Locating Faulty Rolling Element Bearing Signal by Simulated
advertisement

Locating Faulty Rolling Element Bearing
Signal by Simulated Annealing
Mid Year Report
AMSC 663, 2012
Jing Tian
Course Advisor: Professor Radu Balan, Professor Kayo Ide
Research Advisor: Dr. Carlos Morillo
University of Maryland, College Park
Abstract
Vibration acceleration signal is widely used in the health monitoring of rolling element
bearings. A critical work of the bearing fault diagnosis is locating the optimum frequency band
that contains faulty bearing signal, which is usually masked by noise. This project diagnoses the
bearing fault with a combination of methods. The optimum frequency band is located by
maximizing spectral kurtosis with simulated annealing. Then the fault feature frequency
component is extracted from the frequency band by using envelope analysis. Modules of the
program were validated by a combination of analytic work and simulation work. The whole
program will be validated by an open database of both normal and faulty bearing vibration
signals.
I.
Introduction
Bearing provides relative rotational freedom and transmits a load between two structures. It
is widely used in electromechanical systems.
Rolling element bearing is a major source of failure in electromechanical systems. For
example, bearing faults account for more than 40% of the induction motor’s failure [1], and
gearbox bearing failure is the top contributor of the wind turbines downtime [2, 3]. Bearings are
inexpensive devices, but the failure of bearing is costly. A $5,000 wind turbine bearing
replacement can easily turn into a $250,000 project, not to mention the cost of downtime [4]. In
1987, LOT Polish Airlines Flight 5055 Il-62M crashed because of failed bearings in one engine,
killing all the183 people on the plane [5]. In-situ health monitoring is used to improve the
condition-based maintenance, which reduces the frequency and the loss of the bearing failure.
In the bearing health monitoring, early detection of the bearing fault is a major concern for
the industry. Vibration acceleration signal is widely used in this purpose because it is sensitive to
the bearing fault and it can be monitored in-situ.
The objective of the vibration signal bearing fault detection is to test if the vibration signal x(t)
contains the faulty bearing signal s(t)
Faulty bearing:
x(t) = s(t) + ν(t)
x(t) = ν(t)
Normal bearing:
where x(t) is the monitored vibration signal; s(t) is the faulty bearing signal; v(t) is the noise,
which is unknown.
An industrial practice to test the existence of s(t) is to test if a unique frequency component
of s(t)- the fault feature frequency component can be extracted from x(t) or not. If the fault
feature frequency component is extracted, the hypothesis that the bearing is faulty is true,
otherwise the hypothesis is false.
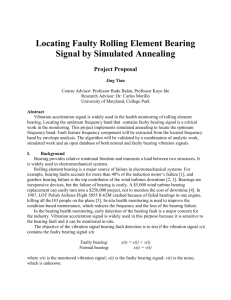
According to the research in [6], faulty bearing signal s(t) is a modulated signal
s(t) = d(t)c(t)
where d(t) is the modulating signal. It is a result of the periodic impact between the bearing’s
rolling elements and the fault on the bearing’s contact surface. Its frequency component is the
fault feature frequency, which is illustrated in a simulated faulty bearing signal in Fig.1. The
frequency is provided by the bearing manufacturer; c(t) is the carrier signal, which is a result of
the loading and vibration transfer function. This signal is usually unknown.
Amplitude
1
1/fFault
0.5
0
-0.5
0
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
0.09
0.1
Time(s)
Fig. 1, Faulty bearing signal s(t)
fFault is the fault feature frequency
-4
Amplitude
4
x 10
2
Methods like envelope analysis have been developed to extract the fault feature frequency.
The problem is that in the presence
of noise the extraction may fail. The solution is to band-pass
0
2000
4000
6000
10000
14000
filter the vibration signal in the0 frequency
domain,
as 8000
shown
in a 12000
simulated
vibration signal in
Frequency
(Hz)
Fig. 2.
Amplitude
0.01
Faulty bearing
signal
0.005
0
0
500
1000
1500
2000
2500
Frequency(Hz)
Fig. 2, Vibration signal in the frequency domain
The challenge to design the filter is that the optimum frequency band to band-pass filter the
faulty bearing signal is usually unknown. This project provides a solution to find the optimum
frequency band.
II.
Methodology
This project locates the optimum frequency band by optimizing the band-pass filter with
simulated annealing (SA).
The idea is, the frequency band dominated by the faulty bearing signal is non-Gaussian, and
therefore it has a high spectral kurtosis value [7]. In the presence of white Gaussian noise, by
maximizing the SK, the optimum frequency band for the faulty bearing signal can be found. The
optimization problem is to maximize SK in terms of the central frequency, bandwidth, and the
order of the finite impulse response (FIR) band-pass filter.
Maximize
SK ( f c , f , M )
Subject to
f Fault f
f s f
f f
;
fc s
2 2
2
where fc is the frequency band’s central frequency; Δf is the width of the band; M is the order of
FIR filter; fFaul is the fault feature frequency; fs is the sampling rate.
When the optimum frequency band is obtained, envelope analysis is applied to the filtered
signal to extract the bearing faulty feature frequency.
Fig. 3 shows the flow chart of the algorithm.
SA
Maximize SK by fc, Δf, M
x(n)
FIR filter
hi (fci, Δfi, Mi)
x(n)
yi(n)
SK
Optimized yo(n)
FIR filter
h(fco, Δfo, Mo)
Maximized SK
SKo
SKi
a(n)
EA
A(f)
FFT
Magnitude
|A(f)|
x(n) is the sampled vibration signal;
yi(n) is filtered output of the ith FIR filter hi;
SKi is the SK of the yi(n);
yo(n) is the output of the optimized FIR filter;
a(n) is the envelope of yo(n) ;
A(f) is the FFT of a(n)
The bearing
is normal
No
f=fFault?
Yes
The bearing
is faulty
Fig. 3, Flow chart of the algorithm
III.
Implementation and Validation
(1) Filter-bank
x(n) is the sampled version of the vibration signal x(t). It has N points. At first, the vibration
signal x(n) is band-pass filtered by a FIR filter h to produce the filtered signal y(n):
y ( n) x ( n) h
h hd (n) w(n)
hd(n) is the impulse response of the filter
f f / 2
f f / 2
sin[( n M / 2) c
] sin[( n M / 2) c
]
fs / 2
fs / 2
hd (n)
(n M / 2)
w(n) is the window function. In this project, Hamming window will be used:
n
),0 n M
M
This algorithm is implemented by Matlab’s build-in function “fir1”.
Before optimizing the filter, initial input is obtained by calculating SK for the signal filtered
by an FIR filter-bank. The filter-bank has a structure of binary tree as shown in Fig. 4. Sk,j
denotes the jth filter at the kth level. When the signal is processed by the filter-bank, sub-signals
corresponding to the filters are obtained.
w(n) 0.54 0.46 cos( 2
S0,1
Level 0
S1,1
Level 1
S2,1
Level 2
Level 3
S3,1
S1,2
S2,2
S3,2
S3,3
S2,3
S3,4
S2,4
S3,5 S3,6 S3,7
S3,8
…
…
…
Level k
…
Sk,j
…
…
0
Frequency
f s /2
Fig. 4 Structure of the FIR filter-bank
To validate the program, a test signal having four frequency components is used. The
sampling rate is 1024Hz, and 10240 data points are used. The signal is shown in Fig. 5.
x 10 cos( 2 2t ) 8 cos( 2 200t / 4) 6 cos( 2 384t / 2) 4 cos( 2 510t / 3)
Fig. 5. Test Signal (Left: time domain; right: frequency domain; dotted red line: edge of a
frequency band)
A two-level filter-bank is used, which has 4 filters. For sampling rate = 1024Hz, the filters
are [0, 128]Hz, [128, 256]Hz, [256,384]Hz, [384, 512]Hz.
Frequency components are observed in the frequency bands. Results in the frequency domain
are illustrated in Fig. 6. All the frequency components locate on the right place of the frequency
axis. But the magnitude was changed.
Fig. 6. Frequency components obtained by applying the filter-bank (Above left: pass-filtered
in [0, 128]Hz; above right: pass-filtered in [128, 256]Hz; below left: pass-filtered in [256,
384]Hz; below right: pass-filtered in [384, 512]Hz)
Response of the magnitude is obtained by calculating the magnitude of the Fourier transform
of the filters’ coefficients, as illustrated in Fig. 7. We can observe that the magnitude response at
384Hz is smaller than one. That explains why the 384Hz frequency component has smaller
magnitude than its real value.
Fig. 7. Magnitude response of the filter-bank
(2) Spectral Kurtosis
Then the spectral kurtosis of the filtered signal y(n) is calculated. Spectral kurtosis is defined
as follows:
4 {Y (m), Y * (m), Y (m), Y * (m)}
SK
[ 2 {Y (m), Y * (m)}] 2
where κr is the rth order cumulant. Y(m) is the DFT of the signal y(n):
N 1
Y (m) y(n)e
i 2m
n
N
, m 0,1,..., N 1
n 0
Both y(n) and Y(m) are N points sequences. SK is a real number.
To estimate SK, the formula for joint cumulant is used:
SK E[Y (m)Y * (m)Y (m)Y * (m)] E[Y (m)Y (m)]
E[Y * (m)Y * (m)] 2 E[Y (m)Y * (m)]
According to [8], DFT of a stationary signal is a circular complex random variable, and
E[Y(m)2]=0, E[Y* (m)2]=0. Therefore, we have
E{| Y (m) |4 } 2[ E{| Y (m) |2 }]2
E{| Y (m) |4 }
SK
2
[ E{| Y (m) |2 }]2
[ E{| Y (m) |2 }]2
Program of SK is validated by a white Gaussian noise and a cosine function, which are
plotted in Fig. 8. The sampling rate is fs=1024Hz, and the number of the data points is N=1024.
Fig. 8. White Gaussian noise(Above left: time domain; above right: frequency domain), and
cosine function (Below left: time domain; below right: frequency domain)
If we investigate two signals analytically, we can get the following results. Fourier transform
of the white Gaussian noise also follows Gaussian distribution, and therefore its spectral kurtosis
is 0. For a cosine function y=cos(2πft),f=20, its Fourier transform is
1
Y (m) [ (m f ) (m f )]
2
where δ(m) is the delta function. When m=f and m=-f, |Y(m)|=1/2, otherwise |Y(m)|=0.
SK of the cosine function is estimated with a given number of data points N=1024 as follows:
N
SK
E{| Y (m) | 4 }
2
[ E{| Y (m) | 2 }]2
( | Yk (m) | 4 ) / N
k 1
N
[( | Yk (m) | 2 ) / N ] 2
2
(0.5 4 0.5 4 ) / N
2 510
[(0.5 2 0.5 2 ) 2 / N 2
k 1
The numerical result is obtained as follows: SK for the white noise is -0.0406; SK for the
cosine function is 510.0000. Both values match the analytical results.
(3) Simulated annealing
The process of estimating SK as a function of the FIR filter is optimized by simulated
annealing (SA) [9], which is a metaheuristic global optimization tool. The flowchart of
implementing is illustrated in Fig. 6. In reach iteration, there is a chance that a worse case would
be accepted and thus simulated annealing can avoid the searching being trapped in a local
extremum.
The algorithm is validated by a one dimension function and a three dimension function.
The one dimension function tested the algorithm’s ability to locate the global optimum when the
function has many local extremum. The function is plotted in Fig. 9. The global minimum is y=100 when x=π.
y 100 cos( x) ( x ) 2
200
y
100
0
-100
-10
0
10
20
x
Fig. 9. One dimension function
Setting of the simulated annealing is illustrated in Fig.10. Initial temperature T=1000.
Every time when a new result is accepted, T is reduced as T=0.99T. The initial input is a random
number between [-10, 10]. In every iteration a step is added to the input. The step is a random
number, the step size is reduced as S=0.9999S when T drops. The algorithm stops at 1,000
iterations.
T = 1000
Initialize the temperature T
Use the initial input vector W
W: A random number in [-10,10]
Compute function value SK(W)
S: A random number in [-10,10]
Generate a step S
Keep x unchanged, reduce T
T = 0.99T
Compute function value SK(W+S)
No
SK(W+S) <
SK(W)
Yes
Replace W with W+S, reduce T
Termination
criteria reached?
No
exp[(SK(W) SK(W+S) )/T] >
rand ?
Yes
T = 0.99T
1,000 iterations
Yes
End a round of searching
Fig. 10, Setting of the simulated annealing for one dimension function
The minimum found was y= -99.9997. The corresponding minimizer is x= 3.1440. The
searching process is illustrated in Fig. 11.
Fig. 11. Searching process (Left: variable; right: function value)
The algorithm was further validated by a three dimension function. This function can be
regarded as the addition of three functions (Fig. 12). Global minimum is achieved when all the
three functions’ global minimum are reached. The global minimum is y=-150, when x1= π, x2=15,
and x3=- 4π.
y 100 cos( x1 ) ( x1 ) 2 ( x2 15) 2 50 sin( x3 4 ) /( x3 4 )
200
y
100
0
-100
-20
-10
0
10
20
x
30
y ( x2 15) 2
y 50 sin( x3 4 ) /( x3 4 )
y 100cos(x1 ) ( x1 ) 2
Fig. 12. Three dimension function
Fig.13. describes the setting of the algorithm. Initial temperature T=1000. Every time when a
new result is accepted, T is reduced as T=0.99T. The initial input is a three-element vector. Each
element is a random number between [-10, 10]. In every iteration a step vector is added to the
input. Elements of the step vector are random numbers. Amplitude of the vector is reduced as
S=0.9999S when T drops. The algorithm stops at 100,000 iterations.
T = 1000
Initialize the temperature T
W: A vector, each element is a
number in [-10,10]
S: A vector, each element is a
number in [-10,10]
Use the initial input vector W
Compute function value SK(W)
Generate a random step S
Keep x unchanged, reduce T
T = 0.99T
Compute function value SK(W+S)
No
SK(W+S) <
SK(W)
Yes
Replace W with W+S, reduce T
Termination
criteria reached?
No
exp[(SK(W) SK(W+S) )/T] >
rand ?
Yes
T = 0.99T
100,000 iterations
Yes
End a round of searching
Fig. 13. Setting of the simulated annealing for three dimension function
The minimum found was y=-149.7608. The corresponding minimizer is x=[3.1796,
14.8088, -12.6060]. The searching process is illustrated in Fig. 14.
Fig. 14. Searching process (Left: variable; right: function value)
(4) Envelope analysis
When the optimized frequency band is found, envelope analysis is applied to the filtered
signal. The enveloped signal is obtained from the magnitude of the analytic signal which is
constructed via Hilbert transform:
yˆ o (t ) y o ( )h(t )d
h(t )
1
t
Analytic signal
ya (t ) yo (t ) jyˆ o (t )
The envelope is the magnitude of the analytic signal
a(t ) | ya (t ) |
Amplitude
Fig. 15 shows the effect of envelope analysis on a modulated signal
Enveloped signal
0.5
Original signal
0
-0.5
0.032
0.033
0.034
0.035
0.036
0.037
Hilbert transform of
the original signal
0.038
Time(s)
Fig. 15, Effect of envelope analysis
The program is validated by a modulated signal in Fig. 16:
y ( x1 1) x2
where
x1 cos(2 10t )
x2 100 cos(2 200 t / 4)
Fig. 16. Modulated signal (Left: time domain; right: frequency domain)
Frequency component of the modulating signal is expected to be extracted after the envelope
analysis and Fourier transform.
After envelope analysis, de-modulated signal is obtained (Fig. 17). The de-modulated signal
has the same frequency as the modulating signal, and the same amplitude as the original
modulated signal.
Fig. 17. De-modulated signal (Left: time domain; right: frequency domain)
IV.
Summary
All the modules of the program achieved their designated function. Some topics can be
investigated to improve the method. Firstly, the reduced magnitude after filtering needs to be
compensated; secondly, the performance of the envelope analysis module in case of noise has
not been examined.
In 2013 term, all the modules will be assembled to achieve the task of bearing fault detection.
And parallel computing will be implemented to improve the program.
2012
• October
- Literature review; exact validation methods; code writing
• November
- Middle: code writing
- End: Validation for envelope analysis and spectral kurtosis
• December
- Semester project report and presentation
2013
• February
- Complete validation
• March
- Adapt the code for parallel computing
• April
- Validate the parallel version
• May
- Final report and presentation
References
[1] L. M. Popa, B.-B. Jensen, E. Ritchie, and I. Boldea, “Condition monitoring of wind
generators,” in Proc. IAS Annu. Meeting, vol. 3, 2003, pp. 1839-1846.
[2] Wind Stats Newsletter, 2003–2009, vol. 16, no. 1 to vol. 22, no. 4, Haymarket Business
Media, London, UK
[3] H. Link; W. LaCava, J. van Dam, B. McNiff, S. Sheng, R. Wallen, M. McDade, S. Lambert,
S. Butterfield, and F. Oyague,“Gearbox Reliability Collaborative Project Report: Findings from
Phase 1 and Phase 2 Testing", NREL Report No. TP-5000-51885, 2011
[4] C. Hatch, “Improved wind turbine condition monitoring using acceleration enveloping,”
Orbit, pp. 58-61, 2004.
[5] Plane crash information
http://www.planecrashinfo.com/1987/1987-26.htm
[6] P. D. Mcfadden, and J. D. Smith, “Model for the vibration produced by a single
point defect in a rolling element bearing,” Journal of Sound and Vibration, vol. 96,
pp. 69-82, 1984.
[7] J. Antoni, “The spectral kurtosis: a useful tool for characterising non-stationary signals”,
Mechanical Systems and Signal Processing, 20, pp.282-307, 2006
[8] P. O. Amblard, M. Gaeta, J. L. Lacoume, “Statistics for complex variables and signals - Part I:
Variables”, Signal Processing 53, pp. 1-13, 1996
[9] S. Kirkpatrick, C. D. Gelatt, and M. P. Vecchi, "Optimization by Simulated Annealing".
Science 220 (4598), pp. 671–680, 1983