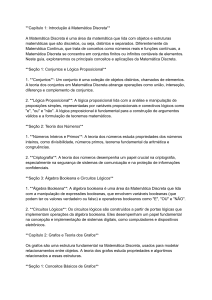
Faculdade de Engenharia Sistemas Lineares e Invariantes Power Spectral Density -14 Hamming kaiser Chebyshev -16 Env B F CS1 CS2 B F -18 Ground Revolute Body CS1 Revolute1 Power/frequency (dB/Hz) -20 -22 Body1 Revolute1 -24 Sine Wave Joint Actuator Joint Sensor1 -26 -28 Two coupled planar pendulums with gravity and sine wave forcing in the upper Revolute joint. -32 -34 0 Angle Double Pendulum -30 0.05 0.1 0.15 0.2 0.25 0.3 Frequency (kHz) 0.35 0.4 0.45 Revolute Joint Sensor 0.5 SS – MIEIC 2007/2008 Programa de SS Faculdade de Engenharia Sinais e Sistemas à 5 aulas Sistemas Lineares e Invariantes à 4 aulas Análise de Fourier (tempo contínuo) à 8 aulas Análise de Fourier (tempo discreto) à 6 aulas Amostragem de Sinais Contínuos à 2 aulas SS 0708 SLITs 2 1 Sistemas lineares e invariantes no tempo – aula de hoje Faculdade de Engenharia Sistemas lineares e invariantes SLITs discretos – resposta impulsional Convolução discreta Convolução discreta e resposta de SLITs SLITs contínuos – resposta impulsional Convolução contínua Convolução contínua e resposta de SLITs SS 0708 SLITs 3 Sistemas Lineares e Invariantes no Tempo – SLITs Faculdade de Engenharia São sistemas que verificam simultaneamente as propriedades de linearidade e invariância. Num SLIT contínuo tal que x1 (t ) → y1 (t ), x2 (t ) → y 2 (t ), x3 (t ) → y3 (t ), ... verifica-se a1 x1 (t − t1 ) + a2 x2 (t − t 2 ) + a3 x3 (t − t3 ) + ... → a1 y1 (t − t1 ) + a2 y 2 (t − t 2 ) + a3 y3 (t − t3 ) + ... Num SLIT discreto tal que x1[n] → y1[n], x 2 [n] → y 2 [n], x3 [n] → y3 [n], ... verifica-se a1 x1[n − n1 ] + a2 x 2 [n − n2 ] + a3 x3 [n − n3 ] + ... → a1 y1[n − n1 ] + a2 y 2 [n − n2 ] + a3 y3 [ n − n3 ] + ... SS 0708 SLITs 4 2 Decomposição de sinais em impulsos – tempo discreto Faculdade de Engenharia x1[n] Exemplo 1 -3 -2 -1 0 1 -1 2 3 n x1[0]δ[n] x1[−1]δ[n + 1] x1[1]δ[n − 1] 1 -3 -2 -1 0 1 2 3 n -3 -2 -1 1 0 1 2 3 n -3 -2 -1 0 1 2 3 n x1[n] = x1[−1]δ[n + 1] + x1[0]δ[n] + x1[1]δ[n − 1] SS 0708 SLITs 5 Decomposição de sinais em impulsos – tempo discreto Faculdade de Engenharia Para um sinal em tempo discreto qualquer, tem-se x[n] = L + x[−2]δ[n + 2] + x[−1]δ[n + 1] + x[0]δ[n] + x[1]δ[n − 1] + x[2]δ[n − 2] + L ou ainda x[n] = +∞ ∑ x[k ]δ[n − k ] k = −∞ Qualquer sinal em tempo discreto pode ser escrito como uma combinação linear de impulsos unitários deslocados SS 0708 SLITs 6 3 Resposta impulsional de um SLIT discreto Faculdade de Engenharia A resposta impulsional de um SLIT discreto define-se como sendo a saída δ[n] h[n] SLIT discreto desse sistema quando a entrada é um impulso unitário e representa-se por h[n]. δ[n] → h[n] δ[n − k ] → h[n − k ] invariância x[n] = +∞ ∑ x[k ]δ[n − k ] y[n] = k = −∞ +∞ y[n] x[n] ∑ x[k ]h[n − k ] SLIT discreto k = −∞ linearidade A resposta de um SLIT discreto a uma entrada x[n] qualquer x[n] y[n] h[n] pode ser obtida apenas à custa da sua resposta impulsional. SS 0708 SLITs 7 Resposta impulsional de um SLIT discreto – exemplo Faculdade de Engenharia x[n] h[n] 1 -3 -2 -1 0 1 2 3 n x[n] = −δ[n + 1] + 2δ[n] − δ[n − 1] −h[n + 1] -3 -2 -1 0 1 n -3 -2 -1 y[n] = ? 0 1 3 n y[n] = − h[n + 1] + 2h[n] − h[n − 1] −h[n − 1] 2h[n] -2 -1 0 2 1 2 n -1 0 1 2 y[n] 3 n -3 -2 -1 0 1 2 3 n SS 0708 SLITs 8 4 Convolução discreta Faculdade de Engenharia A operação que define a saída de um SLIT discreto à custa da resposta impulsional e do sinal de entrada designa-se convolução discreta e representa-se por y[n] = x[n] * h[n] = +∞ ∑ x[k ]h[n − k ] k = −∞ Generalizando, a convolução discreta é uma operação que, a partir de dois sinais em tempo discreto, produz um novo sinal em tempo discreto. y[n] = x1[n] * x2 [n] = +∞ ∑ x [k ] x [ n − k ] 1 2 k = −∞ Assim, pode dizer-se que a resposta de um SLIT discreto a uma dada entrada é a convolução desta entrada com a resposta impulsional do sistema. SS 0708 SLITs 9 Cálculo da convolução discreta Faculdade de Engenharia A partir da definição… x1[n] * x 2 [n] = +∞ ∑ x [k ]x [n − k ] 1 2 k = −∞ = L + x1[−2]x2 [n + 2] + x1[−1]x2 [n + 1] + x1[0]x2 [n] + x1[1]x2 [n − 1] + x1[2]x2 [n − 2] + L soma de cópias do sinal x2, cada uma deslocada de k e multiplicada por x1[k] Nota: Este método, embora directo, revela-se pouco apropriado para sinais com muitas amostras não nulas. SS 0708 SLITs 10 5 Cálculo da convolução discreta Faculdade de Engenharia x1[n] Exemplo: Determinar y[n] = x1[n] * x2 [n] 1 -1 0 y[n] = x 2 [n ] 2 3 n 0 1 -2 -1 n − x 2 [ n] +∞ ∑ x [k ]x [n − k ] 1 2 2 k = −∞ -2 -1 = x1[0]x2 [n] + x1[1]x2 [n − 1] + x1[2]x2 [n − 2] 0 1 n x 2 [n − 1] = − x2 [n] + x2 [n − 1] − x2 [n − 2] -1 0 0 1 1 2 3 n − x2 [n − 2] y[n] -3 -2 -1 2 2 3 4 n 0 1 2 3 4 n SS 0708 SLITs 11 Cálculo da convolução discreta x1[n] * x 2 [n] = +∞ ∑ x [k ]x [n − k ] 1 2 k = −∞ Nota: Faculdade de Engenharia Para cada n, y[n] é igual à soma das amostras do produto de x1[k] por x2[n–k], em que a variável independente é agora k Este método é menos directo, mas aplica-se facilmente a sinais de duração ilimitada e é generalizável para sinais em tempo contínuo Passos de aplicação do método 1. Alterar a variável independente de x1 e x2 para k 2. Rebater o sinal x2[k] (passa de x2[k] a x2[-k]) 3. Deslocar o sinal rebatido de de forma a que a amostra em k=0 passe a estar em k=n 4. Para cada n (de –∞ a +∞) a. multiplicar ponto a ponto os sinais x1 e x2 rebatido e transladado b. somar as amostras do sinal produto, obtendo y[n] SS 0708 SLITs 12 6 Cálculo da convolução discreta – exemplo y[n] = x1[n] * x2 [n] Determinar x1[n] -1 0 1 x 2 [n ] 2 3 n -2 -1 x1[k ] -1 0 Faculdade de Engenharia 1 0 1 2 n x 2 [− k ] x 2 [k ] 2 3 -2 -1 k 0 1 2 k -2 -1 0 1 2 k x 2 [n − k ] n+1 n-2 n-1 n n+2 k SS 0708 SLITs 13 Cálculo da convolução discreta – exemplo Faculdade de Engenharia x1[k ] 1 -1 0 2 3 k x 2 [n − k ] n < −1 n+1 n-2 n-1 n n-2 y[n] = 0 k x 2 [−1 − k ] 0 n = −1 -3 -2 -1 y[−1] = (−1) ⋅ (−1) = 1 1 k x 2 [− k ] n=0 1 -2 -1 0 2 y[0] = 1 ⋅ (−1) + (−1) ⋅1 = −2 k SS 0708 SLITs 14 7 Cálculo da convolução discreta – exemplo Faculdade de Engenharia x1[k ] 1 -1 0 2 3 k x 2 [1 − k ] 2 n =1 -1 1 0 3 y[1] = 1 ⋅1 + (−1) ⋅1 = 0 k x 2 [2 − k ] 3 n=2 0 2 1 4 y[2] = 1⋅1 = 1 k x 2 [n − k ] y[n] = 0 n+1 n>2 n-2 n-1 n n-2 k SS 0708 SLITs 15 Cálculo da convolução discreta – exemplo x1[n] -1 0 1 Faculdade de Engenharia x 2 [n ] 2 3 n -2 -1 0 1 2 n y[n] = x1[n] * x2 [n] -3 -2 -1 0 1 2 3 4 n SS 0708 SLITs 16 8 Cálculo da convolução discreta – exercícios Faculdade de Engenharia Calcule as seguintes convoluções: y1[n] = (− δ[n + 1] + δ[n] + δ[n − 1])* (2δ[n − 1] − δ[n − 3]) y 2 [n] = (u[n] − u[n − 3]) * (2δ[n + 1] − δ[n − 1]) y3 [n] = u[n] * u[n] ( ) y 4 [n] = u[n] * 0.25 n u[n] SS 0708 SLITs 17 9