Jordan Valley ML=3.7 earthquake (EV2
in Tables 8-9).
35
Appendix 2
Figure A3. (a-b) The same as in Figure A1 but for the 2005/06/01 Dead Sea ML=3.7 earthquake (EV3 in
Tables 8-9).
36
Appendix 2
Figure A4. (a-b) The same as in Figure A1 but for the 2005/02/07 Dead Sea ML=4.0 earthquake (EV4 in
Tables 8-9).
37
Appendix 2
Figure A5. (a-b) The same as in Figure A1 but for the 2004/08/08 Carmel Tirza ML=4.0 earthquake (EV5
in Tables 8-9).
38
Appendix 2
Figure A6. (a-b) Cross-correlation results and two opposite moment tensor solutions found for the
2004/07/20 Carmel Tirza ML=3.6 earthquake (EV6 in Tables 8-9). Due too small magnitude, the
broadband data is noise contaminated and the variance reduction is very low in both cases. The shortperiod P-wave onset signs distribution on the focal sphere and corresponded to it the fault solution (c)
allows us to choose the correct moment tensor solution (b).
39
Appendix 2
Figure A7. (a-b) The same as in Figure A1 but for the 2004/07/07 Jordan Valley ML=4.7 earthquake (EV7
in Tables 8-9).
40
Appendix 2
Figure A8. (a-b) The same as in Figure A1 but for the 2004/05/31 E.Shomron ML=3.5 earthquake (EV8 in
Tables 8-9).
41
Appendix 2
Figure A9. (a-b) The same as in Figure A1 but for the 2004/03/15 Dead Sea ML=4.3 earthquake (EV9 in
Tables 8-9).
42
Appendix 2
Figure A10. (a-b) The same as in Figure A1 but for the 2004/02/13 Dead Sea ML=3.7 earthquake (EV10
in Tables 8-9).
43
Appendix 2
Figure A11. (a-b) The same as in Figure A1 but for the 2003/02/31 Dead Sea ML=3.7 earthquake (EV12
in Tables 8-9).
44
Appendix 2
Figure A12. (a-b) The same as in Figure A1 but for the 2001/10/08 Arava Valley ML=4.2 earthquake
(EV13 in Tables 8-9). Note that the first motion solution for this earthquake is mistaken. Only teleseismic
P-wave onsets fitting in the center of the focal sphere could successfully resolute short-period polarization
data but due to small magnitude of this event they were not observed.
45
Appendix 2
Figure A13. (a-b) The same as in Figure A1 but for the 1999/10/28 Negev ML=4.6 earthquake (EV14 in
Tables 8-9).
46
Appendix 2
Figure A14. (a-b) The same as in Figure A1 but for the 1998/02/13 Roum ML=3.7 earthquake (EV15 in
Tables 8-9).
47
Appendix 2
Figure A15. (a) The same as in Figure A1,a but for the 1997/03/26 Roum ML=5.2 earthquake (EV16 in
Tables 8-9). (b) The short-period P-wave onset signs distribution on the focal sphere. Note that in this
case it is impossible to construct any confident fault solution because all short-period stations being oneside located relatively the epicenter fell into the two focal quarters.
48
Appendix 2
Figure A16. (a) The same as in Figure A1 but for the 1996/12/03 Roum ML=4.1 earthquake (EV17 in
Tables 8-9). (b) The same as in Figure A15 but all stations fell into the one focal quarter.
49
Appendix 2
Figure A17. (a-b) The same as in Figure A16 but for the 1996/12/01 Roum ML=3.9 earthquake (EV18 in
Tables 8-9).
50