Project Proposal - University of Maryland
advertisement

Locating Faulty Rolling Element Bearing
Signal by Simulated Annealing
Project Proposal
Jing Tian
Course Advisor: Professor Radu Balan, Professor Kayo Ide
Research Advisor: Dr. Carlos Morillo
University of Maryland, College Park
Abstract
Vibration acceleration signal is widely used in the health monitoring of rolling element
bearing, Locating the optimum frequency band that contains faulty bearing signal is a critical
work in the monitoring. This project implements simulated annealing to locate the optimum
frequency band. Fault feature frequency component will be extracted from the located frequency
band by envelope analysis. The algorithm will be validated by a combination of analytic work,
simulated work and an open database of both normal and faulty bearing vibration signals.
I.
Background
Bearing provides relative rotational freedom and transmits a load between two structures. It
is widely used in electromechanical systems.
Rolling element bearing is a major source of failure in electromechanical systems. For
example, bearing faults account for more than 40% of the induction motor’s failure [1], and
gearbox bearing failure is the top contributor of the wind turbines downtime [2, 3]. Bearings are
inexpensive devices, but the failure of bearing is costly. A $5,000 wind turbine bearing
replacement can easily turn into a $250,000 project, not to mention the cost of downtime [4]. In
1987, LOT Polish Airlines Flight 5055 Il-62M crashed because of failed bearings in one engine,
killing all the183 people on the plane [5]. In-situ health monitoring is used to improve the
condition-based maintenance, which reduces the frequency and the loss of the bearing failure.
In the bearing health monitoring, early detection of the bearing fault is a major concern for
the industry. Vibration acceleration signal is widely used in this purpose because it is sensitive to
the bearing fault and it can be monitored in-situ.
The objective of the vibration signal bearing fault detection is to test if the vibration signal x(t)
contains the faulty bearing signal s(t)
Faulty bearing:
Normal bearing:
x(t) = s(t) + ν(t)
x(t) = ν(t)
where x(t) is the monitored vibration signal; s(t) is the faulty bearing signal; v(t) is the noise,
which is unknown.
An industrial practice to test the existence of s(t) is to test if a unique frequency component
of s(t)- the fault feature frequency component can be extracted from x(t) or not. If the fault
feature frequency component is extracted, the hypothesis that the bearing is faulty is true,
otherwise the hypothesis is false.
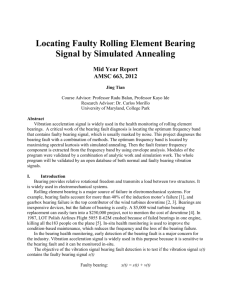
According to the research in [6], faulty bearing signal s(t) is a modulated signal
s(t) = d(t)c(t)
where d(t) is the modulating signal. It is a result of the periodic impact between the bearing’s
rolling elements and the fault on the bearing’s contact surface. Its frequency component is the
fault feature frequency, which is illustrated in a simulated faulty bearing signal in Fig.1. The
frequency is provided by the bearing manufacturer; c(t) is the carrier signal, which is a result of
the loading and vibration transfer function. This signal is usually unknown.
Amplitude
1
1/fFault
0.5
0
-0.5
0
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
0.09
0.1
Time(s)
Fig. 1, Faulty bearing signal s(t)
fFault is the fault feature frequency
-4
Amplitude
4
x 10
2
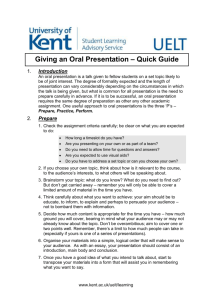
Methods like envelope analysis have been developed to extract the fault feature frequency.
The problem is that in the presence
of noise the extraction may fail. The solution is to band-pass
0
2000
4000
6000
10000
14000
filter the vibration signal in the0 frequency
domain,
as 8000
shown
in a 12000
simulated
vibration signal in
Frequency
(Hz)
Fig. 2.
Amplitude
0.01
Faulty bearing
signal
0.005
0
0
500
1000
1500
2000
2500
Frequency(Hz)
Fig. 2, Vibration signal in the frequency domain
The challenge to design the filter is that the optimum frequency band to band-pass filter the
faulty bearing signal is usually unknown. This project provides a solution to find the optimum
frequency band.
II.
Approach
This project finds the optimum frequency band by optimizing the band-pass filter with
simulated annealing (SA).
The idea is, the frequency band for the faulty bearing signal is non-Gaussian, and therefore it
has larger spectral kurtosis value [7]. By maximizing the SK, the optimum frequency band for
the faulty bearing signal is found. The optimization problem is to maximize SK in terms of the
central frequency, bandwidth, and the order of the finite impulse response (FIR) band-pass filter.
Maximize
SK ( f c , f , M )
Subject to
f Fault f
f s f
f f
;
fc s
2 2
2
where fc is the frequency band’s central frequency; Δf is the width of the band; M is the order of
FIR filter; fFaul is the fault feature frequency; fs is the sampling rate.
When the optimum frequency band is obtained, envelope analysis is applied to the filtered
signal to extract the bearing faulty feature frequency.
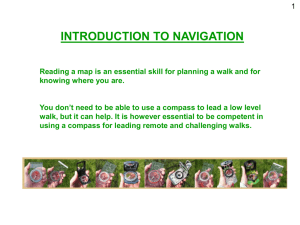
Fig. 3 shows the flow chart of the algorithm.
SA
Maximize SK by fc, Δf, M
x(n)
FIR filter
hi (fci, Δfi, Mi)
x(n)
yi(n)
SK
Optimized yo(n)
FIR filter
h(fco, Δfo, Mo)
Maximized SK
SKo
SKi
a(n)
EA
A(f)
FFT
Magnitude
|A(f)|
x(n) is the sampled vibration signal;
yi(n) is filtered output of the ith FIR filter hi;
SKi is the SK of the yi(n);
yo(n) is the output of the optimized FIR filter;
a(n) is the envelope of yo(n) ;
A(f) is the FFT of a(n)
The bearing
is normal
No
f=fFault?
Yes
The bearing
is faulty
Fig. 3, Flow chart of the algorithm
(1) FIR filter
x(n) is the sampled version of the vibration signal x(t). It has N points. At first, the vibration
signal x(n) is band-pass filtered by a FIR filter h to produce the filtered signal y(n):
y ( n) x ( n) h
h hd (n) w(n)
hd(n) is the impulse response of the filter
sin[( n M / 2)
hd (n)
f c f / 2
f f / 2
] sin[( n M / 2) c
]
fs / 2
fs / 2
(n M / 2)
w(n) is the window function. In this project, Hamming window will be used:
w(n) 0.54 0.46 cos( 2
n
),0 n M
M
(2) SK
Then the spectral kurtosis of the filtered signal y(n) is calculated. Spectral kurtosis is defined
as follows:
SK
4 {Y (m), Y * (m), Y (m), Y * (m)}
[ 2 {Y (m), Y * (m)}] 2
where κr is the rth order cumulant. Y(m) is the DFT of the signal y(n):
N 1
Y (m) y(n)e
i 2m
n
N
, m 0,1,..., N 1
n 0
Both y(n) and Y(m) are N points sequences. SK is a real number.
To estimate SK, the formula for joint cumulant is used:
SK E[Y (m)Y * (m)Y (m)Y * (m)] E[Y (m)Y (m)]
E[Y * (m)Y * (m)] 2 E[Y (m)Y * (m)]
According to [8], DFT of a stationary signal is a circular complex random variable, and
E[Y(m)2]=0, E[Y* (m)2]=0. Therefore, we have
E{| Y (m) |4 } 2[ E{| Y (m) |2 }]2
E{| Y (m) |4 }
SK
2
[ E{| Y (m) |2 }]2
[ E{| Y (m) |2 }]2
Put together, the fc, Δf, M become variables of SK in the following route as illustrated in Fig
4:
E{| Y (m) |4 }
SK
2
[ E{| Y (m) |2 }]2
N 1
Y (m) y(n)e
SK
i 2m
n
N
DFT
, m 0,1,..., N 1
n 0
y ( n) x ( n) h
h hd (n) w(n)
Filter
w(n) 0.54 0.46 cos( 2
sin[( n M / 2)
hd (n)
n
),0 n M
M
f c f / 2
f f / 2
] sin[( n M / 2) c
]
fs / 2
fs / 2
(n M / 2)
Fig. 4, Transmission of the variables
(3) Initial input for optimization
Before optimizing the filter, initial input is obtained by calculating SK for the signal filtered
by an FIR filter-bank.
The filter-bank has a structure of binary tree as shown in Fig. 5. At each level of the structure,
the signal Sk,j is low pass filtered and high pass filtered to generate Sk+1,2j-1 and Sk+1,2j.
Frequency bands are ranked according to their SK value from large to small. Top h frequency
bands are selected as the initial input.
S0,1
Level 0
S1,1
Level 1
S2,1
Level 2
Level 3
S3,1
S1,2
S2,2
S3,2
S3,3
S2,3
S3,4
S2,4
S3,5 S3,6 S3,7
S3,8
…
…
…
Level k
…
Sk,j
…
…
0
Frequency
f s /2
Fig. 5 Structure of the FIR filter-bank
(4) Simulated annealing
The process of estimating SK as a function of the FIR filter is optimized by simulated
annealing (SA) [9], which is a metaheuristic global optimization tool. The flowchart of
implementing is illustrated in Fig. 6. In reach iteration, there is a chance that a worse case would
be accepted and thus simulated annealing can avoid the searching being trapped in a local
extremum.
h rounds of SA will be operated. Each round gets the initial input from the result of the FIR
filter-bank analysis.
Initialize the temperature T
Use the initial input vector W
Compute function value SK(W)
Generate a random step S
Keep x unchanged, reduce T
Compute function value SK(W+S)
No
No
SK(W+S) >
SK(W)
Yes
exp[(SK(W) <
SK(W+S) )/T] >
rand ?
Yes
Replace W with W+S, reduce T
Termination
criteria reached?
Yes
End a round of searching
Fig. 6, Flow chart of simulated annealing
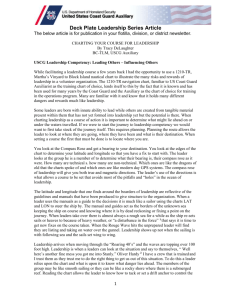
(5) Envelope analysis
When the optimized frequency band is found, envelope analysis is applied to the filtered
signal. The enveloped signal is obtained from the magnitude of the analytic signal which is
constructed via Hilbert transform:
yˆ o (t ) y o ( )h(t )d
h(t )
1
t
Analytic signal
ya (t ) yo (t ) jyˆ o (t )
The envelope is the magnitude of the analytic signal
a(t ) | ya (t ) |
Amplitude
Fig. 7 shows the effect of envelope analysis on a modulated signal
Enveloped signal
0.5
Original signal
0
-0.5
0.032
0.033
0.034
0.035
0.036
0.037
Hilbert transform of
the original signal
0.038
Time(s)
Fig. 7, Effect of envelope analysis
III.
Implementation
Hardware: personal computer.
Software: Matlab 2012a
Parallel computing:
- Simulated annealing has independent loops. Parallel computing will be
implemented on this module.
- Parallel computing version programs will be developed with Matlab parallel
computing tool box.
Result in the final report will be generated by a personal computer with either of the
following configurations.
Table 1: Hardware
Processor
Memory
AMD Athlon II X4 631
with 4 cores at 2.6GHz
DDR3 PC3 1333MHz 8GB
GPU
OS
NVIDIA GeForce GTX 260
with 192 CUDA cores
64-bit Windows 7
IV.
Database
Database of this project was published by the Bearing Data Center of Case Western Reserve
University [10]
It has four groups of data: one group of normal baseline data, and three groups of bearing
fault data. Each group of data has vectors corresponding to different motor loads and bearing
fault conditions.
Two kinds of artificial noise will be added to the data: additive Gaussian white noise, and
discrete frequency noise.
V.
Validation
Validation includes module validation and the overall validation.
To validate the program of SK, a periodic signal will be used as the input, and analytical
solution will be derived as the reference. Then the numerical solution will be compared. To
validate the FIR filter-band, a signal with pre-determined multiple frequency components will be
used as the input. Numerical solution will be compared with the pre-determined frequency
components. To validate SA program, a 3-parameter function with pre-determined maximum is
constructed as the input. The numerical solution will be compared with the pre-determined
maximum. To validate EA, a modulated signal with pre-determined modulating and carrier
signals will be used as the input. Numerical solution will be compared with the pre-determined
modulating frequency. Finally, the overall program is validated. Real bearing signals from the
data base are used as the input. Numerical solutions will be compared with the fault feature
frequencies provided by the database document.
Validation
SK
Input
A simplified signal
Filter-bank
SA
A signal with multiple
frequency components
A 3-parameter function
EA
A modulated signal
Overall
Real bearing signals
Table 2: Validation
Control Result
Analytic solution
Pre-determined frequency
components
Pre-determined maximum
Pre-determined modulating
frequency
Pre-determined fault feature
frequency
Test Result
Numerical solution
Numerical solution
Numerical solution
Numerical solution
Numerical solutions
VI.
Schedule
2012
• October
- Literature review; exact validation methods; code writing
• November
- Middle: code writing
- End: Validation for envelope analysis and spectral kurtosis
• December
- Semester project report and presentation
2013
• February
- Complete validation
• March
- Adapt the code for parallel computing
• April
- Validate the parallel version
• May
- Final report and presentation
VII. Deliverables
Matlab code, test result, final report, final presentation
References
[1] L. M. Popa, B.-B. Jensen, E. Ritchie, and I. Boldea, “Condition monitoring of wind
generators,” in Proc. IAS Annu. Meeting, vol. 3, 2003, pp. 1839-1846.
[2] Wind Stats Newsletter, 2003–2009, vol. 16, no. 1 to vol. 22, no. 4, Haymarket Business
Media, London, UK
[3] H. Link; W. LaCava, J. van Dam, B. McNiff, S. Sheng, R. Wallen, M. McDade, S. Lambert,
S. Butterfield, and F. Oyague,“Gearbox Reliability Collaborative Project Report: Findings from
Phase 1 and Phase 2 Testing", NREL Report No. TP-5000-51885, 2011
[4] C. Hatch, “Improved wind turbine condition monitoring using acceleration enveloping,”
Orbit, pp. 58-61, 2004.
[5] Plane crash information
http://www.planecrashinfo.com/1987/1987-26.htm
[6] P. D. Mcfadden, and J. D. Smith, “Model for the vibration produced by a single
point defect in a rolling element bearing,” Journal of Sound and Vibration, vol. 96,
pp. 69-82, 1984.
[7] J. Antoni, “The spectral kurtosis: a useful tool for characterising non-stationary signals”,
Mechanical Systems and Signal Processing, 20, pp.282-307, 2006
[8] P. O. Amblard, M. Gaeta, J. L. Lacoume, “Statistics for complex variables and signals - Part I:
Variables”, Signal Processing 53, pp. 1-13, 1996
[9] S. Kirkpatrick, C. D. Gelatt, and M. P. Vecchi, "Optimization by Simulated Annealing".
Science 220 (4598), pp. 671–680, 1983
[10] Case Western Reserve University Bearing Data Center
http://csegroups.case.edu/bearingdatacenter/home