dynamics - solved examples of the coursework 5

GENERAL EQUATION OF KINETICS
Problem
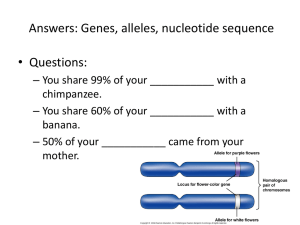
The system shown in fig.1 accelerates uniformly from rest under the action of a force F applied to a masscenter of a homogeneous cylinder (3) rolling without sliding. The cylinder (2) is heterogeneous, while a block (1) is sliding up the rough inclined plane. Apply the general equation of kinetics to determine:
1) The linear acceleration of block (1), if the friction in bearing C
2 is represented by a torque M ; fr
2) The support reactions and the forces in the strings accepted as massless and inextensible.
Data:
Fig. 1 m
1
24 m m
2
m
3
42
54 m
0 , 15 m
F
M i
2
500
100
R
1 m
R
N
1
Nm m
Solution:
1. Determination of the acceleration of block (1)
Determine:
1) a
1
?
2) Support reactions and forces in the strings
W ( F i
)
W (
i
)
0 , where
W (
F i
)
i n
1
F i
r i
and
W (
i
)
respectively, causing the virtual displacement i n
1
r i i
r i
are the virtual works of the external and the fictitious forces,
of their points of application.
1.1 Determination of the external forces virtual work
W (
F i
)
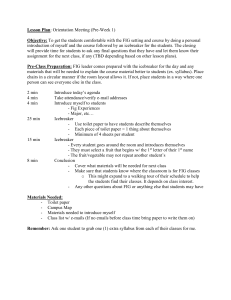
We introduce the external forces and moments acting upon the system of bodies (Fig. 2):
Block (1):
Self-weight G
1
m
1
.
g
24 .
9 , 81
235 , 44 N;
Normal reaction
Friction force T
1
Cylinder (2):
Self-weight G
2
N
1
G
1
N
m
2
.
g
1
.
cos 30
0
42 .
9 , 81
0 , 15 .
203 , 9
203 , 9
N;
30 , 58
412 , 02
N.
N;
Support reactions C
2 V
Torque M fr
and C
2 H
– their magnitudes and senses are unknowns;
100 Nm representing the friction in bearing C .
2
Cylinder (3):
1
Driving force
Self-weight G
3
F
500
m
3
.
g
N;
54 .
9 , 81
529 , 74 N;
Support reactions N
3 and T
3
– their magnitudes and the sense of T
3 are unknowns.
The directions and senses of the external forces and moments as well as the directions and senses of the velocities of the bodies and some typical points are given in fig.2.
Fig. 2
After that, the virtual displacement of the system of bodies must be given: block (1) performs translation – the virtual displacement
of sense, depending on the sense of motion, is given; cylinder (2) rotates about point C – the
2 virtual rotation
the virtual rotation
2
3 x
1
is given; cylinder (3) performs plane motion – the virtual displacement
about its mass-center are given (Fig.3).
x
3
of its mass-center and
Fig. 3
It is obvious that the virtual displacements and rotations of the bodies are not independent – the connection between them is such one like between the velocities (Фиг.3):
2
V
1
2 R
2
x
1
2 R
; V
2
2
.
3 R
3
2
V
1
,
3
V
2
4 R
3 V
1
8 R
3
3
8 x
1
R
; V
C 3
3
2 R
3
4
V
1
x
3
3
4
x
1
.
Furthermore, joining the external forces and moments and the virtual displacement and rotations corresponding
W ( F i
)
W ( F )
W ( M fr
)
W ( G
1
)
W
( T
1
) ,
2
where
(3),
W
W
(
M
( fr
F
)
) is the virtual work of the driving force is the virtual work of the torque of the self-weight G
1
F causing the virtual displacement of the mass-center of cylinder
M for the virtual rotation of cylinder (2), fr
corresponding to the virtual displacement of block (1) and
W
( T
1
)
W
( G
1
) is the virtual work
is the virtual work of the friction force T for the virtual displacement of block (1). The other external forces do not give the work because the
1 displacement of their points of application either are equal to zero or are perpendicular to the forces directions (Fig.4).
Fig. 4
The determination of the external forces virtual work is:
W (
F )
F .
x
3
500 .
3
4
x
1
375
x
1
;
W (
M fr
)
M fr
.
2
M fr
.
2 x
R
1
100 .
x
2
1
50
x
1
;
W
W
( G
1
( T
1
)
)
G
T
1
.
1
.
sin x
1
30
0
.
x
1
.
N
1
.
x
1
24 .
9 , 81 .
0 , 5 .
x
1
.
G
1
.
cos 30
117 , 72
0
.
x
1
x
1
;
0 , 15 .
24 .
9 , 81 .
0 , 866 .
x
1
30 , 58
x
1
.
The virtual works of the self-weight and the friction force have a sign minus because their senses are opposite to the sense of the block’s virtual displacement!
W ( F i
)
375
x
1
50
x
1
117 , 72
x
1
30 , 58
x
1
176
1.2 Determination of the fictitious forces virtual work
, 7
x
1
W (
i
.
)
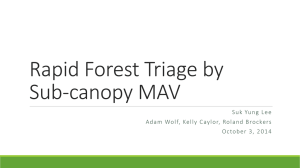
Fig. 5
3
The fictitious forces and moments depend on the types of motion and the accelerations of the bodies. Besides, their senses are always opposite to the accelerations senses (Fig.5):
Block (1) is in translation – the fictitious force
1
m
1
.
a
1
is introduced;
Cylinder (2) rotates about its mass-center – we put the fictitious moment M
Ф 2
I
C 2
.
2
, where
I
C 2
m
2
.
i
2
2
42 .
1 2
42 kgm 2 is the moment of inertia of the cylinder (2) about its mass-center;
Cylinder (3) performs plane motion – we introduce the fictitious force
3
m
3
.
a
3
and fictitious moment
M
Ф
3
I
C 3
.
3
, where I
C 3
0 , 5 .
m
3
.( 2 R )
2
0 , 5 .
54 .( 2 .
1 )
2
108 kgm 2 is the moment of inertia of the cylinder (3) about its mass-center.
After that, the connection between the accelerations (such one like the velocities) is written (Fig.5):
2
V
1
2 R
Then:
2
a
1
2 R
; V
2
2
.
3 R
3
2
V
1
,
3
V
4
2
R
3 V
8 R
1
3
3 a
8 R
1
; V
C 3
3
2 R
3
4
V
1
a
3
3
4 a
1
.
M
Ф
2
I
C 2
.
2
42 .
a
1
2 R
21 a
1
;
3
54 .
3
4 a
1
40 , 5 a
1
; M
Ф
3
108 .
3 a
1
8 R
40 , 5 a
1
.
Fig. 6
W (
i
)
W (
1
)
W ( M
Ф 2
)
W (
3
)
W ( M
Ф 3
) .
W
W
(
1
)
(
M
Ф 2
)
1
.
x
1
24 a
1
x
1
;
M
Ф 2
.
2
21 a
1
2
21 a
1
x
1
10 , 5 a
1
x
1
;
W
(
3
)
3
.
x
3
40 , 5 a
1
3
4
x
1
2 R
30 , 375 a
1
x
1
;
W (
M
Ф 3
)
M
Ф 3
.
3
40 , 5 a
1
3
40 , 5 a
1
3
x
1
15 , 1875 a
1
x
1
.
8 R
The connection between the velocities and the virtual displacements and rotations mentioned earlier has been used again so that the fictitious forces virtual works to be obtained as functions of one unknown – the virtual displacement of block (1). The virtual works of the fictitious forces are negative because all of the forces and moments have senses opposite to the senses of the displacements and rotations corresponding to them (Fig.6).
Then:
W (
i
)
24 a
1
x
1
10 , 5 a
1
x
1
30 , 375 a
1
x
1
15 , 1875 a
1
x
1
80 , 0625 a
1
x
1
.
Finally, we substitute for the expressions obtained in the General equation of Kinetics:
4
W (
F i
)
176 , 7
x
1
W
(
i
)
0 ;
80 , 0625 a
1
x
1
0 ; a
1
176 , 7
80 , 0625
2 , 2 m/s 2 .
2. Determination of the support reactions and the forces in the strings
First, the magnitudes of the fictitious forces and moments are calculated:
1
3
m
1
.
a
1
40 , 5 a
1
24 .
2 , 2
40 , 5 .
2 , 2
52
, 8 N;
89 , 1 N;
M
Ф 2
M
Ф 3
21 a
1
40 , 5 a
1
21
.
2 , 2
46
40 , 5 .
2 , 2
, 2 Nm;
89 , 1 Nm.
Then, the system of bodies is separated and the relevant equilibrium equations are used for the determination of the support reactions and the forces in the strings. The last equation is for the check of the results obtained!
Block 1 (Fig.7a):
F ix
1
0 ; S
1
G
1 sin 30
0
T
1
1
0 ;
S
1
S
1
S
1
G
1 sin 30
0
235 , 44 .
0 , 5
T
1
30
1
, 58
;
52 , 8 ;
201 , 1 N.
Fig. 7а
Cylinder (2) (Fig.7b):
M
C
2
0 ; S
2
.
3 R
3 S
2
S
1
.
2 R
2 S
1
M
M fr
fr
M
M
Ф 2
;
Ф
2
3 S
S
2
2
2 .
182
201
, 8
, 1
N.
100
46 , 2 ;
F iH
0 ; C
2 H
C
2 H
C
2 H
S
1 cos 30
0
201 , 1 .
0 , 866
182 , 8 ;
8 , 64 N.
S
2
0 ;
F iV
0 ; C
2 V
C
2 V
S
1 sin 30
0
G
2
0 ;
201 , 1 .
0 , 5
412 , 02 ;
C
2 H
512 , 57 N.
0 ;
Fig. 7b
5
Cylinder (3) (Fig.7c):
Fig. 7c
F iH
0 ;
T
3
T
3
S
2
500
T
3
3
F
0 ;
182 , 8
89 , 1 ;
228 , 1 N.
F iV
0 ; N
3
G
3
0 ;
N
3
G
3
;
N
3
529 , 74 N.
Check:
M
C
3
0 ; S
2
.
2 R
T
3
.
2 R
M
Ф 3
182
454
, 8
, 7
.
2
228 , 1 .
2
456 , 2
1 , 5
89 , 1
;
0
;
0 ;
- Error calculation:
1 , 5
454 , 7
.
100
0 , 33 %
3 % !
6
PRINCIPLE OF VIRTUAL DISPLACEMENTS
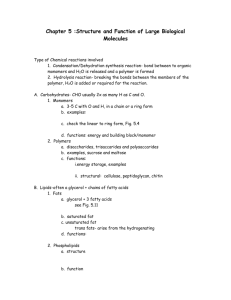
Problem
The plane structure is supported and loaded as shown in fig.1. Apply the principle of virtual displacements to determine the support reactions and the forces in the truss members 1 and 2.
Fig. 1
Solution:
I. Introduction where
The Principle of virtual displacements can be written in the form:
F i
.
V
i
and
M i
.
i
F i
.
V i
M i
.
i
0 , /1/
are the powers of the external forces and moments, respectively.
The idea of the method is, first, the support containing the reaction searched to be eliminated and the reaction to be introduced instead as an external force (moment) – the construction becomes a mechanism. After that, the velocities of the points and members of the mechanism have to be put and expressed as a function of one of them. Further, the expressions of the forces and moments powers must be written in equation /1/. In this way, only the support reaction will be the unknown in /1/ and it will be easily carried-out .
II. Determination of the support reactions
1. Support reaction in roller А
We eliminate the roller and apply the support reaction
А
instead. Now, the construction is a mechanism (Fig.2).
Fig. 2
7
1.1
Kinematical analysis
The mechanism obtained consists of three parts and their types of motion must be determined: body (1) /the truss/ performs plane motion, body (2) performs rotation about point D and body (3) is immovable (Fig.2). The linear and angular velocities of the points and the bodies are introduced and obtained as a function of
1
:
V
C
1
.
CP
1
1 , 5 .
1
;
2
V
C
CD
1
.
CP
1
CD
1 , 5 .
1
2
0 , 75 .
1
.
1.2
Substitution in (1):
A .
1 , 5 .
1
A .
1 , 5 .
1
Dividing both sides by
A .
1 , 5
1 , 5 .
A
F
1
.
1 .
1
F
1
.
1 .
1
R .
1 .
R .
1 .
0 , 75 .
, it is obtained:
1
F
1
.
1
40 .
1
R .
1 .
0 , 75
20 .
1 .
0 , 75
2
0
0
,
,
0
1
,
A
16 , 667 kN.
0 .
2. Support reaction in roller В
We eliminate the support and put the reaction B instead – the construction becomes a mechanism (Fig.3).
Fig. 3
2.1
Kinematical analysis
Here, the mechanism also consists of three parts. Their types of motion are: body (1) /the truss/ performs plane motion, body (2) performs rotation about point D and body (3) is fixed (Fig.3). The linear and angular velocities of the points and the bodies are introduced and obtained as a function of
1
again:
V
C
1
.
CL
3 .
1
;
2
V
C
CD
1
.
CL
CD
3 .
1
2
1 , 5 .
1
.
2.2
Substitution in (1):
Dividing by
B .
1 , 5 .
B .
1 , 5 .
1
1
F
1
.
1 .
1
F
1
1
, it is obtained:
B .
1 , 5
1 , 5 .
B
F
1
.
1
40 .
1
B
.
1 .
1
F
2
25 .
1 ,
.
1 , 5
5
F
2
F
2
18 , 333 kN.
.
1 , 5 .
1
.
1 , 5 .
1
R .
1 .
1 , 5
20 .
1 .
1 , 5
R .
1 .
2
R .
1 .
1 , 5 .
1
0 ,
0 ,
0 ,
0 ,
3. Reactive moment in fixed support Е
We eliminate the support constraining rotation in point Е and apply the moment
М
Е
instead – the construction becomes a mechanism (Fig.4).
8
Fig. 4
3.1
Kinematical analysis
The mechanism obtained consists of three parts again. Their types of motion are: body (3) performs rotation about point Е, the truss (1) – plane motion and body (2) – translation. Now, the linear and angular velocities of the points and the bodies are introduced and obtained as a function of V :
C
V
D
V
C
;
3
V
D
DE
3.2 Substitution in (1):
M
E
.
3
V
C
DE
M .
3
V
C
3
F
1
.
V
C
.
0 ,
M
E
.
V
C
3
M .
V
C
3
Dividing by V , it is obtained:
C
F
1
.
V
C
0 ,
1
3
M
E
1
3
M
F
1
0 ,
1
3
M
M
E
1
3
.
32
152
kNm.
40
E
0 ,
4. Horizontal support reaction in Е
We eliminate the support constraining the horizontal displacement of point Е and apply the support reaction
Е
Н instead – the construction becomes a mechanism (Fig.5).
4.1
Kinematical analysis
The mechanism obtained consists of three parts performing translation (Fig.5) and their velocities are expressed as a function of V :
C
V
D
V
C
; V
E
V
D
V
C
.
4.2 Substitution in (1):
E
H
.
V
E
F
1
.
V
C
0 ,
E
H
.
V
C
E
H
F
1
F
1
.
V
C
40
0 , kN.
The sign “ – “ means that the direction chosen for Е
Н
is not correct and have to be changed (Fig.5).
9
Fig. 5
5. Vertical support reaction in Е
We eliminate the support constraining the vertical displacement of Е and apply the support reaction
Е
instead
V
– the construction becomes a mechanism (Fig.6).
Fig. 6
5.1
Kinematical analysis
The mechanism obtained consists of three parts again and their types of motion must be determined. However, in this case the analysis is more difficult than the previous cases. We will start with body (3). Because of the Napparatus substituted for the fixed support in point E, body (3) can only translate in vertical direction. The truss (1) also performs translation – there are two rollers (A and B) belonging to it, which directions of the velocity are parallel to each
10
other. Then, the velocity of point C also must be equal and parallel to the velocities of points A and B. We continue with body (2) – the instantaneous center of zero velocity (point P
2
) must be located. We intersect the perpendiculars to the points C and D velocities directions and we find that point P
2 coincides with point C – then, the conclusion, that body (1) is immovable, is made (Fig.6).
The linear and angular velocities of the points and the bodies are introduced and expressed as a function of V
Е
:
V
D
V
Е
;
2
V
D
DC
5.2 Substitution in (1):
E
V
.
V
E
R .
1 .
2
0 ,
V
E
DC
V
E
2
.
E
V
.
V
E
R .
1 .
V
E
2
Dividing by V , it is obtained:
E
E
V
1
2
.
R .
1
0 ,
E
V
E
V
1
2
.
20 .
1
10 kN.
0 ,
0 ,
6. Check for the results obtained (Fig.7)
М
C
0 ;
А
.
3
B .
1 , 5
16 , 667 .
3
F
1
.
1
F
2
18 , 333 .
1 , 5
.
1 , 5
40 .
1
249 , 5
249 , 5
0 !
R .
1
M
25 .
1 , 5
E
H
20 .
1
.
3
E
V
32
.
2
40 .
3
M
E
10 .
2
0 ;
152
0 ;
Fig. 7
III. Determination of the forces in the truss members 1 and 2
1.
The force in member 1
We eliminate member 1 and apply force S
1
(in tension) instead – now, the construction is a mechanism (Fig.8).
1.1
Kinematical analysis
The mechanism obtained consists of four parts and their types of motion must be determined: body (1) – translation, body (2) – plane motion, body (3) – rotation about D and body (4) – unmovable (Fig.8). The linear and angular velocities of the points and the bodies are introduced and expressed as a function of
3
:
11
V
C
3
.
CD
2 .
3
;
2
V
C
CP
2
2 .
3
1 , 5
1 , 333 .
3
; V
K
2
.
KP
2
1 , 333 .
3
.
1
1.2 Substitution in (1):
S
1
.
V
K
S
1
F
1
.
V
K
.
1 , 333 .
3
Dividing by
3
, it is obtained:
1 , 333 .
S
1
1 , 333 .
S
1
S
1
F
1
R .
1 .
3
.
1 , 333 .
3
0 ,
1 , 333 .
F
1
1 , 333 .
40
R .
1
20 .
1
0 ,
0 ,
R .
1 .
3
0 ,
25 kN – the member 1 is compressed!
1 , 333 .
3
.
Fig. 8
2.
The force in member 2
We eliminate member 2 and apply the force S (in tension) instead – the construction becomes a mechanism
2 again (Fig.9).
2.1
Kinematical analysis
The mechanism obtained consists of four parts and their type of motion must be determined: body (1) – translation, body (2) – plane motion, body (3) – rotation about D and body (4) – unmovable (Fig.9). The linear and angular velocities of the points and the bodies are introduced and expressed as a function of
2
:
V
K
2
.
KP
2
2
; V
C
2
.
CP
2
1 , 5 .
2
3
V
C
CD
1 , 5 .
2
2
0 , 75 .
2
.
2.2 Substitution in (1):
F
1
.
V
K
Dividing by
S
2
.
1 , 5 .
R
2
.
1 .
3
0 ,
2
, it is obtained:
F
1
.
F
1
40
2
S
2
1 , 5 .
S
2
1 ,
S
5 .
S
2
2
.
1 , 5 .
2
0 , 75 .
R
0 , 75 .
20
16 , 667
R .
1 .
0 , 75 .
0
0
,
,
2
0 , kN – the member 2 is compressed!
12
Fig. 9
13