N06
advertisement

N06
Digital Signals
Analog signals - continuous
a) amplitude
b) time
Digital signals - discrete values
a) amplitude
b) time
Amplitude
digitizer must have sufficient 1) span
2) resolution
3) accuracy
Time
digitzer must have sufficient 1) speed - convert and store
2) capacity
3) precision
Fixed sampling rate
h = time interval between samples (constant)
fS = 1 / h
page 1 of 22
N06
Time domain
Digital domain
page 2 of 22
xt for 0 t t MAX
x i for 1 i n at t i h i 1
x(t)
t
xi
N06
page 3 of 22
Aliasing
30/60/90/120 Hz sampled at 200 Hz
1
0
-1
150/180/210/240 Hz sampled at 200 Hz
1
0
0
0.05
0.1
-1
1
1
0
0
-1
0
0.05
0.1
-1
1
1
0
0
-1
0
0.05
0.1
-1
1
1
0
0
-1
0
0.05
Time (sec)
0.1
-1
0
0.05
0.1
0
0.05
0.1
0
0.05
0.1
0
0.05
Time (sec)
0.1
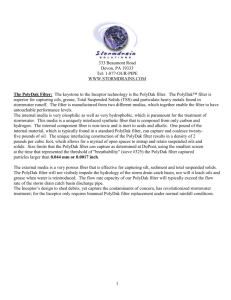
Aliasing = fs/2 - abs( mod(f,fs) - fs/2 )
100
Apparent frequency [Hz] for fs=200 Hz
90
80
70
60
50
40
30
20
10
0
0
50
100
150
200
250
Actual frequency [Hz]
300
350
400
N06
% alias.m - aliasing due to undersampling
% HJSIII - 07.11.12
clear
% actual sampling rate 200 Hz
fs = 200;
% sampling rate for display
fsfast=2000;
% sampling times
dt = 1 / fs;
dtfast = 1 / fsfast;
% fill sample buffers
tend = 0.1;
ns = tend / dt;
nsfast = tend / dtfast;
ts = (0:ns) * dt;
v30 = sin( 2 * pi * 30 *
v60 = sin( 2 * pi * 60 *
v90 = sin( 2 * pi * 90 *
v120 = sin( 2 * pi * 120
v150 = sin( 2 * pi * 150
v180 = sin( 2 * pi * 180
v210 = sin( 2 * pi * 210
v240 = sin( 2 * pi * 240
ts );
ts );
ts );
* ts );
* ts );
* ts );
* ts );
* ts );
tsfast = (0:nsfast) * dtfast;
v30fast = sin( 2 * pi * 30 * tsfast );
v60fast = sin( 2 * pi * 60 * tsfast );
v90fast = sin( 2 * pi * 90 * tsfast );
v120fast = sin( 2 * pi * 120 * tsfast );
v150fast = sin( 2 * pi * 150 * tsfast );
v180fast = sin( 2 * pi * 180 * tsfast );
v210fast = sin( 2 * pi * 210 * tsfast );
v240fast = sin( 2 * pi * 240 * tsfast );
% plot time domain
figure( 1 )
subplot(4,2,1)
plot( ts, v30, ts, v30, 'o', tsfast, v30fast, ':' )
title('30/60/90/120 Hz sampled at 200 Hz')
% xlabel('Time (sec)')
% ylabel('Amplitude')
subplot(4,2,3)
plot( ts, v60, ts, v60, 'o', tsfast, v60fast, ':' )
% title('60 HZ sine sampled at 200 Hz')
% xlabel('Time (sec)')
% ylabel('Amplitude')
subplot(4,2,5)
plot( ts, v90, ts, v90, 'o', tsfast, v90fast, ':' )
% title('90 HZ sine sampled at 200 Hz')
% xlabel('Time (sec)')
% ylabel('Amplitude')
subplot(4,2,7)
plot( ts, v120, ts, v120, 'o', tsfast, v120fast, ':' )
% title('120 HZ sine sampled at 200 Hz')
xlabel('Time (sec)')
% ylabel('Amplitude')
subplot(4,2,2)
plot( ts, v150, ts, v150, 'o', tsfast, v150fast, ':' )
title('150/180/210/240 Hz sampled at 200 Hz')
% xlabel('Time (sec)')
% ylabel('Amplitude')
subplot(4,2,4)
plot( ts, v180, ts, v180, 'o', tsfast, v180fast, ':' )
% title('180 HZ sine sampled at 200 Hz')
% xlabel('Time (sec)')
page 4 of 22
N06
% ylabel('Amplitude')
subplot(4,2,6)
plot( ts, v210, ts, v210, 'o',
% title('210 HZ sine sampled at
% xlabel('Time (sec)')
% ylabel('Amplitude')
subplot(4,2,8)
plot( ts, v240, ts, v240, 'o',
% title('240 HZ sine sampled at
xlabel('Time (sec)')
% ylabel('Amplitude')
tsfast, v210fast, ':' )
200 Hz')
tsfast, v240fast, ':' )
200 Hz')
% plot frequency domain
figure( 2 )
f0 = fs / 2;
f = 0 : 400;
fsym = [ 30 60 90 120 150 180 210 240 270 300 330 360 390 ];
a = f0 - abs( mod(f,fs) - f0 );
asym = f0 - abs( mod(fsym,fs) - f0 );
plot( f, a, fsym, asym, 'o' )
title( 'Aliasing = fs/2 - abs( mod(f,fs) - fs/2 )' )
xlabel( 'Actual frequency [Hz]' )
ylabel( 'Apparent frequency [Hz] for fs=200 Hz' )
page 5 of 22
N06
page 6 of 22
Nonrecursive Digital Filters
analog filter
(only real-time)
VIN
VOUT
xi
yi
digital filter
(real-time, post sampling
and backward in time)
Digital filter
xi raw
yi filtered
Low pass smoothing with moving averages
y i 1 / 2 x i 1 / 2 x i 1
first-order, low pass, backward difference
y i 1/ 3 x i 1/ 3 x i 1 1/ 3 x i2
second-order, low pass, backward difference
y i 1 / 4 x i 1 / 4 x i 1 1 / 4 x i 2 1 / 4 x i 3
order = number of time samples h
third-order, low pass, backward difference
e,g, y i 1/ 2 x i 1/ 2 x i2 is second order
DC gain = sum of coefficients
DC gain > 0
low pass (in general)
DC gain = 0
high pass or bandpass (in general)
N06
page 7 of 22
Backward difference
y i 1 / 3 x i 1 / 3 x i 1 1 / 3 x i 2
a)
b)
c)
d)
all time steps are prior history
has startup artifact
OK for real-time
phase lag
e) finite impulse response (FIR) - no knowledge of events for
t i t EVENT h * order
actual
impulse
xi
yi
i
spring-mass-damper (second order analog filter) has infinite impulse response (IIR)
t
Forward difference
y i 1 / 3 x i 2 1 / 3 x i 1 1 / 3 x i
a)
b)
c)
d)
e)
all time steps in future
has artifact at end of sequence
NOT OK for real-time
phase lead
FIR
N06
page 8 of 22
Central difference
y i 1 / 3 x i 1 1 / 3 x i 1 / 3 x i 1
a)
b)
c)
d)
e)
some time steps in future and some in prior history
has artifact at startup and end of sequence
NOT OK for real-time
zero phase (generally)
FIR
Weighting
y i 1 / 3 x i 1 1 / 3 x i 1 / 3 x i 1
uniform weighing
y i 1 / 4 x i1 1 / 2 x i 1 / 4 x i 1
central weighing
y i 1 / 2 x i1 1 / 4 x i 1 / 4 x i 1
forward weighing
y i 1 / 4 x i1 1 / 4 x i 1 / 2 x i 1
backward weighing
High pass
y i x i x i 1 / h
x
first-order, first derivative, backward difference (actually at i-½)
y i x i1 x i / h
x
first-order, first derivative, forward difference (actually at i+½)
x x i1 / 2 x i1 / 2 / 2 x i1 x i / h
y i x i 1 x i 1 / 2h
x
DC gain = 0
average
second-order, first derivative, central difference
high pass
x x i1 / 2 x i1 / 2 / h x i1 x i / h
x y i x i1 2x i x i1 / h 2
DC gain = 0
x i x i1 / h / 2
high pass
x i x i1 / h / h
second-order, second derivative, central difference
N06
page 9 of 22
Plot the frequency response transfer function of the digital filter shown below that modifies the
sequence xi into a new sequence yi. Circle any filter descriptors that apply.
yi = xi+1 + 3 * xi + xi-1
recursive
nonrecursive
forward-difference
central-difference
backward-difference
high pass
band pass
low pass
FIR
IIR
forward-weighted
centrally-weighted
backward-weighted
phase-lead
zero-phase
phase-lag
startup artifact
no startup artifact
first-order
second-order
third-order
DC gain = 0
DC gain = 1
DC gain = 5
+20 dB
0 dB
-20 dB
0
f / fs = 0.25
f /fs = 0.50
f / fs = 0.75
f / fs = 1.00
N06
page 10 of 22
Plot the frequency response transfer function of the digital filter shown below that modifies the
sequence xi into a new sequence yi. Circle any filter descriptors that apply.
yi = xi+1 + 3 * xi + xi-1
recursive
nonrecursive
forward-difference
central-difference
backward-difference
high pass
band pass
low pass
FIR
IIR
forward-weighted
centrally-weighted
backward-weighted
phase-lead
zero-phase
phase-lag
startup artifact
no startup artifact
first-order
second-order
third-order
DC gain = 0
DC gain = 1
DC gain = 5
N06
page 11 of 22
Frequency response for nonrecursive digital filters
x e j 2 f t
t i h i / fs
r f / fs
x i e j 2 r i
y i x i1 3x i x i1 e j 2 r i1 3e j 2 r i e j 2 r i1
y i e j 2 r i e j 2 r 3 e j 2 r i e j 2 r i e j 2 r
G y i / x i e j 2 r 3 e j 2 r
for r f / f s 0 G 5
backward difference
y i x i 3x i 1 x i 2
G 1 3e j 2 r e j 4 r
N06
page 12 of 22
y(i) = x(i+1) + 3*x(i) + x(i-1)
Gain [dB]
15
10
5
0
0
0.1
0.2
0.3
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0.7
0.8
0.9
1
Phase [deg]
1
0.5
0
-0.5
-1
0.4
0.5
0.6
Frequency ratio r = f/fs
% nonrecursive.m - gain/phase for nonrecursive digital filter
% HJSIII, 13.11.14
r = 0:0.01:1;
G = exp(j*2*pi*r) + 3 + exp(-j*2*pi*r); % central difference
%G = 1 + 3*exp(-j*2*pi*r) + exp(-j*4*pi*r); % backward difference
amp = 20*log10( abs( G ) );
phi = 180/pi*angle( G );
subplot(2,1,1)
plot( r,amp )
ylabel( 'Gain [dB]' )
title( 'y(i) = x(i+1) + 3*x(i) + x(i-1)')
% title( 'y(i) = x(i) + 3*x(i-1) + x(i-2)')
subplot(2,1,2)
plot( r,phi )
ylabel( 'Phase [deg]' )
xlabel( 'Frequency ratio r = f/fs' )
N06
page 13 of 22
Backward difference
y(i) = x(i) + 3*x(i-1) + x(i-2)
Gain [dB]
15
10
5
0
0
0.1
0.2
0.3
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0.7
0.8
0.9
1
Phase [deg]
200
100
0
-100
-200
0.4
0.5
0.6
Frequency ratio r = f/fs
N06
page 14 of 22
Startup artifact (works for recursive and nonrecursive)
examples for second-order backward difference
similar approach for end of sequence artifact
a) ignore - start at i = 3
b) pad with constants -
x 1 x 0 x 1
discontinuity in x , introduces high frequency artifact
i
-1
0
1
2
c) reflect
x 0 x1 d 2 x1 x 2 x1 2x1 x 2
x 1 x1 d3 x1 x 3 x1 2x1 x 3
x1 0 artifact
d2
d3
i
-1
0
1
2
3
Filter forward and then backward in time (works for recursive and nonrecursive)
1)
2)
3)
4)
filter forward in time
reverse sequence of data (e.g. MATLAB "flipud" or "fliplr"
filter again
reverse sequence back to original
can also perform using filter time loops
a) effectively removes phase lag/lead
b) provides double order attenuation
3
N06
page 15 of 22
Recursive Digital Filters
Recursion
compute a new value for a function using old values that were computed with the same function
example - 6 ! 6 5 !
y i 1 / 3 x i 1 / 3 x i 1 1 / 3 y i 1
now includes y i 1
recursion provides IIR capability
must be VERY careful with high pass filters
Standard second-order backward-difference recursive form
y i a 0 x i a 1 x i1 a 2 x i2 b1 y i1 b 2 y i2
DC gain =
a 0 a 1 a 2 b1 b 2
Recursive digital filter to emulate spring-mass-damper
analog filter
VIN
VOUT
xi
yi
digital filter
y
x
m
y
spring-mass-damper
k
c
x
N06
page 16 of 22
F my ky x cy x
ky cx kx
my cy
digitize xi at fs = 1/h and use approximations for derivatives
x i x i 2 / 2h
x
or
x i x i1 / h
y i y i 2 / 2h
y
or
yi yi1 / h
y y i 2y i1 y i2 / h 2
m
m
c
c
m
c
c
2 y i 2 2 y i 1 2 y i 2 y i y i 2 ky i x i x i 2 kx i
2h
2h
h
h
h
2h
2h
m
m c
m c
c
c
k y i 2 2 y i 1 2 y i 2 k x i x i 2
2
2h
2h
h
h
h
2h
2h
m
m c
c
c
m c
k y i k x i x i 2 2 2 y i 1 2 y i 2
2
2h
2h
h
h
2h
2h
h
ch kh 2
1
2m
m
ch kh 2
y i
m
2m
Butterworth = critical damping
f
ch 2 m n
2 c
2m 2 m f s
fs
ch
ch
x i
x i 2 2y i 1 1
y i 2
2m
2m
c 2m n
n
kh 2 2n f c
2 2
m
fs fs
2
k
2f c
m
h
1
fs
N06
page 17 of 22
standard second-order backward-difference recursive form
y i a 0 x i a 1 x i1 a 2 x i2 b1 y i1 b 2 y i2
sample values for fc = 4 Hz, fs = 60 Hz
A 1 2
fc fc
2
f s f s
f
f
a 0 2 c 2 c
fs fs
2
2
1.594339
/A
0.372781
0
a1 0
f
a 2 2 c
fs
b1 2 / A
f
b 2 1 2 c
fs
/ A
-0.262729
-1.254439
/ A
0.364490
Hand-made 4 Hz LP Butterworth at 60 Hz sampling
1
0.5
Log gain
0
-0.5
-1
-1.5
-2
-1
-0.5
0
0.5
Log Frequency [Hz]
1
1.5
2
N06
page 18 of 22
Recursive digital filter using z-transform
Laplace transform of transfer function
A 0 A 1s A 2 s 2 ...A k s k Y(s)
G (s)
X(s)
B 0 B1s B 2 s 2 ...B k s k
second order expansion for continuous variables
A 0 x A1 x A 2 x B0 y B1 y B2 y
Butterworth filter low-pass A0 = 1, Aother = 0
Butterworth filter high-pass Ak = 1, Aother = 0
Butterworth filter (low-pass or high-pass)
Order k
B0
B1
B2
1
1
1
2
1
1.4142136
1
3
1
2
2
4
1
2.6131259 3.4142136
corresponding z-transform
H( z)
B3
1
2.6131259
B4
B5
1
a 0 a 1 z 1 a 2 z 2 ...a k z k
Y(z)
1
2
k
X(z)
1 b1z b 2 z ... b k z
expansion for digitized variables
a 0 x i a 1 x i1 a 2 x i2 a k x ik y i b1 y i1 b 2 y i2 b k y ik
standard second-order backward-difference recursive form
y i a 0 x i a 1 x i1 a 2 x i2 b1 y i1 b 2 y i2
second-order coefficients a and b using bilinear transformation from s to z
C = 1 / tan( fc / fs )
A = B0 + B1 C + B2 C2
a0 = ( A0 + A1 C + A2 C2 ) / A
a1 = ( 2 A0 - 2 A2 C2 ) / A
a2 = ( A0 - A1 C + A2 C2 ) / A
b1 = ( 2 B0 - 2 B2 C2 ) / A
b2 = ( B0 - B1 C + B2 C2 ) / A
sample values for fc = 4 Hz, fs = 60 Hz
4.70463
29.78689
0.033571
0.067143
0.033571
-1.41898
0.553269
reference: Digital Signal Processing, W. Stanley, G. Dougherty and R. Dougherty;
2nd ed, Reston, 1984
NOTE: MATLAB butter, filter, and filtfilt interchange a-b terms from notation above.
N06
page 19 of 22
Single transfer function for 10 Hz LP Butterworth
1
0
-2
-3
-4
-5
-1
-0.5
0
0.5
1
1.5
Log Frequency [Hz]
2
2.5
3
Average transfer function for 10 Hz LP Butterworth
1
0
-1
Log gain
Log gain
-1
-2
-3
-4
-5
-1
-0.5
0
0.5
1
1.5
Log Frequency [Hz]
2
2.5
3
N06
% check_filter.m - check transfer function of digital filter
% HJSIII, 13.11.14
clear
% test conditions - 1024 points sampled at 1 KHz
n = 1024;
fs = 1000;
f0 = fs / 2;
dt = 1 / fs;
t = dt * (0:(n-1));
% create second order Butterworth filter - cutoff 100 Hz
fc = 10;
wn = fc / f0;
[ b, a ] = butter( 2, wn );
% frequencies for FFT
df = fs / n;
f = df * (0:(n-1));
f(1) = 1e-20;
lf = log10( f );
% buffer to accumulate average/max/min transfer functions
ave_trf = zeros( n, 1 );
max_trf = -100* ones( n, 1 );
min_trf = 100 * ones( n, 1 );
% repeat for multiple trials
ntrial = 100;
for itrial = 1:ntrial,
% sample random signal
xin = randn( n, 1 );
% apply filter
xout = filter( b, a, xin );
% FFT
fftin = fft( xin );
fftout = fft( xout );
% transfer function
trf = fftout ./ fftin;
mag_trf = log10( abs( trf ) );
ave_trf = ave_trf + mag_trf;
max_trf = max( mag_trf, max_trf );
min_trf = min( mag_trf, min_trf );
% bottom of averaging loop
end
ave_trf = ave_trf / ntrial;
figure( 1 )
plot( lf,mag_trf )
axis( [ -1 3 -5 1 ] )
title( 'Single transfer function for 10 Hz LP Butterworth' )
xlabel( 'Log Frequency [Hz]' )
ylabel( 'Log gain' )
figure( 2 )
plot( lf,ave_trf,'r', lf,max_trf,'g', lf,min_trf,'g' )
axis( [ -1 3 -5 1 ] )
title( 'Average transfer function for 10 Hz LP Butterworth' )
xlabel( 'Log Frequency [Hz]' )
ylabel( 'Log gain' )
page 20 of 22
N06
page 21 of 22
Recursive digital filter in MATLAB
>> help butter
BUTTER Butterworth digital and analog filter design.
[B,A] = BUTTER(N,Wn) designs an Nth order lowpass digital
Butterworth filter and returns the filter coefficients in length
N+1 vectors B (numerator) and A (denominator). The coefficients
are listed in descending powers of z. The cutoff frequency
Wn must be 0.0 < Wn < 1.0, with 1.0 corresponding to
half the sample rate.
If Wn
order
[B,A]
[B,A]
[B,A]
is a two-element vector, Wn = [W1 W2], BUTTER returns an
2N bandpass filter with passband W1 < W < W2.
= BUTTER(N,Wn,'high') designs a highpass filter.
= BUTTER(N,Wn,'low') designs a lowpass filter.
= BUTTER(N,Wn,'stop') is a bandstop filter if Wn = [W1 W2].
When used with three left-hand arguments, as in
[Z,P,K] = BUTTER(...), the zeros and poles are returned in
length N column vectors Z and P, and the gain in scalar K.
When used with four left-hand arguments, as in
[A,B,C,D] = BUTTER(...), state-space matrices are returned.
BUTTER(N,Wn,'s'), BUTTER(N,Wn,'high','s') and BUTTER(N,Wn,'stop','s')
design analog Butterworth filters. In this case, Wn is in [rad/s]
and it can be greater than 1.0.
See also buttord, besself, cheby1, cheby2, ellip, freqz, filter.
N = order
Wn = fC / fn = fC / (fS/2)
NOTE: MATLAB butter, filter, and filtfilt interchange a-b terms from notation above.
N06
>> help filter
FILTER One-dimensional digital filter.
Y = FILTER(B,A,X) filters the data in vector X with the
filter described by vectors A and B to create the filtered
data Y. The filter is a "Direct Form II Transposed"
implementation of the standard difference equation:
a(1)*y(n) = b(1)*x(n) + b(2)*x(n-1) + ... + b(nb+1)*x(n-nb)
- a(2)*y(n-1) - ... - a(na+1)*y(n-na)
If a(1) is not equal to 1, FILTER normalizes the filter
coefficients by a(1).
FILTER always operates along the first non-singleton dimension,
namely dimension 1 for column vectors and non-trivial matrices,
and dimension 2 for row vectors.
[Y,Zf] = FILTER(B,A,X,Zi) gives access to initial and final
conditions, Zi and Zf, of the delays. Zi is a vector of length
MAX(LENGTH(A),LENGTH(B))-1, or an array with the leading dimension
of size MAX(LENGTH(A),LENGTH(B))-1 and with remaining dimensions
matching those of X.
FILTER(B,A,X,[],DIM) or FILTER(B,A,X,Zi,DIM) operates along the
dimension DIM.
See also filter2 and, in the signal Processing Toolbox, filtfilt.
Overloaded methods:
timeseries/filter
fxptui.filter
dfilt.filter
>> help filtfilt
FILTFILT Zero-phase forward and reverse digital filtering.
Y = FILTFILT(B, A, X) filters the data in vector X with the filter described
by vectors A and B to create the filtered data Y. The filter is described
by the difference equation:
y(n) = b(1)*x(n) + b(2)*x(n-1) + ... + b(nb+1)*x(n-nb)
- a(2)*y(n-1) - ... - a(na+1)*y(n-na)
After filtering in the forward direction, the filtered sequence is then
reversed and run back through the filter; Y is the time reverse of the
output of the second filtering operation. The result has precisely zero
phase distortion and magnitude modified by the square of the filter's
magnitude response. Care is taken to minimize startup and ending
transients by matching initial conditions.
The length of the input x must be more than three times
the filter order, defined as max(length(b)-1,length(a)-1).
Note that FILTFILT should not be used with differentiator and Hilbert FIR
filters, since the operation of these filters depends heavily on their
phase response.
See also filter.
>>
page 22 of 22