CÁLCULO AVANÇADO
Primeira Edição
Rolci Cipolatti
Instituto de Matemática - UFRJ
Rio de Janeiro - RJ - Brasil
2016
Caiu a primeira gota na terra seca
Solitária, corajosa, suicida,
Pra que molhe o chão, a planta cresça
Pra que brote o verde, a nova vida
Cairão dezenas no inı́cio
Centenas, milhares em seguida
Mas de nada valerá o sacrifı́cio
Se não vier a chuva decidida
RC
Exórdio
O presente texto iniciou-se como notas de aula e listas de exercı́cios
do Curso de Cálculo Avançado I, curso que ministrei por vários anos
no programa de Mestrado em Matemática Aplicada do Instituto de
Matemática da UFRJ. As notas foram publicadas pela Editora do
IM e continham a primeira parte do programa do Exame de Qualificação de Cálculo Avançado, o que aqui corresponde essencialmente
ao material distribuı́do nos onze primeiros capı́tulos.
Como a inclusão da Integral de Riemann e aplicações se fazia necessária para que essas notas pudessem almejar uma promoção à categoria de livro texto, foram incluı́dos na presente edição os Capı́tulos 12
e 13, um Apêndice contendo coisas básicas da Álgebra Multilinear e,
ao longo do texto, alguns tópicos interessantes que, de um modo
geral, não são abordados nos livros de Análise no Rn . Por uma
questão de nostalgia, preferi manter o tı́tulo Cálculo Avançado, embora o conteúdo abordado contenha o programa básico de um curso
de Análise do mestrado.
Os alunos podem consultar a solução de todos os exercı́cios desta
edição no site abaixo. São vários os que complementam o conteúdo
dos respectivos capı́tulos, razão pela qual recomendamos fortemente
que os considerem, inicialmente procurando resolvê-los e, complementarmente, estudando (e se possı́vel, melhorando) as soluçõas apresentadas.
http://www.dmm.im.ufrj.br/~cipolatti/
Os cursos de Cálculo Diferencial e Integral, assim como Análise na
Reta compõem os pré-requisitos para a leitura confortável do texto.
ii
Cálculo Avançado I
Não posso deixar de agradecer aos alunos e colegas pelas correções
e observações que possibilitaram a presente edição. Sendo eles tantos, certamente cometeria a indelicadeza da omissão caso pretendesse
listá-los. Meu muito obrigado a todos. Como nada substitui o olhar
atento de leitores perspicazes para apontar erros — grandes e pequenos — invisı́veis aos meus olhos, continuarei sempre contando
com as correções e sugestões do leitor, pelo que, desde já, agradeço
calorosamente.
Rio de Janeiro, janeiro de 2016.
Rolci Cipolatti
Sumário
Capı́tulo 1:
Conjuntos e Funções
Operações com conjuntos
Funções . . . . . .
Composição de funções
Sequências . . . . .
Exercı́cios . . . . .
. .
.
. .
. .
. .
. .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
1
2
5
6
7
7
. . . .
. . . .
. . . .
. . .
. . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
11
13
14
17
19
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
21
24
26
29
31
32
33
Capı́tulo 2:
Métricas e Normas
Espaços vetoriais com
Normas em Rn . .
Exemplos de espaçoes
Exercı́cios . . . .
. . . . . .
produto interno
. . . . . . .
vetoriais normados
. . . . . . .
Capı́tulo 3:
Abertos, Fechados, Compactos
Conjuntos compactos . . . . .
Compactos de Rn . . . . . .
Sequências em espaços vetoriais .
Sequências de Cauchy
. . . .
Sequências em Rn . . . . . .
Exercı́cios . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
iv
Cálculo Avançado I
Capı́tulo 4:
Limite e Continuidade
Funções contı́nuas
. . . . . . . . . . . . 35
. . . . . . . . . . . . . . . 38
Funções contı́nuas e compactos
. . . . . . . . . . 40
Funções contı́nuas e conjuntos conexos . . . . . . . . 42
Conjuntos convexos e funções convexas
Continuidade uniforme
. . . . . . . 43
. . . . . . . . . . . . . 45
Espaços vetoriais de dimensão finita
. . . . . . . . 47
O espaço vetorial das transformações lineares
O teorema do ponto fixo de Banach
Semicontinuidade
Exercı́cios
. . . . . 48
. . . . . . . . 48
. . . . . . . . . . . . . . . 50
. . . . . . . . . . . . . . . . . . 54
Capı́tulo 5:
Funções Diferenciáveis
Derivadas direcionais
. . . . . . . . . . . . 61
. . . . . . . . . . . . . . 61
Funções diferenciáveis (o caso escalar) . . . . . . . . 62
O vetor gradiente
. . . . . . . . . . . . . . . 66
Regras básicas de derivação
. . . . . . . . . . . 68
Funções diferenciáveis (o caso vetorial)
A matriz jacobiana
A regra da cadeia
. . . . . . . 69
. . . . . . . . . . . . . . 70
. . . . . . . . . . . . . . . 71
O teorema do valor médio
. . . . . . . . . . . . 72
Derivadas parciais (o caso vetorial) . . . . . . . . . 73
Condições suficientes para a diferenciabilidade . . . . . 74
Funções diferenciáveis (o caso geral)
A diferencial: funções de classe C
A projeção ortogonal
Exercı́cios
1
. . . . . . . . 76
. . . . . . . . . 79
. . . . . . . . . . . . . . 81
. . . . . . . . . . . . . . . . . . 83
Sumário
v
Capı́tulo 6:
Curvas em Rn
. . . . . .
Curvas retificáveis . . . . . .
Curvas diferenciáveis . . . . .
Integral de linha: o caso escalar .
Aplicação: a transformada raio-x
O teorema fundamental do cálculo
Aplicação: conservação da energia
Exercı́cios . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
89
91
92
94
95
99
105
105
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
109
114
114
120
125
O Teorema da Função Inversa . .
O teorema da função inversa . . . .
Aplicação: o método das caracterı́sticas
O teorema da função inversa (bis) . .
Exercı́cios . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
129
130
135
137
140
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
143
146
147
149
151
153
Capı́tulo 7:
Derivadas de Ordem Superior
A matriz hessiana . . . . . .
Máximos e mı́nimos
. . . . .
Partição da unidade
. . . . .
Exercı́cios . . . . . . . . .
Capı́tulo 8:
Capı́tulo 9:
O Teorema da Função Implı́cita
O teorema da função implı́cita
. .
Multiplicadores de Lagrange . . .
Aplicações . . . . . . . . . .
Multiplicadores de Lagrange (bis) .
Exercı́cios . . . . . . . . . .
.
.
.
.
.
.
vi
Cálculo Avançado I
Capı́tulo 10:
Sequências de Funções
Convergência uniforme
. . . . . . . . . . .
157
. . . . . . . . . . . .
159
Convergência uniforme e derivadas
. . . . . . . .
163
Série de funções e convergência uniforme . . . . . .
167
Série de potências
. . . . . . . . . . . . . .
170
A matriz exponencial . . . . . . . . . . . . .
172
Exercı́cios
173
. . . . . . . . . . . . . . . . .
Capı́tulo 11:
O Espaço C(K;Rm )
. . . . . . . . . . . .
Aplicação: o teorema de Picard
O teorema de Arzelà-Ascoli
. . . . . . . . .
178
. . . . . . . . . .
180
Aplicação: o teorema de Cauchy-Peano
O teorema de Weierstrass
. . . . . .
184
. . . . . . . . . . .
187
Funcionais contı́nuos e diferenciáveis
. . . . . . .
190
. . . . . . . . . . . . . .
191
. . . . . . . . . . . . . . . . .
195
Aplicação: fluxos
Exercı́cios
177
Capı́tulo 12:
A integral de Riemann em Rn
. . . . . . . .
201
Áreas, volumes, etc... . . . . . . . . . . . . .
201
A integral de Riemann
. . . . . . . . . . . .
206
. . . . . . . . . . .
219
Como calcular integrais?
Funções de conjuntos e derivadas espaciais
. . . . .
224
Mudança de variáveis . . . . . . . . . . . . .
229
Coordenadas esféricas em Rn e aplicações
. . . . .
237
. . . . . . . . . . . . . . . . .
246
Exercı́cios
Sumário
vii
Capı́tulo 13:
Gauss, Green e Stokes . . . . . . . . . . .
Superfı́cies em Rn . . . . . . . . . . . . . .
253
253
Integrais de superfı́cie em Rn . . . . . . . . . .
O Teorema de Gauss e aplicações
. . . . . . . .
259
262
Campos vetoriais da Fı́sica Matemática . . . . . .
Formas diferenciais - uma breve introdução . . . . .
283
299
O Lema de Hadamard
. . . . . . . . . . . .
Exercı́cios . . . . . . . . . . . . . . . . .
306
311
Apêndice:
Determinantes, traços e etc.
. . . . . . . .
315
Formas n-lineares alternadas . . . . . . . . . .
O determinante . . . . . . . . . . . . . . .
315
317
O traço . . . . . . . . . . . . . . . . . .
O produto tensorial
. . . . . . . . . . . . .
324
326
Referências
. . . . . . . . . . . . . . . . .
333
“Até onde as leis da matemática se refiram à realidade, elas estão longe de constituir algo certo; e,
na medida em que constituem algo certo, não se
referem à realidade.”
(Albert Einstein)
1
Conjuntos e Funções
Um dos fundamentos sobre os quais a Matemática se alicerça é o
conceito de conjunto. No que segue, estabelecemos a notação universalmente adotada e recordamos as operações básicas da Teoria dos
Conjuntos.
Como é usual, a notação
x∈X
indica que o elemento x pertence ao conjunto X. Por outro lado, para
indicar que o elemento x não pertence ao conjunto X, escrevemos
x∈
/ X.
Dizemos que A é subconjunto de B se todo elemento pertencente a
A também pertence a B. Neste caso denotamos A ⊂ B ou B ⊃
A. Dizemos que dois conjuntos são iguais se possuem os mesmos
elementos. Assim, A = B se e somente se A ⊂ B e B ⊂ A.
Representamos por ∅ o conjunto vazio, isto é, o (único!) conjunto
que não possui elementos.
Denotamos por N, Z, Q, R e C respectivamente os conjuntos dos
números naturais, inteiros, racionais, reais e complexos, munidos de
suas respectivas estruturas algébricas.
2
Cálculo Avançado I
Operações com conjuntos
Nesta seção vamos introduzir as operações básicas da Teoria dos
Conjuntos que serão exaustivamente utilizadas no restante do texto.
• União e Interseção
Dados dois conjuntos A e B, definimos
A ∪ B = x ; x ∈ A ou x ∈ B
A ∩B = x; x ∈ A e x ∈ B
Uniões e interseções gozam das seguintes propriedades básicas, denominadas respectivamente associatividade, comutatividade e distributividade.
◦ (A ∪ B) ∪ C = A ∪ (B ∪ C),
◦ A ∪ B = B ∪ A,
(A ∩ B) ∩ C = A ∩ (B ∩ C);
A ∩ B = B ∩ A;
◦ (A∪B)∩C = (A∩C)∪(B∩C),
(A∩B)∪C = (A∪C)∩(B∪C).
Mais geralmente, se {Aλ }λ∈Λ é uma famı́lia qualquer de conjuntos,
definimos:
[
λ∈Λ
\
λ∈Λ
n
o
Aλ = x ; x ∈ Aλ para algum λ ∈ Λ ,
n
o
Bλ = x ; x ∈ Bλ para todo λ ∈ Λ .
(1.1)
Exemplo 1: Famı́lia finita de conjuntos: Λ = {1, 2, . . . , k}. Neste
caso denotamos:
[
Aλ =
k
[
λ∈Λ
i=1
\
k
\
λ∈Λ
Aλ =
i=1
Ai = A1 ∪ A2 ∪ · · · ∪ Ak ,
Ai = A1 ∩ A2 ∩ · · · ∩ Ak .
Conjuntos e Funções
3
Exemplo 2: Famı́lia infinita enumerável de conjuntos: Λ = N. Neste
caso denotamos:
[
Aλ =
λ∈Λ
\
Aλ =
λ∈Λ
∞
[
i=1
∞
\
i=1
Ai = A1 ∪ A2 ∪ · · · ∪ Ak ∪ · · · ,
Ai = A1 ∩ A2 ∩ · · · ∩ Ak ∩ · · · .
Exemplo 3: Há frequentemente situações em que precisamos formar
uniões ou interseções de famı́lias infinitas não enumeráveis de conjuntos. A tı́tulo de exemplo, consideremos Λ = [0, 1] e Aλ = ]λ−1, λ+1[.
Neste caso, é fácil ver que (verifique!)
[
\
Aλ = ] − 1, 2[ e
Aλ = ]0, 1[.
λ∈Λ
λ∈Λ
• Diferença e Complementar
Dados dois conjuntos A e B, definimos
A \ B = x ; x ∈ A e x 6∈ B .
Quando A ⊃ B, dizemos que A\B é o complementar de B em relação
a A e denotamos B c = A \ B.
A notação de complementar traz ambiguidade, posto que o sı́mbolo
c
B não indica em relação a quem se está tomando o complementar.
Por exemplo, se C ⊂ B ⊂ A, então quem é C c ?
Portanto, restringimos a notação de complementar somente aos
casos em que os conjuntos que consideramos são todos subconjuntos
de uma dado universo U. Isto é, denotamos por C c = U \ C.
É imediato verificar as seguintes propriedades básicas:
◦
◦
◦
◦
◦
(A ∪ B) \ C = (A \ C) ∪ (B \ C);
(A ∩ B) \ C = (A \ C) ∩ (B \ C);
(A ∪ B)c = Ac ∩ B c ;
(A ∩ B)c = Ac ∪ B c ;
A \ B = A ∩ Bc.
4
Cálculo Avançado I
• Produto Cartesiano
Dados dois conjuntos A e B, definimos
A × B = (x, y) ; x ∈ A e y ∈ B .
Podemos observar que A × B = ∅ se e somente se A = ∅ ou B = ∅.
De um modo geral, se A1 , A2 , . . . , Ak é uma famı́lia finita de conjuntos, então definimos
k
Y
i=1
Ai = A1 × · · · × Ak = (x1 , . . . , xk ) ; xi ∈ Ai , i = 1, . . . , k .
É fácil ver que A1 ×· · ·×Ak = ∅ se e somente se existe i ∈ {1, 2, . . . , k}
tal que Ai = ∅. Em particular, se A1 = . . . = Ak = A, denotamos
A × · · · × A = Ak .
Mais geralmente ainda, se Ai i∈N é uma famı́lia enumerável de
conjuntos, podemos definir o produto cartesiano (infinito):
∞
Y
i=1
Ai = A1 × A2 × · · · = (x1 , x2 , x3 , . . .) ; xi ∈ Ai , i = 1, 2, 3, . . . .
Observe também que se A1 = A2 = . . . = A, então A1 × A2 × · · · é o
conjunto de todas as sequências (x1 , x2 , . . .) de elementos de A.
Notação: A × A × · · · = AN .
Exemplo: RN é o conjunto de todas as sequências de números reais.
Nota: Como se poderia definir o produto cartesiano de uma famı́lia
infinita arbitrária de subconjuntos
Y
Aλ ?
λ∈Λ
É possı́vel tal generalização? Em caso afirmativo, o que é R[0,1] ?
Pense nisso!
Conjuntos e Funções
5
Funções
Definição 1.1: Sejam A e B dois conjuntos. Dizemos que f é uma
função de A em B se f ⊂ A × B é tal que:
∀x ∈ A, ∃ um único y ∈ B tal que (x, y) ∈ f.
(1.2)
Notação: Se f é uma função de A em B, então A é denominado o
domı́nio de f , B o contra-domı́nio e escrevemos
f : A → B.
Além disso, se (x, y) ∈ f , então denotamos y = f (x).
Definição 1.2: Se f : A → B é uma função e A1 ⊂ A e B1 ⊂ B,
definimos:
f (A1 ) = y ∈ B ; ∃x ∈ A1 , y = f (x) ,
f −1 (B1 ) = x ∈ A ; f (x) ∈ B1 .
f (A1 ) é denominado imagem de A1 por f e f −1 (B1 ) é denominado
imagem inversa de B1 por f .
Observação: Segue da definição que se f é uma função de A em B,
então para todo x ∈ A, f ({x}) é subconjunto unitário de B.
Observação: Embora o conceito formal de função dada pela Definição 1.1 só leve em consideração o conceito básico de conjunto,
é muitas vezes conveniente interpretar uma função f : A → B como
uma “regra” que associa (que transforma) elementos de A a (em)
elementos de B. Assim, no dicionário matemático, aplicação e transformação são sinônimos da palavra função.
A
f
B
6
Cálculo Avançado I
Definição 1.3: Dizemos que uma função f : A → B é injetora se
x1 , x2 ∈ A são tais que f (x1 ) = f (x2 ), então x1 = x2 . Dizemos que
f é sobrejetora se para todo y ∈ B existe x ∈ A tal que y = f (x).
Em particular, f é dita bijetora se for injetora e sobrejetora.
A definição acima pode ser sintetizada da seguinte forma: uma
função f : A → B é sobrejetora se f (A) = B. Ela é injetora se, para
todo y ∈ B, f −1 ({y}) ou é um subconjunto unitário de A ou é vazio.
E f é bijetora se, para todo y ∈ B, f −1 ({y}) é um subconjunto
unitário de A.
Definição 1.4: Dizemos que uma função f : A → B é invertı́vel se o
conjunto
g = (y, x) ∈ B × A ; (x, y) ∈ f
é uma função de B em A. Neste caso, dizemos que g é a inversa de
f e a denotamos por f −1 .
Como consequência imediata das definições acima temos o seguinte
resultado, cuja demonstração deixamos como exercı́cio.
Lema 1.5: Uma função f : A → B é invertı́vel se e somente se é
bijetora.
Composição de funções
Se f : A → B e g: B → C são funções, podemos definir a função
composta g ◦ f : A → C por (g ◦ f )(x) = g f (x) , ∀x ∈ A. Mais
precisamente, como f é função, para cada x ∈ A existe um único
y = f (x) ∈ B tal que (x, y) ∈ f . Como g é função, existe um único
z = g(y) = g(f (x)) ∈ C tal que (y, z) ∈ g. Portanto, o conjunto
g ◦ f = (x, z) ∈ A × C ; z = g(f (x))
satisfaz a propriedade (1.2). É, portanto, uma função, que definimos
como função composta de g com f .
f
A
g
B
g◦f
C
Conjuntos e Funções
7
Sequências
Definição 1.6: Seja A um conjunto. Uma sequência em A é uma
função ϕ: N → A.
Embora formalmente uma sequência seja uma função, é usual identificarmos a sequência ϕ com sua imagem {ϕ(1), ϕ(2), . . .} em A.
Podemos, em particular, interpretar um ponto de A como uma sequência (função) constante.
As sequências podem ser construı́das explicitamente, quando a
função ϕ é dada de forma explı́cita, ou por recorrência, quando cada
termo é obtido de termos anteriores. Por exemplo, a sequência de
números naturais {1, 3, 7, 15, . . .} pode ser definida explicitamente por
ϕ(n) = 2n − 1, ou pela recorrência x1 = 1 e xn+1 = 2xn + 1, n ≥ 1.
Além das aplicações onde aparecem naturalmente, as sequências
são úteis como ferramentas de demonstração, mas sua essência está
na caracterização da enumerabilidade, que permite diferenciar “tipos
de infinito”.
Definição 1.7: Um conjunto A é dito enumerável se existe uma
sequência ϕ: N → A bijetora.
Exercı́cios
Exercı́cio 1.1. Mostre que o cojunto vazio é único.
Exercı́cio
1.2. Seja
S
T Λ = ]0, 1[ e Aλ = [λ − 2, λ + 2], ∀λ ∈ Λ. Determine λ∈Λ Aλ e λ∈Λ Aλ .
S
Exercı́cio 1.3. Considere os conjuntos A = λ∈Λ Aλ e B =
S
λ∈Λ Bλ , onde Λ = [0, 1[ e
Aλ = (x, y) ∈ R2 ; (x − λ)2 + y 2 ≤ λ2 /2 ,
Bλ = (x, y) ∈ R2 ; (x − λ)2 + y 2 = λ2 /2 .
Mostre que A = B. Faça um esboço gráfico de A.
Exercı́cio 1.4. Prove o Lema 1.5.
8
Cálculo Avançado I
Exercı́cio 1.5. Dados A, B e C conjuntos, {Aα } e {Bβ } duas famı́lias
de conjuntos, mostre que:
[ [ [
a)
Aα ∩
Bβ =
(Aα ∩ Bβ ).
α
b)
\
α
Aα
β
∪
\
β
c
c) A \ B = A ∩ B .
Bβ
α,β
=
\
α,β
(Aα ∪ Bβ ).
d) se A ⊂ B então B c ⊂ Ac .
[ c \
\ c [
c
e)
Aα =
Aα , e
Aα =
Acα .
α
α
α
α
f) A ∩ (B \ C) = (A ∩ B) \ (A ∩ C).
g) (A ∩ B) \ C = (A \ C) ∩ (B \ C).
h) Valem as duas últimas identidades acima substituindo-se ∩ por
∪?
i) A × (B ∪ C) = (A × B) ∪ (A × C).
j) A × (B ∩ C) = (A × B) ∩ (A × C).
k) A × (B \ C) = (A × B) \ (A × C).
Exercı́cio 1.6. Sejam f : X −→ Y uma função, A ⊂ X, B ⊂ Y ,
{Aα }α famı́lia de subconjuntos de X e {Bβ }β famı́lia de subconjuntos
de Y . Mostre que:
S S
a) f −1
Bβ = f −1 (Bβ ).
T T
b) f −1
Bβ = f −1 (Bβ ).
c
c) f −1 (B c ) = f −1 (B) .
S S
d) f
Aα = f (Aα ).
T T
e) f
Aα ⊂ f (Aα ).
f) Dê um exemplo para o qual não vale a igualdade no item (e).
c
g) Verifique
c que em geral não há nenhuma relação entre f (A ) e
f (A) .
h) f f −1 (B) ⊂ B e f −1 f (A) ⊃ A, não valendo, em geral, as
Conjuntos e Funções
9
igualdades nos dois casos. Dê condições
sobre f para
que sejam
válidas as igualdades f f −1 (B) = B e f −1 f (A) = A.
Exercı́cio 1.7. Seja A = {0, 1, 2, . . . , 9}. Considere a função Φ assim
definida
N
Φ : A → [0, 1],
∞
X
an
Φ(a1 , a2 , a3 , . . .): =
.
10n
n=1
Mostre que Φ não é injetiva e que se Φ(a) = Φ(b) para a 6= b, então
Φ(a) ∈ Q ∩ [0, 1].
2
Métricas e Normas
Para medir distâncias entre pontos de um dado conjunto A, devemos
considerar uma função que a cada dois elementos x e y de A associe um número real positivo, denominado distância de x a y. Tal
função deve satisfazer as propriedades usuais da distância euclidiana
definidas para pontos do plano.
Denominamos métricas as funções que permitem “medir distâncias”
entre pontos de um dado conjunto A. Mais precisamente.
Definição 2.1: Seja X um dado conjunto. Uma métrica em X
é qualquer função d: X × X → R que satisfaça as seguintes propriedades:
i) d(x, y) ≥ 0, ∀x, y ∈ X;
ii) d(x, y) = 0 ⇐⇒ x = y;
iii) d(x, y) = d(y, x), ∀x, y ∈ X;
iv) d(x, y) ≤ d(x, z) + d(z, y), ∀x, y, z ∈ X.
Exemplo 1: Seja d: R2 × R2 → R definida por
p
d(x, y) = (x1 − y1 )2 + (x2 − y2 )2 ,
onde x = (x1 , x2 ) e y = (y1 , y2 ). Então d é métrica em R2 .
Exemplo 2: A Definição 2.1 é geral o suficiente para que se “possa
medir distâncias” num conjunto qualquer não vazio. De fato, se X é
um conjunto qualquer não vazio, defina d: X × X → R por
1 se x 6= y
d(x, y) =
0 se x = y
12
Cálculo Avançado I
Então d é métrica em X.
No caso em que X é um espaço vetorial, podemos medir distâncias
por intermédio de normas, que são funções que permitem “medir
comprimentos”.
Definição 2.2: Seja V um espaço vetorial. Uma norma em V é
qualquer função k k: V → R que satisfaça as seguintes propriedades:
i) kxk ≥ 0, ∀x ∈ V ;
ii) kxk = 0 ⇐⇒ x = 0;
iii) kλxk = |λ|kxk, ∀λ ∈ R e ∀x ∈ V ;
iv) kx + yk ≤ kxk + kyk, ∀x, y ∈ V .
A desigualdade em iv) é denominada desigualdade triangular.
Observação: É fácil ver das definições acima que toda norma num
espaço vetorial induz uma métrica nesse espaço. De fato, se k k é
uma norma num espaço vetorial V , então d(x, y) = kx − yk é uma
métrica em V . Por outro lado, nem toda métrica induz uma norma
(dê um exemplo!).
Lema 2.3: Se k k é uma norma em V , então para todo x, y ∈ V
temos
kxk − kyk ≤ kx + yk
e
kxk − kyk ≤ kx − yk.
Prova: Da desigualdade triangular, kxk = kx + y − yk ≤ kx + yk +
k − yk = kx + yk + kyk. Logo
kxk − kyk ≤ kx + yk.
(2.1)
Analogamente, kyk = ky−x+xk ≤ kx+yk +k−xk = kx+yk +kxk,
de onde se obtém
kyk − kxk ≤ kx + yk.
(2.2)
As desigualdades (2.1) e (2.2) nos fornecem a primeira conclusão:
kxk − kyk ≤ kx + yk.
A segunda segue por argumento análogo.
Métricas e Normas
13
Definição 2.4: Seja V um espaço vetorial e k k∗ , k k∗∗ duas normas
definidas em V . Dizemos que estas normas são equivalentes se:
∃a, b > 0 tais que akxk∗ ≤ kxk∗∗ ≤ bkxk∗ , ∀x ∈ V.
Espaços vetoriais com produto interno
A estrutura métrica em espaços vetoriais introduzidas pelas normas
não permite explorar aspectos geométricos importantes, tais como
ortogonalidade, ou mais geralmente, ângulo entre vetores. Se esses
conceitos são importantes, precisamos equipar o espaço com uma
outra estrutura. Nos espaços vetoriais reais, essa nova estrutura é
obtida pelo produto interno ou produto escalar.
Definição 2.5: Seja V um espaço vetorial real. Um produto interno
definido em V é qualquer aplicação p : V × V → R satisfazendo as
seguintes propriedades:
i) p(x + λy, z) = p(x, z) + λp(y, z), ∀x, y, z ∈ V , ∀λ ∈ R.
ii) p(x, y) = p(y, x), ∀x, y ∈ V ;
iii) p(x, x) > 0, ∀x ∈ V , x 6= 0;
Da definição acima se depreende que um produto interno é qualquer
forma bilinear simétrica positiva definida em V . É usual denotarmos
um dado produto interno pela expressão hx : yi
Exemplo 3: Se x = (x1 , . . . , xn ) e y = (y1 , . . . , yn ) são vetores de
Rn , a forma bilinear definida por
hx : yi =
n
X
xi y i .
i=1
é um produto interno, denominado produto escalar usual ou canônico.
Proposição 2.6: Seja V um espaço vetorial real munido de um
produto interno h : i. Então vale a seguinte desigualdade, denominada
Desigualdade de Cauchy-Schwarz:
|hx : yi| ≤
p
hx : xihy : yi
(2.3)
14
Cálculo Avançado I
Prova: Para x, y ∈ V , considere a aplicação f : R → R definida por
f (λ) = hx − λy : x − λyi. Pelas propriedades que definem o produto
interno, podemos escrever
0 ≤ f (λ) = hx : xi − 2λhx : yi + λ2 hy : yi.
Portanto, f é um polinômio do segundo grau com discriminante
menor ou igual a zero, isto é,
4hx : yi2 − 4hx : xihy : yi ≤ 0,
de onde se conclui de imediato a desigualdade (2.3).
Corolário 2.7: Seja V um espaço vetorial real munido de um produto interno h : i. Então a aplicação k k: V → R definida por kxk =
p
hx : xi é uma norma em V
Prova: As propriedades (i)–(iii) são óbvias a partir da definição.
Provemos (iv). Por (2.3), temos
kxk + kyk
2
= kxk2 + 2kxkkyk + kyk2
≥ kxk2 + 2hx : yi + kyk2 = kx + yk2
Normas em Rn
Sabemos que o conjunto Rn , munido das operações usuais de soma
e produto por escalar, é um espaço vetorial de dimensão n.
As expressões abaixo definem normas equivalentes em Rn : se x =
(x1 , x2 , . . . , xn ) ∈ Rn ,
kxk1 =|x1 | + |x2 | + · · · + |xn |,
p
kxk2 = |x1 |2 + |x2 |2 + · · · + |xn |2 ,
kxk∞ = max{|x1 |, |x2 |, . . . , |xn |}.
Mais geralmente,
Teorema 2.8: Se 1 ≤ p < +∞, então
1/p
kxkp = |x1 |p + |x2 |p + · · · + |xn |p
Métricas e Normas
15
é uma norma em Rn .
A demonstração deste resultado faz uso da Desigualdade de Young,
que enunciamos e demonstramos a seguir.
Lema 2.9: Sejam p e q tais que 1 < p, q < +∞ e 1/p + 1/q = 1.
Então, para todo x, y ∈ R, vale a desigualdade
|xy| ≤
|y|q
|x|p
+
.
p
q
Prova: A função real t 7→ ln t é côncava e crescente. Portanto, para
todo α e β positivos,
ln λα + (1 − λ)β ≥ λ ln α + (1 − λ) ln β, ∀λ ∈ ]0, 1[.
Considerando λ = 1/p, temos 1 − λ = 1/q e consequentemente
ln
1
1 1
1
α + β ≥ ln α + ln β = ln α1/p β 1/q ,
p
q
p
q
e obtemos o resultado, considerando |x|p = α e |y|q = β.
Como consequência do lema acima, temos a Desigualdade de Hölder:
Corolário 2.10: Sejam p e q tais que 1 < p, q < +∞ e 1/p+1/q = 1.
Então, para todo x, y ∈ Rn , vale a desigualdade
|hx : yi| ≤ kxkp kykq .
Prova: Se x = (x1 , . . . , xn ) e y = (y1 , . . . , yn ), obtemos da desigualdade de Young,
hλx : yi ≤
n
X
i=1
λ|xi ||yi | ≤
n p
X
λ
i=1
1
q
|xi | + |yi | , ∀λ > 0. (2.4)
p
q
p
Dividindo ambos os lados de (2.4) por λ, obtemos
hx : yi ≤
n p−1
X
λ
i=1
1
q
|xi | +
|yi | , ∀λ > 0.
p
λq
p
(2.5)
16
Cálculo Avançado I
Para x e y fixos, o lado direito da desigualdade (2.5) define uma
função na variável λ ∈ ]0, +∞[, isto é:
ϕ(λ) =
λp−1
1
kxkpp +
kykqq .
p
λq
Portanto, decorre de (2.5) que hx : yi ≤ minλ>0 ϕ(λ). Calculando
o valor mı́nimo de ϕ(λ) (veja exercı́cio), obtemos o resultado.
Nota: A desigualdade de Hölder no caso p = 2 coincide com a
Desigualdade de Schwarz. De fato, neste caso a norma é a induzida
pelo produto interno usual.
Passemos, então, à demonstração do Teorema 2.8.
Prova: Basta mostrar a desigualdade triangular, as outras propriedades sendo imediatas.
Se x = (x1 , . . . , xn ) e y = (y1 , . . . , yn ), temos da definição,
kx +
ykpp
=
n
X
i=1
p
|xi + yi | ≤
n
X
i=1
|xi ||xi + yi |
p−1
+
n
X
i=1
|yi ||xi + yi |p−1 .
Considerando os vetores
a = (|x1 |, . . . , |xn |), b = (|y1 |, . . . , |yn |) e
c = (|x1 + y1 |p−1 , . . . , |xn + yn |p−1 ),
podemos expressar a desigualdade acima na forma
kx + ykpp ≤ ha : ci + hb : ci.
Decorre, então, da desigualdade de Hölder,
kx + ykpp ≤ ha : ci + hb : ci ≤ kakp kckq + kbkp kckq .
Observando que
kakp = kxkp ,
kbkp = kykp ,
kckq = kx + ykp/q
= kx + ykp−1
,
p
p
obtemos
kx + ykpp ≤ kxkp kx + ykp−1
+ kykp kx + ykp−1
p
p
e o resultado decorre da simplificação.
Métricas e Normas
17
Exemplos de espaços vetoriais normados
Além do Rn , há outros espaços vetoriais que desempenham papel
relevante na Análise. Há os que são isomorfos ao Rn , e nesse caso,
todos os resultados da Análise que se obtém para este se estendem
naturalmente àqueles via os isomorfismos que os identificam. Mas há
também os que não são isomorfos ao Rn , que são necessariamente de
dimensão infinita. Vejamos alguns exemplos.
• Espaços Vetoriais de Polinômios
Seja V = Pn o conjunto dos polinômios reais de grau menor ou igual
a n, munido das operações usuais de soma de polinômios e produto
por escalar. Então V é espaço vetorial de dimensão n + 1.
As expressões abaixo definem normas equivalentes em V : se P (x) =
a 0 + a 1 x + a 2 x2 + · · · + a n xn ,
kP kp =
kP k∞
n
X
i=0
|ai |p
!1/p
p ∈ [1, +∞[,
.
= max |ai | ; i = 0, . . . , n
• Espaços Vetoriais de Matrizes
Seja V = Mm×n o conjunto das matrizes a coeficientes reais de
ordem m × n, munido das operações usuais de soma de matrizes e
produto por escalar. Então V é espaço vetorial de dimensão mn.
As expressões abaixo definem normas equivalentes em V: se
a11
a21
A=
...
am1
a12
a22
..
.
...
...
..
.
am2
. . . amn
1/p
n
m
XX
kAkp =
|aij |p
i=1 j=1
a1n
a2n
..
.
,
p ∈ [1, +∞[,
kAk∞ = max |aij | ; i = 1, . . . , m, j = 1, . . . , n .
(2.6)
18
Cálculo Avançado I
Observação: A semelhança nas definições das normas k kp , com
p ∈ [1, +∞], definidas acima nos remete à ideia de construir normas
em espaços vetoriais de dimensão n a partir de normas conhecidas
em Rn . De fato, considerando o exemplo dos polinômios, se T : Pn →
Rn+1 é a aplicação definida por T (P ) = (a0 , a1 , . . . , an ), então T é um
isomorfismo, isto é, uma aplicação bijetora que preserva as estruturas
algébricas (estruturas de espaços vetoriais) de Pn e Rn+1 . Além disso,
é fácil ver que
kP kp = kT (P )kp ∀P ∈ Pn ,
onde k kp representa respectivamente norma em Pn e Rn+1 . Este
exemplo se generaliza facilmente, como se pode verificar com o seguinte resultado.
Teorema 2.11: Sejam V e W dois espaços vetoriais de dimensão
n e T : V → W um isomorfismo. Se k kW é norma em W , então a
expressão
kvkV = kT (v)kW
(2.7)
define uma norma em V . Além disso, se k kα e k kβ são normas
equivalentes em W , então as normas de V definidas pela relação (2.7)
são normas equivalentes em V .
Nota: Afirmamos em cada um dos exemplos acima que todas as
normas k kp são equivalentes. Na verdade, e veremos adiante, se
V é espaço vetorial de dimensão finita, então todas as normas são
equivalentes. Ainda mais geralmente, podemos provar que um espaço
vetorial V é de dimensão finita se e somente se todas as normas são
equivalentes.
Vejamos um exemplo de espaço vetorial de dimensão infinita.
• Espaços Vetoriais de Funções Contı́nuas:
Seja V = C [a, b]; R o conjunto das funções reais contı́nuas definidas em [a, b], munido das operações usuais de soma de funções e
produto por escalar. Então V é espaço vetorial de dimensão infinita.
As expressões abaixo definem normas em V :
!1/p
Z b
kf kp =
|f (x)|p dx
, p ∈ [1, +∞[
a
kf k∞ = max |f (x)| ; x ∈ [a, b] .
Métricas e Normas
19
Exercı́cios
Exercı́cio 2.1. Seja x = (x1 , · · · , xn ) ∈ Rn . Mostre que cada uma
das expressões abaixo define uma norma em Rn .
n
X
1) kxk1 =
|xi |.
i=1
2) kxk∞ = max{|x1 |, · · · , |xn |}.
Exercı́cio 2.2. Faça os detalhes da prova do Corolário 2.10.
Exercı́cio 2.3. Seja x ∈ Rn . Mostre que lim kxkp = kxk∞ .
p→∞
Exercı́cio 2.4. Sejam k kα , k kβ e k kγ normas num espaço vetorial
V . Se k kα e k kβ são equivalentes e k kβ e k kγ são equivalentes,
mostre que k kα e k kγ são equivalentes.
Exercı́cio 2.5. Sejam p1 , p2 ∈ [1, ∞]. Mostre que as normas k kp1
e k kp2 de Rn são equivalentes.
Exercı́cio 2.6. Demonstre o Teorema 2.11.
Exercı́cio 2.7. Mostre que as normas definidas em C [0, 1]; R por
Z 1
kf k1 =
|f (x)| dx,
kf k∞ = max |f (x)| ; x ∈ [0, 1]
0
não são equivalentes.
Exercı́cio 2.8.
a) Seja A matriz n × n positiva-definida (isto é, hAx : xi > 0, ∀x ∈
Rn , x 6= 0) e simétrica (isto é, hAx : yi = hx : Ayi, ∀x, y ∈ Rn ),
onde h : ipdenota o produto escalar usual de Rn . Mostre que
kxkA = hAx : xi é uma norma em Rn .
b) Seja B matriz n×n positiva-definida
(não necessariamente simép
trica). Mostre que kxkB = hBx : xi é uma norma em Rn .
c) Sejam A e B matrizes
p simétricas e positivas tais que AB = BA.
Mostre que kxk = hAx : Bxi é uma norma em Rn .
Exercı́cio 2.9. Considere V = Mm×n o espaço vetorial das matrizes de ordem m × n. Para A, B ∈ V , seja
A : B = tr(AT B),
20
Cálculo Avançado I
onde AT é a matriz transposta de A e tr(AT B) denota o traço da
matriz quadrada AT B, isto é, a soma dos elementos da diagonal
principal.
a) Mostre que : define um produto interno em V .
q
b) Verifique que
A : A = kAk2 , onde k k2 é a norma definida
por (2.6) para p = 2.
c) Se m = n, mostre que kABk2 ≤ kAk2 kBk2
Exercı́cio 2.10. Para cada k ∈ N seja fk : [0, 1] → R, fk (x) = xn .
Mostre que o conjunto X = f1 , f2 , f3 , . . . é linearmente independente e conclua que C [0, 1]; R tem dimensão infinita.
Exercı́cio 2.11. Seja X um conjunto e f : X → Rn uma função.
Mostre que
sup kf (x)k2 − inf kf (x)k2 ≤
x∈X
x∈X
n X
sup fi (x) − inf fi (x) ,
i=1 x∈X
x∈X
onde k k2 denota a norma 2 de Rn .
Sugestão: Seja g: X → R uma função real. Mostre que
sup |g(x)| − inf |g(x)| ≤ sup g(x) − inf g(x)
x∈X
x∈X
x∈X
x∈X
3
Abertos, Fechados, Compactos
Neste capı́tulo introduzimos os conceitos básicos e os principais resultados da Topologia dos Espaços Normados, com ênfase aos espaços
de dimensão finita e, especialmente, o espaço Rn .
Seja V um espaço vetorial munido de uma norma k k, x0 ∈ V e
r > 0. O conjunto
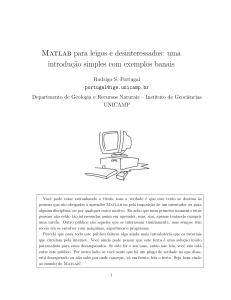
Br (x0 ) = x ∈ V ; kx − x0 k < r
é denominado bola aberta de centro em x0 e raio r.
A Fig. 3.1 abaixo ilustra bolas de R2 relativas a normas k kp para
alguns valores de p.
p=1
p = 3/2
p=2
p=4
p=∞
Figura 3.1
O conceito de bola aberta nos permite intruduzir diversas definições, alicerces para a construção da Análise. Iniciemos com os conceitos de ponto interior e ponto de acumulação.
Definição 3.1: Seja A um subconjunto de V e x0 ∈ V .
22
Cálculo Avançado I
a) Dizemos que x0 é ponto interior de A se existe r > 0 tal que
Br (x0 ) ⊂ A.
b) Dizemos que x0 é ponto de acumulação de A se para todo r > 0,
Br (x0 ) \ {x0 } ∩ A 6= ∅.
Observe que se x0 é ponto de acumulação de A, podemos tomar
pontos de A tão próximos de x0 quanto se queira. Se x0 é ponto
interior de A, então x0 é ponto de acumulação e pertence a A. Além
disso, podemos aproximar x0 por pontos de A “em qualquer direção”.
Se x0 ∈ A não pode ser aproximado por outros pontos de A, dizemos que x0 é ponto isolado de A. Mais precisamente, x0 é ponto
isolado de A se existe r > 0 tal que Br (x0 ) ∩ A = {x0 }.
O conjunto de todos os pontos interiores de A é denominado interior
◦
de A, denotado por A:
◦
A= x ∈ A ; x é ponto interior de A .
O cojunto dos pontos de acumulação de A é denominado derivado de
A, denotado por A′ :
A′ = x ∈ V ; x é ponto de acumulaçãode A .
◦
Nota: Observe que é imediato verificar que A⊂ A′ e que A \ A′ é o
conjunto dos pontos isolados de A.
Definição 3.2: Dizemos que um subconjunto A de V é aberto se
◦
todos os seus pontos são pontos interiores, isto é, A =A.
Proposição 3.3: A união qualquer de conjuntos abertos é um conjunto aberto. A interseção finita de conjuntos abertos é um conjunto
aberto.
S
Prova: Seja {Aα }α uma famı́lia de conjuntos abertos e x ∈ α Aα .
Então existe ı́ndice α0 tal que x ∈ Aα0 . Como Aα0 é aberto, existe
r > 0 tal que Br (x) ⊂ Aα0 . Portanto
[
Br (x) ⊂ Aα0 ⊂
Aα .
α
Abertos, Fechados, Compactos
23
Tk
Por outro lado, se x ∈ i=i Ai , então x ∈ Ai para todo i. Como
cada Ai é aberto, existe ri > 0 tal que Bri (x) ⊂ Ai . Seja r =
min{r1 , . . . , rk }. Então Br (x) ⊂ Ai , para todo i = 1, . . . , k e
Br (x) ⊂
k
\
Ai .
i=1
Definição 3.4: Dizemos que um subconjunto A de V é limitado se
existe r > 0 tal que A ⊂ Br (0).
Definição 3.5: Dizemos que A ⊂ V é um conjunto fechado se Ac é
aberto.
Proposição 3.6: A interseção qualquer de conjuntos fechados é um
conjunto fechado. A união finita de conjuntos fechados é um conjunto
fechado.
Prova: Seja {Fλ }λ uma famı́lia qualquer de conjuntos fechados.
Então {Fλc }λ é uma famı́lia de conjuntos abertos. Como a união
de conjuntos abertos é aberto, segue que
\
Fλ
λ
!c
=
[
Fλc
λ
T
é um conjunto aberto. Portanto λ Fλ é conjunto fechado.
Analogamente, como a interseção finita de conjuntos abertos é um
conjunto aberto, segue que
k
[
i=1
Fi
!c
é um conjunto fechado. Portanto
=
k
\
Fic
i=1
Sk
i=1
Fi é conjunto aberto.
Definição 3.7: A = A′ ∪ A é denominado aderência ou fecho de A.
Proposição 3.8: A é fechado se e somente se A = A.
Prova: Veja exercı́cios.
24
Cálculo Avançado I
Conjuntos compactos
Definição 3.9: Uma famı́lia {Aλ }λ∈Λ de subconjuntos de V é denominada cobertura de um dado conjunto B se
B⊂
[
Aλ .
λ
Se Aλ é conjunto aberto para todo λ ∈ Λ, dizemos que a cobertura é
aberta. Se Λ é conjunto finito, dizemos que a cobertura é finita.
Definição 3.10: Um conjunto K ⊂ V é compacto se toda cobertura
aberta de K admite subcobertura finita, isto é, se {Aλ }λ∈Λ é uma
cobertura aberta de K, então existem λ1 , . . . , λk tais que
K ⊂ Aλ1 ∪ · · · ∪ Aλk .
Proposição 3.11: Todo conjunto compacto é fechado e limitado.
Prova: Seja K compacto. Provemos inicialmente que K é limitado.
A famı́lia {B1 (x)}x∈K é uma cobertura aberta de K. Logo, existem
x1 , x2 , . . . xm ∈ K tais que
K⊂
m
[
B1 (xi ).
i=1
Seja r̄: = max{kx1 k, . . . , kxm k} + 1. Afirmo que Br̄ (0) ⊃ K. Com
efeito, se x ∈ K, então x ∈ B1 (xi ) para algum i = 1, . . . , m. Assim
kxk = kx + xi − xi k ≤ kx − xi k + kxi k < 1 + kxi k ≤ r̄.
Provemos que K é fechado, isto é, que K c é aberto. Seja x0 ∈ K c .
Para cada x ∈ K considere rx = 12 kx − x0 k. Então {Brx (x)}x∈K é
uma cobertura aberta de K. Sendo K compacto, podemos encontrar
x1 , x2 , . . . , xm tais que
K⊂
m
[
i=1
Brxi (xi ).
(3.1)
Abertos, Fechados, Compactos
25
Seja r̄: = min{rx1 , rx2 , . . . , rxm } > 0. Afirmo que Br̄ (x0 ) ⊂ K c . De
fato, pela definição de r̄ temos
Br̄ (x0 ) =
m
\
Brxi (x0 ).
i=1
Passando ao complementar em (3.1) temos
c
K ⊃
m
\
i=1
c
Brxi (xi ) ⊃
m
\
Brxi (x0 ) = Br̄ (x0 ).
i=1
Proposição 3.12: Seja F ⊂ K ⊂ V , com F fechado e K compacto.
Então F é compacto.
Prova: Seja {Gα }α∈Λ uma cobertura aberta de F . Então é fácil ver
que {Gα ∪ F c }α∈Λ é cobertura aberta de K. Como K é compacto,
existem α1 , α2 , . . . , αm ∈ Λ tais que
K⊂
m
[
i=1
m
[
Gαi ∪ F c .
Gαi ∪ F c =
i=1
Como F ⊂ K, segue que
F ⊂
m
[
Gαi .
i=1
Observação: Todas as definições e resultados apresentados até aqui
neste capı́tulo são relativos à norma fixada no espaço vetorial V . Não
é difı́cil observar, porém, que essas definições e resultados são invariantes para outras normas equivalentes de V . Vejamos, por exemplo,
o caso de ponto interior. Sejam k kα e k kβ duas normas equivalentes de V e x0 um ponto interior de A ⊂ V relativamente à norma
α. Então, x0 também é ponto interior de A relativamente à norma β.
Com efeito, como as normas são equivalentes, existem números reais
positivos m e M tais que
mkxkα ≤ kxkβ ≤ M kxkα ,
∀x ∈ V.
26
Cálculo Avançado I
Como x0 é ponto interior de A relativamente à norma α, existe r > 0
1
tal que se kx−x0 kα < r, então x ∈ A. Como kx−x0 kα ≤ m
kx−x0 kβ ,
para todo x ∈ V , segue que se kx − x0 kβ < mr, então x ∈ A e
concluı́mos que x0 é ponto interior de A relativamente à norma β.
Isso pode ser resumido pela afirmação de que as topologias geradas
por normas equivalentes de V são idênticas.
Observação: Uma caracterização importante dos espaços de dimensão finita (além da que se refere à equivalência das normas), é
a recı́proca da Proposição 3.11: se V é espaço vetorial de dimensão
finita, então todo conjunto fechado e limitado é compacto. É o que
demonstraremos a seguir para o espaço Rn .
Compactos de Rn
Para caracterizar os conjuntos compactos de Rn , consideremos os
seguintes resultados.
Lema 3.13: Seja {Ik }k∈N uma famı́lia de intervalos fechados e limitados de R tais que I1 ⊃ I2 ⊃ . . .. Então
∞
\
k=1
Ik 6= ∅.
Prova: Se Ik = [ak , bk ], segue da hipótese que
a 1 ≤ a 2 ≤ . . . ≤ a k ≤ . . . ≤ bk ≤ . . . ≤ b2 ≤ b1 .
Logo {ak } é sequência crescente e limitada e {bk } é sequência decrescente e limitada. Portanto (veja Análise Real) ak −→ α e bk −→ β
quando k → ∞ e
∞
\
[α, β] ⊂
Ik .
k=1
Definição 3.14: Chama-se n-pavê todo conjunto P ∈ Rn da forma
P =
n
Y
i=1
[ai , bi ].
Abertos, Fechados, Compactos
27
Lema 3.15: Seja {Pk }k∈N uma famı́lia de n-pavês tais que P1 ⊃
P2 ⊃ . . .. Então
∞
\
Pk 6= ∅.
k=1
Qn
Prova: Pk =
i=1 [ai,k , bi,k ]. Como P1 ⊃ P2 ⊃ . . ., segue que
Ii,k = [ai,k , bi,k ] satisfaz Ii,1 ⊃ IT
i,2 ⊃ . . . para todo i = 1, . . . , n.
∞
Logo, decorre do Lema 3.13 que k=1 Ii,k 6= ∅ e consequentemente
T
∞
k=1 Pk 6= ∅.
Teorema 3.16: (Bolzano-Weierstrass) Seja A ⊂ Rn limitado contendo uma infinidade de pontos. Então A′ 6= ∅.
Prova: A sendo limitado, existe r > 0 tal que Br (0) ⊃ A, onde Br
denota a bola aberta relativa à norma k k∞ . Seja P0 = Br (0). Então
P0 ⊃ A e
n
Y
P0 =
Ii,0 , onde Ii,0 = [−r, r].
i=1
Dividindo cada intervalo Ii,0 no ponto médio, obtemos 2n bolas fechadas de raio r/2. Como A possui infinitos pontos, alguma
Qn dessas bolas
fechadas contém infinitos pontos de A. Seja P1 = i=1 [ai,1 , bi,1 ] tal
bola.
Novamente dividindo cada intervalo [ai,1 , bi,1 ] pelo ponto médio,
obtemos 2n bolas fechadas de raio r/4. Seja P2 uma dessas bolas que
contenha infinitos pontos de A.
Repetindo o procedimento acima ad infinitum, obtemos uma famı́lia de bolas fechadas {Pk }k∈N que satisfaz
P1 ⊃ P2 ⊃ P3 ⊃ . . .
Pelo Lema 3.15, existe x̄ ∈
T
k
Pk . Provemos que x̄ ∈ A′ .
Dado δ > 0, seja k0 ∈ N tal que r/2k0 < δ/2. Como x̄ ∈ Pk para
todo k, temos Pk0 ⊂ Bδ (x̄). Como Pk0 contém infinitos pontos de A,
segue que
Bδ (x̄) ∩ A \ {x̄} 6= ∅.
Teorema 3.17: Todo n-pavê é compacto.
28
Cálculo Avançado I
Prova: Seja P =
Qn
δ=
seu diâmetro.
i=1 [ai , bi ]
p
um n-pavê e
(b1 − a1 )2 + · · · + (bn − an )2
Suponhamos que {Gα }α∈Λ seja uma cobertura aberta de P que
não admite subcobertura finita.
Os pontos médios ci = (ai + bi )/2 dos intervalos que compõem P
dividem P em 2n pavês de diâmetro δ/2. Algum desses 2n pavês não
pode ser coberto por um número finito de abertos de {Gα }. Seja P1
tal pavê.
Repetindo-se o argumento acima ad infinitum, construimos uma
famı́lia {Pk }k∈N de n-pavês, cada Pk com diâmetro δ/2k , tais que
P1 ⊃ P2 ⊃ . . .
T∞
Pelo Lema 3.15, ∃x̄ ∈ k=1 Pk ⊂ P . Portanto, ∃α0 ∈ Λ tal que
x̄ ∈ Gα0 . Como Gα0 é aberto, ∃r > 0 tal que Br (x̄) ⊂ Gα0 .
Escolhendo k ∈ N tal que δ/2k < r/2 tem-se Pk ⊂ Br (x̄) ⊂ Gα0 ,
o que é uma contradição, pois Pk não pode ser coberto por uma
quantidade finita de abertos.
Teorema 3.18: Se K é fechado e limitado de Rn , então K é compacto.
Prova: Se K limitado, então existe P n-pavê tal que K ⊂ P . Pelo
teorema anterior, P é compacto. Como K é fechado e K ⊂ P , segue
que K é compacto.
.
Os resultados seguintes fornecem uma generalização aos Lemas 3.13
e 3.15.
Teorema 3.19: Seja {Kα }α∈Λ uma famı́lia de compactos de Rn com
a propriedade da interseção finita, isto é, “toda subfamı́lia finita tem
interseção não vazia”. Então
\
Kα 6= ∅.
α∈Λ
T
Prova: Suponhamos que α∈Λ Kα = ∅ e fixe α0 ∈ Λ. Afirmo que
{Kαc }α∈Λ é cobertura aberta de Kα0 . Com efeito, se x ∈ Kα0 , segue
Abertos, Fechados, Compactos
de
T
α∈Λ
Kα = ∅ que
x∈
\
Kα
α∈Λ
29
c
=
[
Kαc .
α∈Λ
Como Kα0 é compacto, existem α1 , . . . , αm tais que
K α0 ⊂
m
[
Kαc i =
i=1
m
\
K αi
i=1
c
.
Portanto Kα0 ∩ Kα1 ∩ · · · ∩ Kαm = ∅, o que é uma contradição.
Corolário 3.20: Seja {Kk }k∈N famı́lia enumerável de compactos de
Rn tal que K1 ⊃ K2 ⊃ . . .. Então
\
Kk 6= ∅.
k∈N
Sequências em espaços vetoriais
Há muitas aplicações nas quais as sequências surgem naturalmente,
como nos métodos de discretização de equações diferenciais. Além
disso, também são úteis como ferramenta de demonstração, como
teremos oportunidade de ver neste capı́tulo.
Relembrando a definição formal introduzida no Capı́tulo 1, uma sequência de V é qualquer função ϕ: N → V . Em geral, denotamos por
{xk }k∈N (ou simplesmente {xk }) a sequência ϕ tal que ϕ(k) = xk .
Se ϕ: N → V é uma sequência de V e ψ: N → N é uma função
estritamente crescente, então ϕ ◦ ψ é denomindada subsequência da
sequência ϕ. Uma subsequência de {xk }k é usualmente denotada por
{xki }i .
Definição 3.21: Seja V um espaço vetorial normado. Dizemos que
uma sequência {xk } de V converge para x0 ∈ V se
∀ε > 0, ∃k0 ∈ N tal que se k ≥ k0 então kxk − x0 k < ε.
Se a sequência {xk } converge para x0 , denotamos
lim xk = x0 ou xk −→ x0 .
k→∞
30
Cálculo Avançado I
As seguintes propriedades são fáceis de demonstrar.
Proposição 3.22: Seja {xk } uma sequência de V e A ⊂ V .
a) se {xk } converge ⇒ o limite é único.
b) se {xk } converge ⇒ {xk } é limitada.
c) x0 ∈ A′ ⇐⇒ existe sequência {xk } de A (com xk 6= x0 para
todo k) que converge para x0 .
Prova: Exercı́cio.
Corolário 3.23: Seja A ⊂ V um conjunto fechado e {xk } uma sequência de elementos de A. Se xk −→ x0 , então x0 ∈ A.
Prova: Pela Proposição 3.22, se xk −→ x0 , então x0 ∈ A′ . Como A
é fechado, A′ ⊂ A.
O teorema seguinte estabelece uma caracterização para os compactos de um espaço vetorial normado (ou mais geralmente, de um
espaço métrico).
Teorema 3.24: Seja V um espaço vetorial normado e K ⊂ V . Então
K é compacto se e somente se toda sequência {xn }n de K possui
subsequência {xni }i tal que xni → x̄ ∈ K.
Prova: (=⇒): É claro que se {xn }n possui subsequência convergente,
então o limite pertence a K, pois K é fechado. Suponhamos então que
existe uma sequência
{xn }n que não possui subsequência convergente
e considere B = x1 , x2 , x3 , . . . . Então B ′ = ∅ e consequentemente
B é fechado. Além disso, para
cada n ∈ N existe εn > 0 tal que
Bεn (xn ) ∩ B = {xn }. Logo Bεn (xn ) n é cobertura aberta de B
que não admite subcobertura finita. Como B é compacto (como
subconjunto fechado do compacto K), temos uma contradição.
(⇐=): Suponhamos que existe {Aα }α∈Λ uma cobertura aberta de
K que não admita subcobertura finita. Para cada x ∈ K, seja
δ(x) = sup δ > 0 ; Bδ (x) ⊂ Aα , para algum α ∈ Λ .
É claro que δ(x) > 0 ∀x ∈ K. Seja
δ0 = inf δ(x) ; x ∈ K .
Abertos, Fechados, Compactos
31
Se provarmos que δ0 > 0, podemos construir uma sequência {yn }n
em K que não possui subsequência convergente.
De fato, admita por
um instante que δ0 > 0 e considere a cobertura Bδ0 (x) x∈K . É claro
que esta cobertura aberta não admite subcobertura finita, pois caso
contrário Aα também admitiria. Consideremos então a sequência
assim construı́da: considere y1 ∈ K qualquer e, para cada n ≥ 2,
escolha yn tal que
!
n−1
[
Bδ0 (yi ) .
yn ∈ K \
i=1
Então kyn − ym k ≥ δ0 para todo n, m ∈ N tais que n 6= m.
Provemos então que δ0 > 0. Segue da definição que existe uma
sequência {xn } em K tal que δ(xn ) → δ0 . Por hipótese, existe uma
subsequência {xni } que converge para algum x0 ∈ K. Seja ε0 =
δ(x0 )/2 > 0. Então existe i0 ∈ N tal que xni ∈ Bε0 (x0 ) para todo
i ≥ i0 . Logo, para algum α ∈ Λ,
Bε0 (xni ) ⊂ Bδ(x0 ) (x0 ) ⊂ Aα .
Portanto, δ(xni ) ≥ ε0 > 0, ∀i ≥ i0 e o mesmo vale para δ0 .
Sequências de Cauchy
Definição 3.25: Uma sequência {xk } de V é dita sequência de Cauchy se
∀ε > 0, ∃k0 ∈ N tal que k, l ≥ k0 ⇒ kxk − xl kV < ε.
Lema 3.26: Se {xk }k é uma sequência de Cauchy em V , então {xk }k
é limitada em V .
Prova: Seja ε = 1. Então existe k0 ∈ N tal que se k ≥ k0 , kxk −
xk0 kV < 1. Em particular, kxk kV < 1 + kxk0 kV , para todo k ≥
k0 . Assim, se M = 1 + max{kx1 kV , . . . , kxk0 −1 kV , kxk0 kV }, então
kxk kV ≤ M para todo k ∈ N.
Como decorrência imediata da desigualdade triangular, toda sequência convergente de um espaço vetorial normado é sequência de
32
Cálculo Avançado I
Cauchy. Mas a recı́proca nem sempre se verifica. Os espaços vetoriais normados para os quais todas as sequências de Cauchy são
covergentes são denominados Espaços de Banach e são fundamentais
para a Análise, pois neles ficam assegurados os processos de limite.
Sequências em Rn
Nesta seção estudaremos as sequências em Rn ; mostraremos que
Rn é espaço de Banach.
Denotamos por k k uma norma qualquer de Rn .
Se {xk }k , onde xk = (x1,k , . . . , xn,k ), é uma sequência de Rn que
converge para x0 = (x1,0 , . . . , xn,0 ), então existe ϕ: N → Rn tal que
ϕ(k) = xk . Segue em particular da Definição 3.21 e da equivalência
de normas que {xj,k }k é sequência de números reais que converge
para xj,0 .
Proposição 3.27: Toda sequência limitada de Rn possui subsequência convergente.
Prova: Se ϕ é sequência de Rn , seja A = ϕ(N).
Se A é finito, então existe uma infinidade de números naturais
k1 < k2 < · · · para os quais ϕ(k1 ) = ϕ(k2 ) = · · · e concluı́mos,
porque sequências constantes são convergentes.
Se A é infinito, segue do Teorema de Bolzano-Weierstrass 3.16 que
′
A 6= ∅ e concluı́mos o resultado pelo item (c) da Proposição 3.22.
Teorema 3.28: Rn é um espaço de Banach.
Prova: Seja {xk }k uma sequência de Cauchy de Rn . Então {xk }k
é limitada e, portanto, possui uma subsequência {xki } que converge
para x ∈ Rn . Assim, dado ε > 0 existe i0 ∈ N tal que se i ≥ i0
então kxki − xk < ε/2. Como a sequência dada é de Cauchy, existe
k0 ∈ N tal que se k, l ≥ k0 então kxk − xl k < ε/2. Portanto, se
k1 = max{k0 , ki0 } e k ≥ k1 , temos
kxk − xk ≤ kxk − xki0 k + kxki0 − xk < ε.
O Teorema a seguir complementa a caracterização dos cojuntos compactos de Rn (veja Proposição 3.11 e Teorema 3.18).
Abertos, Fechados, Compactos
33
Teorema 3.29: Seja K ⊂ Rn . Então as afirmativas abaixo são
equivalentes
a) K é compacto;
b) K é fechado e limitado;
c) Toda sequência de K possui subsequência que converge para um
ponto de K.
Prova: A equivalência entre (a) e (b) está provada pela Proposição
3.11 e Teorema 3.18. A equivalência entre (a) e (c) é consequência
do Teorema 3.24.
Exercı́cios
Exercı́cio 3.1. Sejam A e B subconjuntos de um espaço vetorial
normado V . Demonstre as afirmativas abaixo.
a) A é fechado ⇐⇒ A ⊃ A′ . Dê exemplo de A fechado tal que
A′ 6= A.
b) A′ é conjunto fechado.
c) A ⊂ B =⇒ A′ ⊂ B ′ .
d) (A ∪ B)′ = A′ ∪ B ′ .
e) A é conjunto fechado.
f) A é fechado ⇐⇒ A = A.
Exercı́cio 3.2. Sejam k k∗ e k k∗∗ duas normas equivalentes de um
espaço vetorial V .
a) Mostre que x0 é ponto de acumulação de A com relação a uma
das normas se e somente se é ponto de acumulação com relação
à outra.
b) Mostre que se A é um conjunto aberto em V em relação a k k∗ ,
se e somente se A é aberto em relação a k k∗∗ . Mostre que o
mesmo vale para conjuntos fechados e compactos.
Exercı́cio 3.3.
◦
◦
◦
◦
Se A ⊂ B, mostre que A ⊂B e A ⊂ B. Defina α(A) =A e β(B) = B.
Mostre
a) A aberto ⇒ A ⊂ α(A).
34
Cálculo Avançado I
b) B fechado ⇒ B ⊃ β(B).
◦
c) Dê exemplo de conjunto A tal que A, A, A, α(A) e β(A) sejam
todos distintos.
Exercı́cio 3.4. Seja K subconjunto compacto de um espaço vetorial
normado V . Mostre que existe A = {x1 , x2 , . . .} ⊂ K tal que A = K.
Exercı́cio 3.5. Seja A = f ∈ C [0, 1]; R ; kf k∞ < 1 e f0 ≡ 0.
Mostre que f0 é ponto interior de A relativamente à norma k k∞
mas não é ponto interior de A relativamente à norma k k1 .
Exercı́cio 3.6. Demonstre a Proposição 3.22.
Exercı́cio 3.7. Prove diretamente a equivalência dos itens (b) e (c)
no Teorema 3.29.
Exercı́cio 3.8. Seja A ⊂ Rn . A fronteira de A é definida por:
∂A = x ∈ Rn ; ∀r > 0, Br (x) ∩ A 6= ∅, Br (x) ∩ (Rn \ A) 6= ∅ .
◦
a) Mostre que ∂A = A \ A = A ∩ (Rn \ A). Em particular, ∂A é
fechado.
◦
b) Mostre que A = A ∪ ∂A e A= A \ ∂A.
c) Determina a fronteira de A = [0, 1] × [0, 1] ∩ Q2 .
Exercı́cio 3.9. Considere as afirmações:
a) X ⊂ Rn é conexo;
b) Se A ⊂ X tal que ∂A ∩ X = ∅, então A = ∅ ou A = X.
Mostre que (a) implica (b), mas a recı́proca é falsa.
4
Limite e Continuidade
Neste capı́tulo iniciamos o estudo sobre limite e continuidade para
funções de Rn em Rm . No que segue estaremos denotando por k k
indistintamente as normas euclidianas, isto é, as normas k k2 de Rn
e Rm .
Definição 4.1: Sejam f : A ⊂ Rn → Rm , x0 ∈ A′ e b ∈ Rm . Dizemos que b é o limite de f (x) quando x se aproxima de x0 em A
(relativamente às normas euclidianas) se
∀ε > 0, ∃δ > 0 tal que x ∈ A e 0 < kx − x0 k < δ ⇒ kf (x) − bk < ε.
Neste caso denotamos
b = lim f (x).
x→x0
Observação: A definição acima pode ser expressa usando-se a notação de bolas, isto é:
lim f (x) = b ⇐⇒
x→x0
∀ε > 0, ∃δ > 0 tal que x ∈ A ∩ Bδ (x0 ) \ {x0 } ⇒ f (x) ∈ Bε (b).
Ou ainda na forma mais concisa
∀ε > 0, ∃δ > 0 tal que f A ∩ Bδ (x0 ) \ {x0 } ⊂ Bε (b).
36
Cálculo Avançado I
Teorema 4.2: Sejam f : A ⊂ Rn → Rm , f = (f1 , . . . , fm ), onde
fi : A ⊂ Rn → R, ∀i = 1, . . . , m, x0 ∈ A′ e b ∈ Rm , b = (b1 , . . . , bm ).
Então
lim f (x) = b
x→x0
⇐⇒
lim fi (x) = bi ,
x→x0
∀i = 1, . . . , m.
Prova: Suponhamos limx→x0 fi (x) = bi e seja ε > 0. Então existem
δ1 , . . . , δm > 0 tais que x ∈ A e 0 < kx − x0 k < δi ⇒ |fi (x) − bi | <
ε/m. Se {e1 , . . . , em } é a base canônica de Rm , então considerando-se
δ = min{δ1 , . . . , δm } temos, para x ∈ A e 0 < kx − x0 k < δ:
kf (x) − bk ≤ |f1 (x) − b1 | + · · · + |fm (x) − bm | < ε.
Reciprocamente, se limx→x0 f (x) = b, para ε > 0 dado, existe δ > 0
tal que se x ∈ A e 0 < kx − x0 k < δ então kf (x) − bk < ε. Como
|fi (x) − bi | ≤ kf (x) − bk para todo i = 1, . . . , m segue o resultado.
As provas dos próximos resultados desta seção são deixadas como
exercı́cio para o leitor
Teorema 4.3: Seja f : A ⊂ Rn → Rm e x0 ∈ A′ . Então,
lim f (x) = b ⇐⇒
x→x0
∀ {xk }k ⊂ A tal que xk 6= x0 , ∀k
e xk → x0 ⇒ f (xk ) → b.
Teorema 4.4: Sejam f, g: A ⊂ Rn → R e x0 ∈ A′ . Se
lim f (x) = b e lim g(x) = c,
x→x0
então
x→x0
lim (f ± g)(x) = b ± c
x→x
0
lim (f g)(x) = bc
x→x0
Além disso, se c 6= 0 então
f
b
lim
(x) = .
x→x0
g
c
Limite e Continuidade
37
Corolário 4.5: Sejam f, g: A ⊂ Rn → Rm e x0 ∈ A′ . Se
lim f (x) = b
x→x0
e
lim g(x) = c,
x→x0
então
lim f (x) : g(x) = hb : ci.
x→x0
Lema 4.6: Seja, k k∗ e k k∗∗ respectivamente normas de Rn e Rm
equivalentes às normas euclidianas. Então limx→x0 f (x) = b relativamente às normas k k∗ e k k∗∗ se e somente se limx→x0 f (x) = b
relativamente às normas euclidianas
Observação: É preciso ter cuidado com o limite de funções compostas. De fato, parece intuitivamente razoável esperar que se
f : A ⊂ Rn → Rm , x0 ∈ A′ e g: B ⊂ Rm → Rk , y0 ∈ B ′
são tais que f (A) ⊂ B e
lim f (x) = y0 e lim g(y) = z0 ,
x→x0
y→y0
então
lim (g ◦ f )(x) = z0 .
x→ x0
No entanto, isto é em geral falso, como se pode ver pelos exemplos a
seguir. Sejam f, g: R → R, definidas por:
f (x) =
n
1 se x 6= 0
0 se x = 0
e
g(x) =
n
1
0
se x 6= 1
se x = 1
Então
lim f (x) = 1
x→0
e lim g(y) = 1.
y→1
Entretanto, é fácil ver que
(g ◦ f )(x) =
n
0 se x 6= 0
1 se x = 0
e
lim (g ◦ f )(x) = 0.
x→0
38
Cálculo Avançado I
Funções contı́nuas
Definição 4.7: Seja f : A ⊂ Rn → Rm e x0 ∈ A ∩ A′ . Dizemos que
f é contı́nua em x0 se limx→x0 f (x) = f (x0 ). Mais precisamente,
∀ε > 0, ∃δ > 0 tal que x ∈ A e kx − x0 k < δ ⇒ kf (x) − f (x0 )k < ε.
Usando a notação de bolas, podemos dizer que f é contı́nua em x0
se e somente se
∀ε > 0, ∃δ > 0 tal que x ∈ A ∩ Bδ (x0 ) ⇒ f (x) ∈ Bε f (x0 ) ,
ou ainda
∀ε > 0, ∃δ > 0 tal que f A ∩ Bδ (x0 ) ⊂ Bε f (x0 ) .
Observação: Decorre das propriedades sobre limites os seguintes
fatos:
a) Se f = (f1 , f2 , . . . , fm ), então f é função contı́nua em x0 se e
somente se fi : A ⊂ Rn → R é contı́nua em x0 .
b) Se f, g: A ⊂ Rn → R são contı́nuas em x0 e λ ∈ R, então as
funções f + g, f g e λf são contı́nuas em x0 . Além disso, se
g(x0 ) 6= 0, então a função f /g é contı́nua em x0 .
Teorema 4.8: Sejam f : A ⊂ Rn → Rm , g: B ⊂ Rm → Rk tais que
f (A) ⊂ B. Se x0 ∈ A′ , y0 ∈ B ∩ B ′ ,
lim f (x) = y0
x→x0
e g é contı́nua em y0 ,
então
lim (g ◦ f )(x) = g(y0 ).
x→x0
Prova: Seja ε > 0 dado. Como g é contı́nua em y0 , existe µ > 0 tal
que y ∈ B ∩ Bµ (y0 ) ⇒ g(y) ∈ Bε (g(y0 )). Como limx→x0 f (x) = y0 ,
existe δ > 0 tal que x ∈ Bδ (x0 ) \ {x0 } ∩ A ⇒ f (x) ∈ Bµ (y0 ).
Portanto,
x ∈ Bδ (x0 ) \ {x0 } ∩ A ⇒ y = f (x) ∈ Bµ (y0 )
Limite e Continuidade
39
e consequentemente
g(f (x)) ∈ Bε (g(y0 ))
Definição 4.9: Quando uma função f é contı́nua em todos os pontos
de seu domı́nio, dizemos simplesmente que f é função contı́nua.
Teorema 4.10: Seja f : Rn → Rm . Então as afirmativas abaixo são
equivalentes.
a) f é função contı́nua;
b) se A é aberto em Rm ⇒ f −1 (A) é aberto em Rn ;
c) se F é fechado em Rm ⇒ f −1 (F ) é fechado em Rn ;
Prova: Provemos “(a) ⇔ (b)”:
Seja x0 ∈ f −1 (A). Então y0 = f (x0 ) ∈ A. Como A é aberto, existe
ε > 0 tal que B
x0 , existe δ > 0 tal
ε (y0 ) ⊂ A. Como f é contı́nua em
−1
que f Bδ (x0 ) ⊂ Bε (y0 ) ⊂ A. Logo Bδ (x0 ) ⊂ f (A).
Reciprocamente, dado ε > 0 seja A = Bε (y0 ) com y0 = f (x0 ).
Como A é aberto, temos por hipótese f −1 (A) aberto.
Logo existe
δ>
0 tal que Bδ (x0 ) ⊂ f −1 (A). Portanto, f Bδ (x0 ) ⊂ f f −1 (A) ⊂ A.
Provemos “(b) ⇔ (c)”:
Se F é fechado então A = F c é aberto. Pelo item (b) f −1 (A) =
f −1 (F )c é aberto. Logo f −1 (F ) é fechado. Reciprocamente, se A é
aberto, então F = Ac é fechado. Pelo item (c) f −1 (F ) = f −1 (A)c é
fechado. Logo f −1 (A) é aberto.
No caso de funções com valores reais, a oscilação fornece uma caracterização útil sobre a continuidade.
Definição 4.11: Seja f : A ⊂ Rn → R e x0 ∈ A ∩ A′ . A oscilação de
f no ponto x0 é o número real definido por:
ω(f, x0 ) = inf sup f Bδ (x0 ) − inf f Bδ (x0 ) .
δ>0
Teorema 4.12: f : A ⊂ Rn → R é contı́nua em x0 ∈ A ∩ A′ se, e
somente se, ω(f, x0 ) = 0.
Prova: Se f é contı́nua em x0 , dado ε > 0, existe δ > 0 tal que
kx − x0 k < δ
⇒
|f (x) − f (x0 )| < ε.
40
Cálculo Avançado I
Então,
de onde se obtém
sup f Bδ (x0 ) ≤ f (x0 ) + ε,
inf f Bδ (x0 ) ≥ f (x0 ) − ε,
sup f Bδ (x0 ) − inf f Bδ (x0 ) ≤ 2ε.
Logo, ω(f, x0 ) ≤ 2ε e sendo ε > 0 arbitrário, temos ω(f, x0 ) = 0.
Reciprocamente, se ω(f, x0 ) = 0, dado ε > 0, existe δ > 0 tal que
Como
sup f Bδ (x0 ) − inf f Bδ (x0 ) < ε.
inf f Bδ (x0 ) ≤ f (x) ≤ sup f Bδ (x0 ) ,
∀x ∈ Bδ (x0 ),
segue que |f (x) − f (x0 )| < ε para todo x ∈ Bδ (x0 ), com o que
concluı́mos a prova.
Proposição 4.13: Se A, B ⊂ Rn são fechados não vazios e disjuntos,
existe f : Rn → [0, 1] satisfazendo as seguntes propriedades:
f (x) = 1, ∀x ∈ A
e
f (x) = 0, ∀x ∈ B.
Prova: Considere as funções dist(x, A) e dist(x, B) (veja Exercı́cios)
e defina
dist(x, A)
f (x) =
.
dist(x, A) + dist(x, B)
Funções contı́nuas e conjuntos compactos
Os resultados a seguir são fundamentais, especialmente quando se
tem em vista as aplicações.
Teorema 4.14: Seja f : Rn → Rm função contı́nua e K ⊂ Rn conjunto compacto. Então f (K) é conjunto compacto de Rm .
Limite e Continuidade
41
Prova: Seja Aλ λ∈Λ uma cobertura qualquer de f (K). Queremos
S
verificar se ela admite uma subcobertura finita. Como f (K) ⊂ Aλ ,
temos
!
[
[
−1
−1
K⊂f
f (K) ⊂ f
Aλ =
f −1 (Aλ ).
λ
λ
Como f é contı́nua, segue que f −1 (Aλ ) λ∈Λ é cobertura aberta de
K. Como K é compacto, existem λ1 , . . . , λk tais que K ⊂ f −1 (Aλ1 ) ∪
· · · ∪ f −1 (Aλk ). Portanto,
f (K) ⊂ f
k
[
f
−1
(Aλi )
i=1
!
=
k
[
f f
i=1
−1
(Aλi ) ⊂
k
[
Aλi .
i=1
Corolário 4.15: Se f : Rn → R é função contı́nua e K ⊂ Rn é
compacto, então existe x, x ∈ K tais que
f (x) = min{f (x) ; x ∈ K} e
f (x) = max{f (x) ; x ∈ K}.
Prova: Pelo teorema anterior f (K) é compacto de R. Logo é fechado
e limitado. Sendo limitado temos s = sup f (K) < +∞ e s =
inf f (K) > −∞. Sendo fechado temos s ∈ f (K) e s ∈ f (K). Portanto, existem x, x ∈ K tais que s = f (x) e s = f (x).
Como consequência dos resultados anteriores, temos o Teorema da
equivalência das normas em Rn .
Teorema 4.16: Todas as normas em Rn são equivalentes
Prova: Seja k k uma norma qualquer em Rn e k k1 a norma 1
definida por kxk1 = |x1 | + · · · + |xn |. Dado x ∈ Rn , temos
x=
n
X
i=1
xi ei
⇒
kxk ≤
n
X
i=1
|xi |kei k ≤ M kxk1 ,
onde e1 , . . . , en é a base canônica de Rn e M = max{kei k ; i =
1, . . . , n}.
Seja K = x ∈ Rn ; kxk1 = 1 e f (x) = kxk.
42
Cálculo Avançado I
Então f : Rn → R é função contı́nua (relativamente à norma k k1 de
Rn ). Como K é fechado e limitado, e portanto compacto, segue do
corolário anterior que existe x ∈ K tal que m: = f (x) = min f (K).
Observe que m > 0, pois se 0 = m = kxk ⇒ x = 0.
Seja x um ponto qualquer de Rn . Então y = x/kxk1 ∈ K e
m ≤ f (y) =
x
kxk1
=
kxk
kxk1
⇒
mkxk1 ≤ kxk.
Observação: Decorre do Teorema 4.16 e do Lema 4.6 que se uma
função f : Rn → Rm é contı́nua em relação a determinadas normas de
Rn e Rm , então será contı́nua em relação a quaisquer outras normas
de Rn e Rm . Como veremos no final deste capı́tulo, este resultado se
estende para espaços vetoriais de dimensão finita, mas não vale em
geral para espaços de dimensão infinita.
Funções contı́nuas e conjuntos conexos
Sabemos da Análise Real que se f : [a, b] → R é função contı́nua
satisfazendo f (a) < 0 < f (b) (ou f (a) > 0 > f (b)), então existe
x0 ∈ ]a, b[ tal que f (x0 ) = 0, isto é, f possui uma raı́z entre a e
b. Este resultado, conhecido como Teorema do Valor Intermediário,
se generaliza para o caso vetorial usando-se o conceito de conjunto
conexo.
Definição 4.17: Um conjunto B ⊂ Rn é dito conexo se para todo
A1 e A2 abertos tais que B ⊂ A1 ∪ A2 e B ∩ Ai 6= ∅, i = 1, 2, tem-se
A1 ∩ A2 6= ∅.
Teorema 4.18: Se f : Rn → Rm é função contı́nua e B ⊂ Rn conjunto conexo, então f (B) ⊂ Rm é conjunto conexo.
Prova: Sejam A1 e A2 abertos de Rm tais que f (B) ⊂ A1 ∪ A2 e
f (B) ∩ Ai 6= ∅, i = 1, 2. Então
B ⊂ f −1 (f (B)) ⊂ f −1 (A1 ∪ A2 ) = f −1 (A1 ) ∪ f −1 (A2 ).
Como f é contı́nua e Ai é aberto, segue que f −1 (Ai ) é aberto. Além
disso, se y ∈ f (B) ∩ Ai , então existe x ∈ B tal que y = f (x). Por
Limite e Continuidade
43
definição, x ∈ f −1 (Ai ) e portanto B∩f −1 (Ai ) 6= ∅. Como B é conexo,
f −1 (A1 ) ∩ f −1 (A2 ) 6= ∅. Portanto f −1 (A1 ∩ A2 ) 6= ∅ ⇒ A1 ∩ A2 6= ∅.
Logo f (B) é conexo.
Conjuntos convexos e funções convexas
Definição 4.19: Um subconjunto A de um espaço vetorial V é dito
convexo se, para todo x, y ∈ A temos
λx + (1 − λ)y ∈ A,
∀λ ∈ ]0, 1[.
Definição 4.20: Uma função f : A ⊂ V → R é dita convexa se A é
convexo e para todo x, y ∈ A, vale a desigualdade
f λx + (1 − λ)y ≤ λf (x) + (1 − λ)f (y), ∀λ ∈ ]0, 1[.
Lema 4.21: Seja f : A ⊂ V → R uma função convexa. Se x1 ,
x2 , . . . , xk ∈ A e λ1 , λ2 , . . . , λk ∈]0, 1[ são tais que λ1 + · · · + λk = 1,
então
f
k
X
i=1
λi xi
!
≤
k
X
λi f (xi ).
i=1
Prova: Veja Exercı́cios.
Teorema 4.22: Toda função convexa f : Rn → R é contı́nua.
Prova: Faremos a prova em quatro etapas.
Etapa 1: Se f (0) = 0, então 0 ≤ sup f (x) ; kxk1 ≤ 1 < +∞.
É claro que 0 = f(0) ≤ sup f (x) ; kxk1 ≤ 1 . Vamos mostrar
inicialmente que sup f (x) ; kxk1 = 1 < +∞. Seja
b = max f (e1 ), . . . , f (en ), f (−e1 ), . . . , f (−en ) ,
onde {e1 , e2 , . . . , en } é a base canônica de
unitário, isto é, kxk1 = 1, definimos, para
xi /|xi | se xi
ai =
1
se xi
Rn . Se x ∈ Rn é um vetor
i = 1, . . . , n,
6= 0,
=0.
44
Cálculo Avançado I
Então, os vetores ui definidos por ui = ai ei são vetores unitários.
Como
x=
n
X
i=1
|xi |ui ,
|x1 | + · · · + |xn | = 1,
concluı́mos do Lema 4.21 que
f (x) ≤
n
X
i=1
|xi |f (ui ) ≤ max f (u1 ), . . . , f (un ) ≤ b.
(4.1)
Suponhamos que sup f (x) ; kxk1 ≤ 1 = +∞. Então, para cada
k ∈ N, existe xk na bola unitária B = x ∈ Rn ; kxk1 ≤ 1 tal que
f (xk ) ≥ k. Em particular, como xk 6= 0, podemos considerar o vetor
unitário xk = xk /kxk k1 . Como xk = kxk k1 xk + (1 − kxk k1 )0, segue
da convexidade de f que
k ≤ f (xk ) ≤ kxk k1 f (xk ) + (1 − kxk k1 )f (0) ≤ f (xk ),
∀k ∈ N.
Logo sup{f (x) ; kxk1 = 1} = +∞, e temos uma contradição com
(4.1).
Etapa 2: Suponhamos f (0) = 0. Então f é contı́nua em x = 0.
De fato, se f ≡ 0 em B, não há nada a provar. Suponhamos
então
f 6≡ 0 em B. Segue da etapa 1 que 0 < a: = sup f (x) ; x ∈ B <
+∞. Dado 0 < ε < a, seja δ < ε/a.
Se kxk1 < δ, então kx/δk1 < 1 e f (x/δ) ≤ a. Como podemos
escrever x = δ(x/δ) + (1 − δ)0, temos da convexidade
f (x) ≤ δf (x/δ) + (1 − δ)f (0) ≤ δa < ε.
(4.2)
Seja λ = δ/(1 + δ). Então 0 < λ < 1 e temos a combinação convexa
−x
+ (1 − λ)x = 0.
λ
δ
Pela convexidade,
0 = f (0) ≤ λf
−x
δ
+ (1 − λ)f (x) ≤ λa + (1 − λ)f (x)
Limite e Continuidade
45
e concluı́mos que
f (x) ≥ −δa > −ε.
(4.3)
De (4.2) e (4.3) concluı́mos
|f (x)| < ε se
kxk1 < δ.
Etapa 3: Se f (0) 6= 0.
Neste caso, g(x) = f (x) − f (0) é função convexa que se anula em
x = 0. Pelas etapas anteriores, g é contı́nua em x = 0, o mesmo
valendo para f .
Etapa 4: O caso geral.
Seja x0 ∈ Rn . Então g(x) = f (x + x0 ) é função convexa. Portanto,
etapas anteriores, g é contı́nua em x = 0. Segue que f é contı́nua em
x = x0 .
Continuidade uniforme
Vimos anteriormente que uma função é contı́nua quando é contı́nua
em todos os pontos de seu domı́nio. Podemos dizer, portanto, que
a continuidade é um conceito local. Isso se expressa na definição,
pelo fato de que, para cada ε e para cada x, δ = δ(ε, x) depende de
épsilon e do ponto x. A definição que introduzimos a seguir expressa
um conceito global de continuidade—a continuidade uniforme.
Definição 4.23: Seja A ⊂ Rn e f : A → Rm uma função. Dizemos
que f é uniformemente contı́nua em A se ∀ε > 0 existe δ > 0 tal que
se x, y ∈ A kx − yk < δ, então kf (x) − f (y)k < ε.
Exemplo: A função f : R → R definida por f (x) = 1/(1 + x2 ) é
uniformemente contı́nua em R.
É claro que toda função uniformentente contı́nua é contı́nua em seu
domı́nio. Mas a recı́proca é falsa. Considere por exemplo f (x) = x2 .
Definição 4.24: Uma função f : A ⊂ Rn → Rm é dita Lipschitzcontı́nua em A se existe M > 0 tal que
kf (x) − f (y)k ≤ M kx − yk,
∀x, y ∈ A.
46
Cálculo Avançado I
Observação: É fácil ver que toda função Lipschitz-contı́nua é uniformemente contı́nua. É fácil ver também, como consequência imediata do Teorema do Valor Médio, que toda função derivável f : R → R
cuja derivada é limitada em R, é Lipschitz-contı́nua.
Proposição 4.25: Seja f : Rn → Rm uma função linear. Então f é
Lipschitz-contı́nua.
Prova: Seja M = max{kf (e1 )k, . . . , kf (en )k}, onde {e1 , . . . , en } é a
base canônica de Rn . Então, se x = (x1 , . . . , xn ) e y = (y1 , . . . , yn ),
temos
n
X
kf (x) − f (y)k ≤
|xi − yi |kf (ei )k ≤ M kx − yk1
i=1
e a conclusão segue da equivalência das normas de Rn .
As funções Lipschitz-contı́nuas são casos particulares das Höldercontı́nuas, cuja definição é a seguinte.
Definição 4.26: Seja 0 < α ≤ 1. Uma função f : A ⊂ Rn → Rm é
dita Hölder-contı́nua de ordem α em A se existe M > 0 tal que
kf (x) − f (y)k ≤ M kx − ykα ,
∀x, y ∈ A.
Exemplo: A função f : [0, ∞[→ R definida por f (x) = xα , com
0 < α < 1 é Hölder-contı́nua em [0, ∞[.
É claro que toda função Hölder-contı́nua é uniformemente contı́nua.
Observação: Os conceitos de continuidade uniforme, Lipschitz-continuidade e Hölder-continuidade são invariantes para normas equivalentes; são portanto independentes das normas que estejam fixadas
em Rn e Rm .
Teorema 4.27: Toda função contı́nua definida num compacto K ⊂
Rn é uniformemente contı́nua.
Prova: Seja x ∈ K e ε > 0. Como f é contı́nua, existe
Sδx > 0 tal que
se y ∈ Bδx (x) então kf (y)−f (x)k < ε/2. Como K ⊂ x∈K Bδx /2 (x),
segue da compacidade que existem x1 , x2 , . . . , xk em K tais que
K⊂
k
[
i=1
Bδxi /2 (xi ).
(4.4)
Limite e Continuidade
47
Seja δ = min{δx1 /2, δx2 /2, . . . , δxk /2} Então, se x, y ∈ K são tais
que kx − yk < δ, segue de (4.4) que x ∈ Bδxi /2 (xi ), para algum i.
Portanto,
ky − xi k ≤ ky − xk + kx − xi k < δ + δxi /2 ≤ δxi ⇒ y ∈ Bδxi (xi ).
Logo, ky − xk < δ ⇒ kf (x) − f (y)k < ε e temos o resultado.
Espaços vetoriais de dimensão finita
As definições e os resultados anteriores se estendem aos espaços
vetoriais de dimensão finita via os isomorfismos naturais. De fato, se
V é um espaço vetorial de dimensão n, seja {u1 , . . . , un } uma base
de V . Podemos considerar o isomorfismo T : Rn → V definido por
T (ei ) = ui , i = 1, . . . , n, onde {e1 , . . . , en } é a base canônica de Rn ,
que induz a V as propriedades de Rn .
A tı́tulo de exemplo, consideremos a extensão do Teorema 4.16 aos
espaços vetoriais reais de dimensão finita.
Teorema 4.28: Seja V um espaço vetorial de dimensão finita. Então
todas as normas de V são equivalentes.
Prova: Suponhamos n a dimensão de V e seja {u1 , . . . , un } uma
base de V . Consideremos o isomorfismo T : Rn → V definido por
T (ei ) = ui , i = 1, . . . , n, onde {e1 , . . . , en } é a base canônica de Rn .
Se k k∗ e k k∗∗ são duas normas de V , sejam respectivamente
k kα e k kβ as normas de Rn induzidas por T pela relação (2.7).
O Teorema 4.16 garante que estas normas são equivalentes em Rn .
A equivalência das normas de V é consequência do Teorema 2.11.
De um modo geral, sejam V e W espaços vetoriais de dimensão
finita e f : V → W , T : V → Rn e S: V → Rm isomorfismos. As
definições anteriores se estendem naturalmente a V e W e os resultados podem ser induzidos pelo diagrama
48
Cálculo Avançado I
f
V
−−−−−−→ W
x
x
T y T −1
S −1 y S
Rn
g
−−−−−−→
Rm
O espaço vetorial das transformações lineares
Sejam V e W dois espaços vetoriais de dimensão finita e consideremos o conjunto de todas as transformações lineares de V em W :
L(V, W ) = T : V → W ; T é linear .
L(V, W ) é espaço vetorial se munido das operações usuais de soma de
funções e produto por escalar. Além disso, se dim V = n e dim W =
m, então dim L(V, W ) = mn. De fato, fixadas bases em V e W ,
L(V, W ) pode ser identificado a Mm×n via isomorfismo natural. Em
particular, decorre do Teorema 2.11 que L(V, W ) é espaço vetorial
normado com todas as normas equivalentes.
Nota: Se V ou W são espaços vetoriais normados de dimensão infinita, a situação é muito mais complicada pois, contrariamente ao
caso finito, existem transformações lineares de V em W que não
são contı́nuas. A maneira natural de se introduzir uma norma em
L(V, W ) é a seguinte (veja Exercı́cio 4.13): se T ∈ L(V, W ), definimos
(4.5)
kT kL(V,W ) = sup kT xkW ; kxkV = 1 .
O teorema de ponto fixo de Banach
Seja V um espaço vetorial normado, A ⊂ V e f : A → V uma
função.
Definição 4.29: Dizemos que f é uma contração em A se existe
0 ≤ α < 1 tal que
kf (x) − f (y)kV ≤ αkx − ykV ,
∀x, y ∈ A.
Limite e Continuidade
49
Definição 4.30: Dizemos que x ∈ V é um ponto fixo para uma
função f : V → V se f (x) = x.
Teorema 4.31: Seja V um espaço de Banach relativamente à norma
k kV . Se f : V → V é uma contração em V , então f possui um único
ponto fixo.
Prova: Seja x0 ∈ V e considere a sequência definida implicitamente
por xk+1 = f (xk ), ∀k ≥ 0. Então,
kxk+1 − xk kV = kf (xk ) − f (xk−1 )kV ≤ αkxk − xk−1 kV
≤ α2 kxk−1 − xk−2 kV ≤ · · ·
≤ αk kx1 − x0 kV .
Portanto, se k, l ∈ N, temos (supondo k ≥ l)
kxk − xl kV ≤ kxk − xk−1 kV + · · · + kxl+1 − xl kV
≤ αk−1 + αk−2 + · · · + αl kx1 − x0 kV
≤
αl
kx1 − x0 kV .
1−α
Como α < 1, dado ε > 0, podemos escolher l0 ∈ N tal que
αl0
kx1 − x0 kV < ε,
1−α
de modo que se k, l ≥ l0 então kxk − xl kV < ε. Logo {xk } é sequência
de Cauchy em V e, portanto, converge para algum x ∈ V .
Para concluir que x é ponto fixo de f , basta observar que sendo f
contı́nua, segue do Teorema 4.3 que
x = lim xk+1 = lim f xk = f lim xk = f (x).
k→∞
k→∞
k→∞
Sendo a unicidade consequência imediata da definição de contração,
concluı́mos a prova.
Observação: É oportuno observar que, se uma função f é uma contração em V relativamente a uma norma k k∗ , pode não ser contração
em relação a uma outra norma equivalente (veja exercı́cios).
50
Cálculo Avançado I
Semicontinuidade
O Corolário 4.15 estabelece a existência de máximos e mı́nimos
para funções reais contı́nuas definidas em conjuntos compactos de Rn .
Este resultado, fundamental para as aplicações, pode ser generalizado
para funções descontı́nuas que satisfaçam certas propriedades que
definiremos a seguir.
Definição 4.32: Sejam f : A ⊂ Rn → R e x0 ∈ A′ . Definimos o
limite inferior e o limite superior de f (x) em x0 (ou quando x se
aproxima de x0 ) respectivamente por:
lim inf f (x) = lim inf f (x) ; x ∈ A ∩ (Br (x0 ) \ {x0 })
x→x0
r↓0
= lim inf f A ∩ Br (x0 ) \ {x0 }
r↓0
lim sup f (x) = lim sup f (x) ; x ∈ A ∩ (Br (x0 ) \ {x0 })
r↓0
x→x0
= lim sup f A ∩ Br (x0 ) \ {x0 }
r↓0
Observação: É fácil ver que
−∞ ≤ lim inf f (x) ≤ lim sup f (x) ≤ +∞
x→x0
x→x0
e que, se f é função limitada, então o limite inferior e o limite superior
sempre existem.
Exemplo: lim inf x→0 sen(1/x) = −1 e lim supx→0 sen(1/x) = 1.
Lema 4.33: f possui limite em x0 se e somente se o limite inferior
e o limite superior de f são iguais. Mais precisamente,
l = lim f (x) ⇐⇒ lim inf f (x) = lim sup f (x) = l.
x→x0
x→x0
x→x0
Prova: Suponhamos lim inf x→x0 f (x) = lim supx→x0 f (x) = l e sejam
l(r) = inf f A ∩ Br (x0 ) \ {x0 }
(4.6)
L(r) = sup f A ∩ Br (x0 ) \ {x0 }
Limite e Continuidade
51
Então, dado ε > 0, existe δ > 0 tal que
⇒
0<r<δ
l − ε < l(r) ≤ L(r) < l + ε.
Além disso, segue de (4.6) que
∀x ∈ A ∩ Br (x0 ) \ {x0 } .
l − ε < l(r) ≤ f (x) ≤ L(r) < l + ε,
Portanto, se x ∈ A e 0 < kx − x0 k < δ, então |f (x) − l| < ε e
concluı́mos que l = limx→x0 f (x).
Reciprocamente, suponhamos que l = limx→x0 f (x). Então, dado
ε > 0 existe δ > 0 tal que
0 < kx − x0 k < δ
⇒
|f (x) − l| < ε/2.
Definindo-se l(r) como em (4.6), temos
0<r<δ
⇒
l − ε/2 ≤ l(r) < l + ε/2
e concluı́mos que
l = lim l(r) = lim inf f (x).
r↓0
x→x0
O mesmo argumento mostra que l é o limite superior de f em x0 .
Definição 4.34: Seja f uma função real definida em A ⊂ Rn e
x0 ∈ A ∩ A′ . Dizemos que f é semicontı́nua inferiormente (sci) em
x0 se
f (x0 ) ≤ lim inf f (x).
x→x0
Analogamente, dizemos que f é semicontı́nua superiormente (scs) em
x0 se
f (x0 ) ≥ lim sup f (x).
x→x0
Em particular, como consequência imediata do lema 4.33, temos:
Corolário 4.35: Um função real f definida em A ⊂ Rn é contı́nua
em x0 ∈ A ∩ A′ se e somente se é semicontı́nua inferiormente e superiormente em x0 .
52
Cálculo Avançado I
Proposição 4.36: Seja f uma função real definida em A ⊂ Rn
e x0 ∈ A ∩ A′ . Então f é semicontı́nua inferiormente em x0 se e
somente se para todo ε > 0, existe δ > 0 tal que
x ∈ A e kx − x0 k < δ
⇒
f (x) > f (x0 ) − ε.
Prova: Se f é sci em x0 , então
f (x0 ) ≤ l = lim inf f (x) = lim l(r),
x→x0
r↓0
(4.7)
onde l(r) é definido por (4.6).
Dado ε > 0, existe δ > 0 tal que se 0 < r < δ, então l − ε < l(r) <
l + ε. Em particular, se x ∈ A e kx − x0 k < r, então l(r) ≤ f (x).
Portanto, se x ∈ A e kx − x0 k < δ, podemos escolher r > 0 tal que
kx − x0 k < r < δ e
f (x0 ) − ε ≤ l − ε ≤ l(r) ≤ f (x).
Reciprocamente,
se f (x) ≥ f (x0 ) − ε ∀x ∈ A ∩ Bδ (x0 ), então l(r) =
inf f (x) ; x ∈ A ∩ Br (x0 ) ≥ f (x0 ) − ε, ∀r < δ.
Como l(r) é função decrescente, segue que
f (x0 ) − ε ≤ l(r) ≤ lim l(r) = lim inf f (x).
r↓0
x→x0
(4.8)
A conclusão segue fazendo-se ε ↓ 0 em (4.8).
Definição 4.37: Uma função real f : A ⊂ Rn → R é dita semicontı́nua inferior (sci) se for semicontı́nua inferiormente em cada
ponto de A. Analogamente, dizemos que f é semicontı́nua superior
(scs) se for semicontı́nua superiormente em cada ponto de A.
n
→ R é função sci se e somente se para todo
Teorema 4.38: f : R
−1
α ∈ R, f
]α, +∞[ é aberto em Rn .
Prova: Suponha f sci. Se x0 ∈ f −1 ]α, +∞[ , então f (x0 ) > α.
Considere ε > 0 tal que f (x0 ) − ε > α. Como f é sci, segue da
Proposição 4.36 que existe δ > 0 tal que kx − x0 k < δ implica f (x) >
f (x0 ) − ε. Logo
kx − x0 k < δ ⇒ f (x) > f (x0 ) − ε > α ⇒ f (x) ∈ ]α, +∞[.
Limite e Continuidade
53
o que implica que Bδ (x0 ) ⊂ f −1 ]α, +∞[ .
Reciprocamente, se x0 ∈ Rn e ε > 0, considere α = f (x0 ) − ε e
I = ]α, +∞[. Por hipótese f −1 (I) é conjunto aberto de Rn . Logo,
existe δ > 0 tal que Bδ (x0 ) ⊂ f −1 (I). Portanto,
kx − x0 k < δ ⇒ f (x) ∈ I ⇒ f (x) > f (x0 ) − ε.
n
Corolário 4.39: f : R
→ R é função scs se e somente se para todo
−1
] − ∞, α[ é aberto em Rn .
α ∈ R, f
O resultado a seguir generaliza o Corolário 4.15.
Teorema 4.40: Seja f : Rn → R função sci e K ⊂ Rn conjunto
compacto. Então existe x0 ∈ K tal que f (x0 ) = min f (K).
Prova: Faremos a prova em duas etapas:
Etapa 1: Provemos que inf f (K) > −∞.
De fato, como f é sci, para todo x ∈ K existe δx > 0 tal que
ky − xk < δx ⇒ f (y) > f (x) − 1.
É claro que Bδx (x) x∈K é cobertura aberta de K. Portanto existem
x1 , . . . , xk ∈ K tais que
K⊂
k
[
Bδxj (xj ).
j=1
Seja m = min{f (x1 ), . . . , f (xk )}. Se y ∈ K, então ky − xj k < δxj ,
para algum j e f (y) > f (xj ) − 1 ≥ m − 1.
Etapa 2: Provemos que existe x0 ∈ K tal que f (x0 ) ≤ f (x) para todo
x ∈ K. Seja l = inf f (K) (l ∈ R pela etapa 1) e suponha l ∈
/ f (K).
Então l < f (x), ∀x ∈ K.
Para cada x ∈ K, considere
lx ∈ R tal que l < lx < f (x) e defina
−1
Ix = ]lx , +∞[. Então f (Ix ) x∈K é cobertura aberta de K. Como
K é compacto, existem, x1 , x2 , . . . , xk tais que
K⊂
k
[
j=1
f −1 (Ixj )
54
Cálculo Avançado I
Seja l = min{lx1 , . . . , lxk }. Então l > l e se x ∈ K, então f (x) ∈ Ixj
para algum 1 ≤ j ≤ k, o que implica f (x) > lxj ≥ l > l. Portanto
f (x) ≥ l > l ∀x ∈ K ⇒ inf f (K) ≥ l > l
e temos uma contradição.
Corolário 4.41: Seja f : Rn → R função scs e K ⊂ Rn conjunto
compacto. Então existe x0 ∈ K tal que f (x0 ) = max f (K).
Exercı́cios
Exercı́cio 4.1. Sejam a, b, c, d números reais positivos. Mostre que
o limite
|x|a |y|b
lim
x→0 |x|c + |y|d
y→0
existe (e vale zero) se, e somente se,
b
a
+ > 1.
c
d
Exercı́cio 4.2. Sejam f1 e f2 duas funções de Rn em R e considere
g: Rn → R definida por g(x) = max{f1 (x), f2 (x)}.
Prove se verdadeira ou dê contra-exemplo se falsa:
a) Se f1 e f2 são contı́nuas, então g é contı́nua.
b) Se g é contı́nua, então f1 e f2 são contı́nuas.
c) Sejam f1 , f2 , . . . , fk funções contı́nuas de Rn em R. Defina f por
f (x) = max f1 (x), . . . , fk (x) .
As mesmas afirmativas de (a) e (b).
Exercı́cio 4.3. Demonstre o Lema 4.21. Use o resultado para mostrar que se 1 < p1 , p2 , . . . , pk < +∞ são tais que
1
1
1
+
+···+
= 1,
p1
p2
pk
Limite e Continuidade
55
então vale a seguinte generalização da desigualdade de Young.
|x1 x2 · · · xk | ≤
|x1 |p1
|xk |pk
+···+
.
p1
pk
(4.9)
.
Exercı́cio 4.4. Diz-se que uma função f : Rn → Rm é aberta se f (U )
é aberto de Rm para todo U ⊂ Rn aberto. Seja f : Rn → Rn uma
função invertı́vel tal que f −1 é contı́nua. Mostre que f é aberta.
Exercı́cio 4.5.
a) Sejam A e B subconjuntos de Rn e f : A −→ B uma função
bijetora. Se A é compacto e f é contı́nua, mostre que f −1 : B −→
A é contı́nua.
b) Dê exemplo com A, B ⊂ R e f : A −→ B bijetora e contı́nua tal
que f −1 : B −→ A não é contı́nua. Faça o mesmo com A, B ⊂ R2 .
Exercı́cio 4.6. Seja f : Rn → R uma função contı́nua tal que
lim
kxk→+∞
f (x) = +∞.
(4.10)
Mostre que existe x0 ∈ Rn tal que f (x0 ) ≤ f (x), ∀x ∈ Rn .
Obs.: Se f satisfaz (4.10), dizemos que f é coerciva.
Exercı́cio 4.7. Mostre que a função f : [0 , ∞) → R definida por
f (x) = xα , com 0 < α < 1 é Hölder contı́nua de ordem α.
Exercı́cio 4.8. Considere f : [0, 1/e] → R definida por
0 √
se x = 0
f (x) =
1/ − ln x se 0 < x ≤ 1/e
Mostre que f é uniformemente contı́nua mas não é Hölder contı́nua.
Exercı́cio 4.9. Seja F ⊂ Rn um conjunto fechado e não vazio. Para
cada x ∈ Rn defina
dist(x, F ) = inf kx − yk ; y ∈ F .
a) Mostre que, para cada x ∈ Rn , existe yx ∈ F tal que dist(x, F ) =
kx − yx k.
b) Mostre que a função x 7→ dist(x, F ) é Lipschitz contı́nua.
56
Cálculo Avançado I
Exercı́cio 4.10. Dados a, b ∈ R e A, B conjuntos fechados não
vazios disjuntos, mostre que existe uma função f : Rn → R contı́nua
satisfazendo as seguintes propriedades
f (x) = a, ∀x ∈ A,
f (x) = b, ∀x ∈ B.
min{a, b} ≤ f (x) ≤ max{a, b},
∀x ∈ Rn .
Exercı́cio 4.11.
a) Mostre que se A ⊂ Rn é um conjunto aberto e convexo e f : A →
R é uma função convexa, então f é contı́nua. Mostre que o
resultado é falso se A não for aberto.
b) Seja f : [a, b] → R função convexa. Mostre que f é semicontı́nua
superiormente em [a, b].
c) Dê um exemplo de uma função convexa definida na bola B =
{x ∈ R2 ; kxk2 ≤ 1} que não seja semicontı́nua superiormente
em B.
Exercı́cio 4.12. Prove que o conjunto Nr = {x ∈ Rn | f (x) ≤ r} é
convexo se f é função convexa.
Exercı́cio 4.13. Seja Ω ⊂ Rn um conjunto aberto e convexo. Uma
função f : Ω → ]0, ∞[ é dita log-côncava em Ω se a função log f (x)
é côncava em Ω.
a) Prove que toda função log-côncava é contı́nua.
b) Prove que f é log-côncava ⇔ f λx +(1 −λ)y ≥ f (x)λ f (y)(1−λ) ,
∀x, y ∈ Rn , ∀λ ∈ [0, 1].
c) Prove que o conjunto Nr = {x ∈ Rn | f (x) ≥ r} é convexo se f
é log-côncava.
d) Toda função log-côncava é côncava? Toda função côncava é logcôncava?
Exercı́cio 4.14. Seja f : Rn → R uma função estritamente convexa,
isto é, f tx1 +(1−t)x2 < tf (x1 )+(1−t)f (x2), para todo x1 , x2 ∈ Rn
com x1 6= x2 e para todo t ∈ ]0, 1[. Mostre que se f é coerciva
(veja (4.10)), então existe um único x0 ∈ Rn tal que f (x0 ) ≤ f (x),
∀x ∈ Rn .
Exercı́cio 4.15. Seja C ⊂ Rn conjunto convexo e fechado.
Limite e Continuidade
57
a) Mostre que ∀x ∈ Rn , existe um único y ∈ C tal que kx − yk2 ≤
kz − xk2 , ∀z ∈ C.
(y = PC (x) é denominado a projeção ortogonal de x sobre C.
Temos assim definida a aplicação
PC : R n
x
→
Rn
7
→
PC (x)
(4.11)
b) Mostre que y = PC (x) ⇐⇒ hx − y : z − yi ≤ 0, ∀z ∈ C.
c) Use o item (b) para mostrar que PC satisfaz
kPC (x) − PC (y)k22 ≤ x − y : PC (x) − PC (y)
e conclua que PC é Lipschitz-contı́nua em Rn .
d) Verifique que os argumentos dos itens anteriores continuam válidos para qualquer norma que provenha de um produto escalar.
e) Mostre que ∀x ∈ Rn , existe (não necessariamente único) y ∈ C
tal que kx − yk1 ≤ kz − xk1 , ∀z ∈ C. Analogamente, existe (não
necessariamente único) y ∈ C tal que kx − yk∞ ≤ kz − xk∞ ,
∀z ∈ C.
Exercı́cio 4.16. Considere Rn munido da norma k k∗ e Rm munido
da norma k k• . Seja f : (Rn , k k∗ ) → (Rm , k k• ) definida por f (x) =
Ax, onde A é matriz (m × n). Defina
(
MA = sup{kf (x)k• ; kxk∗ = 1},
mA = inf{C ≥ 0; kf (x)k• ≤ Ckxk∗ }.
1. Prove que MA = mA = kf (x0 )k• para algum vetor unitário
x 0 ∈ Rn ;
2. Prove as seguintes propriedades:
a) MA+B ≤ MA + MB ;
b) MλA = |λ|MA ;
c) MA ≥ 0 e MA = 0 ⇐⇒ A = 0.
d) Mostre que se m = n e k · k• = k · k∗ , então MAB ≤ MA MB .
Em particular, se A é invertı́vel, então MA−1 ≥ 1/MA .
58
Cálculo Avançado I
3. Calcule MA nos seguintes casos:
a) A: (Rn , k k∞ ) → (Rm , k k∞ )
b) A: (Rn , k k1 ) → (Rm , k k1 )
c) A: (Rn , k k1 ) → (Rm , k k∞ )
Definição: Denotando
kAk = MA ,
(4.12)
temos definida uma norma no espaço vetorial das matrizes e vale a
desigualdade kAxk• ≤ kAkkxk∗ ∀x ∈ Rn . A norma definida por
(4.12) é denominada norma induzida pelas normas k k∗ e k k•
Exercı́cio 4.17. Se V é um espaço vetorial normado, o espaço das
funções lineares contı́nuas de V em R, é denominado espaço dual de
V e denotado por V ′ .
Seja V = Rn munido da norma k kp , com p ∈ [1, +∞]. Mostre que V ′
pode ser identificado a Rn e, para todo y ∈ Rn , kykV ′ = kykq , onde
q ∈ [1, +∞] satisfaz 1/p + 1/q = 1 (q = 1 se p = +∞ e vice-versa).
Exercı́cio 4.18. Seja A matriz m × n e defina a função f : Rn → Rm
por f (x) = Ax. Mostre que
f é injetora ⇐⇒ ∃k > 0 tal que kf (x)k ≥ kkxk,
∀x ∈ Rn .
Exercı́cio 4.19. Seja M2 o espaço das matrizes quadradas 2 × 2 a
coeficientes reais, com alguma norma. Seja
det: M2 a11 a12
a21 a22
−→
7→
R
a11 a22 − a21 a12
a) Mostre que det é contı́nua.
b) Mostre que S = {A ∈ M2 ; det A 6= 0} é aberto e não conexo.
c) Seja f : S → M2 a função definida por f (X) = X −1 . Mostre que
f é contı́nua em S. Sug.: X −1 − X0−1 = X −1 (X0 − X)X0−1 .
Exercı́cio
4.20. Seja f : Rn → Rm função contı́nua e defina Z(f ) =
n
x ∈ R ; f (x) = 0 . Mostre que Z(f ) é fechado em Rn .
Limite e Continuidade
59
Exercı́cio 4.21. Seja f : Rn → R contı́nua em 0 e tal que
f (x + y) = f (x) + f (y),
∀x, y ∈ Rn .
Mostre que existe a ∈ Rn tal que f (x) = ha : xi, ∀x ∈ Rn .
Exercı́cio 4.22. Seja f : Rn → R contı́nua tal que para todo x, y ∈
Rn ,
f (x) + f (y)
x+y
f
≤
.
2
2
Mostre que f é convexa.
Exercı́cio 4.23. Seja f : Rn −→ Rm uma função e considere seu
gráfico
G(f ) = {(x, y) ∈ Rn+m ; y = f (x), ∀x ∈ Rn }.
a) Mostre que se f é contı́nua, então G(f ) é fechado em Rn+m .
b) Mostre que se G(f ) é fechado e f é limitada, então f é contı́nua.
c) Considere G(f |K ) = {(x, y) ∈ Rn+m ; y = f (x), ∀x ∈ K}.
Mostre que se f é contı́nua e K é compacto em Rn , então G(f |K )
é compacto em Rn+m .
Exercı́cio 4.24.
Seja f : Rn −→ Rn tal que f k = f ◦ f ◦ · · · ◦ f é
|
{z
}
k vezes
uma contração. Mostre que f possui um único ponto fixo.
Exercı́cio 4.25. Verdadeiro ou falso?
1) f e g contrações ⇒ f ◦ g contração.
2) f ◦ f contração ⇒ f contração.
Exercı́cio 4.26. Seja f (x, y) = ( x3 − y4 + 3 , x2 + y2 − 8). Mostre que
f não é contração na norma k k∞ mas é contração na norma k k1 .
Portanto f possui um único ponto fixo. Calcule-o.
Exercı́cio 4.27. Seja g: [a, b] → R função contı́nua e crescente e
f : X → [a, b]. Mostre que
sup g f (x) = g sup f (x) .
x
x
Exercı́cio 4.28. Seja f : R → R uma função monótona crescente e
A ⊂ R conjunto limitado.
60
Cálculo Avançado I
a) Mostre que
sup f (x) ≤ f (sup A)
e
x∈A
f (inf A) ≤ inf f (x).
x∈A
b) Mostre que se f é sci então
sup f (x) = f (sup A).
x∈A
Exercı́cio 4.29. Seja {sk }k sequência de números reais e defina:
lim inf sk = lim inf{sk , sk+1 , sk+2 , . . .}.
k→+∞
k→+∞
Seja f : A ⊂ Rn → R, x0 ∈ A ∩ A′ . Mostre que f é semicontı́nua
inferiormente em x0 se e somente se
f (x0 ) ≤ lim inf f (xk ) ∀ {xk }k ⊂ A tal que xk → x0 .
k→+∞
Exercı́cio 4.30. Usando argumento de sequências, prove que se K ⊂
Rn é compacto e f : Rn → R é função sci, então existe x0 ∈ K tal que
f (x0 ) = min{f (x) ; x ∈ K}.
a) Prove que l = inf f (K) > −∞
b) Prove que se l = inf f (K) então l ∈ f (K).
Exercı́cio 4.31. Seja {fα }α uma famı́lia de funções s.c.i. de Rn em
R. Defina f : Ω → R por:
Ω = {x ∈ Rn ; sup fα (x) < ∞}
α
∀x ∈ Ω,
a)
b)
c)
d)
f (x) = sup fα (x)
α
Mostre que f é semicontı́nua inferiormente em Ω.
Se fα é contı́nua ∀α, podemos concluir que f é contı́nua?
Se fα é função convexa ∀α, mostre que f é convexa.
Mostre que as afirmativas anteriores se verificam trocando-se
acima: “sci”, “sup”, “< ∞” e “convexa” respectivamente por
“scs”, “inf”, “> −∞” e “côncava”.
5
Funções Diferenciáveis
Vamos iniciar o estudo da diferenciabilidade no caso das funções reais
de n variáveis, isto é, funções f : Rn → R.
Derivadas direcionais
Definição 5.1: Seja x0 ∈ Rn e u um vetor unitário de Rn . Dizemos
que f possui derivada direcional em x0 na direção u se existe o limite
f (x0 + λu) − f (x0 )
,
λ→0
λ
lim
denominado derivada direcional de f (em x0 na direção u) e denotada
por:
∂f
(x0 ).
∂u
No caso em que u = ei é o i-ésimo vetor da base canônica, denotamos
a derivada direcional na direção de ei por
∂f
(x0 ),
∂xi
que denominamos derivada parcial de f em x0 em relação a xi .
Definição 5.2: Uma função f : Rn → R é dita Gateaux derivável em
x0 se f possui derivadas direcionais em x0 em todas as direções u.
62
Cálculo Avançado I
Observação: As derivadas direcionais podem parecer, à primeira
vista, a generalização natural para a definição de derivada de uma
função real de uma variável. Entretanto, a existência das derivadas
direcionais não assegura a regularidade de f em torno de x0 , como
no caso de uma variável (caso n = 1). De fato, contrariamente ao
caso unidimensional, uma função que é Gateaux-diferenciável num
ponto x0 não é necessariamente contı́nua neste ponto. Por exemplo,
consideremos
f (x, y) =
(
xy 2
x2 + y 4
0
se (x, y) 6= (0, 0)
(5.1)
senão
Figura 5.1
Se u = (u1 , u2 ) é um vetor unitário qualquer, então
f (λu) − f (0)
∂f
(0, 0) = lim
=
λ→0
∂u
λ
(
u22
u1
0
se u1 6= 0,
senão.
Entretanto, f não é contı́nua em (0, 0). De fato, f (t2 , t) = 1/2,
∀t 6= 0.
Funções diferenciáveis: o caso escalar
No que segue consideraremos Ω ⊂ Rn um conjunto aberto, k k a
norma euclidiana de Rn e f : Ω → R uma função.
Funções Diferenciáveis
63
Definição 5.3: Dizemos que f é diferenciável (ou Fréchet-derivável)
em x0 ∈ Ω se existem funções L, εx0 : Rn → R tais que
f (x0 + h) = f (x0 ) + L(h) + εx0 (h),
(5.2)
com L linear e εx0 satisfazendo
|εx0 (h)|
= 0.
h→0
khk
lim
(5.3)
Se εx0 (h) satisfaz (5.3), dizemos que εx0 é função o(khk). Para simplificar a notação, escreveremos simplesmente ε(h), deixando de explicitar a dependência de ε em x0 .
Se f é função diferenciável em x0 , então a transformação linear L
é denominada diferencial de f em x0 (ou a derivada de Fréchet de f
em x0 ) e denotamos f ′ (x0 ).
Exemplos 1: Consideremos f (x, y) = xy. Se h = (h1 , h2 ), então
f (x0 + h1 , y0 + h2 ) = x0 y0 + y0 h1 + x0 h2 + h1 h2 .
Como L(h) = y0 h1 + x0 h2 é linear e ε(h) = h1 h2 satisfaz
|ε(h)|/khk ≤ khk/2 → 0
se
h → 0,
temos que f é diferenciável em (x0 , y0 ) e f ′ (x0 , y0 )(h) = y0 h1 + x0 h2 .
Exemplo 2: Consideremos f (x, y) = x/y, y 6= 0. Então podemos
escrever
f (x0 + h1 , y0 + h2 ) =
x0
1
h2 (x0 h2 − y0 h1 )
+ 2 (y0 h1 − x0 h2 ) +
.
y0
y0
y02 (y0 + h2 )
Como L(h) = (1/y02 )(y0 h1 − x0 h2 ) é linear em h e a função ε(h) =
h2 (x0 h2 − y0 h1 )/y02 (y0 + h2 ) satisfaz
p
|ε(h)|
x2 + y02
≤ 2 0
khk → 0
khk
y0 (y0 + h2 )
se
h → 0,
64
Cálculo Avançado I
temos que f é diferenciável em (x0 , y0 ) e
f ′ (x0 , y0 )h =
1
(y0 h1 − x0 h2 ).
y02
Exemplo 3: Seja f : Rn → R uma função linear. Então f (x0 + h) =
f (x0 ) + f (h). Se considerarmos ε(h) = 0 para todo h ∈ Rn , então
a identidade (5.2) fica satisfeita com L(h) = f (h), o que nos leva a
concluir que f é diferenciável em x0 e f ′ (x0 ) ≡ f .
Exemplo 4: Consideremos f : Rn → R definida por f (x) = kxk22 .
Então
f (x0 + h) = kx0 + hk22 = kx0 k22 + h2x0 : hi + khk22 .
Como a aplicação h 7→ h2x0 : hi é linear e ε(h) = khk22 satisfaz
|ε(h)|
= khk2 → 0
khk2
se
h → 0,
segue que f é diferenciável em x0 e f ′ (x0 )(h) = h2x0 : hi.
O resultado a seguir estabelece a unicidade da diferencial de uma
função.
Lema 5.4: Se f é função diferenciável em x0 ∈ Ω e L1 e L2 são
diferenciais de f , então L1 = L2 .
Prova: Suponhamos que para todo h ∈ Rn ,
f (x0 + h) = f (x0 ) + L1 (h) + ε1 (h)
f (x0 + h) = f (x0 ) + L2 (h) + ε2 (h)
(5.4)
com L1 e L2 lineares e ε1 e ε2 funções o(khk).
Então, subtraindo a primeira identidade da segunda em (5.4), temos
L1 (h) − L2 (h) = ε2 (h) − ε1 (h).
Considerando h = λei , onde λ > 0, temos
|L1 (ei ) − L2 (ei )| ≤
|ε1 (λei )| |ε2 (λei )|
+
.
λ
λ
Funções Diferenciáveis
65
Fazendo λ tender a zero, concluı́mos que L1 (ei ) = L2 (ei ) para i =
1, . . . , n. Portanto L1 ≡ L2 .
Exemplo 5: Seja f : R2 → R a função definida por (veja Figura 5.2)
f (x, y) =
(
p
|x|y
x2 + y 2
0
se (x, y) 6= (0, 0),
senão.
É fácil ver (veja Exercı́cios) que f é contı́nua e Gateaux-derivável em
(0, 0). No entanto, f não é diferenciável em (0, 0).
Figura 5.2
Exemplo 6: Seja f : R2 → R a função definida por (veja Figura 5.3)
f (x, y) =
(
2y|x|x2
x4 + y 2
0
se (x, y) 6= (0, 0),
senão.
É fácil ver (veja Exercı́cios) que f é contı́nua e Gateaux-derivável em
∂f
(0, 0), com ∂u
(0, 0) = 0 para todo vetor unitário u ∈ R2 . No entanto,
f não é diferenciável em (0, 0).
66
Cálculo Avançado I
Figura 5.3
Proposição 5.5: Se f é diferenciável em x0 ∈ Ω, então f é contı́nua
em x0 .
Prova: Segue da definição que f (x0 + h) = f (x0 ) + L(h) + ε(h), onde
ε(h) é o(khk). Portanto, existe δ1 > 0 tal que se khk < δ1 , então
|ε(h)|
< 1.
khk
Como L é linear, segue da Proposição 4.25 que existe α ≥ 0 tal que
|L(h)| ≤ αkhk, ∀h ∈ Rn . Dado ε > 0, seja δ = min{δ1 , ε/(1 + α)}.
Então se x ∈ Ω é tal que kx − x0 k < δ, temos
|f (x) − f (x0 )| ≤ (1 + α)kx − x0 k < ε.
O vetor gradiente
Embora a existência das derivadas parciais de uma dada função
não implique a sua diferenciabilidade, a diferencial quando existe, é
dada pelas derivadas parciais, como veremos a seguir.
Se L: Rn → R é função linear, então existe b ∈ Rn tal que L(h) =
hb : hi para todo h ∈ Rn . De fato, seja {e1 , . . . , en } a base canônica
de Rn e bi = L(ei ). Então,
!
n
n
X
X
L(h) = L
hi ei =
hi bi = hb : hi.
i=1
i=1
Funções Diferenciáveis
67
Dizemos que b é a representação matricial de L relativamente à base
canônica.
Seja L = f ′ (x0 ) a diferencial de uma função f . Então, L(h) = hb :
hi para algum b ∈ Rn e para todo h ∈ Rn . Considerando h = λei
temos da definição 5.3
f (x0 + λei ) − f (x0 )
ε(λei )
= L(ei ) +
.
λ
λ
Fazendo λ tender a zero, concluı́mos que
f (x0 + λei ) − f (x0 )
∂f
(x0 ).
=
λ→0
λ
∂xi
L(ei ) = lim
Notação: O vetor de Rn
∇f (x0 ) =
∂f
∂f
(x0 ), . . . ,
(x0 )
∂x1
∂xn
é denominado vetor gradiente de f em x0 e é tal que se f é função
diferenciável em x0 , então
f ′ (x0 )(h) = ∇f (x0 ) : h ,
∀h ∈ Rn .
Vale repetir que a existência do vetor gradiente não implica a diferenciabilidade de uma função, mas se a função for diferenciável então
o vetor gradiente é a representação matricial de f ′ (x0 ) relativamente
à base canônica de Rn .
Observação: No caso unidimensional (n = 1), não existe distinção
entre derivável no sentido de Gateaux e derivável no sentido de
Fréchet. De fato, se f : R → R é derivável em x0 , então podemos
escrever
f (x0 + ∆x) = f (x0 ) + f ′ (x0 )∆x + ε(∆x)
e a aplicação linear ∆x 7→ f ′ (x0 )∆x fica unicamente determinada
pela existência da derivada de f em x0 .
68
Cálculo Avançado I
Regras básicas de derivação
Proposição 5.6: Sejam f, g: Ω → R duas funções diferenciáveis em
x0 . Então
a) f + g é diferenciável em x0 e (f + g)′ (x0 ) = f ′ (x0 ) + g ′ (x0 );
b) f g é diferenciável em x0 e (f g)′ (x0 ) = f (x0 )g ′ (x0 ) +g(x0 )f ′ (x0 );
c) se g(x0 ) 6= 0 então f /g é diferenciável em x0 e
(f /g)′ (x0 ) =
1
′
′
)f
(x
)
−
f
(x
)g
(x
)
.
g(x
0
0
0
0
g(x0 )2
Prova: Faremos a demonstração de (b); os outros itens são deixados
como exercı́cio para o leitor.
Por hipótese temos,
f (x0 + h) = f (x0 ) + L(h) + ε1 (h),
g(x0 + h) = g(x0 ) + G(h) + ε2 (h),
onde estamos denotando L = f ′ (x0 ) e G = g ′ (x0 ). Então podemos
escrever
f (x0 + h)g(x0 + h) = f (x0 )g(x0 ) + f (x0 )G(h) + g(x0 )L(h) + E(h),
onde
E(h) = f (x0 ) + L(h) ε2 (h) + g(x0 ) + G(h) ε1 (h) +
+ L(h)G(h) + ε1 (h)ε2 (h).
Como a aplicação h 7→ f (x0 )G(h) + g(x0 )L(h) é linear e |E(h)|/khk
tende a zero quando h tende a zero, segue-se o resultado.
Observação: Usando a representação matricial para a diferencial,
podemos expressar os três itens da Proposição 5.6 por
∇(f + g)(x0 ) = ∇f (x0 ) + ∇g(x0 )
∇(f g)(x0 ) = g(x0 )∇f (x0 ) + f (x0 )∇g(x0 )
1 ∇(f /g)(x0) =
g(x0 )∇f (x0 ) − f (x0 )∇g(x0 )
g(x0 )2
Funções Diferenciáveis
69
Funções diferenciáveis: o caso vetorial
Antes de definirmos a diferencial de uma função f : Ω ⊂ Rn → Rm ,
lembremos alguns fatos básicos da Álgebra Linear.
Observação 1: Se L: Rn → Rm é uma transformação linear, fixadas
as bases canônicas de Rn e Rm , existe uma matriz m × n A = [aij ]
tal que
L(x) = Ax, ∀x ∈ Rn .
Dizemos que A é a matriz associada à transformação L ou representação matricial (ou representação em coordenadas) de L relativamente à base canônica.
Representaremos a matriz associada a uma transformação L por
[L].
Observação 2: Se L1 : Rn → Rm e L2 : Rm → Rk são duas transformações lineares, então podemos definir L2 ◦ L1 : Rn → Rk e
[L2 ◦ L1 ] = [L2 ][L1 ].
Definição 5.7: Uma função f : Ω → Rm é dita diferenciável (ou
Fréchet-derivável) em x0 ∈ Ω se existem funções L, εx0 : Rn → Rm
tais que
f (x0 + h) = f (x0 ) + L(h) + εx0 (h),
(5.5)
com L linear e εx0 função o(khk), isto é, satisfazendo
kεx0 (h)k
= 0.
h→0
khk
lim
(5.6)
Para simplificar a notação, escreveremos simplesmente ε(h), deixando
de explicitar a dependência de ε em x0 .
Se f é função diferenciável em x0 , então a transformação linear L
é denominada a diferencial de f em x0 (ou a derivada de Fréchet de
f em x0 ) que denotamos por f ′ (x0 ).
Lema 5.8: Uma função f : Ω → Rm , f = (f1 , . . . , fm ) é diferenciável
em x0 se e somente se cada uma de suas componentes fi : Ω → R é
diferenciável em x0
70
Cálculo Avançado I
Prova: Se cada fi é diferenciável em x0 , então existem funções Li e
εi satisfazendo (5.2) tais que Li é linear e
|εi (h)|
= 0.
h→0 khk
lim
Sejam L = (L1 , . . . , Lm ) e ε = (ε1 , . . . , εm ). Então, é claro que
f (x0 + h) = f (x0 ) + L(h) + ε(h) e segue do Teorema 4.16 que
m
X |εi (h)|
kε(h)k
kε(h)k1
≤C
=C
→0
khk
khk
khk
i=1
se
h → 0.
Reciprocamente, se f é diferenciável em x0 , então existem funções
L = (L1 , . . . , Lm ) linear e ε = (ε1 , . . . , εm ) satisfazendo (5.5) e (5.6).
Como cada Li é linear e
kε(h)k1
|εi (h)|
≤
,
khk
khk
temos o resultado.
A matriz jacobiana
Se f : Ω → Rm é uma função diferenciável em x0 ∈ Ω, então sua
diferencial (ou sua derivada de Fréchet) f ′ (x0 ) é uma transformação
linear de Rn em Rm . A matriz associada a f ′ (x0 ) relativamente às
bases canônicas de Rn e Rm é dada por
∂f
1
(x )
∂x1 0
′
..
f (x0 ) =
.
∂fm
(x )
∂x1 0
∂f1
(x )
∂x2 0
..
.
∂fm
(x )
∂x2 0
...
..
.
...
∂f1
(x0 )
∂xn
..
.
∂fm
(x0 )
∂xn
Observe que as linhas de [f ′ (x0 )] são formadas pelos gradientes de
cada fi em x0 .
No caso em que m = n a matriz f ′ (x0 ) é denominada matriz
Jacobiana de f em x0 . O seu determinante é denominado Jacobiano
Funções Diferenciáveis
71
de f em x0 e o seu traço é denominado Divergente de f em x0 , que
denotamos respectivamente por
Jf (x0 ) = det f ′ (x0 )
e
n
′
X
∂fi
div f (x0 ) = tr f (x0 ) =
(x0 ).
∂x
i
i=1
Observação: Se Jf (x0 ) 6= 0, então a matriz f ′ (x0 ) é invertı́vel.
Como f ′ (x0 ) aproxima f (x) − f (x0 ) na vizinhança de x0 , seria razoável esperar que f também fosse invertı́vel nas proximidades de
x0 . De fato é quase isso, como veremos mais à frente no estudo do
Teorema da Função Inversa. O Jacobiano e o Divergente também
desempenham papel importante na integração de funções de várias
variáveis.
A regra da cadeia
A regra para derivar funções compostas é tradicionalmente denominada Regra da Cadeia, embora em português talvez fosse mais intuitivo denominar regra da corrente, tendo-se em vista a analogia da
regra com a composição dos elos que formam a corrente.
Teorema 5.9: (Regra da Cadeia) Sejam Ω subconjunto aberto de
Rn e A subconjunto aberto de Rm . Suponha f : Ω → Rm e g: A → Rk
duas funções tais que f (Ω) ⊂ A. Se f é diferenciável em x0 e g é
diferenciável em y0 = f (x0 ), então g ◦ f é diferenciável em x0 e
(g ◦ f )′ (x0 ) = g ′ (y0 ) ◦ f ′ (x0 ).
Em particular
(g ◦ f )′ (x0 ) = g ′ (y0 ) f ′ (x0 ) .
Prova: Sejam L = f ′ (x0 ) e G = g ′ (y0 ). Então
f (x0 + h) = f (x0 ) + L(h) + εf (h) ∀h ∈ Rn
g(y0 + k) = g(y0 ) + G(k) + εg (k) ∀k ∈ Rm
onde εf e εg satisfazem (5.6).
72
Cálculo Avançado I
Portanto, podemos escrever
g f (x0 + h) = g f (x0 ) + G L(h) + ε(h),
onde ε: Rn → Rk é definida por ε = G ◦ εf + εg ◦ (L + εf ).
Além disso,
kG εf (h) k
kεg L(h) + εf (h) k
kε(h)k
≤
+
.
khk
khk
khk
Pela Proposição 4.25, podemos escrever
kεf (h)k
kεg (k)k kkk
kε(h)k
≤α
+
,
khk
khk
kkk khk
onde k = L(h) + εf (h).
Como kkk ≤ αkhk + kεf (h)k, temos
kεf (h)k
kεg (k)k
kε(h)k
≤α
+
khk
khk
kkk
kεf (h)k
α+
.
khk
e concluı́mos o resultado, visto que kkk → 0 quando khk → 0.
O teorema do valor médio
O Teorema do Valor Médio se estende para o caso de funções de Rn
em R e sua demonstração é consequência direta da Regra da Cadeia,
como se vê na prova do resultado a seguir.
Teorema 5.10: Seja f : Rn → R uma função diferenciável e x1 e x2
dois pontos de Rn . Então existe x sobre o segmento de reta que liga
x1 a x2 tal que
f (x2 ) − f (x1 ) = ∇f (x) : x2 − x1 .
Prova: Consideremos γ: R → Rn a parametrização γ(t) = x1 +
t(x2 − x1 ) da reta que passa por x1 e x2 . É fácil ver que γ é função
diferenciável e γ ′ (t0 ) = x2 − x1 para todo t0 ∈ R.
Funções Diferenciáveis
73
Seja g: R → R a função real definida pela composição g(t) =
f γ(t) . Pelo Teorema 5.9, g é função derivável e g ′ (t) = ∇f γ(t) :
x2 −x1 . Pelo Teorema do Valor Médio parafunções
reais de variável
′
real, g(1) − g(0) = g (t0 ) para algum t0 ∈ 0, 1 . Assim denotando
por x = γ(t0 ), segue o resultado.
Observação: O Teorema do Valor Médio não vale para funções
f : Rn → Rm , se m > 1. Em particular, não vale para curvas em
Rm .
Derivadas parciais (o caso vetorial)
Seja f : Rn → Rm uma função diferenciável
em x0 . Então a diferencial f ′ (x0 ) fica determinada pela matriz f ′ (x0 ) . Se Rn = Rk × Rl
e x = (y, z) = (y1 , . . . , yk , z1 , . . . , zl ), então podemos escrever
∂f1
∂f1
∂f1
∂f1
(x0 ) · · ·
(x0 )
(x0 ) · · ·
(x0 )
∂yk
∂z1
∂zl
′
∂y1
..
..
..
..
..
..
f (x0 ) =
.
.
.
.
.
.
∂fm
∂fm
∂fm
∂fm
(x0 ) · · ·
(x0 )
(x0 ) · · ·
(x0 )
∂y1
∂yk
∂z1
∂zl
Se considerarmos os blocos B e C definidos respectivamente por
∂f1
(x ) · · ·
∂y1 0
..
..
.
.
∂fm
(x0 ) · · ·
∂y1
∂f1
∂f1
(x0 )
∂z1 (x0 )
∂yk
..
..
,
.
∂fm.
∂fm
(x0 )
(x0 )
∂yk
∂z1
então para todo h = (h1 , h2 ) ∈ Rk × Rl , temos
···
..
.
···
∂f1
(x0 )
∂zl
..
.
∂fm
(x0 )
∂zl
f ′ (x0 )h = Bh1 + Ch2 .
As transformações lineares associadas às submatrizes B e C são denominadas derivadas parciais de f em x0 com relação respectivamente
a y e z e denotamos
∂f
∂f
B=
(x0 ) ,
C=
(x0 ) .
∂y
∂z
74
Cálculo Avançado I
Com esta notação podemos escrever
f ′ (x0 )h =
∂f
∂f
(x0 )h1 +
(x0 )h2 .
∂y
∂z
Com a notação das derivadas parciais, a Regra da Cadeia toma a
seguinte forma
Teorema 5.11: Seja f : Rk × Rl → Rm uma função diferenciável em
(x0 , y0 ). Sejam ϕ: Rn1 → Rk e ψ: Rn2 → Rl funções diferenciáveis
tais que ϕ(u0 ) = x0 e ψ(v0 ) = y0 . Então g: Rn1 +n2 → Rm definida
por g(u, v) = f ϕ(u), ψ(v) é diferenciável em (u0 , v0 ) e
∂f
g (u0 , v0 ) =
(x0 , y0 )
∂x
′
∂ϕ
∂f
∂ψ
(u0 ) +
(x0 , y0 )
(v0 ) .
∂u
∂y
∂v
Condições suficientes para a diferenciabilidade
Pelo que vimos até agora, só dispomos da definição para verificar
se uma dada função é diferenciável. O Teorema a seguir fornece uma
condição suficiente para a diferenciabilidade de uma dada função.
Teorema 5.12: Seja Ω ⊂ Rn aberto e f : Ω → R uma função cujas
derivadas parciais existem em Ω e são contı́nuas em um ponto x0 de
Ω. Então f é diferenciável em x0 .
Prova: À guisa de simplicidade, faremos a demonstração no caso
n = 2; o caso geral segue por argumento análogo.
Seja h = (h1 , h2 ) = h1 e1 + h2 e2 , tal que x0 + h ∈ Ω, onde {e1 , e2 }
é a base canônica de R2 . Então
f (x0 + h) − f (x0 ) = f (x0 + h) − f (x0 + h1 e1 ) + f (x0 + h1 e1 ) − f (x0 ).
(5.7)
Como f possui derivadas parciais em Ω, a função g2 (t) = f (x0 +
h1 e1 + th2 e2 ) é derivável em ]0, 1[. Pelo Teorema do Valor Médio,
existe ξ2 ∈ ]0, 1[ tal que g2 (1) − g2 (0) = g2′ (ξ2 ), isto é,
f (x0 + h1 e1 + h2 e2 ) − f (x0 + h1 e1 ) =
∂f
(x0 + h1 e1 + ξ2 h2 e2 )h2 .
∂x2
Funções Diferenciáveis
75
Analogamente, a função g1 (t) = f (x0 + th1 e1 ) é derivável em ]0, 1[.
Logo, existe ξ1 ∈ ]0, 1[ tal que
f (x0 + h1 e1 ) − f (x0 ) =
∂f
(x0 + ξ1 h1 e1 )h1 .
∂x1
Portanto,
f (x0 + h) − f (x0 ) =
∂f
∂f
(x0 + ξ1 h1 e1 )h1 +
(x0 + h1 e1 + ξ2 h2 e2 )h2 .
∂x1
∂x2
Denotando
∂f
∂f
ε(h) =
(x0 + ξ1 h1 e1 ) −
(x0 ) h1
∂x1
∂x1
∂f
∂f
+
(x0 + h1 e1 + ξ2 h2 e2 ) −
(x0 ) h2 ,
∂x2
∂x2
(5.8)
temos
f (x0 + h) = f (x0 ) + ∇f (x0 ) : h + ε(h).
Para concluir que f é diferenciável, basta mostrar que ε(h) é de ordem
o(khk).
Por hipótese, dado ε > 0, existe δ > 0 tal que se x ∈ Bδ (x0 ), então
|
∂f
∂f
(x) −
(x0 )| < ε,
∂xi
∂xi
i = 1, 2.
Portanto, se khk < δ, segue de (5.8)
|ε(h)| < ǫ|h1 | + ǫ|h2 | = ǫkhk1
e consequentemente,
|ε(h)|
<ǫ
khk1
e o resultado segue da equivalência das normas em Rn .
Observação: Vale observar que o Teorema 5.12 dá somente condição
suficiente para a diferenciabilidade. De fato, uma função pode ser
diferenciável num ponto x0 , mesmo tendo suas derivadas parciais
76
Cálculo Avançado I
descontı́nuas em x0 . Por exemplo, consideremos f : R2 → R definida
por
1
2
f (x, y) = x sen x se x 6= 0,
0
se x = 0.
Então, calculando diretamente
∂f
(x, y) =
∂x
1 − cos 1
2x sen x
x
0
se x 6= 0,
se x = 0,
verifica-se que ∂f
∂x (x, y) é descontı́nua nos pontos (0, y) para todo y ∈
R. Por outro lado, é fácil ver (verifique!) que f é função diferenciável
em (0, 0) e f ′ (0, 0) = (0, 0).
Funções diferenciáveis: o caso geral
As definições de diferenciabilidade apresentadas nas seções anteriores podem ser estendidas naturalmente para funções f definidas e
tomando valores em espaços vetoriais normados gerais. Mais precisamente, sejam V e W espaços vetoriais sobre os quais estejam definidas
respectivamente as normas k kV e k kW .
Definição 5.13: Uma função f : V → W é dita diferenciável (ou
Fréchet-derivável) em x0 ∈ V se existem funções L, εx0 : V → W tais
que
f (x0 + h) = f (x0 ) + L(h) + εx0 (h),
(5.9)
com L é linear contı́nua e εx0 função o(khkV ), isto é, satisfazendo
kεx0 (h)kW
= 0.
h→0
khkV
lim
(5.10)
Como antes, é usual denotar L = f ′ (x0 ) e escrever ε(h), deixando de
explicitar a dependência de ε em x0 .
Deixamos a cargo do leitor verificar que os resultados e as respectivas demonstrações apresentados no Lema 5.4, nas Proposições 5.5
e 5.6(a) e no Teorema 5.9 seguem válidos no caso geral. Além disso,
com os mesmos argumentos do Exemplo 3, temos:
Funções Diferenciáveis
77
Proposição 5.14: Se f : V → W é uma função linear e contı́nua,
então f é diferenciável em todo ponto x0 ∈ V e f ′ (x0 ) = f .
Observe que a hipótese da continuidade na proposição acima é
necessária, caso a dimensão de V não seja finita.
A tı́tulo de exemplo, seja W = R, V = Mn×n o espaço das matrizes
quadradas de ordem n munido na norma k k2 introduzida em (2.6) e
consideremos as funções traço e determinante definidas em V , isto é,
f : V → R,
g: V → R,
f (A) = tr(A),
g(A) = det(A).
Como f é linear (e necessariamente contı́nua porque a dimenão
de V é finita), segue da Proposição 5.14 que f é diferenciável em
toda A ∈ V e f ′ (A)H = f (H), para todo H ∈ V . Para a função
determinante, temos:
Proposição 5.15: Se det(A) 6= 0, então g é diferenciável em A e
g ′ (A)H = det(A) tr(A−1 H).
(5.11)
Prova: Por simplicidade, faremos a demostração no caso n = 3. O
caso geral, que depende de propriedades do determinante de ordem
n, foge ao escopo deste texto.
Vamos dividir a prova em duas etapas.
Etapa 1: Se A = I e H ∈ V , um cálculo direto nos dá
g(I + H) = 1 + tr(H) + P2 (H) + P3 (H),
onde P3 (H) = det(H) e
P2 (H) =
h11
h21
h12
h
+ 11
h22
h31
h13
h
+ 22
h33
h32
h23
,
h33
onde hij denotam os coeficinetes de H. Pela desigualdade de Young
(4.9) (veja Exercı́cio 4.3), temos,
|P2 (H)| ≤ kHk22 e |P3 (H)| ≤
2
kHk33 ,
3
78
Cálculo Avançado I
onde k k2 e k k3 são as normas definidas em (2.6) para p = 2 e
p = 3 respectivamente. Como as normas em V são equivalentes,
existe α > 0 tal que
kHk3 ≤ αkHk2
⇒
|P3 (H)| ≤ α3 kHk32 .
Denotando-se εI (H) = P2 (H) + P3 (H), segue que
|εI (H)|
≤ kHk2 + α3 kHk22 ,
kHk2
de onde se conclui que εI (H) é o(kHk2 ) e consequentemente, g é
diferenciável em I, com a diferencial dada pela função linear traço,
isto é, g ′ (I) = f .
Etapa 2: Sejam A, H ∈ V , com det(A) 6= 0. Lembrando que
det(AB) = det(A) det(B) qualquer que seja B ∈ V , segue da Etapa 1,
g(A + H) = g A(I + A−1 H) = g(A)g(I + A−1 H)
= g(A) 1 + tr(A−1 H) + P2 (A−1 H) + P3 (A−1 H)
= g(A) + det(A) tr(A−1 H) + det(A)P2 (A−1 H) + det(H).
Denotando
εA (H) = det(A)P2 (A−1 H) + det(H),
segue da etapa anterior e do Exercı́cio 2.9(c),
|P2 (A−1 H)| ≤ kA−1 Hk22 ≤ kA−1 k22 kHk22 ,
de modo que
|εA (H)| ≤ | det(A)|kA−1 k22 kHk22 + α3 kHk32 .
Logo εA (H) é o(kHk2 ) e como H 7→ det(A) tr(A−1 H) é linear, concluı́mos a prova.
Observação: Com a mesma demostração, a Proposição 5.15 (e consequentemente a fórmula (5.11)) é verdadeira para n ∈ N qualquer. A
única dificuldade reside na prova da seguinte identidade: para qualquer matriz H de ordem n × n, temos
det(I + H) = 1 + tr(H) + P2 (H) + · · · + Pn (H),
Funções Diferenciáveis
79
onde Pk (H), k = 2, 3, . . . , n, é um polinômio homogêneo de grau k
nos coeficientes hij de H.
Observação: A hipótese det(A) 6= 0 na Proposição 5.15 não é
necessária. Veja Exercı́cios.
Observação: Lembrando que hA : Bi = tr(AT B) define um produto
interno no espaço Mn×n (veja Exercı́cio 2.9), se A é invertı́vel e
g(A) = det(A), então g ′ (A) = det(A)A−T , visto que
g ′ (A)(H) = det(A) tr(A−1 H) = det(A)hA−T : Hi,
∀H ∈ Mn×n .
Corolário
5.16: Seja A : R → Mn×n função diferenciável, tal que
det A(t0 ) 6= 0. Então, existe δ > 0 tal
que a função ψ : (t0 − δ, t0 +
δ) → R definida por ψ(t) = det A(t) é derivável e
ψ ′ (t) = det A(t) tr A(t)−1 A′ (t) .
(5.12)
Prova: Consequência imediata da regra da Cadeia.
A diferencial: funções de classe C1
Se f : Ω ⊂ Rn → Rm é uma função diferenciável em cada ponto
x do seu domı́nio, então podemos considerar a função linear f ′ (x),
diferencial de f em x. Temos assim a aplicação
f ′ : Ω →L(Rn , Rm ),
x 7→f ′ (x),
onde L(Rn , Rm ) denota o espaço de todas as aplicações lineares de
Rn em Rm . f ′ é denominada a função diferencial de f (ou função
derivada de Fréchet de f ).
Observe que, fixada uma base nos espaços Rn em Rm , como por
exemplo a base canônica, então cada elemento T de L(Rn , Rm ) pode
ser representado por uma matriz [T ] de Mm×n .
Exemplo 1: Se f (x, y) = (xy, x2 + y 2 ) então f ′ : R2 → L(R2 , R2 ) é
dada por
y
x
′
[f (x, y)] =
2x 2y
80
Cálculo Avançado I
Exemplo 2: Se f : Rn → R é definida por f (x) = kxk22 , então
f ′ (x) = 2x para todo x ∈ Rn . Logo f ′ ≡ 2I, onde I denota a
função identidade de Rn em Rn .
Se m = 1, então o espaço L(Rn , R) pode ser identificado com Rn (ou
mais precisamente com M1×n ), isto é, L(Rn , Rm ) ∼
= Rn . Neste caso,
se f : Ω → R é função diferenciável, podemos fazer a identificação
f ′: Ω →
x
7→
Rn ,
∇f (x).
Definição 5.17: Dizemos que uma função diferenciável f : Ω → Rm
é de Classse C 1 (ou continuamente diferenciável) em x0 ∈ Ω se f ′ é
função contı́nua em x0 . Dizemos que f é de classe C 1 em Ω se f ′ é
função contı́nua em todos os pontos de Ω.
Como já vimos anteriormente, uma função f pode possuir derivadas
parciais e não ser diferenciável. De fato, pode nem mesmo ser contı́nua (veja (5.1)). Entretanto, se f é uma função convexa e possui
derivadas parciais, então ela é necessariamente de classe C 1 .
Teorema 5.18: Seja Ω um aberto convexo de Rn e f : Ω → R uma
função convexa que possui derivadas parciais em todos os pontos de
Ω. Então f é de classe C 1 .
Prova: Como f é convexa, então
f λy + (1 − λ)x ≤ λf (y) + (1 − λ)f (x)
(5.13)
para todo x, y ∈ Ω e 0 ≤ λ ≤ 1. Seja K um subconjunto compacto de
Ω. Então existe δ > 0 tal que x + sei ∈ Ω para todo x ∈ K, |s| < δ,
e i = 1, 2, . . . , n, onde {e1 , . . . , en } é a base canônica de Rn . Assim,
para y = x + sei obtemos de (5.13)
f (x + λsei ) − f (x)
≤ f (x + sei ) − f (x).
λ
Passando ao limite nesta desigualdade quando λ → 0+ temos que
s∇f (x) · ei ≤ f (x + sei ) − f (x).
Funções Diferenciáveis
81
Como esta desigualdade também é válida substituindo s por −s,
segue que se s ∈]0, δ[, então
f (x) − f (x − sei )
f (x + sei ) − f (x)
≤ ∇f (x) · ei ≤
s
s
(5.14)
para todo x ∈ K e i = 1, . . . , n.
Se f não é C 1 , então existe ε > 0, x0 ∈ Ω e uma sequência {xk }k≥1
em Ω tal que xk → x0 e
|∇f (xk ) − ∇f (x0 )| > ε,
∀k.
(5.15)
Seja K = {x0 , x1 , x2 , . . .}. Se |s| < δ/2 e k é suficientemente grande,
então xk ± sei ∈ Ω e como f é contı́nua em Ω (veja Exercı́cio 4.11),
segue de (5.14) que a sequência {∇f (xk ) · ei } é limitada, para cada
i = 1, . . . , n. Portanto, passando a uma subsequência se necessário,
podemos supor que existe u ∈ Rn tal que ∇f (xk ) → u. Passando ao
limite quando k → ∞ em (5.14), temos, para s ∈]0, δ/2[ e i = 1, . . . , n,
f (x0 + sei ) − f (x0 )
f (x0 ) − f (x0 − sei )
≤ u · ei ≤
.
s
s
(5.16)
Fazendo s → 0+ em (5.16) obtemos ∇f (x0 ) = u, o que está em
contradição com (5.15). Portanto, x 7→ ∇f (x) é contı́nua em Ω.
A projeção ortogonal
A Projeção Ortogonal sobre um convexo fechado C de Rn que introduzimos no Capı́tulo 4 (veja Exercı́cio 4.15) é fundamental na
Análise Convexa e surge com frequência nas aplicações. Vamos encerrar este Capı́tulo mostrando uma propriedade importante: que elas
são derivadas de Fréchet de funções reais definidas em Rn .
Teorema 5.19: Seja C um conjunto convexo e fechado de Rn e
considere a função f : Rn → R definida por
1
f (x) = x − PC (x) : PC (x) ,
2
(5.17)
82
Cálculo Avançado I
onde PC : Rn → Rn é a projeção ortogonal sobre C definida em (4.11).
Então f é função de classe C 1 em Rn e f ′ = PC .
Prova: Sejam x0 e h em Rn . Então podemos escrever
f (x0 + h) = f (x0 ) + PC (x0 ) : h + ε(h),
onde
ε(h) =
1
1
kPC (x0 )k22 − kPC (x0 +h)k22 + x0 +h : PC (x0 +h)−PC (x0 ) .
2
2
Como g(x) = 12 kxk22 é diferenciável com g ′ (x) = x para todo x ∈ Rn ,
temos do Teorema do Valor Médio,
1
1
kPC (x0 )k22 − kPC (x0 + h)k22 =
2
2
(1 − θ)PC (x0 ) + θPC (x0 + h) : PC (x0 ) − PC (x0 + h) ,
para algum θ ∈ ]0, 1[. Logo,
ε(h) = x0 − PC (x0 ) : PC (x0 + h) − PC (x0 )
− θkPC (x0 + h) − PC (x0 )k22
(5.18)
+ h : PC (x0 + h) − PC (x0 ) .
Como as duas primeiras parcelas do lado direito de (5.18) são negativas (veja Exercı́cio 4.15(b)), temos
ε(h) ≤ khk2 kPC (x0 + h) − PC (x0 )k2 ≤ khk22 .
Por outro lado, considerando ν = 1 − θ, temos
ε(h) = νPC (x0 ) + (1 − ν)PC (x0 + h) : PC (x0 ) − PC (x0 + h)
+ x0 + h : PC (x0 + h) − PC (x0 )
= x0 + h − PC (x0 + h) : PC (x0 + h) − PC (x0 )
+ νkPC (x0 ) − PC (x0 + h)k22 ≥ 0
Portanto, 0 ≤ ε(h) ≤ khk22 e temos a conclusão.
Observação: Embora estejamos nos referindo às projeções sobre
convexos fechados de Rn , é imediato verificar que a demonstração
acima é válida para qualquer espaço de Hilbert V , isto é, qualquer
espaço de Banach cuja norma seja proveniente de um produto interno.
Funções Diferenciáveis
83
Exercı́cios
Exercı́cio 5.1. Sejam ψ, ϕ: R → R com ϕ satisfazendo
lim ϕ(s) = 0.
s→±∞
Considere f : R2 → R definida por
f (x, y) =
ϕ(y/x2 )ψ(|x|) se x 6= 0
0
se x = 0
(5.19)
a) Considere ψ(s) = s. Mostre que f é Gateaux-derivável em (0, 0)
com
∂f
(0, 0) = 0 ∀u ∈ R2 vetor unitário ,
∂u
mas f não é diferenciável em (0, 0).
b) Verifique que a função f do Exemplo 6 deste capı́tulo é obtida
de (5.19) com ϕ(s) = 2s/(1 + s2 ) e ψ(s) = s.
c) Sejam ψ(s) = 1 ∀s ≥ 0 e ϕ = 1[1,2] a função caracterı́stica de
[1, 2], isto é, ϕ(s) = 1 se s ∈ [1, 2] e ϕ(s) = 0 senão. Esboce o
gráfico de f e mostre que f definida por (5.19) satisfaz o item
(a) mas f não é contı́nua em (0, 0).
Exercı́cio 5.2.
a) Considere f : Rn → R dada por f (x) = 12 kxk22 . Mostre que f é
diferenciável e que f ′ : Rn → Rn é a matriz identidade I.
b) Seja f : Rn → R dada por f (x) = p1 kxkpp , com 1 < p < ∞. Mostre
que f é diferenciável. Mostre que kf ′ (x)kqq = kxkpp , ∀x ∈ Rn e
1/p + 1/q = 1.
Exercı́cio 5.3. Sejam f, g: Rn → Rn funções diferenciáveis e considere F (x) = f (x) : g(x) , onde h : i denota o produto escalar usual
em Rn . Mostre que F é diferenciável e calcule F ′ (x).
Exercı́cio 5.4. Seja A matriz n × n, g: Rn → R função diferenciável
e defina F (x) = g(Ax). Mostre que F ′ (x) = AT g ′ (Ax), ∀x, onde AT
é a transposta de A.
84
Cálculo Avançado I
Observe que, em particular, se F (x) = 12 kAxk22 , então F ′ : Rn → Rn
é dada por F ′ = AT A.
Exercı́cio 5.5. Seja F (x) = hAx : xi, ∀x ∈ Rn . Mostre que F ′ =
AT + A. Calcule G′ para G(x) = hAx : Bxi, A e B matrizes n × n.
Exercı́cio 5.6. Uma função f : Rn → R é p-homogênea se f (λx) =
λp f (x), ∀λ > 0 e ∀x ∈ Rn .
a) Dê exemplo de função p-homogênea. Existe função p-homogênea
descontı́nua?
b) Mostre que uma função 1-homogênea é diferenciável em x = 0
se, e somente se, é linar.
c) Mostre que toda função p-homogênea diferenciável satisfaz a
relação x : ∇f (x) = pf (x). Reciprocamente, se x : ∇f (x) =
pf (x), ∀x ∈ Rn , então f é p-homogênea.
Exercı́cio 5.7. Sabemos que o TVM é válido para funções diferenciáveis de Rn em R, isto é; se x1 , x0 ∈ Rn , então existe t ∈ ]0, 1[ tal
que
f (x1 ) − f (x0 ) = f ′ (xt )(x1 − x0 ) = ∇f (xt ) : x1 − x0 ,
onde xt = x0 + t(x1 − x0 ).
a) Verifique que o TVM não vale para funções de Rn em Rm se
m > 1.
b) Mostre que vale a Desigualdade do Valor Médio: se f : Rn → Rn ,
então
kf (x1 ) − f (x0 )k2 ≤ kf ′ (xt )(x1 − x0 )k2 .
Em particular, vale a desigualdade
kf (x1 ) − f (x0 )k2 ≤ kf ′ (xt )kk(x1 − x0 )k2 ,
onde estamos denotando
kf ′ (x)k = sup{kf ′ (x)hk2 ; khk2 = 1}.
Sug.: Considere h(t) = f (x0 + t(x1 − x0 )) : f (x1 ) − f (x0 ) .
Funções Diferenciáveis
85
Exercı́cio 5.8. Seja B = B1 (0) a bola unitária de Rn e f : B →
B uma função de classe C 1 . Suponha que existe α > 0 tal que
kf ′ (x)hk2 ≤ αkhk2 , ∀x ∈ B1 (0) e ∀h ∈ Rn . Prove que
kf (x) − f (y)k2 ≤ αkx − yk2 ,
∀x, y ∈ B.
Exercı́cio 5.9. Seja f : Rn → Rm função de classe C 1 . Mostre que:
f (x0 + h) − f (x0 ) =
Z
1
f ′ (x0 + th)h dt.
0
Obs.: Se γ(t) = γ1 (t), . . . , γm (t) , define-se
Z
a
b
γ(t) dt =
Z
a
b
γ1 (t) dt, . . . ,
Z
b
γm (t) dt
a
(5.20)
Exercı́cio 5.10. Seja f : R2 \ {0} → R2 contı́nua satisfazendo:
(1) x e f (x) são linearmente dependentes para todo x ∈ R2 \{0}.
(2) kxk2 kf (x)k2 = 1, ∀x ∈ R2 \ {0}.
a) Determine f (x). Mostre que f é diferenciável e determine f ′ (x).
b) Se C ⊂ R2 é uma circunferência que não passa pela origem,
determine f (C). Quem é f (C) se C passa pela origem?
Exercı́cio 5.11. Seja V = Mn×n o espaço das matrizes n×n munido
da norma induzida (veja (4.12)) por uma norma qualquer de Rn .
Considere f : V → V a função definida por f (X) = X 2 . Mostre que
f é diferenciável em V e calcule f ′ (X)H para toda H ∈ V . Cuidado!
f ′ (X) 6= 2X. Faça o mesmo para f (X) = X 3 .
Exercı́cio 5.12. Seja Ω aberto de Rn e f : Ω → Rm uma função de
classe C 1 em Ω. Mostre que ε: Ω × Rn → Rm definida por
ε(x, h) = f (x + h) − f (x) − f ′ (x)h
é contı́nua em Ω × Rn . Mostre também que
kε(x, h)k
=0
h→0
khk
lim
86
Cálculo Avançado I
uniformemente nos compactos de Ω. Mais precisamente, mostre que
se K ⊂ Ω é um conjunto compacto e ε > 0, então existe δ > 0
(independente de x ∈ K) tal que
khk < δ
=⇒
kε(x, h)k
< ε,
khk
∀x ∈ K.
(5.21)
Exercı́cio 5.13. Seja Ω aberto de R2 e f : Ω → R uma função de
classe C 1 em Ω. Seja R ⊂ Ω o retângulo R = [a, b] × [c, d]. Considere
g: [a, b] → R definida por
g(x) =
Z
d
f (x, y) dy.
c
Mostre que g é diferenciável em ]a, b[ e que para todo x0 ∈ ]a, b[,
′
g (x0 ) =
Z
c
d
∂f
(x0 , y) dy.
∂x
Exercı́cio 5.14. Calcule PC (x) e f (x) definida por (5.17) para cada
um dos seguintes convexos:
(a) C = [0, +∞[;
(b) C = [0, 1];
(c) C = [0, +∞[ ×[0, +∞[
(d) C = BR (0) a bola de raio R e centro em zero de Rn .
Descreva o operador de projeção PC nos três primeiros casos acima
usando a notação
x+ = max{x, 0} =
x + |x|
.
2
Exercı́cio 5.15. Seja f : U ⊂ Rn → R função Lipschitz, U aberto e
x0 ∈ U . Suponha que, para todo h ∈ Rn , existe o limite
f (x0 + λh) − f (x0 )
λ→0
λkhk
g(h) = lim
(5.22)
Funções Diferenciáveis
87
e que a aplicação g: Rn → R definida por (5.22) é linear em h. Mostre
que f é diferenciável em x0 .
Exercı́cio 5.16. (a) Verifique diretamente a fórmula (5.12) no caso
n = 2, calculando a derivada do determinante
det A(t) = a11 (t)a22 (t) − a12 (t)a21 (t).
(b) Seja A(t) matriz n × n. Calcule
d
det A(t)−1 .
dt
Exercı́cio 5.17. Seja M2×2 (R) o espaço das matrizes quadradas de
ordem 2 e considere a função
g : M2×2 (R) → R,
g(A) = det(A).
Seja f : M2×2 (R) → M2×2 (R) definida por
a b
d
A=
7→ f (A) =
c d
−c
−b
a
.
Mostre que
g(A + H) = g(A) + tr f (A)H + det(H),
e conclua que g é diferenciável, com g ′ (A) = f (A)T . Observe que se
det(A) 6= 0, então f (A) = det(A)A−1 .
Exercı́cio 5.18. Seja SL2 (R) o espaço das matrizes simétricas de
ordem 2. Mostre que SL2 (R) é um subespaço vetorial de dimensão 3
do espaço M2×2 (R). Considere a aplicação
λi : SL2 (R) → R,
λi (A) = i-ésimo autovalor de A.
(a) Mostre que λi é diferenciável em SL2 (A) e calcule λ′i (A).
(b) Seja A ∈ SL2 (R) e suponha λ1 (A) > λ2 (A). Mostre que existe δ > 0 tal que as aplicações λi estão bem definidas na bola
Bδ (A) ⊂ M2×2 (R) e são diferenciáveis em A.
6
Curvas em Rn
Se imaginarmos uma partı́cula se deslocando no espaço, podemos
descrever sua posição (x, y, z) em cada instante t por equações
x = γ1 (t),
y = γ2 (t),
z = γ3 (t),
(6.1)
onde cada γi (t) é uma função real da variável real t, com t percorrendo
um dado intervalo I ⊂ R.
A trajetória da partı́cula é uma curva em R3 e (6.1) são denominadas equações paramétricas da curva (ou da trajetória), sendo t o
parâmetro.
Se denotarmos por γ: I → R3 a função dada por
γ(t) = γ1 (t), γ2 (t), γ3 (t) ,
então temos uma representação vetorial para as equações paramétricas e γ(I), a imagem de I por γ, é a curva de R3 sobre a qual a
partı́cula se desloca.
As considerações acima nos levam à seguinte definição para curvas
em Rn .
Definição 6.1: Seja I um intervalo de R e γ: I → Rn uma função
contı́nua. Dizemos que Γ = γ(I) é uma curva em Rn e que γ é uma
representação paramétrica ou uma parametrização da curva.
Se I = a, b é um intervalo fechado, dizemos que a curva tem
extremidades γ(a) e γ(b), ou que a curva liga os pontos x = γ(a) e
90
Cálculo Avançado I
y = γ(b). Se γ é uma função injetora em [a, b], dizemos que a curva
é simples ou que é um arco de Jordan. Se γ(a) = γ(b), dizemos que
a curva é fechada. Se γ é injetora em [a, b) e é fechada, dizemos que
é uma curva de Jordan.
Exemplo 1: Sejam u0 e v dois vetores de Rn e γ: R → Rn a função
definida por γ(t) = u0 + tv. Então γ(R) é a reta que passa por u0 e
é paralela a v. Em particular, se u0 = 0 γ é uma função linear.
Exemplo 2: Sejam I = 0, 2π e γ: I → R2 definida por γ(θ) =
(sen θ, cos θ). Então γ(I) é a circunferência unitária centrada na
origem de R2 .
Exemplo 3: Sejam I = 0, +∞ e γ: I → R3 definida por γ(θ) =
(e−θ cos θ, e−θ sen θ, e−θ ). Então γ(I) é uma espiral de R3 .
Exemplo 4: Como era de se esperar, todo gráfico de função real
contı́nua de uma variável real é uma curva. Com efeito, se f : I →
R é uma função contı́nua definida num intervalo I, então podemos
considerar a parametrização γ: I → R2 definida por γ(x) = x, f (x) .
Observação: A definição 6.1 acima inclui situações que fogem ao
senso comum. Por exemplo, seja γ(t) = (a1 , . . . , an ), para todo
t ∈ R, isto é, γ uma função constante. Como toda função constante é
contı́nua, temos um ponto como caso especial de curva de Rn (compare este exemplo com caso especial de sequência constante). Entretanto, dois pontos isolados não podem ser considerados uma curva
(justifique!).
Outro exemplo: consideremos uma mesa de sinuca de dimensões a
e b. A trajetória de uma bola
que
se
desloca sobre a mesa (aqui representada pelo retângulo 0, a × 0, b ) pode ser descrita por
uma
função
2
γ: I ⊂ R → R , cuja imagem γ(I) está contida em 0, a × 0, b .
Podemos imaginar uma situação ideal em que a ausência de atrito
permita que a bola (considerada um ponto), uma vez deslocada, permaneça em movimento sobre a mesa, refletindo-se nos bordos indefinidamente. Nestas circunstâncias, podemos provar que se a e b
satisfazem certas condições, a bola passa por quase todos os pontos
da mesa. Por exemplo, se a bola é lançada de algum ponto com inclinação de 45◦ e a/b ∈
/ Q, então para qualquer ponto P = (x, y) ∈
[0, a] × [0, b] e para cada ε > 0 existe t > 0 tal que kP − γ(t)k < ε.
n
Curvas em R
91
2
Portanto, γ: 0, ∞ → R
é
função
contı́nua
tal
que
γ
0,
∞
é um
cojunto denso em 0, a × 0, b .
Situações semelhantes aparecem em movimentos de pêndulos giratórios, nas figuras de Lissajous.
Para simplificar a terminologia, denominaremos curva γ de Rn toda
e qualquer função contı́nua γ: I → Rn , onde I é uma intervalo de R.
Curvas retificáveis
Seja γ uma curva de Rn parametrizada por γ: I → Rn , onde I é um
intervalo de R. É geometricamente intuitivo considerar que se γ não
for muito complicada, podemos calcular um valor aproximado para
seu comprimento pela expressão
m
X
i=1
kγ(ti ) − γ(ti−1 )k,
(6.2)
onde P = {t0 < t1 < · · · < tm−1 < tm } é uma partição de I, isto
é, um conjunto finito de pontos de I. Além disso, segue da desigualdade triangular que as somas em (6.2) aumentam se a partição P for
refinada. Portanto, é razoável que o comprimento de γ seja dado pelo
supremo das somas em (6.2) para todas as possı́veis partições de I.
Para formalizar estas ideias, denotemos por P a coleção de todas
as partições do intervalo I.
Definição 6.2: Uma curva γ: I → Rn é retificável se existe M > 0
tal que
m
X
kγ(ti ) − γ(ti−1 )k ≤ M,
i=1
para qualquer partição P de I. Além disso, se γ é retificável, então
med(γ) = sup
P ∈P
m
nX
i=1
kγ(ti ) − γ(ti−1 )k ; ti ∈ P
é denominado o comprimento de γ.
o
92
Cálculo Avançado I
Curvas diferenciáveis
Seja γ uma curva em Rn . Se γ: I → Rn é uma função diferenciável
em todos os pontos interiores de I, dizemos que γ é uma curva diferenciável.
Em particular, segue da definição que
γ(t0 + ∆t) = γ(t0 ) + γ ′ (t0 )∆t + ε(∆t),
onde γ ′ (t0 ): R → Rn é uma função linear e ε: R → Rn é função o(|∆t|),
isto é,
kε(∆t)k
lim
= 0.
∆t→0
|∆t|
Vale observar que γ ′ (t0 ): R → Rn sendo uma função linear é necessariamente da forma γ(t0 )(s) = su, com u ∈ Rn . Além disso, segue
do Teorema 5.8 que a curva γ = (γ1 , . . . , γn ) é uma curva diferenciável
se e somente se cada coordenada γi é função diferenciável no interior
de I.
Se γ: [a, b] → Rn é curva diferenciável em (a, b) e se existem os
limites lateriais
lim+
t→a
γ(t) − γ(a)
t−a
e
lim−
t→b
γ(t) − γ(b)
,
t−b
dizemos que γ é diferenciável em [a, b]. Se γ ′ : I → Rn é função
contı́nua, dizemos que γ é curva de classe C 1 em I.
Proposição 6.3: Se γ: [a, b] → Rn é curva de classe C 1 em [a, b],
então γ é retificável e
Z b
med(γ) =
kγ ′ (t)k dt.
(6.3)
a
Prova: Seja ε > 0 e P = {t0 = a < t1 < . . . < tm = b} uma partição
de [a, b]. Como γ é de classe C 1 , temos, para i = 1, . . . , m (veja
Exercı́cio 5.9),
γ(ti ) − γ(ti−1 ) = ∆ti
Z
0
1
γ ′ sti−1 + (1 − s)ti ds,
Curvas em R
n
93
onde ∆ti = ti − ti−1 . Logo,
kγ(ti ) − γ(ti−1 ) − γ ′ (ti−1 )∆ti k ≤
Z 1
∆ti
kγ ′ sti−1 + (1 − s)ti − γ ′ (ti−1 )k ds.
0
Como t 7→ kγ ′ (t)k é uma função uniformemente contı́nua em [a, b],
existe δ0 > 0 tal que se ∆ti < δ0 , então
kγ ′ sti−1 + (1 − s)ti − γ ′ (ti−1 )k ≤
ε
,
2(b − a)
∀s ∈ [0, 1].
Portanto, para i = 1, . . . , m, se ∆ti < δ0 , temos kγ(ti) − γ(ti−1 ) −
γ ′ (ti−1 )∆ti k ≤ ε∆ti /2(b − a) e segue da desigualdade triangular,
kγ ′ (ti−1 )k∆ti −
ε∆ti
≤ kγ(ti ) − γ(ti−1 )k
2(b − a)
ε∆ti
≤ kγ (ti−1 )k∆ti +
.
2(b − a)
(6.4)
′
Tomando-se a soma em i nas desigualdades (6.4), obtemos
m
X
i=1
m
kγ ′ (ti−1 )k∆ti −
ε X
kγ(ti) − γ(ti−1 )k
≤
2
i=1
≤
m
X
ε
kγ ′ (ti−1 )k∆ti + .
2
i=1
′
Por outro lado,
Pmsegue′ da continuidade de t 7→ kγ (t)k que as somas
de Riemann
i=1 kγ (ti−1 )k∆ti convergem para a integral, isto é,
existe δ1 > 0 tal que se ∆ti < δ1 então
Z
b
′
a
kγ (t)k dt −
m
X
i=1
kγ ′ (ti−1 )k∆ti <
ε
.
2
Portanto, se a partição P é tal que ∆ti < min{δ0 , δ1 }, então
Z
a
b
′
kγ (t)k dt − ε ≤
m
X
i=1
kγ(ti ) − γ(ti−1 )k ≤
Z
a
b
kγ ′ (t)k dt + ε
94
Cálculo Avançado I
e concluı́mos que γ é retificável com
med(γ) =
Z
b
a
kγ ′ (t)k dt.
Observação: É claro que se γ : I → Rn é de classe C 1 e I é um
intervalo não limitado, então γ é retificável se, e somente se,
sup
nZ
b
a
kγ(t)k dt ; [a, b] ⊂ I
o
< +∞.
Integral de linha: o caso escalar
A integral em (6.3) é um caso particular do que usualmente se
denomina integral de linha escalar. Mais geralmente, se Ω ⊂ Rn é
um conjunto aberto, f : Ω → R é uma função contı́nua e γ: [a, b] → Ω
é uma curva de calsse C 1 , então a aplicação t 7→ f (γ(t))kγ ′(t)k é
contı́nua em [a, b] e portanto integrável em [a, b].
Definição 6.4: Denominamos integral de linha da função f sobre γ
a integral
Z b
f (γ(t))kγ ′(t)k dt.
a
Uma propriedade importante desta integral é o fato que, sob certas
condições, ela independe da parametrização da curva. De fato, seja
γ1 : [a, b] → Rn uma curva de classe C 1 e ϕ: [α, β] → [a, b] função de
classe C 1 tal que ϕ′ (τ ) > 0 para todo τ ∈ ]α, β[. Definindo γ2 (τ ) =
γ1 (ϕ(τ )), uma simples mudança de variável nos dá
Z
β
α
f (γ2 (τ ))kγ2′ (τ )k
dτ =
Z
b
a
f (γ1 (t))kγ1′ (t)k dt.
Nos textos de Cálculo Diferencial é usual a notação ds = kγ ′ (t)kdt,
onde ds é denominado elemento de comprimento de arco. Assim, e
tendo em vista a propriedade de invariância em relação ao parâmetro,
Curvas em R
n
95
se uma dada curva Γ é parametrizada por γ: [a, b] → Rn , é usual
escrever
Z b
Z
f ds =
f (γ(t))kγ ′(t)k dt.
(6.5)
Γ
a
A variável s introduzida acima é mais do que uma mera notação; pode
ser considerada como um parâmetro “intrı́nsico” da curva. Para mais
detalhes, veja o Exercı́cio 6.9.
Aplicação: a transformada raio-x
Como exemplo de integral de linha escalar, vamos considerar a
Transformada Raio-X , que é amplamente empregada na Tomografia
Computadorizada. Os modelos matemáticos sobre os quais a tomografia se baseia incluem, como uma de suas etapas básicas, a reconstrução de uma função f a partir do conhecimento de integrais de
linha de f sobre retas. Muito esquematicamente, as retas descrevem
as trajetórias de raios X que atravessam um corpo fı́sico que ocupa
uma região Ω do espaço e as integrais de linha sobre essas retas medem a absorção dos raios pelo material no interior do corpo.
Do ponto de vista matemático, o problema da tomografia pode ser
formulado como segue:
Problema: Seja L o conjunto de todas as retas que
R interceptam Ω. Para cada l ∈ L, denotamos por R(l) = l f ds a
integral de linha de f sobre a reta l. É possı́vel determinar f
conhecendo-se R(l) para todas as retas l ∈ L?
Para formulá-lo de modo mais preciso, seja f : Ω → R uma função
contı́nua, onde Ω ⊂ Rn é um aberto com fronteira regular. Vamos
denotar por fe a extensão de f nula no complementar de Ω, isto é,
fe: Rn → R a função definida por
e
f (x) = f (x) se x ∈ Ω,
0
senão.
A Transformada Raio-X de f na direção u é definida como a função
Ru [f ]: Rn → R tal que
Z ∞
Ru [f ](x) =
fe(x + τ u) dτ,
(6.6)
−∞
96
Cálculo Avançado I
onde u ∈ S é vetor unitário de Rn . Então o Problema acima pode ser
reescrito como
Problema: Se g: Ω × S → R, podemos determinar f tal
que Ru [f ](x) = g(x, u) para todo x ∈ Ω e para todo vetor
unitário u?
(6.7)
Decorre imediatamente da definição a seguinte propriedade: para
todo x ∈ Rn e para todo u ∈ S, tem-se
Ru [f ](x + λu) = Ru [f ](x),
∀λ ∈ R.
(6.8)
• Funções radiais
Consideraremos a seguir um caso particular onde o problema pode
ser resolvido facilmente. Por simplicidade, vamos nos restringir a
duas dimensões.
Observação: A Transformada Raio-X no caso n = 2 é equivalente à Transformada de Radon, estudada pelo matemático austrı́aco
J. Radon.
Para θ ∈ R, consideramos o vetor unitário na direção θ, isto é,
u(θ) = (cos θ, sen θ). Para cada x = (x1 , x2 ) ∈ R2 , seja γ(t) a
parametrização da reta que passa por x na direção u(θ), isto é,
γ(t) = x + tu(θ) = (x1 + t cos θ, x2 + t sen θ),
t ∈ R.
Seja Ω o disco de centro em (0, 0) e raio R,
Ω = (x1 , x2 ) ; x21 + x22 < R2 .
Neste caso, a Transformada Raio-X de f : Ω → R no ponto x e na
direção θ se expressa por
Z ∞
Rθ [f ](x) =
fe(x1 + t cos θ, x2 + t sen θ) dt.
−∞
Se f é uma função
p radial, existe f0 : [0, R] → R tal que f (x1 , x2 ) =
f0 (r), onde r = x21 + x22 . Pela propriedade (6.8), podemos escolher
Curvas em R
n
97
λ tal que x + λu seja o ponto sobre a reta ortogonal a γ que passa
pela origem, isto é
x + λu = (−τ sen θ, τ cos θ),
Assim, temos
Z
Rθ [f ](x) =
∞
−∞
=2
Z
0
|τ | ≤ R.
fe(−τ sen θ + t cos θ, τ cos θ + t sen θ) dt
∞
Z
p
2
2
e
f0
τ + t dt = 2
0
√
R2 −τ 2
f0
p
τ 2 + t2 dt.
Podemos concluir da expressão acima que se f é uma função radial,
então Rθ [f ] não depende de θ.
• O problema inverso.
A solução do Problema em (6.7) é relativamente simples no caso
radial. De fato, seja f uma função radial e g(τ ) = Rθ [f ](τ ) sua
Transformada Raio-X. Então, pelo que vimos anteriormente,
Z ∞
p
g(τ ) = 2
fe0 ( τ 2 + t2 ) dt.
0
√
Considerando a mudança de variável ξ = τ 2 + t2 , obtemos
Z ∞
ξ
p
g(τ ) = 2
fe0 (ξ) dξ.
2 − τ2
ξ
τ
(6.9)
A equação acima é uma Equação de Abel. Podemos invertê-la,
utilizando o√seguinte argumento: multipliquemos ambos os lados de
(6.9) por τ / τ 2 − r 2 e integremos no intervalo [r, +∞]. Assim, obtemos
#
Z ∞
Z ∞ "Z ∞
τ
ξ
τ
√
p
√
fe0 (ξ) dξ dτ
g(τ ) dτ = 2
2 − r2
2 − r2
2 − τ2
τ
τ
ξ
r
r
τ
#
Z ∞ "Z ξ
1
τ
p
√
=2
dτ ξ fe0 (ξ) dξ
2
2
2
2
τ
−
r
ξ −τ
r
r
98
Cálculo Avançado I
Para simplificar a integral entre colchetes √
na última igualdade acima,
consideremos a mudança de variável ζ = τ 2 − r 2 . Então
I(r, ξ) =
Logo,
Z
∞
r
Z
ξ
1
p
√
τ
dτ
τ 2 − r2
ξ2 − τ 2
√
Z ξ2 −r2
dζ
p
=
ξ 2 − r2 − ζ 2
0
Z a
dζ
π
p
=
= .
2
a2 − ζ 2
0
r
τ
√
g(τ ) dτ = π
2
τ − r2
Z
∞
r
ξ fe0 (ξ) dξ.
Derivando os dois lados da identidade acima em relação a r, obtemos
d
dr
Z
∞
r
ou, equivalentemente,
τ
√
g(τ ) dτ = −rπ fe0 (r),
τ 2 − r2
1 d
fe0 (r) = −
πr dr
Z
r
∞
τ
√
g(τ ) dτ .
τ 2 − r2
√
Observe que a função τ 7→ τ / √
τ 2 − r 2 é integrável em [r, r+ε] para
todo ε > 0. Entretanto, como τ / τ 2 − r 2 → 1 quando τ → +∞, devemos supor que |g(τ )| decaia rapidamente a zero para que a integral
imprópria acima seja convergente. Esta condição é automaticamente
satisfeita se o suporte de fe0 estiver contido no cı́rculo de raio R. De
fato, neste caso, como vimos anteriormente, g(τ ) = 0 para τ > R e,
consequentemente,
1 d
f0 (r) = −
rπ dr
"Z
r
R
#
τ
√
g(τ ) dτ ,
τ 2 − r2
∀r ∈ (0, R).
(6.10)
Curvas em R
n
99
O teorema fundamental do cálculo
Além da integral de linha escalar definida em (6.5), há uma outra
forma de definir integral de linha, cuja interpretação fı́sica usual é
a definição de trabalho realizado por um campo de forças. Mais
precisamente, seja g: Ω → Rn uma função contı́nua, onde Ω ⊂ Rn é
um conjunto aberto e γ: [a, b] → Rn uma
de classe C 1 contida
curva
′
em Ω. Então a função ϕ(t) = g γ(t) : γ (t) é contı́nua e portanto
integrável em [a, b].
Definição 6.5: Denominamos integral de linha do campo g sobre γ
a integral
Z b
Z
g · dγ =
(6.11)
g γ(t) : γ ′ (t) dt.
γ
a
Além de sua importância nas aplicações, a integral de linha definida
em (6.11) tem uma estreita relação com o Teorema Fundamental do
Cálculo, como veremos a seguir.
Lembremos o Teorema Fundamental do Cálculo para funções reais
de uma variável.
Se g: [a, b] → R é função contı́nua e x0 ∈ ]a, b[, então a função
f : [a, b] → R definida por
Z x
g(s) ds
f (x) = y0 +
x0
é diferenciável em ]a, b[ e é a única função que satisfaz
(
f ′ (x) = g(x), ∀x ∈ ]a, b[
f (x0 ) = y0 .
A questão natural sobre a extensão do Teorema Fundamental do
Cálculo para as funções de várias variáveis pode ser formulada da
seguinte forma:
Problema: Seja Ω aberto e conexo de Rn , x0 ∈ Ω e y0 ∈ R.
Dada g: Ω → Rn contı́nua, deseja-se saber se existe f : Ω → R
função diferenciável tal que
(
f ′ (x) = g(x), ∀x ∈ Ω
f (x0 ) = y0 .
100
Cálculo Avançado I
Uma função g para a qual o problema acima tem resposta afirmativa é denominado Campo Gradiente em Ω e a função f é denominada
potencial associado ao campo g.
Uma condição necessária para que g seja um campo gradiente pode
ser obtida pela Regra da Cadeia. De fato, sejam x e y dois pontos de
Ω e γ1 , γ2 : [0, 1] → Ω duas curvas de classe C 1 ligando x a y. Então,
segue da Regra da Cadeia,
Z 1
f (y) − f (x) =
f ′ γi (t) : γi′ (t) dt, i = 1, 2,
0
isto é, as integrais de linha sobre γ1 e γ2 são iguais.
A observação acima suscita de imediato a questão sobre a possibilidade de se ligar dois pontos quaisquer de um aberto conexo por uma
curva de classe C 1 totalmente contida em Ω. De fato,
Lema 6.6: Sejam Ω aberto e conexo de Rn , x e y dois pontos de Ω.
Então existe uma curva γ: [a, b] → Ω de classe C 1 em [a, b] ligando x
a y.
Prova: Veja exercı́cios.
As observações acima e considerações da fı́sica (veja próxima seção)
nos levam à
Definicão 6.7: Seja Ω aberto e conexo de Rn . Dizemos que g: Ω →
Rn é Campo Conservativo em Ω se para todo x, y ∈ Ω e duas curvas
diferenciáveis quaisquer γ1 , γ2 ligando x a y, tem-se
Z
Z
g · dγ =
g · dγ.
γ1
γ2
Lema 6.8: Seja Ω aberto e conexo de Rn . Se f : Ω → R é função de
classe C 1 em Ω, então f ′ é campo conservativo em Ω.
Teorema 6.9: Seja Ω aberto e conexo de Rn . Se g: Ω → Rn é campo
conservativo contı́nuo em Ω, então dado x0 ∈ Ω e y0 ∈ R, existe uma
única f : Ω → R de classe C 1 tal que
(
f ′ (x) = g(x), ∀x ∈ Ω
f (x0 ) = y0 .
Curvas em R
n
101
Prova: Seja f : Ω → R a função definida por
f (x) = y0 +
Z
1
0
g γ(t) : γ ′ (t) dt,
(6.12)
onde γ: [0, 1] → Rn é uma curva de classe C 1 contida em Ω ligando x0
a x. Como g é campo conservativo, f está bem definida e f (x0 ) = y0 .
Provemos então que f é diferenciável e que f ′ ≡ g em Ω.
Seja x ∈ Ω e r > 0 tal que Br (x) ⊂ Ω. Para h ∈ Rn tal que
khk < r, seja γ1 : [0, 2] → Rn uma curva de classe C 1 ligando x0 a
x + h totalmente contida em Ω, satisfazendo
γ1 (t) = x + (t − 1)h, ∀t ∈ [1, 2].
Então podemos escrever
f (x + h) = y0 +
Z
0
2
g γ1 (t)) : γ1′ (t) dt.
(6.13)
Consideremos γ2 , γ3 : [0, 1] → Rn definidas por
γ2 (t) = γ1 (t),
γ3 (s) = γ1 (s + 1) = x + sh.
Então γ2 e γ3 são curvas de classe C 1 ligando respectivamente x0 a
x e x a x + h. Da definição (6.12), a equação (6.13) toma a forma
Z
f (x+h) = f (x)+
1
g γ3 (s)
0
: γ3′ (s)
Z
ds = f (x)+
1
0
g γ3 (s) : h ds.
(6.14)
Podemos ainda reescrever (6.14) na forma
f (x + h) = f (x) + g(x) : h + ǫ(h),
onde
ǫ(h) =
Z
0
1
g γ3 (s) − g(x) : h ds.
(6.15)
102
Cálculo Avançado I
Como g é contı́nua em Ω, dado ε > 0, existe δ > 0 tal que se ky−xk <
δ, então kg(y) − g(x)k < ε. Portanto, se khk < δ, temos de (6.15)
|ǫ(h)|
≤ kg(γ3 (s)) − g(x)k < ε.
khk
Como a unicidade de f é consequência imediata do Teorema do Valor
Médio, concluı́mos a prova.
Observação: O Teorema 6.9 dá condições suficientes para que g seja
um campo gradiente num aberto conexo de Rn , mas não oferece um
critério prático para isso. Podemos obter um critério simples e fácil
de provar supondo Ω convexo.
Teorema 6.10: Seja Ω aberto e convexo
de Rn . Se g: Ω → Rn é
função de classe C 1 em Ω tal que g ′ (x) é matriz simétrica para
todo x ∈ Ω, então g é campo gradiente em Ω.
Prova: Sejam x, y ∈ Ω e γ0 , γ1 : [0, 1] → Rn duas curvas diferenciáveis
distintas que ligam x a y em Ω. Para cada s ∈ [0, 1], consideremos
γs : [0, 1] → Rn definida por γs (t) = γ0 (t) + s γ1 (t) − γ0 (t) . Então
para cada s ∈ [0, 1], γs é curva diferenciável ligando x a y e γs′ (t) =
γ0′ (t) + s γ1′ (t) − γ0′ (t) .
Seja Φ(s) a função definida por
Z 1
g γs (t) : γs′ (t) dt.
Φ(s) =
0
Como g é de classe C 1 , podemos calcular a derivada de Φ em relação
ao parâmetro s derivando sob o sinal de integral (veja Exercı́cio 5.13).
Assim,
Z 1
∂
′
Φ (s) =
g γs (t) : γs′ (t) dt
0 ∂s
Z 1
Z 1
d
d ′
′
′
g γs (t)
γs (t) : γs (t) +
g γs (t) :
γ (t) .
=
ds
ds s
0
0
Como g ′ (x) é simétrica, temos
Z 1
Z 1
d
d
′
′
g γs (t)
γs (t) : γs (t) dt =
g ′ γs (t) γs′ (t) :
γs (t) dt.
ds
ds
0
0
Curvas em R
n
103
Por outro lado, como
d
g γs (t) : γ1 (t) − γ0 (t) = g ′ γs (t) γs′ (t) : γ1 (t) − γ0 (t)
dt
+ g γs (t) : γ1′ (t) − γ0′ (t) ,
podemos escrever
′
Φ (s) =
Z
1
0
d
g γs (t) : γ1 (t) − γ0 (t) dt = 0.
dt
Portanto Φ(s) é função constante e concluı́mos
Z
γ1
g · dγ = Φ(1) = Φ(0) =
Z
γ0
g · dγ
e temos a conclusão pelo Teorema 6.9.
Observação: A hipótese sobre a convexidade de Ω no Teorema 6.10
não é necessária, mas o resultado não pode ser estendido a todos os
abertos conexos, como se pode ver pelo seguinte exemplo.
Exemplo: Seja Ω = (x1 , x2 ) ∈ R2 ; 1/4 < x21 + x22 < 4 . Seja
g: Ω → R2 a função definida por
g(x1 , x2 ) =
−x2
x1
, 2
2
2
x1 + x2 x1 + x22
.
É fácil ver que g é de classe C 1 em Ω e que g ′ (x1 , x2 ) é matriz
simétrica para todo (x1 , x2 ) ∈ Ω. No entanto, g não é campo conservativo em Ω. De fato, considerando γ1 , γ2 : [0, 1] → Ω as curvas
definidas por
γ1 (t) = (cos πt, sen πt)
γ2 (t) = (cos πt, − sen πt),
e
então γ1 e γ2 ligam (1, 0) a (−1, 0) e
π=
Z
γ1
g · dγ 6=
Z
γ2
g · dγ = −π.
104
Cálculo Avançado I
Portanto, não existe f : Ω → R diferenciável tal que f ′ (x) = g(x) para
todo x ∈ Ω.
Por outro lado, g é de classe C 1 no convexo
Ω1 = (x1 , x2 ) ∈ R2 ; x1 > 0
e g ′ (x1 , x2 ) é simétrica para todo (x1 , x2 ) ∈ Ω1 . Pelo Teorema 6.10
existe f : Ω1 → R um potencial de g em Ω1 . De fato, um cálculo
simples mostra que f (x1 , x2 ) = arctan(x2 /x1 ) é potencial de g em
Ω1 .
Analogamente,
f (x1 , x2 ) 2= − arctan(x1 /x2 ) é potencial de g no
convexo Ω2 = (x1 , x2 ) ∈ R ; x2 > 0 .
Observação: O exemplo mostra que numa coroa circular o resultado não vale em geral. Veja que o campo no exemplo anterior não
está definido em (0, 0), de modo que o “buraco” da coroa evita a
singularidade.
Observação: Como dissemos na observação anterior, a hipótese sobre a convexidade de Ω no Teorema 6.10 não é necessária. No caso
n = 2, a prova que apresentamos para o Teorema 6.10 também se
aplica para os conjuntos denominados simplesmente conexos, isto é,
os conjuntos que não possuem “buracos” em seu interior. Mais precisamente,
Definição 6.11: Dizemos que um conjungo Ω ⊂ R2 é simplesmente
conexo se, para toda curva de Jordan Γ contida em Ω, a região de R2
interior a Γ é um subconjunto de Ω.
Observação: Observe que a coroa circular não é um conjunto simplesmente conexo de R2 . Podemos estender a definição de conjunto
simplesmente conexo para dimensão n ≥ 3. No caso n = 3, por exemplo, um conjunto é simplesmente conexo se não existem “túneis que
o atravessem”. Assim, uma esfera oca de R3 é simplesmente conexa,
mas um toro não é.
Observação: Não é muito difı́cil de imaginar que a demostração
do Teorema 6.10 pode ser adaptada para conjuntos simplesmente
conexos de R3 se substituirmos os segmentos de reta γs (t) por curvas
ligando os pontos γ0 (t) e γ1 (t) que evitem os eventuais “buracos” de
Ω, mas isso só é possı́vel se este for simplesmente conexo.
Curvas em R
n
105
Aplicação: conservação da energia
Consideremos uma partı́cula de massa m que se desloca no espaço
R sob a ação de um campo de forças g: R3 → R3 . Se γ(t) é sua
posição no instante t, temos pela lei de Newton: “a variação da quantidade de movimento em cada instante é igual a resultante das forças
que atuam sobre a partı́cula”, isto é,
3
d
mγ ′ (t)) = g γ(t) .
dt
Se g é um campo gradiente, definimos a Energia da partı́cula no
instante t por
E(t) = Ec (t) + Ep (t) =
m ′
kγ (t)k22 − f γ(t) ,
2
(6.16)
onde f é o potencial associado a g. Ec e Ep são respectivamente as
energias cinética e potencial no instante t.
Como consequência da lei de Newton temos a Conservação da Energia, isto é, E(t) = E(0) para todo t. De fato,
d
E(t) = m γ ′ (t) : γ ′′ (t) − ∇f γ(t) : γ ′ (t)
dt
= mγ ′′ (t) − g γ(t) : γ ′ (t) = 0.
Exercı́cios
Exercı́cio 6.1. Seja γ: [0, +∞[ → R3 definida por
γ(t) = (e−t cos t, e−t sen t, e−t ).
Mostre que γ é retificável e calcule seu comprimento.
Exercı́cio 6.2. Dê exemplo de uma curva γ: [0, 1] → R2 , ligando dois
pontos de R2 que não seja retificável.
Exercı́cio 6.3. Uma partı́cula se move no plano (resp. no espaço) e
sua trajetória é descrita por
γ(t) = (1 − t)2 x1 + 2t(1 − t)x2 + t2 x3 ,
t ∈ [0, 1],
(6.17)
106
Cálculo Avançado I
onde x1 , x2 e x3 são pontos dados de R2 (resp. R3 ).
a) Descreva o movimento da partı́cula, fazendo um esboço da trajetória.
b) Calcule γ ′ (0) e γ ′ (1).
c) Se x1 , x2 e x3 não são colineares, mostre que γ(t) está contido
no triângulo com vértices em x1 , x2 e x3 .
Exercı́cio 6.4. O mesmo do exercı́cio anterior para a partı́cula cuja
trajetória é descrita por
γ(t) = (1 − t)3 x1 + 3t(1 − t)2 x2 + 3t2 (1 − t)x3 + t3 x4 .
(6.18)
Observação: As curvas definidas por (6.17) e (6.18) têm como coordenadas polinômios na variável t denominados Polinômios de Bernshteı̆n, porque foram introduzidos por Sergeı̆ Bernshteı̆n em 1912 num
trabalho pioneiro em Teoria da Aproximação. As curvas mencionadas
são denominadas Curvas de Bézier, por ter sido Pierre Bézier quem
as introduziu nos anos sessenta como importante ferramenta para a
Computação Gráfica. Enfatizamos aqui a importância destas curvas
na construção e desenho dos caracteres e sı́mbolos (fontes do TEX)
utilizados neste texto.
Exercı́cio 6.5. Seja Ω aberto e conexo de Rn . (a) Mostre que se
x e y são dois pontos quaisquer de Ω, existe uma curva ligando x
a y totalmente contida em Ω. Sugestão: Fixe x ∈ Ω e considere A
o conjunto dos y de Ω que podem ser ligados a x por uma curva
totalmente contida em Ω. Mostre que A e Ω \ A são abertos.
(b) Mostre que existe uma curva poligonal (isto é, formada por segmentos de reta) ligando x a y totalmente contida em Ω.
Exercı́cio 6.6. Seja γ uma curva poligonal ligando os pontos x1 ,
x2 e x3 de Rn . ParaSε > 0 seja Oε a vizinhança de diâmetro ε de
γ definida por Oε = x∈γ Bε (x). Construa uma curva diferenciável
ligando x1 a x3 inteiramente contida em Oε .
Sugestão: Use (6.17)
Exercı́cio 6.7. Prove o Lema 6.6. Sugestão: Use os dois exercı́cios
anteriores.
Curvas em R
n
107
Exercı́cio 6.8. Sejam γ: [a, b] → Rn uma curva fechada (γ(a) = γ(b))
diferenciável e K um convexo fechado do Rn tal que K ⊃ {γ ′ (t) ; t ∈
[a, b]}. Mostre que 0 ∈ K.
Exercı́cio 6.9. Seja γ uma curva retificável de comprimento L parametrizada por γ: [a, b] → Rn . Seja s: [a, b] → [0, L] a função definida
por
s(t) = comprimento de γ [a, t] se t > a
0
se t = a
a) Mostre que s é crescente.
b) Mostre que se γ é função Lipschitz contı́nua, então s(t) também
é Lipschitz contı́nua.
c) Suponha s(t) estritamente crescente e defina
γ̃: [0, L] → Rn ,
γ̃(s) = γ(t(s)),
onde t(s) denota a inversa de s(t). Mostre que γ̃ e γ descrevem
a mesma curva, isto é, γ [a, b] = γ̃ [0, L] .
6 0
d) Se γ: [a, b] → Rn é curva de classe C 1 em [a, b] tal que kγ ′ (t)k =
1
para todo t ∈]a, b[, mostre que γ̃ é curva de classe C em [0, L]
tal que kγ̃ ′ (s)k = 1 para todo s.
(Moral da história: se uma curva pode ser percorrida por uma
partı́cula com velocidade escalar kγ ′ (t)k =
6 0, então pode ser
percorrida com velocidade escalar constante).
Exercı́cio 6.10. Seja Ω ⊂ R2 o disco unitário de centro na origem.
Determine f : Ω → R tal que
q
Rθ [f ](x) = 2 1 − kxk22 , ∀x ∈ Ω.
Exercı́cio 6.11. Seja Ω ⊂ Rn aberto, limitado e conexo. Demonstre
a afirmativa abaixo se verdadeira ou dê um contra-exemplo se falsa.
Existe R > 0 tal que ∀x, y ∈ Ω existe uma curva γ retificável
ligando x a y tal que med(γ) ≤ R.
Exercı́cio 6.12. O ângulo formado por duas curvas diferenciáveis
que se cruzam num ponto P é, por definição, o ângulo formado pelos
108
Cálculo Avançado I
vetores tangentes às curvas em P . Mais precisamente, se γ1 , γ2 : I →
Rn são duas curvas diferenciáveis tais que P = γ1 (t0 ) = γ2 (t0 ) para
algum t0 ∈ I, então definimos o ângulo θ entre γ1 e γ2 em P por
cos θ =
γ1′ (t0 ) : γ2′ (t0 )
kγ1′ (t0 )kkγ2′ (t0 )k.
Uma função f : R2 → R2 é denominada transformação conforme se
o ângulo entre duas quaisquer curvas que se cruzam fica preservado
por f .
a) Seja f (x) = Ax, ∀x ∈ R2 , onde A é matriz 2 × 2. Mostre que f
é transformação conforme se e somente se A é da forma:
a −c
c
a
ou
a
c
c
−a
b) Seja f : R2 → R2 , f = (ϕ, ψ) função diferenciável. Determine as
condições necessárias e suficientes sobre f ′ para que f seja uma
transformação conforme.
c) Calcule Jf (x).
Exercı́cio 6.13. Mostre que a função f definida no Exercı́cio 5.10 é
uma transformação conforme.
Exercı́cio 6.14. Determine uma curva diferenciável γ: [−1, 1] → R2
tal que
γ [−1, 1] = {(x, y) ∈ R2 ; y = |x|, −1 ≤ x ≤ 1}.
Exercı́cio 6.15. Seja g: Ω → R2 definido por
g(x, y) =
x
−y
, 2
2
2
x + y x + y2
,
onde Ω = (x, y) ∈ R2 ; y > −x . Mostre que g é campo gradiente
em Ω e determine o potencial f : Ω → R tal que ∇f = g.
7
Derivadas de Ordem Superior
Vamos tratar neste capı́tulo do estudo da derivada de segunda ordem
para funções reais definidas em um aberto de Rn .
Seja f : Ω ⊂ Rn → R uma função diferenciável. Então, está bem
definida a aplicação
f ′ : Ω →L Rn ; R ,
x 7→f ′ (x).
Fazendo-se a identificação L Rn ; R ∼
= Rn , podemos perguntar se a
′
n
aplicação f : Ω → R é diferenciável em algum ponto x0 ∈ Ω. No caso
afirmativo diremos que f é duas vezes diferenciável em x0 . Decorre
da Definição 5.3 que se f é duas vezes diferenciável em x0 , então
existem funções L, ε: Rn → Rn tais que
f ′ (x0 + h) = f ′ (x0 ) + Lh + ε(h),
onde L é linear e ε é o(khk). L, a diferencial (ou derivada de Fréchet)
de f ′ em x0 , é denominada derivada segunda de f em x0 e denotamos
L = f ′′ (x0 ).
Lema 7.1: Seja f : Ω ⊂ Rn → R uma função de classe C 1 em Ω, duas
vezes diferenciável em x0 . Então existe ǫ: Rn → R satisfazendo
|ǫ(h)|
=0
h→0 khk2
lim
(7.1)
110
Cálculo Avançado I
tal que
f (x0 + h) = f (x0 ) + f ′ (x0 ) : h +
1 ′′
f (x0 )h : h + ǫ(h).
2
Prova: Seja h ∈ Rn e t ∈ R suficientemente pequenos. Por hipótese
temos
(7.2)
f ′ (x0 + th) = f ′ (x0 ) + f ′′ (x0 )(th) + E(th),
onde a função E: Rn → Rn é o(khk). Da Proposição 5.5 temos a
continuidade de h 7→ E(h). Logo, podemos multiplicar escalarmente
por h ambos os lados de (7.2) e integrar em t de 0 a 1, para obter
Z
0
1
1
f (x0 +th) : h dt = f (x0 ) : h + f ′′ (x0 )h : h +
2
′
Como
′
Z
0
1
Z
1
E(th) : h dt.
0
f ′ (x0 + th) : h dt = f (x0 + h) − f (x0 ),
temos a identidade
1
f (x0 +h) −f (x0 ) = f (x0 ) : h + f ′′ (x0 )h : h +
2
′
Z
1
E(th) : h dt.
0
Para concluir a demonstração, basta mostrar que a função
ǫ(h) =
Z
1
E(th) : h dt
0
satisfaz a condição (7.1). De fato, segue da desigualdade de CauchySchwarz,
|ǫ(h)|
≤
khk2
Z
0
1
| E(th) : h |
dt ≤
khk2
Z
0
1
kE(th)k
dt.
khk
Como E é o(khk), dado ε > 0, existe δ > 0 tal que se kξk < δ, então
kE(ξ)k < εkξk. Em particular, se khk < δ, então kE(th)k < εkhk,
para todo t ∈ [0, 1] e concluı́mos a prova.
Derivadas de Ordem Superior
111
Sabemos do Cálculo Diferencial que se f : R → R é duas vezes
derivável e convexa, então f ′ é função monótona crescente e f ′′ é
função positiva. Estes fatos podem ser generalizados para funções
f : Rn → R se consideradas as extensões apropriadas dos conceitos de
crescente e positiva respectivamente para vetores e matrizes.
Definição 7.2: Uma função g: Ω ⊂ Rn → Rn é dita monótona
positiva em Ω se
g(x) − g(y) : x − y ≥ 0,
∀x, y ∈ Ω.
g é dita monótona negativa se −g é monótona positiva.
Definição 7.3: Uma matriz A n × n é dita positiva definida se
hAx : xi > 0, ∀x 6= 0 em Rn . A é dita semipositiva definida se
hAx : xi ≥ 0, ∀x ∈ Rn . A é dita negativa (resp. seminegativa)
definida se −A é positiva (resp. semipositiva) definida.
Notação: Se A é semipositiva (resp. seminegativa) definida denotamos A ≥ 0 (resp. A ≤ 0). Se A é positiva (resp. negativa) definida,
denotamos A > 0 (resp. A < 0).
Observe que uma função real de variável real é crescente se e somente se é monótona positiva. Observe também que se f (x) = Ax,
então f é monótona positiva se e somente se A é semipositiva definida.
Teorema 7.4: Seja f : Rn → R uma função diferenciável. Então f é
convexa se e somente se f ′ é monótona positiva.
Prova: Provemos inicialmente a implicação “⇒”. Por hipótese temos
f x0 + t(x1 − x0 ) ≤ f (x0 ) + t f (x1 ) − f (x0 ) ,
f x0 + t(x1 − x0 ) = f (x0 ) + t f ′ (x0 ) : x1 − x0 + ǫ t(x1 − x0 ) .
Subtraindo a segunda equação da primeira, obtemos
t f (x1 ) − f (x0 ) ≥ t f ′ (x0 ) : x1 − x0 + ǫ t(x1 − x0 ) .
Denotando por ξ = t(x1 − x0 ), t > 0, temos após divisão por t
f (x1 ) − f (x0 ) ≥ f ′ (x0 ) : x1 − x0 +
ǫ(ξ)
kx1 − x0 k.
kξk
112
Cálculo Avançado I
Fazendo t → 0, concluı́mos
f (x1 ) − f (x0 ) ≥ f ′ (x0 ) : x1 − x0 .
Mutatis mutandis,
f (x0 ) − f (x1 ) ≥ f ′ (x1 ) : x0 − x1
e temos a conclusão.
Provemos a implicação contrária “⇐”. Sabemos da Análise Real
que se ϕ: R → R é derivável e ϕ′ é crescente, então ϕ é convexa.
Sejam x1 , x0 ∈ Rn e consideremos ϕ(t) = f x0 + t(x1 − x0 ) . Como
f é diferenciável, segue
5.9) que ϕ′ (t) =
da Regra da Cadeia (Teorema
′
′
f x0 + t(x1 − x0 ) : x1 − x0 . Provemos que ϕ é crescente.
ϕ′ (t1 )−ϕ′ (t0 ) = f ′ x0 +t1 (x1 −x0 ) −f ′ x0 +t0 (x1 −x0 ) : x1 −x0 .
Como x0 + t1 (x1 − x0 ) − x0 + t0 (x1 − x0 ) = (t1 − t0 )(x1 − x0 ),
podemos escrever
(t1 − t0 ) ϕ′ (t1 ) − ϕ′ (t0 ) = f ′ (xt1 ) − f ′ (xt0 ) : xt1 − xt0 ,
onde estamos denotando xt = x0 + t(x1 − x0 ).
Como por hipótese f ′ é monótona positiva, concluı́mos que ϕ′ é
crescente. Logo ϕ é convexa e ϕ(t) ≤ ϕ(0) + t(ϕ(1) − ϕ(0)) para todo
t ∈ ]0, 1[. Portanto,
f x0 + t(x1 − x0 ) ≤ f (x0 ) + t f (x1 ) − f (x0 )
para todo t ∈ ]0, 1[.
Teorema 7.5: Seja g: Rn → Rn uma função diferenciável. Então g
é monótona positiva se e somente se g ′ é semipositiva definida.
Prova: Provemos inicialmente a implicação “⇒”. Por hipótese temos
g(x1 ) − g(x0 ) : x1 − x0 ≥ 0,
g(x1 ) = g(x0 ) + g ′ (x0 )(x1 − x0 ) + ǫ(x1 − x0 ).
Derivadas de Ordem Superior
113
Fazendo o produto escalar da segunda equação acima por x1 − x0 ,
obtemos da primeira
0 ≤ g(x1 ) − g(x0 ) : x1 − x0
= g ′ (x0 )(x1 − x0 ) : x1 − x0 + ǫ(x1 − x0 ) : x1 − x0 .
(7.3)
Seja u ∈ Rn vetor unitário tal que x1 − x0 = λu, com λ > 0. Então,
segue de (7.3)
0 ≤ λ2 g ′ (x0 )u : u + λ ǫ(λu) : u .
Dividindo por λ2 e usando a desigualdade de Cauchy-Schwarz, temos
g ′ (x0 )u : u ≥ −
kǫ(λu)k
.
kλuk
Fazendo λ → 0 obtemos a conclusão.
Para provar a implicação contrária, consideremos
a função ϕ: R →
R definida por ϕ(t) = g x0 + t(x1 − x0 ) : x1 − x0 . Segue da Regra
da Cadeia que ϕ é derivável e
ϕ′ (t) = g ′ x0 + t(x1 − x0 ) (x1 − x0 ) : x1 − x0 .
Pelo Teorema do Valor Médio aplicado à ϕ, temos que existe t ∈ ]0, 1[
tal que ϕ(1) − ϕ(0) = ϕ′ (t). Assim,
g(x1 ) − g(x0 ) : x1 − x0 = g ′ x0 + t(x1 − x0 ) (x1 − x0 ) : x1 − x0
e temos a conclusão porque g ′ x0 +t(x1 −x0 ) é semipositiva definida.
Observação: As versões gêmeas dos Teoremas 7.4 e 7.5 são evidentes, bastando trocar crescente, positiva, convexa pelos simétricos
decrescente, negativa, côncava.
114
Cálculo Avançado I
A matriz hessiana
Seja f : Ω → R função duas vezes diferenciável e consideremos
f ′′ : Ω → L(Rn , Rn ).
Fixada a base canônica de Rn , podemos fazer a identificação do
espaço das transformações lineares L(Rn , Rn ) com o espaço Mn das
matrizes n × n. A matriz associada a f ′′ (x0 ) é denominada Matriz
Hessiana de f em x0 .
∂ 2f
(x )
∂x21 0
′′
..
f (x0 ) =
∂ 2f.
(x )
∂x1 ∂xn 0
∂ 2f
(x ) . . .
∂x2 ∂x1 0
..
..
.
.
∂ 2f
(x ) . . .
∂x2 ∂xn 0
∂ 2f
(x )
∂xn ∂x1 0
..
.
∂ 2f
(x
)
0
∂x2n
Máximos e mı́nimos
Seja f : A ⊂ Rn → R uma função.
Definição 7.6: Dizemos que x0 ∈ A é ponto de mı́nimo local (resp.
máximo local) para f se existe r > 0 tal que f (x0 ) ≤ f (x) (resp.
f (x0 ) ≥ f (x)), para todo x ∈ A ∩ Br (x0 ).
Teorema 7.7: Seja Ω ⊂ Rn aberto e f : Ω → R uma função diferenciável. Se x0 ∈ Ω é ponto de mı́nimo (resp. máximo) local de f , então
f ′ (x0 ) = 0. Além disso, se f é C 1 em Ω e duas vezes diferenciável
em x0 , então f ′′ (x0 ) é semipositiva (resp. seminegativa) definida.
Prova: Como f é diferenciável, temos
f (x0 + h) = f (x0 ) + f ′ (x0 ) : h + ε(h),
onde ε(h) é função o(khk). Como Ω é aberto e x0 é ponto de mı́nimo
local para f , existe r > 0 tal que se khk < r então
f ′ (x0 ) : h + ε(h) ≥ 0.
(7.4)
Derivadas de Ordem Superior
115
Se 0 < λ < r e u ∈ Rn unitário são tais que h = λu, obtemos de (7.4)
f ′ (x0 ) : u +
ε(λu)
≥ 0.
λ
No limite quando λ tende a zero, obtemos a desigualdade
f ′ (x0 ) : u ≥ 0
para todo u unitário. Como f ′ (x0 ) : u = − f ′ (x0 ) : −u ≥ 0, ∀u,
concluı́mos que f ′ (x0 ) = 0.
Se f é duas vezesdiferenciável em x0 , segue do Lema 7.1 que existe
ǫ(h) função o khk2 tal que
f (x0 + h) = f (x0 ) + f ′ (x0 ) : h +
1 ′′
f (x0 )h : h + ǫ(h).
2
O argumento anterior nos permite concluir que f ′ (x0 ) = 0 e
1 ′′
ǫ(λu)
f (x0 )u : u +
≥0
2
λ2
para todo vetor unitário u e para todo λ ∈ ]0, r[. Obtemos o resultado
no limite quando λ → 0.
Teorema 7.8: Seja Ω ⊂ Rn aberto e f : Ω → R uma função de classe
C 1 em Ω e duas vezes diferenciável em x0 ∈ Ω. Se f ′ (x0 ) = 0 e
f ′′ (x0 ) é matriz positiva definida, então x0 é ponto de mı́nimo local
de f .
Prova: Pelo Lema 7.1, temos
f (x0 + h) = f (x0 ) +
1 ′′
f (x0 )h : h + ǫ(h),
2
(7.5)
para todo h suficientemente pequeno, onde ǫ(h) é função o khk2 .
Seja µ = min{ f ′′ (x0 )u : u ; kuk = 1}. Como f ′′ (x0 ) é positiva
definida, segue que µ > 0 e vale a desigualdade
f ′′ (x0 )h : h ≥ µkhk2 ,
∀h ∈ Rn .
(7.6)
116
Cálculo Avançado I
Substituindo (7.6) em (7.5), obtemos
f (x0 + h) − f (x0 ) ≥
µ
khk2 + ǫ(h).
2
Como ǫ(h) é o khk2 , existe δ > 0 tal que se 0 < khk < δ, então
|ǫ(h)| < (µ/4)khk2 . Portanto,
f (x0 + h) − f (x0 ) ≥
µ
µ
khk2 − khk2 ≥ 0
2
4
para todo h tal que khk < δ e concluı́mos a prova.
Observação: Se f : Ω → R é uma função diferenciável no aberto
Ω ⊂ Rn e f ′ (x0 ) = 0, então dizemos que x0 é ponto crı́tico de f .
O Teorema 7.8 acima nos fornece um critério—critério da derivada
segunda—para busca de pontos de mı́nimo local dentre os pontos
crı́ticos de f .
Esse critério, tal como formulado pelo Teorema 7.8, apresenta uma
dificuldade de ordem prática para dimensões grandes, visto que, excetuando os casos n ≤ 2 (veja Exercı́cios), não é uma tarefa simples
decidir se [f ′′ (x0 )] é positiva definida. Podemos obter novos critérios
caso f verifique certas condições de regularidade, como veremos adiante. A ideia é simples, se lembrarmos certos resultados fundamentais
de Álgebra Linear, a saber:
(a) Se A = aij )ij é matriz n × n, definimos o traço de A como
a soma dos elementos da diagonal principal de A, isto é,
tr(A) = a11 + a22 + · · · + ann ;
(b) O traço de A é um invariante para semelhança de matrizes,
isto é, se A e B são matrizes semelhantes, então tr(A) =
tr(B);
(c) Se A é matriz diagonalizável, então tr(A) = λ1 + · · · + λn ,
onde λi , i = 1, . . . , n são os autovalores de A;
(d) Uma matriz diagonizável é semipositiva definida (resp. positiva definida) se e somente se todos os seus autovalores são
positivos (resp. estritamente positivos).
Derivadas de Ordem Superior
117
(e) Teorema Espectral: Toda matriz simétrica é diagonalizável.
Lema 7.9: Seja f uma função duas vezes diferenciável que satisfaz
as seguintes propriedades: para todo x ∈ Br (x0 ), a matriz [f ′′ (x)] é
diagonalizável e tr [f ′′ (x)] > 0 . Então f atinge o seu máximo na
fronteira da bola Br (x0 ), isto é
max f (x) ; kx − x0 k ≤ r = max f (x) ; kx − x0 k = r .
Prova: Suponhamos que max f (x) ; kx − x0 k ≤ r = f (x), com
kx − x0 k < r. Então, decorre do Teorema 7.7 que f ′ (x) = 0 e
[f ′′ (x)] é seminegativa definida. Logo, todos
os autovalores de [f ′′ (x)]
são negativos, o que implica tr [f ′′ (x)] ≤ 0, em contradição com a
hipótese.
Lema 7.10: Seja f uma função duas vezes diferenciável que satisfaz
as seguintes propriedades: para todo x ∈ Br (x0 ) a matriz [f ′′ (x)] é
diagonalizável e tr [f ′′ (x)] ≥ 0. Então f atinge o seu máximo na
fronteira da bola Br (x0 ), isto é
max f (x) ; kx − x0 k ≤ r = max f (x) ; kx − x0 k = r .
Prova: Podemos supor sem perder a generalidade que x0 = 0. Seja
ε > 0 e considere a função g definida por
ε
g(x) = f (x) + kxk22 .
2
Então g é duas vezes diferenciável e g ′′ (x) = f ′′ (x) + εI, para todo
x, onde I denota a identidade em Rn . Portanto,
tr [g ′′ (x)] = tr([f ′′ (x)] + nε > 0, ∀x ∈ Br (0).
Segue do Lema 7.9 que g atinge seu máximo na fronteira da bola.
Para concluir o resultado basta observar que
ε
max f (x) ≤ max g(x) = max g(x) = max f (x) + r 2 .
2
kxk≤r
kxk≤r
kxk=r
kxk=r
Assim, para todo ε > 0, temos
ε
max f (x) ≤ max f (x) + r 2 .
2
kxk≤r
kxk=r
118
Cálculo Avançado I
Fazendo ε tender a zero obtemos
max f (x) ≤ max f (x)
kxk≤r
kxk=r
e a conclusão da prova, pois a desigualdade contrária é imediata.
Notação: O traço da matriz Hessiana de uma função f : Ω ⊂ Rn → R
é denominado Laplaciano de f e denotamos
∂2f
∂ 2f
tr [f ′′ (x0 )] = ∆f (x0 ) =
(x
)
+
·
·
·
+
(x0 ).
0
∂x21
∂x2n
Os Lemas 7.9 e 7.10 são conhecidos como Princı́pio do Máximo e são
fundamentais no estudo das Equações a Derivadas Parciais.
O Lema 7.10 pode ser formulado da seguinte forma:
Corolário 7.11: Seja Ω ⊂ Rn aberto e f : Ω → R uma função duas
vezes diferenciável. Suponha x0 ∈ Ω tal que f ′ (x0 ) = 0 e ∆f (x) ≥ 0
para todo x ∈ Br (x0 ). Se [f ′′ (x)] é matriz diagonalizável para todo
x ∈ Br (x0 ), então x0 não é ponto de máximo local de f .
Observe que ∆f (x) ≥ 0 para todo x ∈ Br (x0 ) não implica que
f ′′ seja positiva definida em Br (x0 ). De fato, considere f (x, y) =
5x2 − y 2 . Então ∆f (x, y) = 8 para todo (x, y) ∈ R2 .
No que segue formularemos condições simples para que a matriz
Hessiana seja diagonalizável.
Definição 7.12: Se f : Ω → R é uma função diferenciável em Ω e
f ′ : Ω → Rn é uma função de classe C 1 em x0 ∈ Ω, dizemos que f é
de classe C 2 em x0 .
Proposição 7.13: Seja f : Ω → R uma função duas vezes diferenciável no aberto Ω ⊂ Rn . Se f é de classe C 2 em x0 ∈ Ω então a matriz
Hessiana [f ′′ (x0 )] é simétrica.
Prova: A prova se reduz ao caso n = 2 (veja o Lema a seguir).
De fato, sejam h, k ∈ Rn dois vetores quaisquer e defina g(t, s) =
f (x0 + th + sk), para s e t suficientemente pequenos. Então, segue
da Regra da Cadeia
∂ 2g
(0, 0) = f ′′ (x0 )h : k
∂t∂s
∂ 2g
(0, 0) = f ′′ (x0 )k : h
∂s∂t
Derivadas de Ordem Superior
119
e temos a conclusão se
∂ 2g
∂ 2g
(0, 0) =
(0, 0)
∂t∂s
∂s∂t
Observação: A hipótese “f de classe C 2 em x0 ” na Proposição
acima é essencial. De fato, considere a função
f (x, y) =
(
xy(x2 − y 2 )
x2 + y 2
0
se (x, y) 6= (0, 0)
senão
Então, um cálculo direto mostra que
∂ 2f
(0, 0) = 1
∂x∂y
e
∂ 2f
(0, 0) = −1.
∂y∂x
Lema 7.14: Seja g: R2 → R função duas vezes diferenciável com
derivadas parciais segundas contı́nuas em (0, 0). Então,
∂ 2g
∂ 2g
(0, 0) =
(0, 0).
∂t∂s
∂s∂t
Prova: Seja Φ(s, t) = g(s, t) − g(s, 0) − g(0, t) + g(0, 0). Para t
fixado, consideremos a função ϕ(s) = g(s, t) − g(s, 0) que é derivável
na variável s. O Teorema do Valor Médio garante a existência de
0 < θ1 < 1 tal que
∂g
∂g
′
(θ1 s, t) −
(θ1 s, 0) .
Φ(s, t) = ϕ(s) − ϕ(0) = sϕ (θ1 s) = s
∂s
∂s
(7.7)
Aplicando novamente o TVM (com relação à variável t) no termo da
direita de (7.7), obtemos para algum 0 < θ2 < 1
Φ(s, t) = st
∂ 2g
θ1 s, θ2 t .
∂t∂s
(7.8)
Para s fixado, consideremos a função ψ(t) = g(s, t) − g(0, t) que
é derivável na variável t. De modo análogo ao anterior, existem
120
Cálculo Avançado I
0 < θ3 , θ4 < 1 tais que
Φ(s, t) = ψ(t) − ψ(0) = tψ ′ (θ3 t)
∂g
∂g
=t
(s, θ3 t) −
(0, θ3 t)
∂t
∂t
∂ 2g
= st
θ4 s, θ3 t .
∂s∂t
(7.9)
De (7.8) e (7.9) obtemos a igualdade
st
∂ 2g
∂ 2g
θ1 s, θ2 t = st
θ4 s, θ3 t , ∀s, t.
∂t∂s
∂s∂t
A conclusão da prova segue da passagem ao limite para (s, t) → (0, 0)
e da continuidade em (0, 0) das derivadas parciais de segunda ordem
de g.
Sintetizando os resultados anteriores, temos o seguinte critério:
Corolário 7.15: Seja Ω ⊂ Rn aberto e f : Ω → R uma função de
classe C 2 . Se ∆f (x0 ) > 0 então existe R > 0 tal que para todo r ≤ R
o máximo de f sobre a aderência da bola Br (x0 ) é atingido sobre a
fronteira kx − x0 k = r. Em particular, se f ′ (x0 ) = 0, então x0 não é
máximo local de f em Ω.
Partição da unidade
Nesta Seção apresentamos um resultado geral importante, do qual
faremos uso na prova do Teorema de Gauss (veja Capı́tulo 13). Tratase do Teorema da Partição da Unidade.
O conjunto das fuções reais definidas em Rn que possuem derivadas
de todas as ordens será denotado por C ∞ (Rn , R).
Definição 7.16: Seja A ⊂ Rn . Dizemos que Φ ⊂ C ∞ (Rn , R) é uma
partição da unidade de A se as seguintes propriedades são satisfeitas:
(1) 0 ≤ φ(x) ≤ 1 para todo x ∈ Rn e para todo φ ∈ Φ;
(2) Para todo x ∈ A, existe r > 0 tal que
φ ∈ Φ ; φ(y) > 0, ∀y ∈ Br (x)
é finito;
Derivadas de Ordem Superior
(3) Para todo x ∈ A,
X
121
φ(x) = 1;
φ∈Φ
Se U = {Uλ }λ∈Λ é uma cobertura aberta de A, dizemos que Φ é
subordinada a U se,
(4) para todo φ ∈ Φ, existe Uλ ∈ U e Bλ ⊂ Uλ conjunto fechado tal
que φ(x) = 0 para todo x ∈ Uλ \ Bλ .
Teorema 7.17: Sejam A ⊂ Rn e U uma cobertura aberta de A.
Então existe Φ ⊂ C ∞ (Rn , R) uma partição de A subordinada a U.
A prova do Teorema 7.17 que apresentaremos faz uso dos seguintes
resultados preliminares:
Lema 7.18: Sejam K ⊂ U ⊂ Rn , K compacto e U aberto. Então,
podemos determinar B compacto e ψ : Rn → [0, 1] de classe C ∞ tais
que
◦
K ⊂B ⊂ B ⊂ U,
1 se x ∈ K,
◦
ψ(x) =
0 se x ∈ Rn \ B.
(7.10)
(7.11)
Prova: Seja d = inf{kx − yk2 ; x ∈ K, y ∈ U c }. É claro que d > 0,
de modo que podemos considerar a cobertura aberta
Bd/2 (x)
x∈K
.
Como K é compacto, existem x1 , x2 , . . . , xm em K tais que
K⊂
Assim, B =
Sm
j=1
m
[
Bd/2 (xj ).
j=1
Bd/2 (xj ) satisfaz (7.10).
Seja g : Rn → R definida por
g(x) =
exp −(kxk22 − 1)−2
0
se kxk2 < 1,
se kxk2 ≥ 1
122
Cálculo Avançado I
(deixamos ao leitor
verificar que g é função de classe C ∞ em Rn ) e
Pm
considere f (x) = j=1 gj (x), onde
gj (x) = g
x − xj
d/2
.
◦
Então, f (x) > 0 se, e somente se, x ∈B. Como K é compacto, existe
x ∈ K tal que
µ = f (x) = min f (x) ; x ∈ K > 0.
Seja ρ : R → R função de classe C ∞ tal que 0 < ρ(s) < 1 para todo
0 < s < µ e (veja Exercı́cios)
ρ(s) =
0 se s ≤ 0,
1 se s ≥ µ.
Então a função ψ(x) = ρ(f (x)) satisfaz (7.11) e concluı́mos a prova.
Lema 7.19: Seja K ⊂ Rn compacto e U uma cobertura aberta de K.
Então existe Φ ⊂ C ∞ (Rn , R) partição da unidade de K subordinada
a uma subcobertura finita de U
Prova: Sejam U1 , U2 , . . . , Um ∈ U tais que K ⊂ U1 ∪ · · · ∪ Um .
Considere
K1 = K \ (U2 ∪ U3 ∪ · · · ∪ Um ).
É claro que K1 é compacto e K1 ⊂ U1 . Pelo Lema 7.18, existe B1
compacto tal que
◦
K 1 ⊂ B 1 ⊂ B 1 ⊂ U1 ,
de modo que (verifique!)
◦
K ⊂ B 1 ∪ U2 ∪ U3 ∪ · · · ∪ Um .
Considere então
◦
K 2 = K \ ( B 1 ∪ U3 ∪ · · · ∪ Um )
(7.12)
Derivadas de Ordem Superior
123
Então, K2 é compacto e, como consequência de (7.12), K2 ⊂ U2 .
E assim, sucessivamente, construı́mos compactos B1 , B2 , . . . , Bm tais
que
◦
K ⊂ B ⊂ B ⊂ U , i = 1, . . . , m,
i
K
i
◦
⊂B1
∪
i
i
◦
B2 ∪ · · · ∪
◦
Bm
Para cada i = i, . . . , m, o Lema 7.18 nos garante que existe ψi : Rn →
[0, 1] de classe C ∞ , satisfazendo
(
ψi (x) = 1 se x ∈ Ki ;
ψi (x) = 0 se x ∈ Bic ;
Sm ◦
Seja U = i=1 Bi . Como ψ1 (x) + · · · + ψm (x) > 0 para todo x ∈ U ,
definimos φi : Rn → R, por φi (x) = 0 se x ∈ U c e
φi (x) =
ψi (x)
ψ1 (x) + · · · + ψm (x)
se x ∈ U .
Considere ρ : U → [0, 1] de classe C ∞ tal que
(
ρ(x) = 1 se x ∈ K;
ρ(x) = 0 se x ∈ U c .
Então o conjunto Φ = ρφ1 , . . . , ρφm satisfaz as condições (1)–(4)
da Definição 7.16, subordinada à subcobertura U1 , . . . , Um .
Observação: Como se pode depreender da prova do Lema 7.19,
se K é compacto, sempre existe uma partição da unidade Φ contendo um número finito de funções, de modo que a condição (2) na
Definição 7.16 é automaticamente satisfeita, qualquer que seja r > 0.
Prova do Teorema 7.17: Procederemos em três etapas:
Etapa 1: Vamos supor
A = K1 ∪ K2 ∪ K3 . . . ,
◦
Ki compacto e Ki ⊂ K i+1 , i = 1, 2, . . . .
124
Cálculo Avançado I
Para i ≥ 2, considere
n
◦
o
U2 = Uλ ∩ K3
,
λ∈Λ
n
◦
o
Ui = Uλ ∩ K i+1 \Ki−2
λ∈Λ
É claro que Ui é cobertura aberta de Ki . Então, o Lema 7.19 nos
garante a existência de uma partição da unidade Φi de Ki subordinada a Ui , com cada Φi contendo um número finito de funções.
Seja x ∈ A. Então, x ∈ Ki0 para algum i0 ∈ N. Observe que se
φ ∈ Φj com j ≥ i0 + 2, então φ(x) = 0. Logo,
∞ X
X
φ(x) =
i=1 φ∈Φi
iX
0 +1
X
i=1 φ∈Φi
φ(x) < ∞
e a função σ : Rn → R,
σ(x) =
∞ X
X
φ(x)
i=1 φ∈Φi
está bem definida. Consideremos a famı́lia
n
o
Φ = φ/σ ; φ ∈ Φ1 ∪ Φ2 ∪ · · · .
Então, Φ é uma partição da unidade de K subordinada a U.
Etapa 2: Vamos supor A aberto. Neste caso, considere
Ki = x ∈ A ; dist(x, ∂A) ≥ 1/i ∩ Bi (0),
i = 1, 2, . . . .
É claro que Ki é compacto e A = K1 ∪ K2 ∪ · · ·. A conclusão segue
da Etapa 1.
Etapa 3: No caso geral, seja U a união de todos os abertos da cobertura U. Então, A ⊂ U e, pela Etapa 2, existe uma partição da
unidade de U , que também é partição da unidade de A.
Derivadas de Ordem Superior
125
Exercı́cios
Exercı́cio 7.1. Seja f : Rn → Rm linear. Mostre que f ′ (x) = f ,
∀x ∈ Rn , isto é, f ′ (x)h = f (h), ∀x, h ∈ Rn . Observe também que f ′
é constante e, portanto, f ′′ ≡ 0.
Exercı́cio 7.2. Seja ϕ: Rn → Rn função diferenciável tal que
kϕ′ (x)kL(Rn ) ≤ α,
∀x ∈ Rn .
a) Se α < 1, mostre que ϕ é uma contração e demonstre que para
cada y ∈ Rn , existe um único x ∈ Rn tal que y = x + ϕ(x).
b) Podemos afirmar que ϕ é uma contração se kϕ′ (x)kL(Rn ) < 1,
∀x ∈ Rn ?
c) Use o item (a) para mostrar que se A é uma matriz n × n tal que
kAk < 1 então (I + A) é invertı́vel.
d) Se ϕ é monótona positiva, mostre que para cada y ∈ Rn , existe
um único x ∈ Rn satisfazendo y = x + ϕ(x) (mesmo que α ≥ 1).
Exercı́cio 7.3. Seja C ⊂ Rn convexo e fechado e PC : Rn → Rn a
projeção ortogonal sobre C (veja Exercı́cio 4.15). Mostre que PC é
função monótona positiva. Conclua que
1
x 7→ f (x) = x − PC (x) : PC (x)
2
é função convexa.
Exercı́cio 7.4. Calcule f ′′ (x) para cada uma das funções f : Rn → R.
Observe que em todos os casos f ′ é linear e portanto f ′′ : Rn → Mn×n
é constante.
1
1
kxk22 , f (x) = kAxk22 ,
2
2
f (x) = hAx : xi, f (x) = hAx : Bxi.
f (x) =
Exercı́cio 7.5. Considere f : Rn → R função duas vezes diferenciável
e A uma matriz n × n. Defina g(x) = f (Ax). Mostre que g é duas
vezes diferenciável em Rn e
g ′ (x) = AT f ′ (Ax)
g ′′ (x) = AT f ′′ (Ax)A
126
Cálculo Avançado I
Exercı́cio 7.6. Considere a matriz simétrica
a b
A=
, a, b, c ∈ R.
b c
Mostre que A é positiva definida se e somente se det A > 0 e a > 0.
Mostre que se A é semipositiva definida, então det A ≥ 0 e a ≥ 0 mas
a recı́proca é falsa.
Exercı́cio 7.7. Seja f : Rn → R função duas vezes diferenciável tal
que f (tx) = t2 f (x) para todo x ∈ Rn e todo t ∈ R. Mostre que
f (x) =
1 ′′
f (0)x : x ,
2
∀x ∈ Rn .
Exercı́cio 7.8. Seja D = {x ∈ R2 ; kxk22 ≤ 1}. Considere f : R2 → R2
de classe C 1 tal que
Jf (x) 6= 0 ∀x ∈ D
e
kf (x) − xk2 ≤
1
3
∀x ∈ D.
Mostre que existe x0 ∈ D tal que f (x0 ) = 0.
Exercı́cio 7.9.
a) Seja A matriz n × n semipositiva definida, isto é hAx : xi ≥ 0
∀x ∈ Rn e defina a função g(x) = Ax. Mostre que g é monótona
positiva. Seja Fλ (x) = x + λAx, com λ > 0. Mostre que Fλ é
bijetora em Rn .
b) Seja f monótona positiva e considere Fλ (x) = x + λf (x), com
λ > 0. Mostre que Fλ é injetora. Se Fλ0 é sobrejetora para
algum λ0 , mostre que Fλ é sobrejetora para todo λ > 0.
Sugestão: Dado y ∈ Rn , considere a função
Φλ (x) =
Fλ−1
0
λ0
λ − λ0
y+
x .
λ
λ
Mostre que Φλ é contração para λ > λ0 /2. Repita o argumento
para λ0 /2 < λ1 < λ0
Derivadas de Ordem Superior
127
Exercı́cio 7.10. (Método de Newton) Seja f : Rn → Rn função de
classe C 1 tal que Jf (x) 6= 0, ∀x ∈ Rn . Considere a sequência:
x 0 ∈ Rn
e
xk+1 = xk − f ′ (xk )−1 f (xk ),
k≥0
(7.13)
a) Mostre que se xk −→ x̄, então f (x̄) = 0.
b) Reciprocamente, suponha que f é duas vezes diferenciável com
f ′′ limitada. Se f (x̄) = 0 para algum x̄, mostre que a sequência
definida por (7.13) converge para x̄ se x0 for tomado suficientemente próximo de x̄.
Exercı́cio 7.11. (A Transformada de Legendre) Seja g : Rn → R
função estritamente convexa e fortemente coerciva, isto é,
g(x)
= +∞.
kxk2 →+∞ kxk2
lim
(a) Mostre que existe ϕ : Rn → Rn tal que g ∗ definida por
g ∗ (x) := x : ϕ(x) − g ϕ(x)
é convexa e fortemente coerciva. Sug.: considere
sup hx : yi − g(y) ; y ∈ Rn .
(b) Suponha g de classe C 1 . Mostre que g ′ é invertı́vel com ϕ sua
inversa Sug.: aplique o Teorema 7.4.
(c) Suponha que g é de classe C 2 . Mostre que g ∗ é estritamente
convexa, de classe C 2 e ∇g ∗ (x) = ϕ(x), para todo x ∈ Rn . Sug.:
aplique o Teorema 5.18.
(c’) A condição g de classe C 2 no item anterior não é necessária.
Mostre que se g é de classe C 1 , o mesmo vale para g ∗ e seguemse as mesmas conclusões do item (c).
(d) Nas condições acima, mostre que
g ∗∗ (x) := sup x : y − g ∗ (y) = g(x).
y∈Rn
Exercı́cio 7.12. Seja µ > 0. Dê exemplo de uma função ρ : R → R
de classe C ∞ tal que 0 < ρ(s) < 1 para todo 0 < s < µ e
0 se s ≤ 0,
ρ(s) =
1 se s ≥ µ.
8
O Teorema da Função Inversa
Neste capı́tulo abordaremos um dos resultados centrais da Análise: o
Teorema da Função Inversa.
À guisa de motivação, consideremos a função linear g: Rn → Rn
definida por g(x) = Ax, onde A é uma matriz n × n. Sabemos da
Álgebra Linear que se det A 6= 0, então g é invertı́vel e sua inversa
g −1 : Rn → Rn é dada por g −1 (x) = A−1 x.
Vimos também que g (resp. g −1 ) é diferenciável em Rn e g ′ (x0 ) = A
′
(resp. g −1 (x0 ) = A−1 ), qualquer que seja x0 ∈ Rn .
Se Ω ⊂ Rn é um conjunto aberto e f : Ω → Rn é uma função diferenciável em x0 ∈ Ω, então sabemos que f ′ (x0 ): Rn → Rn é a função
linear que “melhor aproxima” f nas proximidades de x0 , no sentido
dado por (5.2). Seria, portanto, natural esperar que
se f : Ω → Rn é diferenciável em x0 ∈ Ω e
Jf (x0 ) = det f ′ (x0 ) 6= 0,
então f é invertı́vel nas proximidades de x0 .
Com um pouco mais de atenção podemos observar que um tal resultado não pode ser verdadeiro, mesmo para n = 1.
De fato, consideremos f : R → R a função definida por
x + x2 sen 1
se x 6= 0,
x
f (x) = 2
0
se x = 0.
130
Cálculo Avançado I
É imediato verificar que f é diferenciável em todos os pontos de R e
1
1
1
+ 2x sen − cos
x
x
f ′ (x) = 2
1
2
se x 6= 0,
se x = 0.
Se f fosse invertı́vel numa vizinhança de x0 = 0, então seria necessariamente injetora nessa vizinhança. Como f ′ (0) = 1/2, seria
necessariamente crescente nessa vizinhança. Mas isso é impossı́vel
porque f ′ (x) muda de sinal (infinitas vezes!) em qualquer vizinhança
que contenha x0 = 0.
Observe que se f ′ fosse contı́nua em x0 = 0, então f ′ (x) > 0 para x
suficientemente próximo de x0 = 0 e terı́amos o resultado desejado.
O teorema da função inversa
O Teorema da Função Inversa é verdadeiro para funções f : V → V ,
onde V é um espaço de Banach. Nesta seção veremos uma demonstração especı́fica para o caso de V = Rn . No que segue estaremos
denotando indistintamente por k k a norma euclidiana k k2 de Rn
e a norma induzida k kL(Rn ,Rn ) definida por (4.12).
Teorema 8.1: Seja Ω ⊂ Rn aberto e f : Ω → Rn função de classe
C 1 tal que Jf (x0 ) 6= 0. Então existe δ0 > 0 tal que
a) f é injetora em U = Bδ0 (x0 );
b) V = f (U ) é aberto;
c) f
−1
1
: V → U é de classe C e
h
f
−1 ′
h
i−1
′
(f (x0 )) = f (x0 )
.
Prova: Faremos a prova em quatro etapas.
i
Etapa 1: ∃ δ1 > 0 tal que f é injetora em Bδ1 (x0 ).
Seja A = f ′ (x0 ). Como Jf (x0 ) 6= 0, A−1 está definida. Como f é
de classe C 1 , dado ε > 0, existe δ > 0 (dependendo de ε e x0 ) tal que
kx − x0 k < δ
⇒
kf ′ (x) − Ak < ε
Tome x ∈ Bδ (x0 ) e h 6= 0 tal que x + h ∈ Bδ (x0 ).
(8.1)
O Teorema da Função Inversa
131
Afirmativa 1: f (x + h) 6= f (x) se δ é suficientemente pequeno.
De fato, seja ϕ: [0, 1] → Rn definida por ϕ(t) = f (x + th) − tAh.
Então ϕ é de classe C 1 em ]0, 1[ e ϕ′ (t) = f ′ (x + th)h − Ah. Além
disso,
Z 1
ϕ(1) − ϕ(0) =
ϕ′ (t) dt,
0
isto é,
f (x + h) − Ah − f (x) =
Z
1
0
Em particular,
kf (x + h) − f (x) − Ahk ≤
Z
1
0
f ′ (x + th) − A h dt.
kf ′ (x + th) − Akkhk dt.
Como x + th ∈ Bδ (x0 ), ∀t ∈ [0, 1], segue de (8.1) que
kf (x + h) − f (x) − Ahk < εkhk.
(8.2)
Visto que khk = kA−1 Ahk ≤ kA−1 kkAhk, obtemos de (8.2)
−1
kf (x + h) − f (x)k > 1 − εkA k kAhk.
(8.3)
Escolhendo-se ε = 12 kA−1 k−1 e δ1 o δ correspondente, temos de (8.3):
kf (x + h) − f (x)k >
1
kAhk.
2
Como A é invertı́vel, Ah 6= 0 ∀h 6= 0, o que demonstra a afirmativa.
Etapa 2: ∃ δ2 > 0 tal que f Bδ2 (x0 ) é aberto.
Como f é de classe C 1 , x 7→ Jf (x) é função contı́nua. Logo, ∃δ̃ > 0
tal que Jf (x) 6= 0 ∀x ∈ Bδ̃ (x0 ).
Seja δ2 = min{δ1 , δ̃}. Então Jf (x) 6= 0 ∀x ∈ Bδ2 (x0 ) e f é injetora
em Bδ2 (x0 ).
Provemos que W = f Bδ2 (x0 ) é um conjunto aberto.
132
Cálculo Avançado I
Seja y1 ∈ W . Então existe um único x1 ∈ Bδ2 (x0 ) tal que f (x1 ) =
y1 . Tome r > 0 tal que Br (x1 ) ⊂ Bδ2 (x0 ) e considere
K = ∂Br (x1 ) e
u(x) = kf (x) − f (x1 )k,
onde ∂B denota a fronteira de B. Como K é compacto e u é função
contı́nua, existe x∗ ∈ K tal que
m: = inf{u(x) ; x ∈ K} = u(x∗ ).
Observe que x∗ ∈ K ⇒ x∗ 6= x1 ⇒ f (x∗ ) 6= f (x1 ) ⇒ m > 0.
Afirmativa 2: Bm/2 f (x1 ) ⊂ f Br (x1 ) ⊂ W .
Com efeito, tome ȳ ∈ Bm/2 f (x1 ) . Isto é, kȳ − f (x1 )k < m/2.
Defina w(x): = kf (x) − ȳk. Como Br (x1 ) é compacto, ∃x̄ ∈ Br (x1 )
tal que
w(x̄) = min{w(x) ; x ∈ Br (x1 )}.
Observe que
w(x̄) = kf (x̄) − ȳk ≤ kf (x1 ) − ȳk < m/2.
Observe também que se x ∈ K, então
w(x) = kf (x) − ȳk ≥ kf (x) − f (x1 )k − kf (x1 ) − ȳk ≥ m −
m
m
= .
2
2
Portanto x̄ 6∈ K, o que implica x̄ ∈ Br (x1 ).
Afirmativa 3: f (x̄) = ȳ, isto é ȳ ∈ f Br (x1 )
Com efeito, se x̄ é ponto de mı́nimo de w(x) em Br (x1 ), então x̄
também é ponto de mı́nimo de g(x) = 12 kf (x) − ȳk22 . Como x̄ é ponto
interior, g ′ (x̄)h = 0, ∀h ∈ Rn , o que implica que ∀h ∈ Rn
D
T
E
0 = g ′ (x̄)h = f (x̄) − ȳ; f ′ (x̄)h = f ′ (x̄) f (x̄) − ȳ ; h
Portanto,
T
f ′ (x̄) f (x̄) − ȳ = 0.
T
Como det f ′ (x̄) = det f ′ (x̄) = Jf (x̄) 6= 0, segue que f (x̄) = ȳ, e
a afirmativa esta provada.
O Teorema da Função Inversa
133
Etapa 3: Se U = Bδ2 (x0 ) e V = f (U ), então f −1 : V → U é diferenciável.
Seja y ∈ V e tome r > 0 tal que y + k ∈ V ∀k tal que kkk < r e
h = f −1 (y +k) −f −1 (y) = f −1 (y +k) −x. Então k = f (x +h) −f (x).
Como f é diferenciável, temos k = f ′ (x)h + ef (h).
Se x ∈ U , então Jf (x) =
6 0 e f ′ (x) é invertı́vel. Assim, seja B =
′ −1
f (x) . Então
Bk = h + Bef (h)
Portanto,
f −1 (y + k) = f −1 (y) + Bk − Bef (h)
Para provar que f −1 é diferenciável, basta provar que
kBef (h)k
=0
k→0
kkk
lim
(8.4)
Como na Etapa 1,
kkk = kf (x + h) − f (x)k ≥
1
kAhk
2
Como khk ≤ kA−1 kkAhk, temos
kAhk ≥
Portanto,
kkk ≥
e
0≤
1
khk.
kA−1 k
1
khk
2kA−1 k
kBef (h)k
kBkkef (h)k
kef (h)k
≤
= 2kA−1 kkBk
1
kkk
khk
khk
2kA−1 k
o que implica (8.4).
Logo, f −1 é diferenciável em y = f (x) e
′
−1
f −1 (y) = f ′ (x)
134
Cálculo Avançado I
Etapa 4: f −1 : V → U é de classe C 1 .
Vamos denotar A = f ′ (x1 ) e B = f ′ (x2 ). Visto que B −1 − A−1 =
−1
B (A − B)A−1 , obtemos
kB −1 − A−1 k ≤ kB −1 kkA − BkkA−1 k
Por outro lado, temos para todo h ∈ Rn ,
khk ≤ kA−1 kkAhk ⇒ kAhk ≥
de modo que
(8.5)
khk
,
kA−1 k
kBhk ≥ kAhk − k(A − B)hk ≥ kAhk − k(A − B)kkhk
khk
≥
− k(A − B)kkhk.
kA−1 k
Portanto
1
kBhk ≥
− kA − Bk khk.
kA−1 k
Como f é de classe C 1 , dado 0 < ε ≤ 1/2kA−1 k, existe δ > 0 tal que
kx2 − x1 k < δ ⇒ kB − Ak < ε.
Portanto, se kx1 − x2 k < δ, temos
kBhk ≥
Tomando k = Bh vemos que
1
khk.
2kA−1 k
kB −1 kk ≤ 2kA−1 kkkk ⇒ kB −1 k ≤ 2kA−1 k.
(8.6)
Portanto, se kx1 − x2 k < δ, concluı́mos de (8.5) e (8.6)
kB −1 − A−1 k < 2kA−1 k2 kA − Bk < 2εkA−1 k2 .
Definição 8.2: Seja f : U → V uma função bijetora. Dizemos que f
é um homeomorfismo entre U e V se f e f −1 são contı́nuas. Dizemos
que f é um difeomorfismo entre U e V se f e f −1 são diferenciáveis.
Com a terminologia da definição acima, podemos enunciar o Teorema da Função Inversa da seguinte maneira:
Teorema 8.1: Se f é função de classe C 1 e Jf (x0 ) 6= 0, então existem
vizinhanças abertas U e V respectivamente de x0 e f (x0 ) tais que f
é difeomorfismo de classe C 1 entre U e V .
O Teorema da Função Inversa
135
Aplicação: o método das caracterı́sticas
Como exemplo de aplicação direta do Teorema da Função Inversa,
vamos considerar nesta seção o Método das Caracterı́sticas para a
solução de equações a derivadas parciais de primeira ordem.
Problema: Seja γ uma curva de R2 parametrizada por
γ: I → Ω, onde I é um intervalo de R e Ω um aberto de R2 .
Sejam a, b, c: Ω → R funções dadas.
Determinar uma função ϕ(x, y) solução da equação
a(x, y)
∂ϕ
∂ϕ
+ b(x, y)
= c(x, y),
∂x
∂y
(8.7)
cujos valores sobre a curva γ são prescritos, isto é, ϕ γ(ξ) =
ϕ0 (ξ) onde ϕ0 : I → R é uma função dada.
A solução do problema acima pode ser obtida via uma mudança
apropriada de coordenadas, que pode ser intuı́da pelo seguinte argumento: fixado um ponto
γ0 = γ(s0 ) = (x0 , y0 ) de γ, considere a
curva Γ(ξ) = x(ξ),y(ξ) que passa por γ0 , isto é, Γ(0) = γ0 . Defina
z(ξ) = ϕ x(ξ), y(ξ) , onde ϕ é solução de (8.7). Se Γ é diferenciável,
temos pela Regra da Cadeia,
dx ∂ϕ dy ∂ϕ
dz
= Γ′ (ξ); ∇ϕ(Γ(ξ)) =
+
.
dξ
dξ ∂x
dξ ∂y
Portanto, se Γ satisfaz o sistema de equações diferenciais ordinárias
dx
= a(x, y),
dξ
dy
= b(x, y),
dξ
x(0) = x0 ,
(8.8)
y(0) = y0 ,
podemos obter a solução ϕ resolvendo
dz
= c(x, y),
dξ
z(0) = ϕ0 (s0 ).
136
Cálculo Avançado I
Se repetirmos o argumento anterior para todos os pontos γ(s), s ∈ I,
obtemos uma famı́lia de curvas — as curvas caracterı́sticas — sobre
as quais a solução ϕ pode ser determinada.
Antes de analisarmos as condições para as quais o método funciona
(e onde entra em cena o Teorema da Função Inversa), vejamos um
exemplo cuja solução explı́cita pode ser calculada.
Exemplo: Considere γ(s) = (s, s2 ). Determinar ϕ(x, y) solução de
x
∂ϕ
∂ϕ
+y
= xy
∂x
∂y
(8.9)
tal que ϕ(γ(s)) = sen(s2 ), para todo s ∈ R.
Solução: Consideremos o sistema (equações caracterı́sticas)
dx
= x,
dξ
dy
= y,
dξ
dz = xy,
dξ
x(0, s) = s,
y(0, s) = s2 ,
(8.10)
z(0, s) = sen(s2 )
Resolvendo as duas primeiras equações de (8.10), obtemos
(
x(ξ, s) = seξ ,
y(ξ, s) = s2 eξ .
(8.11)
Substituindo (8.11) na terceira equação de (8.10) e resolvendo, obtemos
s3
z(ξ, s) = (e2ξ − 1) + sen(s2 ).
(8.12)
2
Explicitando ξ e s em função de x e y e substituindo em (8.12),
encontramos a solução
y 2
1
1 y 3
z = ϕ(x, y) = xy −
+ sen
.
2
2 x
x
O Teorema da Função Inversa
137
O exemplo evidencia o ponto-chave do método. De fato, a solução
das duas primeiras equações de (8.10) define uma mudança de variáveis, isto é, uma função
f : R2 →
R2 ,
(ξ, s) 7→ (x, y).
Se f é invertı́vel, então obtemos a solução por
ϕ(x, y) = z(ξ, s) = z ◦ f −1 (x, y).
Pelo Teorema da Função Inversa, se Jf (0, s) 6= 0 para todo s em
algum intervalo I, então f admite uma inversa numa vizinhança de
γ(I). Considerando os dados do problema, a saber, a curva inicial
γ(s) = (γ1 (s), γ2 (s)) e o campo de vetores (x, y) 7→ a(x, y), b(x, y) ,
a condição
a(γ(s)) b(γ(s))
Jf γ(s) =
6= 0
γ1′ (s)
γ2′ (s)
indica que os vetores (a(γ(s)), b(γ(s))) e (γ1′ (s), γ2′ (s)) são linearmente
independentes. Temos, portanto, uma condição geométrica para que
o método forneça solução, a saber, que o campo (a, b) seja transversal
à curva γ.
O Teorema da função inversa (bis)
A prova do Teorema da Função Inversa apresentada na primeira
seção deste capı́tulo restringe o resultado a espaços de dimensão
finita, visto que utiliza a compacidade da bola fechada. Nesta seção
apresentamos uma prova que não faz uso desse fato e que estende o
resultado a espaços de Banach de dimensão infinita.
No que segue denotamos indistintamente por k k uma norma qualquer de Rn e a norma induzida k kL(Rn ;Rn ) definida por (4.12).
Lema 8.3: (Perturbação da Identidade) Seja U um aberto de Rn e
ϕ: U → Rn uma contração em U . Se f (x) = x − ϕ(x), então f (U ) é
aberto e f é homeomorfismo entre U e f (U ).
Prova: Faremos a prova em duas etapas.
138
Cálculo Avançado I
Etapa 1: f (U ) é aberto.
Por hipótese, existe 0 < α < 1 tal que kϕ(x) − ϕ(y)k ≤ αkx − yk
para todo x, y ∈ U . Seja y ∈ f (U ) e x ∈ U tal que y = f (x). Se
R = r(1−α)/2, onde r > 0 é tal que Br (x) ⊂ U , então BR (y) ⊂ f (U ).
De fato, seja y ∈ BR (y) e considere a sequência definida pela recorrência
x0 = x,
xk+1 = y + ϕ(xk ), k ≥ 0.
Afirmativa 1: xk ∈ U , ∀k ∈ N, e, consequentemente, {xk }k está bem
definida. De fato,
kx1 − xk = ky + ϕ(x) − xk = ky − yk < R < r/2.
(8.13)
Suponhamos que xj ∈ Br/2 (x), para todo j = 1, . . . , k − 1. Então,
kxk − xk−1 k = kϕ(xk−1 ) − ϕ(xk−2 )k
≤ αkxk−1 − xk−2 k ≤ . . . ≤ αk−1 kx1 − x0 k
e obtemos
kxk − xk ≤ kxk − xk−1 k + · · · + kx1 − xk
≤ (αk−1 + · · · + 1)kx1 − xk
1
r
<
R= .
1−α
2
(8.14)
De (8.13) e (8.14) concluı́mos, por indução, que xk ∈ Br/2 (x) ⊂ U ,
∀k ∈ N.
Afirmativa 2: {xk }k é sequência de Cauchy.
De fato, se l > k, então
kxl − xk k ≤ kxl − xl−1 k + · · · + kxk+1 − xk k ≤
(αl−1 + · · · + αk )kx1 − x0 k ≤
αk
kx1 − x0 k.
1−α
Como α < 1, dado ε > 0, existe k0 ∈ N tal que αk < (1 − α)ε/R se
k ≥ k0 . Portanto, para l > k > k0 , temos kxl − xk k < ε.
O Teorema da Função Inversa
139
Das afirmativas 1 e 2 concluı́mos que existe x ∈ Br/2 (x) ⊂ U tal
que xk → x. Segue que x = y + ϕ(x), ou equivalentemente y = f (x),
o que implica y ∈ f (U ) e concluı́mos que f (U ) é aberto.
Etapa 2: f é homeomorfismo entre U e f (U ).
Como ϕ é contração, temos
kf (x1 ) − f (x2 )k ≥ kx1 − x2 k − kϕ(x1 ) − ϕ(x2 )k
≥ (1 − α)kx1 − x2 k,
∀x1 , x2 ∈ U.
(8.15)
De (8.15) concluı́mos que f é injetora em U . Portanto f −1 : f (U ) →
U está bem definida. Igualmente de (8.15) concluı́mos que f −1 é
contı́nua, pois
kf −1 (y1 ) − f −1 (y2 )k ≤
1
ky1 − y2 k.
1−α
Corolário 8.4: Sejam A, B ∈ L(Rn , Rn ) com A invertı́vel. Se kA −
Bk < 1/kA−1 k então B é invertı́vel.
Prova: Seja ϕ = I − A−1 B = A−1 (A − B). Como
kI − A−1 Bk ≤ kA−1 kkA − Bk < 1,
ϕ é contração em Rn . Pelo Lema 8.3, f = I − ϕ = A−1 B é homeomorfismo em Rn e concluı́mos a prova.
Teorema 8.5: Seja Ω ⊂ Rn aberto e f : Ω → Rn função de classe
C 1 tal que Jf (x0 ) 6= 0. Então existe U ⊂ Ω vizinhança aberta de x0
tal que
a) V = f (U ) é aberto em Rn ;
b) f : U → V é difeomorfismo de classe C 1 .
Prova: Faremos a prova em três etapas.
Etapa 1: Existe δ1 > 0 tal que f Bδ1 (x0 ) é aberto e f é homeomorfismo entre Bδ1 (x0 ) e sua imagem.
De fato, seja A = f ′ (x0 ) e considere ϕ = I − A−1 ◦ f . Como
ϕ′ (x0 ) = 0 e ϕ′ é contı́nua, existe δ1 > 0 tal que kϕ′ (x)k ≤ α < 1
para todo x ∈ Bδ1 (x0 ). Portanto ϕ é contração em Bδ1 (x0 ). Pelo
140
Cálculo Avançado I
−1
Lema 8.3, g = I −
ϕ = A ◦ f é homeomorfismo entre Bδ1 (x0 ) e o
aberto g Bδ1 (x0 ) .
Como A é uma função aberta (A é inversa de função
contı́nua A−1 ),
temos em particular f Bδ1 (x0 ) = A g(Bδ1 (x0 )) aberto e
f : Bδ1 (x0 ) → f Bδ1 (x0 )
é homeomorfismo.
Etapa 2: Existe δ2 > 0 tal que f : Bδ2 (x0 ) → f Bδ2 (x0 ) é difeomorfismo.
De fato, como f é de classe C 1 , dado ε = 1/kA−1 k existe δ2 > 0
tal que se kx − x0 k < δ2 , então kf ′ (x) − Ak < ε. Segue portanto do
Corolário 8.4 que f ′ (x) é invertı́vel para todo x ∈ Bδ2 (x0 ).
Etapa 3: (f ′ )−1 é contı́nua em f Bδ2 (x0 ) .
Podemos repetir o argumento da etapa 4 da prova do Teorema 8.1.
Observação: O Lema 8.3 e o seu Corolário permanecem válidos se
substituirmos em seus enunciados Rn por um espaço de Banach V
qualquer. Como consequência, substituindo a condição “Jf (x0 ) 6= 0”
por “f ′ (x0 ) invertı́vel”, temos o Teorema da Função Inversa para
aplicações de classe C 1 f : V → V definidas em um espaço de Banach
V qualquer.
Exercı́cios
Exercı́cio 8.1. Seja f : R2 → R2 definida por
f (x, y) = (ex cos y, ex sen y).
Qual a imagem de f ? Mostre que o Jacobiano de f não é nulo em
nenhum ponto de R2 . Pelo teorema da função inversa, todo ponto
de R2 tem uma vizinhança onde f é biunı́voca. Entretanto f não é
injetora em R2 . Quais são as imagens por f das retas paralelas aos
eixos coordenados?
Exercı́cio 8.2. Para cada uma das funções abaixo determinar: (1)
quais são sobrejetivas; (2) quais são injetivas; (3) o Jacobiano; (4) os
pontos de R2 onde não se aplica o Teorema da Função Inversa.
O Teorema da Função Inversa
141
a) f : R2 → R2 dada por f (x, y) = (ax + by, cx + dy)
p
b) f : ]0, ∞[×R → R2 dada por f (x, y) = ( x2 + y 2 , arc tan y/x);
c) f : R2 → R2 dada por f (x, y) = (xy 2 , x2 y);
d) f : R2 → R2 dada por f (x, y) = (x3 − y, y 3 + x).
Exercı́cio 8.3. Seja f : R3 \ P → R3 , f = (f1 , f2 , f3 ) definida por
fi (x1 , x2 , x3 ) = xi /(1 + x1 + x2 + x3 ), onde
P = {(x1 , x2 , x3 ) | 1 + x1 + x2 + x3 = 0}.
Calcule o Jacobiano Jf (x1 , x2 , x3 ). Mostre que f é injetora e calcule
f −1 .
Exercı́cio 8.4.
Considere as funções
cosh ξ =
eξ + e−ξ
,
2
senh ξ =
eξ − e−ξ
.
2
a) Determine uma solução (x0 , y0 ) para o sistema
(
ex cos y − ex sen y = 1
ex cosh y + ex senh y = 1
b) É possı́vel resolver o sistema
(
ex cos y − ex sen y = 1 + µ
ex cosh y + ex senh y = 1 + ν
para µ e ν pequenos?
Exercı́cio 8.5. Sabendo-se que o polinômio f (x) = x3 −6x2 +11x−6
possui as raı́zes λ1 = 1, λ2 = 2 e λ3 = 3, mostre que existe δ > 0
tal que se |a + 6| < δ, |b − 11| < δ e |c + 6| < δ, então o polinômio
g(x) = x3 + ax2 + bx + c possui três raı́zes reais e distintas λ1 , λ2 e
λ3 .
Exercı́cio 8.6. Seja k k uma norma qualquer de Rn e considere em
V = Mn×n munido da norma induzida, definida por (4.12).
142
Cálculo Avançado I
a) Seja I = X ∈ V ; X é invertı́vel . Mostre que I é aberto e
desconexo em V .
b) Sejam A, B ∈ V . Dizemos que B é raiz quadrada de A se B 2 =
A. Mostre que existe δ > 0 tal que se kA−Ik < δ então A possui
uma raiz quadrada.
c) “Quantas” raı́zes quadradas possui a identidade I ∈ M2×2 ,
I=
1 0
?
0 1
9
O Teorema da Função Implı́cita
Neste capı́tulo vamos estudar outro resultado central da Análise: o
Teorema da Função Implı́cita.
À guisa de motivação, consideremos a equação da circunferência
unitária x2 + y 2 − 1 = 0. É imediato verificar que podemos explicitar
y como função da variável x:
p
p
y = 1 − x2 ou y = − 1 − x2 .
Mais
precisamente, se ϕ:
√
√[−1, 1] → R é a função definida por ϕ(x) =
2
1 − x (ou ϕ(x) = − 1 − x2 ), então ϕ está implı́cita na equação
da circunferência.
De modo análogo, a equação 5x2 + 5y 2 − 6xy − 8 = 0 descreve uma
elipse centrada em (0, 0).
1.6
1.4
1.2
1
y0.8
0.6
0.4
0.2
–1.6
–1.2 –1 –0.8
–0.4
0
–0.2
0.2 0.4 0.6 0.8 1 1.2 1.4 1.6
x
–0.4
–0.6
–0.8
–1
–1.2
–1.4
–1.6
Figura 9.1
144
Cálculo Avançado I
Embora explicitar y em função de x não seja uma tarefa tão imediata, vemos pela figura que existe uma função ϕ: ]a, b[→ R tal que
y = ϕ(x) está implı́cita na equação da elipse.
O mesmo pode ser feito para mais variáveis. Por exemplo, no
sistema
( 2
x + y 2 + z 2 − 10 = 0,
−y 2 + z 2 − 4 = 0,
as variáveis z e y podem ser facilmente expressas como função de x:
r
r
14 − x2
6 − x2
z=
e y=
.
2
2
Mas o que dizer do sistema
( 3
x + x2 y 2 + xyz 2 − 4 = 0,
x2 − xyz + y 2 z 2 − 7 = 0?
Os exemplos acima nos remetem à seguinte questão:
Problema: Dada f : Rk+m → Rm e (x0 , y0 ) ∈ Rk+m tal que
f (x0 , y0 ) = 0, deseja-se saber se existe Ω ⊂ Rk aberto e uma
função ϕ: Ω → Rm satisfazendo
a) x0 ∈ Ω e ϕ(x0 ) = y0 ;
b) f x, ϕ(x) = 0, ∀x ∈ Ω.
Se a resposta for afirmativa, dizemos que ϕ é função implı́cita para
a equação f (x, y) = 0 na vizinhança de x0 .
Observação: No caso particular em que k = m = 1, podemos obter
resposta para a questão acima via Teoria de Equações Diferenciais
Ordinárias. De fato, supondo f e ϕ diferenciáveis, temos pela Regra
da Cadeia
∂f
∂f
+ ϕ′ (x)
= 0.
∂x
∂y
Se f é de classe C 1 e ∂f
∂y (x0 , y0 ) 6= 0, podemos obter ϕ como solução
do problema de valor inicial
dϕ = Φ(x, ϕ)
dx
(9.1)
ϕ(x0 ) = y0
O Teorema da Função Implı́cita
145
onde estamos denotando
Φ(x, y) = −
∂f
(x, y)
∂y
−1
∂f
(x, y).
∂x
As hipóteses que garantem a existência de soluções para as equações
do tipo (9.1) (veja Capı́tulo 11) fornecem respostas para a questão.
A “via” que permite tratar a questão acima de modo simples, é
a que faz uso do Teorema da Função Inversa. Para ilustrar a ideia,
consideremos o seguinte caso particular.
Seja f : Rn → Rm (n = k + m) a função linear definida por f (z) =
Az, onde A é matriz m × n.
Denotando z = (x, y) = (x1 , . . . , xk , y1 , . . . , ym ), podemos escrever
f (x, y) = Az = Bx+Cy, onde B e C são submatrizes respectivamente
de ordem m × k e m × m, isto é, A = [B C] é composta dos blocos
B e C.
Se C é invertı́vel, podemos explicitar y como função de x pois
Bx + Cy = 0 ⇒ y = −C −1 Bx.
Neste caso, se ϕ: Rk → Rm é a função linear definida por ϕ(x) =
−C −1 Bx, então ϕ está implı́cita na equação f (x, y) = 0 na vizinhança
de x0 , qualquer que seja x0 .
Observe que neste caso particular, os blocos B e C são as derivadas
parciais de f . De fato,
∂f
∂f
B=
(x0 , y0 )
(x0 , y0 )
e
C=
∂x
∂y
e
∂f
(x0 , y0 )
ϕ=−
∂y
−1 ∂f
(x0 , y0 )
∂x
(9.2)
A chave para tratar a questão via Teorema da Função Inversa pode
ser observada se reescrevermos a equação f (x, y) = 0 na seguinte
n
forma. Seja F : Rn →
R (n = k + m) a função linear definida por
F (x, y) = x, f (x, y) . Então F (z) = Az, onde A é a matriz
Ik O
,
A=
B C
146
Cálculo Avançado I
onde Ik é a matriz identidade de ordem k × k e O é a matriz nula de
ordem k × m. Sabemos da Álgebra Linear que det A = det C. Assim,
se C é invertı́vel, também é a matriz A, sendo fácil verificar que
Ik
O
−1
.
A =
−C −1 B C −1
Portanto,
F (x, y) = (x, 0) ⇐⇒ (x, y) = F −1 (x, 0) = (x, −C −1 Bx)
e reencontramos a solução (9.2).
O Teorema da função implı́cita
Teorema 9.1: Seja f : Rk × Rm → Rm uma função de classe C 1 .
Suponha f (x0 , y0 ) = 0 e
∂f
det
(x0 , y0 ) 6= 0.
∂y
Então existe δ0 > 0 e ϕ : Bδ0 (x0 ) ⊂ Rk → Rm função de classe C 1
tais que
f x, ϕ(x) = 0, ∀x ∈ Bδ0 (x0 ).
k
m
k
m
Prova: Seja
F : R ×R → R ×R 1 a função definida por F (x, y) =
x, f (x, y) . Então F é de classe C e a matriz Jacobiana de F em
z0 = (x0 , y0 ) é
Ik
O
′
F (z0 ) =
∂f
∂f (z )
)
(z
0
0
∂x
∂y
Como (veja a subseção sobre determinantes de matrizes em bloco no
Apêndice ao final do Capı́tulo 12)
′
∂f
JF (z0 ) = det F (z0 ) = det
(z0 ) 6= 0,
∂y
O Teorema da Função Implı́cita
147
segue do Teorema
da Função Inversa que existe δ1 > 0 tal que V =
F Bδ1 (z0 ) é aberto e F : Bδ1 (z0 ) → V é difeomorfismo de classe C 1 .
É claro que (x0 , 0) ∈ V e é claro também
da definição de F que se
−1
(x, ỹ) ∈ V , então F (x, ỹ) = x, g(x, ỹ) , onde g : V → Bδ1 (z0 ) é de
classe C 1 .
Como V é aberto, seja δ0 > 0 tal que Bδ0 (x0 , 0) ⊂ V e considere
ϕ(x) = g(x, 0), para todo x ∈ Bδ0 (x0 ) ⊂ Rk . Então
x, f (x, ϕ(x)) = F x, ϕ(x) = F x, g(x, 0)
= F F −1 (x, 0) = (x, 0),
de onde se conclui que f x, ϕ(x) = 0 para todo x ∈ Vδ0 (x0 ).
Multiplicadores de Lagrange
Uma das aplicações importantes do Teorema da Função Implı́cita é
o Método dos Multiplicadores de Lagrange para o cálculo de extremos
de funções sujeitas a restrições.
À guisa de motivação, seja f : Rn → R uma função contı́nua e considere o problema de otimização
Problema: Determinar o mı́nimo global de f sobre a bola
fechada B = BR (x0 ), isto é, determinar x ∈ B tal que
f (x) ≤ f (x), ∀x ∈ B
Como B é compacto e f é contı́nua, sabemos que a solução do
problema existe. Se f é diferenciável e x pertence ao interior de B,
então a solução pode ser determinada dentre os pontos crı́ticos de
f . Mas como determinar a solução se x estiver na fronteira da bola?
O resultado a seguir fornece um método, caso f seja suficientemente
regular.
Teorema 9.2: Sejam f, g: Rn → R funções de classe C 1 e S = x ∈
Rn ; g(x) = 0 . Suponha x0 ∈ S tal que
g ′ (x0 ) 6= 0 e f (x0 ) = min f (x) ; x ∈ S .
Então f ′ (x0 ) e g ′ (x0 ) são linearmente dependentes, isto é, existe (multiplicador de Lagrange) λ ∈ R tal que ∇f (x0 ) = λ∇g(x0 ).
148
Cálculo Avançado I
Prova: Se g ′ (x0 ) 6= 0, podemos supor sem perder a generalidade que
∂g
(x0 ) 6= 0. Seja λ ∈ R tal que
∂xn
∂f
∂g
(x0 ) = λ
(x0 ).
∂xn
∂xn
Para concluir a prova, basta mostrar que
∂g
∂f
(x0 ) = λ
(x0 )
∂xi
∂xi
se verifica para i = 1, . . . , n − 1.
Se denotarmos x = (x̃, y) ∈ Rn−1 × R, x0 = (x̃0 , y0 ), então g é de
classe C 1 , g(x̃0 , y0 ) = 0 e
∂g
∂g
(x0 ) =
(x̃0 , y0 ) 6= 0,
∂xn
∂y
segue do Teorema da Função Implı́cita que existe uma vizinhança
aberta Ω ⊂ Rn−1 de x̃0 e uma função ϕ: Ω → R de classe C 1 tais que
ϕ(x̃0 ) = y0 e
g x̃, ϕ(x̃) = 0, ∀x̃ ∈ Ω.
(9.3)
Além disso, como
f x̃0 , ϕ(x̃0 ) ≤ f x̃, ϕ(x̃) , ∀x̃ ∈ Ω,
verificamos que x̃0 ∈ Ωé ponto de mı́nimo para a função diferenciável
x̃ 7→ ψ(x̃) = f x̃, ϕ(x̃) . Portanto, ψ ′ (x̃0 ) = 0 e temos da Regra da
Cadeia,
∂f
∂f
′
[ψ (x̃0 )] =
(9.4)
(x0 ) +
(x0 ) [ϕ′ (x̃0 )] = 0.
∂ x̃
∂y
Derivando a equação (9.3) em relação a x̃, obtemos
∂g
∂g
(x0 ) +
(x0 ) [ϕ′ (x̃0 )] = 0.
∂ x̃
∂y
(9.5)
Multiplicando a equação (9.5) por λ e subtraindo de (9.4), obtemos
a conclusão
∂f
∂g
(x0 ) = λ
(x0 ) .
∂ x̃
∂ x̃
O Teorema da Função Implı́cita
149
Aplicações
Para exemplificar aplicações do Método dos Multiplicadores de Lagrange, retomemos duas desigualdades importantes demonstradas no
Capı́tudo 2: as desigualdades de Hölder e de Young (veja Lema 2.9
e Corolário 2.10).
Desigualdade de Hölder: Sejam p e q tais que 1 < p, q < +∞ e
1/p + 1/q = 1. Então, para todo x, y ∈ Rn , vale a desigualdade
|hx : yi| ≤ kxkp kykq .
Prova: Seja y ∈ Rn , y 6= 0 e consideremos as funções f, g: Rn → R
definidas por
f (x) = hy : xi
e
g(x) = kxkpp − 1.
A função f é de classe C 1 , pois é linear e ∇f (x) = y para todo
x ∈ Rn . A função g é de classe C 1 , pois se p > 1,
∇g(x) = p |x1 |p−2 x1 , . . . , |xn |p−2 xn
é contı́nua em Rn .
Seja S = x ∈ Rn ; g(x) = 0 . O conjunto S é a esfera unitária
para a norma k kp . Como S é compacto, existe x ∈ S ponto de
máximo de f sobre S, isto é, f (x) ≥ f (x), ∀x ∈ S. Além disso,
∇g(x) 6= 0 pois
∇g(x) : x = p
n
X
i=1
|xi |p = pkxkpp = p > 0.
Pelo Teorema 9.2, existe λ ∈ R tal que ∇f (x) = λ∇g(x), isto é,
yi = λp|xi |p−2 xi ,
∀i = 1, . . . , n.
(9.6)
Multiplicando ambos os lados da igualdade em (9.6) por xi e somando
em i, obtemos
f (x) = hy : xi = λpkxkpp = λp.
(9.7)
150
Cálculo Avançado I
É claro que λ > 0, pois se ỹ = y/kykp , então ỹ ∈ S e
λp = hy : xi ≥ hy : ỹi = kyk22 /kykp > 0.
Como q é o conjugado de p, tomando o módulo em ambos os lados
de (9.6) e elevando à potência q, obtemos
|yi |q = (pλ)q |xi |(p−1)q = (pλ)q |xi |p .
Somando em i = 1, . . . , n, obtemos de (9.7),
kykqq = (pλ)q kxkpp = (pλ)q ⇒ f (x) = kykq .
Então, se x̃ ∈ S, então
hy : x̃i = f (x̃) ≤ f (x) = kykq .
(9.8)
Para x ∈ Rn x 6= 0 qualquer, seja x̃ = x/kxkp . Então x̃ ∈ S e a
desigualdade (9.8) nos dá
hy : xi ≤ kykq kxkp .
Para concluir a desigualdade, basta observar que −x ∈ S é ponto de
mı́nimo para f em S.
Desigualdade de Young: Sejam p e q tais que 1 < p, q < +∞ e
1/p + 1/q = 1. Então, para todo x, y ∈ R, vale a desigualdade
|xy| ≤
|y|q
|x|p
+
.
p
q
Prova: Consideremos as funções f, g: Ω+ → R definidas por
f (x, y) =
1 p 1 q
|x| + |y| ,
p
q
e
g(x, y) = xy − 1,
onde Ω+ = (x, y) ∈ R2 ; x > 0, y > 0 . A função f é de classe C 1
pois p, q > 1 e ∇f (x, y) = |x|p−2 x, |y|q−2y para todo (x, y) ∈ R2 .
A função g é de classe C 1 pois é polinômio e ∇g(x, y) = (y, x), para
todo (x, y) ∈ R2 .
O Teorema da Função Implı́cita
151
Seja S = (x, y) ∈ R2 ; g(x, y) = 0 . O conjunto S não é compacto,
pois não é limitado. Entretanto é fechado e como f é coerciva (veja
(4.10)), existe (x, y) ponto de mı́nimo de f sobre S, isto é, f (x, y) ≤
f (x, y), ∀(x, y) ∈ S.
Além disso, ∇g(x, y) = (y, x) 6= (0, 0).
é,
Pelo Teorema 9.2, existe λ ∈ R tal que ∇f (x, y) = λ∇g(x, y), isto
(
|x|p−2 x = λy,
|y|q−2 y = λx,
de onde concluı́mos que x = y = 1. Logo, f (x, y) ≥ 1 para todo
(x, y) ∈ S.
Seja (x, y) ∈ R2 , (x, y) =
6 (0, 0) e defina x̃ = x/|xy|1/p e ỹ =
y/|xy|1/q . Então (x̃, ỹ) ∈ S e
1 p 1 q
|x̃| + |ỹ| ≥ 1,
p
q
de onde segue a desigualdade
1 p 1 q
|x| + |y| ≥ xy.
p
q
Para concluir, basta repetir o argumento para as funções f e g acima
definidas em
Ω− = (x, y) ∈ R2 ; x < 0, y < 0 .
Multiplicadores de Lagrange (bis)
Vimos nas seções anteriores o Método dos Multiplicadores de Lagrange para o caso de uma restrição, isto é, g(x) = 0, com g: Rn → R
função de classe C 1 . Vamos tratar nesta seção o caso geral, com m
restrições.
Teorema 9.3: Seja f : Rn → R uma função diferenciável
e g: Rn →
m
1
n
R , m < n, uma função de classe C . Seja S = x ∈ R ; g(x) = 0
152
Cálculo Avançado I
e x0 ∈ S tal que f (x0 ) = min f (x) ; x ∈ S . Se o posto de g ′ (x0 )
é m, então existe λ = (λ1 , . . . , λm ) ∈ Rm tal que
∇f (x0 ) =
m
X
i=1
λi ∇gi (x0 ).
(9.9)
Observação: A equação (9.9) pode ser interpretada como um sistema linear de n equações e m incógnitas, com n > m. De fato,
podemos escrever (9.9) na forma
∂g1
∂x1 (x0 ) · · ·
..
..
.
∂g1 .
(x0 ) · · ·
∂xn
∂gm
∂f1
(x0 ) λ
(x0 )
1
∂x1
∂x1
.
..
..
. =
.
.
.
∂f
∂gm
1
λm
(x0 )
(x0 )
∂xn
∂xn
(9.10)
T
Ou de modo mais conciso, Hλ = F , onde H = g ′ (x0 ) e F =
′
T
f (x0 ) .
Para provar o teorema, devemos mostrar que o sistema (9.10) possui
uma solução λ.
x = (y, z) ∈ Rk ×Rm , ondek = n−m.
Prova: Se x ∈ Rn ,escrevemos
′
Como o posto de g (x0 ) é igual a m, a matriz g ′ (x0 ) possui m
colunas linearmente independentes, que podemos supor sem perder a
generalidade, serem as últimas m colunas. Assim,
′
∂g
∂g
g (x0 ) =
(x0 )
(x0 ) ,
∂y
∂z
∂g
onde a submatriz
(x0 ) é invertı́vel.
∂z
Como g é de classe C 1 e g(y0 , z0 ) = 0, segue do Teorema da Função
Implı́cita que existe U ⊂ Rk vizinhança aberta de y0 e ϕ: U → Rm
de classe C 1 tal que ϕ(y0 ) = z0 e
g y, ϕ(y) = 0, ∀y ∈ U.
(9.11)
O Teorema da Função Implı́cita
153
Em particular, y0 ∈ U é ponto de mı́nimo para a função
y 7→ f y, ϕ(y) , y ∈ U.
Portanto, segue da regra da cadeia
∂f
∂f
(x0 ) +
(x0 )ϕ′ (y0 ) = 0
∂y
∂z
∂g
∂g
(x0 ) +
(x0 )ϕ′ (y0 ) = 0
∂y
∂z
(9.12)
(9.13)
Para simplificar a notação, consideremos
T
∂f
F1 =
(x0 ) ,
∂y
T
∂g
B=
(x0 ) ,
∂y
T
∂f
F2 =
(x0 ) ,
∂z
T
∂g
C=
(x0 ) ,
∂z
T
Φ = [ϕ′ (y0 )] .
Então, tomando a transposta nas equações (9.13), temos
(
ΦF2 = −F1
ΦC = −B
(9.14)
Como C é invertı́vel, seja λ ∈ Rm solução de Cλ = F2 . Então, segue
de (9.14) que
−Bλ = ΦCλ = ΦF2 = −F1 .
Portanto, Hλ = F e concluı́mos a prova.
Exercı́cios
Exercı́cio 9.1. Considere a superfı́cie xy − z log y + eyz − e = 0.
É possı́vel representá-la na forma z = f (x, y) nas proximidades do
ponto (0, 1, 1)?
Exercı́cio 9.2. O ponto P = (1, −1, 2) pertence às superfı́cies x2 (y 2 +
z 2 ) = 5 e (x − z)2 + y 2 = 2. Mostre que a curva interseção dessas
154
Cálculo Avançado I
superfı́cies pode ser parametrizada na forma z = f (x) e y = g(x)
numa vizinhança de P .
Exercı́cio 9.3. Seja f : R → R função de classe C 1 tal que f (1) = 1
e defina
S = (x, y) ∈ R2 ; 2f (xy) = f (x)2 + f (y) .
a) Mostre que se f ′ (1) 6= 0, existe r > 0 tal que S ∩ Br (1, 1) é
gráfico de uma função y = ϕ(x) de classe C 1 .
b) Nas condições do item (a), se f é de classe C 2 , mostre que x = 1
é ponto de máximo ou mı́nimo local para ϕ (o que implica, em
particular, que S não é gráfico de nenhuma função x = ψ(y) na
vizinhança de (1, 1)).
c) Mostre que se S é gráfico de uma função x = ψ(y) em alguma
vizinhança de (1, 1), então f ′ (1) = 0.
Exercı́cio 9.4. Seja f : R2 → R tal que f (0, 0) = 0. Encontre
uma
condição para f que permita resolver a equação f f (x, y), y = 0 com
y função de x numa vizinhança de (0, 0).
Exercı́cio 9.5. Mostre que o sistema abaixo pode ser resolvido com:
1) x, y, u em função de z;
2) x, z, u em função de y;
3) y, z, u em função de x;
mas não é possı́vel exprimir x, y, z em
3x + y − z
x − y + 2z
2x + 2y − 3z
função de u.
+ u2
+ u
+ 2u
= 0
= 0
= 0
Exercı́cio 9.6. Seja f : Rn ×Rn → Rn uma função de classe C 1 tal que
f (0, 0) = 0. Sejam B e C respectivamente as matrizes (relativamente
à base canônica)
∂f
∂f
(0, 0)
e
(0, 0)
∂x
∂y
a) B e C são matrizes de que ordem?
O Teorema da Função Implı́cita
155
b) Escreva [f ′ (0, 0)] em termos dos blocos B e C.
c) Seja φ: Rn × Rn → Rn definida por φ(x, y) = f f (x, y), f (x, y) .
Calcule
∂φ
∂φ
(0, 0) ,
(0, 0)
e
[φ′ (0, 0)]
∂x
∂y
em termos de B e C.
d) Se B é invertı́vel e kCk < 1/kB −1 k, mostre que a equação
φ(x, y) = 0 pode ser resolvida com x em função de y numa
vizinhança de 0 ∈ Rn .
Exercı́cio 9.7. Seja f : R → R contı́nua tal que f (x) > 0 se x > 0,
satisfazendo
Z 1
f (t) dt = 2.
0
Mostre que existe δ > 0 e uma única função ϕ: [0, δ] → R de classe
C 1 em ]0, δ[ tal que
Z ϕ(x)
f (t) dt = 1.
x
′
Determine ϕ (x).
Exercı́cio 9.8. Considere ai , i = 1, . . . , n, números reais distintos e
o polinômio de grau n ı́mpar,
p(x) =
n
Y
i=1
(x − ai ).
Defina
A = b ∈ R ; p(x) = b possui n raı́zes distintas .
(a) Mostre que 0 ∈ A.
(b) Mostre que A é limitado.
(c) Use o Teorema da Função Implı́cita para mostrar que A é aberto.
Exercı́cio 9.9. Calcular o valor máximo de
f (x1 , . . . , xn ) = (x1 x2 · · · xn )2
156
Cálculo Avançado I
sob a restrição x21 + x22 + · · · + x2n = 1. Utilizar o resultado para
calcular a seguinte desigualdade, válida para números reais positivos
a1 , . . . , an :
a1 + · · · + an
(a1 a2 · · · an )1/n ≤
n
Exercı́cio 9.10. Seja f : Rn → R definida por
f (x1 , . . . , xn ) = x21 x22 · · · x2n .
Sejam p1 , p2 , . . . , pn números reais estritamente positivos e defina
n
X
n
G= x∈R ;
pi x2i = 1 .
i=1
a) Mostre que existe x ∈ G tal que f (x) = max f (x) ; x ∈ G ;
b) Calcule x.
Exercı́cio 9.11. Seja k kL(Rn , Rm ) a norma induzida pelas normas
m
euclidianas k k2 de Rn e R
√ (veja (4.12)). Se A é matriz m × n,
mostre que kAkL(Rn , Rm ) = λ, onde λ é o maior autovalor da matriz
simétrica e positiva definida AT A.
2 1
Use o resultado para concluir que se A =
, então
0 1
q
√
kAkL(R2 , R2 ) = 3 + 5.
Exercı́cio 9.12. Seja A uma matriz simétrica n × n. Para todo
α ∈ R, seja Aα = A + αI, sendo I a matriz unitária. Considere
λ1 (α) ≤ λ2 (α) ≤ · · · ≤ λn (α) os autovalores de Aα .
(a) Mostre que
λ1 (α) = min hAα x : xi ; kxk22 = 1 ,
onde h : i denota o produto escalar usual de Rn .
(b) Supondo x1 , x2 , . . . , xk , ( 1 < k ≤ n ) os autovetores correspondentes aos primeiros k autovalores, mostre que
λk (α) = min hAα x : xi ; kxk22 = 1, e hx : x1 i = 0,
hx : x2 i = 0, . . . , hx : xk−1 i = 0 ,
(c) Mostre que as aplicações α 7→ λi (α), i = 1, . . . , n são funções
côncavas definidas em R (Sug.: Veja o Exercı́cio 4.31).
10
Sequências de Funções
Seja A um subconjunto de Rn e consideremos F (A, Rm) a coleção de
todas as funções definidas em A com valores em Rm , isto é,
F (A, Rm ) = f : A → Rm ; f é função .
Seja {fk }k uma sequência de funções de F (A, Rm ) e x0 ∈ A. Dizemos que {fk } converge pontualmente em x0 se {fk (x0 )} é sequência
convergente de Rm . Dizemos que {fk } converge pontualmente em A
se para todo x ∈ A a sequência {fk (x)} é convergente em Rm .
É claro que se {fk } é pontualmente convergente em A, a unicidade
do limite nos permite definir a função limite f ∈ F (A, Rm). Isto é,
f (x) = limk→∞ fk (x).
As considerações acima nos levam naturalmente à
Definição 10.1: Dizemos que uma sequência {fk } de F (A, Rm ) converge pontualmente para f em A se
∀x ∈ A,
f (x) = lim fk (x),
k→∞
isto é, ∀x ∈ A e ∀ε > 0, ∃k0 ∈ N (que pode depender de ε e x) tal
que se k ≥ k0 então kfk (x) − f (x)k < ε.
Notação: Se {fk } converge pontualmente para f em A denotamos
p
fk −→ f em A.
158
Cálculo Avançado I
A convergência pontual tem um “defeito”; pode não transferir para
a função limite as “boas” propriedades das funções fk . De fato, propriedades tais como continuidade, semicontinuidade, integrabilidade,
etc., podem não ser herdadas pela função limite pontual, como veremos a seguir.
Exemplo 1: (Perda de Continuidade)
Consideremos a sequência de F (R, R) definida por
(0
se x ≤ 0
fk (x) =
kx se x ∈ [0, 1/k]
1
se x ≥ 1/k
É imediato verificar que fk é contı́nua para todo k ∈ N e que fk
converge pontualmente em R para a função de Heaviside
n
0 se x ≤ 0
f (x) =
1 se x > 0
que é descontı́nua em x = 0.
Exemplo 2: (Perda de Integrabilidade)
Consideremos a sequência de F [0, 1], R definida por
fk (x) = lim (cos k!πx)2j .
j→∞
Não é difı́cil mostrar (veja Exercı́cios) que fk (x) = 0, exceto para um
número finito de pontos de [0, 1] e que fk converge pontualmente em
[0, 1] para a função de Dirichlet
n
0 se x é irracional
f (x) =
1 se x é racional
Portanto, fk é função Riemann-integrável em [0, 1] para todo k ∈ N,
mas a função limite f não é Riemann-integrável.
Mesmo que a função limite pontual seja integrável, pode não ocorrer a conservação no valor limite das integrais. De fato, considere a
sequência {fk } de F ([0, +∞); R) definida por fk (x) = kx2 e−x/k . É
fácil ver que fk converge pontualmente para a função f ≡ 0 e que
Z +∞
fk (x) dx = 1, ∀k ∈ N.
0
Sequências de Funções
159
Convergência uniforme
Definição 10.2: Dizemos que uma sequência {fk } de F (A, Rm ) converge uniformemente para f ∈ F (A, Rm ) em A se
∀ε > 0, ∃k0 ∈ N tal que se k ≥ k0
então kfk (x) − f (x)k < ε, ∀x ∈ A.
Notação: Se {fk } converge uniformemente para f em A denotamos
u
fk −→
f em A.
Vale observar que a convergência uniforme implica na convergência
pontual, mas não a recı́proca; o k0 da convergência uniforme só depende de ε, enquanto o da convergência pontual depende do ε e de
cada x.
Exemplos: A sequência {fk } de F [−1, 1], R definida por fk (x) =
p
x2 + 1/k converge uniformemente em [−1, 1] para f (x) = |x|. A
sequência {fk } definida por fk (x) = xk converge pontualmente (mas
não uniformemente) em [0, 1] para a função
n
f (x) = 0 se x ∈ [0, 1[
1 se x = 1
p
Proposição 10.3: Suponhamos fk −→ f em A e seja
Mk = sup kfk (x) − f (x)k ; x ∈ A .
u
Então fk −→
f em A se e somente se Mk −→ 0.
Prova: Provemos inicialmente a implicação ⇒. Dado ε > 0, existe
k0 ∈ N tal que se k ≥ k0 , então kfk (x) − f (x)k < ε/2, para todo
x ∈ A. Portanto, passando ao sup em x, Mk ≤ ε/2 se k ≥ k0 .
A recı́proca é imediata, pois kfk (x)−f (x)k ≤ Mk para todo x ∈ A.
Definição 10.4: Uma sequência de F (A, Rm ) é denominada uniformemente de Cauchy se
∀ε > 0, ∃k0 ∈ N tal que se k, l ≥ k0
então kfk (x) − fl (x)k < ε, ∀x ∈ A.
160
Cálculo Avançado I
O Teorema a seguir, denominado Critério Uniforme de Cauchy,
caracteriza as sequências que convergem uniformemente.
u
Teorema 10.5: fk −→
f em A se e somente se {fk }k é uniformemente de Cauchy em A.
Prova: A implicação ⇒ é consequência imediata da desigualdade
triangular,
kfk (x) − fl (x)k ≤ kfk (x) − f (x)k + kfl (x) − f (x)k.
Provemos a implicação contrária (⇐).
Se {fk } é uniformemente de Cauchy em A, então para cada x ∈ A, a
sequência {fk (x)} é sequência de Cauchy em Rm . Como consequência
do Teorema 3.28 existe o limite f (x) = limk→∞ fk (x) e concluı́mos
p
que fk −→ f em A.
u
Para provar que fk −→
f em A, seja ε > 0. Então existe k0 ∈ N
tal que
k, l ≥ k0 ⇒ kfk (x) − fl (x)k < ε/2, ∀x ∈ A.
(10.1)
Fixando k e passando ao limite para l → ∞ em (10.1), obtemos
k ≥ k0 ⇒ kfk (x) − f (x)k ≤ ε/2,
∀x ∈ A.
Segue a conclusão.
A convergência uniforme preserva as “boas” propriedades. De fato,
Teorema 10.6: Seja x0 ∈ A ∩ A′ e {fk } sequência de função contı́u
nuas em x0 . Se fk −→
f em A, então f é contı́nua em x0 .
Prova: Seja x ∈ A. Então
kf (x) − f (x0 )k ≤ kf (x) − fk (x)k + kfk (x) − fk (x0 )k
+ kfk (x0 ) − f (x0 )k,
∀k.
(10.2)
Dado ε > 0, existe k0 ∈ N tal que se k ≥ k0 , kfk (x) − f (x)k < ε/3,
∀x ∈ A. Portanto, fixando k = k0 em (10.2), temos
kf (x) − f (x0 )k <
2ε
+ kfk0 (x) − fk0 (x0 )k.
3
Sequências de Funções
161
Como fk0 é função contı́nua, existe δ > 0 tal que se kx − x0 k < δ,
então kfk0 (x) − fk0 (x0 )k < ε/3 e temos a conclusão.
Observação: O Teorema 10.6 pode ser interpretado como uma comutatividade de limites:
f (x0 ) = lim fk (x0 ) = lim lim fk (x),
k→∞
k→∞ x→x0
f (x0 ) = lim f (x) = lim lim fk (x).
x→x0
x→x0 k→∞
De fato, a convergência uniforme preserva essa comutatividade, como
vemos no resultado a seguir.
Teorema 10.7: Seja {fk } uma sequência de F (A, Rm ) e x0 ∈ A′ .
u
Se fk −→
f em A e limx→x0 fk (x) = µk , então
lim f (x) = lim µk = µ.
x→x0
k→∞
u
f em A, então {fk } é uniformemente de Cauchy.
Prova: Se fk −→
Assim, dado ε > 0, existe k0 ∈ N tal que
k, l ≥ k0
⇒
kfk (x) − fl (x)k < ε,
∀x ∈ A.
(10.3)
Para k e l fixados, podemos passar ao limite com x → x0 em (10.3)
para obter
k, l ≥ k0 ⇒ kµk − µl k ≤ ε.
Portanto, a sequência {µk } é sequência de Cauchy em Rm e existe o
limite µ = limk→+∞ µk .
Por outro lado, temos da desigualdade triangular,
kf (x) − µk ≤ kf (x) − fk (x)k + kfk (x) − µk k + kµk − µk, ∀k ∈ N.
(10.4)
A primeira e a terceira parcelas do lado direito de (10.4) podem
ser tornadas tão pequenas quanto se queira se k é grande. Mais
precisamente, existe k1 ∈ N tal que
kµk1 − µk < ε/3
e
kf (x) − fk1 (x)k < ε/3,
∀x ∈ A.
162
Cálculo Avançado I
Além disso, como limx→x0 fk1 (x) = µk1 , existe δ > 0 tal que se
0 < kx − x0 k < δ, então kfk1 (x) − µk1 k < ε/3 e concluı́mos a prova.
Teorema 10.8: Seja {fk }k uma sequência de funções de F [a, b]; R
u
f
tal que cada fk é função Riemann-integrável em [a, b]. Se fk −→
em [a, b], então f é integrável em [a, b] e
lim
k→∞
Z
b
fk (x) dx =
a
Z
b
f (x) dx.
a
Prova: Seja P = a = x0 < x1 < · · · < xm = b uma partição de
[a, b] e consideremos
Mik = sup fk (x) ; x ∈ [xi−1 , xi ] , Mi = sup f (x) ; x ∈ [xi−1 , xi ] ,
mki = inf fk (x) ; x ∈ [xi−1 , xi ] , mi = inf f (x) ; x ∈ [xi−1 , xi ] .
Consideremos também
U (fk , P ) =
m
X
Mik ∆xi
e
L(fk , P ) =
i=1
m
X
mki ∆xi ,
i=1
onde ∆xi = xi − xi−1 .
u
f em [a, b], segue que Mik → Mi e mki → mi quando
Como fk −→
k → ∞, para todo i = 1, . . . , m. Assim, para ε > 0 dado, existe
k0 ∈ N tal que se k ≥ k0 ,
|Mik − Mi | <
ε
ε
e |mki − mi | <
,
4(b − a)
4(b − a)
∀i = 1, . . . , m.
Portanto,
ε
ε
< U (fk , P ) − U (f, P ) < ,
4
4
ε
ε
− < −L(fk , P ) + L(f, P ) < .
4
4
−
Somando as desigualdades acima obtemos
−
ε
ε
< U (fk , P ) − L(fk , P ) − U (f, P ) + L(f, P ) < ,
2
2
(10.5)
Sequências de Funções
163
qualquer que seja k ≥ k0 e P partição de [a, b]. Fixemos k = k0 .
Como fk0 é Riemann-intergrável, existe uma partição P0 tal que
P (fk0 , P ) − L(fk0 , P ) < ε/2,
∀P ⊃ P0 .
Então, segue de (10.5)
0 ≤ U (f, P ) − L(f, P ) <
ε
+ P (fk0 , P ) − L(fk0 , P ) < ε,
2
∀P ⊃ P0 ,
com o que concluı́mos a prova.
Convergência uniforme e derivadas
Teorema 10.9: Seja {fk } uma sequência de funções de F [a, b], R
u
g em
tais que fk é contı́nua em [a, b], derivável em ]a, b[ e fk′ −→
]a, b[. Se para algum x0 ∈ [a, b] a sequência {fk (x0 )}k é convergente,
u
então existe f : [a, b] → R função derivável em ]a, b[ tal que fk −→
f
em [a, b] e f ′ = g.
Prova: Seja ϕ(x) = fk (x) − fl (x), x ∈ [a, b]. Então, pelo Teorema
do Valor Médio, ϕ(x) − ϕ(y) = ϕ′ (ξ)(x − y), para algum ξ entre x e
y. Portanto, para y = x0 ,
fk (x) − fl (x) − fk (x0 ) + fl (x0 ) = fk′ (ξ) − fl′ (ξ) (x − x0 ).
(10.6)
Por hipótese, a sequência {fk′ } é uniformemente de Cauchy em ]a, b[.
Logo, dado ε > 0, existe k0 ∈ N tal que
k, l ≥ k0 ⇒ |fk′ (ξ) − fl′ (ξ)| <
ε
, ∀ξ ∈ ]a, b[.
2(b − a)
Usando a desigualdade triangular em (10.6) obtemos
|fk (x) − fl (x)| ≤
ε
|x − x0 | + |fk (x0 ) − fl (x0 )|, ∀x ∈ [a, b]
2(b − a)
e concluı́mos que {fk } é uniformemente de Cauchy em [a, b]. Pelo
u
Teorema 10.5, existe f : [a, b] → R tal que fk −→
f em [a, b].
164
Cálculo Avançado I
Provemos que f é derivável em ]a, b[. Para x ∈ ]a, b[ fixado, considere Φk : [a, b] → R definida por
fk (t) − fk (x) se t 6= x
t−x
Φk (t) =
fk′ (x)
se t = x
Como fk é derivável, vemos que limt→x Φk (t) = fk′ (x). Por outro
lado, é fácil ver que Φk converge pontualmente em [a, b] \ {x} para a
função
f (t) − f (x)
Φ(t) =
, t ∈ [a, b] \ {x}.
t−x
u
Se provarmos que Φk −→
Φ em [a, b] \ {x}, podemos usar o Teorema
10.7 para concluir a demonstração.
Com efeito, pelo Teorema do Valor Médio,
Φk (t) − Φl (t) =
fk (t) − fk (x) fl (t) − fl (x)
−
= fk′ (ξ) − fl′ (ξ)
t−x
t−x
para algum ξ entre t e x. Como {fk′ } é uniformemente de Cauchy, o
mesmo vale para {Φk }.
O Teorema acima pode ser estendido às funções vetoriais, mas neste
caso precisamos fazer hipóteses adicionais sobre o conjunto Ω. Por
exemplo, um conjunto Ω é estrelado se existe x ∈ Ω satisfazendo a
seguinte propriedade: para todo x ∈ Ω,
sx + (1 − s)x ; s ∈ [0, 1] ⊂ Ω.
(10.7)
Teorema 10.10: Sejam Ω aberto e conexo de Rn e {fk } uma sequência de F (Ω, R) tal que
a) para algum x0 ∈ Ω, a sequência {fk (x0 )} é convergente;
b) para todo k ∈ N, fk é função de classe C 1 ;
u
c) fk′ −→
g em Ω.
Então existe f ∈ F (Ω, R) função de classe C 1 tal que f ′ = g e
p
fk −→ f em Ω. Além disso, se Ω é limitado e é uma união finita de
u
conjuntos estrelados, então fk −→
f em Ω.
Sequências de Funções
165
Prova: Faremos a prova em três etapas.
Etapa 1: g é um campo conservativo.
Sejam γ1 , γ2 : [0, 1] → Ω duas curvas de classe C 1 ligando x a y. Se
denotarmos por Ii , i = 1, 2, as integrais de linha
Z 1
Ii =
g γi (t) : γi′ (t) dt,
0
então podemos escrever
Z 1
Z
′
′
Ii =
g γi (t) − fk γi (t) : γi (t) dt +
0
0
1
fk′ γi (t) : γi′ (t) dt.
Pelo Teorema 6.8, fk′ é campo conservativo. Logo,
I1 − I2 =
−
Z
Z
1
0
1
0
g γ1 (t) − fk′ γ1 (t) : γ1′ (t) dt
g γ2 (t) − fk′ γ2 (t) : γ2′ (t) dt.
Seja Mk = sup{kfk′ (x) − g(x)k ; x ∈ Ω}. Então,
|I1 − I2 | ≤ Mk med(γ1 ) + med(γ2 ) .
u
g em Ω. Portanto, I1 = I2 e concluı́mos que g é
Mk → 0 pois fk′ −→
conservativo.
Seja y0 o limite da sequência {fk (x0 )}k . Pelo Teorema 6.9, existe
uma única f de classe C 1 tal que f ′ (x) = g(x) para todo x ∈ Ω
satisfazendo f (x0 ) = y0 .
p
Etapa 2: fk −→ f em Ω.
Para cada x ∈ Ω, podemos determinar γx : [0, 1] → Ω curva de classe
C ligando x0 a x, de modo que
Z 1
fk′ (γx (t)) : γx′ (t) dt,
fk (x) = fk (x0 ) +
1
Z
f (x) = f (x0 ) +
0
1
0
g(γx (t)) : γx′ (t) dt.
166
Cálculo Avançado I
Logo,
|fk (x) − f (x)| ≤ |fk (x0 ) − f (x0 )| +
Z 1
+
kfk′ γx (t) − g γx (t)) kkγx′ (t)k dt ≤ Mk med(γx ).
0
Como Mk → 0, concluı́mos que fk converge pontualmente para f em
Ω.
Etapa 3: Suponhamos Ω = Ω1 ∪ · · · ∪ Ωp , p ∈ N, onde Ωi , 1 ≤ i ≤ p,
é estrelado.
Seja Φk = fk − f e x ∈ Ω. Por hipótese, existe xi ∈ Ωi tal que
{sx + (1 − s)xi ; s ∈ [0, 1]} ⊂ Ωi . Pelo Teorema do Valor Médio,
Φk (x) − Φk (xi ) = Φ′k (ξ) : x − xi , ),
ξ ∈ Ωi
de modo que
|fk (x) − f (x)| ≤ |fk (xi ) − f (xi )| + kfk′ (ξ) − g(ξ)kkx − xi k.
Como Ω é limitado, existe R > 0 tal que kx − xi k ≤ R para todo
x ∈ Ω e para todo i = 1, . . . , p. Consequentemente,
sup |fk′ (x) − g(x)| ≤ max |fk (xi ) − f (xi )| + Mk R.
x∈Ω
1≤i≤p
(10.8)
Dado ε > 0, existe k0 ∈ N tal que Mk < ε/2R para todo k ≥ k0 .
Pela Etapa 2, existe ki ∈ N tal que se k ≥ ki tem-se
|fk (xi ) − f (xi )| <
ε
.
2
Então, se k ≥ max{k0 , k1 , . . . , kp }, segue de (10.8) a conclusão da
prova.
Sequências de Funções
167
Séries de funções e convergência uniforme
Dada uma sequência de funções {fk } de F (A, Rm ), podemos considerar a sequência das somas parciais
Φk (x) =
k
X
fi (x).
i=1
A sequência {Φk } é denominada série de funções de termo geral fk ,
que denotamos por
∞
X
fi .
(10.9)
i=1
Dizemos que a série (10.9) converge uniformemente em A se a sequência das somas parciais que a define converge uniformemente em
A.
O Critério de Cauchy aplicado à sequência das somas parciais nos
dá:
P∞
Corolário 10.11: A série i=1 fi converge uniformemente em A se
e somente se ∀ε > 0 existe k0 ∈ N tal que se k, l ≥ k0 então
l
X
fi (x) < ε,
i=k+1
∀x ∈ A.
Um resultado importante para o estudo da convergência uniforme
de séries de funções é o Teste de Weierstrass, cuja prova é consequência imediata do critério de Cauchy.
Teorema 10.12: Seja {fk } uma sequência de funções de F (A, Rm )
tais que
kfk (x)k ≤ Mk , ∀x ∈ A.
Se a série numérica
P
i Mi
verge uniformemente em A.
é convergente, então a série
k
X
i=1
fk con-
168
Cálculo Avançado I
• O Teorema de Extensão de Tietze
Como aplicação do Teorema 10.12, vamos demonstrar o Teorema de
Tietze, que permite vários desdobramentos importantes na Topologia
Geral.
Teorema 10.13: Sejam F ⊂ Rn fechado, I intervalo de R e f :
F → I função contı́nua. Então f pode ser estendida ao Rn por uma
função contı́nua. Mais precisamente, existe fe : Rn → I contı́nua tal
que fe(x) = f (x), para todo x ∈ F
Prova: Vamos dividir a demonstração em três etapas: (1) f limitada
e atinge os extremos máximo e mı́nimo; (2) f é limitada mas não
necessariamente atinge máximo ou mı́nimo e (3) f não é limitada.
Etapa 1: Suponhamos I = [a, b], a < b (observe que se f é constante,
o resultado é trivial) com os extremos deste intervalo atingidos por
f , isto é, suponhamos que existem x e x em F tais que f (x) = a e
2
f (x) = b. Seja ϕ : [a, b] → [−1, 1] definida por ϕ(s) = −1 + b−a
(s −a)
e considere g0 = ϕ ◦ f . Então, g0 : F → [−1, 1] é contı́nua e atinge
os extremos de [−1, 1].
Considere os conjuntos
F0+ = x ∈ F ; g0 (x) ≥ 1/3 , F0− = x ∈ F ; g0 (x) ≤ −1/3 .
Como g0 (x) = −1 e g0 (x) = 1, os conjuntos F0+ e F0− são não vazios,
fechados, disjuntos e contidos em F . Logo, existe uma função h0 :
Rn → [−1/3, 1/3] contı́nua (veja Exercı́cio 4.10) satisfazendo
−1/3 se x ∈ F0−
h0 (x) =
.
+1/3 se x ∈ F0+
Seja g1 : F → [−2/3, 2/3] definida por g1 = g0 − h0 . É claro que
g1 é contı́nua e atinge os extremos do intervalo [−2/3, 2/3] respectivamente em x e x. Podemos então repetir o argumento anterior,
considerando os conjuntos
F1+ = x ∈ F ; g1 (x) ≥ 2/9 , F1− = x ∈ F ; g0 (x) ≤ −2/9
e uma função contı́nua h1 : Rn → [−2/9, 2/9] satisfazendo
−2/9 se x ∈ F1−
h1 (x) =
.
+2/9 se x ∈ F1+
Sequências de Funções
169
E assim, sucessivamente, construı́mos as sequências de funções contı́nuas {hk }k e {gk }k definidas respectivamente em Rn e F , satisfazendo as seguintes propriedades:
gk+1 (x) = gk (x) − hk (x), ∀x ∈ F,
k
k
1 2
1 2
hk (x) = −
e hk (x) =
3 3
3 3
k
1 2
|hk (x)| ≤
, ∀x ∈ Rn ,
3 3
k
2
, ∀x ∈ F.
|gk+1 (x)| ≤
3
(10.10)
Da terceira e quarta linhas de (10.10) e do Teorema 10.12, concluı́mos
que:
(1) a sequência {Hk }k , com Hk (x) = h0 (x) + · · · hk (x), e converge
uniformemente em Rn para
n
H : R → [−1, 1],
H(x) =
∞
X
hj (x);
j=0
(2) a sequência {gk } converge uniformemente para zero em F .
Além disso, como para todo x ∈ F ,
gk+1 (x) = gk (x) − hk (x) = g0 (x) − Hk (x),
concluı́mos que Hk converge uniformemente para g0 em F .
Assim, fe : Rn → [a, b] a função definida por fe = ϕ−1 ◦ H é uma
extensão contı́nua de f .
Etapa 2: Suponhamos I = [a, b) com o extremo inferior a sendo
atingido por f e o extremo b não atingido, mais precisamente, suponhamos x ∈ F tal que f (x) = a, f (x) < b para todo x ∈ F , sendo
b = sup f (F ). Neste caso, o argumento do item anterior se aplica
e obtemos uma função H : Rn → [−1, 1] contı́nua tal que ϕ−1 ◦ g0
coincide com f para todo x ∈ F . Se H(x) < 1 para todo x ∈ Rn ,
170
Cálculo Avançado I
teremos concluı́do a prova, tomando fe = ϕ−1 ◦ H. Caso contrário,
consideremos o conjunto
F0 = x ∈ Rn ; H(x) = 1 ,
que é fechado e não intercepta F . Assim, (veja Proposição 4.13))
existe ψ : Rn → [0, 1] contı́nua tal que |ψ(x)| ≤ 1, ∀x ∈ F , ψ(x) = 1
se x ∈ F e ψ(x) = 0 se x ∈ F0 . Neste caso, a função
fe(x) = ψ(x)(ϕ−1 ◦ H)(x)
satisfaz as condições desejadas.
Mutatis mutandis, temos a mesma conclusão no caso f : F → (a, b].
Etapa 3: Se f não é limitada, consideremos a aplicação ϕ : R →
(−1, 1), ϕ(s) = π2 arctan(s). Então, ϕ ◦ f satisfaz as condições da
Etapa 2 e a prova está concluı́da.
Séries de potências
As séries de potências são casos particulares de séries de funções
e desempenham papel preponderante na Matemática. Denominamos
P∞
série de potências em torno de x0 ∈ R as séries de funções k=1 fk (x),
onde fk (x) = ak (x − x0 )k .
Como as funções fk (x) são polinômios e estão portanto definidas
para todo x ∈ R, podemos perguntar para que valores de x a série
converge pontualmente e/ou uniformemente.
Para o estudo da convergência pontual podemos usar os testes para
séries numéricas. De fato, para x fixado, o teste da raı́z dá:
p
lim sup k |ak ||x − x0 | < 1 ⇒
a série converge;
k→∞
p
lim sup k |ak ||x − x0 | > 1 ⇒
a série diverge.
k→∞
Portanto, se denotarmos por
R = 1/ lim sup
k→∞
p
k
|ak |,
(10.11)
Sequências de Funções
171
então a série converge pontualmente (e absolutamente) no intervalo
(x0 − R, x0 + R) (com a convenção R = +∞ se 1/R = 0) e diverge
em (−∞, x0 − R) ∪ (x0 + R, +∞). O número R é denominado Raio
de Convergência da série. Observe que o teste da raı́z nada informa
sobre o que ocorre nas extremidades do intervalo.
No que se refere ao estudo da convergência uniforme, podemos
aplicar o Teste de Weierstrass.
P∞
Teorema 10.14: Seja k=1 ak (x − x0 )k uma série de potências em
torno de x0 e A um conjunto limitado qualquer tal que A esteja
contido em (x0 − R, x0 + R), onde R é definido por (10.11). Então a
série converge uniformemente em A.
Prova: Seja α = sup{|x − x0 | ; x ∈ A}. Então 0 < α < +∞ e
|fk (x)| ≤ |ak |αk ,
Como α < R,
lim sup
p
k
k→∞
P∞
k
k=1 ak α
∀x ∈ A.
|ak |α < 1.
Logo a série numérica
é convergente e concluı́mos a convergência uniforme da série de potências pelo Teorema 10.12.
Observação: As funções definidas por séries de potências são infinitamente deriváveis no intervalo de convergência e suas derivadas são
obtidas derivando-se a série termo a termo. De fato, seja
ϕk (x) =
k
X
j=0
aj (x − x0 )j ,
x ∈ IR = (x0 − R, x0 + R),
p
P∞
onde R = 1/ lim supk→∞ k |ak | e ϕ a série de potências j=1 aj (x −
x0 )j (ϕ é o limite pontual de ϕk em IR ). Como ϕk é derivável,
Pk
ϕ′k (x) = j=0 jaj (x − x0 )j−1 e
p
p
lim sup k (k + 1)|ak+1 | = lim sup k |ak | = 1/R,
k→∞
k→∞
p
segue do Teorema 10.14 que existe ψ: IR → R tal que ϕ′k −→ ψ em
u
IR e ϕ′k −→
ψ em todo intervalo I tal que I seja contido em IR .
Portanto, pelo Teorema 10.9, ϕ é derivável em IR e ϕ′ = ψ. Como
podemos repetir este argumento ao infinito, temos a conclusão.
172
Cálculo Avançado I
A matriz exponencial
Podemos estender de modo natural as definições de convergência
pontual e convergência uniforme às sequências de F (A, W ), onde
A ⊂ V , com V e W espaços vetoriais normados (de dimensão finita
ou não), mantendo a validade da maioria dos resultados anteriores.
Assim, por exemplo, se W é espaço de Banach, temos a extensão do
Teorema 10.5.
Essas extensões são particularmente importantes para o caso M =
Mn×n do espaço das matrizes n × n (ou equivalentemente L(Rn , Rn )
o espaço das transformações lineares de Rn em Rn ). Além da estrutura de espaço vetorial de dimensão finita, M é uma álgebra se munido do produto usual de matrizes (ou equivalentemente munido da
composição de funções), de modo que podemos considerar as séries
de potências de matrizes. Mais precisamente, se Φk : M → M é
polinômio da forma
Φk (X) =
k
X
j=1
aj (X − X0 )j ,
X ∈ M,
podemos perguntar:
Problema: Para quais X ∈ M temos a convergência pontual da sequência {Φk }k ? Onde ocorre a convergência uniforme?
Com argumentos análogos aos anteriores podemos mostrar que
p
existe Φ: BR (X0 ) → M tal que Φk −→ Φ em BR (X0 ) = X ∈
M ; kX − X0 k < R , com R definido por (10.11).
ΦP
é denominada Série de Potências em torno de X0 , que denotamos
∞
por k=1 ak (X − X0 )k e, por analogia, BR (X0 ) o seu intervalo de
convergência.
Com argumentos análogos aos anteriores (veja Teorema 10.14),
podemos provar o seguinte resultado sobre a convergência uniforme
de séries de potências em M.
P∞
Teorema 10.14 (bis): Seja k=1 ak (X − X0 )k uma série de potências em torno de X0 em M = Mn×n e S um subconjunto de BR (X0 )
Sequências de Funções
173
tal que S ⊂ BR (X0 ), onde R é definido por (10.11). Então a série
converge uniformemente em S.
Exemplo: (A Matriz Exponencial) Seja Φk : M → M definida por
1
1
Φk (X) = I + X + X 2 + · · · + X k .
2
k!
p
p
Como limk→∞ k 1/k! = 0, existe Φ: M → M tal que Φk −→ Φ
em M e uniformemente em qualquer conjunto limitado de M. Φ é
denominada a Matriz Exponencial de X que denotamos por eX ou
exp(X), isto é
∞
X
1 k
exp(X) =
(10.12)
X .
k!
k=0
Observação: É possı́vel mostrar que, para toda matriz A ∈ M, a
exponencial exp(A) é invertı́vel [exp(A)]−1 = exp(−A).
Exercı́cios
Exercı́cio 10.1. Seja fk : [0, 1] → R a função definida por
fk (x) = lim (cos k!πx)2j .
j→∞
Mostre que
fk (x) =
n
1 se x ∈ {1/k!, 2/k!, . . . , 1},
0 senão
e que fk converge pontualmente em [0, 1] para a função
n
1 se x é racional,
f (x) =
0 se x é irracional.
Exercı́cio 10.2. Dê exemplo de sequência de funções sci que converge
pontualmente para uma função que não é sci.
Exercı́cio 10.3. Sejam {fk } e {gk } sequências de funções definidas
em A ⊂ Rn com valores em Rm . Se {fk } e {gk } convergem uniformemente em A, prove que {fk + gk } converge uniformemente em A.
174
Cálculo Avançado I
Se, além disso, {fk } e {gk } são sequências de funções uniformemente
limitadas (isto é, kfk (x)k ≤ α e kgk (x)k ≤ β ∀x ∈ A, ∀k), mostre que
{ϕk } definida por ϕk (x) = hfk (x) : gk (x)i converge uniformemente
em A.
Exercı́cio 10.4. Verdadeiro ou falso?
u
a) Se fk −→
f em A, ⇒ {fk } é sequência de funções limitadas.
u
f em A, com A compacto e fk contı́nua para todo k,
b) Se fk −→
⇒ {fk } é sequência de funções uniformemente limitadas.
Exercı́cio 10.5. Sejam g: R → R função de classe C 1 e fk : A ⊂ Rn →
R sequência de funções uniformemente limitadas (isto é, |fk (x)| ≤ α
∀k e ∀x ∈ A), tal que fk −→ f uniformemente em A. Mostre que
g ◦ fk −→ g ◦ f uniformemente em A.
Exercı́cio 10.6. Considere
f (x) =
∞
X
k=1
1
1 + k2 x
Para que valores de x esta série é absolutamente (pontualmente) convergente? Em que intervalos ela é uniformemente convergente? f é
contı́nua nos pontos em que a série converge? f é limitada?
P∞
k x2 +k
Exercı́cio 10.7. Prove que a série
converge unik=1 (−1)
k2
formemente em todo intervalo limitado, mas não converge absolutamente em nenhum x.
0 −1
Exercı́cio 10.8. Seja X =
. Mostre que
1 0
cos θ
exp(θX) =
sen θ
− sen θ
.
cos θ
Exercı́cio 10.9. Seja M = Mn×n e considere X ∈ M tal que
kXk < 1.
a) Mostre que I + X é invertı́vel.
P∞
k k
b) Mostre que a série de potências
k=0 (−1) X converge pon−1
tualmente para (I + X) em B1 (0).
Sequências de Funções
175
c) Seja I = X ∈ M ; X é invertı́vel e f : I → M a função
f (X) = X −1 . Mostre que f é diferenciável em I e calcule f ′ (X).
Exercı́cio 10.10. Seja A ∈ Mn×n (R) e considere a matriz exponencial exp(θA) (veja (10.12)). Mostre que:
d
exp(θA) = A exp(θA) = exp(θA)A.
dθ (b) det exp(A) = etr A .
(a)
Sug.: Considere ϕ(θ) = det exp(θA) e calcule ϕ′ (θ).
Exercı́cio 10.11. Mostre que
lim kxkp = kxk∞
p→+∞
uniformemente nos compactos de Rn .
Exercı́cio 10.12. Seja f : Rn −→ Rn tal que f (0) = 0 e considere
{fk }k a sequência definida por fk : B → Rn ,
x
fk (x) = kf ( ) ∀x ∈ B,
k
onde B = {x ∈ Rn ; 12 ≤ kxk ≤ 1}. Mostre que se {fk }k converge
uniformemente em B para uma transformação linear L: Rn −→ Rn ,
então f é diferenciável em 0.
Exercı́cio 10.13. Seja K ⊂ Rn compacto e {fk }k sequência de
funções reais contı́nuas convergindo pontualmente em K para uma
função contı́nua f . Se
fk (x) ≤ fk+1 (x),
∀x ∈ K,
k = 1, 2, . . .
mostre que a convergência é uniforme. Mostre que o resultado é falso
se K não é compacto.
11
O Espaço C(K;Rm)
Seja K um subconjunto compacto de Rn e considere
C(K; Rm ) = f : K → Rm ; f é função contı́nua .
C(K; Rm ) é espaço vetorial (com as operações usuais de soma de
funções e produto por escalar) de dimensão infinita. De fato, num
espaço vetorial V de dimensão n, qualquer subconjunto com mais de
n vetores é necessariamente linearmente dependente. Consideremos,
por exemplo, V = C([0, 1]; R). Para todo k ∈ N seja Ak o subconjunto Ak = {f1 , f2 , . . . , fk }, onde fk (x) = xk . É fácil ver que Ak
é linearmente independente, qualquer que seja k ∈ N. Logo, V não
pode ser de dimensão finita.
A norma natural de C(K; Rm ) é a norma k k∞ definida por
kf k∞ = max kf (x)k ; x ∈ K ,
onde k k é uma norma qualquer de Rm .
Observação: O termo “natural” a que nos referimos acima é aqui
justificado pelos resultados que se seguem, isto é, a norma k k∞ é
natural do ponto de vista matemático. Como na prática a norma
natural é em geral a que melhor convém a uma dada aplicação ou
a um dado problema, pode ocorrer que a “natural” não seja a que
178
Cálculo Avançado I
proporciona boas propriedades ao espaço. Por exemplo, a norma
euclidiana em C([a, b], R), definida por
!1/2
Z
b
kf k2 =
a
|f (x)|2
,
é natural para muitas aplicações, como por exemplo os problemas que
envolvem séries de Fourier, etc. Porém, C([a, b], R) não é espaço de
Banach para esta norma, não ficam assim assegurados os processos
de limite.
Teorema 11.1: O espaço C(K; Rm ) munido da norma k k∞ é espaço
de Banach. Além disso,
kfk − f k∞ → 0
⇐⇒
u
fk −→
f
em K.
Prova: Seja {fk }k sequência de Cauchy em C(K; Rm ). Então {fk }k
é uniformemente de Cauchy. Pelos Teoremas 10.5 e 10.6, existe
u
f ∈ C(K; Rm ) tal que fk −→
f em K. A conclusão segue da
Proposição 10.3.
Observação: O Teorema 11.1 assegura a validade em C(K; Rm ) dos
principais resultados demonstrados nos capı́tulos anteriores. Em especial, o Teorema do Ponto Fixo de Banach, o Teorema da Função
Inversa, o Teorema da Função Implı́cita, o Teorema dos Multiplicadores de Lagrange, etc., que são importantes para as aplicações.
Aplicação: o Teorema de Picard
Como aplicação dos resultados estudados até aqui, vamos apresentar nesta seção um prova elegante do Teorema de Picard para a
existência e unicidade de soluções do Problema de Valor Inicial para
Sistemas de Equações Diferenciais Ordinárias.
Problema: Seja T > 0 e x0 ∈ Rn . Dada f : [0, T ]×Rn → Rn ,
deseja-se saber se existe uma única curva γ: [0, T ] → Rn diferenciável em ]0, T [ tal que
(
γ ′ (t) = f t, γ(t) , ∀t ∈ ]0, T [,
(11.1)
γ(0) = x0 .
m
O Espaço C(K;R )
179
Uma resposta afirmativa para o problema é dada pelo Teorema de
Picard (para uma forma mais geral, veja exercı́cios).
Teorema 11.2: Seja f : [0, T ] × Rn → Rn função contı́nua satisfazendo a seguinte propriedade: existe L ≥ 0 tal que
∀x, y ∈ Rn ,
kf (t, x) − f (t, y)k ≤ Lkx − yk,
∀t ∈ [0, T ].
(11.2)
Então, para cada x0 ∈ Rn , existe uma única curva γ: [0, T ] → Rn de
classe C 1 em ]0, T [ satisfazendo (11.1).
Prova: Seja V = C [0, T ]; Rn e considere a função Ψ: V → V
definida por (veja notação em (5.20))
Z
Ψ(γ)(t) = x0 +
t
0
Então, para todo t ∈ [0, T ]
kΨ(γ1 )(t) − Ψ(γ2 )(t)k ≤
Z
t
0
f s, γ(s) ds.
kf s, γ1 (s) − f s, γ2 (s) k ds
(11.3)
≤ Lkγ1 − γ2 k∞ t.
Consideremos Ψ2 = Ψ ◦ Ψ. Então, para toda γ ∈ V ,
2
Ψ (γ)(t) = x0 +
Z
t
0
e obtemos de (11.3) ∀t ∈ [0, T ]
2
2
kΨ (γ1 )(t) − Ψ (γ2 )(t)k ≤
Z
0
t
f s, Ψ(γ)(s) ds
LkΨ(γ1 )(s) − Ψ(γ2 )(s) k ds
≤ L2 kγ1 − γ2 k∞
t2
.
2
Repetindo o argumento para Ψ3 , . . . , Ψk , obtemos
kΨk (γ1 )(t) − Ψk (γ2 )(t)k ≤
L k tk
kγ1 − γ2 k∞ ,
k!
∀t ∈ [0, T ].
(11.4)
180
Cálculo Avançado I
Passando ao supremo em t ∈ [0, T ] na desigualdade (11.4), temos
kΨk (γ1 ) − Ψk (γ2 )k∞ ≤
Lk T k
kγ1 − γ2 k∞ .
k!
Fixando k ∈ N tal que Lk T k /k! < 1, concluı́mos que Ψk é contração
em V . Sendo V um espaço de Banach, existe um único γ ∈ V ponto
fixo para Ψk . Logo (veja Exercı́cio 4.24), γ é ponto fixo de Ψ, isto é,
γ(t) = x0 +
Z
t
0
f s, γ(s) ds.
Para concluir que γ é de classe C 1 , basta observar que a aplicação
t 7→ f (t, γ(t)) é contı́nua de ]0, T [ em Rn .
Corolário 11.3: Seja f : [0, +∞[×Rn → Rn função contı́nua satisfazendo a condição de Lipschhitz (11.2) para todo t ≥ 0. Então, para
cada x0 ∈ Rn , existe uma única curva γ: [0, +∞[→ Rn de classe C 1
em ]0, +∞[ satisfazendo (11.1).
Prova: Fixe T > 0, 0 < ε < T /2 e aplique sucessivamente o Teorema 11.2 nos intervalos [0, T ], [T − ε, 2T ], [2T − ε, 3T ], . . ..
O Teorema de Arzelà-Ascoli
Uma das diferenças marcantes entre o Rn (ou mais geralmente entre
um espaço de dimensão finita) e C(K; Rm ) é sobre a caracterização
dos conjuntos compactos. Por exemplo, os fechados e limitados de
C(K; Rm ) não são necessariamente compactos.
De fato, mostremos que a bola fechada
B = f ∈ C [0, 1]; R ; kf k∞ ≤ 1
não é um conjunto compacto em C([0, 1], R). Seja (veja Figura 11.1)
fk (x) =
x2
,
x2 + (1 − kx)2
x ∈ [0, 1].
m
O Espaço C(K;R )
181
p
É fácil ver que kfk k∞ ≤ 1 e que fk −→ 0 em [0, 1]. Se B fosse
compacto, a sequência {fk } admitiria uma subsequência convergente
(necessariamente a zero), o que é impossı́vel, pois
kfk k∞ = |fk (1/k)| = 1.
1.2
1
0.8
y
0.6
0.4
0.2
0
0.2
0.4
x
0.6
0.8
1
Figura 11.1
A caracterização dos conjuntos compactos de C(K; Rm ) é dada pelo
Teorema de Arzelà-Ascoli que veremos a seguir.
Definição 11.4: Dizemos que X ⊂ C(K; Rm ) é equicontı́nuo se
∀ε > 0 existe δ > 0 tal que se x, y ∈ K e kx − yk < δ, então
kf (x) − f (y)k < ε, ∀f ∈ X .
Se X ⊂ C(K, Rm ), denotamos X (x) = {f (x) ; f ∈ X }.
Teorema 11.5: Seja K ⊂ Rn compacto e X ⊂ C(K, Rm ). Então
X é relativamente compacto em C(K, Rm ) se e somente se X é
equicontı́nuo e, para todo x ∈ K, X (x) é limitado de Rm .
A prova é consequência dos seguintes lemas:
Lema 11.6: Se X é compacto em C(K, Rm ) então X é equicontı́nuo
e, para todo x ∈ K, X (x) é compacto em Rm .
Prova: Seja x0 ∈ K. Provemos que X (x0 ) é compacto. Consideremos {ξk } uma sequência de X (x0 ). Por definição, existe fk ∈ X
tal que fk (x0 ) = ξk . Como X é compacto, {fk } admite uma subsequência {fki } tal que fki −→ f uniformemente para algum f ∈ X .
182
Cálculo Avançado I
Em particular, ξki = fki (x0 ) −→ f (x0 ) ∈ X (x0 ). Logo X (x0 ) é
compacto.
Provemos que X é equicontı́nuo. Dado ε > 0, consideremos a
cobertura {Bε (f )}f ∈X de X , onde
Bε (f ) = {g ∈ C(K, Rm ) ; kg − f k∞ < ε}
Como
X é compacto, existem f1 , f2 , . . . , fk em X tais que X ⊂
Sk
B
i=1 ε (fi ). Como cada fi é contı́nua em K e K é compacto, fi
é uniformemente contı́nua em K:
∃δi > 0 tal que kx − yk < δi ⇒ kfi (x) − fi (y)k < ε.
Seja δ = min{δ1 , δ2 , . . . , δk }. Se f ∈ X , então f ∈ Bε (fi0 ) para algum
1 ≤ i0 ≤ k e se kx − yk < δ,
kf (x) − f (y)k ≤ kf (x) − fi0 (x)k + kfi0 (x) − fi0 (y)k
+ kfi0 (y) − f (y)k ≤ 2kf − fi0 k∞ + kfi0 (x) − fi0 (y)k.
Mas kfi0 (x) − fi0 (y)k < ε pois kx − yk < δ ≤ δi0 e kf − fi0 k∞ < ε
pois f ∈ Bε (fi0 ).
Portanto kf (x) − f (y)k < 3ε, o que implica X equicontı́nuo.
Lema 11.7: Seja X subconjunto fechado de C(K, Rm ). Se X é
equicontı́nuo e, para todo x ∈ K, X (x) é compacto em Rm , então X
é compacto em C(K, Rm ).
Prova: Consideremos {fk } uma sequência qualquer de X e E =
{x1 , x2 , . . .} ⊂ K enumerável tal que E = K (veja Exercı́cio 3.4).
Por hipótese X (x1 ) é compacto. Então {fk (x1 )} ⊂ X (x1 ) admite
uma subsequência (que designaremos por {fk1 (x1 )}) convergente para
um elemento ξ1 de X (x1 ).
Como X (x2 ) é compacto, {fk1 (x2 )} admite subsequência {fk2 (x2 )}
convergente para um elemento ξ2 de X (x2 ). E assim, sucessivamente,
construı́mos subsequências de {fk }, a saber {fkj }k , satisfazendo as
seguintes propriedades:
1. {fkj (xj )}k converge em Rm , para todo j ∈ N;
m
O Espaço C(K;R )
183
2. {fkj }k é subsequência de {fkj−1 }k .
Portanto, existe uma sequência ξ1 , ξ2 , . . . em Rm tal que
lim fkj (xl ) = ξl
k→∞
∀l = 1, . . . , j.
(11.5)
Consideremos então a sequência diagonal f11 , f22 , . . . de elementos
de X . Como X é equicontı́nuo, dado ε > 0, ∃δ > 0 tal que
kx − yk < δ ⇒ kfkk (x) − fkk (y)k < ε, ∀k ∈ N.
(11.6)
Seja {Bδ (x)}x∈E a famı́lia de bolas de raio δ centradas nos elementos de E. Como E é densoSem K e este é compacto, existem
l
x1 , x2 , . . . , xl ∈ E tais que K ⊂ j=1 Bδ (xj ).
Tomemos x ∈ K e ε > 0. Então x ∈ Bδ (xl ) para algum l. De
(11.5), sabemos que existe kl ∈ N tal que kfkj (xl ) − ξl k < ε/2 para
todo k ≥ kl e para todo j ≥ l. Portanto, se k0 = max{kl , l}, temos
′
kfkk (xl ) − fkk′ (xl )k < ε,
∀k, k ′ ≥ k0 .
(11.7)
Assim, se k, k ′ ≥ k0 , então
′
′
kfkk (x) − fkk′ (x)k ≤ kfkk (x) − fkk (xl )k + kfkk (xl ) − fkk′ (xl )k
′
′
+ kfkk′ (xl ) − fkk′ (x)k < 4ε.
Como k0 não depende de x, concluı́mos que fkk converge uniformemente para algum f ∈ C(K, Rm ). Em particular, f ∈ X = X .
Lema 11.8: Seja X ⊂ C(K, Rm ). Então
a) X é equicontı́nuo ⇐⇒ X é equicontı́nuo.
b) X (x) ⊂ X (x) ∀x ∈ K.
c) Se X é equicontı́nuo e X (x) é limitado para todo x ∈ K (K
compacto de Rn ), então X (x) = X (x) ∀x ∈ K.
184
Cálculo Avançado I
Prova: (a) A implicação “⇐” é óbvia. Provemos então “⇒”.
Se X é equicontı́nuo, dado ε > 0, ∃ δ > 0 tal que se kx − yk < δ,
então kf (x) − f (y)k < ε/3, ∀f ∈ X . Seja f ∈ X e considere fk ∈ X
com fk −→ f uniformemente em K. Então ∃ k0 ∈ N tal que se
k ≥ k0 , kfk (x) − f (x)k < ε/3 para todo x ∈ K. Portanto,
kf (x) − f (y)k ≤ kf (x) − fk (x)k +
+ kfk (x) − fk (y)k + kfk (y) − f (y)k < ε.
(b) Seja ξx ∈ X (x). Por definição, existe f ∈ X tal que ξx = f (x).
Seja fk ∈ X tal que fk −→ f uniformemente. Então fk (x) −→ f (x)
e portanto f (x) ∈ X (x).
(c) Seja ξ ∈ X (x). Então existe sequência {ξk } em X (x) tal que
ξk −→ ξ. Por definição, existe {fk } sequência em X tal que fk (x) =
ξk . Com o mesmo argumento da prova do Lema 11.7, concluı́mos
que fk possui uma subsequência que converge uniformemente para
f ∈ C(K, Rm ). Assim f ∈ X e ξ = f (x) ∈ X (x).
Prova do Teorema 11.5: Se X é relativamente compacto, X é compacto. Além disso, como X é limitado em C(K, Rm ), tem-se X (x)
limitado em Rm para todo x ∈ K. Pelo Lema 11.6, X é equicontı́nuo
e pelo Lema 11.8, X é equicontı́nuo. Concluı́mos, assim, que X é
equicontı́nuo e X (x) é limitado.
Reciprocamente, se X é equicontı́nuo e X (x) é limitado para todo
x ∈ K, segue do Lema 11.8 que X é equicontı́nuo e X (x) é compacto
para todo x ∈ K. Logo, pelo Lema 11.7, X é compacto e, portanto,
X é relativamente compacto.
Aplicação: o Teorema de Cauchy-Peano
Como aplicação do Teorema de Arzelà-Ascoli (Teorema 11.5), vamos demonstrar o Teorema de Cauchy-Peano sobre a existência de
soluções para problemas de valor inicial.
Teorema 11.9: Seja Ω ⊂ R2 aberto, f : Ω → R uma função contı́nua
e (x0 , y0 ) ∈ Ω. Então existe r > 0 e ao menos uma função de classe
C 1 ϕ: [x0 − r, x0 + r] → R tal que ϕ(x0 ) = y0 satisfazendo
ϕ′ (x) = f x, ϕ(x) ∀x ∈ ]x0 − r, x0 + r[.
(11.8)
m
O Espaço C(K;R )
185
Prova: Seja U ⊂ Ω uma vizinhança limitada de (x0 , y0 ) e considere
M = max{|f (x, y)| ; (x, y) ∈ U }.
Seja r > 0 tal que o retângulo
R = {(x, y) ∈ Ω ; |x − x0 | ≤ r, |y − y0 | ≤ M r} ⊂ U.
Consideremos o intervalo [x0 , x0 + r] e para cada n ∈ N a partição
definida por xi = x0 + ir/n, i = 0, 1, . . . , n. Consideremos também
para cada n ∈ N a função poligonal
ψn (x) =
n
X
ani ϕni (x),
i=0
onde os coeficientes an0 , an1 , . . . , ann são definidos pela recorrência
an0 = y0 ,
ani+1 = ani +
r
f (xi , ani ), i = 0, 1, . . . , n − 1
n
e as funções ϕni são definidas por
n
ϕn0 (x) = n(x1 − x)/r
0
n
ϕnn (x) = n(x − xn−1 )/r
0
e para i = 1, 2 . . . , n − 1,
(
n(x − xi−1 )/r
n
ϕi (x) = n(xi+1 − x)/r
0
(11.9)
se x0 ≤ x ≤ x1 ,
senão
se xn−1 ≤ x ≤ xn
senão
se xi−1 ≤ x ≤ xi
se xi ≤ x ≤ xi+1
senão
(as funções ϕni formam uma base para o espaço vetorial das poligonais
com vértices nos pontos da partição).
Como |ai − a0 | ≤ M r para i = 1, 2, . . . , n, o gráfico de ψn está
inteiramente contido no retângulo R. Além disso, é claro que ψn é
contı́nua com derivada ψn′ contı́nua por partes. Mais precisamente,
ψn′ (x) = (ani − ani−1 )n/r = f (xi−1 , ani−1 ),
∀x ∈ ]xi−1 , xi [.
186
Cálculo Avançado I
Em particular, temos de (11.9)
n
|ψn′ (x)| ≤ |ani − ani−1 | ≤ M
r
e como
Z x
ψn (x) = y0 +
x0
(11.10)
ψn′ (s) ds,
temos
|ψn (x)| ≤ |y0 | + M |x − x0 | ≤ M r.
(11.11)
Consideremos o conjunto X = {ψn ; n ∈ N} que é subconjunto de
C [x0 , x0 +r]; R . Segue de (11.11) que X (x) é limitado para qualquer
x ∈ [x0 , x0 + r]. Além disso, como
Z x′
′
|ψn′ (s)| ds ≤ M |x′ − x|,
|ψn (x) − ψn (x )| ≤
x
segue que X é equicontı́nuo. Decorre do Teorema de Arzelà-Ascoli
que existe uma subsequência (que ainda denotaremos por ψn ) e uma
função ψ ∈ C [x0 , x0 + r], R tais que ψn → ψ uniformemente em
[x0 , x0 + r].
Para concluir, basta mostrar que ψ satisfaz a equação (11.8), o que
é equivalente a mostrar que
Z x
ψ(x) = y0 +
f (s, ψ(s)) ds.
x0
Consideremos as funções Φn e Φ definidas por
Z x
Z
Φn (x) = y0 +
f (s, ψn(s)) ds, Φ(x) = y0 +
x0
x
f (s, ψ(s)) ds
x0
Como f é uniformemente contı́nua em R, dado ε > 0 existe δ > 0 tal
que se |x − x′ | < δ e |y − y ′ | < δ, então |f (x, y) − f (x′, y ′ )| < ε. Como
ψn converge uniformemente para ψ em [x0 , x0 + r], existe n0 ∈ N tal
que se n ≥ n0 , então |ψn (x) − ψ(x)| < δ. Portanto, para n ≥ n0
Z x
|f (s, ψn(s)) − f (s, ψ(s))| ds
|Φn (x) − Φ(x)| ≤
x0
≤
n Z
X
i=1
≤ εr
xi
xi−1
|f (s, ψn(s)) − f (s, ψ(s))| ds
m
O Espaço C(K;R )
187
e concluı́mos que Φn converge uniformemente para Φ.
Por outro lado, como
Φn (x) − ψn (x) =
Z
x
x0
f (s, ψn(s)) − ψn′ (s) ds,
podemos escrever
|Φn (x) − ψn (x)| ≤
≤
n Z
X
xi
i=1 xi−1
n Z xi
X
i=1
xi−1
|f (s, ψn(s)) − ψn′ (s)| ds
|f (s, ψn(s)) − f (xi−1 , ani−1 )| ds
≤ εr
Portanto a sequência Φn − ψn converge uniformemente para 0. Como
ψn converge uniformemente para ψ, concluı́mos que Φ = ψ. Como
o mesmo argumento pode ser repetido para o intervalo [x0 − r, x0 ],
concluı́mos a prova.
O Teorema de Weierstrass
Como foi mencionado anteriormente, C(K; Rn ) é um espaço de
Banach quando munido da norma do máximo. Portanto, no que se
refere aos processos de limite, ele apresenta semelhanças com R. Uma
propriedade importante de R, denominada separabilidade, é que R
possui um subconjunto enumerável e denso, a saber, o conjunto dos
números racionais Q.
O resultado que se segue, denominado Teorema de Weierstrass,
mostra que C([a, b]; R) também possui esta propriedade, sendo portanto um espaço separável. A prova que aqui apresentamos é devida
a H. Lebesgue.
Teorema 11.10: Se f ∈ C [a, b]; R , então existe uma sequência de
polinômios {Pk }k tal que Pk → f uniformemente em [a, b].
Prova: Faremos a prova em duas etapas.
188
Cálculo Avançado I
Etapa 1: Consideremos inicialmente a = 0, b = 1 e suponhamos que
f (0) = 0. Como f é uniformemente contı́nua em [0, 1], dado ε > 0
existe δ > 0 tal que
|x − x′ | < δ
⇒
|f (x) − f (x′ )| < ε/4.
(11.12)
Seja n ∈ N tal que 1/n ≤ δ e considere a partição P = {x0 , . . . , xn }
de [0, 1] definida por
xi = i/n,
i = 0, 1, . . . , n.
Para cada i = 0, 1, . . . , n−1, considere a função ϕi : [0, 1] → R definida
por
ϕi (x) = (x − xi )+ .
É fácil ver que {ϕi }i é uma base para o espaço das poligonais ψ que
têm vértices nos pontos de P e que satisfazem ψ(0) = 0. Seja
ψ(x) =
n−1
X
αi ϕi (x),
i=0
onde os coeficientes αi são definidos pela recorrência
(
α0 = nf (x1 )
(11.13)
αi = n f (xi+1 ) − 2f (xi ) + f (xi−1 ) , i = 1, . . . , n − 1.
Então ψ(xi ) = f (xi ), para i = 0, 1, . . . , n e como consequência de
(11.12) temos kf − ψk∞ < ε/2. Por outro lado, como
ϕi (x) =
1
|x − xi | + x − xi ,
2
se provarmos que as funções x 7→ |x − xi |, i = 1, 2, . . . , n − 1, podem
ser aproximadas uniformemente por polinômios em [0, 1], teremos
concluı́do a demostração desta etapa. De fato, suponhamos que exista
um polinômio Qi (x) tal que
|x − xi | − Qi (x) <
ε
,
2nM
∀x ∈ [0, 1],
i = 0, . . . , n − 1,
m
O Espaço C(K;R )
189
onde M = max{|α0 |, . . . , |αn−1 |}. Então, considerando
P (x) =
n−1
X
i=0
αi Pi (x), onde Pi (x) = Qi (x) + x − xi ,
temos
kf − P k∞ ≤ kf − ψk∞ + kψ − P k∞ < ε.
Provemos, então, que x 7→ |x − xi |, i = 0, . . . , n − 1, pode ser aproximada uniformemente por polinômios em [0, 1].
√
A série de Taylor de φ(ξ) = 1 − ξ em torno de ξ = 0 é
∞
X
(2ν − 3)!
1
1− ξ−
ξν ,
2ν−1
2
ν!
(ν
−
1)!
2
ν=2
cujo intervalo de convergência é |ξ| < 1. Portanto, se considerarmos
a sequência de polinômios {Sk }k definidos por
k
X
1
(2ν − 3)!
Sk (ξ) = 1 − ξ −
ξν ,
2ν−1
2
ν!
(ν
−
1)!
2
ν=2
então Sk converge absoluta e uniformemente para φ nos compactos
de |ξ| < 1. Além disso, para |ξ| ≤ 1, temos
|aν ξ ν | =
(2ν − 3)!
1
k
|ξ|
≤
, ∀ν ≥ 2
ν!(ν − 1)!22ν−1
ν!2ν
e, do teste M de√Weirestrass, concluı́mos que Sk (ξ) converge uniformemente para 1 − ξ em [−1, 1].
Em particular, Pk (ξ) = Sk (1 − ξ 2 ) define uma
p sequência de polinô2
mios que converge
√ uniformemente para ξ√7→ 1 −
√ (1 − ξ ) = |ξ| no
intervalo |ξ| ≤ 2. Como [0, 1] ⊂ ]xi − 2, xi + 2[, os polinômios
Pk (x − xi ) fornecem a sequência desejada.
Etapa 2: Seja f ∈ C [a, b]; R e considere g: [0, 1] → R definida por
g(x) = f xb + (1 − x)a − (1 − x)f (a).
190
Cálculo Avançado I
Então g ∈ C [0, 1]; R e satisfaz g(0) = 0. Segue da Etapa 1 que
existe uma sequência de polinômios Gk que converge uniformemente
para g em [0, 1].
Seja Pk o polinômio definido por
Pk (x) = Gk
x−a
b−a
x−a
+ 1−
f (a).
b−a
Então Pk → f uniformemente em [a, b].
Funcionais Contı́nuos e Diferenciáveis
As funções reais definidas em C(K; Rm ) são denominadas funcionais de C(K; Rm ) e as definições de funções contı́nuas e funções
diferenciáveis se estendem ipsis litteris aos funcionais. Como nunca
é demais recordar, temos,
Definição 11.11: Dizemos que um funcional J: C(K; Rm ) → R é
contı́nuo em f0 se para todo ε > 0, existe δ > 0 tal que se kf −
f0 k∞ < δ, então |J(f ) − J(f0 )| < ε. Dizemos que J é contı́nuo em
X ⊂ C(K; Rm ) se é contı́nuo em todos os pontos de X .
Definição 11.12:: Dizemos que um funcional J: C(K; Rm ) → R é
diferenciável em f0 se existem funcionais ǫ, L: C(K; Rm ) → R tais
que
J(f0 + ϕ) = J(f0 ) + L(ϕ) + ǫ(ϕ),
onde L é linear contı́nuo e ǫ é o kϕk∞ . Neste caso, L é denominado
a Diferencial de Fréchet de J em f0 .
Se J é diferenciável em todos os pontos do aberto O ⊂ C(K; Rm ),
dizemos que J é diferenciável em O.
Nota: Lembre-se que C(K; Rm ) é de dimensão infinita. Portanto,
faz-se necessária a hipótese sobre a continuidade do funcional L,
visto que existem funcionais lineares J: C(K; Rm ) → R que não são
contı́nuos. A construção de tais funcionais,
assim como a carac
terização do espaço dual L C(K; Rm ); R (isto é, o espaço dos funcionais lineares contı́nuos) de C(K; Rm ) está fora do alcance destas
notas.
m
O Espaço C(K;R )
191
Exemplo 1: Se g: R → R é função contı́nua, então o funcional
J: C(K; Rm) → R definido por
Z
J(f ) =
b
a
g f (x) dx
(11.14)
é contı́nuo em C [a, b], R . Além disso, se g é uma função de classe
C 1 (R), então
o funcional J definido em (11.14) é diferenciável em
C [a, b], R e (veja Exercı́cios)
′
J (f0 )h =
Z
b
g ′ (f0 (x))h(x) dx.
a
Exemplo 2: Sejam x0 ∈ [a, b] e J: C [a, b] → R o funcional
definido
por J(f ) = f (x0 ). J é linear e contı́nuo em C [a, b] . Este funcional
é denominado delta (ou medida) de Dirac em x0 .
Aplicação: Fluxos
Seja T > 0 e f : [0, T ] × Rn → Rn uma função satisfazendo (11.2).
Pelo Teorema 11.2, para cada x0 ∈ Rn , existe uma única curva
γ: [0, T ] → Rn , diferenciável em ]0, T [, solução do problema de valor
inicial (11.1). Temos assim definida a aplicação
Φ: Rn → C [0, T ], Rn
(11.15)
x0
7→
Φ(x0 )
onde γ(t) = Φ(x0 )(t) é a solução de (11.1), isto é,
Φ(x0 )(t) = x0 +
Z
t
0
f s, Φ(x0 )(s) ds.
(11.16)
Definição 11.13: A aplicação (11.15)-(11.16) é denominada o Fluxo
gerado por f .
Exemplo: Como exemplo particularmente importante, consideremos a função linear f (x) = Ax, onde A é matriz n × n. Então
192
Cálculo Avançado I
podemos verificar facilmente que o fluxo gerado por f é dado pela
matriz exponencial exp(tA) (veja (10.12)), isto é,
Φ(x0 )(t) = exp(tA)x0 ,
∀t ∈ R, ∀x0 ∈ Rn .
Além disso, se f (t, x) = A(t)x, onde A(t) = [aij (t)] é uma matriz
n × n cujos coeficientes
são funções contı́nuas de t, então é fácil ver
Rt
que, se B(t) = 0 A(s) ds comuta com A, isto é, A(t)B(t) = B(t)A(t)
para todo t, o fluxo gerado por f é dado pela matriz exponencial
exp(B(t)).
O teorema a seguir é um resultado básico da Teoria das Equações
Diferenciais, conhecido como dependência contı́nua das soluções com
relação aos dados iniciais. Ele afirma que se os dados iniciais x0 e x̃0
do problema de valor inicial (11.1) estão próximos, então as respectivas curvas soluções permanecem próximas. Mais precisamente,
Teorema 11.14: Seja f : [0, T ] × Rn → Rn uma função satisfazendo
(11.2). Então o fluxo gerado
por f é uma função Lipschitz-contı́nua
de Rn em C [0, T ], Rn .
A prova é consequência imediata da desigualdade de Gronwall.
Lema 11.15: (Gronwall) Sejam α, β ≥ 0 e ϕ: [0, T ] → R uma função
contı́nua e positiva tal que
Z t
ϕ(t) ≤ α + β
ϕ(s) ds, ∀t ∈ [0, T ].
0
βt
Então, ϕ(t) ≤ αe , ∀t ∈ [0, T ].
Rt
Prova: Seja ψ(t) = α + β 0 ϕ(s) ds. Então ψ ′ (t) = βϕ(t) ≤ βψ(t).
Multiplicando a desigualdade por e−βt , podemos escrever
d −βt
e ψ(t) ≤ 0,
dt
de onde se obtém e−βt ψ(t) ≤ ψ(0) = α e a conclusão.
Prova do Teorema 11.14: Sejam x0 e x dois pontos de Rn . Então
Z t
Φ(x0 )(t) = x0 +
f s, Φ(x0 )(s) ds
0
Z t
Φ(x)(t) = x +
f s, Φ(x)(s) ds
0
m
O Espaço C(K;R )
193
Subtraindo as duas identidades e calculando a norma em Rn , temos
Z t
kΦ(x)(t) − Φ(x0 )(t)k ≤ kx − x0 k + L
kΦ(x)(s) − Φ(x0 )(s)k ds
0
Pela desigualdade de Gronwall, obtemos
kΦ(x)(t) − Φ(x0 )(t)k ≤ kx − x0 keLt .
Passando ao supremo em t, concluı́mos
kΦ(x) − Φ(x0 )k∞ ≤ kx − x0 keLT .
O próximo resultado estabelece uma relação entre a diferencial do
fluxo gerado por f e o fluxo gerado por f ′ . Mais precisamente, consideremos uma função f : [0, T ] × Rn → Rn de classe C 1 satisfazendo
(11.2) e γ(t), 0 ≤ t ≤ T , uma curva de Rn . O problema de valor
inicial
(
h′ (t) = f ′ t, γ(t) h(t), ∀t ∈ ]0, T [,
(11.17)
h(0) = h0 ,
é denominado linearizado de (11.1) em relação a γ(t).
Teorema 11.16: Seja f : [0, T ] × Rn → Rn uma função de classe C 1
satisfazendo (11.2) e Φ o fluxo associado a f . Então Φ é diferenciável
em Rn e sua diferencial é o fluxo associado ao problema de valor
inicial
( ′
h (t) = f ′ t, Φ(x0 )(t) h(t), ∀t ∈ ]0, T [,
(11.18)
h(0) = h0 .
Prova: Sejam x0 , h0 ∈ Rn , y(t) = Φ(x0 + h0 )(t), x(t) = Φ(x0 )(t) e
h(t) = Ψ(h0 )(t), onde Φ é o fluxo gerado por f e Ψ denota o fluxo
associado ao problema de valor inicial (11.18). Então
Z t
y(t) = x0 + h0 +
f s, y(s) ds,
0
Z t
(11.19)
x(t) = x0 +
f s, x(s) ds,
0
Z t
h(t) = h0 +
f ′ s, x(s) h(s) ds.
0
194
Cálculo Avançado I
Portanto, se ϕ(t) = ky(t) − x(t) − h(t)k, temos
ϕ(t) ≤
≤
Z
t
0
Z
t
kf s, y(s) − f s, x(s) − f ′ s, x(s) h(s)k ds
kf ′ s, x(s) (y(s) − x(s) − h(s))k ds +
0
Z t
+
kǫ s, x(s), y(s) − x(s) k ds
(11.20)
0
onde ǫ(s, ξ, ζ) = f (s, ξ + ζ) − f (s, ξ) − f ′ (s, ξ)ζ.
De (11.20) obtemos
ϕ(t) ≤ C1
Z
t
ϕ(s) ds + C2 ,
0
onde C1 = max{kf ′ s, x(s) k ; s ∈ [0, T ]} e
C2 =
Z
0
T
kǫ s, x(s), y(s) − x(s) k ds.
Decorre da desigualdade de Gronwall que ϕ(t) ≤ C2 eC1 t , ∀t ∈ [0, T ],
de modo que, tomando o supremo em [0, T ], obtemos
kΦ(x0 + h0 ) − Φ(x0 ) − Ψ(h0 )k∞ ≤ C2 eC1 T .
(11.21)
Como kǫ(s, x(s), ζ)k/kζk → 0 quando ζ → 0 uniformemente nos
compactos de [0, T ] × Rn (veja (5.21)), dado ε > 0 existe δ > 0 tal
que
Z T
kǫ s, x(s), y(s) − x(s) k ds ≤ εT ky − xk∞
0
se ky − xk∞ < δ. Portanto, segue de (11.21) que se ky − xk∞ < δ,
então
kΦ(x0 + h0 ) − Φ(x0 ) − Ψ(h0 )k∞ ≤ εT eC1 T ky − xk∞ .
Por outro lado, decorre do Teorema 11.14 que
ky − xk∞ = kΦ(x0 + h0 ) − Φ(x0 )k∞ ≤ eLT kh0 k.
(11.22)
m
O Espaço C(K;R )
195
Logo, kΦ(x0 + h0 ) − Φ(x0 ) − Ψ(h0 )k∞ ≤ εT e(C1 +L)T kh0 k, e como
h0 7→ Ψ(h0 ) é linear e contı́nua, concluı́mos a prova.
Observação: Uma aplicação importante do Teorema 11.16 é a Fórmula de Derivação de Euler, que permite derivar em relação a t certas
funções definidas por integrais sobre regiões de Rn que variam com
o tempo. Mais precisamente, se f (t, x) é uma função satisfazendo as
hipóteses do Teorema 11.16 e Ω(t) é a imagem de Ω0 pelo fluxo Φ
gerado por f , então
d
dt
Z
ρ(t, x) dx =
Ω(t)
Z
Ω(t)
∂ρ
+ div(ρf ) dx.
∂t
Exercı́cios
Exercı́cio 11.1. Sejam g: R → R e ψ: [a, b] → R funções contı́nuas.
Mostre que o funcional
J: C [a, b]; R → R,
é contı́nuo em C [a, b]; R
J(f ) =
Z
b
ψ(x)g f (x) dx
a
Exercı́cio 11.2. Sejam Ji : C [a, b]; R → R, i = 1, 2, 3 os funcionais
definidos abaixo.
J1 (f ) =
Z
b
cos f (x) dx,
a
J3 (f ) =
Z
a
J2 (f ) =
Z
a
b
b
p
f (x)
dx,
1 + f (x)2
|f (x)|p dx, (p > 0).
Mostre que J1 e J2 são funcionais uniformemente contı́nuos e que J3
é uniformemente contı́nuo se e somente se p = 1.
Exercı́cio 11.3. Seja K ⊂ Rn compacto e J: C K; R → R um
funcional. Mostre
que J é contı́nuo ⇐⇒ para toda sequência {fk }
em C K; R , se fk −→ f uniformemente em K então J(fk ) −→ J(f ).
196
Cálculo Avançado I
Exercı́cio 11.4. Verifique
quais dos conjuntos abaixo são compactos
em V = C [a, b]; R :
Rx
a) F1 = {φ ∈ V ; |φ(x)| ≤ 1 + a |φ(s)| ds}.
b) F2 = {φ ∈ V ; φ derivável, φ(a) = 1, 0 ≤ φ′ (x) < φ+ (x)}.
c) F3 = {φ ∈ V ; φ derivável, φ′ ∈ F1 }.
Quais são fechados? Quais são limitados?
Exercı́cio 11.5. Seja X = {fk }k∈N , onde fk : [0, +∞[→ R é definida
por
p
fk (x) = sen x + 4k 2 π 2 .
a) Prove que X é equicontı́nuo e uniformemente limitado.
b) Prove que fk → 0 pontualmente, mas não converge uniformemente em [0, +∞[.
(Qual a incoerência com o Teorema de Arzelà-Ascoli?)
Exercı́cio 11.6. Mostre que se f : [0, 1] → R é função contı́nua tal
que
Z 1
f (x)xn dx = 0, n = 0, 1, 2, . . . ,
0
então f (x) = 0 em [0, 1].
Sugestão: Use o Teorema de Weierstrass.
Exercı́cio 11.7. Seja fk : [0, 1] → R a solução do problema de valor
inicial:
y
y′ =
, y(0) = ak .
1 + y2
Se ak −→ a, mostre que fk −→ f uniformemente em [0, 1], onde
f : [0, 1] → R é a solução do problema de valor inicial:
y′ =
y
,
1 + y2
y(0) = a.
Exercı́cio 11.8. Considere a sequência {αi }i=0,...,n−1 definida em
(11.13). Mostre que ψ(x) = α0 (x − x0 )+ + · · · + αn−1 (x − xn−1 )+
satisfaz
ψ(xj ) = f (xj ), j = 0, 1, . . . , n.
m
O Espaço C(K;R )
197
Exercı́cio 11.9. Seja V = C [0, 1]; R e J: V → R o funcional
definido por
Z 1
1
J(f ) =
dx,
∀f ∈ V.
2
0 1 + f (x)
a) Mostre que J é contı́nuo em V .
b) Seja X o conjunto {f ∈ V ; f (0) = 0 e f é função Lipschitz
contı́nua com constante L > 0}. Mostre que existe f ∈ X tal
que J(f ) = min{J(f ) ; f ∈ X }.
c) Calcule f .
Exercı́cio 11.10. Seja V = C [a, b]; R e J: V → R o funcional
definido por
Rb
|f (x)| dx se f 6≡ 0,
a
J(f ) =
α
se f ≡ 0,
onde α ∈ R. Para que valores de α J é funcional semicontı́nuo em
V?
Exercı́cio 11.11. Sejam ψ: [a, b] → R função contı́nua e g: R → R
função de classe C 1 . Mostre que o funcional
J: C [a, b]; R → R
Z b
ψ(x)g f (x) dx
J(f ) =
a
Rb
é diferenciável em C [a, b]; R e que J ′ (f )h = a ψ(x)g ′ (f (x))h(x) dx
Exercı́cio 11.12. Seja V = C [0, 2]; R e considere o funcional
J: V → R definido por
Z 2
xf (x)
p
J(f ) =
dx.
1 + f (x)2
0
a) Mostre que J é funcional contı́nuo em V ;
b) Mostre que J é diferenciável em V e calcule J ′ (f )ϕ;
c) Seja X ⊂ V o conjunto das funções que satisfazem as seguintes
propriedades
198
Cálculo Avançado I
• f (0) = 0 e |f (2)| ≤ 1;
• |f (x) − f (y)| ≤ |x − y| ∀x, y ∈ [0, 2].
Mostre que X é compacto em V .
d) Calcule f0 em X tal que J(f0 ) = max J(f ) ; f ∈ X .
Exercı́cio 11.13. Seja V = C [a, b]; R munido da norma k k∞ e
considere o conjunto X ⊂ V das funções que satisfazem as seguintes
priopriedades:
(a) f (a) = 0;
(b) para cada f ∈ X , existe αf ∈ [1/2, 1] tal que
|f (x) − f (y)| ≤ |x − y|αf , ∀x, y ∈ [a, b].
Mostre que X é compacto em V .
Exercı́cio 11.14. Seja x0 ∈ [a, b] e J: C [a, b]; R o funcional de
Dirac definido por J(f ) = f (x0 ). Mostre que J é linear e contı́nuo.
Em particular, J é diferenciável e J ′ (f )h = J(h).
Exercı́cio 11.15. Seja f : R × Rn → Rn uma função contı́nua satisfazendo a seguinte propriedade: para cada M ≥ 0, existe LM ≥ 0 tal
que se kxk, kyk ≤ M , então
kf (t, x) − f (t, y)k ≤ LM kx − yk,
∀t ∈ R.
(11.23)
a) Mostre que para todo x0 ∈ Rn existe T ∗ (x0 ) > 0 e uma única
curva γ: [0, T ∗(x0 )[→ Rn diferenciável em ]0, T ∗ (x0 )[ satisfazendo
(
γ ′ (t) = f t, γ(t) ,
γ(0) = x0 .
∀t ∈ ]0, T ∗ (x0 )[,
b) Mostre que se T ∗ (x0 ) < +∞, então
lim
t→T ∗ (x0 )−
kγ(t)k = +∞.
c) Mostre que a aplicação T ∗ : Rn → R é semicontı́nua inferiormente.
m
O Espaço C(K;R )
199
Exercı́cio 11.16. Seja f : [0, +∞) × R → R definida por
(1 − t)x3
f (t, x) = 0
(t − 2)x3
se 0 ≤ t ≤ 1
se 1 ≤ t ≤ 2
se t ≥ 2
Considere o problema de valor incial
(
x′ (t) = f t, x(t) ,
x(0) = x0 ∈ R
Determine a função T ∗ : R → R.
0 < t < T ∗ (x0 )
12
A integral de Riemann em Rn
Neste capı́tulo vamos definir a integral de Riemann para funções com
domı́nio em Rn e apresentar os principais resultados sobre esta integral. No que segue, denotaremos por k k a norma euclidiana em
Rn .
Áreas, volumes, etc...
Dizemos que um conjunto I ⊂ Rn é um n-paralelepı́pedo se existem
intervalos limitados I1 , I2 , . . . , In de R tais que
I = I1 × I2 × · · · × In .
Se Ii = [a, b] para todo i = 1, . . . , n, dizemos que I é um n-cubo. É
claro que I é fechado (resp. aberto) se, e somente se, cada intervalo
Ij é fechado (resp. aberto). Lembremos que um n-pavê é qualquer
n-paralelepı́pedo fechado.
Definição 12.1: Se cada intervalo Ij tem extremidades aj ≤ bj ,
definimos o centro, o conteúdo e o diâmetro de I respectivamente
por
a 1 + b1
a n + bn
,...,
,
2
2
1/2
n
n
Y
X
µ(II ) =
(bj − aj ), diam(II ) = (bj − aj )2 .
j=1
j=1
202
Cálculo Avançado I
É claro que µ(II ) é a área (resp. volume) de I se n = 2 (resp. n = 3).
Definição 12.2: Dizemos que um conjunto A é elementar se existem
n-paralelepı́pedos I 1 , I 2 , . . . , I m tais que
A=
m
[
Ij,
j=1
◦
◦
I i ∩ I j = ∅, se i 6= j,
(isto é, I i e I j não possuem pontos interiores em comum).
Se A é um conjunto elementar, definimos seu conteúdo por
µ(A) =
m
X
µ(IIj ).
j=1
É claro que se A1 e A2 são conjuntos elementares que não possuem
pontos interiores em comum, então A = A1 ∪A2 é elementar e µ(A) =
µ(A1 ) + µ(A2 ).
Definição 12.3: Seja I = I1 ×I2 ×· · ·×In um n-pavê. Dizemos que P
é uma partição de I (e escrevemos P ∈ P(II )) se P = P1 ×P2 ×· · ·×Pn ,
onde cada Pj é uma partição do intervalo Ij = [aj , bj ], isto é,
Pj = a j = ξ 0 < ξ 1 < ξ 2 < · · · < ξ k = b j .
Observe que uma partição P de I define uma única famı́lia de npavês {II1 , I 2 , . . . , I m } tais que
I =
m
[
j=1
Ij,
◦
◦
I i ∩ I j = ∅, se i 6= j,
sendo P a coleção de vértices dos n-pavês. Nas condições acima,
dizemos que {II1 , I 2 , . . . , I m } é a famı́lia de n-pavês gerada por P .
Definição 12.4: Dizemos que P ′ ∈ P(II ) é um refinamento de P se
P′ ⊃ P.
Observe
que
se
I 1 , . . . , I m é a famı́lia de n-pavês gerada por P
′
′
e I 1 , . . . , I l é a famı́lia de n-pavês gerada por P ′ ⊃ P , então cada
n-pavê I i′ está contido em algum n-pavê I j .
A integral de Riemann em R
n
203
Definição 12.5: Seja P ∈ P(II ) e I 1 , . . . , I m a famı́lia de n-pavês
gerada por P . Definimos o módulo de P por
|P | = max diam(II1 ), . . . , diam(IIm ) .
Uma vez definidas essas noções elementares, estamos em condições
de estender a noção de conteúdo para uma classe bem mais ampla de
conjuntos de Rn .
Seja A ⊂ Rn um conjunto limitado e I um n-pavê tal que I ⊃ A.
Consideremos uma partição P ∈ P(II ) e seja I 1 , . . . , I m a famı́lia
de n-pavês gerada por P . Vamos separar os elementos dessa famı́lia
em três categorias:
◦
Cat1 (A, P ) = j ; I j ⊂A ,
Cat2 (A, P ) = j ; I j ∩ A 6= ∅ ,
Cat3 (A, P ) = j ; I j ∩ A = ∅ .
(12.1)
É claro que uma união qualquer de n-pavês da famı́lia gerada por P
é um conjunto elementar. Assim, definimos
X
J(A, P ) =
µ(IIj ),
j∈Cat1 (A,P )
J(A, P ) =
X
µ(IIj ).
j∈Cat2 (A,P )
Os números J(A, P ) e J(A, P ) são denominados soma inferior e soma
superior de Jordan de A relativas à partição P .
Como Cat1 (A, P ) ⊂ Cat2 (A, P ), fica evidente que
0 ≤ J(A, P ) ≤ J(A, P ) ≤ µ(II ).
Além disso, se P ′ ⊃ P , então
J(A, P ) ≤ J(A, P ′ ) ≤ J(A, P ′ ) ≤ J(A, P ).
Definição 12.6: Seja A ⊂ Rn limitado e I um n-pavê tal que I ⊃ A.
Considere os números
c(A) = sup J(A, P ) ; P ∈ P(II ) ,
c(A) = inf J(A, P ) ; P ∈ P(II ) .
204
Cálculo Avançado I
Dizemos que A é mensurável no sentido de Jordan (e escrevemos Jmensurável) se c(A) = c(A), sendo este valor comum, por definição,
o conteúdo de Jordan de A, denotado por c(A).
É claro que c(A) ≤ c(A), qualquer que seja A ⊂ Rn limitado, assim
como é claro também (verifique!) que esses números não dependem
da escolha de I ⊃ A.
O resultado a seguir fornece uma caracterização útil para que um
conjunto limitado A seja J-mensurável. Lembremos que a fronteira
de A (veja o Exercı́cio 3.8) é o conjunto
∂A = x ∈ Rn ; Br (x) ∩ A 6= ∅ e Br (x) ∩ Ac 6= ∅, ∀r > 0 .
Teorema 12.7: Seja A ⊂ Rn um conjunto limitado. Então,
c(∂A) = c(A) − c(A).
Em particular, A é J-mensurável se, e somente se, c(∂A) = 0.
Prova: Seja I um n-pavê tal que I ⊃ A. Se P ∈ P(II ), temos
J(∂A, P ) = J(A, P ) − J(A, P ) ≥ c(A) − c(A).
Portanto,
c(∂A) ≥ c(A) − c(A).
Por outro lado, dado ε > 0, existem partições P1 e P2 de I tais que
J(A, P1 ) < c(A) + ε/2,
J(A, P2 ) > c(A) − ε/2.
Como P1 ∪ P2 é um refinamento de P1 e de P2 , temos
c(∂A) ≤ J(∂A, P ) = J(A, P ) − J(A, P )
< J(A, P1 ) − J(A, P2 ) < c(A) − c(A) + ε.
Como ε > 0 é arbitrário, concluı́mos a demostração.
Teorema 12.8: Seja f : Rn → Rn função localmente Lipschitz, i.e.,
satisfazendo a seguinte propriedade: para todo K ⊂ Rn limitado,
existem constantes positivas M e δ tais que se x, y ∈ K, então
kx − yk < δ
⇒
kf (x) − f (y)k ≤ M kx − yk.
A integral de Riemann em R
n
205
Nessas condições, se c(K) = 0, então c(f (K)) = 0.
Prova: Fixemos
I um n-pavê tal que I ⊃ K e considere o número
√
α = (2M n)n . Dado ε > 0, existe Pε partição de I tal que
J(K, P ) <
ε
,
α
∀P ⊃ Pε .
Fixemos então uma partição P0 ⊃ Pε com |P0 | < δ e seja {II1 , . . . , I m }
a famı́lia gerada, com diâmetro iguais a |P0 | < δ. Então,
µ(IIj ) =
|P0 |n
,
nn/2
Desta forma,
J(K, P0 ) ≤ p
∀j = 1, 2, . . . , m.
|P0 |
√
n
n
<
ε
,
α
onde p ≤ m denota o número de ı́ndices de Cat2 (K, P0 ) (veja (12.1)).
Para cada j ∈ Cat2 (K, P0), seja xj ∈ I j ∩ K. Se y ∈ I j ∩ K, então
ky − xj k < diam(IIj ) = |P0 | < δ
e, portanto,
kf (y) − f (xj )k < M ky − xj k < M |P0 |.
Assim, f (y) está contido na bola de raio M |P0 | e centro f (xj ) e
f (K) ⊂
[
j∈Cat2 (K,P0 )
BM |P0 | f (xj ) ,
de modo que
c f (K) ≤
p
X
i=1
p
X
√
√
(2M |P0 |) = (2M n)n
(|P0 |/ n)n < ε.
n
i=1
Como ε > 0 é arbitrário, a prova está concluı́da.
Corolário 12.9: Sejam f : Rn → Rn de classe C 1 e K ⊂ Rn limitado
tal que c(K) = 0. Então c f (K) = 0.
206
Cálculo Avançado I
Teorema 12.10: Seja f : Rn → Rn de classe C 1 tal que Jf (x) 6= 0
para todo x ∈ Rn . Se K ⊂ Rn é compacto J-mensurável, então f (K)
é J-mensurável.
Prova: Pelo Teorema 12.7, basta mostrar que c(∂f (K)) = 0. Seja
y0 ∈ ∂f (K). Então, para todo aberto U contendo y0 , tem-se
U ∩ f (K) 6= ∅ e
U ∩ f (K)c 6= ∅.
Como ∂f (K) ⊂ K, existe x0 ∈ K tal que y0 = f (x0 ). Como Jf (x0 ) 6=
0, segue do Teorema da Função Inversa que existe δ > 0 tal que para
todo r ≤ δ,
(1) Ur = f Br (x0 ) é aberto;
(2) f : Br (x0 ) → Ur é bijetiva.
Se y1 ∈ Ur ∩ f (K), existe um único x1 ∈ Br (x0 ) ∩ K tal que
y1 = f (x1 ). Analogamente, se y2 ∈ Ur ∩ f (K)c , existe um único
x2 ∈ Br (x0 ) ∩ K c tal que y2 = f (x2 ). Logo,
Br (x0 ) ∩ K 6= ∅ e
Br (x0 ) ∩ K c 6= ∅,
o que significa dizer que x0 ∈ ∂K e, consequentemente, y0 ∈ f (∂K).
Portanto, ∂f (K) ⊂ f (∂K) e a conclusão da prova segue do Corolário 12.9, visto que ∂K é um conjunto compacto que, por hipótese,
tem conteúdo nulo.
Observação: Os resultados acima valem para o caso f : Ω → Rn ,
com Ω ⊂ Rn aberto e A limitado tal que A ⊂ Ω. De fato, consideremos a cobertura {IIx }x∈A , onde cada I x é um n-pavê com centro em
x e inteiramente contido em Ω. Sendo A compacto, existe uma subcobertura finita {IIxi }i , i = 1, . . . , m e podemos aplicar os argumentos
usados nas provas anteriores em cada um dos conjuntos A ∩ I xi .
A integral de Riemann
Vamos inicialmente definir a integral de Riemann para funções f
limitadas e definidas num n-pavê I e, a seguir, estender a definição
para conjuntos J-mensuráveis.
A integral de Riemann em R
n
207
Seja Ium n-pavê e f : I → R função limitada. Seja P uma partição
de I e I 1 , . . . , I m a famı́lia de n-pavês gerada por P . Para cada
j = 1, . . . , m, considere
(12.2)
Mj = sup f (x) ; x ∈ I j , mj = inf f (x) ; x ∈ I j .
Consideremos também os números
L(f, P ) =
m
X
mj µ(IIj ),
U (f, P ) =
j=1
m
X
Mj µ(IIj ).
j=1
L(f, P ) e U (f, P ) são denominados soma inferior e soma superior de
Riemann de f relativas a P . É claro que L(f, P ) ≤ U (f, P ) para
toda P ∈ P(II ). É claro também (verifique!) que se P ′ ⊃ P , então
L(f, P ′ ) ≥ L(f, P ) e
Sejam
L
U
Z
ZI
I
U (f, P ′ ) ≤ U (f, P ).
f = sup L(f, P ) ; P ∈ P(II ) ,
f = inf U (f, P ) ; P ∈ P(II ) ,
que denominaremos respectivamente integral inferior e integral superior de Riemann de f em I .
Definição 12.11: Seja f : I → R função limitada. Dizemos que f é
Riemann integrável em I (e denotamos f ∈ R(II )) se
Z
Z
L f = U f.
I
I
Este valor comum é denominado integral de Riemann de f em I e
denotado por
Z
Z
f ou
f (x) dx.
I
I
Teorema 12.12: Seja f : I → R função limitada. Então f ∈ R(II )
se, e somente se, ∀ε > 0 existe Pε ∈ P(II ) tal que
U (f, P ) − L(f, P ) < ε,
∀P ⊃ Pε .
(12.3)
208
Cálculo Avançado I
Prova: Se f ∈ R(II ), seja
l=L
Z
f =U
I
Z
f.
I
Por definição, dado ε > 0, existem Pε1 e Pε2 partições de I tais que
l−
ε
ε
< L(f, Pε1 ) ≤ l ≤ U (f, Pε2 ) < l + .
2
2
Seja Pε = Pε1 ∪ Pε2 e P ⊃ Pε . Então
l−
ε
ε
< L(f, P ) ≤ l ≤ U (f, P ) < l + ,
2
2
de onde se conclui (12.3).
Reciprocamente, se f não é Riemann integrável em I , então
Z
Z
l1 = L f < l2 = U f.
I
I
Se ε0 = l2 − l1 , é claro que
L(f, P ) ≤ l1 < l2 ≤ U (f, P ),
∀P ∈ P(II ),
de onde se conclui que U (f, P ) − L(f, P ) ≥ ε0 , ∀ P ∈ P(II ).
Corolário 12.13: Seja f : I → R função contı́nua. Então f ∈ R(II ).
Prova: Como I é compacto, f é limitada e uniformemente contı́nua,
de modo que dado ε > 0, existe δ > 0 tal que
kx − yk < δ
⇒
|f (x) − f (y)| <
ε
.
µ(II )
Sejam P ∈ P(II ) tal que |P | < δ e I 1 , . . . , I m a famı́lia de n-pavês
gerada por P . Então existem xj , yj ∈ I j tais que Mj = f (xj ) e
mj = f (yj ). Logo,
U (f, P ) − L(f, P ) =
m
X
j=1
f (xj ) − f (yj ) µ(IIj ) < ε
A integral de Riemann em R
n
209
e a conclusão segue do Teorema 12.12.
Teorema 12.14: Seja f : I → R função limitada e A o conjunto dos
pontos de descontinuidade de f . Se c(A) = 0, então f ∈ R(II ).
Prova: Seja M > 0 tal que |f (x)| ≤ M para todo x ∈ I . Por
hipótese, dado ε > 0, existe Pε ∈ P(II ) tal que J(A, Pε ) < ε/4M .
Seja I = {II1 , . . . , I m } a famı́lia de n-pavês gerada por Pε e
[
B=
Ij,
j∈Cat3 (A,Pε )
isto é, B é a união dos n-pavês que não inteceptam A. Como f é
contı́nua e B é compacto, existe δ > 0 tal que se x, y ∈ B e kx − yk <
δ, então |f (x) − f (y)| < ε/2µ(II ).
Tomemos Peε ⊃ Pε tal que |Peε | < δ e seja Ie = Ie1 . . . , Iel a famı́lia
de n-pavês gerada por Peε . Sejam
Então,
Ie1 = Iej ; Iej ⊂ B
U (f, Peε ) − L(f, Peε ) =
X
Ie2 = Ie \ Ie1 .
e
fj − m
e j )µ(Iej ) +
(M
X
fj − m
e j )µ(Iej )
(M
e
eI j ∈e
I j ∈e
I1
I2
X
X
ε
<
µ(Iej ) + 2M
µ(Iej ) < ε.
2µ(II )
e
e
I j ∈e
I1
I j ∈e
I2
Portanto, f é Riemann integável em I .
O teorema acima nos dá uma condição suficiente para a integrabilidade de f em função do conjunto de seus pontos de descontinuidade.
Por outro lado, é fácil ver que a função de Dirichlet
2
f : [0, 1] → R,
f (x, y) =
1 se x, y ∈ Q,
0 senão,
não é Riemann-integrável em [0, 1]2 . Assim, a pergunta natural que se
coloca é: podemos obter uma caracterização sobre a integrabilidade
210
Cálculo Avançado I
de f em função do conjunto dos seus pontos de descontinuidade? A
resposta está no resultado que segue.
Definição: Dizemos que A ⊂ Rn tem medida zero se, para todo ε >
0, existe uma famı́lia enumerável {II1 , I 2 , . . .} de n-pavês satisfazendo
as seguintes condições:
A⊂
∞
[
Ij
e
j=1
∞
X
c(IIj ) < ε.
j=1
Se A tem medida zero, denotamos m(A) = 0.
Teorema 12.15: Sejam I um n-pavê de Rn , f : I → R função
limitada e A o conjunto dos pontos de descontinuidade de f . Então
f ∈ R(II ) se, e somente se, m(A) = 0.
Prova: Denotemos I = [a1 , b1 ] × · · · × [an , bn ] e M > 0 tal que
|f (x)| ≤ M para todo x ∈ I .
Se m(A) = 0, dado ε > 0 existe {II1 , I 2 , . . .} uma famı́lia enumerável
de n-pavês tal que (veja Exercı́cio 12.6)
A⊂
∞
[
◦
Ij
e
j=1
∞
X
j=1
◦
c Ij <
ε
.
2(M + c(II ))
Por outro lado, para cada x ∈ I \ A, existe δx > 0 tal que se y ∈ I ,
ky − xk∞ < δx
⇒
|f (y) − f (x)| <
ε
.
2(M + c(II ))
Assim, para cada x ∈ I \ A, denotemos
I x = y ∈ I ; ky − xk∞ ≤ δx /2 .
É claro que
◦ ◦
◦
I 1, I 2, . . . ∪ I x ; x ∈ I \ A
é uma cobertura aberta de I . Logo, existem j1 , . . . , jm e x1 , . . . , xk
tais que
◦
◦
◦
◦
I ⊂ I j1 ∪ · · · ∪ I jm ∪ I x1 ∪ · · · ∪ I xk .
A integral de Riemann em R
É óbvio que
m
X
i=1
e é claro também que
|f (y) − f (y ′ )| <
n
◦ c I ji <
ε
,
(M + c(II ))
211
ε
2(M + c(II ))
(12.4)
◦
∀y, y ′ ∈ I ∩ I xj ,
j = 1, . . . , k.
(12.5)
Como I ∩ I j e I ∩ I xj são n-pavês, denotemos
I ∩ I ji = [alji , b1ji ] × · · · × [anji , bnji ],
I ∩ I xj = [α1j , βj1 ] × · · · × [αnj , βjn ].
O conjunto de números reais
l
,
Pl = alj1 , . . . , aljm , b1j1 , . . . , bljm , αl1 . . . , αlm , β1l , . . . , βm
quando ordenado, define uma partição do intervalo [al , bl ], de forma
que P = P1 × · · · × Pn é uma partição de I . Seja I = Ie1 , . . . , Iep
a famı́lia de n-pavês gerada por P e consideremos a seguinte decomposição de I:
I ′ = Ieq ∈ I ; Ieq ⊂ I ∩ I ji , para algum ji ,
I ′′ = Ieq ∈ I ; Ieq ⊂ I ∩ I x , para algum xj ,
j
Então,
U (f, P ) − L(f, P ) =
=
p
X
q=1
(Mq − mq )c(Ieq )
X
Ieq ∈I ′
(Mq − mq )c(Ieq ) +
X
Ieq ∈I ′′
(Mq − mq )c(Ieq )
Segue de (12.4) e (12.5):
X
X
(Mq − mq )c(Ieq ) ≤ 2M
c(Ieq ),
Ieq ∈I ′
Ieq ∈I ′
X
X
ε
(Mq − mq )c(Ieq ) ≤
c(Ieq ).
M + c(II )
Ieq ∈I ′′
Ieq ∈I ′′
212
Como
Cálculo Avançado I
X
Ieq ∈I ′
X
Ieq ∈I ′′
c(Ieq ) ≤
c(Ieq ) ≤
m
X
i=1
k
X
c(If
ji ) <
ε
,
2(M + c(II ))
c(IIxi ) < c(II ),
i=1
concluı́mos que U (f, P ) − L(f, P ) < ε.
Reciprocamente, seja A ⊂ I o conjunto dos pontos de descontinuidade de f e consideremos, para cada m ∈ N,
Am = x ∈ I ; ω(f, x) ≥ 1/m ,
onde ω(f, x) denota a oscilação de f em x relativamente à norma
k k∞ (veja Definição 4.11). Pelo Teorema 4.12, é claro que
A=
∞
[
Am .
(12.6)
m=1
Para provar que m(A) = 0, é suficiente mostrar que cada Am tem
conteúdo de Jordan nulo. Então fixemos m. Como f é integrável em
I , dado ε > 0, existe Pε partição de I tal que
ε
U (f, P ) − L(f, P ) < , ∀P ⊃ Pε .
m
Fixemos P ⊃ Pε e consideremos {II1 , . . . , I k } a famı́lia de n-pavês
gerada por P . Consideremos também os seguintes conjuntos:
Bm = x ∈ Am ; x ∈ ∂IIj , j = 1, . . . , , k , Cm = Am \ Bm .
É claro que c(Bm ) = 0, pois (veja Exercı́cio 12.6)
Bm ⊂ ∂II1 ∪ · · · ∪ ∂IIk .
◦
Provemos então que c(Cm ) = 0. Se x ∈ Cm , então x ∈I j para algum
◦
1 ≤ j ≤ k e podemos escolher δ > 0 tal que Bδ (x) ⊂I j , onde Bδ (x)
denota a bola aberta com centro em x, relativa à norma k k∞ . Então,
1
≤ ω(f, x) ≤ sup f Bδ (x) − inf f Bδ (x) ≤ Mj − mj .
m
(12.7)
A integral de Riemann em R
n
213
Sejam I j1 , . . . , I jl os n-pavês em cujos interiores existem pontos de
Cm . Então, de (12.7),
l
1 X
ε
c(IIji ) ≤ U (f, P ) − L(f, P ) < .
m i=1
m
Assim, vemos que
Cm ⊂ I j1 ∪ · · · ∪ I jl
e
l
X
c(IIji ) < ε,
i=1
isto é, c(Cm ) = 0. A conclusão da prova segue de (12.6) e do Exercı́cio 12.6(3).
Dada uma partição P de I , seja I 1 , . . . , I m a famı́lia de n-pavês
gerada por P . Para cada xj ∈ I j , definimos a soma de Riemann de
f nos pontos xj por
m
X
S f, P, {x1 , . . . , xm } =
f (xj )µ(IIj ).
j=1
Teorema 12.16: Seja f : I → R função limitada. Então f ∈ R(II )
se, e somente se, existe l ∈ R satisfazendo a seguinte propriedade:
Para todo ε > 0, existe Pε ∈ P(II ) tal que se P ⊃ Pε e
{II1 , . . . , I m } é a famı́lia gerada por P , então
|S f, P, {x1 , . . . , xm } − l| < ε
(12.8)
qualquer que seja xj ∈ I j , j = 1, . . . , m.
R
Prova: Se f ∈ R(II ), seja l = I f . Dado ε > 0, existe Pε ∈ P(II )
tal que
U (f, P ) − L(f, P ) < ε, ∀P ⊃ Pε .
Se P ⊃ Pε , então
−ε < L(f, P ) − l ≤ U (f, P ) − l < ε.
214
Cálculo Avançado I
Como
L(f, P ) ≤ S f, P, {x1 , . . . , xm } ≤ U (f, P ),
qualquer que seja a escolha de xj ∈ I j , tem-se
Portanto,
S f, P, {x1 , . . . , xm } − l ≤ U (f, P ) − l < ε,
S f, P, {x1 , . . . , xm } − l ≥ L(f, P ) − l > −ε.
|S f, P, {x1, . . . , xm } − l| < ε.
Reciprocamente, suponha que vale a propriedade (12.8). De (12.2)
obtemos
Mj − mj = sup f (x) − f (y) ; x, y ∈ I j ,
de modo que se ν < ε/µ(II ), existem xj , yj ∈ I j tais que
Mj − mj − ν < f (xj ) − f (yj ) ≤ Mj − mj .
Logo,
m
X
j=1
m
X
f (xj ) − f (yj ) µ(IIj ) ≥
(Mj − mj − ν)µ(IIj )
j=1
= U (f, P ) − L(f, P ) − νµ(II )
(12.9)
> U (f, P ) − L(f, P ) − ε.
Por outro lado, como
m
X
j=1
f (xj ) − f (yj ) µ(IIj )
segue de (12.8),
= S f, P, {x1 , . . . , xm } − S f, P, {y1, . . . , ym }
|S f, P, {x1 , . . . , xm } − S f, P, {y1, . . . , ym } | < 2ε.
(12.10)
Assim, de (12.9) e (12.10) concluı́mos que U (f, P ) − L(f, P ) < 3ε.
n
A integral de Riemann em R
215
R
R
Para concluir que l = I f , suponhamos ε = l − I f > 0. Por
hipótese, existe uma partição Pε1 tal que qualquer partição P ⊃ Pε1
satisfaz
S f, P, {x1, . . . , xm } > l − ε.
Como f ∈ R(II ), existe uma partição Pε2 tal que
U (f, P ) <
Z
f + ε,
I
∀P ⊃ Pε2 .
Então, para P ⊃ Pε1 × Pε2 , obtemos
o que é absurso.
U (f, P ) < S f, P, {x1, . . . , xm } ,
O mesmo argumento leva a um absurdo se
R
I
f − l > 0.
Agora estamos em condições de estender a integral de Riemann
para funções definidas em conjuntos J-mensuráveis.
Seja A um conjunto J-mensurável e f : A → R uma função limitada. Consideremos I um n-pavê tal que I ⊃ A. Seja fe : I → R a
função definida por
fe(x) =
n
f (x) se x ∈ A,
0
senão.
fe é denominada a extensão nula de f em I .
Definição 12.17: Dizemos que f é Riemann integrável em A (e
escrevemos f ∈ R(A)) se fe é Riemann integrável em I e, neste caso,
definimos
Z
Z
f = fe.
A
I
Deixamos como exercı́cio ao leitor verificar que
escolha de I .
R
A
f independe da
Teorema 12.18: Seja A ⊂ Rn conjunto J-mensurável e f : A → R
limitada e contı́nua em todos os pontos do interior de A. Então
f ∈ R(A).
216
Cálculo Avançado I
◦
Prova: Vamos supor inicialmente A6= ∅. Sejam I um n-pavê tal
◦
que I ⊃ A e fe : I → R a extensão nula de f em I . É claro que fe
◦
◦
é contı́nua em I \A e, por hipótese, fe é contı́nua en A. Se B é o
conjunto dos pontos de descontinuidade de fe, então
◦
◦ c
B ⊂ (I \A)∪ A .
◦
Seja x0 ∈ B. Então x0 ∈
/ A, o que significa que para todo r > 0,
Br (x0 ) ∩ Ac 6= ∅.
(12.11)
◦
Por outro lado, x0 ∈
/ I \A signifca que x0 ∈ A e, portanto,
Br (x0 ) ∩ A 6= ∅, ∀r > 0.
(12.12)
Segue de (12.11) e (12.12) que x0 pertence à fronteira de A, isto é, B ⊂
∂A. Como estamos supondo A J-mensurável, segue do Teorema 12.7
que
c(B) ≤ c(∂A) = 0.
Com argumentos análogos (verifique), mostra-se que (12.11) e (12.12)
◦
também valem se A= ∅. A conclusão segue do Teorema 12.14.
Teorema 12.19: Seja A ⊂ Rn conjunto J-mensurável, f, g ∈ R(A).
Então:
R
R
R
(a) f ± g ∈ R(A) e A (f ± g) = A f ± A g;
R
R
(b) ∀c ∈ R, cf ∈ R(A) e A cf = c A f ;
R
(c) se f ≥ 0 então A f ≥ 0. Em particular, se f ≤ g, então
Z
Z
f≤
g.
A
A
R
R
(d) |f | ∈ R(A) e A f ≤ A |f |.
(e) se A = A1 ∪ A2 com A1 e A2 J-mensuráveis tais que c(A1 ∩ A2 ) =
0, então
Z
Z
Z
f=
A
f+
A1
f.
A2
A integral de Riemann em R
n
217
(f) se m ≤ f (x) ≤ M para todo x ∈ A e g ≥ 0, então existe λ ∈
[m, M ] tal que
Z
Z
fg = λ
g
(12.13)
A
A
Além disso, se f é contı́nua e A é compacto e conexo, então existe
x0 ∈ A tal que λ = f (x0 ), isto é,
Z
Z
f g = f (x0 )
g.
(12.14)
A
A
Prova: Os itens (a), (b) e (c) são imediatos (verifique!).
Provemos (d). Seja I ⊂ Rn um n-pavê tal que A ⊂ I e fe a extensão
nula de f em I . Então fe ∈ R(II ). Seja B ⊂ I o conjunto dos pontos
e o
de descontinuidade de fe. Pelo Teorema 12.15, m(B) = 0. Seja B
conjunto dos pontos de descontinuidade de |fe|. Como
|fe(x)| − |fe(y)| ≤ |fe(x) − fe(y)| ∀x, y ∈ I ,
e ⊂ B. Logo, m(B)
e = 0, o que implica |fe| ∈ R(II ) e,
é claro que B
consequentemente, |f | ∈ R(A). Pelo item (a), f ± |f | ∈ R(A) e como
f + |f | ≥ 0 e f − |f | ≤ 0, a conclusão segue do item (c).
Para provar (e), considere a função F : A → R definida por
n
F (x) = f (x) se x ∈ A1 ,
0
senão.
Então f ∈ R(A) e
Z
Z
Z
Z
Z
f=
F + (f − F ) =
F + (f − F ) =
A
A
A
A
f+
A1
Z
f.
A2
Provemos o item (f). Sejam N = sup{g(x) ; x ∈ A}, I um npavê tal que I ⊃ A e fe, e
g as extensões nulas de de f e g em I ,
respectivamente. Então, é evidente que ffg = fee
g . Dado ε > 0,
existem Pε1 e Pε2 partições de I tais que
ε
U (fe, P ) − L(fe, P ) <
,
2N
ε
U (e
g , P ) − L(e
g, P ) <
,
2M
∀P ⊃ Pε1 ∪ Pε2 .
218
Cálculo Avançado I
Seja {II1 , . . . , I m } a famı́lia de n-pavês gerada por P e considere os
números
Qj = sup{fe(x) ; x ∈ I j },
Rj = sup{e
g (x) ; x ∈ I j },
Mj = sup{fe(x)e
g (x) ; x ∈ I j },
e
Então,
qj = inf{fe(x) ; x ∈ I j },
rj = inf{e
g(x) ; x ∈ I j },
mj = inf{fe(x)e
g(x) ; x ∈ I j }.
Mj − mj = Qj (Rj − rj ) + rj (Qj − qj )
≤ M (Rj − rj ) + N (Qj − qj )
de onde se conclui que U (ffg, P ) − L(ffg, P ) < ε. Logo, f g ∈ R(A).
Como mg(x) ≤ f (x)g(x) ≤ M g(x), para todo x ∈ A, segue do item
(c) que
Z
Z
Z
m
A
f≤
A
fg ≤ M
g.
(12.15)
A
R
R
Se A g = 0, a igualdade em (12.13) vale para qualquer λ. Se A g 6= 0,
seja
R
fg
λ = RA
g
A
e (12.13) segue de (12.15). Em particular, se f é contı́nua e A é
compacto conexo, então f (A) = [m, M ] e a conclusão segue do Teorema 4.18.
Seja A ⊂ Rn . A função χA : Rn → R definida por
χA (x) =
1 se x ∈ A,
0 senão,
é denominada função caracterı́stica de A.
Corolário 12.20: Seja A ⊂ Rn um subconjunto limitado de Rn .
Então A é J-mensurável, se, e somente se, χA é Riemann integrável.
Neste caso,
Z
χA = c(A).
A
A integral de Riemann em R
n
219
Como calcular integrais?
O Teorema Fundamental do Cálculo nos permite calcular integrais
definidas em R quando conhecemos a primitiva da função integrando.
Mais precisamente, se F (s) é uma primitiva de f (s), então sabemos
que
Z b
f (s) ds = F (b) − F (a).
a
Este resultado fundamental pode ser aplicado no cálculo de integrais em Rn , no que usualmente se denomina integração iterada, consequência do Teorema de Fubini. No que segue, vamos nos restringir
ao caso bidimensional; o caso geral segue por indução.
Teorema 12.21: Seja I = [a, b] × [c, d] um 2-pavê e f : I → R uma
função contı́nua. Então
#
#
Z b "Z d
Z d "Z b
Z
f=
f (t, s) ds dt =
f (t, s) dt ds.
I
a
c
c
a
Prova: Dado ε > 0, existe Pε = Pε1 × Pε2 ∈ P(II ) tal que se P ⊃ Pε ,
então
Z
ε
S(f, P, {x1, . . . , xm }) − f < ,
(12.16)
2
I
quaisquer que sejam xi ∈ I i , i = 1, . . . , m, onde {II, . . . , I m } é a
famı́lia gerada por P .
Para cada t ∈ [a, b], a aplicação s 7→ f (t, s) é contı́nua em [c, d]
e, portanto, integrável nesse intervalo. Seja F : [a, b] → R a função
definida por
Z d
F (t) =
f (t, s) ds.
c
Como F é contı́nua em [a, b], segue dos Teoremas 12.13 e 12.16 (no
caso n = 1) que F é integrável e existe P1 ∈ P([a, b]) (que, sem
perda
1
de generalidade, podemos supor P1 ⊃ Pε ) tal que se P1 = a = t0 <
t1 < · · · < tk = b , tem-se
S F, P1 , {ξ1 , . . . , ξk } −
Z
b
F (t) dt <
a
ε
2
(12.17)
220
Cálculo Avançado I
quaisquer que sejam ξi ∈ [ti−1 , ti ], i = 1, . . . , k.
Seja P2 = c = s0 < s1 < · · · < sl = d uma partição de [c, d] com
P2 ⊃ Pε2 . Como a aplicação s 7→ f (ξi , s), i = 1, . . . , k é contı́nua,
segue de (12.14), que existe νij ∈ [sj−1 , sj ] tal que
F (ξi ) =
l Z
X
sj
f (ξi , s) ds =
sj−1
j=1
l
X
f (ξi , νij )∆sj .
j=1
Logo,
k X
l
X
f (ξi , νij )∆sj .
S F, P1 , {ξ1 , . . . , ξk } =
i=1 j=1
Assim, P = P1 × P2 é uma partição de I com P ⊃ Pε , que gera a
famı́lia de 2-pavês
I 11 , I 12 , . . . , I kl ,
onde I ij = [ti−1 , ti ] × [sj−1 , sj ], i = 1, . . . , k e j = 1, . . . , l.
Como xij = (ξi , νij ) ∈ I ij , temos
S F, P1 , {ξ1 , . . . , ξk } = S f, P, {x11, . . . , xkl } .
(12.18)
Portanto, de (12.16), (12.17) e (12.18), obtemos
Z
I
f−
Z
a
Z
b
F (t) dt ≤
I
f − S f, P, {x11, . . . , xkl }
+ S F, P1 , {ξ1 , . . . , ξk } −
Z
b
a
Como ε > 0 foi tomado arbitrariamente, conclui-se que
#
Z
Z
Z "Z
b
f=
I
b
d
F (t) dt =
f (t, s) ds dt.
a
a
Por argumento análogo, mostra-se que
Z
Z "Z
d
b
f=
I
c
#
f (t, s) dt ds.
c
a
F (t) dt < ε.
A integral de Riemann em R
n
221
Observação: A hipótese de continuidade da f no teorema acima
não é necessária, mas não podemos simplesmente substituı́-la por
f ∈ R(II ), visto que as integrais parciais
Z
Z
b
f (t, s) dt,
a
d
f (t, s) ds,
c
podem não estar definidas para todo s e para todo t. Por outro lado,
mesmo que essas integrais existam e que
Z
a
b
"Z
#
d
f (t, s) ds dt =
c
Z
d
c
"Z
#
b
f (t, s) dt ds,
a
não podemos garantir que f seja Riemann integrável em [a, b] × [c, d]
(veja Exercı́cios). O seguinte resultado oferece uma condição suficiente um pouco mais geral para que a integral de f possa ser calculada via integrais iteradas.
Teorema 12.22: Seja I = [a, b] × [c, d] um 2-pavê e f : I → R uma
função limitada e contı́nua em I \ B, com c(B) = 0. Se existe um
número p ∈ N tal que toda reta vertical intercepta B em no máximo
p pontos, então
Z
I
f=
Z
b
a
"Z
#
d
f (t, s) ds dt.
c
Prova: Seja M = sup |f (x)| ; x ∈ I e ε > 0. Então:
(1) Como c(B) = 0, existe Pε ∈ P(II ) tal que
J(B, P ) ≤
ε
,
4M
∀P ⊃ Pε .
(12.19)
(2) Pelo Teorema 12.14, f ∈ R(II ), de modo que existe Peε ∈ P(II )
tal que se P ⊃ Peε , então
S f, P, {x1 , . . . , xm } −
Z
I
f <
ε
,
2
(12.20)
222
Cálculo Avançado I
quaisquer que sejam xi ∈ I i , i = 1, . . . , m, onde {II1 , . . . , I m } é a
famı́lia gerada por P .
(3) Para todo t ∈ [a, b], a aplicação s 7→ f (t, s) possui no máximo
p pontos de descontinuidade, de modo que a função F : [a, b] → R,
F (t) =
Z
d
f (t, s) ds
c
está bem definida.
Consideremos então:
(
P1 = a = t0 < t1 < · · · < tk = b
P2 = c = s 0 < s 1 < · · · < s l = d
partições de [a, b] e [c, d] respectivamente, tais que P = P1 × P2 seja
um refinamento de Pε ∪ Peε . Seja S(F, P1 , {ξ1 , . . . , ξk }) uma soma de
Riemann de F relativamente à partição P1 , com ξi ∈ [ti−1 , ti ]. Então,
para cada i = 1, . . . , k, temos
F (ξi ) =
Z
d
f (ξi , s) ds =
c
l Z
X
j=1
sj
f (ξi , s) ds
sj−1
Seja I 11 , . . . , I kl a famı́lia gerada por P . Por hipótese, f é
contı́nua em cada um dos pavês que não intercepta B. Vamos separálos em duas partes:
Ii1 = j ; I ij ∩ B = ∅ , Ii2 = I \ Ii1 .
Então, para cada n-pavê I ij de Ii1 podemos aplicar o Teorema do
Valor Médio (12.14), isto é, existe νij ∈ I ij tal que
Z sj
f (ξi , s) ds = f (ξi , νij )∆sj .
sj−1
Assim, para cada i = 1, . . . , k,
F (ξi ) =
X
j∈Ii1
f (ξi , νij )∆sj +
XZ
j∈Ii2
sj
sj−1
f (ξi , s) ds,
A integral de Riemann em R
n
223
de modo que
S(F, P1 , {ξ1 , . . . , ξk }) =
k
X
i=1
X
f (ξi , νij )∆sj
j∈Ii1
XZ
+
j∈Ii2
Seja
xij =
sj
sj−1
f (ξi , s) ds ∆ti .
(ξi , νij ) se j ∈ Ii1 ,
(ξi , sj ) se j ∈ Ii2 .
Então, de (12.19), obtemos
S(f, P, {x11, . . . , xkl }) − S(F, P1 , {ξ1 , . . . , ξk })
=
k X
X
f (xij ) −
i=1 j∈I 2
i
≤ 2M
k X
X
Z
sj
!
f (ξi , s) ds ∆sj ∆ti
sj−1
∆sj ∆ti = 2M J(B, P ) <
i=1 j∈I 2
i
ε
.
2
Logo,
S F, P1 , {ξ1 , . . . , ξk } −
Z
f
≤ S F, P1 , {ξ1 , . . . , ξk } − S(f, P, {x11, . . . , xkl })
Z
+ S(f, P, {x11, . . . , xkl }) − f < ε
I
I
e a conclusão segue do Teorema 12.16.
Corolário 12.23: Sejam φ1 , φ2 : [a, b] → R funções contı́nuas tais
que φ1 (t) ≤ φ2 (t) para todo t ∈ [a, b]. Considere a região A de R2
definida por
A = (t, s) ; a ≤ t ≤ b, φ1 (t) ≤ s ≤ φ2 (t) .
224
Cálculo Avançado I
Então A é J-mensurável e se f é contı́nua em A, temos
Z
f=
A
Z
b
a
"Z
φ2 (t)
#
f (t, s) ds dt.
φ1 (t)
Os resultados desta Seção se estendem de forma natural para Rn ,
com n ≥ 3. Em particular, temos
Teorema 12.24: Seja I = [a1 , b1 ] × · · · × [an , bn ] um n-pavê e f :
I → R uma função contı́nua. Então
Z
f=
I
n Z
Y
k=1
bk
f (x1 , x2 , . . . , xn ) dxk .
ak
Funções de conjunto e derivadas espaciais
Seja A uma famı́lia de conjuntos. É usual denominar-se função de
conjunto definida em A uma função F que a cada elemento A ∈ A
associa um número real F (A). É sobre este conceito básico que
desenvolve-se, por exemplo, a Teoria da Medida. Nesta seção abordaremos alguns aspectos relevantes das funções de conjunto definidas
pelo conteúdo de Jordan e pela integral de Riemann sobre conjuntos
J-mensuráveis.
Seja Ω ⊂ Rn um aberto. Considere
MJ (Ω) = A ⊂ Ω ; A é J-mensurável .
Dizemos que uma função F : MJ (Ω) → R é aditiva se, para todo
A1 , A2 ∈ MJ (Ω) tais que A1 ∪ A2 ⊂ Ω e c(A1 ∩ A2 ) = 0, tem-se
F (A1 ∪ A2 ) = F (A1 ) + F (A2 ).
Dizemos que F é monótona se A1 , A2 ∈ MJ (Ω),
A1 ⊂ A2
⇒
F (A1 ) ≤ F (A2 ).
A integral de Riemann em R
n
225
Exemplo: Sejam Ω = I um n-paralelepı́pedo aberto, f : Ω → R
Riemann-integrável e
Z
F (A) =
f, A ∈ MJ (Ω).
A
Então F é aditiva e se f ≥ 0, F é monótona. Observe que se f ≡ 1,
então a função conteúdo de Jordan A 7→ c(A) é aditiva e monótona.
Definição 12.25: Sejam F : MJ (Ω) → R, l ∈ R e x0 ∈ Ω. Dizemos
que l é o limite de F em x0 se dado ε > 0, existe δ > 0 tal que,
qualquer que seja I n-pavê contendo x0 , tem-se
diam(II ) < δ
⇒
|F (II ) − l| < ε.
Se l é o limite de F em x0 , denotamos
lim F (II ) = l.
I ↓x0
Se F admite limite em cada ponto x ∈ Ω, podemos considerar a
função f : Ω → R por
f (x) = lim F (II ).
I ↓x
Definição 12.26: Seja B ⊂ Ω. Dizemos que
f (x) = lim F (II )
I ↓x
é uniforme em B, se para todo x ∈ B e para todo ε > 0, existe δ > 0
independente de x tal que, qualquer que seja o n-pavê I contendo x,
tem-se
diam(II ) < δ ⇒ |F (II ) − g(x)| < ε.
Definição 12.27: Uma função F : MJ (Ω) → R é diferenciável em
x0 ∈ Ω se existe l ∈ R tal que
lim
I ↓x0
F (II )
= l.
c(II )
(12.21)
226
Cálculo Avançado I
Neste caso dizemos que l é a derivada espacial de F em x0 e denotamos l = F ′ (x0 ). Dizemos que F é uniformemente diferenciável em
B ⊂ Ω se o limite (12.21) é uniforme em B.
Os próximos dois Teoremas generalizam o Teorema Fundamental
do Cálculo.
Teorema 12.28: Sejam Ω ⊂ Rn aberto e f : Ω → R uma função
contı́nua. Considere F : MJ (Ω) → R definida por
F (A) =
Z
f.
A
Então F é uniformemente diferenciável em qualquer n-pavê I ⊂ Ω e
F ′ (x) = f (x) para todo x ∈ Ω.
Prova: Seja I ⊂ Ω um n-pavê. Como f é uniformemente contı́nua
em I , dado ε > 0, existe δ > 0 tal que
|f (x) − f (y)| <
ε
,
2
∀x, y ∈ I com kx − yk∞ < δ.
Fixe x0 ∈ I e considere I d ⊂ I um n-pavê contendo x0 tal que
diam(IId ) = d < δ. Seja
M = max f (x) ; x ∈ I d
Então,
|M − f (x0 )| ≤
ε
2
Como
mc(IId ) ≤
obtemos
e
e
Z
Id
m = min f (x) ; x ∈ I d .
|m − f (x0 )| ≤
ε
.
2
f ≤ M c(IId ),
F (IId )
− f (x0 ) ≤ ε.
c(IId )
Como x0 foi tomado arbitrariamente em I e δ não depende de x0 ,
concluı́mos que F é uniformemente diferenciável em I e F ′ (x0 ) =
f (x0 ).
A integral de Riemann em R
n
227
Teorema 12.29: Seja F : MJ (Ω) → R função aditiva. Se F é
uniformemente diferenciável no n-pavê I 0 ⊂ Ω e f (x) = F ′ (x) para
todo x ∈ I 0 , então f é contı́nua em I 0 e
F (II ) =
Z
I
f,
para todo n-pavê I ⊂ I 0 .
Prova: Por hipótese, dado ε > 0, existe δ > 0 tal que, qualquer que
seja x ∈ I 0 e qualquer que seja o n-pavê I contendo x, se diam(II ) < δ,
então
F (II )
ε
− f (x) < .
c(II )
2
√
Sejam x1 , x2 ∈ I 0 tais que kx1 − x2 k2 < δ/ n. Seja x0 = (x1 + x2 )/2
e I d o n-cubo com centro em x0 e diâmetro d = δ. Então, x1 , x2 ∈ I d
e
|f (x1 ) − f (x2 )| ≤
F (IId )
F (IId )
− f (x1 ) +
− f (x2 ) < ε.
c(IId )
c(IId )
◦
Logo, f é uniformemente contı́nua em I 0 . Seja F0 : MJ (I 0 ) → R a
função de conjuntos definida por
F0 (A) =
Z
f.
A
Pelo Teorema 12.28, F0 é uniformemente diferenciável em I , qualquer
◦
que seja I ⊂I 0 e
F0′ (x) = f (x),
◦
para todo x ∈I 0 .
◦
Considere G(A) = F (A) − F0 (A), A ∈ MJ (I 0 ). É claro que G é
◦
aditiva e uniformemente diferenciável em todo n-pavê I ⊂I 0 com
derivada espacial G′ (x) = 0. Portanto, dado ε > 0, seja δ > 0 tal que
G(II )
< ε,
c(II )
(12.22)
228
Cálculo Avançado I
◦
para todo n-pavê I contido em I 0 com diam(II ) < δ. Fixe um npavê
I ⊂ I 0 e considere P uma partição de I que gera a famı́lia
I 1 , . . . , I m de n-pavês satisfazendo a seguinte propriedade:
I =
m
[
j=1
Ij,
diam(IIj ) < δ, ∀j,
◦
◦
I i ∩ I j = ∅, se i 6= j.
Por (12.22), |G(IIj )| < εc(IIj ) para cada j = 1, . . . , m e como G é
aditiva,
m
X
|G(II )| ≤
|G(IIj )| < εc(II ).
j=1
Sendo ε > 0 arbitrário, concluı́mos que G(II ) = 0 e, consequentemente, F (II ) = F0 (II ). Com isso, demonstramos que
Z
F (II ) = f, ∀II ⊂ I 0 .
I
Corolário 12.30: Seja F : MJ (Ω) → R satisfazendo as condições
do Teorema 12.29. Se F é monótona, então f é contı́nua em Ω
Z
F (A) =
f, ∀A ∈ MJ (Ω) tal que A ⊂ Ω.
A
Prova: Seja A ⊂ MJ (Ω) e considere (veja Exercı́cios) uma sequência
{Aj }j de conjuntos elementares satisfazendo a seguinte propriedade:
Aj ⊂ Aj+1 ⊂ A, ∀j ∈ N e
lim c(Aj ) = c(A).
j→∞
Como F é monótona, F (Aj ) ≤ F (A). Repetindo a notação do Teorema 12.29, temos
Z
F (Aj ) = F0 (Aj ) =
f.
Aj
Logo,
lim
j→∞
Z
Aj
f ≤ F (A).
A integral de Riemann em R
n
229
Como f é contı́nua em A, considere M = max{|f (x)| ; x ∈ A}. Então
Z
A
f−
Portanto,
Z
Aj
f ≤ M c(A \ Aj ) = M c(A) − c(Aj ) → 0, j → ∞.
Z
A
f ≤ F (A).
(12.23)
Repetindo o argumento com uma sequência {Aj }j de conjuntos elementares tal que
Aj ⊃ Aj+1 ⊃ A, ∀j ∈ N e
lim c(Aj ) = c(A),
j→∞
obtemos a desigualdade reversa em (12.23).
Mudança de variáveis
O principal resultado desta seção é o teorema que estabelece a
fórmula de mudança de variáveis para integrais em Rn , estendendo
o bem conhecido método de substituição do cálculo de integrais de
uma variável.
Lema 12.31: Seja I um n-paralelepı́pedo e T : Rn → Rn uma
transformação linear invertı́vel. Então
c T (II ) = | det T |c(II ).
A demonstração deste lema é elementar nos casos n = 2 e n = 3, mas
bastante técnica no caso geral e, por isso, não será aqui apresentada.
É claro que se A é um conjunto elementar, segue da aditividade da
função A 7→ c(A) que
c T (A) = | det T |c(A).
A fórmula acima se estende facilmente para conjuntos J-mensuráveis,
como demostra-se no lema a seguir.
230
Cálculo Avançado I
Lema 12.32: Seja A um conjunto J-mensurável e T : Rn → Rn uma
transformação linear invertı́vel. Então T (A) é J-mensurável e
c T (A) = | det T |c(A).
Prova: Primeiramente, observe que o Teorema 12.8 nos garante que
T (A) é J-mensurável. De fato, ∂A é compacto
e de conteúdo nulo e
T é obviamente Lipschitz. Logo, c T (∂A) = 0.
Consideremos {An }n∈N uma sequência de conjuntos elementares
tal que (veja Exercı́cios)
An ⊂ An+1 ⊂ A,
∀n ∈ N e
lim c(An ) = c(A).
n→∞
∀n ∈ N. Como c T (An ) =
Então, T (An ) ⊂ T (An+1 ) ⊂ T (A),
| det T |c(An ), obtemos
| det T |c(A) ≤ c(T (A)).
(12.24)
Analogamente, considerando {Bn }n∈N uma famı́lia de conjuntos elementares tal que
Bn ⊃ Bn+1 ⊃ A,
∀n ∈ N
e
lim c(Bn ) = c(A),
n→∞
obtemos com argumento análogo,
| det T |c(A) ≥ c(T (A)).
(12.25)
De (12.24) e (12.25), concluı́mos a prova.
Lema 12.33: Seja Ω ⊂ Rn aberto e g : Ω → Rn função de classe
C 1 tal que Jg (x) 6= 0 para todo x ∈ Ω. Seja I d (x) d>0 a famı́lia de
n-cubos com centro em x e diâmetro d. Então,
c g I d (x)
= |Jg (x)|
lim
d↓0
c I d (x)
uniformemente nos compactos de Ω.
(12.26)
A integral de Riemann em R
n
231
Prova: Como g é de classe C 1 , temos
g (x + h) = g (x) + g ′ (x)h + ǫ(x, h),
onde
kǫ(x, h)k∞
=0
khk∞
khk∞ →0
lim
(12.27)
uniformemente nos os compactos de Ω (veja Exercı́cio 5.12). Assim,
se K ⊂ Ω um compacto e ε > 0, existe δ > 0 (dependendo de K) tal
que se khk∞ < δ e x + h ∈ Ω, tem-se
kǫ(x, h)k∞ < εkhk∞ ,
∀x ∈ K.
Fixemos x0 ∈ K e seja x = x0 + h, com khk∞ < δ. Como Jg (x0 ) 6= 0,
a transformação linear T = g ′ (x0 ) é invertı́vel. Então, de (12.27),
T −1 g (x0 + h) − T −1 g (x0 ) = h + T −1 ǫ(x0 , h).
(12.28)
Seja M > 0 tal que kT −1 xk∞ ≤ M kxk∞ , para todo x ∈ Rn . Então,
para todo 0 < ε < M , segue de (12.28),
(1 − εM )khk∞ < kT −1 (g (x0 + h) − g (x0 ))k∞ < (1 + εM )khk∞ .
(12.29)
Se khk∞ ≤ r < δ, a segunda desigualdade acima implica que
T −1 g Br (x0 ) ⊂ B(1+εM )r T −1 g (x0 ) ,
de onde se conclui que
c T −1 g Br (x0 )
≤ (1 + εM )n (2r)n ,
∀r < δ.
Por outro lado, é claro que se r < δ e h ∈ Br (x0 ), tem-se
T −1 g (x0 + h) ∈ T −1 g Br (x0 ) .
(12.30)
Pelo Teorema da Função Invesa, existe r0 ≤ δ tal que T −1 g Br (x0 )
é aberto, qualquer que seja 0 < r ≤ r0 . Assim, da primeira desigualdade de (12.29), se h ∈ Br (x0 ), temos
T −1 g (x0 + h) ∈
/ B(1−εM )r T −1 g (x0 ) .
232
Cálculo Avançado I
Como T −1 g Br (x0 ) é aberto, conexo e contém T −1 g (x0 ), concluı́mos que
B(1−εM )r T −1 g (x0 ) ⊂ T −1 g Br (x0 ) ,
∀r < r0 .
Em particular, obtemos
(1 − εM )n (2r)n ≤ c T −1 g Br (x0 )
,
∀r < δ.
(12.31)
Das desiguladades (12.30) e (12.31), temos
c T −1 g Br (x0 )
(1 − εM )n ≤
c Br (x0 )
≤ (1 + εM )n ,
∀r < δ.
√
Observe que I d (x0 ) = Br (x0 ) se d = 2 nr, de modo que
c T −1 g I d (x0 )
(1 − εM ) ≤
c I d (x0 )
n
≤ (1 + εM )n ,
√
∀d < 2 nδ.
Pelo Lema 12.32, temos
c T −1 g I d (x0 )
= det T −1 c g I d (x0 ) ,
e, consequentemente, existe C = C(M ) > 0 tal que
c g I d (x0 )
− | det T | < Cε,
c(IId (x0 ))
√
∀d < 2 nδ
(12.32)
e concluı́mos a prova, pois det T = Jg (x0 ).
Observação: O limite em (12.26) nos sugere que a função de conjunto F definida sobre os n-pavês de Ω por F (II ) = c g (II ) é uniformemente derivável nos compactos de Ω, com F ′ (x) = |Jg (x)|, para
todo x ∈ Ω. A rigor, o limite restrito aos n-cubos centrados em x
não satisfaz a definição de derivada espacial, onde o limite é calculado com as “razões incrementais” envolvendo n-pavês arbitrários. O
lema seguinte justifica por que, no caso em questão, podemos nos
restringir aos n-cubos centrados em x.
A integral de Riemann em R
n
233
Lema 12.34: Nas condições do Lema 12.33, a função
de conjunto F
definida sobre os n-pavês de Ω por F (II ) = c g (II ) é uniformemente
derivável nos compactos de Ω, com F ′ (x) = |Jg (x)|, para todo x ∈ Ω.
Prova: Consideremos uma matriz diagonal D = diag(a1 , a2 , . . . , an ),
onde ai > 0 para todo i = 1, . . . , n, e a norma k kD definida por
kxkD = kDxk∞ . Então, relativamente a esta norma, a bola unitária
centrada na origem, isto é, B1 (0) = x ∈ Rn ; kxkD ≤ 1 coincide
com o n-pavê J 1 definido por J 1 = [−a1 , a1 ] × · · · × [−an , an ], cujo
diâmetro é
√ q
diam(JJ1 ) = 2 a21 + · · · + a2n .
Portanto, se Br (0) é a bola de raio r > 0 centrada na origem,
temos Br (0) = rB1 (0) = J d , onde J d é um n-pavê de diâmetro
d = r diam(JJ1 ).
Repetindo o argumento da prova do Lema 12.33 coma norma k k∞
substituı́da por k kD , obtemos que, para todo x ∈ Ω e para todo
ε > 0, existe δ1 > 0 (independente de x) tal que, se J d (x) é um
n-pavê centrado em x com diam(JJd ) = d < δ1 , então
c g (JJd (x))
ε
− |Jg (x)| < .
c(JJd (x))
2
Como g é de classe C 1 , existe δ2 > 0 tal que se x, y ∈ Ω e kx − ykD <
δ2 , tem-se
ε
|Jg (x)| − |Jg (y)| < .
2
Logo, se d < min{δ1 , δ2 } e ky − xkD ≤ d, então x ∈ J d (y) e, pela
desigualdade tringular,
c g (JJd (y))
− |Jg (x)| < ε
c(JJd (y))
(12.33)
sendo o limite acima uniforme nos compactos de Ω.
Como a escolha de D é arbitrária, (12.33) significa que F ′ (x) =
|Jg (x)| e a prova está concluı́da.
234
Cálculo Avançado I
Lema 12.35: Sejam Ω ⊂ Rn aberto e g : Ω → Rn função injetiva de
classe C 1 tal que Jg (x) 6= 0 para todo x ∈ Ω. Se K ⊂ Ω é compacto
J-mensurável, então
Z
c g (K) =
|Jg (x)| dx.
K
Prova: Pelo Tereoma 12.10, g (K) é J-mensurável. Seja G a função
de conjunto definida nos compactos K ⊂ MJ (Ω) por c g (K)
Pelo Lema 12.34, G é uniformemente derivável em todo n-pavê de
Ω e G′ (x) = |Jg (x)|. Como g é injetiva, G é aditiva e monótona.
Pelo Corolário 12.30,
Z
G(A) =
|Jg (x)| dx, ∀A ∈ MJ (Ω).
A
Em particular
G(K) = c g (K) =
Z
K
|Jg (x)| dx
e concluı́mos a prova.
Com os resultados anteriores, podemos demonstrar a fórmula de
mudança de variáveis.
Teorema 12.36: Sejam U, Ω abertos de Rn e g : U → Ω função
bijetiva de classe C 1 tal que Jg (u) 6= 0 para todo u ∈ U . Seja
f : Ω → R função contı́nua e positiva. Então, para todo K ⊂ U
compacto J-mensurável, tem-se
Z
Z
f (x) dx =
f g (u) |Jg (u)| du.
g (K)
K
Prova: Pelo Teorema 12.10, g (K) ∈ MJ (Ω) qualquer que seja
o compacto K ∈ MJ (U ). Consideremos a função de conjunto G
definida por
Z
G(K) =
f (x) dx, K ∈ MJ (U ).
(12.34)
g (K)
A integral de Riemann em R
n
235
G é aditiva (pois g é injetiva) e monótona (pois f é positiva). Seja
u0 ∈ U . Pelo Teorema do Valor Intermediário (veja (12.14)), para
cada d > 0, existe um único ud no n-pavê I d (u0 ) tal que
Z
G I d (u0 ) =
f = f g (ud ) c g (IId (u0 )
g (I
Id (u0 ))
e
c g (IId (u0 ))
G I d (u0 )
= f g (ud )
.
(12.35)
c I d (u0 )
c I d (u0 )
É claro que limd↓0 f g (ud ) = f g (u0 ) pois f ◦ g é contı́nua e ud ∈
I d (u0 ) implica ud → u0 quando d → 0. Pelo Lema 12.34, obtemos
c g (IId (u0 ))
= |Jg (u0 )|
(12.36)
lim
d↓0
c I d (u0 )
uniformemente nos compactos de U . Logo,
G I d (u0 )
′
= f g (u0 ) |Jg (u0 )|,
G (u0 ) = lim
d↓0 c I d (u0 )
∀u0 ∈ U.
Para mostrar que o limite acima é uniforme nos compactos de U ,
observe que de (12.35), obtemos
G I d (u0 )
− f g (u0 ) Jg (u0 )
c I d (u0 )
c g (IId (u0 ))
− Jg (u0 )
≤ f g (ud )
I d (u0 )
+ Jg (u0 ) f g (ud ) − f g (u0 )
(12.37)
Seja K ⊂ U compacto. Como f ◦ g é uniformemente contı́nua em
K,
(1) existem M1 > 0 tal que f g (u) ≤ M1 para todo u ∈ K;
(2) existe δ1 > 0 tal que se ku − vk < δ1 , então
f g (u) − f g (v) <
ε
.
2M1
236
Cálculo Avançado I
Como g é de classe C 1 e o limite (12.36) é uniforme em K, temos
(3) existe M2 > 0 tal que Jg (u) ≤ M2 para todo u ∈ K;
(4) existe δ2 > 0 tal que se d < δ2 , então
c g (IId (u))
ε
− Jg (u) <
,
2M2
I d (u)
∀u ∈ K.
G I d (u0 )
− f g (u0 ) Jg (u0 ) < ε,
c I d (u0 )
∀u0 ∈ K,
Assim, se δ0 = min{δ1 , δ2 } e d < δ0 , segue da desigualdade (12.37),
o que significa que G é uniformemente derivável nos compactos de U
e
G′ (u) = f g (u) |Jg (u)|.
Assim, o Corolário 12.30 nos garante
Z
f g (u) |Jg (u)| du, ∀ A ∈ MJ (U )
G(A) =
(12.38)
A
Em particular, se K é compacto, temos de (12.34) e (12.38),
G(K) =
Z
f (x) dx =
g (K)
Z
K
f g (u) |Jg (u)| du
e concluı́mos a prova.
Podemos obter um resultado semelhante ao do Teorema acima sem
a hipótese de positividade de f . De fato:
Corolário 12.37: Sejam U, Ω abertos de Rn e g : U → Ω função
bijetiva de classe C 1 tal que Jg (u) 6= 0 para todo u ∈ U . Seja
f : Ω → R função contı́nua. Então, para todo K ⊂ U compacto
J-mensurável, tem-se
Z
Z
f (x) dx =
f g (u) |Jg (u)| du.
g (K)
K
A integral de Riemann em R
n
237
Prova: Seja U1 ⊂ U aberto limitado tal que K ⊂ U1 . Seja
m = min{|f (x)| ; x ∈ g (U1 )}
Então a função h : U1 → R definida por h(x) = f (x) − m é positiva
e contı́nua em U1 . Pelo Teorema 12.36, temos
Z
f (x) dx =
g (K)
=
=
=
Z
Z
Z
h(x) dx + mc g (K)
g (K)
K
ZK
K
h g (u) |Jg (u)| du + m
Z
K
|Jg (u)| du
h g (u) + m |Jg (u)| du
f g (u) |Jg (u)| du
como querı́amos demonstrar.
Coordenadas esféricas em Rn e aplicações
As bem conhecidas coordenadas polares em R2 e coordenadas esféricas em R3 podem ser naturalmente estendidas para o Rn , n > 3.
Como nos casos elementares, elas facilitam o cálculo de integrais em
situações em que a simetria esférica se apresenta.
Lembremos que, no caso n = 3, um vetor x ∈ R3 de coordenadas
cartesianas (em relação a uma base ortonormal) (x1 , x2 , x3 ) pode ser
representado em coordenadas esféricas por
x = (ρ sen φ sen θ, ρ sen φ cos θ, ρ cos φ),
onde ρ = kxk2 , φ ∈ [0, π] e θ ∈ [0, 2π).
No caso geral, considere a região
D = [0, +∞) × [0, π]n−2 × [0, 2π]
238
Cálculo Avançado I
e a aplicação g : D → Rn , g = (g1 , . . . , gn ), assim definida: para
u = (ρ, θn−1 , θn−2 , . . . , θ1 ) ∈ D,
g1 (u) = ρ sen(θn−1 ) sen(θn−2 ) · · · sen(θ2 ) sen(θ1 ),
g2 (u) = ρ sen(θn−1 ) sen(θn−2 ) · · · sen(θ2 ) cos(θ1 ),
g3 (u) = ρ sen(θn−1 ) sen(θn−2 ) · · · cos(θ2 ),
(12.39)
..
..
..
.
.
.
gn−1 (u) = ρ sen(θn−1 ) cos(θn−2 ),
gn (u) = ρ cos(θn−1 ).
O sistema (12.39) é denominado sistema de coordenadas esféricas em
Rn . Observe que kg (u)k2 = ρ para todo u ∈ D. Além disso, g é de
classe C 1 no interior de D e pode-se mostrar que
|Jg (u)| = | det g ′ (u)| = ρn−1 senn−2 (θn−1 ) senn−3 (θn−2 ) · · · sen(θ2 ).
Para se estender as coordenadas esféricas em Rn , n > 3, vamos
proceder por indução. Seja x ∈ Rn (n > 3) um vetor não nulo, que
denotaremos por x = (x′ , xn ), onde x′ = (x1 , x2 , . . . , xn−1 ) ∈ Rn−1 .
O vetor x′ será identificado com x̃ = (x′ , 0), a projeção de x sobre o
subespaço Rn−1 × {0}. Suponhamos as fórmulas (12.39) válidas para
x′ , isto é,
x1 = r sen(θn−2 ) · · · sen(θ2 ) sen(θ1 ),
x2 = r sen(θn−2 ) · · · sen(θ2 ) cos(θ1 ),
x3 = r sen(θn−2 ) · · · cos(θ2 ),
..
..
..
.
.
.
(12.40)
xn−1 = r cos(θn−2 ).
Seja θn−1 o ângulo entre x e en , o n-ésimo vetor na base canônica
de Rn . Então,
x · en
xn
=
.
cos(θn−1 ) =
kxk2
kxk2
Denotando por ρ = kxk2 e r = kx′ k2 , obtemos
xn = ρ cos(θn−1 ).
(12.41)
A integral de Riemann em R
n
239
Por outro lado, para θn−1 ∈ [0, π] temos
sen(θn−1 ) =
s
1−
x2n
kx′ k2
=
,
kxk22
kxk2
de onde se conclui que
r = ρ sen(θn−1 ).
(12.42)
Assim, substituindo (12.42) nas equações de (12.40) e completando
com (12.41), obtemos as equações introduzidas em (12.39).
• Aplicação: o conteúdo da bola de raio R em Rn
Como exemplo, vamos usar as coordenadas esféricas para determinar fórmulas explı́citas para o contúdo de Jordan da bola de raio R
de Rn .
Seja BR a bola aberta de Rn de raio R centrada em zero. Então,
pelo Lema 12.35, temos
c(BR ) =
Z
dx =
BR
Z
DR
|Jg (u)| du,
onde DR = (0, R) × (0, π)n−2 × (0, 2π) e, a menos de um conjunto de
conteúdo zero, BR = g (DR ).
Pelo Teorema de Fubini 12.24, temos
Z
|Jg (u)| du = 2π
DR
onde
Ik =
Z
Rn
In−2 In−3 · · · I2 I1 ,
n
π
senk (θ) dθ,
0
k = 1, 2, . . . , n − 2.
Um cálculo elementar mostra que
Z
0
π
k−1
sen (x) dx =
k
k
Z
0
π
senk−2 (x) dx.
240
Cálculo Avançado I
Assim, para k inteiro par, obtemos
k−1
k−3
5
3
Ik =
···
I2 ,
k
k−2
6
4
k−4
4
2
k−2
Ik−1 =
···
I1 ,
k−1
k−3
5
3
de modo que
2
2π
I2 I1 =
.
(12.43)
k
k
Com o mesmo argumento mostra-se que (12.43) vale também para k
ı́mpar. Assim, se n é par, n − 2 também é par e podemos agrupar
dois-a-dois todos os fatores evolvendo as integrais Ik , isto é,
Ik Ik−1 =
In−2 In−3 In−4 In−5 · · · (I2 I1 ) =
=
2π
2π
2π
···
(n − 2) (n − 4)
2
(2π)n/2
.
(n − 2)(n − 4) · · · 2
Se n é ı́mpar, n − 2 também o é, e o agrupamento dois-a-dois acima
toma a forma
2π
2π
2π
In−2 In−3 In−4 In−5 · · · (I3 I2 )I1 =
· · · I1
(n − 2) (n − 4)
3
2(2π)(n−1)/2
=
.
(n − 2)(n − 4) · · · 3
Logo, o conteúdo de BR é:
n
R
2π k
n (k − 1)!
c(BR ) =
n
R
2π k
n k − 12 k − 32 · · · 32 12
se n = 2k,
(12.44)
se n = 2k + 1.
Observação: As fórmulas (12.44) podem ser expressas de modo
unificado, sem distinguir entre n par ou n ı́mpar, se utilizarmos a
função gama:
Z
∞
Γ(x) =
0
tx−1 e−t dt,
x > 0.
A integral de Riemann em R
n
241
Pode-se verificar que Γ(x) satisfaz, entre outras, as seguintes propriedades:
√
Γ(x + 1) = xΓ(x), Γ(1/2) = π.
(12.45)
Com essas propriedades, podemos mostrar (veja Exercı́cios) que
c(BR ) =
Rn 2π n/2
.
n Γ(n/2)
Observação 12.38: É usual denotar Sn−1 = ∂B1 (0) a esfera unitária de Rn . Assim, como veremos no próximo capı́tulo, a medida
superficial de Sn−1 é
2π n/2
|Sn−1 | =
.
Γ(n/2)
Para simplificar a notação nos cálculos envolvendo coordenadas esféricas, escrevemos ω = (ω1 , ω2 , . . . , ωn ), onde
ω1 = sen(θn−1 ) sen(θn−2 ) · · · sen(θ2 ) sen(θ1 ),
ω2 = sen(θn−1 ) sen(θn−2 ) · · · sen(θ2 ) cos(θ1 ),
ω3 = sen(θn−1 ) sen(θn−2 ) · · · cos(θ2 ),
(12.46)
..
..
..
.
.
.
ωn−1 = sen(θn−1 ) cos(θn−2 ),
ωn = cos(θn−1 ).
Desse modo, temos x = ρω e dx = ρn−1 dω, com
dω = senn−2 (θn−1 ) senn−3 (θn−2 ) · · · sen(θ2 ).
Com essa notação, e como consequência do Teorema de Fubini 12.24,
escrevemos
!Z
Z R
n−1
c BR (0) =
ρ
dρ
dω,
Sn−1
0
onde
Z
2π n/2
.
Γ(n/2)
Sn−1
Em particular, se f é uma função radial, temos
!
Z
Z R
f (x) dx =
f (ρ)ρn−1 dρ |Sn−1 |.
dω = 2πIn−2 In−3 · · · I2 I1 =
BR (0)
0
(12.47)
242
Cálculo Avançado I
• Aplicação: integrais com domı́nios variáveis
Sob certas condições de regulariddade de f , é possı́vel permutar os
sı́mbolos de derivada e integral (veja Exercı́cio 5.13), isto é,
Z
Z
d
∂f
f (t, x) dx =
(t, x) dx.
(12.48)
dt Ω
Ω ∂t
Nesta seção veremos como o Teorema 12.36 pode ser aplicado para
estender a fórmula (12.48) no caso em que o domı́nio de integração
também depende de t. Como veremos na sequência, resultados desse
tipo são importantes em diversos contextos, tais como na Mecânica
do Contı́nuo.
No que segue, consideramos o seguinte:
(1) g : R × Rn → Rn é função de classe C 2 em R × Rn tal que, para
todo t ∈ R, a aplicação u 7→ g (t, u) é um difeomorfismo de classe
C 1 em Rn ;
(2) f : R × Rn → R é uma função de classe C 1 em R × Rn .
Nas condições acima, denotamos:
(3) se A ⊂ Rn , então At = g(t, A);
(4) como para cada x ∈ At , existe um único u ∈ A tal que x =
g (t, u), definimos
∂g
(t, u)
v (t, x): =
∂t
Teorema 12.39: Sejam g e f satisfazendo as condições (1) e (2)
acima e, com a notação introduzida em (3) e (4), consideremos K ⊂
Rn um conjunto compacto e M : R → R a função definida por
Z
M (t) =
f (t, x) dx.
Kt
Então M é derivável e
dM
=
dt
Z
Kt
∂f
+ div(f v ) dx.
∂t
(12.49)
Observação: Para tornar a notação mais clara, escreveremos
∂gi
Du g (t, u) =
(t, u)
= g ′ (t, u).
∂uj
i,j=1,...,n
A integral de Riemann em R
n
243
Lembremos também que
n
X
∂vi
div v (t, x) = tr Dx v (t, x) =
(t, x).
∂xi
i=1
Prova do Teorema 12.39: Pelo Teorema 12.36, temos
Z
M (t) =
f t, g (t, u) det Du g (t, u) du.
K
Fixado u ∈ K, a aplicação t 7→ f t, g (t, u) det Du g (t, u) é de classe
C 1 em R. Logo (veja Exercı́cio 12.18),
Z
dM
∂ =
f t, g (t, u) det Du g (t, u) du.
dt
K ∂t
Observe que, para cada u ∈ K, temos
∂f
∂ ∂g
f t, g (t, u) =
(t, g (t, u)) + ∇f (t, g(t, u)) ·
(t, u),
∂t
∂t
∂t
de modo que, retornando à variável x,
Z ∂f
∂g
(t, g(t, u)) + ∇f (t, g(t, u)) ·
(t, u) det Du g (t, u) du
∂t
∂t
K
Z ∂f
=
(t, x) + ∇f (t, x) · v (t, x) dx.
∂t
Kt
(12.50)
Pela Proposição 5.15, temos
−1 ∂ ∂
det Du g (t, u) = tr Du g (t, u)
Du g (t, u) det Du g (t, u) .
∂t
∂t
(12.51)
Como estamos supondo g de classe C 2 , temos
∂ 2 gi
∂ 2 gi
(t, u) =
(t, u),
∂t∂uj
∂uj ∂t
∀i, j = 1, . . . , n,
que em notação matricial se expressa por
∂ ∂g
Du g (t, u) = Du
(t, u) .
∂t
∂t
244
Cálculo Avançado I
Além disso, como
Du g (t, u)
−1
= Dx g −1 (t, x) ,
∀t ∈ R,
temos pela Regra da Cadeia,
∂g
∂g
Dx v (t, x) = Dx
(t, u) = Du
(t, u) Dx g −1 (t, x)
∂t
∂t
−1
∂g
= Du
(t, u) Du g (t, u) .
∂t
Lembrando que tr AB = tr BA, obtemos de (12.51),
−1 ∂ Du g (t, u) = tr Dx v (t, x) = div v (t, x).
∂t
(12.52)
Assim, segue de (12.51) e (12.52),
Z
Z
∂
f t, g (t, u)
det Du g (t, u) du =
f (t, x) div v (t, x) dx.
∂t
K
Kt
(12.53)
Somando-se (12.50) e (12.53), obtemos (12.49) e a prova está concluı́da.
tr
Du g (t, u)
Observação: Em dimensão n = 1, se Kt = [0, a(t)], (12.49) toma a
forma
Z a(t)
Z a(t) d
∂f
∂
′
f (t, x) dx =
(t, x) +
f (t, x)a (t) dx
dt 0
∂t
∂x
0
Z a(t)
∂f
=
(t, x) dx + f t, a(t) a′ (t).
∂t
0
(12.54)
Como veremos no próximo capı́tulo, a fórmula acima
pode ser estendida para n > 1, onde o termo de fronteira f t, a(t) a′ (t) é substituı́do
por uma integral de superfı́cie sobre a fronteira de Kt .
Observação: A fórmula (12.49) é importante em várias aplicações,
dentre as quais destacamos aqui, muito brevemente, a Mecânica do
Contı́nuo. Nessa teoria, supõe-se que as leis de Newton da Mecânica
A integral de Riemann em R
n
245
Clássica se aplicam sobre as partı́culas que compõem um dado corpo
material. Entretanto, esse corpo é considerado como um meio contı́nuo (o que intuitivamente poderia ser interpretado como o espaço
ocupado pelo corpo — a configuração do corpo — onde os pontos se
confundem com as partı́culas materiais). Com essa interpretação, o
movimento das partı́culas pode ser descrito pela função g (t, u). Mais
precisamente, se um ponto P inicialmente em K com coordenadas
u = (u1 , u2 , u3 ), se desloca de sua posição inicial, estará no tempo
t na posição x = g (t, u). Assim, o corpo material que no instante
inicial estava ocupando a região K ⊂ R3 (configuração inicial), estará
no tempo t ocupando a região Kt = g (t, K). Dessa forma, a função g
descreve as grandezas cinemáticas do movimento, como por exemplo
a velocidade v de cada partı́cula.
• Aplicação: a equação da conservação da massa
Uma aplicação imediata de (12.49) é a Equação da Conservação
da Massa, também conhecida como Equação da Continuidade. Seja
ρ = ρ(t, x) a função que descreve a densidade de massa (por unidade
de volume) no instante t e posição x. Dado uma parte ωt ⊂ Kt , a
massa dessa parte ωt é dada por
Z
m(t, ωt ) =
ρ(t, x) dx,
ωt
onde ωt = g (t, ω0 ), ω0 ⊂ K. No denominado Princı́pio da Conservação da Massa supõe-se que m(t, ωt ) = m(0, ω0 ) para todo t > 0,
e para qualquer parte ωt da configuração Kt do corpo.
Nas condições do Teorema 12.39, temos
Z d
∂ρ
m(t, ωt ) =
(t, x) + div(ρ(t, x)v(t, x) dx = 0.
dt
∂t
ωt
Como ωt pode ser uma parte qualquer de Kt , conclui-se
∂ρ
(t, x) + div ρ(t, x)v(t, x) = 0,
∂t
∀t > 0, ∀x ∈ Kt .
(12.55)
Vale aqui observar que se a função g e a densidade na configuração
inicial ρ0 (u) são conhecidas, então o Princı́pio da Conservação da
246
Cálculo Avançado I
Massa, m(t, ωt ) = m(0, ω0 ), pode também ser expressa por
Z
Z
Z
ρ(t, x) dx =
ρ t, g (t, u) det Du g (t, u) du =
ρ0 (u) du
ωt
ω0
ω0
de modo que a Equação da Continudade toma a forma,
ρ t, g (t, u) det Du g (t, u) = ρ0 (u), ∀t > 0, ∀u ∈ K.
(12.56)
No primeiro caso, (12.55), dizemos que a equação está formulada em
variáveis Eulerianas. No segundo caso, (12.56), dizemos que está em
variáveis Lagrangeanas. Vale observar que, quando aplicadas, as leis
da Mecânica agem sobre a configuração Kt , para todo t, isto é, em
variáveis Eulerianas. Assim, é importante fazer a distinção entre as
duas formulações.
Exercı́cios:
Exercı́cio 12.1. (a) Dê um exemplo de um conjunto A ⊂ R2 limitado
tal que c(∂A) > 0.
(b) Seja A ⊂ Rn um conjunto limitado e I um n-pavê tal que I ⊃ A.
Considere uma partição P ∈ P(II ). Mostre que
J(∂A, P ) = J(A, P ) − J(A, P ).
(c) Seja A ⊂ Rn limitado tal que A′ é finito. Mostre que A é Jmensurável e c(A) = 0.
Exercı́cio 12.2. Mostre que se A ⊂ Rn é J-mensurável, o mesmo
vale para A. A recı́proca é verdadeira?
Exercı́cio 12.3. Seja A ⊂ Rn conjunto J-mensurável. Mostre que:
(1) existe {Ak }k∈N sequência de conjuntos elementares tal que
A1 ⊂ A2 ⊂ . . .
e
lim c(Ak ) = c(A);
k→∞
(2) existe {Bk }k∈N sequência de conjuntos elementares tal que
B1 ⊃ B2 ⊃ . . .
e
lim c(Bk ) = c(A).
k→∞
A integral de Riemann em R
n
247
Exercı́cio 12.4. Seja C o conjunto de Cantor, isto é, aquele obtido
pelo seguinte processo recursivo:
C1 = [0, 1] \
1 2
,
3 3
, C2 = C1 \
1 2
,
9 9
∪
7 8
,
9 9
, etc...
Mostre que ∂ [0, 1] \ C = C e conclua que [0, 1] \ C é J-mensurável.
Exercı́cio 12.5. Prove o Corolário 12.9.
Exercı́cio 12.6. Mostre as seguintes propriedades sobre medida zero:
(1) Se m(A) = 0 e B ⊂ A, então m(B) = 0;
(2) Se c(A) = 0, então m(A) = 0;
(3) A união enumerável de conjuntos de medida zero tem medida
zero;
(4) m(A) = 0 se, e somente se, existe uma famı́lia enumerável de
n-paralelepı́pedos satisfazendo as seguintes condições:
A⊂
∞
[
j=1
◦
Ij
e
∞
X
j=1
◦
c I j < ε.
(5) Seja I = [a1 , b1 ] × · · · × [an , bn ] um n-paralelepı́pedo tal que
aj < bj e ∂II a fronteira der I . Mostre que m(∂II ) = 0, mas que
I não tem medida zero.
Exercı́cio 12.7. Seja I ⊂ Rn (n ≥ 1) um n-pavê e f : I → R função
contı́nua. Considere o gráfico de f :
Graf(f ) = x = (x′ , xn+1 ) ∈ Rn+1 ; x′ ∈ I , xn+1 = f (x′ ) .
Mostre que Graf(f ) tem conteúdo nulo em Rn+1 .
Exercı́cio
12.8. Seja γ : [a, b] → Rn uma curva retificável e Γ =
γ(t) ; t ∈ [a, b] . Mostre que Γ tem conteúdo de Jordan nulo em Rn .
Exercı́cio 12.9. Sejam A ⊂ Rn conjunto J-mensurável e f, g : A →
R funções Riemann-integráveis. Mostre que f g é Riemann-integrável
em A.
248
Cálculo Avançado I
Exercı́cio 12.10. Seja I = [0, 1] × [0, 1] e considere a função f : I →
R assim definida:
1
se x ∈ Q,
f (x, y) =
2y se x ∈
/ Q.
f é Riemann integrável em I ? As integrais iteradas existem? Justifique suas repostas.
Exercı́cio 12.11. Seja A = Q ∩ [0, 1]. Para cada x ∈ A, x = p/q
fração irredutı́vel, considere o conjunto S(x) assim definido: S(0) =
{(0, 0)} e se x 6= 0,
n m
S(x) =
,
; n, m = 0, 1, . . . , p .
q q
Considere a função f : [0, 1] × [0, 1] → R definida por
n
f (x, y) = 0 se x ∈ A e (x, y) ∈ S(x),
1 senão.
Mostre que
Z 1 Z
0
1
f (x, y) dy dx =
0
Z
0
1
Z
1
f (x, y) dx dy = 1,
0
mas f não é Riemann-integrável em [0, 1] × [0, 1].
Exercı́cio 12.12. Obtenha uma estimativa da constante C de (12.32)
em ternos de M e n.
Exercı́cio 12.13. Seja f : [0, 1] → R contı́nua e T ⊂ R2 o tiângulo
com vértices em (0, 0), (1, 0) e (0, 1). Mostre que
Z
Z 1
f (x + y) dxdy =
sf (s) ds.
T
0
Exercı́cio 12.14. Sejam B1 (0) a bola aberta de R2 (relativa à norma
euclidiana), de raio 1 e centro em zero, f : R2 → R uma função
contı́nua e Rθ a matriz de rotação:
cos θ
sen θ
Rθ =
.
− sen θ cos θ
A integral de Riemann em R
n
249
Considere a função g definida por
Z
g(θ) =
f (Rθ x) dx.
B1 (0)
Mostre que g(θ) = g(0) para todo θ ∈ R.
Exercı́cio 12.15. Sejam α ∈ R, 0 < a < b < +∞ e
D = x ∈ Rn ; a < kxk2 < b .
Considere f : D → R a função definida por f (x) = kxkα
2 . Mostre que
n−1
Z
|S
|(n + α)−1 (bα+n − aα+n ) se α + n 6= 0,
f (x) dx =
n−1
|S
| ln(b/a)
se α + n = 0.
D
1/p
Exercı́cio 12.16. Seja kxkp = |x1 |p + |x2 |p + · · · + |xn |p
, p ≥ 1,
a norma p de Rn . Determine os valores de α ∈ R para os quais é
finita a integral
Z
kxkα
onde B1 = {x ∈ Rn ; kxk2 ≤ 1}.
p dx,
B1
Exercı́cio 12.17. Seja BR (0) a bola fechada de centro em zero e raio
R > 0 de Rn , relativamente à norma k k1 , isto é,
BR (0) = {(x1 , x2 , . . . , xn ); |x1 | + |x2 | + · · · + |xn | ≤ R}.
Seja Vn (R) o volume de BR (0).
(a) Prove que Vn (R) = Rn Vn (1).
(b) Mostre que Vn (1) = 2n /n!.
Exercı́cio 12.18. Sejam f : R × Rn função de classe C 1 e Ω ⊂ Rn
aberto J-mensurável. Considere a função M : R → R definida por
Z
M (t) =
f (t, x) dx.
Ω
Mostre que M é de classe C 1 em R e
Z
∂f
′
M (t) =
(t, x) dx,
Ω ∂t
∀t ∈ R.
250
Cálculo Avançado I
Exercı́cio 12.19. Seja f : Rn → R de classe C 1 e γ : R → Rn curva
de classe C 1 tal que γ(0) = 0. Considere a função F : (0, +∞) × R →
R definida por
Z
F (t, r) =
f (x) dx,
Br (γ(t))
onde Br γ(t) denota a bola de aberta de centro em γ(t) e raio r > 0.
Mostre que F é de classe C 1 e calcule
∂F
(t0 , r0 ),
∂t
∂F
(t0 , r0 ).
∂r
Exercı́cio 12.20. Para cada R > 0 e n ∈ N, consideremos os conjuntos
BR (n) = x ∈ Rn ; kxk2 ≤ R , CR (n) = x ∈ Rn ; kxk∞ ≤ R .
(1) Use coordenadas polares para calcular
Z
2
IR (2) =
e−kxk2 dx.
BR (2)
(2) Mostre que BR (2) ⊂ CR (2) ⊂ B√2R (2) e conclua que
Z
p
IR (2) ≤
R
−r2
e
−R
q
dr ≤ I√2R (2).
(3) Usando (2) e o Teorema de Fubini 12.24, mostre que
Z
Z
2
−kxk22
e
dx = lim
e−kxk2 dx = π n/2 .
Rn
R→+∞
CR (n)
(4) Considere fR : (0, ∞) → R definida por
Z
2
fR (α) =
e−αkxk2 dx.
CR (n)
Mostre que fR (α) é derivável em relação a α e calcule a derivada
fR′ (α).
A integral de Riemann em R
n
251
(5) Mostre que existe o limite
lim fR′ (α),
R→+∞
∀α > 0.
(6) Use os resultados anteriores para calcular
Z
2
kxk22 e−kxk2 dx.
Rn
(7) Com o resultado de (3), a fórmula (12.47) pode ser obtida diretamente a partir da seguinte astúcia: use coordenadas esféricas e o
Teorema de Fubini para obter
Z
Z
Z
1 ∞ −s (n/2)−1
1
n/2
π
=
e s
dρ
dω = Γ(n/2)
dω .
2 0
2
Sn−1
Sn−1
Exercı́cio 12.21. Sejam f, g : Rn → R funções contı́nuas, A ⊂ Rn
conjunto J-mensurável, p, q ∈ (1, +∞) tais que 1/p+1/q = 1. Mostre
que
1/p Z
1/q
Z
Z
p
p
fg ≤
|f |
|g|
.
(12.57)
A
A
A
n
Estenda a desigualdade (12.57) para A = R supondo que as integrais
impróprias de |f |p e |g|q existam.
Exercı́cio 12.22. Seja G+
n o subconjunto de Mn×n (R) das matrizes
simétricas e positivas.
(a) Mostre que
Z
1
hAx : xi
−n/2
p
dx, ∀A ∈ G+
exp −
= (2π)
n.
2
n
det(A)
R
(b) Mostre que G+
n é convexo e que
a aplicação A 7→ det(A) é logcôncava, isto é, A 7→ ln det(A) é côncava.
Sugestão: Para provar o item (b), use o Exercı́cio 12.21.
Exercı́cio 12.23. Seja u = (u1 , · · · , un ) um vetor de Rn e considere
a matriz
u2
u u
··· u u
1
u2 u1
A=
..
.
un u1
1 2
u22
..
.
un u2
1 n
· · · u2 un
..
..
.
.
.
· · · u2n
252
Cálculo Avançado I
(a) Mostre que A é diagonalizável e seus autovalores são
λ1 = · · · = λn−1 = 0,
λn = kuk22 .
(b) Use este fato para mostrar que det(A) = 1 + kuk22 .
Observação: A matriz A é, por definição, o produto tensorial do
vetor u por ele mesmo, i.e., A = [u ⊗ u]. Veja (A.6) no Apêndice.
13
Gauss, Green e Stokes
No capı́tulo anterior provamos o Teorema da Mudança de Variáveis,
que estende para as integrais de várias variáveis o método de substituição usual do Cálculo de uma variável. Neste capı́tulo vamos
abordar o Teorema de Gauss também denominado Teorema da Divergência, que estende ao Rn o bem conhecido método de integração
por partes. Como corolário do Teorema de Gauss, apresentamos o
Teorema de Green em Rn , o Teorema de Stokes em R3 , assim como
algumas aplicações clássicas. Para concluir, apresentamos uma introdução sobre campos vetoriais da Fı́sica Matemática e concluiremos
com uma pequena introdução sobre Formas Diferenciais.
Superfı́cies de Rn
Retornemos ao Capı́tulo 6 para relembrar como definimos uma
curva de Rn :
“ Seja I um intervalo de R e γ : I → Rn uma função
contı́nua. Dizemos que Γ = γ(I) é uma curva de Rn e γ
uma parametrização de Γ ”
Esta definição analı́tica é conveniente sob diversos aspectos, embora
possa incluir, mesmo em R2 , conjuntos Γ que, do ponto de vista
geométrico, fogem ao senso comum. Entretanto, ela inclui uma “caracterı́stica dinâmica” dada pela parametrização que é bastante útil
e intuitiva. Mas o ponto essencial aqui é que uma curva em Rn é,
254
Cálculo Avançado I
de certa forma, um conjunto “uni-dimensional”(i.e., com um grau
de liberdade) imerso em Rn . Por outro lado, quando dizemos que
S é uma superfı́cie de R3 , o que vem à mente é a imagem de um
conjunto “bi-dimensional” (com dois graus de liberdade) imerso em
um espaço tridimensional, isto é, um conjunto de co-dimensão 1.
Os exemplos clássicos de superfı́cies em R3 estudados nos cursos de
Cálculo são, em geral, descritos por parametrizações. Tudo isso nos
leva naturalmente, e por analogia, a definir uma superfı́cie em Rn .
Definição 13.1: Seja D ⊂ Rn−1 (n ≥ 2) e F : D → Rn uma
função contı́nua. Dizemos que S = F (D) é uma n-superfı́cie e F
uma parametrização de S.
Observe que uma 2-superfı́cie é uma curva e, mesmo nesse caso, a
definição acima é geral demais por incluir conjuntos S que fogem ao
senso comum do ponto de vista geométrico (por exemplo, superfı́cies
que se auto-interseptam de forma bastante complicada). Para contornar essas dificuldades, vamos impor restrições ao domı́nio D e à
função F .
Definição 13.2: Seja U ⊂ Rn−1 (n ≥ 2) um conjunto aberto. Dizemos que F : U → Rn é um mergulho, se F é injetiva, diferenciável
em U e tal que, para todo u ∈ U , F ′ (u) também é injetiva. Dizemos
que F é um mergulho de classe C k , k ∈ N, se cada componente Fi
de F é função de classe C k .
Definição 13.3: Dizemos que S é uma n-superfı́cie diferenciável se,
para cada x ∈ S, existem um aberto U ⊂ Rn−1 , um aberto V ⊂ Rn
contendo x e um mergulho F : U → Rn tais que:
F (U ) = S ∩ V
e
F −1 : S ∩ V → U
é contı́nua.
(13.1)
A coleção dos mergulhos cujas imagens cobrem a superfı́cie S é
denominada sistema completo de cartas locais. Se a superfı́cie S
admite um sistema completo de cartas locais com mergulhos de classe
C k , dizemos que ela é uma superfı́cie de classe C k .
Observação: A rigor, quando n > 3, deverı́amos denominar S uma
hiper-superfı́cie, tal como dizemos dos hiper-planos H de Rn :
H = x ∈ Rn ; hx − x0 : ui = 0 .
Gauss, Green e Stokes
255
Observe também que a Definição 13.3 pode não incluir algumas superfı́cies que “possuem bordo”. Para incluı́-las, precisamos acrescentar uma restrição ao sistema de cartas locais.
Definição 13.4: Dizemos que uma n-superfı́cie diferenciável S tem
bordo se, para todo x ∈ S, existem um aberto U contido em Rn−1
ou no semi-espaço Rn−2 × (0, +∞), um aberto V ⊂ Rn contendo x e
um mergulho F : U → Rn de classe C 1 satisfazendo as propriedades
definidas em (13.1). Nesta caso, o bordo de S (que denotamos por ∂S)
está contido na união das imagens daqueles mergulhos cujos domı́nios
são abertos do semi-espaço Rn−2 × (0, +∞).
Exemplo: A semi-esfera positiva
Sn−1
= x ∈ Rn ; kxk2 = 1, xn > 0
(13.2)
+
é uma superfı́cie com bordo que pode ser definida com um único
mergulho. O bordo de Sn−1
é o conjunto
+
∂Sn−1
= x ∈ Rn ; kxk2 = 1, xn = 0
+
A esfera Sn−1 é uma superfı́cie sem bordo que pode ser definida com
dois mergulhos (veja Exercı́cios).
Observação: Uma superfı́cie S tal como definida acima é, globalmente, uma “colagem de pedaços lisos” homeomorfos a abertos de
Rn−1 . Se ela é de classe C 1 , então, como veremos a seguir, ela é uma
colagem de gráficos de funções reais de n − 1 variáveis.
Proposição 13.5: Seja S uma n-superfı́cie de classe C 1 e x0 =
(x10 , . . . , xn0 ) ∈ S. Então existem um aberto V0 ⊂ Rn contendo x0 ,
u0 ∈ Rn−1 , um aberto W0 ⊂ Rn−1 contendo u0 e uma função ϕ :
W0 → R de classe C 1 tal que, para algum i = 1, 2, . . . , n, tem-se:
(a) ϕ(u0 ) = xi0 ;
(b) V0 ∩ S é o gráfico de ϕ.
Prova: Por hipótese, existem V ⊂ Rn aberto contendo x0 , U ⊂ Rn−1
e F : U → Rn mergulho de classe C 1 , F (U ) = V ∩ S e F −1 : V ∩ S →
U é contı́nua.
Seja u0 = F −1 (x0 ) e considere o conjunto de vetores
C = L1 , . . . , Ln , onde
∂Fi
∂Fi
Li =
(u0 ), . . . ,
(u0 )
(13.3)
∂u1
∂un−1
256
Cálculo Avançado I
(isto é, Li é o vetor cujas coordenadas são os coeficientes da i-ésima
linha da matriz [F ′ (u0 )]). Como por hipótese F ′ (u0 ) é injetiva, existem n − 1 vetores linearmente independentes no conjunto C. Suponhamos Li0 o vetor que se expressa como combinação linear dos de
e = L1 , . . . , Li −1 , Li +1 . . . , Ln é uma
mais. Então, o conjunto C
0
0
base de Rn−1 .
Consideremos então a aplicação φ : U → Rn−1 definida por φ =
P ◦ F , onde P é a projeção ortogonal sobre o subespaço gerado por
e
C,
P (x1 , . . . , xn ) = (x1 , . . . , xi0 −1 , xi0 +1 . . . , xn ).
Então, φ(u) = F1 (u), . . . , Fi0 −1 (u), Fi0 +1 (u) . . . , Fn (u) , u ∈ U , é de
classe C 1 em U e
—
—
L1
L2
—
—
.
..
..
.
.
.
.
[φ′ (u0 )] = — Li0 −1 — .
— Li0 +1 —
.
..
..
.
.
.
.
—
Ln
—
Como det[φ′ (u0 )] 6= 0, o Teorema da Função
Inversa nos garante a
existência de δ > 0 tal que W0 = φ Bδ (u0 ) é aberto e φ : Bδ (u0 ) →
W0 é um difeomorfismo de classe C 1 . Então ϕ : W0 → R definida
por
ϕ(x1 , . . . , xi0 −1 , xi0 +1 , . . . , xn )
= Fn φ−1 (x1 , . . . , xi0 −1 , xi0 +1 , . . . , xn )
satisfaz as condições (a) e (b) do enunciado.
Observação 13.6: A prova acima indica que se S é n-superfı́cie de
classe C 1 e x0 ∈ S, podemos escolher um dos eixos coordenados (digamos, aquele gerado pelo vetor e i0 da base canônica) e um aberto V
tal que S ∩ V é o gráfico de uma função
ϕ de classe C1 definida
em um aberto
do
subespaço
H
=
e
,
.
.
.
,
e
,
e
,
.
.
.
,
e
e
1
i
−1
i
+1
n
0
0
n
ϕ P (x0 ) = x0 , onde P é a projetção ortogonal de R sobre H.
Gauss, Green e Stokes
257
• Superfı́cies orientáveis
Para completar as definições básicas sobre os objetos que trataremos neste capı́tulo, vamos restringir um pouco mais as condições
sobre os mergulhos que definem as cartas locais de S. A ideia é evitar aquelas superfı́cies de R3 tais como a famosa faixa de Möbius 1
(sobre a qual é possı́vel, “partindo-se de um ponto qualquer, voltar
ao ponto de partida de cabeça para baixo sem virar cambalhotas”).
Figura 13.1 - Faixa de Möbius
Sejam F1 e F2 mergulhos distintos de um sistema completo de
cartas locais de S. Denotemos S1 = F1 (U1 ) e S2 = F2 (U2 ). Se
S1 ∩ S2 = W 6= ∅, dizemos que as cartas se interseptam. Neste caso,
se Di = Fi−1 (W ), (i = 1, 2), podemos definir a aplicação de conexão
T : D1 → D2 ,
T (u) = (F2−1 ◦ F1 )(u).
(13.4)
Observe que D1 e D2 são abertos em Rn−1 como imagem inversa de
funções contı́nuas (aqui considerando S ∩ W com a métrica induzida
pela norma de Rn ) e que T é um homeomorfismo de D1 sobre D2 .
Proposição 13.7: Toda aplicação de conexão em uma n-superfı́cie
de classe C 1 é um difeomorfismo de classe C 1
e) =
Prova: Sejam F e Fe dois mergulhos de S tais que F (U ) ∩ Fe (U
e → D, onde
W 6= ∅. Consideremos a aplicação de conexão T : D
−1
−1
e = Fe (W ). Para u0 ∈ D fixado, seja ũ0 =
D = F (W ) e D
T (u0 ). Consideremos o conjunto C = L1 , . . . , Ln , com os vetores
1
A faixa de Möbius, bem conhecida dos matemáticos, ganhou fama no
mundo das artes com a obra do genial artista holandês M.C. Esher. Veja
a gravura “Faixa de Möbius II” em http://www.mcescher.com/
258
Cálculo Avançado I
Li definidos como em (13.3). Como a matriz [F ′ (u0 )] tem posto n−1,
podemos supor sem perda de generalidade que os n − 1 primeiros
vetores de C são linearmente independentes. Consideremos então
Φ : U × R → Rn definida por
Φ(u, ξ) = F1 (u), . . . , Fn (u) + ξ .
Então Φ é função de classe C 1 e
∂ F (u )
1 1 0
∂1 F2 (u0 )
..
[Φ′ (u0 , 0)] =
.
∂1 Fn−1 (u0 )
∂1 Fn (u0 )
Como
0
0
..
.
· · · ∂n−1 Fn−1 (u0 ) 0
· · · ∂n−1 Fn (u0 )
1
···
···
..
.
—
—
det[Φ′ (u0 , 0)] = det
...
∂n−1 F1 (u0 )
∂n−1 F2 (u0 )
..
.
L1
L2
..
.
— Ln−1
—
—
6= 0.
..
.
—
segue do Teorema
da Função Inversa, a existência de δ > 0 tal que
Φ Bδ (u0 ) = V0 é aberto de Rn e Φ : Bδ (u0 ) → V0 é um difeomorf0 = Fe−1 (V0 ∩ W ).
fismo de classe C 1 . Considere o conjunto aberto U
f0 ⊂ D
e e T | = Φ−1 ◦ Fe é de classe C 1 .
Então U
e
U
0
Mutatis-mutandis, provamos com o mesmo argumento que T −1 é
de classe C 1 e concluı́mos a prova.
Agora estamos em condições de definir a orientabilidade de n-superfı́cies.
Definição 13.8: Dizemos que uma n-superfı́cie S de classe C 1 é
orientável se admite um sistema completo de cartas locais tal que, se
dois mergulhos distintos quaisquer F1 e F2 cujas imagens S1 e S2 se
interseptam, a função de conexão T definida em (13.4) tem Jacobiano
positivo em todos os pontos de seu domı́nio. Mais precisamenete, com
a notação introduzida acima, S é orientável se
JT (u) > 0,
∀u ∈ D1 .
Gauss, Green e Stokes
259
Para as n-superfı́cies S orientáveis, podemos estabelecer uma orientação consistente com uma dada orientação de Ui .
Observação 13.9: Seja S uma n-superfı́cie de classe C 1 . Se S é
imagem de um único mergulho, então S é orientável. Se S tem um
sistema completo com duas cartas locais F1 e F2 tais que F1 (U1 ) ∩
F2 (U2 ) é conexo, então S é orientável. De fato, como JT (u) não se
anula, podemos trocar, se necessário, a ordem de coordenadas em U1
ou U2 de modo que JT (u) > 0 para todo u, o que significa S1 e S2
terem a mesma orientação.
Integrais de superfı́cie em Rn
Nesta seção vamos introduzir a definição de integral de n-superfı́cie,
integral esta que estende a bem conhecida fórmula da integral de
superfı́cie em R3 , a saber:
Z
Z
∂F
∂F
(t, s) ×
(t, s) dtds,
(13.5)
f dS =
f F (t, s)
∂t
∂s
S
U
onde F : U ⊂ R2 → R3 é uma parametrização de S = F (U ).
A fórmula (13.5) no caso em que f ≡ 1 é, por definição, a área de
S.
Observação: No Capı́tulo 6 deduzimos a fórmula para o comprimento de uma curva retificável Γ de classe C 1 a partir de aproximações por poligonais com vértices sobre a curva. A razão para não
procedermos da mesma forma para superfı́cies S em R3 , aproximandoa por poliedros com vértices sobre ela, reside no fato de não termos
estimativas simples para o processo de passagem ao limite. A abordagem “correta” é bem mais complicada e, por esta razão, preferimos
“definir” a área (como uma medida superficial) pela integral acima
com f ≡ 1. Entretanto, as aproximações feitas nos livros de Cálculo,
embora não rigorosas, sugerem a validade da fórmula.
Lembremos que o suporte de uma função f : Rn → Rm é, por
definição,
supp f = x ∈ Rn ; f (x) 6= 0 .
Definição 13.10: Sejam U ⊂ Rn−1 (n ≥ 3) aberto, F : U → Rn um
mergulho de classe C 1 e S = F (U ). Seja f : Rn → R função contı́nua
260
Cálculo Avançado I
com suporte compacto. Se supp f ∩ S 6= ∅, definimos a integral de
superfı́cie de f sobre S por
Z
Z
1/2
f (σ) dσ =
f F (u) det [F ′ (u)]T [F ′ (u)]
du.
(13.6)
S
U
Notação: Se F é um mergulho, denota-se
dσ: = det [F ′ (u)]T [F ′ (u)]
1/2
du.
Observação: A matriz [F ′ (u)]T [F ′ (u)] é quadrada de ordem n − 1,
simétrica e positiva definida. Verifique que no caso n = 3 e u = (t, s),
vale a igualdade
∂F
∂F
det [F (u)] [F (u)] =
(t, s) ×
(t, s)
∂t
∂s
′
T
′
2
.
Definição 13.11: Nas condições da Definição 13.10, denominamos
a medida de superfı́cie de S por
Z
1/2
du.
(13.7)
|S| =
det [F ′ (u)]T [F ′ (u)]
U
A definição de integral em (13.6) utiliza, de maneira aparentemente
fundamental, o mergulho F . Como veremos pelo resultado a seguir,
ela independe da escolha do mergulho.
Proposição 13.12: A integral de superfı́cie definida em (13.6) independe da escolha do mergulho F .
Prova: Sejam U1 e U2 abertos de Rn−1 , F : U1 → Rn e G : U2 → Rn
mergulhos de classe C 1 tais que
S = F (U1 ) = G(U2 ).
Considere g = F −1 ◦ G : U2 → U1 . Pela Proposição 13.7 g é um
difeomorfismo de U2 sobre U1 e segue da Regra da Cadeia (veja Teorema 5.9), [G′ (u)] = [F ′ (g(u))][g ′(u)], para todo u ∈ U2 . Então,
[G′ (u)]T [G′ (u)] = [g ′ (u)]T [F ′ (g(u))]T [F ′ (g(u))][g ′(u)]
Gauss, Green e Stokes
261
e
2
det [G′ (u)]T [G′ (u)] = det [F ′ (g(u))]T [F ′ (g(u))] det[g ′ (u)]
= det [F ′ (g(u))]T [F ′ (g(u))] |Jg (u)|2 .
Assim, se v = g(u), temos pelo Teorema 12.36,
Z
1/2
f G(u) det [G′ (u)]T [G′ (u)]
du
U2
Z
1/2
f F (g(u)) det [F ′ (g(u))]T [F ′ (g(u))]
|Jg (u)| du
=
U2
Z
1/2
=
f F (v) det [F ′ (v)]T [F ′ (v)]
dv.
U1
Exemplo: Consideremos a medida superficial da semi-esfera positiva
de raio R de Rn com centro na origem,
+
SR
= x ∈ Rn ; kxk2 = R, xn > 0 .
Seja DR = u ∈ Rn−1 ; kuk2 < R . Então, F : DR → Rn definida
por
q
F (u) = u, R2 − kuk22
+
é um mergulho de classe C 1 sobre SR
. Logo, a medida de superfı́cie
+
de SR é
Z
Z
1/2
det [F ′ (u)]T [F ′ (u)]
du
dσ =
+
SR
=
Z
DR
DR
R
p
du.
R2 − kuk22
Passando às coordenadas esféricas em Rn−1 , temos
Z
R
DR
p
du = 2π
R2 − kuk22
Z
0
R
!
R
√
r n−2 dr In−3 In−4 · · · I1 .
R2 − r 2
262
Cálculo Avançado I
Fazendo a substituição r = R sen(θ) e considerando a notação introduzida na seção sobre coordenadas esféricas do capı́tulo anterior,
obtemos
Z
0
R
R
√
r n−2 dr = Rn−1
2
2
R −r
Z
π/2
senn−2 (θ) dθ =
0
Rn−1
In−2 .
2
+
Portanto, a medida superficial de SR
é
Z
+
SR
dσ =
1 n−1
π n/2
R
In−2 In−3 · · · I2 I1 = Rn−1
.
2
Γ(n/2)
+
é orientável. Além
Observação: Segue da Observação 13.9 que SR
disso, a medida superficial da esfera de raio R é Rn−1 |Sn−1 |, onde
|Sn−1 | = In−2 In−3 · · · I2 I1 =
2π n/2
Γ(n/2)
é a medida superficial da esfera unitária de Rn . Observe também
que, para todo n ≥ 2,
d
c BR (0) = |∂BR (0)|.
dR
O Teorema de Gauss e Aplicações
Sejam Ω ⊂ Rn um aberto e ∂Ω sua fronteira.
Definição 13.13: Dizemos que Ω é de classe C 1 se sua fronteira ∂Ω,
é uma n-superfı́cie de classe C 1 em Rn .
Observação 13.14: Pela Proposição 13.5, ∂Ω é uma colagem de
gráficos de funções de n − 1 variáveis. Podemos então identificar
o domı́nio de cada uma dessas funções com o conjunto (parte de
um hyper-plano) obtido pela composição de uma rotação e uma
translação de um subconjunto de Rn−1 × {0}. Mais precisamente,
podemos deteminar:
Gauss, Green e Stokes
263
(1) r > 0 e um difeomorfismo Φ : Br (0) → V de classe C 1 , com
Φ(0) = x0 ;
(2) ϕ : Br (0) ∩ Rn−1 × {0} → R injetiva de classe C 1 ;
(4) R0 uma rotação e b0 ∈ Rn ;
tais que:
Ω ∩ V = Φ Br (0) ∩ Rn−1 × [0, ∞) ,
n−1
∂Ω ∩ V = Φ Br (0) ∩ R
× {0} ,
e, se A0 é a função afim definida por A0 (y) = R0 (y) + b0 , então
Ω ∩ V ⊂ A0 (y ′ , yn ) ; yn ≥ ϕ(y ′ ) ,
′
′
∂Ω ∩ V ⊂ A0 (y , yn ) ; yn = ϕ(y ) .
Observação 13.15: Veja que, pela Observação 13.14, a fronteira de
um aberto de classe C 1 é, localmente e a menos de um movimento
rı́gido (isto é, uma rotação seguida de translação), o gráfico de uma
função de classe C 1 e, globalmente, uma “colagem” de pedaços difeomorfos de abertos de Rn−1 . Para os resultados que focaremos neste
texto, é suficiente a regularidade C 1 das funções Φ, Φ−1 e ϕ.
Observação: Todo aberto de classe C 1 é localmente J-mensuravel,
isto é, Ω ∩ I é J-mensurável qualquer que seja o n-paralelepı́pedo I
(veja Exercı́cios).
Proposição 13.16: Seja Ω é um aberto de classe C 1 . Considere
U = {y ′ ∈ Rn−1 ; ky ′ k < r}. Então, existe V aberto de Rn tal que
F : U → Rn definida por F (y ′ ) = R0 y ′ , ϕ(y ′ ) + b0 é um mergulho
sobre a n-superfı́cie ∂Ω ∩ V e
T det F ′ (y ′ ) F ′ (y ′ ) = 1 + k∇ϕ(y ′ )k2 , ∀y ′ ∈ V.
(13.8)
Prova: Observe que U é a bola aberta de Rn−1 com centro em 0 e
raio r. Considere G : U → Rn definida por
G(y ′ ) = y ′ , ϕ(y ′ ) .
264
Cálculo Avançado I
É claro que G é diferenciável e, para y ′ ∈ U e h′ ∈ Rn−1 ,
G′ (y ′ )h′ = h′ , ∇ϕ(y ′ ) · h′ ,
(13.9)
de modo que, denotando ∂i ϕ a i-ésima derivada parcial de ϕ, a matriz
associada a G′ (y ′ ) é
1
0
′ ′ .
.
G (y ) =
.
0
∂1 ϕ
0
1
..
.
0
∂2 ϕ
...
...
..
.
0
0
..
.
...
0
. . . ∂n−2 ϕ
0
0
..
.
1
∂n−1 ϕ
cujo posto é n − 1. Logo, G′ (y ′ ) é injetiva, e como ϕ é de classe C 1 ,
G′ : U → L(Rn−1 ; Rn )
é contı́nua. Portanto, G é um mergulho de U sobre a interceção de
Ω com o gráfico de ϕ, isto é, sobre o conjunto
Graf(ϕ) ∩ Ω = (y ′ , yn ) ; yn = ϕ(y ′ ) ∩ Ω.
Observe também que (veja o Teorema A.14 no Apêndice)
Logo,
′ ′ T ′ ′ G (y ) G (y ) = I + ∇ϕ(y ′ ) ⊗ ∇ϕ(y ′ ) .
det
T G′ (y ′ ) G′ (y ′ ) = 1 + ∇ϕ(y ′ ) · ∇ϕ(y ′ ).
Como F é a composta de G por uma rotação e uma translação,
concluı́mos que F também é injetiva e de classe C 1 , com F ′ (y ′ ) =
R0 ◦ G′ (y ′ ). Além disso,
′ ′ T ′ ′ ′ ′ T ′ ′ F (y ) F (y ) = G (y ) G (y ) ,
e a prova está concluı́da
Gauss, Green e Stokes
265
Definição 13.17: Nas condições da Definição 13.13,
cada ponto
σ ∈ ∂Ω pode ser expersso na forma σ = R0 y ′ , ϕ(y ′ ) + b0 e o vetor
normal unitário exterior a Ω no ponto σ é dado por
n(σ) =
1
(1 + k∇ϕ(y ′ )k22
1/2
R0 ∇ϕ(y ′ ), −1 .
(13.10)
Como ϕ é de classe C 1 , vemos que a aplicação σ 7→ n(σ) é contı́nua.
Pode-se observar também que o vetor normal n não depende de Φ
ou ϕ, mas somente de σ ∈ ∂Ω. É claro que se f é de classe C 1 numa
vizinhança de σ ∈ ∂Ω, vale a fórmula para a derivada normal exterior
∂f
(σ) = ∇f (σ) · n(σ).
∂n
• O Teorema de Gauss
O Teorema a seguir é denominado Teorema de Gauss e estende
ao Rn a bem conhecida fórmula de integração por partes do Cálculo
Integral de uma variável.
Tereoma 13.18: Sejam Ω ⊂ Rn aberto e f : Rn → R, função de
suporte compacto, ambos de classe C 1 . Então,
Z
Ω
∂f
(x) dx =
∂xj
Z
f (σ)n j (σ) dσ,
(13.11)
∂Ω
onde n j (σ) denota a j-ésima coordenada do vetor n(σ).
Prova: Faremos a prova em três etapas.
Etapa 1: Vamos inicialmente supor que Ω é da forma
Ω = (x′ , xn ) ∈ Rn ; xn > ϕ(x′ ) ,
onde ϕ : Rn−1 → R é função de classe C 1 . Neste caso, sua fronteira
é o gráfico de ϕ,
∂Ω = (x′ , xn ) ∈ Rn ; xn = ϕ(x′ ) .
266
Cálculo Avançado I
Dados M > 0 e k ∈ N, denotemos I k o k-cubo obtido pelo produto
cartesiano de I = [−M, M ] por ele mesmo, k vezes. Como f tem suporte compacto, podemos escolher M > 0 de tal forma que o suporte
de f esteja contido no n-cubo I n .
Pelo Teorema 12.24, temos, para cada j = 1, . . . , n − 1,
!
Z
Z
Z
M
Jj =
∂j f (x′ , xn ) dxn
∂j f (x) dx =
I n−1
Ω
É claro que
RM
−M
dx′ .
(13.12)
ϕ(x′ )
∂j f (x) dxj = 0, o que implica
Z
∂j f (x) dx = 0.
In
Por outro lado,
Z
∂j f (x) dx =
In
Z
Z
I n−1
ϕ(x′ )
−M
Z
+
I n−1
∂j f (x′ , xn ) dxn
Z
!
dx′
M
∂j f (x′ , xn ) dxn
ϕ(x′ )
!
dx′ .
Assim,
Jj = −
Z
Z
I n−1
ϕ(x′ )
∂j f (x′ , xn ) dxn
−M
Denotemos
′
h(x ) =
Então é claro que
Z
′
∂j h(x ) =
Z
!
dx′ .
ϕ(x′ )
f (x′ , xn ) dxn .
−M
ϕ(x′ )
−M
∂j f (x′ , xn ) dxn + f x′ , ϕ(x′ ) ∂j ϕ(x′ ).
Como o suporte de f está contido em I n , temos
Z M
∂j h(x′ ) dxj = 0, ∀j = 1, . . . , n − 1.
−M
(13.13)
Gauss, Green e Stokes
Portanto,
Z
0=
′
I n−1
267
′
∂j h(x ) dx = Jj +
Z
I n−1
f x′ , ϕ(x′ ) ∂j ϕ(x′ ) dx′ ,
de onde se conclui que, para j = 1, . . . , n − 1,
Z
Jj =
f x′ , ϕ(x′ ) ∂j ϕ(x′ ) dx′ .
(13.14)
I n−1
De (13.12), (13.13) e (13.14), obtemos
Z
Z
∂j f (x) dx =
f x′ , ϕ(x′ ) ∂j ϕ(x′ ) dx′ .
I n−1
Ω
Como
∂j ϕ(x′ ) = n j (x′ , ϕ(x′ )) 1 + k∇ϕ(x′ )k2
1/2
e a aplicação x′ 7→ f (x′ , ϕ(x′ ))n j (x′ , ϕ(x′ )) é contı́nua em Rn−1 ,
segue da Proposição 13.16 que
Z
Z
∂j f (x) dx =
f (σ)n j (σ) dσ.
(13.15)
Ω
∂Ω
Para j = n, basta observar que (veja (13.10))
−1
n n (x′ , ϕ(x′ )) = p
.
1 + k∇ϕ(x′ )k2
Logo,
Z
Ω
∂n f (x) dx =
Z
I n−1
Z
Z
M
ϕ(x′ )
!
∂n f (x′ , xn ) dxn dx′
=−
f x′ , ϕ(x′ ) dx′
n−1
Z I
p
=
f x′ , ϕ(x′ ) n n (x′ , ϕ(x′ )) 1 + k∇ϕ(x′ )k2 dx′
n−1
ZI
=
fn (σ)n n (σ) dσ.
∂Ω
(13.16)
268
Cálculo Avançado I
Das identidades obtidas em (13.15) e (13.16) (com j = 1, . . . , n),
obtemos (13.11).
Etapa 2: Consideremos agora Ω obtido por um movimento rı́gido de
um aberto O ⊂ Rn de classe C 1 , sendo O como na etapa 1, isto é,
Ω = R(O) + b, b ∈ Rn e R ∈ L(Rn ) rotação.
Seja g : Rn → R, definido por g(y) = f (Ry + b). É claro que g é de
classe C 1 e tem suporte compacto. Pela etapa 1, temos
Z
Z
∂j g(y) dy =
g y ′ , ϕ(y ′ ) n j (y ′ ), ∀j = 1, . . . , n.
I n−1
O
Pela Regra da Cadeia, temos
f ′ (x) = Rg ′ R−1 (x − b) = Rg ′ (y),
∀x ∈ Rn .
Denotemos aij os elementos da matriz [R]. Assim,
∂i f (x) =
n
X
aij ∂j g(y),
j=1
y = RT (x − b).
Logo, aplicando os resultados da Etapa 1, temos
Z
∂i f (x) dx =
Ω
=
n
X
j=1
n
X
aij
aij
j=1
=
=
Z
ZI
n−1
I n−1
Z
Z
Ω
∂j g(R−1 x − R−1 b) dx
I n−1
g y ′ , ϕ(y ′ ) n j (y ′ ) dy ′
(13.17)
g y ′ , ϕ(y ′ ) R n(y ′ )
f R y ′ , ϕ(y ′ ) + b R n(y ′ )
Pelo Teorema 13.16, F (y ′ ) = R y ′ , ϕ(y ′ ) + b, é um mergulho sobre
∂Ω, de modo que (13.17) equivale a (13.11).
Gauss, Green e Stokes
269
Etapa 3: No caso geral, para cada σ ∈ ∂Ω, existe um aberto Uσ e
funções Φσ , ϕσ satisfazendo as condições (1)–(4) da observação 13.13,
isto é, para cada σ ∈ ∂Ω, existe uma vizinhança Uσ tal que Uσ ∩ ∂Ω é
o gráfico de uma função de classe C 1 . Como ∂Ω ∩ supp f é compacto,
podemos escolher σ1 , . . . , σm ∈ ∂Ω tais que
supp(f ) ∩ ∂Ω ⊂
m
[
Uσi .
i=1
Seja U0 = Ω \ (U σ1 ∪ · · · ∪ U σm ). Então, U = U0 , Uσ1 , . . . , Uσm
é cobertura aberta de Ω. Seja Φ = {φ0 , . . . , φm } uma partição da
unidade de Ω subordinada a U (veja Lema 7.19). Então,
Z
∂i f (x) dx =
Ω
m Z
X
Ω
i=0
∂j φi (x)f (x) dx.
(13.18)
Mas, para cada i = 1, 2, . . . , m, supp(φi f ) ⊂ Uσi , de modo que ∂Ω ∩
Uσi é o gráfico de uma função de classe C 1 , o que nos remete à
Etapa 2. Logo,
Z
m Z
X
∂i f (x) dx =
Ω
i=0
φi (σ)f (σ)n j (σ) dσ =
∂Ω
Z
f (σ)n j (σ) dσ,
∂Ω
como querı́amos demonstrar.
Como consequência direta do Teorema 13.18, temos os resultados:
(1) o Teorema da Divergência, (2) o Teorema de Green, (3) as Identidades de Green e (4) a Fórmula de Euler, que enunciamos a seguir.
Corolário 13.19: Sejam Ω aberto e f : Rn → Rn , f = (f1 , . . . , fn ),
função de suporte compacto, ambos de classe C 1 . Então,
Z
Z
′
f (σ) ⊗ n(σ) dσ.
(13.19)
f (x) dx =
Ω
∂Ω
Em particular,
Z
Ω
div f (x) dx =
Z
∂Ω
f (σ) : n(σ) dσ.
(13.20)
270
Cálculo Avançado I
Prova: A fórmula (13.19) é consequência direta do Teorema 13.18
e da definição do produto tensorial
′ ⊗ (Veja Apêndice). Além disso,
lembrando que div f (x) = tr f (x) e que tr[u ⊗ v ] = hu : v i, a
fórmula (13.20) decorre diretamente de (13.19)
.
O Teorema 13.19 no caso n = 2 se reduz ao clássico Teorema de
Green:
Corolário 13.20: Sejam Ω ⊂ R2 de classe C 1 (i.e., cuja fronteira é
uma 1-superfı́cie de classe C 1 ) e f : R2 → R2 , f = (f1 , f2 ), função de
classe C 1 de suporte compacto. Então,
Z Z
∂f2
∂f1
f · dγ,
(13.21)
(x, y) −
(x, y) dxdy =
∂x
∂y
Ω
∂Ω
onde a integral de linha acima é calculada percorrendo a fronteira no
sentido anti-hiorário.
Prova: De (13.19) e das propridades do produto tensorial, temos
Z
Z
′
f (x) dx =
f (σ) ⊗ n(σ) dσ,
Z Ω
Z∂Ω
f ′ (x)T dx =
n(σ) ⊗ f (σ) dσ,
Ω
∂Ω
onde n denota o vetor normal unitário exterior em σ ∈ ∂Ω. Subtraindo as identidades acima, obtemos
Z
Z
′
′
T
f (x) − f (x) dx =
f (σ) ∧ n(σ) dσ.
(13.22)
Ω
∂Ω
Observando que
′
f − f ′T =
f ∧n =
0
∂1 f 2 − ∂2 f 1
0
f2 n1 − f1 n2
∂2 f 1 − ∂1 f 2
0
f1 n2 − f2 n1
0
,
,
onde ∂1 e ∂2 denotam respctivamente as derivadas parciais
obtém-se das expressões acima e de (13.22),
Z
Z
∂1 f2 − ∂2 f1 dx =
f2 n1 − f1 n2 dσ.
Ω
∂Ω
∂
∂x
e
∂
∂y ,
Gauss, Green e Stokes
271
Observando ainda que
f2 n1 − f1 n2 = f : (e2 ∧ e1 )n
onde
e2 ∧ e1 =
0
1
−1
0
corresponde a uma rotação de π/2 (no sentido anti-horário), vemos
que (e2 ∧ e1 )n(σ) é um vetor unitário tangente à fronteira de Ω no
ponto σ ∈ ∂Ω.
Corolário 13.21: Seja Ω é um aberto de classe C 1 e f, g duas funções
de classe C 2 com suporte compacto. Então valem as seguintes fórmulas:
Z h
Z
i
∂g
f (x)∆g(x) + ∇f (x) · ∇g(x) dx =
(σ)f (σ) dσ.
Ω
∂Ω ∂n
Z h
i
f (x)∆g(x) − g(x)∆f (x) dx
Ω
Z ∂g
∂f
(σ)f (σ) −
(σ)g(σ) dσ.
=
∂n
∂Ω ∂n
Corolário 13.22: Sejam Ω ⊂ Rn aberto limitado de classe C 1 , f e
g nas condições do Teorema 12.39. Então,
Z
Z
Z
∂f
d
f (t, x) dx =
f (t, σ)v(t, σ) · n(σ) dσ.
(t, x) dx +
dt Ωt
Ωt ∂t
∂Ωt
• Aplicação: as equações dos fluidos perfeitos
Como aplicação do Teorema de Gauss, vamos deduzir as equações
que modelam a dinâmica de fluidos incompressı́veis e não viscosos,
denominados fluidos perfeitos.
Consideremos uma porção do fluido que, num dado instante t,
ocupa a região Ω(t) do espaço e que se desloca segundo um campo de
velocidades u(t, x), u = (u1 , u2 , u3 ). Isso quer dizer que uma qualquer de suas partı́culas individuais descreve uma trajetória P (t) tal
que
dP
= u(t, P).
dt
272
Cálculo Avançado I
Se ρ(t, x) representa a densidade do fluido na posição x e no instante t, então a massa do fluido que ocupa a região Ω(t) é dada por
Z
M (t) =
ρ(t, x) dx.
Ω(t)
A lei de conservação de massa (na ausência de fontes ou sumidouros) se expressa pelo fato de que M (t) é constante no tempo. Nas
condições do Teorema 12.39, essa lei de conservação é dada por (veja
(12.49))
Z
∂ρ
+ div(ρu) dx = 0.
(13.23)
Ω(t) ∂t
Como Ω(t) é arbitrário, temos a equação
∂ρ
+ div(uρ) = 0,
∂t
(13.24)
que exprime a lei de conservação da massa.
Se supusermos que o fluido é incompressı́vel (∂ρ/∂t = 0) e homogêneo (∂ρ/∂xi = 0, i = 1, 2, 3), então ρ(t, x) = ρ0 > 0, a equação
da continuidade se reduz a
div u = 0
(13.25)
e (13.23) se expressa simplesmente por
Z
d
dx = 0,
dt Ω(t)
o que significa que o volume da região Ω(t) não varia no tempo.
A quantidade de movimento do fluido (suposto incompressı́vel) em
Ω(t) é dada por
Z
Z
Q(t) =
ρ(t, x)u(t, x) dx = ρ0
u (t, x) dx.
Ω(t)
Ω(t)
A lei de Newton afirma que a variação da quantidade de movimento
Q (t) é igual a resultante das forças externas que atuam em Ω(t).
′
Gauss, Green e Stokes
273
No problema em questão, podemos supor que as forças externas que
atuam em Ω(t) são F (t) = F 1 (t) + F 2 (t), onde F 1 é a resultante da
ação da gravidade atuando em cada partı́cula do fluido em Ω(t) e F 2
é a resultante das forças de interação do fluido exterior a Ω(t). Como
o campo gravitacional (suposto constante) é dado por g = (0, 0, −g),
onde g é a acelaração da gravidade, temos
Z
Z
ρ0 g dx =
(0, 0, −gρ0) dx = (0, 0, −gM (t)).
F 1 (t) =
Ω(t)
Ω(t)
Para determinar F 2 (t), vamos agora considerar que a viscosidade
do fluido é nula. Esta hipótese significa que o fluido que circunscreve uma dada partı́cula age sobre a mesma exclusivamente por meio
de forças provocadas pela pressão normal, isto é, forças da forma
−pndS, onde p = p(x) é a intensidade de pressão em x. Assim, a
resultante das forças geradas pela pressão agindo nas partı́culas de
Ω(t) é dada por
Z
F 2 (t) = −
p(x)n dS.
∂Ω(t)
e o Teorema de Gauss nos dá
Z
Z
p(x)n dS = −
F 2 (t) = −
∂Ω(t)
Ω(t)
∇p(x) dx.
Portanto, a resultante das forças externas que agem sobre Ω(t) é
Z
F (t) =
ρ0 g − ∇p(x) dx.
Ω(t)
Pela Lei de Newton,
Z
Z
d
ρ0 u dx =
ρ0 g − ∇p(x) dx.
dt Ω(t)
Ω(t)
(13.26)
Vamos agora calcular a derivada do lado esquerdo de (13.26). Para
cada componente ui (t, x) do vetor de velocidade u (t, x), temos pelo
Teorema 12.39,
Z
Z
∂ui
d
ρ0 ui dx =
ρ0
+ div(ui u) dx.
dt Ω(t)
∂t
Ω(t)
274
Mas
Cálculo Avançado I
3
3
X
X
∂
∂ui
div(ui u) =
(ui uj ) =
uj + ui div u
∂xj
∂xj
j=1
j=1
e como div u = 0, temos
Z
Z
3
∂u
X
d
∂ui i
ρ0 ui dx =
ρ0
uj
+
dx.
dt Ω(t)
∂t
∂xj
Ω(t)
j=1
As equações acima podem ser expressas na forma vetorial, isto é,
Z
Z
∂u
d
+ (u · ∇)u dx
(13.27)
ρ0 u dx =
ρ0
dt Ω(t)
∂t
Ω(t)
Como Ω(t) foi escolhido arbitrariamente, temos de (13.26) e (13.27),
1
∂u
+ (u · ∇)u + ∇p = g
∂t
ρ0
(13.28)
que é conhecida como a equação de Euler do movimento do fluido.
As equações (13.25) e (13.28) fornecem as equações gerais para a
dinâmica de fluidos perfeitos, a saber
∂u + (u · ∇)u + 1 ∇p = g ,
∂t
ρ0
(13.29)
div u = 0.
• Aplicação: funções harmônicas e o teorema da média
Como vimos no Capı́tulo 7, o laplaciano de uma função f : Ω → R,
Ω ⊂ Rn aberto, é definido como o traço da matriz hessiana de f , isto
é,
n
X
∂2f
∆f (x) =
(x).
∂x2i
i=1
Uma função f é dita harmônica em Ω se ∆f (x) = 0 para todo x ∈ Ω.
As funções harmônicas desempenham um papel importante em diversas áreas da Matemática e da Fı́sica. Como aplicação do Teorema de
Gauss, demonstraremos o resultado a seguir, denominado Teorema
da Média, uma propriedade fundamental das funções harmônicas.
Gauss, Green e Stokes
275
Teorema 13.23: Seja Ω ⊂ Rn aberto conexo e f : Ω → R função
contı́nua com derivada segunda [f ′′ (x)] contı́nua em Ω. Se ∆f (x) = 0
para todo x ∈ Ω, valem as seguintes propriedades: para todo y ∈ Ω
e R > 0 tal que BR (y) ⊂ Ω,
Z
Z
1
n
f (y) = n−1 n−1
f (σ) dσ = n−1 n
f (x) dx.
|S
|R
|S
|R BR (y)
∂BR (y)
(13.30)
Prova: Faremos a prova em duas etapas.
Etapa 1: Suponhamos inicialmente que 0 ∈ Ω. Seja R > 0 tal que
BR (0) ⊂ Ω. Lembrando que ∆f (x) = div ∇f (x), segue do Teorema
de Gauss,
Z
Z
∇f (σ) · n(σ) dσ =
∆f (x) dx = 0,
(13.31)
∂Bρ (0)
Bρ (0)
para todo ρ ∈ (0, R). Observe que se σ ∈ ∂Bρ (0), então existe um
único ω ∈ ∂B1 (0) tal que σ = ρω e n(σ) = ω. Assim, segundo a
notação introduzida na Observação 12.38 (veja (12.46)), dσ = ρn−1 dω
e (13.31) toma a forma
Z
(13.32)
∇f (ρω) · ω ρn−1 dω = 0.
∂B1 (0)
Como
∂
f (ρω) = ∇f (ρω) · ω,
∂ρ
(13.32) pode ser reescrita como
Z
Z
∂
n−1
n−1 d
ρ
f (ρω) dω = ρ
f (ρω) dω = 0.
dρ ∂B1 (0)
∂B1 (0) ∂ρ
Assim, a função
ρ 7→
Z
f (ρω) dω =
∂B1 (0)
1
ρn−1
Z
f (σ) dσ
∂Bρ (0)
é constante, de modo que
Z
Z
1
1
f (σ) dσ = n−1
f (σ) dσ,
ρn−1 ∂Bρ (0)
R
∂BR (0)
∀ρ ∈ (0, R).
(13.33)
276
Cálculo Avançado I
Pelo Teorema do Valor Médio, (veja (12.14)), existe σρ ∈ ∂Bρ (0) tal
que
Z
Z
f (σ) dσ = f (σρ )
dσ = f (σρ )ρn−1 |Sn−1 |.
∂Bρ (0)
Portanto,
∂Bρ (0)
1
Rn−1
Z
∂BR (0)
f (σ) dσ = f (σρ )|Sn−1 |.
(13.34)
Como kσρ k = ρ e f é contı́nua, temos limρ→0 f (σρ ) = f (0). Logo,
passando ao limite com ρ → 0 em (13.34), obtemos
Z
1
f (0) = n−1 n−1
f (σ) dσ.
(13.35)
|S
|R
∂BR (0)
Por outro lado, substituindo (13.35) em (13.33), obtemos
Z
f (σ) dσ = ρn−1 |Sn−1 |f (0).
∂Bρ (0)
Integrando em ρ os dois lados da equação acima, obtemos
!
Z
Z R Z
Rn n−1
f (x) dx =
f (σ) dσ dρ =
|S
|f (0).
n
BR (0)
∂Bρ (0)
0
(13.36)
Assim, de (13.35) e (13.36), obtemos (13.30) para y = 0.
Etapa 2: No caso geral, seja y ∈ Ω. Considere f0 : Ω0 → R, definida
por f0 (z) = f (z + y), onde
Ω0 = Ω − {y} = z ∈ Rn ; z = x − y, x ∈ Ω .
Então 0 ∈ Ω0 , f0 (0) = f (x), e como
n
X
∂ 2 f0
i=1
∂zi2
(z) =
a conclusão segue da Etapa 1.
n
X
∂ 2f
i=1
∂x2i
(z + y) = 0,
Gauss, Green e Stokes
277
• O Teorema de Stokes
No que segue demonstraremos um resultado importante: o Teorema
de Stokes. Para isso, lembremos que, dado um campo de vetores
f = (f1 , f2 .f3 ), f derivável em dado conjunto aberto Ω, definimos o
rotacional de f o seguinte campo de vetores: rot f : Ω → R3 ,
∂f3
∂f2 ∂f1
∂f3 ∂f2
∂f1
rot f =
−
,
−
,
−
,
(13.37)
∂x2 ∂x3 ∂x3 ∂x1 ∂x1 ∂x2
Teorema 13.24: Sejam Ω ⊂ R2 aberto limitado de classe C 1 , V ⊂
R3 conjunto aberto, f : V → R3 , f = (f1 , f2 , f3 ), um campo de
vetores de classe C 1 em V e γ : [0, 1] → R2 uma curva de Jordan
fechada de classe C 1 . Seja F : U → R3 um mergulho de classe C 2 ,
onde U ⊂ R2 aberto tal que Ω ⊂ U . Se Γ = F ◦ γ, S = F (Ω) e
∂S = F (∂Ω), então
Z
Z
rot f (σ) · n(σ) dσ =
f · d Γ.
(13.38)
S
∂S
Prova: Por definição temos
Z
f · dΓ =
∂S
=
Z 1D
0
Z 1D
0
=
Z 1D
0
E
f Γ(t) ; Γ′ (t) dt
E
f F (γ(t)) ; F ′ (γ(t))γ ′(t) dt
E
F ′ (γ(t))T f F (γ(t)) ; γ ′ (t) dt
Se denotarmos g (u) = F ′ (u)T f F (u) , para u = (u1 , u2 ) ∈ U , temos
Z
S
f · dΓ =
Z
1
0
′
g γ(t) · γ (t) dt =
Z
γ
g · dγ.
Portanto, pelo Teorema de Green 13.20,
Z
Z ∂g2
∂g1
f · dΓ =
(u) −
(u) du1 d2 .
∂u1
∂u2
S
Ω
(13.39)
278
Cálculo Avançado I
Um cálculo direto mostra que
g1 (u) =
3
X
fi F (u)
i=1
g2 (u) =
3
X
fi F (u)
i=1
∂Fi
(u),
∂u1
∂Fi
(u).
∂u2
Como F é de classe C 2 , temos ∂ 2 Fi /∂u1 ∂u2 = ∂ 2 Fi /∂u2 ∂u1 , de
modo que
3
X
∂fi ∂Fj ∂Fi
∂g2
∂g1
∂Fj ∂Fi
−
=
−
∂u1
∂u2 i,j=1 ∂xj ∂u1 ∂u2
∂u2 ∂u1
3
X
∂fi ∂Fj ∂Fi
∂Fj ∂Fi
=
−
∂xj ∂u1 ∂u2
∂u2 ∂u1
(13.40)
i,j=1
i6=j
e
∂1 F2
,
∂2 F2
(13.41)
onde denotamos ∂j Fi = ∂Fi /∂uj . Calculando diretamente o produto
escalar dos vetores (13.37) e (13.41), obtemos
∂F
∂F
×
=
∂u1
∂u1
rot f ·
∂1 F2
∂2 F2
∂F
∂F
×
∂u1
∂u1
∂1 F3
∂ F
, 1 3
∂2 F3
∂2 F3
∂1 F1
∂ F
, 1 1
∂2 F1
∂2 F1
3
X
∂Fj ∂Fi
∂fi ∂Fj ∂Fi
−
=
. (13.42)
∂x
∂u
∂u
∂u
∂u
j
1
2
2
1
i,j=1
i6=j
Logo, de (13.39) e (13.42), temos
Z
Como
S
f ·dΓ =
Z
Ω
rot f ·
∂F
∂F
×
∂u1
∂u1
du1 du2 .
∂F
∂F
∂F
∂F
×
=n
×
.
∂u1
∂u1
∂u1
∂u1
Gauss, Green e Stokes
279
concluı́mos a demonstração.
Observação 13.25: Aplicando-se o Teorema de Partição da Unidade
(veja Teorema 7.17), Podemos estender o Teorema de Stokes para
superfı́cies S de classe C 1 orientáveis com bordo. Observe também
que se a superfı́cie S é fechada (não pussui bordo), então
Z
S
rot f (σ) · n(σ) dσ = 0.
• Operadores diferenciais
Como vimos anteriormente, se V e W são espaços vetoriais normados, Ω ⊂ V é um conjunto aberto e f : Ω → W é uma função
diferenciável, definimos a diferencial de f como a aplicação
f ′ : Ω → L(V, W )
x 7→ f ′ (x)
onde L(V, W ) denota o espaço das aplicações lineares contı́nuas de V
em W .
No caso em que V = Rn e W = R, podemos olhar para a diferencial
como um operador que age no espaço das funções diferenciáveis. Para
detalhar um pouco mais este ponto de vista, consideremos Ω um
conjunto aberto de Rn e
F (Ω) = f : Ω → R ; f é função ,
F k (Ω) = f ∈ F (Ω) ; f é k vezes diferenciável em Ω .
Temos assim a sequência de espaços encaixados:
F (Ω) ⊃ C(Ω) ⊃ F 1 (Ω) ⊃ C 1 (Ω) ⊃ · · ·
Consideremos também os espaços de campos vetoriais
F k (Ω)m = f = (f1 , . . . , fm ) ; fi ∈ F k (Ω)
e os análogos C k (Ω)m .
280
Cálculo Avançado I
Definimos o operador gradiente ∇ : F 1 (Ω) → F (Ω)n por
f 7→ ∇f =
∂f
∂f
,...,
∂x1
∂xn
Considerando as propriedades da diferencial de uma função, podemos reescrever algumas delas sob a ótica do operador ∇: se f, g ∈
F 1 (Ω) e α ∈ R, temos
(1) ∇(f + g) = ∇f + ∇g;
(2) ∇(αf ) = α∇f ;
(3) ∇(f g) = f ∇g + g∇f .
O divergente de um campo vetorial f , definido anteriormente como
o traço da matriz jacobiana de f , pode ser interpretado como o operador diferencial
div : F 1 (Ω)n → F (Ω)
∂fn
∂f1
+···+
div f =
∂x1
∂xn
Vale aqui observar que devido à forma “vetorial” do operador ∇, é
bastante conveniente a notação:
div f = ∇ · f .
É imediato ver que o operador divergente é linear em F 1 (Ω)n e
div(ϕf ) = ∇ϕ · f + ϕ div f .
quaisquer que sejam ϕ ∈ F 1 (Ω) e f ∈ F 1 (Ω)n . Além disso, se f ∈
F 2 (Ω), então
div(∇f ) =
∂ 2f
∂ 2f
+
·
·
·
+
= ∆f
∂x21
∂x2n
o que justifica a seguinte notação bastante comum nos livros de Fı́sica:
div(∇f ) = ∇ · (∇f ) = ∇2 f.
Gauss, Green e Stokes
281
Observação: O Teorema de Gauss nos diz que se f ∈ C 1 (Ω) e U é
um domı́nio limitado de classe C 1 tal que U ⊂ Ω, então
Z
Z
div f (x) dx =
f (σ) · n(σ) dσ.
U
∂U
Como neste caso a aplicação x 7→ div f (x) é contı́nua, temos pelo
Teorema 12.28,
Z
1
lim
f (σ) · n(σ) dσ = div f (x0 ).
(13.43)
U↓x0 c(U ) ∂U
A igualdade (13.43) nos permite definir o divergente de uma campo
f ∈ C(Ω), mesmo que f não seja diferenciável. De fato, podemos
definir o divergente de f como a derivada da função de conjunto
Z
U 7→
f · n dσ.
∂U
A despeito da importância dessa abordagem, não a exploraremos
neste texto.
No caso n = 3, definimos o operador rotacional rot : F 1 (Ω)3 →
F (Ω)3 ,
∂f3
∂f2 ∂f1
∂f3 ∂f2
∂f1
rot f =
−
,
−
,
−
.
∂x2 ∂x3 ∂x3
∂x1 ∂x1
∂x2
Aqui também a forma vetorial do operador ∇ nos remete à notação
rot f = ∇ × f .
Podemos verificar diretamente que o rotacional é operador linear em
F 1 (Ω)3 e
rot(ϕf ) = ∇ϕ × f + ϕ rot f .
quaisquer que sejam ϕ ∈ F 1 (Ω) e f ∈ F 1 (Ω)3 .
Observação: Motivado pelo Teorema de Stokes também é possı́vel
definir o rotacional de um campo vetorial contı́nuo como derivada de
uma função de conjunto, mesmo que o campo não seja diferenciável.
282
Cálculo Avançado I
As seguintes propriedades são imediatas e deixamos ao leitor comprová-las:
Proposição 13.26: Sejam Ω aberto de R3 , ϕ ∈ C 2 (Ω) e f ∈ C 2 (Ω)3 .
Então, rot(∇ϕ) ≡ 0 e div(rot f ) ≡ 0.
Definição: Sejam Ω ⊂ R3 aberto e f ∈ F 1 (Ω)3 . Dizemos que:
(a) f é campo irrotacional em Ω se rot f ≡ 0;
(b) f é campo solenoidal em Ω se div f ≡ 0.
Se f ∈ F (Ω)3 e existe g ∈ F 1 (Ω)3 tal que f = rot g , dizemos que
f é um campo rotacional.
A proposição 13.26 possui uma quase-recı́proca, conforme atesta o
resultado que segue.
Proposição 13.27: Seja Ω um aberto convexo de R3 e f ∈ C 1 (Ω)3 .
Então:
(a) se f é irrotacional em Ω, existe ϕ ∈ C 2 (Ω) tal que ∇ϕ = f .
(b) se f é solenoidal em Ω, existe g ∈ C 2 (Ω)3 tal que rot g = f .
Prova: O item (a) é consequência imediata dos resultados apresentados no Capı́tulo 6 (veja Teorema 6.10 e as observações que seguem),
pois rot f ≡ 0 em Ω equivale a [f ′ (x)] simétrica para todo x ∈ Ω.
Para a prova do item (b), fixemos (a, b, c) ∈ Ω. Seja g = (g1 , g2 , g3 )
o campo definido em Ω por
Z z
Z y
g1 (x, y, z) =
f2 (x, b, s) ds −
f3 (x, s, c) ds,
c
b
Z z Z x
∂f3
g2 (x, y, z) =
(t, y, s) dt ds,
c
a ∂z
Z y Z x
∂f2
g3 (x, y, z) = −
(t, s, z) dt ds
(13.44)
b
a ∂y
Z x
Z y
∂f2
+
f1 (x, t, z) +
(t, s, z)
∂y
b
a
∂f3
+
(t, s, z) dt ds.
∂z
Então, derivando sob o sinal de integral (veja Exercı́cio 12.18), obtemos que rot g = f em Ω.
Gauss, Green e Stokes
283
Observação: A hipótese sobre a convexidade de Ω no Teorema acima
não é necessária. Como vimos no Cap. 6, para o resultado do item (a)
é suficiente que o aberto Ω seja simplesmente conexo. Para o item
(b) a condição simplesmente conexo também não é suficiente (veja
Exercı́cio 13.11).
Campos vetoriais da Fı́sica Matemática
Nesta seção vamos considerar alguns campos vetoriais importantes
da Fı́sica Matemática e apresentar algumas de suas principais propriedades. Para sermos mais especı́ficos, vamos considerar: (1) campos newtonianos; (2) campos de Biot e Savart; e (3) campos harmônicos. Para isso, precisamos preliminarmente estudar algumas propriedades das funções definidas por certas integrais singulares.
• Integrais singulares
Consideremos as funções definidas por integrais singulares do tipo:
Z
ϕ(x, y)
dy,
(13.45)
f (x) =
α
Ω kx − yk
onde Ω ⊂ Rn é um aberto limitado J-mensurável, ϕ : Rn × Rn → R
é contı́nua e limitada, 0 < α < n e k k denota a norma euclidiana de
Rn .
Observação: Se x ∈
/ Ω e ϕ é de classe C 1 , então a função y 7→
ϕ(x, y)kx − yk−α é de classe C 1 em Ω e f é diferenciável (veja Exercı́cio 12.18), com
Z
ϕ(x, y)
∂
′
f (x) =
dy. ∀α.
kx − ykα
Ω ∂x
Para que f esteja bem definida em Ω, a condição α < n é necessária.
Verifique! Como veremos agora, essa condição é também suficiente.
Lema 13.28: Nas condições acima, dado ε > 0, existe δ0 > 0 tal
que, para todo z ∈ Ω e para todo δ ≤ δ0 , tem-se
Z
Ω∩Bδ (z)
ϕ(x, y)
dy < ε.
kx − ykα
(13.46)
284
Cálculo Avançado I
Prova: Seja ε > 0. Por hipótese, existe C0 > 0 tal que |ϕ(x, y)| ≤ C0
para todo (x, y) ∈ Rn × Rn . Se z = x temos, para R > 0,
Z
Ω∩BR (x)
ϕ(x, y)
dy ≤ C0
kx − ykα
Z
1
dy
α
BR (x) kx − yk
Z R
n−1
= C0 |S
|
ρn−α−1 dρ ,
(13.47)
0
n−1
=
C0 |S
| n−α
R
n−α
onde |Sn−1 | = 2π n/2 /Γ(n/2). Assim, podemos determinar R0 > 0 tal
que (13.46) se verifica (com z = x), para todo R ≤ R0 .
Consideremos agora z ∈ B2R0 /3 (x) e δ ≤ R0 /3. Como Bδ (z) ⊂
BR0 (x), é fácil ver que (13.46) se verifica.
Por outro lado, se kz − xk ≥ 2R0 /3 e δ ≤ R0 /3, vemos que Bδ (z) ∩
BR0 /3 (x) = ∅. Logo, ky − xk ≥ R0 /3 para todo y ∈ Bδ (z), de modo
que
|ϕ(x, y)|
C0 3α
≤
= C1 .
kx − ykα
R0α
Portanto,
Z
Ω∩Bδ (z)
ϕ(x, y)
C1 |Sn−1 |δ n
dy
≤
kx − ykα
n
e concluı́mos a prova com a escolha
δ0 = min
(
R0
,
3
nε
C1 |Sn−1 |
1/n )
.
Observação: Decorre do lema acima que a função dada por (13.45)
está bem definida em Rn .
Gauss, Green e Stokes
285
Teorema 13.29: Seja ϕ : Rn × Rn → R contı́nua e limitada. Se
0 < α < n, então a função f definida por (13.45) é contı́nua em Rn .
Prova: Para cada R > 0, definimos hR : R+ → R a função
hR (s) =
1/sα
1/Rα
se s ≥ R,
se s ≤ R.
Seja ϕR (x, y) = hR kx − yk ϕ(x, y). É claro que ϕR é contı́nua em
Rn × Rn . Seja fR : Rn → R a função definida por
fR (x) =
Z
ϕR (x, y) dy.
Ω
Então fR é contı́nua e converge uniformemente para f em Rn , quando
R tende a zero. De fato, se C0 = sup{|ϕ(x, y)| ; (x, y) ∈ Rn × Rn },
temos
Z
hR (kx − yk) − hR (kx0 − yk) dy
|fR (x) − fR (x0 )| ≤ C0
Ω
Z
1
|ϕ(x, y) − ϕ(x0 , y)|dy.
+ α
R Ω
Observe que, para cada y ∈ Ω fixado, temos
hR (kx − yk) − hR (kx0 − yk) ≤
α
Rα+1
kx − x0 k.
Logo, dado ε > 0, existe δ1 > 0 tal que, para todo δ ≤ δ1 ,
Z
Ω
hR (kx − yk) − hR (kx0 − yk) dy ≤
αc(Ω)
ε
kx − x0 k <
α+1
R
2C0
se kx − x0 k < δ, onde c(Ω) denota o conteúdo de Jordan de Ω.
Por outro lado, ϕ é uniformemente contı́nua em Bδ1 (x0 ) × Ω, de
modo que existe δ2 > 0 tal que para todo δ ≤ δ2 ,
|ϕ(x, y) − ϕ(x0 , y)| <
ε
.
2c(Ω)
286
Cálculo Avançado I
Assim,
Z
Ω
|ϕ(x, y) − ϕ(x0 , y)|dy <
ε
2
se kx − x0 k < δ. Logo, para δ ≤ δ0 = min{δ1 , δ2 }, tem-se
kx − x0 k < δ ⇒ |fR (x) − fR (x0 )| < ε.
u
Para mostrar que fR −→
f em Rn , observe que
fR (x) − f (x) =
Z
BR (x)
1
1
ϕ(x, y) dy.
−
Rα
kx − ykα
Portanto, pelo Lema 13.28 (veja (13.47), temos
1
1
n−1
|fR (x) − f (x)| ≤ C0 |S
|
−
Rn−α , ∀x ∈ Rn .
n−α n
Teorema 13.30: Seja ϕ : Rn × Rn → R contı́nua e limitada tal que
∂ϕ/∂x é contı́nua e limitada em Rn × Rn . Se 0 < α < n − 1, então a
função f definida por (13.45) é diferenciável em Rn e
Z
∂
ϕ(x, y)
′
f (x) =
dy.
α
Ω ∂x kx − yk
Prova: Primeiramente, observemos que se x 6= y,
∂
1
−α
=
(x − y).
α
∂x kx − yk
kx − ykα+2
Logo, para todo x 6= y,
∂ ϕ(x, y)
−αϕ(x, y)
1
∂ϕ
=
(x
−
y)
+
(x, y).
∂x kx − ykα
kx − ykα+2
kx − ykα ∂x
Pela limitação de ϕ e de sua derivada parcial ∂ϕ/∂x, existe C1 > 0
tal que
1
1
∂ ϕ(x, y)
≤ C1
+
.
∂x kx − ykα
kx − ykα+1
kx − ykα
Gauss, Green e Stokes
287
Como estamos supondo α + 1 < n, podemos aplicar o Teorema 13.29
para concluir que a função fe : Rn → R dada por
Z
∂
ϕ(x,
y)
fe(x) =
dy
α
Ω ∂x kx − yk
está bem definida e é contı́nua em Rn .
Para R > 0, consideremos hR : R+ → R definida por
1/sα
se s ≥ R,
hR (s) =
2
a − bs se s ≤ R,
onde a = (2 + α)/2Rα e b = α/2Rα+2 . Então é fácil ver que hR é de
classe C 1 em R+ e
−α/sα+1
se s ≥ R,
′
hR (s) =
(13.48)
α+2
−αs/R
se s ≤ R.
Observe que
0 < hR (s) ≤
α+2
2Rα
e
|h′R (s)| ≤
α
Rα+1
,
∀ s ≥ 0.
(13.49)
Considere ϕR : Rn × Rn → R, ϕR (x, y) = hR kx − yk ϕ(x, y). Se
fR : Rn → R é definida por
Z
fR (x) =
ϕR (x, y) dy,
Ω
obtemos, com argumentos análogos ao empregados na prova do Teorema 13.29, que fR é contı́nua e converge uniformemente para f em
Rn . Como ϕR é função de classe C 1 , temos (veja o Exercı́cio 5.13),
Z
∂ϕR
′
fR (x) =
(x, y) dy.
Ω ∂x
Como hR kx − yk = kx − yk−α se kx − yk ≥ R, temos
fR′ (x)
− fe(x) =
Z
BR (x)
∂
∂x
hR kx − yk −
1
kx − ykα
ϕ(x, y) dy.
288
Cálculo Avançado I
Por hipótese, existem constantes C0 > 0 e C1 > 0 tais que
|ϕ(x, y)| ≤ C0 ,
∂ϕ
(x, y) ≤ C1 ,
∂x
∀(x, y) ∈ Rn × Rn .
Além disso, se 0 < kx − yk < R, temos de (13.48),
∂
α
hR kx − yk = − α+2 (x − y).
∂x
R
Logo, para todo x ∈ Rn ,
kfR′ (x)
1
1
+
Rn−α−1
n−α−1 n
1
α+2
n−1
+ C1 |S
|
+
Rn−α
2n
n−α
− fe(x)k ≤ C0 α|Sn−1 |
u
Portanto, fR′ −→
fe em Rn e, pelo Teorema 10.10, concluı́mos que f
é diferenciável e f ′ (x) = fe(x) para todo x ∈ Rn .
• Campos Newtonianos
No que segue, Ω ⊂ Rn (n ≥ 2) denota um domı́nio (i.e., aberto
conexo) limitado e J-mensurável.
Definição: Dizemos que um campo vetorial g : Rn → Rn é newtoniano se é da forma
g (x) = −
Z
Ω
ϕ(y)
(x − y) dy,
kx − ykn
(13.50)
onde ϕ : Ω → R é função contı́nua.
Observação: Segundo a lei da gravitação de Newton, uma partı́cula
de massa m situada no ponto y ∈ R3 exerce uma força de atração
sobre uma partı́cula P de massa unitária situada em x 6= y, dada
pela fórmula
m
g (x) = −
(x − y).
kx − yk3
Gauss, Green e Stokes
289
No caso de k partı́culas de massa m1 , . . . , mk situadas respectivamente em y1 , . . . , yk , a resultante das forças que agem sobre a partı́cula P em x 6= yi , é dada por
g (x) = −
k
X
i=1
mi
(x − yi ).
kx − yi k3
(13.51)
Se B é um corpo fı́sico ocupando uma região Ω de R3 , podemos
deduzir a força que ele exerce sobre P situada em x ∈
/ Ω a partir da
fórmula (13.51). De fato, supondo que a densidade de massa do corpo
seja dada pela função ϕ : Ω → R, podemos imaginar uma partição que
divide Ω em k pavês ∆Ωi , cada um dos quais ocupados por pequenas
partes Bi do corpo. Essas pequenas partes exercem atração sobre P
cuja resultante é dada por (13.51), onde mi = ϕ(yi )∆Vi , yi ∈ ∆Ωi e
∆Vi denota o volume de ∆Ωi . Nessas condições, a fórmula (13.51) se
expressa por
g (x) = −
k
X
i=1
ϕ(yi )
(x − yi )∆Vi ,
kx − yi k3
que corresponde a uma soma de Riemann de (13.50).
Vejamos então algumas propriedades matemáticas dos campos newtonianos. A primeira delas, como demonstraremos a seguir, nos diz
que todo campo newtoniano é gradiente.
Observação 13.31: Todo campo newtoniano é uma função contı́nua
de Rn em Rn . De fato, se g = (g1 , . . . , gn ), podemos escrever
Z
ψi (x, y)
gi (x) =
dy,
(13.52)
n−1/2
Ω kx − yk
onde
ψi (x, y) = ϕ(y)
(yi − xi )
kx − yk1/2
é contı́nua em Ω (verifique). Pelo Teorema de Tietze (veja Teorema 10.13), ψ pode ser estendida a uma função contı́nua e limitada
em Rn × Rn , de modo que, considerando essa extenção, o integrando
em (13.52) satisfaz as hipóteses do Teorema 13.29.
290
Cálculo Avançado I
Proposição 13.32: Seja n ≥ 3 e f : Rn → R definida por
1
f (x) =
n−2
Z
ϕ(y)
dy.
kx − ykn−2
Ω
(13.53)
Então f é de classe C 1 em Rn e f ′ (x) = g (x), ∀x ∈ Rn . Além disso,
f é de classe C ∞ e harmônica em Rn \ Ω.
Prova: Como α = n − 2 < n − 1, o Teorema 13.30 se aplica. Como
∂
∂x
ϕ(y)
kx − ykn−2
= (2 − n)
ϕ(y)
(x − y),
kx − ykn
temos f ′ (x) = g (x) para todo x ∈ Rn .
Se x ∈
/ Ω, então y 7→ ϕ(y)kx − yk−n (x − y) é de classe C ∞ em Ω e
podemos derivar sob o sinal de integral. Assim,
∆f (x) = div g (x) = −
Z
ϕ(y) div
Ω
x−y
kx − ykn
dy
e concluı́mos a prova, pois, para cada y fixado,
div
x−y
kx − ykn
= 0,
∀x 6= y.
Observção: O caso n = 2, que deixamos como exercı́cio ao leitor,
segue de modo semelhante, com a função potencial dada for
f (x) =
Z
Ω
ϕ(y) ln
1
kx − yk
dy.
(13.54)
Observemos que as componentes gi (i = 1, . . . , n) do campo g não
satisfazem as hipóteses do Teorema 13.30. Entretanto, como veremos
em seguida, se Ω é regular e se ϕ é de classe C 1 em Ω, então g também
é de classe C 1 em Ω.
Gauss, Green e Stokes
291
Lema 13.33: Seja Ω ⊂ Rn aberto limitado de classe C 1 . Suponha
ϕ : Ω → R contı́nua, de classe C 1 em Ω e tal que ϕ(σ) = 0, ∀σ ∈ ∂Ω.
Então,
Z
1
ϕ′ (y)
g (x) =
dy,
(13.55)
n − 2 Ω kx − ykn−2
g é de classe C 1 em Ω e
′
g (x) = −
Z
Ω
′
1
ϕ
(y)
⊗
(x
−
y)
dy.
kx − ykn
Em particular, para todo x ∈ Ω,
div g (x) = −
Z
Ω
h∇ϕ(y) : (x − y)i
dy.
kx − ykn
Prova: Seja ε > 0 tal que Bε (x) ⊂ Ω e considere
Mε = sup{|ϕ(y)| ; y ∈ Bε (x)}.
Então,
Z
y−x
ϕ(y)
dy ≤ Mε
ky − xkn
Bε (x)
Z
1
dy
n−1
Bε (x) ky − xk
Z ε
n−1
= Mε |S
|
dρ
(13.56)
0
n−1
= Mε |S
Z
|ε,
∂
1
ϕ(y)
dy
∂y ky − xkn−2
Ω\Bε (x)
Z
−1
∂
ϕ(y)
=
dy
n − 2 Ω\Bε (x) ∂y ky − xkn−2
Z
1
ϕ′ (y)
+
dy
n − 2 Ω\Bε (x) ky − xkn−2
(13.57)
y−x
−1
ϕ(y)
=
n
ky − xk
n−2
Ω\Bε (x)
Z
292
Cálculo Avançado I
Pelo Teorema de Gauss, e lembrando que ϕ(σ) = 0 sobre ∂Ω, obtemos
Z
Ω\Bε (x)
∂
∂y
ϕ(y)
ky − xkn−2
dy =
Z
∂ Ω\Bε (x)
= −
Z
ϕ(σ)
n(σ) dσ
kσ − xkn−2
ϕ(σ)
n(σ) dσ.
kσ − xkn−2
∂Bε (x)
Portanto,
Z
Ω\Bε (x)
∂
∂y
ϕ(y)
ky − xkn−2
dy ≤
Z
∂Bε (x)
Mε
≤ n−2
ε
Z
|ϕ(y)|
dσ
ky − xkn−2
∂Bε (x)
dσ = Mε |Sn−1 |ε.
(13.58)
Fazendo ε → 0, em (13.56), (13.57) e (13.58), obtemos para x ∈ Ω,
1
g (x) =
n−2
Z
Ω
ϕ′ (y)
dy.
kx − ykn−2
Podemos agora aplicar o Teorema 13.30 em cada componente de g .
A condição ϕ(σ) = 0 sobre a fronteira foi necessária para se obter a
fórmula (13.55), da qual se conclui via Teorema 13.32 a regularidade
C 1 do campo g . Entretanto, ela não é uma condição necessária para
essa regularidade, como vemos pelo teorema seguinte.
Teorema 13.34: Seja Ω ⊂ Rn aberto limitado de classe C 1 . Suponhamos ϕ : Ω → R contı́nua e de classe C 1 em Ω. Então, g ∈ C 1 (Ω)
e
div g (x) = −|Sn−1 |ϕ(x), ∀x ∈ Ω.
(13.59)
Prova: Faremos a prova em duas etapas.
Etapa 1: g é de classe C 1 em Ω. De fato, fixemos x0 ∈ Ω e r > 0 tal
que B2r (x0 ) ⊂ Ω. Seja ρ : R → R função de classe C 1 (R) tal que
ρ(s) =
1 se |s| < r,
0 se |s| > 2r
Gauss, Green e Stokes
293
e defina ϕr : Ω → R por ϕr (y) = ϕ(y)ψ ky − x0 k . Como ϕr (σ) = 0
para σ ∈ ∂Ω segue do Lema 13.33 que
g r (x) = −
Z
Ω
ϕr (y)
(x − y) dy = −
kx − ykn
Z
B2r (x0 )
ϕr (y)
(x − y) dy
kx − ykn
é campo newtoniano de classe C 1 em Ω e, em particular, em Br (x0 ).
Por outro lado, se denotarmos Ωr = Ω \ B2r (x0 ), segue da Proposição 13.32 que o campo
ge r (x) = −
Z
Ω
ϕ(y) − ϕr (y)
(x − y) dy = −
kx − ykn
Z
Ωr
ϕ(y) − ϕr (y)
(x − y) dy
kx − ykn
é de classe C ∞ no complementar de Ωr e, em particular, de classe
C 1 em Br (x0 ). Como g (x) = g r (x) + ge r (x), concluı́mos que g é de
classe C 1 em Br (x0 ) e como x0 foi tomado arbitrariamente em Ω, a
prova está feita.
Etapa 2: Vamos então provar (13.59). Seja x1 ∈ Ω e r > 0 tal que
Br = Br (x1 ) ⊂ Ω. Pelo Teorema de Gauss,
Z
Z
g (σ) · n(σ) dσ
Z
Z
ϕ(y)
= −
(σ − y) dy · n(σ) dσ.
n
∂Br
Ω kσ − yk
div g (x) dx =
Br
∂Br
Pelo Teorema de Fubini, obtemos
Z
Z
Z
div g (x) dx = −
ϕ(y)
Br
Ω
∂Br
(σ − y) · n(σ)
dσ dy. (13.60)
kσ − ykn
Observe que, para y ∈ Ω fixado,
Z
∂Br
(σ − y) · n(σ)
dσ =
kσ − ykn
Como
div
Z
div
Br
x−y
kx − ykn
=0
x−y
kx − ykn
∀x 6= y,
dx.
(13.61)
294
Cálculo Avançado I
obtemos de (13.61),
Z
∂Br
(σ − y) · n(σ)
dσ = 0,
kσ − ykn
∀y ∈
/ Br .
Se y ∈ Br , tome ε > 0 tal que Bε (y) ⊂ Br . Então
Z
x−y
div
=0
kx − ykn
Br \Bε (y)
e obtemos do Teorema de Gauss,
Z
Z
(σ − y) · n (σ)
(σ − y) · n(σ)
dσ =
dσ = |Sn−1 |.
n
kσ − yk
kσ − ykn
∂Br
∂Bε (y)
(13.62)
Substituindo (13.62) em (13.60), obtemos
Z
Z
(σ − y) · n(σ)
n−1
dσ = −|S
|
ϕ(y) dy.
kσ − ykn
∂Br
Br
Dividindo ambos os lados da igualdade acima pelo conteúdo de Br e
passando ao limite quando r → 0, obtemos
div g (x1 ) = −|Sn−1 |ϕ(x1 )
e a prova está concluı́da, pois x1 foi fixado arbitrariamente em Ω.
Observação 13.35: Nas condições do Teorema 13.34, a função potencial f (x) : Rn → R definida por (13.53) (ou (13.54) no caso n = 2)
satisfaz a seguinte propriedade:
n−1
|ϕ(x) se x ∈ Ω,
−∆f (x) = |S
0
se x ∈
/ Ω.
Isso nos sugere uma “estratégia” para resolver o problema de Dirichlet para a equação de Poisson:
Problema: dado ϕ : Ω → R contı́nua, de classe C 1 em Ω
e ψ : ∂Ω → R contı́nua, determinar f : Ω → R solução do
problema de contorno:
(
−∆f (x) = ϕ(x), x ∈ Ω
(13.63)
f (σ) = ψ(σ), σ ∈ ∂Ω.
Gauss, Green e Stokes
295
De fato, se f0 é uma função harmônica em Ω, segue de (13.59) que
1
f (x) = f0 (x) +
(n − 2)|Sn−1 |
Z
Ω
ϕ(y)
dy
kx − ykn−2
é solução da equação em (13.63). Assim, se podemos determinar uma
f0 tal que
1
f0 (σ) = ψ(σ) −
(n − 2)|Sn−1 |
Z
Ω
ϕ(y)
dy,
kσ − ykn
∀σ ∈ ∂Ω
então f será solução do problema de Dirichlet (13.63).
• Campos de Biot e Savart
No que segue, Ω ⊂ R3 denota um domı́nio limitado de classe C 1 .
Definição: Dizemos que g : R3 → R3 e um campo de Biot e Savart
se é da forma
Z
v (y) × (x − y)
g (x) =
dy,
(13.64)
kx − yk3
Ω
onde v : Ω → R3 é função contı́nua.
Observação: Os campos de Biot e Savart têm sua origem na eletrodinâmica e descrevem o campo magnético gerado pela corrente
elétrica em um corpo condutor situado em Ω. Neste caso, v (y) descreve a densidade de corrente elétrica em y ∈ Ω.
Observe que todo campo de Biot e Savart é função contı́nua em R3
(veja Obs. 13.31) e, como veremos a seguir, g admite um potencial
vetorial, isto é, existe um campo h tal que g (x) = rot h(x), para
todo x ∈ Ω.
Proposição 13.36: Seja h : R3 → R3 definida por
h (x) =
Z
Ω
v (y)
dy.
kx − yk
(13.65)
Então h é de classe C 1 em R3 e rot h(x) = g (x), ∀x ∈ Ω. Além disso,
h é de classe C ∞ e harmônica em R3 \ Ω. Em particular, div g = 0
em R3 .
296
Cálculo Avançado I
Prova: Por definição, h = (h1 , h2 , h3 ), com
hi (x) =
Z
Ω
vi (y)
dy.
kx − yk
Observe que cada componente de h é um potencial newtoniano. Pelo
Teorema 13.30, hi é diferenciável em R3 e
Z
∂hi
vi (y)(xj − yj )
(x) = −
dy,
∂xj
kx − yk3
Ω
isto é,
′
h (x) =
Z
Ω
Logo,
rot h(x) =
Z
Ω
v (y) ⊗ (x − y)
dy,
kx − yk3
v (y) × (x − y)
dy = g (x),
kx − yk3
(13.66)
∀x ∈ R3
com o que concluı́mos a prova.
A fórmula (13.66) nos dá diretamente a seguinte expressão para o
divergente do campo potencial (13.65):
div h (x) = −
Z
Ω
v (y) · (x − y)
dy.
kx − yk3
Nas aplicações da eletrodinâmica, a conservação da carga elétrica em
Ω implica que o campo de densidade de corrente elétrica é solenoidal
(isto é, div v (y) = 0 em Ω) e v (σ) · n(σ) = 0 para todo σ ∈ ∂Ω. Essas
condições implicam que o campo potendial h também é solenoidal.
Mais precisamente:
Proposição 13.37: Seja Ω ⊂ Rn aberto limitado de classe C 1 . Suponhamos v : Ω → R3 contı́nua e de classe C 1 em Ω satisfazendo as
seguintes propriedades:
div v (y) = 0, ∀y ∈ Ω,
Então div h(x) = 0,
∀x ∈ Ω.
e
v (σ) · n(σ) = 0, ∀σ ∈ ∂Ω.
Gauss, Green e Stokes
297
Prova: Os argumentos da prova do Lema 13.33 podem ser repetidos
aqui para justificar os seguintes cálculos formais:
Z
Z
∂hi
1
1
∂
∂
(x) =
vi (y)
dy = − vi (y)
dy
∂xi
∂xi kx − yk
∂yi kx − yk
Ω
Ω
Z
Z
∂
vi (y)
∂vi
1
= −
dy +
(y)
dy
kx − yk
kx − yk
Ω ∂yi
Ω ∂yi
Z
Z
vi (σ)ni (σ)
∂vi
1
(y)
= −
dy +
dy.
kx − yk
∂Ω kσ − yk
Ω ∂yi
Somando em i na igualdade acima, obtemos
Z
Z
v (σ) · n(σ)
div v (y)
div h(x) = −
dy +
dy = 0
kσ − yk
∂Ω
Ω kx − yk
como querı́amos provar.
Corolário 13.38: Nas condições da Proposição 13.37, temos, para
todo x ∈ Ω,
−∆hi (x) = 4πvi (x) e
rot g (x) = 4πv (x).
(13.67)
Prova: Para mostrar a primeira igualdade em (13.67), basta observar
que as componentes de h são potenciais de campos newtonianos em
R3 e a conclusão segue da Observação 13.35.
Para mostrar a segunda igualdade, lembremos que
rot g = rot rot h = ∇ div h − ∆h (x)
e concluı́mos a prova.
• Campos Harmônicos
Seja Ω ⊂ Rn um domı́nio limitado de classe C 1 .
Definição: Dizemos que g : Ω → Rn é um campo harmônico se g é
diferenciável em Ω e satisfaz as seguintes condições: para todo x ∈ Ω,
(1)
(2)
div g (x) = 0,
′ g (x) é simétrico.
298
Cálculo Avançado I
Observe que no caso n = 3, a condição (2) equivale a rot g (x) = 0
para todo x ∈ Ω. Observe também que todo campo newtoniano
é harmônico no aberto Rn \ Ω, assim como todo campo de Biot e
Savart o é em R3 \ Ω.
Se Ω é simplesmente conexo, a condição (2) implica que g é campo
gradiente. Logo, existe f : Ω → R tal que g = f ′ em Ω e a condição
(1) implica que f é função harmônica em Ω. Assim, temos o seguinte
resultado:
Proposição 13.39: Seja Ω ⊂ Rn um domı́nio simplesmente conexo
de classe C 1 . Um campo g : Ω → Rn é harmônico em Ω se, e somente
se, existe f : Ω → R função harmônica tal que g = f ′ .
• O problema inverso da Análise Vetorial
Em algumas aplicações importantes da Fı́sica, deseja-se determinar
um campo vetorial f para o qual é conhecido seu divergente e seu
rotacional. Mais precisamente, sejam Ω ⊂ R3 aberto, h : Ω → R e
g : Ω → R3 funções contı́nuas. Consideremos:
Problema: determinar f : Ω → R3 tal que
(
div f (x) = h(x),
∀x ∈ Ω.
rot f (x) = g (x),
(13.68)
Sob certas condições podemos determinar a solução geral deste problema com base no que vimos nas subseções anteriores deste capı́tulo.
De fato, suponhamos h e g funções diferenciáveis. Pela Proposição 13.26, div g (x) = 0 para todo x ∈ Ω é uma condição necessária
para que o problema tenha solução. Suponhamos que g (σ) · n(σ) = 0
para todo σ ∈ ∂Ω.
Podemos então determinar uma solução particular de (13.68). De
acordo com a Proposição 13.32 e o Teorema 13.34, o campo newtoniano
Z
1
h(y)
f 1 (x) =
(x − y) dy
4π Ω kx − yk3
é solução de (13.68) no caso particular g ≡ 0 em Ω. Por outro lado,
pela Proposição 13.37 e o Corolário 13.38, o campo de Biot e Savart
Z
1
g (y) × (x − y)
f 2 (x) =
dy
4π Ω
kx − yk3
Gauss, Green e Stokes
299
é solução do problema no caso particular em que h ≡ 0 em Ω. Portanto, o campo f = f 1 + f 2 é uma solução particular do problema
em questão.
É claro que se somarmos um campo harmônico ao f acima definido,
temos ainda uma solução do problema em questão. Logo, a solução
geral de (13.68) é
1
f (x) =
4π
Z Ω
h(y)
g (y) × (x − y)
dy + h(x),
(x − y) +
kx − yk3
kx − yk3
onde h é uma campo harmônico qualquer.
Os resultados acima estão intimamente relacionados à reslução das
equações estacionárias de Maxwell. Ao leitor interessado, recomendo
a consulta de [2] e sua bibliografia.
Formas diferenciais: uma breve introdução
Nesta Seção vamos apresentar uma introdução muito breve sobre as
formas diferenciais tendo como único objetivo despertar a curiosidade
e a motivação do leitor para um estudo mais aprofundado deste tema.
Se Ω ⊂ Rn é um aberto e f : Ω → R é função diferenciável em Ω,
então existe f ′ : Ω → L(Rn ; R) tal que, a cada x ∈ Ω, associa-se a
transformação linear f ′ (x). Além disso, fixada a base canônica em
Rn , temos
f ′ (x)(h) =
∂f
∂f
(x)h1 + · · · +
(x)hn = ∇f (x) : h .
∂x1
∂xn
Se denotarmos dxi : Rn → R a transformação linear (ou forma linear)
definida por dxi (h) = hi , podemos considar a forma linear
df (x) =
∂f
∂f
(x)dx1 + · · · +
(x)dxn ,
∂x1
∂xn
(13.69)
de modo que df (x)(h) = f ′ (x)(h).
Observe que {dx1 , . . . , dxn } assim definido é uma base de L(Rn , R).
De fato, quando fazemos a identificação L(Rn , R) = Rn via o produto
300
Cálculo Avançado I
escalar usual, temos dx1 = (1, 0, . . . , 0), . . . , dxn = (0, 0, . . . , 1). Logo,
uma forma linear qualquer pode ser expressa como uma combinação
linear dos elementos dessa base:
L(h) =
n
X
ai ∈ R.
ai dxi (h),
i=1
Quando os coeficientes de L são funções de x, dizemos que L é uma
forma diferencial de ordem um, ou simplesmente uma 1-forma. Assim, (13.69) é um caso particular de uma 1-forma, dita uma 1-forma
exata. Como estamos interessados em integrais, vamos supor que os
tais coeficientes ai (x) são funções (no mı́nimo) contı́nuas.
Definição: Dado Ω aberto de Rn e ai : Ω → R, i = 1, . . . , n, funções
contı́nuas, a aplicação
ω : Ω → L(Rn , R),
ω(x) =
n
X
ai (x) dxi
i=1
é denominada 1-forma diferencial.
As 1-formas diferenciais definem funções de conjunto quando associadas a integrais de linha. De fato, seja Γ o conjunto das curvas
de classe C 1 em Ω e ω uma 1-forma. Se γ : [a, b] → R é uma curva
de Γ, definimos
F (γ) =
Z
γ
a1 dx1 + · · · + an dxn =
Nesta caso, é usual denotar F (γ) =
R
γ
Z
n
bX
a i=1
ai γ(t) γi′ (t) dt.
ω.
O produto exterior de L1 e L2 (veja Apêndice) é a forma bilinear
alternada, definida por
∧ : L(R2 , R) × L(R2 , R) → A2 (R2 ),
L1 ∧ L2 =
a1
a2
b1
dx1 ∧ dx2 ,
b2
onde A2 (R2 ) denota o espaço das formas bilinerares alternadas de R2
e Li = ai dx1 + bi dx2 , i = 1, 2.
Gauss, Green e Stokes
301
Com base nesta definição, podemos estender o produto acima para
as 1-formas. Se
ωi : Ω → L(R2 , R),
ωi (x) = ai (x) dx1 + bi (x) dx2 ,
i = 1, 2,
definimos o produto ω1 ∧ ω2 : Ω → A2 (R2 ), por
a1 (x) b1 (x)
dx1 ∧ dx2 .
a2 (x) b2 (x)
(ω1 ∧ ω2 )(x) =
(13.70)
Não é difı́cil mostrar que conjunto A2 (R3 ) das formas 2-lineares
alternadas de R3 é um espaço vetorial de dimensão três. Assim (veja
Apêndice), se Li = ai dx1 + bi dx2 + ci dx3 , definimos o produto exterior
∧ : L(R3 , R) × L(R3 , R) → A2 (R3 ),
L1 ∧ L2 =
a1
a2
b1
a
dx1 ∧ dx2 + 1
b2
a2
b
+ 1
b2
c1
dx1 ∧ dx3
c2
c1
dx2 ∧ dx3 .
c2
(13.71)
No caso em que os coeficientes ai são funções contı́nuas em Ω ⊂ R3 ,
a expressão (13.71) define o que chamamos de 2-forma diferencial em
R3 .
Definição: Dado Ω aberto de R3 e ai : Ω → R, i = 1, 2, 3, funções
contı́nuas, a aplicação
ω : Ω → A2 (R3 ),
ω = a1 dx1 ∧ dx2 + a2 dx1 ∧ dx3 + a3 dx2 ∧ dx3
é denominada 2-forma diferencial em Ω.
Vejamos como as 2-formas diferenciais têm (tudo) a ver com integrais de superfı́cie em R3 . Seja S uma superfı́cie de classe C 1 contida
no aberto Ω ⊂ R3 e parametrizada pelo mergulho
ϕ : U → R3 ,
U ⊂ R2 aberlo limitado.
Sabemos que o fluxo de um campo contı́nuo f : Ω → R3 através de
S é definido pela integral de superfı́cie
Z
Z
∂ϕ
∂ϕ
du1 du2 .
f (σ) · n (σ) dσ =
f (ϕ) ·
×
(13.72)
∂u1
∂u2
S
U
302
Cálculo Avançado I
Consideremos x1 = ϕ1 (u1 , u2 ), x2 = ϕ2 (u1 , u2 ), x3 = ϕ3 (u1 , u2 ) e
x = (x1 , x2 , x3 ). Se ϕ = (ϕ1 , ϕ2 , ϕ3 ), então
∂ϕ
∂ϕ
×
=
∂u1
∂u2
∂1 ϕ2
∂2 ϕ2
∂1 ϕ3
∂ ϕ
,− 1 1
∂2 ϕ3
∂2 ϕ1
∂1 ϕ3
∂ ϕ
, 1 1
∂2 ϕ3
∂2 ϕ1
∂1 ϕ2
∂2 ϕ2
,
onde ∂i ϕj = ∂ϕj /∂ui . Portanto, se considerarmos as formas diferenciais
∂ϕi
∂ϕi
dxi =
du1 +
du2 ,
∂u1
∂u2
obtemos as seguintes expressões:
dx1 ∧ dx2 =
∂1 ϕ1
∂1 ϕ2
∂2 ϕ1
du1 ∧ du2 = −dx2 ∧ dx1 ,
∂2 ϕ2
dx1 ∧ dx3 =
∂1 ϕ1
∂1 ϕ3
∂2 ϕ1
du1 ∧ du2 = −dx3 ∧ dx1 ,
∂2 ϕ3
dx2 ∧ dx3 =
∂1 ϕ2
∂1 ϕ3
∂2 ϕ2
du1 ∧ du2 = −dx3 ∧ dx2 ,
∂2 ϕ3
e podemos expressar (13.72) na forma
Z
S
f3 dx1 ∧ dx2 − f2 dx1 ∧ dx3 + f1 dx2 ∧ dx3 ,
de modo que
Z
S
f · n dσ =
Z
(13.73)
ω,
S
sendo, neste caso,
ω(x) = f3 (x) dx1 ∧ dx2 − f2 (x) dx1 ∧ dx3 + f1 (x) dx2 ∧ dx3 .
Observação 13.40: Podemos verificar que existe uma certa semelhança entre o produto de duas 1-formas diferenciais com o produto
vetorial em R3 (veja Apêndice). De fato, assim como a “regra da mão
direita” nos permite definir um “sentido positivo” para o produto
vetorial, de tal forma que e 1 × e 2 = e 3 , e 2 × e 3 = e 1 e e 3 × e 1 = e 2 ,
Gauss, Green e Stokes
303
podemos convencionar também a “regra da mão direita” para as 1formas, de tal modo que (13.73) se expressa positivamente por
ω = f1 (x) dx2 ∧ dx3 + f2 (x) dx3 ∧ dx1 + f3 (x) dx1 ∧ dx2 .
(13.74)
Lembrando que f (x) = f1 (x)e 1 + f2 (x)e 2 + f3 (x)e 3 , podemos fazer
a seguinte associação: e 1 ↔ dx2 ∧ dx3 , e 2 ↔ dx3 ∧ dx1 , e e 3 ↔
dx1 ∧ dx2 . Com essas convenções, temos
Z
Z
(f · n) dσ =
f1 (x) dx2 ∧ dx3 + f2 (x) dx3 ∧ dx1
S
S
Z
+ f3 (x) dx1 ∧ dx2 =
ω.
S
Com a convenção acima, diremos que uma 2-forma diferencial ω está
associada ao campo de vetores f : Ω → R3 , se
ω = f1 (x) dx2 ∧ dx3 + f2 (x) dx3 ∧ dx1 + f3 (x) dx1 ∧ dx2 .
No caso n = 3, temos ainda o espaço A3 (R3 ) que tem dimensão 1,
de modo que se fixarmos como base a forma alternada
u1
(dx1 ∧ dx2 ∧ dx3 )(u, v, w) = v1
w1
u2
v2
w2
u3
v3 ,
w3
podemos considerar produto
a1
L1 ∧ L2 ∧ L3 = a 2
a3
b1
b2
b3
c1
c2 dx1 ∧ dx2 ∧ dx3 ,
c3
o qual nos permite definir:
Definição: Dado Ω aberto de R3 e a : Ω → R função contı́nua, a
aplicação
ω : Ω → A3 (R3 ),
ω(x) = a(x) dx1 ∧ dx2 ∧ dx3
é denominada 3-forma diferencial em Ω.
304
Cálculo Avançado I
Fazendo a identificação Rn ∼ L(Rn , R) ∼ A1 (Rn ) e convencionando que as funções escalares definidas e contı́nuas em Ω são formas
diferenciais de ordem 0, podemos resumir o que dissemos acima:
ı) para n = 2, temos três tipos de formas diferenciais: 0-forma,
1-forma e 2-forma;
ıı) para n = 3, temos quatro tipos de formas diferenciais: 0-forma,
1-forma, 2-forma e 3-forma;
ııı) em cada um desses casos, define-se uma operação de produto cujo
resultado é uma forma diferencial de grau igual à soma dos graus
do fatores envolvidos.
Para concluir as propriedades básicas, vamos introduzir o operador
diferencial d para formas diferenciais no caso particular n = 3.
Definição: Seja Ω ⊂ R3 um aberto e ω : Ω → Ak (R3 ) uma k-forma
diferencial (k = 0, 1, 2, 3). Dizemos que ω é de classe C 1 se seus
coeficientes ai são funções de classe C 1 . Neste caso, definimos dω
por:
(1) se ω é uma 0-forma, então ω(x) = a(x) e dω é a 1-forma
dω =
∂a
∂a
∂a
dx1 +
dx2 +
dx3 ;
∂x1
∂x2
∂x3
(2) se ω é a 1-forma a1 dx1 + a2 dx2 + a3 dx3 , então dω é a 2-forma
dω = (da1 ) ∧ dx1 + (da2 ) ∧ dx2 + (da3 ) ∧ dx3 ;
(3) se ω é a 2-forma a1 dx2 ∧ dx3 + a2 dx3 ∧ dx1 + a3 dx1 ∧ dx2 , então
dω é a 3-forma
dω = (da1 ) ∧ dx2 ∧ dx3 + (da2 ) ∧ dx3 ∧ dx1 + (da3 ) ∧ dx1 ∧ dx2 ;
Observe que se os coeficientes ai são funções de classe C 2 , ddω = 0
qualquer que seja a k-forma acima (verifique).
Observação: Consideremos a 1-forma diferencial em R2 :
ω = a1 dx1 + a2 dx2 .
Gauss, Green e Stokes
Então é fácil ver que
dω =
305
∂a2
∂a1
−
∂x1 ∂x2
dx1 ∧ dx2 ,
o que nos remete ao Teorema de Green: se Ω é um aberto cuja fronteira é uma curva de Jordan de classe C 1 com orientação positiva e
ω é uma 1-forma de classe de classe C1 em Ω, então,
Z
Z
ω=
dω.
(13.75)
∂Ω
Ω
Podemos também expressar o Teorema de Gauss com a mesma fórmula (13.75). De fato, considere a 2-forma diferencial ω asociciada
ao campo f = (a1 , a2 , a3 ), isto é,
ω = a1 dx2 ∧ dx3 + a2 dx3 ∧ dx1 + a3 dx1 ∧ dx2 .
(13.76)
Então (verifique),
∂a1
∂a2
∂a3
+
+
dx1 ∧ dx2 ∧ dx3 .
dω =
∂x1
∂x2
∂x3
Logo, se Ω é um aberto limitado de classe C 1 de R3 , temos o Teorema
de Gauss:
Z
Z
ω=
dω.
(13.77)
∂Ω
Ω
Analogamente, se ω = a1 dx1 + a2 dx2 + a3 dx3 é uma 1-forma de
classe C 1 , obtemos (verifique)
dω = A1 dx2 ∧ dx3 + A2 dx3 ∧ dx1 + A3 dx1 ∧ dx2 ,
com (A1 , A2 , A3 ) = rot(a1 , a2 , a3 ). Assim, com essa notação, se S é
uma superfı́cie orientável com bordo ∂S, podemos escrever o Teorema
de Stokes na forma
Z
Z
ω=
dω.
∂S
S
Como dissemos no inı́cio desta Seção, não é nosso interesse o estudo
mais aprofundado das formas diferenciais; o que aqui apresentamos
é uma mera introdução sobre esse tema. O leitor interessado poderá
consultar textos mais completos ou mais profundos (veja p.e., [2], [13]
e [14]).
306
Cálculo Avançado I
O Lema de Hadamard
A Mecânica do Contı́nuo é a área da Matemática que procura descrever os movimentos e, principalmente, deformações dos corpos fı́sicos associando-os a “meios contı́nuos”, isto é, desconsiderando-se suas
estruturas moleculares ou atômicas. Dessa forma, um corpo fı́sico fica
substituı́do pela região do espaço que ocupa e suas caracterı́sticas
fı́sicas (sólidos elásticos, visco elásticos, fluı́dos, etc.) passam a ser
caracterizadas por leis matemáticas (denominadas leis constitutivas)
que descrevem o comportamento macroscópico das deformações dessas regiões quando sujeitas a atuação de forças, tensões, etc.
Nessa teoria, um dos aspectos importantes refere-se ao estudo da
propagação de descontinuidades, tópico inicialmente estudado por
Riemann no final do século XIX.
Um dos reultados importantes desse estudo, muito citado nos textos
de Mecânica do Contı́nuo, é o Lema de Hadamard, que estabelece
condições para validar cálculos nas regiões de descontinuidade. Nesse
estudo, supõe-se que a descontinuidade de uma determinada grandeza
fı́sica descrita por uma função Φ : R3 → R se localiza numa superfı́cie
(de nı́vel)
S = (x1 , x2 , x3 ) ∈ R3 ; f (x1 , x2 , x3 ) = 0}.
No que segue, apresentamos (em Rn ) os resultados e argumentos
originais de Hadamard em [7].
Seja f : Rn → R função de classe C 1 e S a superfı́cie de nı́vel zero
de f , isto é,
S = x ∈ Rn ; f (x) = 0 .
Vamos supor que S divide o espaço Rn em duas regiões conexas Rn+
e Rn− , onde
Rn+ = x ∈ Rn ; f (x) > 0 , Rn− = x ∈ Rn ; f (x) < 0 .
Consideremos uma função contı́nua Φ : Rn+ ∪ Rn− → R satisfazendo
as seguintes condições: para todo x0 ∈ S, existem os limites
lim Φ(x),
x∈Rn
+
x→x0
lim Φ(x).
x∈Rn
−
x→x0
Gauss, Green e Stokes
307
Neste caso, podemos definir Φ+ , Φ− : S → R tais que, para todo
x0 ∈ S,
Φ+ (x0 ) = limn Φ(x),
x∈R
+
x→x0
Φ− (x0 ) = limn Φ(x).
x∈R
−
x→x0
(13.78)
Observção: Nas condições acima vamos denominar Φ+ e Φ− os
traços à direita e à esquerda de Φ sobre S, respectivamente.
Vamos considerar em S a métrica induzida pela norma euclidiana
de Rn , isto é, dados dois pontos x0 , y0 ∈ S, definimos d(x0 , y0 ) =
kx0 − y0 k.
Lema 13.41: As funções Φ+ e Φ− são contı́nuas em S
Prova: Faremos a prova no caso Φ+ ; o mesmo argumento se aplica
a Φ− . Seja ε > 0 e x0 ∈ S. Então, por (13.78), existe δ1 > 0 tal que
se x ∈ Rn+ e kx − x0 k < δ1 , tem-se |Φ(x) − Φ+ (x0 )| < ε.
Seja y0 ∈ S tal que d(y0 , x0 ) < δ1 . Então, existe δ2 > 0 tal que se
x ∈ Rn+ e kx − y0 k < δ2 , tem-se |Φ(x) − Φ+ (y0 )| < ε.
/ ∅, de modo que se x ∈ Bδ1 (x0 ) ∩
É claro que Bδ1 (x0 ) ∩ Bδ2 (y0 ) ∈
Bδ2 (y0 ), então
|Φ+ (x0 ) − Φ+ (y0 )| ≤ |Φ+ (x0 ) − Φ(x)| + |Φ(x) − Φ+ (y0 )| < 2ε
e a prova está completa.
Observação: Além das hipóteses acima, se supusermos que as derivad̄as parciais de Φ são contı́nuas em Rn+ e Rn− e possuem traços à
esquerda e à direita em todo ponto de S, podemos considerar, então,
−
as funções Ψ+
i , Ψi : S → R, i = 1, 2, . . . , n, assim definidas:
Ψ+
i (x0 ) = lim
n
x∈R
+
x→x0
∂Φ
(x),
∂xi
Ψ−
i (x0 ) = lim
n
x∈R
−
x→x0
∂Φ
(x).
∂xi
(13.79)
Neste caso, com os mesmo argumentos da prova do Lema 13.41,
−
podemos concluir que as funções Ψ+
i e Ψi são contı́nuas em S.
308
Cálculo Avançado I
Definição: Se Φ hé função
de classe C 1 em Rn+ ∪ Rn− , definimos as
i
∂Φ
funções salto [Φ], ∂x
: S → R por
i
[Φ](x0 ) = Φ+ (x0 ) − Φ− (x0 ),
∂Φ
−
(x0 ) = Ψ+
i (x0 ) − Ψi (x0 ),
∂xi
n X
∂Φ
[∇Φ] (x0 ) =
(x0 )e i .
∂xi
i=1
Podemos então demonstrar o Lema de Hadamard:
Lema 13.42: Seja Φ : Rn+ ∪Rn− → R função de classe C 2 satisfazendo
as condições (13.78) e (13.79). Seja γ : [a, b] → S uma curva diferenciável em ]a, b[. Então, as funções s 7→ Φ± γ(s) são diferenciáveis
em ]a, b[ e
n
X
′
dΦ±
Ψ±
(γ(s)) =
i γ(s) γi (s).
ds
i=1
Em particular, a aplicação s 7→ [Φ](γ(s)) é diferenciável em ]a, b[ e
dγ
d[Φ]
(γ(s)) = [∇Φ] γ(s) :
(s) .
(13.80)
ds
ds
Prova: Seja s0 ∈ ]a, b[ e x0 = γ(s0 ). Considere u 0 o vetor uniário
na direção de ∇f (x0 ). Então, existe δ0 > tal que, para todo ν > 0
e para todo s ∈ [s0 − δ0 , s0 + δ0 ], tem-se γν (s) = γ(s) + νu 0 ∈ Rn+ .
Além disso, é claro que a curva γν (s) é diferenciável no intervalo
(s0 − δ0 , s0 + δ0 ) e γν′ (s) = γ ′ (s).
Sejam gν e g0 as funções definidas no intervalo [s0 − δ0 , s0 + δ0 ] por
gν (s) = Φ γν (s) e g0 (s) = Φ+ γ(s) .
Segue da hipótese (13.78) que se |s − s0 | ≤ δ0 , gν (s) converge pontualmente para g0 (s). Provemos que essa convergência é uniforme.
Pelo Teorema do Valor Médio, temos
gν (s) − g0 (s) = Φ γ(s) + νu 0 − Φ+ γ(s)
= ∇Φ γ(s) + ξs νu 0 : (νu 0 ) ,
Gauss, Green e Stokes
309
onde 0 < ξs < 1. Assim, da desigualdade de Cauchy-Schwarz obtemos
|gν (s) − g0 (s)| ≤ νk∇Φ γ(s) + ξs νu 0 k.
(13.81)
Sendo Φ uniformemente contı́nua no conjunto
x = γ(s) + νu 0 ; |s − s0 | ≤ δ0 , 0 ≤ ν ≤ 1 ,
segue de (13.81) que existe M > 0 tal que
sup
|s−s0 |≤δ0
|gν (s) − g0 (s)| ≤ M ν
de onde se conclui que gν converge unifomemente para g0 no intervalo
[s0 − δ0 , s0 + δ0 ].
É claro que gν é diferenciável no intervalo (s0 − δ0 , s0 + δ0 ), com
gν′ (s) = ∇Φ γν (s) : γ ′ (s)
e é claro também que
lim
ν→0
gν′ (s)
=
n
X
i=1
′
γ(s)
γi (s)
Ψ+
i
(13.82)
pontualmente no intervalo (s0 − δ0 , s0 + δ0 ). Sendo Φ de classe C 2
em Rn+ , os mesmos argumentos anteriores se aplicam para provar que
a convergência em (13.82) é uniforme. Portanto, pelo Teorema 10.9
temos que g0 é diferenciável no intervalo (s0 − δ0 , s0 + δ0 ) e
g0′ (s) =
n
X
i=1
′
Ψ+
i γ(s) γi (s).
Repetindo os argmentos com γν (s) = γ(s) − νu 0 , temos os mesmos
−
−
resultados anteriores, com Φ+ e Ψ+
i substituidos por Φ e Ψi , com
o que concluı́mos a prova.
Observação: Como consequência do Lema 13.42, podemos considerar a 1-forma diferencial
n X
∂Φ
d[Φ] =
dxi
∂xi
i=1
310
Cálculo Avançado I
que está intrinsicamente definida sobre a superfı́cie S. Assim, se γ é
uma curva diferenciável em S, temos
Z
d[Φ] =
γ
Z
b
a
[∇Φ] γ(s) : γ ′ (s) ds.
Corolário 13.43: Seja Φ : Rn → R função contı́nua com derivadas
parciais de classe C 2 em Rn+ ∪ Rn− , satifazendo as condições (13.79).
Seja x0 ∈ S tal que ∇f (x0 ) 6= 0. Então existe λ(x0 ) ∈ R tal que
[∇Φ] (x0 ) = λ(x0 )∇f (x0 ).
Em particular, se n 0 é o vetor unitário normal a S em x0 , temos
h[∇Φ] (x0 ) : n 0 i = λ(x0 )k∇f (x0 )k.
(13.83)
Prova: Se Φ é contı́nua, então [Φ] γ(t) = 0 para todo t, qualquer
que seja a curva contida em S. Logo, de (13.80), temos
dγ
[∇Φ] γ(s) :
(s)
ds
= 0.
Portanto, para todo x ∈ S, os vetores [∇Φ] (x) e ∇f (x) são linearmente dependentes.
Observação: A Figura abaixo ilustra o gráfico de uma função Φ em
que as hipóteses do Lema de Hadamard não se verificam.
Φ
x2
x1
Gauss, Green e Stokes
311
De fato, temos
Φ(x) =
1 − kxk2 ,
0,
se kxk2 < 1 e x2 < 0,
senão.
Neste caso, consideremos S = {(x1 , 0) ; x1 ∈ R},
R2− = x ; x2 < 0
e
R2+ = x ; x2 > 0 .
Para x ∈ R2− tal que kxk2 < 1, temos
xi
∂Φ
(x) = −
,
∂xi
kxk2
i = 1, 2.
Assim, passando ao limite x → (0, 0) nos caminhos x2 = mx1 e
x2 = −mx1 , (m > 0), obtemos valores que dependem de m para cada
uma das derivadas acima. Portanto, o limite não existe e as hipóteses
do Lema 13.43 não são satisfeitas. De fato, para x = (x1 , 0) ∈ S,
temos [Φ](x1 , 0) = 1 − |x| se |x| ≤ 1 e [Φ](x1 , 0) = 0 se |x| ≥ 1, que
não é derivável em x = 0.
O exemplo acima pode ser facilmente estendido para Rn . De fato,
seja
1 − kxk2 , se kxk2 < 1 e xn < 0,
Φ(x) =
0,
senão
e S = x ; xn = 0 . É fácil ver que as hipóteses do Lema 13.42 não
se veriricam em x = 0. Neste caso, se x = (x′ , xn ), tem-se
q
[Φ](x ) = 1 − x21 + · · · + x2n−1
′
e se por exemplo, γ(s) = (s, 0, . . . , 0), temos [Φ](γ(s)) = 1 − |s|, que
não possui derivada em s = 0.
312
Cálculo Avançado I
Exercı́cios
Exercı́cio 13.1. Demonstre a fórmula (13.8) no caso n = 3.
Exercı́cio 13.2. Mostre que todo aberto limitado de classe C 1 é
J-mensurável.
Exercı́cio 13.3. Usando projeções estereográficas, construa um sistema completo de cartas locais contendo exatamente dois megulhos
para a esfera unitária de Rn :
Sn−1 = x ∈ Rn ; kxk2 = 1 .
Mostre que Sn−1 é uma superfı́cie orientável.
Exercı́cio 13.4. Considere a faixa de Möbius S definida pela parametrização F : (0, 1) × [0, 2π] → R3 ,
θ
x1 = F1 (r, θ) = cos(θ) 2 + r cos
2
θ
x2 = F2 (r, θ) = sen(θ) 2 + r cos
2
θ
z = F1 (r, θ) = r sen
2
Deduza a parametrização F considerando as seguintes tr̂es etapas:
para cada θ ∈ [0, 2π],
a) faça uma rotação de ângulo θ/2 do conjunto {(r, 0, 0), r ∈ [−1, 1]}
em torno da reta gerada por (0, 1, 0);
b) faça uma translação do resultado de (a) com o letravetor (2, 0, 0);
c) faça uma rotação de ângulo θ em torno da reta gerada por (0, 0, 1)
do resultado de (b).
Então:
1) verifique que F não é um mergulho;
2) determine um sistema completo de cartas locais para S contendo
dois mergulhos;
3) mostre que S não é orientável.
Gauss, Green e Stokes
313
Exercı́cio 13.5. Seja Ω ⊂ R2 aberto limitado de classe C 1 e γ nas
condições do Teorema de Green 13.20. Mostre que
Z
1 2π c(Ω) =
γ1 (t)γ2′ (t) − γ2 (t)γ1′ (t) dt
2 0
(13.84)
Z 2π
γ1 (t)γ2′ (t) dt
=
0
Exercı́cio 13.6. Seja Ω ⊂ R2 um aberto de Jordan cuja fronteira
∂Ω é uma poligonal fechada com vértices nos pontos P1 , P2 , . . . , Pm ,
onde Pi = (ai , bi ). Mostre que
1
a 1 b1
a 2 b2
a m bm
área(Ω) =
+
+···+
.
a 2 b2
a 3 b3
a 1 b1
2
Exercı́cio 13.7. Seja Ω ⊂ R2 um conjunto aberto limitado e convexo.
Um segmento rı́gido AB de comprimento 0 < L < diam(Ω) se desloca
mantendo suas extremidades A e B sobre a fronteira ∂Ω. Após uma
volta completa, um ponto M do segmento descreve uma curva fechada
Γ no interior de Ω. Mostre a área da região compreendida entre
as curvas ∂Ω e Γ é igual a πab, onde a e b são respectivamente os
comprimentos de AM e M B.
Sugestão: Use (13.84).
Exercı́cio 13.8. Considere Ω = (x1 , x2 ) ; x21 + x22 < 1 o disco
unitário de R2 e f : Ω −→ R2 , f = (f1 , f2 ) tais que f ′ é contı́nua em
Ω e é de classe C 2 em Ω.
a) Com a parametrização de ∂Ω dada por γ(θ) = (cos θ, sen θ),
mostre que:
Z
I ′ 1
∂f2
∂f1
det f (x) dx =
f1
− f2
ds
2 ∂Ω
∂θ
∂θ
Ω
onde ds denota o elemento comprimento de arco.
b) Se f (x) = M x sobre ∂Ω (onde M é uma matriz 2 × 2 constante),
use o item (a) para mostrar que:
Z
det f ′ (x) dx = π det(M ).
Ω
314
Cálculo Avançado I
c) Estenda os resultados dos itens (a) e (b) para Ω ⊂ R2 aberto
limitado cuja fronteira é uma curva de Jordan de classe C 1 e
conclua que, neste caso,
Z
det f ′ (x) dx = det(M )área(Ω).
Ω
Exercı́cio 13.9. Seja Ω ⊂ Rn um aberto de fronteira regualar S.
Dados f : Ω → R e g : S → R funções contı́nuas, considere o problema
de Neumann que consiste em determinar u: Ω → R de classe C 2 em
Ω tal que
−∆u = f em Ω,
(13.85)
∂u = g em S,
∂n
onde n é o letravetor normal unitário definido sobre Ω e exterior a
Ω.
Use o Teorema de Gauss para mostrar que nem sempre (13.85) possui
solução.
Exercı́cio 13.10. Considere os números reais 0 < a < b e Ω ⊂ R3 o
aberto definido por
Ω = x ∈ R3 ; a < kxk2 < b .
Seja f : Ω → R3 o campo de letravetores definido por
f (x) =
x
.
kxk32
Verifique que f é um campo solenoidal, irrotacional, mas não é um
campo rotacional em Ω.
A
Determinantes, traços e etc.
Tivemos oportunidade de considerar em capı́tulos anteriores o determinante e o traço de uma matriz. Por exemplo, no Capı́tulo 5,
provamos que a função A 7→ det(A), definida no espaço das matrizes
Mn×n (R), é Fréchet-diferenciável. Vimos também no Capı́tulo 12
como o determinante (Jacobiano) é “determinante” na fórmula de
mudança de variáveis. Em todas essas oportunidades usamos propriedades conhecidas, tais como det(AB) = det(A) det(B), etc. Para
tornar este texto auto-suficiente, vamos aqui fazer uma rápida introdução sobre estes objetos e demonstrar suas principais propriedades.
Formas n-lineares alternadas
Para inı́cio de conversa, precisamos relembrar alguns fatos básicos
sobre permutações.
Definição A.1: Toda aplicação bijetora
σ : {1, 2, . . . , n} → {1, 2, . . . , n}
é denominada permutação. Denominamos transposição toda permutação τ que satisfaça a seguinte propriedade: se 1 ≤ i, j ≤ n,
i 6= j, então
τ (i) = j, τ (j) = i, τ (k) = k, ∀k 6= i, j.
316
Cálculo Avançado I
Observação A.2: É claro que (verifique) se σ é uma permutação,
existem τ1 , . . . , τk transposições tais que σ = τ1 ◦ τ2 ◦ · · · ◦ τk . Além
disso, se σ = τe1 ◦ τe2 ◦ · · · ◦ τel , então k + l é número par, de modo que
se k é par (resp. ı́mpar), o mesmo ocorre com l. Dito isto, podemos
definir o sinal de σ:
1
se k é par,
sign σ =
−1 se k é ı́mpar.
Denotamos Πn o conjunto de todas as permutações de {1, . . . , n}.
É claro que Πn contém a identidade e, para cada σ ∈ Πn , existe
σ −1 ∈ Πn . Portanto, Πn é um grupo relativamente à composição de
funções.
Definição A.3: Seja V um espaço vetorial de dimensão n. Uma
aplicação Q : V n → R é uma forma n-linear se Q(v1 , v2 , . . . , vn ) é
linear em cada uma das suas componentes, isto é, para todo j =
1, . . . , n e a ∈ R,
Q(v1 , . . . , vj−1 , avj + ṽj , vj+1 . . . , vn )
= aQ(v1 , . . . , vj−1 , vj , vj+1 . . . , vn )
+ Q(v1 , . . . , vj−1 , ṽj , vj+1 . . . , vn ).
Uma forma n-linear é não nula se existe v = (v1 , . . . , vn ) ∈ V n tal
que Q(v ) 6= 0.
Notação: Se v ∈ V n e σ é uma permutação, denotaremos
Q(σv ) = Q(vσ(1) , vσ(2) , . . . , vσ(n) ).
Definição A.4: Uma forma n-linear é dita alternada se
Q(τ v ) = −Q(v ), ∀v ∈ V n , ∀τ transposição.
Observação A.5: É claro que se Q é uma forma n-linear alternada
e v = (v1 , . . . , vn ), com vi = vj para algum i 6= j, então Q(v ) =
0. Em particular, se v = (v1 , . . . , vn ) e {v1 , . . . , vn } é linearmente
dependente, então Q(v ) = 0 (verifique). É claro também que se σ é
uma permutação, então
Q(σv ) = (sign σ)Q(v).
Apêndice
317
Proposição A.6: Seja Q uma forma n-linear alternada não nula e
u = (u1 , . . . , un ). Então Q(u) = 0 se, e somente se, {u1 , . . . , un } é
linearmente dependente.
Prova: Em vista da Observação A.5, basta mostrar que a condição é
necessária. Suponhamos por absurdo Q não nula e {u1 , . . . , un } conjunto linearmente independente tais que Q(u1 , . . . , un ) = 0. Então a
aplicação linear λ 7→ Q(u1 , . . . , un−1 , λun ) é identicamente nula, isto
é,
Q(u1 , . . . , un−1 , v) = 0, ∀ v ∈ V.
Analogamente, a aplicação linear λ 7→ Q(u1 , . . . , un−2 , λun−1 , v) é
identicamente nula, qualquer que seja v ∈ V . Repetindo este argumento, concluı́mo que Q é identicamente nula, o que caracteriza o
absurdo.
e duas formas n-lineares alternadas, Q
Teorema A.7: Sejam Q e Q
e = λQ.
não nula. Então existe λ ∈ R tal que Q
Prova: Seja {u1 , . . . , un } uma base de V , u = (u1 , . . . , un ) e
λ=
e
Q(u)
.
Q(u)
e é identicamente nula. Se λ 6= 0, então a aplicação
Se λ = 0, então Q
e ) − λQ(v )
v 7→ Q(v
é uma forma n-linear alternada que se anula em u .
e − λQ é identicamente nula.
Proposição A.6, Q
Logo, pela
Observação: O conjunto F das formas n-lineares munido das operações usuais de soma e produto por escalar é um espaço vetorial. O
Teorema A.7 nos diz que o subespaço Fa das formas alternadas tem
dimensão 1.
O determinante
Notação: Ainda para simplificar a notação, se v = (v1 , . . . , vn ) ∈ V n
e L ∈ L(V, V ), escreveremos
Lv = (Lv1 , . . . , Lvn ).
318
Cálculo Avançado I
Definição A.8: Seja L ∈ L(V, V ) e Q uma forma n-linear não nula.
Definimos LQ : V n → R por
LQ (v ) = Q(Lv ).
É claro que se Q é alternada, LQ também é, de modo que, pelo
Teorema A.7, existe λ ∈ R tal que LQ (v ) = λQ(v ), ∀v ∈ V n . Como
veremos pelo resultado a seguir, este λ só depende de L.
Teorema A.9: Seja L ∈ L(V, V ) uma transformação linear. Então
existe λL ∈ R tal que LQ (v ) = λL Q(v ) para todo v ∈ V n e para
toda forma n-linear alternada Q.
e existem constantes reais λ,
Prova: Pelo Teorema A.7, dadas Q e Q,
e
λ e µ tais que
LQ = λQ,
Então , se v ∈ V n , temos
Logo
ee
LQ
e = λQ,
e = µQ.
Q
e
LQ
e(v ) = Q(Lv ) = µQ(Lv ) = µLQ (v ).
eQ(v
e ) = µλQ(v ).
λ
(A.1)
e = λ.
e = µQ, concluı́mos de (A.1) que λ
Como Q
Definição A.10: Dada a transformação L ∈ L(V, V ), a constante
λL é denominada determinante de L, que, de agora em diante, será
denotada por det(L). Assim, temos
LQ (v ) = det(L)Q(v ), ∀v ∈ V n , ∀Q forma n-linear alternada.
Observação: Seja L : V → V uma transformação linear e [L] a
matriz de L relativa à base {u1 , . . . , un }. Então, se vi = Lui , i =
1, 2, . . . , n, existem constantes ai1 , . . . , ain tais que
vi =
n
X
j=1
aij uj ,
Apêndice
319
de modo que
· · · a1n
..
..
.
.
· · · ann
a11
..
[L] =
.
an1
Se v = (v1 , . . . , vn ), obtemos
Q(v1 , u2 , . . . , un ) =
n
X
a1j Q(uj , u2 , . . . , un ).
j=1
Como Q(uj , u2 , . . . , un ) = 0 para todo j ≥ 2, temos
Q(v1 , u2 , . . . , un ) = a11 Q(u).
Observe agora que
Q(v1 , v2 , u3 , . . . , un ) =
n X
n
X
a1j a2k Q(uj , uk , u3 , . . . , un ).
j=1 k=1
Pela alternância de Q, temos
se j = 1, k = 2,
Q(u)
Q(uj , uk , u3 , . . . , un ) = −Q(u) se j = 2, k = 1,
0
senão,
de modo que
Q(v1 , v2 , u3 , . . . , un ) = (a11 a22 − a12 a21 )Q(u).
Observe que
a11 a22 − a12 a21 =
X
σ∈Π2
Repetindo o processo, obtemos
Q(v1 , . . . , vj , uj+1 , . . . , un ) =
X
σ∈Πj
sign σ a1σ(1) a2σ(2) .
sign σ a1σ(1) · · · ajσ(j) Q(u)
320
Cálculo Avançado I
e assim, sucessivamente, obtemos a expressão
Q(v ) =
X
σ∈Πn
sign σ a1σ(1) a2σ(2) · · · anσ(n)
!
Q(u),
Como, por definição, Q(v ) = det(L)Q(u), concluı́mos que
X
det(L) =
sign σ a1σ(1) a2σ(2) · · · anσ(n) .
(A.2)
σ∈Πn
É claro que os coeficientes da matriz [L] dependem da escolha da
base, mas o determinante independe dessa escolha. Mais precisamente, se A = [aij ] e B = [bij ] são representações matriciais da
transformação linear L relativamente a duas bases β1 e β2 , respectivamente, então
X
det(L) =
sign σ a1σ(1) · · · anσ(n)
σ∈Πn
=
X
σ∈Πn
sign σ b1σ(1) · · · bnσ(n) .
Se V está munido de um produto interno h : i, a transposta T T de
uma dada transformação linear T : V → V é definida pela relação de
dualidade:
hT u : vi = hu : T T vi, ∀u, v ∈ V.
(A.3)
O resultado a seguir nos fornece algumas propriedades básicas do
determinante de L.
Teorema A.11: A função det : L(V, V ) → R satisfaz as seguintes
propriedades:
a)
b)
c)
d)
det(αI) = αn ;
det(L ◦ M ) = det(L) det(M );
det(LT ) = det(L);
L é invertı́vel se, e somente se, det(L) 6= 0 e, neste caso,
det(L−1 ) =
1
.
det(L)
Apêndice
321
Prova: O item (a) segue direto da n-linearidade de Q. Para provar
(b), considere uma forma n-linear alternada não nula Q. Então, se
K = L ◦ M , temos
Q(Kv ) = det(K)Q(v ), ∀v ∈ V n .
Por outro lado,
Q(Kv ) = det(L)Q(M v ) = det(L) det(M )Q(v )
e a conclusão segue da unicidade do determinante.
Para provar (b), considere {u1 , . . . , un } uma base ortonormal de V .
Sejam
Lui = ai1 u1 + · · · + ain un
LT uj = aTj1 u1 + · · · + aTjn un
Então,
hLui : uj i = aij ,
hui : LT uj i = aTji
e segue de (A.3), aTji = aij . Portanto, de ,
X
det(LT ) =
sign σ aT1σ(1) · · · aTnσ(n)
σ∈Πn
=
X
σ∈Πn
=
X
σ∈Πn
sign σ aσ(1)1 · · · aσ(n)n
sign σ a1σ−1 (1) · · · anσ−1 (n)
= det(L)
Para mostrar o item (d), suponha L invertı́vel e considere M =
L−1 . Pelo item (b), se {v1 , . . . , vn } é uma base de V e Q é não
trivial, então para v = (v1 , . . . , vn ),
Q(v ) = det(L−1 ) det(L)Q(v ) 6= 0.
Reciprocamente, se det(L) =
6 0, considere {u1 , . . . , un } uma base
qualquer de V . Então, se Q é não nula,
Q(Lu) = det(L)Q(u) 6= 0,
322
Cálculo Avançado I
de modo que {Lu1 , . . . , Lun } é linearmente independente (veja Observação A.5). Logo, L é invertı́vel.
• O determinante da matriz em blocos
Consideremos uma matriz quadrada de ordem k + m da forma
[L] =
[L1 ] [L12 ]
[L21 ] [L2 ]
,
(A.4)
onde [L1 ] e [L2 ] são submatrizes quadradas de ordem k e m respectivamente e [L12 ], [L21 ] são blocos de ordem k × m e m × k respectivamente. Como veremos a seguir, se ao menos um dos blocos [L12 ]
ou [L21 ] for uma matriz nula, então
det[L] = det[L1 ] det[L2 ].
Para isso, consideremos {u1 , . . . , uk } e {v1 , . . . , vm } bases de Rk e
R respectivamente. Então, é imediato constatar que
m
β=
u1
0
,...,
uk
0
0
0
,
,...,
v1
vm
é uma base de Rk × Rm .
Dada uma forma (k + m)-linear alternada e não nula Q, podemos
escrever
u1
uk
0
0
Q
,...,
,
,...,
0
0
v1
vm
= Q1 (u1 , . . . , uk )Q2 (v1 , . . . , vm ),
onde Q1 (resp. Q2 ) é uma forma k-linear (resp. m-linear) alternada
e não nula. Observe que a decomposição acima não é única. De fato,
f1 = λQ1 e Q
f2 = λ−1 Q2 , λ 6= 0.
basta considerar Q
Considere a transformação linear L : Rk × Rm → Rk × Rm definida
por
u
L1 u
,
L
=
v
L2 v
Apêndice
323
onde L1 : Rk → Rk e L2 : Rm → Rm são lineares. Então, por
definição (veja A.10),
0
u1
uk
0
,...,
,...,
,
det(L)Q
vm
0
0
v1
L 1 u1
L 1 uk
0
0
=Q
,...,
,
,...,
0
0
L2 v1
L2 vm
= Q1 (L1 u1 , . . . , L1 uk )Q2 (L2 v1 , . . . , L2 vm )
= det(L1 )Q1 (u1 , . . . , uk ) det(L2 )Q2 (v1 , . . . , vm ),
e concluı́mos que det(L) = det(L1 ) det(L2 ).
Observe que a matriz de L relativamente à base canônica de Rk+m
tem a forma de blocos como em (A.4), com [L12 ] e [L21 ] matrizes
nulas.
Vamos agora considerar a transformação linear L : Rk × Rm →
Rk × Rm definida por
u
L1 u + L12 v
L
=
,
v
L2 v
onde L1 : Rk → Rk , L2 : Rm → Rm e L12 : Rm → Rk são lineares e
L1 é invertı́vel. Então, considerando a base β, temos
u1
uk
0
0
det(L)Q
,...,
,
,...,
0
0
v1
vm
L 1 u1
L 1 uk
L12 v1
L12 vm
=Q
,...,
,
,...,
0
0
L2 v1
L2 vm
L12 vi
0
= Q ···,
+
,···
0
L2 vi
L12 vi
0
= Q ···,
,··· + Q ···,
,···
0
L2 vi
(A.5)
Observe que {L1 u1 , . . . , L1 uk } é base de Rk e L12 vi ∈ Rk . Então,
Q
L1 v1
0
···,
L1 vk
0
,···,
L12 vi
0
, · · · = 0,
324
Cálculo Avançado I
de modo que (A.5) se reduz a
L 1 u1
L 1 uk
0
0
Q
,...,
,
,...,
.
0
0
L2 v1
L2 vm
Logo, como na etapa anterior, obtemos det(L) = det(L1 ) det(L2 ).
O traço
Nos capı́tulos anteriores, definimos o traço de uma matriz como
sendo a soma dos elementos da diagonal. Tal como fizemos para
o determinante, vamos agora definir o traço de uma transformação
linear L ∈ L(V, V ) que, como veremos, coincide com a definição dada
para matrizes e, de fato, independe da representação matricial de L.
Notação: Para simplificar a notação, se v = (v1 , . . . , vn ) ∈ V n e
L ∈ L(V, V ), escreveremos
Li v = (v1 , . . . , vi−1 , Lvi , vi+1 , . . . , vn ).
Para cada forma n-linear Q : V n → R, definimos
e Q (v ) =
L
n
X
Q(Li v ).
i=1
Observação: É fácil ver que se τ é uma transposição, então
Li τ (v ) = Lτ (i) (v ) = τ Li (v ) ,
e Q . Como conde modo que se Q é alternada, o mesmo vale para L
sequência dos Teoremas A.7 e A.9, podemos definir o traço de L:
Definição A.12: Dada a transformação L ∈ L(V, V ), o traço de L
é definido como a única constante tr(L) tal que
e Q (v ) = tr(L)Q(v ), ∀v ∈ V n , ∀Q forma n-linear alternada.
L
Mais precisamente,
tr(L)Q(v ) = Q(Lv1 , v2 , . . . , vn ) + Q(v1 , Lv2 , . . . , vn )
+ · · · + Q(v1 , v2 , . . . , Lvn ).
Apêndice
325
O resultado a seguir, cuja demonstração deixamos como exercı́cio
para o leitor, fornece algumas propriedades básicas do traço.
Teorema A.13: A função tr : L(V, V ) → R satisfaz as seguintes
propriedades:
a) tr(aL + M ) = a tr(L) + tr(M );
b) tr(I) = n;
c) tr(LT ) = tr(L);
d) tr(L ◦ M ) = tr(M ◦ L).
Observação: É fácil ver que se
· · · a1n
..
..
.
.
· · · ann
a11
.
[L] = ..
an1
é a matriz de L relativa à base {u1 , . . . , un }, então
tr(L) =
n
X
aii .
i=1
De fato, seja Q uma forma n-linear não nula. Então
tr(L)Q(u1 , . . . , un ) = Q(Lu1 , . . . , un ) + · · · + Q(u1 , . . . , Lun ).
Como
Luj =
n
X
aij ui
i=1
e
Q(u1 , . . . , Luj . . . , un ) = ajj Q(u1 , . . . , uj , . . . , un ),
segue que
tr(L)Q(u1 , . . . , un ) = a11 Q(u1 , . . . , un ) + · · · ann Q(u1 , . . . , un ).
Em particular, o traço da representação matricial de L ∈ L(V, V )
independe da escolha da base, isto é, se A, B ∈ Mn×n (R) são matrizes
equivalentes, então tr(A) = tr(B).
326
Cálculo Avançado I
O produto tensorial
Se V é um espaço vetorial munido de um produto interno h : i, o
produto tensorial ⊗ : V × V → L(V, V ) é definido por
(u ⊗ v)(h) = hv : hiu.
(A.6)
Se V é de dimensão finita, u ⊗ v pode ser expresso em termos de
coordenadas como matriz; se u = (x1 , . . . , xn ), v = (y1 , . . . , yn ) e
h = (z1 , . . . , zn ), temos
x1 y 1 x1 y 2 · · · x1 y n
z1
x2 y1 x2 y2 · · · x2 yn z2
.
(u ⊗ v)(h) =
..
..
.
···
···
···
zn
xn y 1 xn y 2 · · · xn y n
Teorema A.14: As funções det, tr : L(V, V ) → R satisfazem as
seguintes propriedades:
a) det(u ⊗ v) = 0;
b) tr(u ⊗ v) = hu : vi;
c) det I + (u ⊗ v) = 1 + hu : vi.
Prova: (a) Seja Q uma forma n-linear alternada não nula e h ∈ V n
tal que Q(h) 6= 0. Então, de (A.6),
det(u ⊗ v)Q(h) = Q (u ⊗ v)h
= Q hv : h1 iu, . . . , hv : hn iu
= hv : h1 i · · · hv : hn i Q(u, u, . . . , u) = 0.
(b) Por definição,
tr(L)Q(v ) =
n
X
i=1
Q(Li v ),
∀Q, ∀v ∈ V n .
No caso L = u ⊗ v, temos
Q(Li w ) = Q(w1 , . . . , wi−1 , (u ⊗ v)wi , wi+1 , . . . , wn )
= Q(w1 , . . . , wi−1 , hv : wi iu, wi+1 , . . . , wn )
= hv : wi iQ(w1 , . . . , wi−1 , u, wi+1 , . . . , wn )
(A.7)
Apêndice
327
Tomando {w1 , . . . , wn } uma base ortonormal com relação ao produto
interno h : i, temos
n
X
u=
hu : wj iwj .
j=1
Assim,
Q(Li w ) =
n
X
j=1
hv : wi ihu : wj iQ(w)
e obtemos de (A.7)
tr(L) =
n X
n
X
i=1 j=1
hv : wi ihu : wj i = hu : vi.
(c) Denotando L = (u ⊗ v), temos por definição,
det(I + L)Q(w ) = Q (I + L)w1 , . . . , (I + L)wn
n
X
= Q(w ) +
Q(Li w ) + · · · + Q(Lw )
i=1
= 1 + tr(L) Q(w ) + · · · + det(L)Q(w).
onde as parcelas resumidas por “· · ·” são aquelas que envolvem duas
ou mais “coordenadas” com termos Li w , isto é, parcelas do tipo
Q(w1 , . . . Lwi , . . . , Lwj , . . . , wn ). Estas parcelas, da mesma forma
como a última, que corresponde ao det(L), são nulas (verifique).
Logo,
det I + (u ⊗ v) = 1 + tr(u ⊗ v) = 1 + hu : vi.
Observação: Seja V um espaço de dimensão finita com produto
interno h : i e L ∈ L(V, V ) uma transformação linear. Associada a
L podemos definir a forma bilinear a : V 2 → R por a(u, v) = hLu :
vi. Reciprocamente, dada uma forma bilinear a(u, v) existe uma
transformação linear L tal que a(u, v) = hLu : vi. Em particular,
para L = u ⊗ v, temos
a(w, z) = (u ⊗ v)w : z = (hv : wi)u : z = hv : wihu : zi.
328
Cálculo Avançado I
Podemos então considerar equivalentemente o produto tensorial (A.6)
tendo como imagem o espaço das formas bilineares de V 2 em R, isto
é,
(u ⊗ v)(w, z) = hv : wihu : zi.
(A.8)
Partindo deste ponto de vista, podemos estender o produto tensorial
para ordens maiores: se u1 . . . , um ∈ V , o produto u1 ⊗ · · · ⊗ um é a
forma m-linear definida por
(u1 ⊗ · · · ⊗ um )(v1 , . . . , vm ) =
m
Y
i=1
hui : vi i.
O produto tensorial assim interpretado é conveniente no contexto das
formas diferenciais.
• O produto exterior
Se V um espaço vetorial e L ∈ L(V, V ), a decomposição
L=
1
1
(L + LT ) + (L − LT )
2
2
nos permite considerar a soma direta
L(V, V ) = Sim(V ) ⊕ Ant(V ),
sendo Sim(V ) e Ant(V ) respectivamente os espaços vetoriais das
transformações lineares simétricas e anti-simétricas.
Observe que se V = Rn , então Sim(Rn ) e Ant(Rn ) são isomorfos aos
espaços das matrizes simétricas e anti-simétricas, respectivamente.
Veja também que
dim Sim(Rn ) =
n(n + 1)
,
2
dim Ant(Rn ) =
n(n − 1)
.
2
Em particular, dim Ant(R2 ) = 1 e dim Ant(R3 ) = 3, de modo que
Ant(R3 ) é isomorfo a R3 .
Repare que em termos de coordenadas, Ant(R2 ) se identifica com
o subespaço das matrizes 2 × 2 gerado por
0 1
.
−1 0
Apêndice
Analogamente,
trizes
0 1
−1 0
0 0
329
Ant(R3 ) se identifica com o espaço gerado pelas ma
0
0,
0
0 1
0 0,
0 0
0
0
−1
0 0
0 0
0 −1
0
1.
0
(A.9)
Definição: Se V é um espaço vetorial com produto interno, definimos
o produto exterior em V por
∧ : V × V → Ant(V ),
u ∧ v = (u ⊗ v) − (v ⊗ u).
(A.10)
Observação: Observe que no caso particular V = R2 , a definição
do produto exterior expresso em termos de coordenadas nos dá
[e1 ∧ e2 ] =
0
−1
1
0
e, no caso n = 3, e1 ∧ e2 , e1 ∧ e3 e e2 ∧ e3 , correspondem às três
matrizes em (A.9).
Se considerarmos o produto tensorial como forma bilinear, o produto exterior (A.10) define uma forma bilinear alternada. Por exemplo, se u = a1 e1 + a2 e2 e v = b1 e1 + b2 e2 , temos
u ∧ v = (a1 e1 + a2 e2 ) ∧ (b1 e1 + b2 e2 ) = (a1 b2 − a2 b1 )(e1 ∧ e2 ),
que em termos de coordenadas se expressa
a
u∧v = 1
b1
a2
b2
0
−1
1
0
.
Assim, para w = w1 e1 + w2 e2 e z = z1 e1 + z2 e2
a
(u ∧ v)(w, z) = 1
b1
a2
b2
a1
b1
a2
b2
=
z1
w1
0
−1
z2
w2
1
0
w1
w2
z1
:
z2
330
Cálculo Avançado I
Analogamente, se u = a1 e1 + a2 e2 + a3 e3 e v = b1 e1 + b2 e2 + b3 e3 ,
temos
u ∧ v = (a1 b2 − a2 b1 )(e1 ∧ e2 ) + (a1 b3 − a3 b1 )(e1 ∧ e3 )
+ (a2 b3 − a3 b2 )(e2 ∧ e3 )
e, como no caso anterior, u ∧ v define uma forma bilinear alternada
de modo que podemos considerar
∧ : R3 × R3 → A2 (R3 ).
Vale observar neste caso que
u ∧ v = (a1 b2 − a2 b1 )(e1 ∧ e2 ) + (a1 b3 − a3 b1 )(e1 ∧ e3 )
+ (a2 b3 − a3 b2 )(e2 ∧ e3 )
= (a2 b3 − a3 b2 )(e2 ∧ e3 ) + (a3 b1 − a1 b3 )(e3 ∧ e1 )
+ (a1 b2 − a2 b1 )(e1 ∧ e2 ),
de modo que podemos fazer a associação (veja a Observação 13.40)
e2 ∧ e3 ∼ e1 ,
e3 ∧ e1 ∼ e2 ,
e1 ∧ e2 ∼ e3
para estabelecer que u ∧ v ∼ u × v.
Lembrando que V = L(Rn , R) é isomorfo a Rn e considerando as
observações acima, podemos estender o produto exterior para as formas lineares. De fato, se definimos dxi (h) = hi , então {dx1 , . . . , dxn }
é uma base de L(Rn , R). Associada a esta base consideramos a forma
bilinear
dxi ∧ dxj : V × V → A2 (Rn ),
dxi ∧ dxj (u, v) = u : (ei ∧ ej )v .
É claro que dxi ∧ dxi = 0, para todo i = 1, . . . , n. Além disso,
dxi ∧ dxj (u, u) = 0 para todo u ∈ Rn .
Como o espaço A2 (R2 ) tem dimensão 1, {dx1 ∧ dx2 } é uma base
deste espaço. Se n = 3, o espaço A2 (R3 ) tem dimensão 3, e pode-se
verificar que {dx1 ∧ dx2 , dx1 ∧ dx3 , dx2 ∧ dx2 } é base de A2 (R3 ).
Apêndice
331
Por exemplo, consideremos L1 , L2 ∈ L(R2 , R),
L1 = a1 dx1 + b1 dx2 ,
L2 = a2 dx1 + b2 dx2 .
O produto exterior de L1 e L2 é a forma bilinear alternada, definida
por
a b
L1 ∧ L2 = 1 1 dx1 ∧ dx2
a 2 b2
Se Li ∈ L(R3 , R), Li = ai dx1 + bi dx2 + ci dx3 , definimos o produto
exterior
L1 ∧ L2 =
a1
a2
+
a
b1
dx1 ∧ dx2 + 1
b2
a2
b1
b2
c1
dx1 ∧ dx3
c2
c1
dx2 ∧ dx3 .
c2
Por fim, sendo A3 (R3 ) um espaço vetorial de dimensão 1, definmos
a forma trilinear alternada dx1 ∧ dx2 ∧ dx3 : V × V × V → A3 (R3 )
por
u1 u2 u3
dx1 ∧ dx2 ∧ dx3 (u, v, w) = v1 v2 v3 .
w1 w2 w3
Ao leitor interessado em aprofundar os resultados e observações expostas nesse Apêndice, recomendamos consultar textos sobre Álgebra
Multiliner (veja por exemplo, Cap. 4 de [10]).
Referências
[1] Abdelhay, J.: Curso de Análise Matemática, Vol III, Editora
Cientı́fica, Rio de Janeiro-RJ, 1955.
[2] Acker, F.: Análise Vetorial Clássica, Textos Universitários, Soc.
Brasileira de Matemática, 2011.
[3] Apostol, A.M.: Análisis Matemático, Editorial Reverté S.A.,
1960.
[4] Buck, R.C.: Advanced Calculus, International Series in Pure and
Applied Mathematicas, McGraw-Hill, Second Edition, 1965.
[5] Chilov, G., Analyse Mathématique - Fonctions de Plusieurs Variables Réelles, Ed. Mir, Moscou, 1975.
[6] Dantas, M.J.H.: Convexidade e diferenciabilidade, Matemática
Universitária, no. 30, 2001, pp. 113–114.
[7] Hadamard, L., Leçons sur la Propagation des Ondes et les Équations de l’Hidrodynamique, Librairie Scientifique A. Hermann,
Paris, 1903.
[8] Kavian, O.: Introduction à la Théorie des Points Critiques,
Mathématiques & Applications no. 13, Spring-Verlag, 1993.
[9] Knuth, D.E.: The TEXbook , Addison Wesley Publ. Company,
1989.
[10] Lang. S.: Álgebra Linear, Editora Edgard Blücher LTDA, 1971,
[11] Lima, E.L.: Curso de Análise, Vol II, Projeto Euclides, IMPA,
1981.
[12] Liu, I-S.: Continuum Mechanics, Springer, 2002.
334
Cálculo Avançado I
[13] Medeiros, L.A.: Lições sobre a equação x′ = f (t, x), Monografias
XXXII, Centro Brasileiro de Pesquisas Fı́sicas, 1971.
[14] Rudin, W.: Principles of Mathematical Analysis, 3rd. edition
McGraw-Hill, 1976.
[15] Spivak, M.: Cálculo en Variedades, Editorial Reverté S.A., 1972.