Ezequiel C. Siqueira
Ezequiel C. Siqueira
UNIVERSIDADE ESTADUAL PAULISTA
Notas de Aula — FIS0999 - Termodinâmica e Fı́sica Estatı́stica
Notas de Aula — FIS0999
Termodinâmica e Fı́sica
Estatı́stica
Departamento de Fı́sica e Quı́mica
Faculdade de Engenharia de Ilha Solteira
2013
Sumário
1
Introdução aos Métodos Estatísticos
5
1.1
O problema da caminhada aleatória e a distribuição binomial . . . . . . . . . . . . . . . . . . . .
7
1.1.1
O problema da caminhada aleatória unidimensional . . . . . . . . . . . . . . . . . . . . .
9
Discussão geral de valores médios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
11
1.2.1
Cálculo dos valores médios para o problema da caminhada aleatória . . . . . . . . . . . .
15
1.3
Distribuição de probabilidades para N grande . . . . . . . . . . . . . . . . . . . . . . . . . . . .
20
1.4
Distribuições de probabilidade Gaussianas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
25
1.5
Discussão Geral do problema da caminhada aleatória . . . . . . . . . . . . . . . . . . . . . . . .
29
1.5.1
Distribuições de probabilidades envolvendo várias variáveis . . . . . . . . . . . . . . . .
30
1.5.2
Comentários sobre distribuições de probabilidade contínuas . . . . . . . . . . . . . . . .
32
1.5.3
Cálculo geral dos valores médios para a caminhada aleatória . . . . . . . . . . . . . . . .
38
1.2
2
Descrição Estatística de um Sistema de Partículas
47
2.1
Formulação Estatística do Problema Mecânico . . . . . . . . . . . . . . . . . . . . . . . . . . . .
48
2.1.1
Especificação dos Estados do Sistema . . . . . . . . . . . . . . . . . . . . . . . . . . . .
48
2.1.2
Ensemble Estatístico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
50
2.1.3
Postulados Básicos da Física Estatística . . . . . . . . . . . . . . . . . . . . . . . . . . .
51
2.1.4
Alcance do estado do equilíbrio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
52
2.1.5
Cálculos de Probabilidade . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
54
2.1.6
O comportamento da densidade de estados . . . . . . . . . . . . . . . . . . . . . . . . .
55
Interação entre Sistemas Macroscópicos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
60
2.2.1
Interação Térmica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
60
2.2.2
Interação Mecânica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
62
2.2.3
Interação Geral . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
63
2.2
1
SUMÁRIO
2
2.3
2.4
3
64
2.3.1
Trabalho quasi-estático realizado pela pressão . . . . . . . . . . . . . . . . . . . . . . . .
66
Diferenciais Exatas e Inexatas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
66
Termodinâmica Estatística
75
3.1
Irreversibilidade e a aproximação para o equilíbrio . . . . . . . . . . . . . . . . . . . . . . . . .
75
3.1.1
Condições de equilíbrio e restrições . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
75
3.1.2
Processos Reversíveis e Irreversíveis . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
77
Interação entre Sistemas Macroscópicos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
77
3.2.1
Interação térmica entre sistemas macroscópicos . . . . . . . . . . . . . . . . . . . . . . .
77
3.2.2
A aproximação do equilíbrio térmico . . . . . . . . . . . . . . . . . . . . . . . . . . . .
80
3.2.3
Temperatura . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
82
3.2.4
Reservatório de Calor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
84
3.2.5
Análise de largura da distribuição de probabilidades . . . . . . . . . . . . . . . . . . . .
86
Interação Geral entre Sistemas Macroscópicos . . . . . . . . . . . . . . . . . . . . . . . . . . . .
89
3.3.1
Dependência da densidade de estados com os parâmetros externos . . . . . . . . . . . . .
89
Equilíbrio entre Sistemas Interagentes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
91
3.4.1
Processos quasi-estáticos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
92
3.4.2
Condições de equilíbrio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
93
3.4.3
Propriedades da Entropia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
94
Cálculo Estatístico de Quantidades Termodinâmicas . . . . . . . . . . . . . . . . . . . . . . . . .
97
3.2
3.3
3.4
3.5
4
Processos Quasi-Estáticos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Termodinâmica e suas aplicações
99
4.1
Grandezas Extensivas e Intensivas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
99
4.2
Parâmetros Macroscópicos e suas medidas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
4.3
4.4
4.2.1
Trabalho e Energia Interna . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
4.2.2
Calor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
4.2.3
Temperatura Absoluta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
Calor Específico e Capacidade Térmica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
4.3.1
Entropia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105
4.3.2
Conseqüências da definição da entropia absoluta . . . . . . . . . . . . . . . . . . . . . . 106
Aplicações simples da Termodinâmica macroscópica à um gás ideal . . . . . . . . . . . . . . . . 108
4.4.1
Propriedades dos gases ideais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109
SUMÁRIO
4.5
3
Relações gerais para uma substância homogênea . . . . . . . . . . . . . . . . . . . . . . . . . . 115
4.5.1
Variáveis independentes S e V . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 116
4.5.2
Variáveis independentes S e p . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 116
4.5.3
Variáveis Independentes T e V . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 117
4.5.4
Variáveis Independentes T e p . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 119
4.5.5
Relações de Maxwell . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 120
4.6
Capacidades Térmicas (caso geral) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121
4.7
Manipulando Derivadas Parciais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123
4.7.1
Jacobianos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123
4.7.2
Aplicações de Jacobianos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 126
4.8
Entropia e Energia Interna . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 129
4.9
Expansão livre e o processo de Joule-Thomson . . . . . . . . . . . . . . . . . . . . . . . . . . . 131
4.9.1
Expansão livre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131
4.9.2
Processo de Joule-Thomson . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132
4.10 Máquinas Térmicas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 137
4.10.1 A máquina de Carnot . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 137
4.10.2 Entropia do ciclo de Carnot . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 140
4.10.3 Eficiência de uma máquina de Carnot . . . . . . . . . . . . . . . . . . . . . . . . . . . . 141
4.11 Refrigeradores . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 141
4.12 Eficiência de Máquinas Térmicas Reais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 143
4.13 Condições de Equilíbrio e Transições de Fase . . . . . . . . . . . . . . . . . . . . . . . . . . . . 150
4.13.1 Sistemas em contato com um reservatório à temperatura constante . . . . . . . . . . . . . 151
4.13.2 Sistema em contato térmico com um reservatório térmico a volume e pressão constantes . 153
4.13.3 Aplicação dos princípios de energia mínima: transições de fase . . . . . . . . . . . . . . . 154
4.13.4 Trocas de fase de uma substância simples . . . . . . . . . . . . . . . . . . . . . . . . . . 159
4.13.5 Cálculo aproximado da pressão de vapor . . . . . . . . . . . . . . . . . . . . . . . . . . 159
4.14 Transformações de fase e a equação de estado . . . . . . . . . . . . . . . . . . . . . . . . . . . . 161
4
SUMÁRIO
Capítulo 1
Introdução aos Métodos Estatísticos
A Física Estatística é uma disciplina da física onde são estudados sistemas constituídos por um número gigantesco de partículas. Por um número gigantesco, queremos dizer quantidades maiores ou da ordem do número
de Avogadro (6,02×1023 ). Desta forma, esta disciplina fornece métodos gerais que podem ser empregados em
todas as áreas da física e mesmo em outras áreas como Química, Biologia, Economia, etc. De fato, todos os
sistemas que apresentam dimensões observáveis com uso da luz no espectro do visível (sistemas e organismos de
nosso cotidiano) são constituídos por um número gigantesco de átomos e moléculas. Neste curso, consideraremos
sistemas como sólidos, líquidos, radiação eletromagnética, etc., e veremos que estes se comportam segundo leis
absolutamente gerais embora seus constituintes tenham caráter completamente distintos microscopicamente. De
fato, atualmente sabemos descrever boa parte dos sistemas do ponto de vista microscópico através da aplicação
dos métodos de Mecânica Quântica, no entanto, quando estamos considerando sistemas de muitas partículas, os
métodos ficam muito complicados de serem implementados. Isso se deve não apenas à questões técnicas como
limitações computacionais na soluções de equações mas também devido ao comportamento coletivo ser completamente diferente do comportamento individual das moléculas. Um exemplo simples são os organismos vivos
que embora sejam constituídos por átomos e moléculas, cujas interações e características sabemos descrever bem,
não é possível prever as suas capacidades de interagir com o ambiente e de se reproduzir. Estas são capacidades
oriundas de um comportamento coletivo de seus constituintes.
Aqui, faz-se necessário definir alguns termos que serão utilizados de maneira recorrente ao longo do curso.
Quando falamos em sistemas microscópicos nos referimos à sistemas com tamanho da ordem ou menor do que
0, 1 nm. Isso implica em sistemas do tamanho de átomos e moléculas. Sistemas macroscópicos, por outro lado,
são sistemas constituídos por um número muito grande de átomos e moléculas cujas dimensões são superiores a
micrometros. A escala intermediária entre o micro e o macro é chamada de escala mesoscópica e não estaremos
5
6
CAPÍTULO 1. INTRODUÇÃO AOS MÉTODOS ESTATÍSTICOS
interessados nesta escala de tamanho. Este é um regime intermediário onde tanto os efeitos macro e microscópicos
competem em pé de igualdade. Existe uma área ativa de pesquisa nesta escala de comprimento, mais complicada
de ser estudada. Os objetos macroscópicos podem ser descritos através de grandezas como volume, temperatura,
pressão, magnetização, etc., que são parâmetros gerais válidos para o sistema como um todo. Sendo assim, quando
dizemos que a pressão de vapor de um gás encerrado em uma câmara é 1M Pa, estamos dizendo que na média
a pressão em todos os pontos do gás mede este valor. Esta é uma afirmação válida somente quando o gás como
um todo está em um situação de equilíbrio, i.e, a pressão, volume, e demais parâmetros que caracterizam o gás
não variam no tempo. Em todo o curso, estaremos estudando sistemas em equilíbrio, i.e., sistemas cujas variáveis
macroscópicas estão fixas no tempo. Fora do equilíbrio nada podemos afirmar sobre o sistema.
A chamada Termodinâmica é a disciplina onde se estuda as relações entre as variáveis macroscópias que
caracterizam o sistema. Devido ao fato de se tratar de variáveis que descrevem sistemas de muitas partículas, suas
leis básicas (Lei Zero, 1a , 2a e 3a leis da termodinâmica) são completamente gerais e intuitivas. Isto também explica
o fato da termodinâmica ter suas origens no final do século XVIII e início do século XIX. É importante ressaltar
que estas leis são válidas quando os sistemas estão em equilíbrio. Embora a termodinâmica seja extremamente
importante mesmo nos dias de hoje, não é possível fazer progresso no entendimento detalhado dos sistemas sob
consideração devido à sua generalidade. De fato, a virtude de permitir formular leis completamente gerais também
é maior fraqueza desta disciplina pois não permite entender as diferenças observadas entre diversos sistemas. O
progresso científico nesta área se deu quando tentou-se formular os problemas de um ponto de vista microscópico.
O objetivo da Física Estatística é obter leis gerais que descrevem comportamentos de sistemas de muitas partículas
através de uma aproximação microscópica. Neste caso, e isso ficará claro futuramente, conseguimos obter todos
os resultados da termodinâmica mais resultados gerais baseados em aspectos microscópicos. No entanto, ainda
temos a limitação à sistemas em equilíbrio assim como no caso da termodinâmica. Sistemas fora do equilíbrio
são extremamente complicados não permitindo formular leis tão gerais como no caso do estado de equilíbrio.
Atualmente, muito trabalho tem sido desenvolvido em problemas de não-equilíbrio, porém, para entender estas
teorias precisamos aprender a formulação de equilíbrio.
Por fim, notamos que é possível descrever sistemas analisando as interações entre as partículas constituintes
em detalhes e então calcular as variáveis macroscópicas. Esta metodologia é aplicada na chamada teoria cinética
e é válida também para sistemas fora do equilíbrio. No entanto, é o método mais difícil de ser aplicado além de
não permitir a generalidade que é obtida na teoria de física estatística de equilíbrio que estaremos estudando.
1.1. O PROBLEMA DA CAMINHADA ALEATÓRIA E A DISTRIBUIÇÃO BINOMIAL
1.1
7
O problema da caminhada aleatória e a distribuição binomial
Na introdução, discutimos aspectos gerais da física estatística e sua aplicabilidade a sistemas de muitas partículas.
Isso de deve ao caráter estastístico da teoria que iremos considerar agora. O adjetivo “estatística" está relacionado
à aplicação de métodos de teoria de probabilidades na descrição dos sistemas físicos. De fato, como não temos
como calcular todas as quantidades físicas a partir de primeiros princípios, partimos para uma descrição coletiva
do sistema. Com isso, fica subentendido que não estamos preocupados com a descrição detalhada de cada partícula
no sistema.
Quando falamos em probabilidade, estamos considerando a chance de um determinado evento ocorrer quantificando essa chance através de um valor situado entre 0 e 1. Assim, quanto mais próximo de 1, maiores são as
chances do evento ocorrer. Este número só faz sentido quando consideramos um número muito grande de tentativas de maneira que a probabilidade é a fração de eventos que ocorrem dentro do número total de tentativas. Para
ficar mais claro, consideremos um exemplo simples de jogo de cara e coroa. Quando dizemos que a probabilidade
é de 50% de aparacer cara, estamos na verdade afirmando que após um número muito grande de lançamentos da
moeda, em metade dos lançamentos teremos cara como resultado final. Isto, é claro, considerando que a moeda
é “honesta" ou seja, que as condições em que a moeda foi lançada são iguais em todos os lançamentos. De maneira equivalente, podemos pensar em um número muito grande de moedas sendo lançadas ao mesmo tempo e
sob as mesmas condições. A teoria da probabilidade nos diz que neste caso, aproximadamente metade das moedas
apresentará cara e a outra metade coroa. O ponto essencial aqui, é o fato de que a descrição estatística só faz
sentido quando consideramos um número N muito grande de sistemas similarmente preparados. Este conjunto de
sistemas é chamado de ensemble estatístico. A probabilidade de ocorrência de um evento é definida com respeito
a este ensemble e então definida pela fração de sistemas no ensemble que são caracterizados pela ocorrência deste
evento particular.
A seguir, vamos desenvolver os conceitos básicos probabilidade em um problema específico cujos resultados
são bastante úteis e recorrentes em várias problemas físicos. Este problema, é chamado de problema da caminhada
aleatória ou do inglês the random-walk problem. Em sua forma mais simples, o problema é formulado da seguinte
forma:
Um homem bêbado se desloca a partir de um poste localizado em x = 0 (Veja Fig. 1.1). Cada passo dado pelo
homem, para direita ou esquerda, tem um comprimento igual a l e é independente do passo precedente. Tudo o
que pode ser dito é que existe uma probabilidade do passo ser dado para a direita é p e q = 1 − p é a probabilidade
para um passo à esquerda. No caso mais simples, q = p e as probabilidades são iguais, no entanto, no caso geral
temos p ̸= q. Isto pode ser realizado considerando que a rua tem uma inclinação de maneira que a probabilidade
CAPÍTULO 1. INTRODUÇÃO AOS MÉTODOS ESTATÍSTICOS
8
poste
Figura 1.1: O problema da caminhada aleatória em 1 dimensão.
de dar um passo para baixo é maior do que para cima.
Desde que cada passo tem um um comprimento fixo e igual a l, então a distância percorrida pelo homem tem
a forma geral x = ml onde m é um número inteiro positivo, negativo ou zero. A questão de interesse é então: após
N passos dado pelo homem, qual é a probabilidade dele estar a um distância x = ml em relação ao poste? Em
termos estatísticos, estamos considerando um ensemble com um número muito grande de homens que deslocam
a partir da origem e a probabilidade a ser determinada corresponde a fração de homens no ensemble que estão
localizados em x = ml após os N passos.
É claro que este problema pode ser generalizado para o caso de duas e três dimensões. Nestes casos, teremos
que adicionar vetores posição de mesmo módulo l e direções aleatórias e no final perguntar qual é a distância
percorrida após a adição de N vetores. Notamos também que a distância entre a extremidade do último vetor e
a origem não é mais um número inteiro, múltiplo de l, mas apresenta um valor qualquer. Porém, fica claro que a
idéia geral permanece a mesma: determinar a posição do homem após N passos considerando-se probabilidades
de se ter um passo em um determinado sentido e direção.
O principal objetivo de se estudar o problema da caminhada aleatória é o fato de que muitos sistemas físicos na
natureza exibem um comportamento similar. Um dos principais exemplos deste tipo são sistemas magnéticos com
spin 1/2. Nestes sistemas, os átomos magnéticos podem apresentar duas orientações (denominadas up e down)
em relação à uma dada direção (em geral determinada por um campo magnético externo). Neste caso, a questão
a ser respondida é qual o momento magnético total de um ensemble de N átomos se conhecemos a probabilidade
das orientações up e down. Outro exemplo muito importante é a difusão de uma molécula em um gás. A colisão
da molécula com as demais torna seu deslocamento aleatório e então o interesse é a determinação do caminho
percorrido pela molécula após sofrer N colisões. As colisões determinam as direções e sentidos dos vetores
a serem somados na caminhada aleatória em três dimensões. Na verdade o movimento difusivo, caracterizado
pelo movimento aleatório das partículas, está presente em vários sistemas físicos diferentes. O movimento dos
elétrons em um metal, por exemplo, é completamente difusivo de maneira similar à de moléculas em um gás.
Quando aplicamos um campo elétrico externo, forçamos os elétrons a se movimentarem em uma dada direção
em superposição ao movimento difusivo. Como resultado, temos uma resistência elétrica devida às colisões sendo
1.1. O PROBLEMA DA CAMINHADA ALEATÓRIA E A DISTRIBUIÇÃO BINOMIAL
9
medida pelo chamado tempo de relaxação, que é calculado através do modelo de caminhada aleatória. Você mesmo
pode experimentar o movimento difusivo quando tenta caminhar no meio de uma multidão em algum lugar lotado.
Neste caso, fica muito difícil caminhar em linha reta e no final, após N passos, a sua posição será determinada de
maneira probabilística, conforme discutido a seguir.
1.1.1
O problema da caminhada aleatória unidimensional
Vamos considerar o problema da caminhada aleatória no caso unidimensional em detalhes. Aqui será conveniente
usar uma nomenclatura mais técnica onde falamos de uma partícula fazendo N deslocamentos ou passos a partir
de uma dada origem. Após um total de N passos, cada um de comprimento l, a partícula estará localizada em
x = ml
(1.1)
−N ≤ m ≤ N.
(1.2)
onde m é um número inteiro dentro do intervalo
O objetivo é calcular a probabilidade PN (m) de encontrar a partícula na posição x = ml após N passos.
Vamos denotar o número de passos para a direita por n1 e n2 o número de passos para a esquerda. Estes valores
estão relacionados por
n1 + n2 = N.
(1.3)
O deslocamento líquido (medido para a direita em unidades do comprimento l) é dado por
m = n1 − n2 .
(1.4)
Combinando as Eqs. (1.3) e (1.4) podemos escrever ainda
m = n1 − n2 = n1 − (N − n1 ) = 2n1 − N
donde vemos que se N é ímpar, os possíveis valores de m também são ímpares. Reciprocamente, se N é par então
os valores de m também devem ser pares.
Aqui consideramos uma hipótese fundamental para que o problema da caminhada aleatória possa ser resolvido.
Consideramos que os passos dados pela partícula são estatisticamente independentes. Neste caso, cada passo é
caracterizado por sua respectiva probabilidade e a probabilidade para um conjunto de N passos pode ser facilmente
calculada através do produto de probabilidades individuais. Abaixo, fazemos as seguintes definições:
p = probabilidade de que o passo seja para a direita
q = 1 − p = probabilidade de que o passo seja para a esquerda.
10
CAPÍTULO 1. INTRODUÇÃO AOS MÉTODOS ESTATÍSTICOS
A probabilidade de uma seqüência de n1 passos para a direita e n2 passos para a esquerda é dado simplesmente
pelo produto das probabilidades de cada passo, i.e.,
p p · · · p q q · · · q = pn1 q n2 .
| {z } | {z }
(1.5)
n1 fatores n2 fatores
Agora, existem diferentes maneira possíveis de dar n1 passos para a direita e n2 passos para a esquerda de
modo que o número total de passos seja igual N . O número das diferentes possibilidades é dado por
N!
.
n1 !n2 !
(1.6)
A Eq. (1.6) é bem conhecida em problemas de análise combinatória. Para ilustrar este ponto, considere o
seguinte problema: temos N cadeiras e desejamos acomodar N pessoas. De que maneiras diferentes podemos
distribuir estas pessoas nas cadeiras? Para resolver isso, considere que existem N maneiras diferentes de colocar
uma pessoa na primeira cadeira. Após a primeira cadeira ser ocupada, sobram (N − 1) maneiras diferentes de
ocupar a segunda cadeira; em seguida, sobram N − 2 maneiras diferentes de ocupar a terceira cadeira e assim por
diante. No final, o número total de modos de ocupar as cadeiras é dado por:
N (N − 1)(N − 2)(N − 3)(N − 4)(N − 5) · · · 1 ≡ N !
Na equação acima consideramos que todas as pessoas são diferentes. Mas agora considere que dentre as N
pessoas, temos n1 mulheres e n2 homens. Se consideramos apenas o sexo como característica que diferenciam
estas pessoas, então as n1 ! permutações das mulheres entre elas próprias não levam a um modo diferente de
acomodar N pessoas. Similarmente, as n2 ! permutações dos homens levam ao mesmo resultado. Assim, o número
total de diferentes modos de acomodar N pessoas é dado por N !/n1 !n2 !. O mesmo raciocínio é usado para chegar
na Eq. (1.6) em relação ao número de passos para a direita e esquerda no caso da caminhada aleatória.
A probabilidade WN (n1 ) de tomar n1 passos para a direita e n2 passos para a esquerda, em um total de N
passos e em qualquer ordem, é obtida pelo produto da probabilidade dada pela Eq. (1.5) e os diferentes modos de
dar os passos (Eq. (1.6)). Assim, escrevemos:
N ! n1 n2
p q
n1 !n2 !
(1.7)
N!
pn1 q N −n1 .
n1 !(N − n1 )!
(1.8)
WN (n1 ) =
e desde que n1 + n2 = N , podemos escrever ainda
WN (n1 ) =
A Eq. (1.8) é chamada de distribuição binomial. A razão é que a Eq. (1.8) representa um termo típico
encontrado na expansão do binômio (p + q)N pelo teorema binomial. A expansão binomial é dada pela fórmula:
(p + q)N =
N
∑
N!
pn q N −n .
n!(N
−
n)!
n=0
(1.9)
1.2. DISCUSSÃO GERAL DE VALORES MÉDIOS
11
Já mostramos que se sabemos que a partícula efetuou n1 passos para a direita então podemos determinar o
seu deslocamento m uma vez que conhecemos o número total N de passos. Assim, a probabilidade PN (m) que
a partícula esteja localizada em uma posição m é equivalente à probabilidade WN (n1 ) de que a partícula deu n1
passos, i.e.,
PN (m) = WN (n1 ).
Podemos obter PN (m) simplesmente escrevendo WN (n1 ) em termos de m. Isso é realizado combinando as
Eqs. (1.3) e (1.4):
1
n1 = (N + m),
2
1
n2 = (N − m).
2
Substituindo-se estas relações na Eq. (1.7), podemos escrever finalmente:
PN (m) =
N!
p(N +m)/2 (1 − p)(N −m)/2
[(N + m)/2]![(N − m)/2]!
(1.10)
onde usamos que q = 1 − p conforme mostramos acima. Note que N + m e N − m são inteiros pares pois são
iguais a 2n1 e 2n2 .
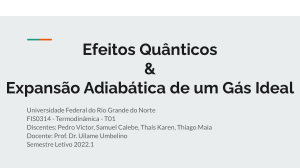
Como um exemplo ilustrativo, considere que as probabilidades dos passos para a direita e esquerda são iguais,
i.e., p = q = 1/2 e que o número total de passos é N = 20. Substituindo-se estes valores na Eq. (1.10) obtemos o
gráfico mostrado na Fig. 1.2. O resultado é óbvio: a distribuição tem um máximo para m = 0, ou seja, como as
probabilidades são iguais para a direita e esquerda, o deslocamento líquido mais provável é zero. Assim, após N
passos é mais provável que a partícula esteja em torno da origem.
1.2
Discussão geral de valores médios
Agora que temos uma expressão para a probabilidade, precisamos ainda determinar as quantidades físicas relevantes a partir da Eq. (1.10). No exemplo acima, consideramos todos os possíveis valores de m e substituímos estes
valores correspondentes na Eq. (1.10) para obter os valores das probabilidades. Como resultado, obtivemos um
valor máximo em m = 0, coerente com o valor esperado para iguais probabilidades de dar passos à direita ou à
esquerda da origem.
É claro que é possível extrair informações adicionais a partir da distribuição binomial, e nesta seção, vamos
aprender a fazer isso. Para tal, vamos considerar o caso geral de uma variável u que pode assumir M valores
CAPÍTULO 1. INTRODUÇÃO AOS MÉTODOS ESTATÍSTICOS
12
0.20
P
0.18
20
(m)
0.16
0.14
0.10
P
20
(m)
0.12
0.08
0.06
0.04
0.02
0.00
-20
-15
-10
-5
0
5
10
15
20
m
Figura 1.2: Nesta figura, temos um total N = 20 passos e iguais probabilidades para esquerda e direita. O envelope em
destes valores discretos é uma curva em forma de sino. O significado físico disto é óbvio. Após N passos aleatórios, a
probabilidade da partícula estar a uma distância de N passos da origem é muito pequena enquanto que é mais provável que
a partícula fique localizada em torno da origem para m = 0.
discretos
u1 , u2 , u3 , u4 , u5 , · · · uM
com as respectivas probabilidades
P (u1 ), P (u2 ), P (u3 ), P (u4 ), P (u5 ), · · · P (uM ).
O valor médio (ou simplesmente média) de u, denotado por ū, é definido por:
ū =
P (u1 )u1 + P (u2 )u2 + P (u3 )u3 + · · · + P (uM )uM
,
P (u1 ) + P (u2 ) + P (u3 ) + · · · + P (uM )
o que pode ser expresso em uma notação mais compacta:
M
∑
ū =
P (un )un
n=1
M
∑
n=1
.
P (un )
(1.11)
1.2. DISCUSSÃO GERAL DE VALORES MÉDIOS
13
A Eq. (1.11) já foi usada por você quando calcula médias aritméticas. De fato, se queremos calcular a média
das notas de uma classe, fazemos isso simplesmente somando todas as notas e então dividimos pelo no total de
alunos. Mas isso é exatamente o que está sendo proposto na Eq. (1.11). Para ver isso, precisamos apenas organizar
os dados. Vamos considerar que para uma turma de N alunos, temos n1 alunos com nota u1 , n2 alunos com nota
u2 , etc.. Isto significa que temos uma probabilidade P (u1 ) = n1 /N de encontrar alunos com nota u1 , P (u2 ) =
n2 /N de encontrar alunos com nota u2 e assim sucessivamente. Aqui convém lembrar que a probabilidade é
definida como a razão do número de eventos que ocorrem no ensemble pelo número total de elementos. Assim,
média ū das notas da turma pode ser calculada da seguinte forma:
ū =
u1 P (u1 ) + u2 P (u2 ) + · · · uN P (uN )
P (u1 ) + P (u2 ) + · · · P (uN )
e substituindo-se os valores das probabilidades como P (uj ) = uj /N obtemos ainda
n1
n2
nN
u1 + u2 + · · · uN
N
N
N
ū =
n1 n2
nN
+
+···+
N
N
N
ū =
u1 n1 + u2 n2 + · · · uN nN
u1 n1 + u2 n2 + · · · uN nN
=
n1 + n2 + · · · nN
N
e reconhecemos a última fração como a média aritmética das notas dos alunos. Note que a média aritmética
aparece quando a distribuição de probabilidades se reduz à frações do tipo nj /N . No caso geral, a distribuição
de probabilidades pode ser mais complicada e representada por uma função qualquer. No caso do problema da
caminhada aleatória, deduzimos que P (uj ) é uma distribuição binomial.
Para uma dada função f (u) qualquer, podemos calcular o seu valor médio da seguinte maneira:
M
∑
f (u) =
P (un )f (un )
n=1
M
∑
.
(1.12)
P (un )
n=1
A expressão dada pelas Eqs. (1.11) e (1.12) podem ser simplificadas considerando que a soma de todas as
probabilidades deve ser igual a 1. Isto equivale a dizer que a probabilidade de se ter qualquer resultado possível,
dentro é claro de todas as possibilidades, é de 100%. Assim, temos:
P (u1 ) + P (u2 ) + · · · + P (uM ) =
M
∑
P (un ) = 1
n=1
que é chamada “condição de normalização" satisfeita por toda distribuição de probabilidade. Como resultado, a
Eq. (1.12) se torna:
f (u) =
M
∑
n=1
P (un )f (un ).
(1.13)
CAPÍTULO 1. INTRODUÇÃO AOS MÉTODOS ESTATÍSTICOS
14
A partir da Eq. (1.13) podemos obter alguns resultados gerais. Se f (u) e g(u) são quaisquer duas funções de
u, então podemos escrever
f (u) + g(u) =
M
∑
P (un )[f (un ) + g(u)] =
n=1
M
∑
P (un )f (un ) +
n=1
M
∑
P (un )g(u)
n=1
ou seja,
f (u) + g(u) = f (u) + g(u).
(1.14)
Além disso, se temos um constante C multiplicando a função f (u), então podemos escrever:
Cf (u) =
M
∑
M
∑
P (un )Cf (un ) = C
n=1
P (un )f (un )
n=1
ou seja,
Cf (u) = Cf (u).
(1.15)
Acima calculamos o valor médio das notas de uma turma com N estudantes. O valor médio ū meramente nos
mostra o valor central em torno do qual os demais valores ui distribuídos. Isto nos permite determinar uma das
características da distribuição de probabilidade. Para obter informações mais detalhadas acerca da distribuição,
precisamos determinar outras quantidades médias. Neste caso, a próxima quantidade importante é o desvio do
valor médio, definido como:
∆u ≡ u − ū
(1.16)
que nos fornece uma medida quantitativa da distribuição dos valores ui em torno da média. Usando a Eq. (1.14)
podemos calcular o valor médio do desvio:
¯.
∆u = u − ū = ū − ū
¯ é a média do valor médio. Desde que o valor médio é um número, então para fins de
Agora, a quantidade ū
¯ = ū. Verifique isso usando a definição da média.
cálculo este se comporta como uma constante, assim, temos que ū
Assim, temos que:
∆u = u − ū = ū − ū = 0.
Este resultado nos diz que o desvio médio em relação a média é zero. Isso é resultado do fato do desvio
apresentar valores positivos e negativos de maneira que a média fica no centro destes valores. Como resultado o
valor médio do desvio deve ser nulo.
1.2. DISCUSSÃO GERAL DE VALORES MÉDIOS
15
Outro valor médio útil é a média do desvio ao quadrado, que também é chamado de segundo momento de u
em torno de sua média ou ainda, de dispersão de u. Este é definido como:
(∆u)2 =
M
∑
P (un )(un − ū)2 ≥ 0
(1.17)
n=1
onde notamos que a dispersão de u é sempre um no positivo. Note então que, diferente da média do desvio, a
dispersão somente será nula para o caso de todos valores un serem iguais a média. Além disso, quanto maior o
espalhamento dos valores un em torno da média, maior será o valor de (∆u)2 .
Para calcular a dispersão de qualquer distribuição, observamos primeiramente a seguinte relação:
(∆u)2 = (u − ū)2 = u2 − 2uū + ū2
= u2 − 2ūū + ū2 = u2 − 2ū2 + ū2 = u2 − ū2
(∆u)2 = u2 − ū2
(1.18)
o que implica em
u2 ≥ ū2 ,
desde que (∆u)2 ≥ 0.
Podemos ainda definir momentos de ordem superior tais como (∆u)n , o n-ésimo momento de u em torno de
sua média para n > 2. Estes momentos de ordem superior são menos úteis nos cálculos e, em geral, utilizamos os
momentos até segunda ordem.
Notamos ainda que o conhecimento de P (u) nos fornece a informação completa sobre a distribuição de probabilidades. Um conhecimento de poucos momentos, como ū e (∆u)2 implica em apenas uma informação parcial,
embora útil, sobre a distribuição de valores. Em problemas gerais de física, podemos determinar apenas alguns
destes momentos da distribuição sendo muito raro ter acesso à equação para a função distribuição. No caso do
problema da caminhada aleatória, conhecemos a distribuição e podemos determinar todos os momentos da distribuição. A seguir, faremos o cálculo do valor médio e da dispersão dos valores do deslocamento em torno da
média.
1.2.1
Cálculo dos valores médios para o problema da caminhada aleatória
No problema da caminhada aleatória obtivemos a função distribuição dada pela Eq. (1.8)
W (n1 ) =
N!
pn1 q N −n1 .
n1 !(N − n1 )!
CAPÍTULO 1. INTRODUÇÃO AOS MÉTODOS ESTATÍSTICOS
16
onde omitimos o índice N em W para simplificar a notação.
Antes de calcular os valores médios, vamos verificar a condição de normalização que deve ser verificada por
toda a distribuição de probabilidades:
N
∑
W (n1 ) = 1.
n1 =1
Substituindo-se a distribuição de probabilidades (1.8) obtemos:
N
∑
n1
N!
pn1 q N −n1
n
!(N
−
n
)!
1
1
=1
mas como vimos pela Eq. (1.9), a soma acima é a própria distribuição de Newton, i.e.,
N
∑
n1
N!
pn1 q N −n1 = (p + q)N
n
!(N
−
n
)!
1
1
=1
mas como q = 1 − p então vemos que
(p + q)N = (p + 1 − p)N = 1,
logo, vemos que a condição de normalização é satisfeita.
Cálculo dos valores médios
Vamos agora determinar o valor médio de n1 , o número de passos para a direita. Usando a definição do cálculo do
valor da média temos que:
n̄1 =
N
∑
W (n1 )n1 =
n1 =0
N
∑
n1
n1 =0
n̄1 =
N!
pn1 q N −n1
n1 !(N − n1 )!
N
∑
n1
N!
[n1 pn1 ]q N −n1
n
!(N
−
n
)!
1
1
=0
onde destacamos o fator n1 pn1 . Desde que o problema se resume a calcular a soma acima, observamos que:
n1 pn1 = p
∂ n1
(p )
∂p
e, assim, substituindo esta equação na soma temos:
n̄1 =
N
∑
n1
N!
∂
q N −n1 p (pn1 )
n !(N − n1 )!
∂p
=0 1
1.2. DISCUSSÃO GERAL DE VALORES MÉDIOS
17
e desde que não existe dependência dos limites da soma com p, podemos retirar o fator p∂/∂p para fora da soma,
i.e.,
N
∂ ∑
N!
n̄1 = p
q N −n1 pn1
∂p n =0 n1 !(N − n1 )!
1
e usando novamente a distribuição binomial temos que:
n̄1 = p
∂
(p + q)N .
∂p
Aqui convém notar que o cálculo desenvolvido é válido considerando que p e q são dois parâmetros arbitrários.
Assim, não podemos efetuar a troca de p = 1 − q pois esta seria uma particularização de p e q. Assim, aplicando a
derivada parcial sobre o binômio, segue que:
n̄1 = N p(p + q)N −1 .
Agora sim, uma vez que temos o resultado geral, podemos fazer a particularização do mesmo para o caso em
que p + q = 1. Assim, obtemos o resultado simples:
n̄1 = N p.
(1.19)
Agora sabemos também que
n1 + n2 = N
e tomando a média, temos que:
n̄2 = N − n̄1
e substituindo-se n̄1 = N p, segue que:
n̄2 = N − N p = N (1 − p) = N q.
O valor do deslocamento médio pode ser facilmente determinado uma vez que temos a média do no de passos
em ambos os sentidos. De fato, segundo a definição do deslocamento médio, temos:
m = n1 − n2
logo, o valor médio será
m̄ = n̄1 − n̄2
e substituindo-se os valores de n̄1 e n̄2 , obtemos ainda:
m̄ = N (p − q).
CAPÍTULO 1. INTRODUÇÃO AOS MÉTODOS ESTATÍSTICOS
18
Calculo da dispersão
O próximo passo é a determinação da dispersão definida pela Eq. (1.18), a qual pode ser particularizada para o
caso presente:
(∆n1 )2 ≡ n1 − n̄21 = n21 − n̄21 .
(1.20)
Como já conhecemos o valor da média, precisamos apenas determinar o valor médio de n21 . Para isso, aplicamos a Eq. (1.13) com a distribuição binomial no lugar de P (un ), assim, segue que:
n21
=
N
∑
W (n1 )n21
n1 =0
e substituindo W (n1 ) obtemos:
n21
=
N
∑
n1
N!
pn1 q N −n1 n21 .
n
!(N
−
n
)!
1
=0 1
Aqui usamos o mesmo procedimento adotado para o cálculo da média do valor n1 . Neste caso, observamos
que a expressão abaixo nos permite eliminar o fator n21 :
(
n21 pn1
∂
= p
∂p
)2
pn1 .
Podemos verificar a expressão acima calculando diretamente:
(
∂
p
∂p
)2
(
p
∂pn1
∂
p
=p
∂p
∂p
n1
(
∂
p
∂p
)2
pn1 = p
)
[
∂pn1
∂ 2 pn1
=p
+p
∂p
∂p2
]
∂ 2 pn1
∂pn1
+ p2
∂p
∂p2
e aplicando as derivadas, segue que:
(
p
∂
∂p
)2
pn1 = n1 pn1 + p2 n1 (n1 − 1)pn1 −2 = n1 pn1 + n21 pn1 − n1 pn1 = n21 pn1
que é a relação que gostaríamos de demonstrar.
Substituindo esta relação na equação para o valor médio, obtemos:
n21
=
N
∑
n1
N!
q N −n1 [n21 pn1 ]
n
!(N
−
n
)!
1
=0 1
ou ainda
n21
=
N
∑
n1
(
N!
∂
q N −n1 p
n !(N − n1 )!
∂p
=0 1
)2
pn1
1.2. DISCUSSÃO GERAL DE VALORES MÉDIOS
19
e trocando a ordem entre a soma e a integração, segue que:
(
n21
∂
= p
∂p
)2 ∑
N
n1
N!
q N −n1 pn1
n
!(N
−
n
)!
1
1
=0
e considerando novamente que q e p são arbitrários, podemos escrever a soma usando a relação do teorema binomial, i.e.,
(
n21
∂
= p
∂p
)2
[
]
]
∂
∂(p + q)N
∂ [
(p + q) = p
p
=p
pN (p + q)N −1
∂p
∂p
∂p
N
e aplicando a outra derivada obtemos:
[
n21 = p pN (N − 1)(p + q)N −2 + N (p + q)N −1
]
e como este é o resultado final, podemos particularizar para o caso em que p e q são probabilidades onde vale a
restrição p + q = 1, assim:
n21 = p[N (N − 1)p + N ] = p[pN 2 − pN + N ] = p[pN 2 + (1 − p)N ] = (pN )2 + N pq
e de acordo com a Eq. (1.19) temos que n̄1 = N p assim, podemos escrever:
n21 = n̄21 + N pq
∴
n21 − n̄21 = N pq
e identificamos o primeiro membro com a dispersão através da Eq. (1.20), assim, temos:
(∆n1 )2 = N pq.
(1.21)
Quando a Eq. (1.21) é comparada com os deslocamentos, vemos que a dispersão é quadrática no deslocamento.
Em outras palavras, como x = (n1 − n2 )l, então uma quantidade que depende do quadrado do número de passos à
direita estará relacionada com o quadrado do deslocamento x. Assim, sua raíz quadrada, chamada de desvio médio
quadrático ou do inglês root mean square deviation1 é linear no comprimento e fornece uma medida linear da
largura do intervalo dentro do qual os valores de n1 estão distribuídos. Definimos então o desvio médio quadrático
da seguinte forma:
∆∗ n1 = [(∆n1 )2 ]1/2 =
√
N pq.
(1.22)
Outra medida muito usada para a dispersão é a chamada largura relativa definida como a razão do desvio médio
quadrático pelo valor médio, i.e.,
1
√
√
∆∗ n1
N pq
q 1
√ .
=
=
n̄1
Np
p N
(1.23)
Esta quantidade também é escrita como rms deviation. Você já deve ter ouvido falar em potência rms ou ainda na velocidade rms na
introdução à teoria cinética dos gases no seu curso de física introdutório.
CAPÍTULO 1. INTRODUÇÃO AOS MÉTODOS ESTATÍSTICOS
20
Note que embora o valor médio aumente com N a largura relativa diminui com N −1/2 e a distribuição vai se
tornando cada vez mais concentrada a medida que N cresce.
Agora que determinamos os parâmetros relativos ao no de passos para a direita, podemos determinar as mesmas
quantidades para o deslocamento líquido m. Com efeito, temos que
m = 2n1 − N
o que nos permite escrever:
∆m = m − m̄
∆m = 2n1 − N − (2n̄1 − N ) = 2(n1 − n̄1 ) = 2∆n1
∴
(∆m)2 = 4(∆n1 )2
ou ainda,
(∆m)2 = 4(∆n1 )2
e substituindo-se o valor previamente calculado de (∆n1 )2 temos que:
(∆m)2 = 4N pq.
1.3
Distribuição de probabilidades para N grande
Conforme podemos observar da Eq. (1.23), a distribuição binomial W (n1 ) tende a apresentar um máximo proe 1 e decresce rapidamente para grandes valores de N . Podemos usar este fato
nunciado para um dado valor n1 = n
para obter uma expressão aproximada para W (n1 ) válida para N → ∞.
Para N grande, considere regiões próximas do valor máximo da distribuição binomial, onde n1 também é
grande. Neste caso, a mudança fracional de W (n1 ) quando n1 muda por uma unidade é relativamente pequena,
ou seja,
|W (n1 + 1) − W (n1 )| ≪ W (n1 ).
Com isso, podemos considerar como uma ótima aproximação, que W pode ser considerado uma função contínua da variável n1 embora n1 só tenha significado para valores inteiros. A localização do valor máximo da função
distribuição é determinada através da condição:
∂W
∂n1
n1 =e
n1
= 0,
ou, equivalentemente,
∂ ln W
∂n1
n1 =e
n1
= 0.
1.3. DISTRIBUIÇÃO DE PROBABILIDADES PARA N GRANDE
21
Esta condição é sempre usada para determinar o ponto de inflexão de uma função. Em nosso caso, a distribuição binomial tem apenas um pico de modo que o ponto de inflexão é exatamente o ponto de máximo. Note que no
caso geral, precisamos ainda determinar o sinal da segunda derivada no ponto onde a primeira derivada se anula
para verificar se o ponto de inflexão é máximo ou mínimo. Recomendamos uma revisão deste tópico nos livros de
cálculo elementar.
Desde que a função W (n1 ) é fortemente concentrada para N grande, trabalhamos com o seu logaritmo
ln W (n1 ) que apresenta uma variação muito mais suave em comparação com a própria W (n1 ). De fato, pode
ser mostrado que a convergência da série do logaritmo é muito mais rápida do que a convergência da série da
função.
Isto pode ser observado analisando-se a expansão para a função f = (1 + y)−N para N grande. Se y ≪ 1,
podemos escrever a expansão para esta função por meio da série de Taylor:
1
f (y) = 1 − N y + N (N + 1)y 2 + · · ·
2
e vemos então que para N grande a série acima diverge desde que N y & 1 mesmo para valores pequenos de y.
Um modo que contornar esta dificuldade, é trabalhar com o logartimo da função acima, ou seja,
ln f = −N ln(1 + y)
e expandindo o logartimo2 , temos que:
(
y2 y3
ln f = −N y − + + · · ·
2
3
o que nos permite escrever:
(
f (y) = e
2
3
−N y− y2 + y3 +···
)
)
que converge rapidamente para N grande e y . 1.
e 1 . Assim, escreveVamos então obter a expansão de ln W em série de Taylor em torno do ponto de máximo n
mos:
1
1
e 1 ) + B1 η + B2 η 2 + B3 η 3 + · · ·
ln W (n1 ) = ln W (n
2
3!
2
É completamente simples obter a expansão do logaritmo. Para isso lembramos que
∑
1
(−1)n xn
=
1+x
n
e integrando em ambos os lados obtemos
∫
0
x
∑
1
(−1)n
dx =
1+x
n
∫
x
xn dx
0
∴
ln(1 + x) =
∑
(−1)n
n
xn+1
x2 x3
= x−
+
−···
n+1
2
3
(1.24)
CAPÍTULO 1. INTRODUÇÃO AOS MÉTODOS ESTATÍSTICOS
22
onde definimos
e1
η = n1 − n
e
Bγ =
e1)
dγ ln W (n
γ
dn1
e 1 . Desde que estamos expandindo a função em
como a γ-ésima derivada de ln W calculada no ponto n1 = n
torno de seu ponto de máximo, a primeira derivada deve ser nula neste ponto, assim B1 = 0. Além disso, desde
que é um ponto de máximo, então a derivada segunda deve ter um valor negativo quando calculada neste ponto.
f = W (n
e 1 ), podemos escrever a
Explicitamente, escrevemos então B2 = −|B2 |. Usando a notação abreviada W
Eq. (1.24) da seguinte maneira
f e 2 B2 η
W (n1 ) = W
1
2 + 1 B η 3 +···
6 3
f e− 2 |B2 |η e 6 B3 η
=W
1
2
1
3 ···
.
(1.25)
Como estamos considerando regiões em torno do ponto de máximo, então η ≪ 1 e, assim, podemos desprezar
os termos de terceira ordem em η e superiores. Com isso, escrevemos a Eq. (1.25) na forma aproximada:
f e− 2 |B2 |η .
W (n1 ) ∼ W
1
2
(1.26)
Resta determinar o valor da derivada de W (n1 ). Para isso, recorremos à expressão de W dada pela Eq. (1.8)
W (n1 ) =
N!
pn1 q N −n1 .
n1 !(N − n1 )!
e tomando logaritmo, segue que:
ln W (n1 ) = ln N ! − ln n1 ! − ln(N − n1 )! + n1 ln p + (N − n1 ) ln q
e, em princípio, precisaríamos determinar o valor da derivada de um fatorial. No entanto, podemos simplificar
a expressão acima no limite de n1 grande que estamos considerando. Com efeito, se n1 ≫ 1, então podemos
considerar ln n1 ! aproximadamente contínuo desde que a mudança de n1 por uma unidade causa uma mudança
muito pequena no logaritmo. Assim, podemos aproximar a derivada de ln n1 usando a definição de derivada, i.e.,
(n1 + 1)!
d ln n1 ! ln(n1 + 1)! − ln n1 !
≈
= ln
= ln(n1 + 1)
dn1
1
n1 !
e como n1 ≫ 1, então ln(n1 + 1) ≈ ln n1 e obtemos a nossa derivada aproximada na forma:
d ln n1 !
≈ ln n1 .
dn1
(1.27)
1.3. DISTRIBUIÇÃO DE PROBABILIDADES PARA N GRANDE
23
Tomando a derivada de ln W usando a Eq. (1.27) e levando em conta que N é constante, temos:
d ln W (n1 )
d ln n1 ! d ln(N − n1 )! d[n1 ln p] d[(N − n1 ) ln q]
=−
−
+
+
dn1
dn1
dn1
dn1
dn1
[
d ln W (n1 )
(N − n1 )p
= − ln n1 + ln(N − n1 ) + ln p − ln q = ln
dn1
n1 q
]
e 1 , devemos ter a derivada acima igual a zero,
e calculando esta derivada no seu valor máximo, i.e., fazendo n1 = n
então temos:
d ln W (n1 )
dn1
[
n1 =e
n1
= ln
]
e 1 )p
(N − n
=0
e1q
n
de onde obtemos:
e 1 )p
(N − n
=1
e1q
n
∴
e1p = n
e1q
Np−n
e como p + q = 1, obtemos ainda
e 1 = N p.
n
Agora, precisamos determinar a segunda derivada de ln W , para isso basta diferenciar a primeira derivada mais
uma vez:
[
]
[
d2 ln W (n1 )
d
(N − n1 )p
n1 q
d (N − n1 )p
=
ln
=
2
dn1
n1 q
(N − n1 )p dn1
n1 q
dn1
[
]
[
]
d2 ln W (n1 )
n1 q
−pn1 q − q(N − n1 )p
n1 q
pqN
=
=−
2
2
2
(N − n1 )p
(N − n1 )p n21 q 2
dn1
n1 q
d2 ln W (n1 )
N
=−
2
n1 (N − n1 )
dn1
e 1 , vamos obter:
e fazendo-se n1 = n
d2 ln W (n1 )
dn21
n1 =e
n1
=−
1
N
=−
N p(N − N p)
N pq
logo,
B2 = −
1
N pq
]
CAPÍTULO 1. INTRODUÇÃO AOS MÉTODOS ESTATÍSTICOS
24
e1.
e vemos que apresenta um valor negativo como era esperado pois W deve apresentar um valor máximo em n1 = n
f que pode ser calculado requerendo que a soma sobre todos os valores de
Resta ainda determinar o valor W
W deve igual à unidade. Lembremos que a função distribuição nos fornece a probabilidade de que a partícula
tenha dado n1 passos. Assim, quando somamos sobre todos os valores de n1 estamos na verdade considerando a
probabilidade da partícula dar qualquer passo, o que deve ser igual a 1.
Como estamos considerando uma aproximação em que n1 se assemelha à uma variável contínua, então devemos trocar a soma por uma integração. Assim, o que estamos dizendo efetivamente se reduz a
N
∑
W (n1 ) ≈
∫
∫
W (n1 ) dn1 =
+∞
−∞
n1 =0
W (η) dη = 1.
e 1 e, portanto, pode assumir tanto valores positivos
Aqui são importantes duas observações: (a) η = n1 − n
quanto negativos; (b) estendemos os limites da integração em η para ±∞ o que equivale a dizer que N → ∞,
ou seja, estamos considerando uma aproximação dentro da qual o número de passos é tão grande que pode ser
considerado infinito. Desde que a distribuição se torna cada mais estreita e localizada em torno de seu valor
e 1 , então W é essencialmente zero para valores de n1 com três ou quatro vezes o valor da dispersão.
máximo n
Assim, os limites podem ser estendidos com um erro negligenciável.
f basta substituir a distribuição dada pela Eq. (1.26) na integral acima, i.e.,
Para obter o valor do coeficiente W
∫
+∞
−∞
f
W
∫
+∞
−∞
W (η) dη = 1
e− 2 |B2 |η dη = 1
1
2
f fora do sinal de integração porque este é constante. A integral tem solução conhecida:
onde mantivemos W
∫
√
+∞
−∞
e
− 12 |B2 |η 2
dη =
2π
|B2 |
assim,
√
f
W
√
2π
=1
|B2 |
∴
f=
W
|B2 |
.
2π
Substituindo-se este resultado na Eq. (1.26) obtemos a seguinte distribuição normalizada:
√
W (n1 ) =
|B2 | − 1 |B2 |(n1 −en1 )2
e 2
.
2π
(1.28)
A distribuição acima é chamada de distribuição Gaussiana. Para chegar nesta distribuição apenas tomamos o
limite contínuo da distribuição binomial. Da mesma forma que a distribuição binomial, a distribuição Gaussiana é
1.4. DISTRIBUIÇÕES DE PROBABILIDADE GAUSSIANAS
25
bastante geral e aparece em vários ramos da Física e outras áreas. Com efeito, esta distribuição aparece sempre que
e 1 , vamos substituí-los
trabalhamos com estatísticas de grandes números. Como já determinamos o valores de B2 e n
na Eq. (1.28):
[
]
1
(n1 − N p)2
W (n1 ) =
exp
−
.
2N pq
[2πN pq]1/2
(1.29)
Se voltarmos aos resultados da distribuição binomial para a dispersão e o valor médio da distribuição binomial:
[
]
1
(n1 − n̄1 )2
W (n1 ) =
exp −
.
[2π(∆n1 )2 ]1/2
2(∆n1 )2
1.4
(1.30)
Distribuições de probabilidade Gaussianas
Podemos escrever a Eq. (1.29) em termos do deslocamento líquido m de modo que a distribuição de probabilidade forneça a probabilidade de um determinado deslocamento para um grande número N de passos. Para isso,
relembramos que n1 = (N + m)/2. Assim, temos que:
(
P (m) = W
N +m
2
)
[
]
1
((N + m)/2 − N p)2
=
exp
−
.
2N pq
[2πN pq]1/2
Para simplificar o numerador do argumento da exponencial, escrevemos:
N +m
1
1
− N p = (N + m − 2N p) = [N + m − N (p + 1 − q)]
2
2
2
1
1
= [N + m − N p − N + N q)] = [m − N (p − q)]
2
2
e substituindo na distribuição, segue que:
[
]
1
[m − N (p − q)]2
P (m) =
exp
−
.
8N pq
[2πN pq]1/2
Aqui será conveniente trabalhar com o deslocamento real x da partícula o qual está relacionado com o deslocamento líquido pela Eq. (1.1)
x = ml
lembrando que l é o comprimento de cada passo. Note que como os valores de m estão separados por ∆m = 2, x
varia em incrementos de 2l. Agora, se l é muito pequeno comparado ao menor comprimento físico de interesse,
os incrementos de 2l são muito pequenos e x também pode ser tomado como uma variável contínua no limite
de N grande. Além disso, neste mesmo limite P (m) não pode variar muito de um dado valor m para o seu
valor adjacente, ou seja, |P (m + 2) − P (m)| ≪ P (m). Com isso, a distribuição de probabilidade P (m) pode ser
CAPÍTULO 1. INTRODUÇÃO AOS MÉTODOS ESTATÍSTICOS
26
considerada como uma função contínua de x da mesma forma que fizemos com W (n1 ). Na Fig. 1.3 é mostrado
um esboço de um histograma para um valor grande de N . Este gráfico é similar ao que foi calculado na Fig. 1.2
para N = 20. A densidade de barras é muito alta e a curva que toca os pontos de cada barra pode ser considerada
uma função contínua.
Figura 1.3: A probabilidade P (m) do deslocamento líquido m quando o número de passos N é muito grande e o comprimento l de cada passo é muito pequeno.
Nestas circunstâncias consideramos x como uma variável contínua em uma escala macroscópica e queremos
determinar a probabilidade de encontrar a partícula após N passos no intervalo definido entre x e x + dx. É
importante observar que dx é uma diferencial no sentido macroscópico, i.e., se L é a menor distância de relevância
macroscópica, então dx ≪ L. No entanto, temos ainda que o intervalo dx compreende muitos passos l, ou seja,
dx ≫ l. Em resumo, dx é microscopicamente grande mas macroscopicamente pequeno.
Para obter a probabilidade para que a partícula esteja no intervalo entre x e x + dx, precisamos somar todas as
probabilidades P (m) que estão contidas no intervalo dx. Este valor é simplesmente igual a dx/2l que é o número
de pontos contidos no intervalo dx. Vemos então que a probabilidade é proporcional a dx e é usualmente escrita
na seguinte forma:
P(x) dx = P (m)
dx
2l
onde a quantidade P(x), que independe do tamanho do intervalo dx, é a chamada densidade de probabilidade.
Note que para calcular a probabilidade sempre devemos multiplicar P(x) pelo elemento de comprimento dx.
1.4. DISTRIBUIÇÕES DE PROBABILIDADE GAUSSIANAS
27
Substituindo P (m), vamos obter:
[
1
[m − N (p − q)]2
P(x) dx =
exp
−
8N pq
[2πN pq]1/2
]
dx
2l
e como x = ml, segue que:
[
1
[x − N (p − q)l]2
P(x) dx =
exp
−
8N pql2
[2π4N pql2 ]1/2
]
dx.
Aqui, definimos as seguintes quantidades:
√
σ = 2l N pq
(1.31)
µ = (p − q)N l
(1.32)
e substituindo-se estas definições na distribuição Gaussiana, obtemos ainda
[
1
[x − µ]2
P(x) dx = √
exp −
2σ 2
2πσ
]
dx.
(1.33)
A distribuição Gaussiana é completamente geral no sentido de que quaisquer considerações probabilísticas
sobre um número muito grande de experimentos preparados de maneira similar pode levar à expressão dada pela
Eq. (1.33). Da mesma forma que fizemos para a distribuição binomial, é possível determinar os momentos da
distribuição através da Eq. (1.33) da mesma forma que fizemos com a distribuição binomial. Neste caso, porém,
teremos que lidar com integrações em vez de somas sobre números discretos. Além disso, a aproximação que
permite fazer os limites de integração tenderem ao infinito pode ser realizada desde que P(x) ser torna muito
pequeno a medida que |x| se torna muito grande. A seguir, ilustramos em detalhes os cálculos dos momentos da
distribuição Gaussiana da mesma forma que foi realizado para o caso da distribuição binomial. Primeiramente,
consideramos a verificação da normalização da distribuição Gaussiana:
∫
[
∫
+∞
1
[x − µ]2
P(x) dx = √
exp −
2σ 2
2πσ −∞
−∞
√
e fazendo a troca de variável y = (x − µ)/ 2σ, podemos escrever ainda
+∞
∫
+∞
−∞
1
P(x) dx = √
π
∫
+∞
−∞
]
dx
e−y dy
2
e usando o resultado3
∫
+∞
−∞
3
e−x dx =
2
√
π
(1.34)
O resultado que usamos [Eq. (1.34)] na verificação da condição de normalização é bastante conhecida. O cálculo desta integração é
realizado no apêndice A.2., pg. 606 do livro-texto do Reif. Recomendo fortemente o estudo do cálculo desta integral.
CAPÍTULO 1. INTRODUÇÃO AOS MÉTODOS ESTATÍSTICOS
28
podemos escrever:
∫
+∞
−∞
1
P(x) dx = √
2πσ
∫
+∞
−∞
[
y2
exp − 2
2σ
]
dy
vemos que
∫
+∞
−∞
1 √
P(x) dx = √
π = 1,
π
e a distribuição está normalizada.
O próximo passo é a determinação do valor médio do deslocamento, i.e., calcular x̄. Para isso, usamos a
definição da média:
∫
x̄ =
+∞
xP(x) dx
−∞
e substituindo a distribuição, segue que:
1
x̄ = √
2πσ
∫
+∞
−∞
[
[x − µ]2
x exp −
2σ 2
]
dx
e fazendo-se a troca de variável y = x − µ, obtemos:
∫
1
x̄ = √
2πσ
+∞
−∞
ye−y
2 /2σ 2
µ
dy + √
2πσ
∫
+∞
−∞
e−y
2 /2σ 2
dy
e vemos que a primeira integral é zero pois é uma integral de uma função ímpar4 em um intervalo simétrico
enquanto que a segunda integral é simplesmente a integral da distribuição multiplicada pela constante µ. Assim,
4
Lembre-se que uma função ímpar é qualquer função que tenha a propriedade:
f (−x) = −f (x)
(1.35)
e a integral de uma função ímpar em um intevalo simétrico do tipo [−a, a] é nula. Podemos mostrar isso facilmente. Considere a integral
abaixo:
∫
∫
+a
∫
0
f (x) dx =
+a
f (x) dx +
−a
−a
f (x) dx
0
e fazendo a troca de variável x = −x′ na primeira integração segue que:
∫
∫
+a
0
f (x) dx = −
−a
f (−x′ ) dx′ +
∫
+a
f (x) dx
a
0
e invertendo os limites da primeira integral, cancelamos o sinal negativo, assim:
∫
∫
+a
f (x) dx =
−a
∫
a
f (−x) dx +
0
∫
+a
f (x) dx =
0
+a
[f (−x) + f (x)] dx = 0
0
onde voltamos a chamar x′ de x pois isto não altera o valor da integração. Além disso, agrupamos as duas integrais em apenas uma de 0
até +a. Usando a definição de função ímpar [Eq. (1.35)], mostramos então que a última integral é nula.
1.5. DISCUSSÃO GERAL DO PROBLEMA DA CAMINHADA ALEATÓRIA
29
como já provamos que a distribuição é normalizada, então a integral é igual a 1. Logo, escrevemos:
x̄ = 0 + µ × 1
∴
x̄ = µ.
(1.36)
Se você fizer um gráfico de P irá notar que a distribuição é simétrica em torno do ponto µ. Assim, o resultado
da média do valor de x ser igual a µ já era um resultado esperado.
A próxima quantidade é a dispersão. Já usando o valor da média como sendo igual a µ, podemos escrever:
(x − µ)2
1
=√
2πσ
∫
+∞
−∞
[
[x − µ]2
(x − µ) exp −
2σ 2
2
]
dx
e trocando y = x − µ, podemos escrever ainda5
1
(x − µ)2 = √
2πσ
∫
+∞
−∞
1
dy = √
2πσ
2 −y 2 /2σ 2
y e
[√
π
(2σ 2 )3/2
2
]
logo,
(x − µ)2 = σ 2
(1.37)
Como já conhecemos os valores de µ e σ [Eqs. (1.31) e (1.32)], podemos escrever a média e a dispersão na
forma:
√
x̄ = 2l N pq,
(1.38)
(∆x)2 = (p − q)N l.
1.5
(1.39)
Discussão Geral do problema da caminhada aleatória
Até o momento consideramos o problema da caminhada aleatória como sendo realizado através de uma séries de
N passos de tamanhos fixos e iguais a l no caso unidimensional. Após isso, consideramos o limite de um número
muito grande de passos e obtivemos a distribuição Gaussiana. No entanto, a generalização dos resultados obtidos
para outras dimensões e ainda para o caso em que os passos têm tamanhos diferentes é bastante complicada. Por
esta razão, aqui nos voltamos para um formalismo mais geral apropriado para a aplicação nos sistemas futuros que
iremos estudar. Começamos considerando distribuições que são funções de mais de uma variável e então iremos
aplicar a generalização para o caso de um ensemble.
∫
5
+∞
Veja apêndice A.4. do livro do Reif para ver a solução da integral
−∞
y 2 e−y
2
/2σ 2
dy.
CAPÍTULO 1. INTRODUÇÃO AOS MÉTODOS ESTATÍSTICOS
30
1.5.1
Distribuições de probabilidades envolvendo várias variáveis
A descrição estatística de uma situação envolvendo mais de uma variável requer a generalização dos argumentos
probabilísticos que desenvolvemos para o caso de uma variável. Por simplicidade, vamos considerar o caso de
duas variáveis u e v que podem assumir os seguintes valores:
ui ,
onde i = 1, 2, 3 · · · , M
vj ,
onde
j = 1, 2, 3 · · · , N.
Seja P (ui , vj ) a probabilidade de que a variável u assuma o valor ui e a variável v assuma o valor vj . A
probabilidade que u e v assumam qualquer valor dentre todos valores possíveis deve ser igual à unidade, i.e.,
fazendo-se a soma sobre i e j devemos obter o requerimento de normalização:
M ∑
N
∑
P (ui , vj ) = 1.
(1.40)
i=1 j=1
A probabilidade de u assumir o valor u1 , independente do valor assumido por v, é a soma de todas as probabilidades de todas as situações possíveis consistentes com todos os valores de u, i.e.,
Pu (ui ) =
N
∑
P (ui , vj )
(1.41)
j=1
onde a soma é realizada sobre todos os valores de vj . Similarmente, a probabilidade da variável v assumir o valor
vj independentemente do valor assumido por u é obtida somando-se sobre todos os valores de u:
Pv (vj ) =
M
∑
P (ui , vj ).
(1.42)
i=1
Convém notar que :
M
∑
i=1
Pu (ui ) =
N
∑
j=1
Pv (vj ) =
M ∑
N
∑
P (ui , vj ) = 1,
i=1 j=1
que é a condição de normalização.
De todas as possibilidades relacionadas com as relações entre as variáveis u e v, consideraremos uma situação
particular em que os valores assumidos por uma variável não dependem dos valores da outra variável. Neste caso,
dizemos que as variáveis são estatisticamente independentes ou não-correlacionadas. Com isso, a distribuição
de probabilidades pode ser expressa de maneira muito simples em termos da probabilidade que u assuma um valor
ui para qualquer valor de v, que definimos como Pu (ui ), e em termos da probabilidade de v assumir o valor vj
para qualquer valor de Pv (vj ). Neste caso, podemos escrever:
P (ui , vj ) = Pu (ui )Pv (vj )
(1.43)
1.5. DISCUSSÃO GERAL DO PROBLEMA DA CAMINHADA ALEATÓRIA
31
se u e v são estatisticamente independentes.
Da mesma forma que foi feito para o caso de uma variável, podemos calcular os valores médios a partir da
distribuição P (ui , vj ). Para isso, consideremos uma função F (u, v) qualquer. O valor médio de F é definido
como:
F (u, v) =
M ∑
N
∑
P (ui , vj )F (ui , vj ).
(1.44)
i=1 j=1
Note que se f (u) é uma função apenas de u, segue pela Eq. (1.41) que
f (u) =
M ∑
N
∑
P (ui , vj )f (ui ) =
i=1 j=1
M
∑
i=1
f (u) =
M
∑
N
∑
P (ui , vj ) f (ui )
j=1
Pu (ui )f (ui ).
i=1
No caso de duas funções de u e v denotadas por F e G, então temos os seguintes resultados gerais:
F +G =
M ∑
N
∑
P (ui , vj ) (F (ui , vj ) + G(ui , vj ))
i=1 j=1
=
M ∑
N
∑
P (ui , vj )F (ui , vj ) +
i=1 j=1
M ∑
N
∑
P (ui , vj )G(ui , vj )
i=1 j=1
= F̄ + Ḡ
e observamos que a média da soma é igual a soma das médias.
Agora, considere duas funções f (u) e g(v). Se consideramos que as probabilidades de u e v são estatisticamente independentes, então podemos escrever:
f (u)g(v) =
M ∑
N
∑
P (ui , vj )f (ui )g(vj )
i=1 j=1
e como estamos considerando que não há correlação então vale a Eq. (1.43), i.e,
f (u)g(v) =
M ∑
N
∑
i=1 j=1
Pu (ui )Pv (vj )f (ui )g(vj ) =
[M
∑
]
Pu (ui )f (ui )
i=1
N
∑
Pv (vj )g(vj )
j=1
ou seja,
f (u)g(v) = f (u) g(v)
(1.45)
i.e., a média de um produto é igual ao produto das médias se u e v são estatisticamente independentes. A Eq.
(1.45) não é válida no caso em que a independência estatística não é verificada.
É claro que é possível generalizar os resultados obtidos acima para o caso de um número arbitrário de variáveis.
CAPÍTULO 1. INTRODUÇÃO AOS MÉTODOS ESTATÍSTICOS
32
1.5.2
Comentários sobre distribuições de probabilidade contínuas
Consideremos primeiramente o caso em que temos apenas uma variável u que pode assumir qualquer valor no
intervalo a1 < u < a2 . Conforme discutimos anteriormente, se propomos uma descrição probabilística para a
variável u, podemos focar em um intervalo infinitesimal entre u e u + du e perguntar pela probabilidade da variável
u assumir um valor dentro deste intervalo. Considerando um intervalo suficientemente pequeno, podemos escrever
esta probabilidade na forma P(u) du onde P(u) é a densidade de probabilidade, independente do tamanho do
intervalo considerado. No entanto, é possível reduzir o problema variáveis contínuas para um problema equivalente
de variáveis discretas.
Para isso, começamos dividindo o intervalo entre a1 e a2 em intervalos de tamanhos iguais a δu. Cada intervalo pode ser rotulado por um índice i. O valor de u em cada intervalo é ui e P (ui ) é a probabilidade de
encontrar a variável dentro deste intervalo δu. Esta subdivisão do intervalo nos permite trabalhar com um número
contável de valores da variável u. Isto permite utilizar todas as expressões desenvolvidas para o caso discreto que
demonstramos previamente.
O estabelecimento da conexão entre variáveis contínuas e discretas pode ser realizado considerando que o
intervalo du contém um grande número de intervalos δu. Assim, a probabilidade de encontrar u dentro do intervalo
δu é dada por
P (u) = P(u) δu
(1.46)
Considerando que du ≫ δu, então podemos dizer que há du/δu valores possíveis de ui no intervalo du.
Considerando que a probabilidade dentro de cada intervalo δu é aproximadamente a mesma, i.e., P (ui ) = P (u),
então a probabilidade de encontrar u no intervalo du, será:
P(u) du = P (u)
du
δu
(1.47)
onde trocamos a densidade de probabilidade pelo seu valor dado pela Eq. (1.46). A Eq. (1.47) oferece a conexão
entre a variável discreta e a contínua. De fato, P (u) é definida apenas em valores discretos determinados pela
quantidade de subdivisões δu contidas no intervalo total a1 < u < a2 .
Notamos que os valores médios e outras quantidades, que são definidas em termos de somatórios no caso
de variáveis discretas, serão determinadas através de integrações quando a variável é contínua. A condição de
normalização, por exemplo, é definida por:
∑
i
P (ui ) = 1.
(1.48)
1.5. DISCUSSÃO GERAL DO PROBLEMA DA CAMINHADA ALEATÓRIA
33
Mas no caso da variável contínua, é possível primeiramente somar as probabilidades discretas definidas no
intervalo du, o que nos permite obter P(u)du e, em seguida, efetuar a integração sobre u sobre todo o intervalo6 .
Desta forma a Eq. (1.48) se torna:
∫
a2
P(u) du = 1,
(1.49)
a1
que é a expressão da condição de normalização em termos da densidade de probabilidade. Similarmente, podemos
escrever os valores médios previamente definidos em termos de P(u). Com efeito, o valor médio de uma função
qualquer f (u) pode ser escrito na forma:
∫
a2
f (u) =
P(u)f (u) du.
a1
Vamos considerar agora o caso mais geral em que temos duas variáveis u e v, tal que a1 < u < a2 e b1 < v < b2 .
Neste caso, podemos falar da probabilidade de P(u, v) du dv que as variáveis estejam no intervalo u e u + du e
v e v + dv, respectivamente, onde P(u, v) é densidade de probabilidade independente do tamanho do elemento
du dv. Note que neste caso, os intervalos du e dv correspondem a uma área do espaço definido pelas variáveis u
e v. Este espaço é ilustrado na Fig. 1.4 onde observamos que os intervalos du e dv são subdivididos em intervalos
δu e δv ainda menores rotulados por índices i e j. Como resultado, podemos falar na probabilidade P (ui , vj ) de
6
Note que a soma dada pela Eq. (1.48) ocorre sobre todo o intervalo a1 < u < a2 . No entanto, podemos escrever a soma acima na
forma:
∑
∆u1 /δu
∑
∆u2 /δu
P (uj ) +
j=1
∑
∆uN /δu
P (uj ) + · · · +
j=1
P (uj ) = 1.
j=1
onde subdividimos o intervalo em N intervalos de largura ∆u e os rotulamos por ∆uj , com j = 1, 2, · · · , N . Se P (uj ) é igual para todos
os subintervalos δuj , então podemos escrever as somas acima na forma:
∑
∆u1 /δu
P (u1 )
∑
∆u2 /δu
+ P (u2 )
j=1
∑
∆uN /δu
+ · · · + P (uN )
j=1
= 1.
j=1
ou ainda,
N
∑
k=1
P (uk )
∆uk
=1
δu
∴
N
∑
P(uk )∆uk = 1.
k=1
onde usamos a Eq. (1.48). Agora note que ∆ui = (a2 − a1 )/N . Assim, quando N → ∞ ∆ui → du e a soma sobre os valores inteiros se
transforma em uma integral de a1 até a2 . Assim, temos:
N
∑
k=1
que o resultado final para o limite contínuo.
P(uk )∆uk = 1
N →∞
∫
a2
−−−−→
P(u) du = 1.
a1
CAPÍTULO 1. INTRODUÇÃO AOS MÉTODOS ESTATÍSTICOS
34
encontrar simultâneamente u = ui e v = vj . De maneira análoga, escrevemos esta probabilidade na forma:
P(u, v) du dv = P (u, v)
du dv
δu δv
onde o fator multiplicando P (u, v) é simplesmente o número de células infinitesimais de tamanho δuδv contidas
no intervalo delimitado por u e u + du e v e v + dv. A condição de normalização dada pela Eq. (1.40) é escrita na
Figura 1.4: Generalização do caso unidimensional. Aqui o espaço definido pelas variáveis u e v é particionado em unidades
de δu e δv.
forma:
∫
a2 ∫ b2
P(u, v) du dv = 1.
a1
(1.50)
b1
O valor médio de uma função F (u, v) também pode ser definido usando a densidade de probabilidade de modo
que a Eq. (1.44) se torna:
∫
a2 ∫ b2
F (u, v) =
F (u, v)P(u, v) du dv.
a1
(1.51)
b1
Logicamente que todas as propriedades relacionadas com o cálculo de valores médios permanecem válidas
uma vez que as duas formulações são equivalentes.
1.5. DISCUSSÃO GERAL DO PROBLEMA DA CAMINHADA ALEATÓRIA
35
Funções de Variáveis Aleatórias
Aqui consideramos um caso geral que será recorrente na análise de problemas físicos do ponto de vista estatístico.
Seja uma única variável u e suponha que φ(u) seja alguma função contínua de u. Se P(u) du é a probabilidade de
encontrar u no intervalo delimitado por u e u + du, qual é densidade de probabilidade W (φ) dφ correspondente
de encontrar φ no intervalo entre φ e φ + dφ? Isto é feito somando-se todas as probabilidades para as quais u
assume valores em que φ fique dentro intervalo dφ; em símbolos:
∫
W (φ) dφ =
P(u) du
dφ
onde a integral é realizada no intervalo de u e u + du. Assim, podemos escrever a integral acima na forma:
∫
φ+dφ
W (φ) dφ =
P(u)
φ
du
dφ
dφ
(1.52)
onde o módulo é usado afim de garantir que o lado esquerdo da equação tenha apenas valores positivos. Agora,
desde que dφ é pequeno, a integral acima se reduz a
W (φ) dφ = P(u)
du
(φ + dφ − φ)
dφ
W (φ) dφ = P(u)
du
dφ.
dφ
(1.53)
Os passos tomados da Eq. (1.52) até a Eq. (1.53) consideram que φ é uma função unívoca de u, i.e., temos
um único valor de u para cada valor de φ. Nem sempre isto é válido, conforme ilustrado na Fig. 1.5 onde temos
dois valores diferentes de u para o mesmo valor de φ. Nestes casos temos que considerar todas as contribuições
no cálculo da probabilidade W (φ) dφ que entram no intervalo de interesse.
Quando temos uma função de várias variáveis, os argumentos usados aqui podem ser generalizados para estes
casos conforme estudaremos futuramente.
Exemplo
1. (Reif., pg. 31) Suponha que um vetor B bi-dimensional de comprimento constante B = |B| é equiprovável de
ser encontrado em qualquer direção especificada pelo ângulo θ entre o vetor e o eixo vertical y. A probabilidade
P(θ) dθ que este ângulo fique entre θ e θ + dθ é então dada pela razão entre o intervalo angular dθ pelo intervalo
total 2π subtendido pelo círculo, assim:
P(θ) dθ =
dθ
.
2π
CAPÍTULO 1. INTRODUÇÃO AOS MÉTODOS ESTATÍSTICOS
36
Figura 1.5: Exemplo de uma função biunívoca. Neste caso temos dois intervalos de u em que se tem o mesmo valor da função
φ(u). Neste caso é necessário atenção no cálculo da distribuição de probabilidades aplicando a Eq. (1.53) em intervalos
separados onde a função apresenta caráter unívoco.
Se o vetor faz um ângulo θ com o eixo x, a componente x do campo magnético Bx pode ser escrita como:
Bx = B cos θ.
Qual é a probabilidade W (Bx ) dBx de encontrar a componente Bx do vetor no intervalo entre Bx e Bx +
dBx ?
Solução
Para resolver este problema, primeiro deve-se notar se a função Bx (θ) unívoca. Desde que para 0 < θ < 2π e
−B < Bx < +B vemos que não é caso pois existem dois valores de θ que permitem o mesmo valor da componente
Bx . Assim, uma alternativa seria subdividir o intervalo de 0 a π e o outro de π a 2π. Desde que as probabilidades
se somam e sempre são positivas, os dois trechos de θ fornecem o mesmo valor. Assim, basta fazer o cálculo para
um dos trechos e multiplicar o resultado por 2. Nos trechos especificados, a função é unívoca e podemos aplicar a
Eq. (1.53), assim, escrevemos:
W (Bx ) dBx = 2 × P(θ)
dθ
dBx
dBx
1.5. DISCUSSÃO GERAL DO PROBLEMA DA CAMINHADA ALEATÓRIA
37
onde o fator 2 vem do fato da função não ser unívoca de 0 a 2π. Precisamos determinar a derivada de θ(Bx ). Para
isso, temos duas alternativas. Primeiramente, invertemos Bx (θ). Assim, temos:
[
θ(Bx ) = arccos
Bx
B
]
e tomando a derivada, obtemos ainda:
[
[
]
]
dθ(Bx )
d
Bx
1
d
Bx
1
1
1
=
arccos
=
arccos
=− √
= −√ 2
dBx
dBx
B
B d(Bx /B)
B
B
B − Bx2
Bx2
1− 2
B
e substituindo-se na distribuição de probabilidades, segue que:
W (Bx ) dBx = 2
1
1
dBx
√
dBx = √ 2
.
2
2
2π B − Bx
π B − Bx2
Podemos também escrever a expressão genérica na seguinte forma:
W (Bx ) dBx = 2 × P(θ)
1
dBx
dBx
dθ
e substituindo a expressão para Bx dada no enunciado, ficamos com:
W (Bx ) dBx = 2 × P(θ)
e como sin θ =
√
1
dBx
B sin θ
B 2 − Bx2 /B, segue que:
dBx
W (Bx ) dBx = 2 × P(θ) √ 2
B − Bx2
que é o mesmo resultado que vamos obter acima a substituição do valor da densidade de probabilidade. Assim,
escrevemos a resposta final como:
dBx
W (Bx ) dBx = √ 2
,
π B − Bx2
= 0,
−B ≤ Bx ≤ +B
p/ B fora do intervalo.
Vemos então que a probabilidade é maxima quando B tem o valor máximo B = Bx e é zero quando Bx =
0. Além disso, note que a densidade de probabilidade apresenta um infinito quando Bx → B. Isto não é um
problema desde que P não é a probabilidade e sim sua densidade. Após a integração desta função devemos ter
uma probabilidade que deve ser finita.
CAPÍTULO 1. INTRODUÇÃO AOS MÉTODOS ESTATÍSTICOS
38
1.5.3
Cálculo geral dos valores médios para a caminhada aleatória
Usando as considerações que fizemos nas últimas seções, vamos reconsiderar o problema da caminhada aleatória
no caso unidimensional. Seja si o deslocamento (positivo ou negativo) do i-ésimo passo. Então denotamos por
w(si ) dsi a probabilidade do i-ésimo deslocamento estar no intervalo entre si e si + dsi .
É assumido que esta probabilidade é independente de quais deslocamentos ocorrem em outros passos. Por
simplicidade, consideramos ainda que a distribuição de probabilidade w é a mesma para todos os passos. No
entanto, é importante notar que a situação aqui é mais geral do que no caso inicial pois agora estamos considerando
que a magnitude de cada passo é variável, sendo determinada pela distribuição w(s).
O interesse neste problema é determinar o deslocamento x após um total de N passos. Isto equivale a perguntar
pela probabilidade P(x) dx do deslocamento estar situado entre x e x + dx. Podemos determinar também os valores médios (momentos) de x. A seguir, mostramos como determinar estes valores médios sem um conhecimento
prévio da distribuição P(x).
O deslocamento x total é dado pela soma:
x = s1 + s2 + s3 + · · · + sN =
N
∑
si
(1.54)
i=1
e tomando a média, obtemos:
x̄ =
N
∑
s̄i .
(1.55)
i=1
Agora note que o valor médio para um dado si é dado por:
∫
s̄i =
wi (s)s ds
onde omitimos o índice i na variável de integração desde que é uma variável muda. Agora, desde que a distribuição
é a mesma para todos os passos, então, estamos querendo dizer que wi (s) = w(s), assim, segue que todos os valores
médios são os mesmos, i.e.,
∫
s̄i =
w(s)s ds = s̄
assim, podemos escrever o deslocamento médio x, dado pela Eq. (1.55), na forma:
x̄ = N s̄.
(1.56)
(∆x)2 = (x − x̄)2 .
(1.57)
A dispersão é dada por:
1.5. DISCUSSÃO GERAL DO PROBLEMA DA CAMINHADA ALEATÓRIA
39
Usando as Eqs. (1.54) e (1.55), podemos escrever
x − x̄ =
∑
(si − s̄i )
∴
∆x =
i
N
∑
∆si
i=1
e tomando o quadrado da equação acima, obtemos:
(
(∆x)2 =
N
∑
)
∆si
i=1
N
∑
∆sj =
∑
∑
i
i,j
i̸=j
(∆si )2 +
j=1
(∆si )(∆sj )
e tomando a média, segue que:
(∆x)2 =
∑
(∆si )2 +
i
∑
(∆si )(∆sj )
i,j
i̸=j
Para resolver a soma para i ̸= j, fazemos a hipótese de que os passos são estatisticamente independentes. Neste
caso, a média pode ser fatorada na forma de um produto, i.e.,
(∆si )(∆sj ) = (∆si ) (∆sj ) = 0
desde que
∆si = s̄i − s̄ = 0.
Desde que os termos cruzados desaparecem na média, a dispersão se reduz a
(∆x)2 =
N
∑
(∆si )2
i=1
e desde que a distribuição de passos é a mesma para todo i, então, a dispersão será independente do índice i da
mesma forma que fizemos no cálculo da média. Neste caso, escrevemos diretamente
(∆x)2 = N (∆s)2
(1.58)
onde (∆s)2 é a dispersão do deslocamento por passo dada por:
(∆si )2 = (∆s)2 ≡
∫
ds w(s)(∆s)2 .
(1.59)
Apesar da simplicidade, as Eqs. (1.56) e (1.58) são gerais e importantes. A dispersão, como já foi mencionado
anteriormente, é uma medida do quadrado da largura da distribuição do deslocamento líquido em torno do valor
médio x̄. O desvio é definido pela raíz quadrada da dispersão ∆∗ x ≡ [(∆x)2 ]1/2 . Os resultados obtidos acima,
permite tirar conclusões gerais sobre a soma de variáveis estatisticamente independentes. Se a média s̄ ̸= 0 e
o número de passos N aumenta, nota-se que a média cresce proporcionalmente a N . A largura da distribuição
CAPÍTULO 1. INTRODUÇÃO AOS MÉTODOS ESTATÍSTICOS
40
também aumenta, porém proporcionalmente a N 1/2 . Desta forma, a largura relativa definida pela razão do desvio
pelo valor médio, i.e., ∆∗ x/x̄, diminui com N −1/2 ; explicitamente, escrevemos:
∆∗ x ∆∗ s 1
√ .
=
x̄
s̄
N
A relação acima indica que o desvio percentual dos valores de x em torno da média x̄ se torna cada vez mais
desprezível a medida que N se torna grande.
Exemplo
1. (Reif., Prob. 1.5, pg. 41) No jogo de roleta Russa (não recomendado pelo autor), alguém insere um único
cartucho no tambor de um revólver, deixando as outras cinco câmaras do tambor vazias. Alguém então gira o
tambor, aponta para a cabeça de alguém e puxa o gatilho.
(a) Qual é a probabilidade de estar vivo após puxar o gatilho N vezes?
(b) Qual é a probabilidade de sobreviver (N − 1) vezes e então levar o tiro na N -ésima vez que alguém puxa o
gatilho?
(c) Qual é o número médio de vezes que um jogador tem a oportunidade de puxar o gatilho neste jogo macabro?
Solução
Seja então a probabilidade p da pessoa permanecer viva e q a probabilidade da pessoa ser morta. Desde que
temos apenas uma bala em um tambor que comporta seis balas, então, temos que:
p=
5
6
e
1
q = 1−p = .
6
Note que podemos estabelecer um paralelo com o problema da caminhada aleatória considerando que o número
de passos para a direita é igual ao número de vezes que a pessoa permanece viva. Com estas informações estamos
aptos a resolver os itens solicitados no problema.
(a)
Neste caso, temos o produto de N termos correspondendo à probabilidade p de sobreviver:
N
p =
(b)
( )N
5
6
1.5. DISCUSSÃO GERAL DO PROBLEMA DA CAMINHADA ALEATÓRIA
41
Neste caso temos um produto de N − 1 fatores p, para a probabilidade de N − 1 vezes sem levar o tiro, pela
probabilidade de levar o tiro, i.e.,
p
N −1
( )N −1
q=
5
6
1
.
6
(c)
Consideramos que o jogador puxa o gatilho n vezes e então é morto na última vez. Neste caso, teríamos a
seguinte distribuição:
P (N ) = pN −1 q
onde p = 5/6 e q = 1/6.
O número médio N de vezes é dado por:
∞
∑
∂
N̄ =
Np q =
∂p
N =1
(
N
∞
∑
)
p
N
q
N =1
mas como p < 1 e q não depende de q, pois consideremos as probabilidades p e q estatisticamente independentes,
então podemos escrever:
∞
∑
pN =
N =1
p
1−p
e substituindo este resultado, segue que:
N̄ =
∞
∑
N pN q =
N =1
∂
∂p
(
)
p
q
1−p
e como devemos ter p + q = 1, podemos escrever ainda
N̄ =
q
(1 − p)2
e substituindo-se os valores, obtemos:
1
36
N̄ = ( 6 )2 =
6
5
1−
6
∴
N̄ = 6.
2. (Reif., Prob. 1.19, pg. 45) Uma bateria de força eletromotriz (f.e.m) total V está conectada a um resistor R;
como resultado, uma quantidade de potência P = V 2 /R é dissipada no resistor. A bateria consiste de N células
individuais conectadas em série de modo que V é dada pela soma da f.e.m’s de todas as células. A bateria, no
entanto, é velha de modo que nem todas as células estão em perfeito estado. Portanto, o que podemos dizer é que
existe uma probabilidade p que a fem de qualquer célula individual tenha seu valor normal v; e uma probabilidade
CAPÍTULO 1. INTRODUÇÃO AOS MÉTODOS ESTATÍSTICOS
42
q = 1 − p que a fem de qualquer célula individual seja zero porque a célula foi curto-circuitada internamente. As
células individuais são estatisticamente independentes uma da outra. Sob estas condições, calcule a potência
média P̄ dissipada no resistor, expressando o resultado em termos de N , v e p.
Solução
Notamos que a força eletromotriz total que pode ser fornecida pela bateria é V , de modo que este valor
será V = N v no caso em que todas as células estivessem em perfeito estado. No entanto, como este não é o
caso, precisamos determinar o valor real fornecido pela bateria. Notamos também que a potência média pode ser
determinada tomando a média do quadrado do potencial, i.e.,
P̄ =
V2
R
e nos resta determinar a média do quadrado do potencial. Para isso, precisamos da distribuição de probabilidades.
Para isso, notamos que este problema é completamente análogo ao problema da caminhada aleatória. Os possíveis
valores de V são aqueles envolvendo todas as combinações diferentes de células em perfeito estado e células
danificadas. Isso se deve ao fato das células estarem conectadas em série de modo que o potencial total é dado pela
soma dos potenciais oriundos das células boas. Assim, como temos o mesmo problema da caminhada aleatória,
podemos usar a distribuição binomial para obter o valor médio de V . Para isso, notamos que o potencial V é dado
por
V = vn1
tal que V = N v quando n1 = N , ou seja, quando todas as células estão em perfeito estado. Note que n1 é no de
células boas. Tomando o quadrado e fazendo a média, segue que:
V 2 = v 2 n21 .
O valor de n21 já foi determinado para a distribuição binomial. Na página 19, obtivemos o seguinte resultado:
n21 = n̄21 + N pq
como também já mostramos que n̄1 = N p, segue que:
[
n21
2
2 2
= (N p) + N pq = N p
(1 − p)
1+
Np
E , portanto, o valor médio de V 2 será:
[
2
2
2 2
V =v N p
(1 − p)
1+
Np
]
]
1.5. DISCUSSÃO GERAL DO PROBLEMA DA CAMINHADA ALEATÓRIA
43
e a potência média é dada por:
[
v2
(1 − p)
P̄ = N 2 p2 1 +
R
Np
]
que é o resultado procurado. Note que quando todas as células estão em perfeito estado, p = 1 e então a potência
fica reduzida a
P̄ ′ =
v2 2 V 2
N =
R
R
que seria o potência máxima total obtido pela bateria em perfeito estado.
3. (Reif., Prob. 1.9, pg. 41) A probabilidade W (n) que um evento caracterizado por uma probabilidade p
ocorrendo n vezes em N tentativas foi mostrado ser dada pela distribuição binomial
W (n) =
N!
pn (1 − p)N −n .
n!(N − n)!
(1.60)
Considere uma situação onde a probabilidade p é pequena (p ≪ 1) e onde alguém está no caso n ≪ N . (Note
que se N é grande, W (n) se torna muito pequeno se n → N porque o fator pn é fortemente reduzido quando
p ≪ 1. Então, W (n) é realmente somente apreciável quando n ≪ N .) Várias aproximações podem ser feitas
para reduzir a Eq. (1.60) para uma forma mais simples.
(a) Usando o resultado ln(1 − p) ≈ −p, mostre que (1 − p)N −n ≈ e−N p
(b) Mostre que N !/(N − n)! ≈ N n
(c) Mostre então que a Eq. (1.60) se reduz
W (n) =
λn −λ
e
n!
onde λ = N p é o número médio de eventos. A distribuição é chamada distribuição de Poisson.
Solução
(a)
Devemos mostrar que (1 − p)N −n ≈ e−N p dado que ln(1 − p) ≈ −p. Seja a variável auxiliar
x = (1 − p)N −n
(1.61)
CAPÍTULO 1. INTRODUÇÃO AOS MÉTODOS ESTATÍSTICOS
44
e tomando o logaritmo em ambos os membros, segue que:
[
]
ln x = ln (1 − p)N −n = (N − n) ln(1 − p) ≈ (N − n)(−p)
de onde obtemos:
x ≈ e−(N −n)p
e como estamos considerando que N ≫ n, então temos ainda
x ≈ e−N p
e substituindo o valor de x que definimos acima chegamos à igualdade procurada:
(1 − p)N −n ≈ e−N p .
(b)
Temos que
N!
N (N − 1)(N − 2) · · · [N − n + 1](N − n)!
=
(N − n)!
(N − n)!
= N (N − 1)(N − 2) · · · [N − n + 1]
= (N − 0)(N − 1)(N − 2) · · · [N − n + 1]
e notamos que temos n termos e como N ≫ n e como n > n − 1 > n − 2 > · · · 3 > 2 > 1, então podemos escrever:
N!
≈ N.N.N.N.N.N.N.N
· · · N} = N n .
{z
(N − n)! |
n termos
(c)
Agora resta substituir as expressões dos itens anteriores na Eq. (1.60). Para isso, temos que:
W (n) =
N!
1
N!
pn (1 − p)N −n =
pn (1 − p)N −n
n!(N − n)!
n! (N − n)!
W (n) ≈
1 n n −N p
N p e
n!
W (n) =
λn −λ
e
n!
1.5. DISCUSSÃO GERAL DO PROBLEMA DA CAMINHADA ALEATÓRIA
45
que é a distribuição de Poisson. Note que usamos λ = N p.
3. (Reif., Prob. 1.11, pg. 42) Assuma que os erros tipográficos cometidos em uma máquina de escrever
ocorrem de maneira completamente aleatória. Suponha que um livro de 600 páginas contém 600 erros. Use a
distribuição de Poisson para calcular a probabilidade
(a) que uma página não contenha erros
(b) que uma página contenha ao menos três erros
Solução
A distribuição de probabilidade é dada pela distribuição de Poisson, assim temos que
W (n) =
1n −λ
e
n!
Temos um erro por página, assim p = 1/600 e λ = N p = 600/600 = 1. Logo,
W (n) =
1n −1 e−1
e =
n!
n!
(a)
A probabilidade de não haver erros é obtida fazendo-se n = 0 na distribuição, assim, obtemos:
W (0) =
1 −1
e = 0, 37.
0!
(b)
Aqui a probabilidade é dada pela soma sobre todos os n’s partindo de 3. No entanto, é mais fácil subtrair de 1
as possibilidades de se obter n = 0, 1 e 2. Assim, escrevemos:
p = 1−
2
∑
e−1
n=0
na seção 1.5.3
n!
= 0, 08.
46
CAPÍTULO 1. INTRODUÇÃO AOS MÉTODOS ESTATÍSTICOS
Capítulo 2
Descrição Estatística de um Sistema de
Partículas
Após o estudo dos conceitos básicos de probabilidade, podemos prosseguir e aplicar estes conceitos na descrição
física de um sistema de muitas partículas. Neste sentido, temos como objetivo combinar a teoria de probabilidade
com os conceitos de Mecânica. Para fazer progresso na formulação estatística de um sistema de muitas partículas,
considere um experimento simples em que alguém lança dez dados de dentro de um copo em uma mesa. Para
analisar este experimento simples, precisamos especificar o estado do sistema, i.e., precisamos definir algo que
permita descrever com precisão o resultado do experimento. Neste caso, o resultado é especificado dizendo quais
são as faces dos 10 dados que ficaram para cima. Agora, note que se pudéssemos determinar todas as condições
iniciais em que os dados são lançados, ou seja, dizer as posições e velocidades dos dados no momento do lançamento e como o copo foi manipulado poderíamos, usando as leis da Mecânica Clássica, determinar qual é o
resultado do experimento. No entanto, como não temos estas informações, precisamos lançar mão da teoria de
probabilidades. Com isso, queremos dizer que não consideramos apenas um experimento em que alguém lança
os 10 dados, mas pensamos em uma coleção de experimentos preparados de maneira idêntica, chamado ensemble
estatístico, e perguntamos pela probabilidade de ocorrência de um resultado particular, i.e., qual é fração dos experimentos caracterizada por um resultado particular. Portanto, o segundo ingrediente para a descrição de um sistema
de muitas partículas é o chamado ensemble estatístico. Isto também nos dá uma idéia de como as probabilidades
podem ser medidas experimentalmente: basta repetir um experimento nas mesmas condições e determinar a fração
de experimentos que retornam um resultado particular.
Para trabalhar com um sistema de muitas partículas e aplicar os conceitos de probabilidade, precisamos de
um postulado sobre as probabilidades. No caso do experimento que estamos considerando, se consideramos que
47
CAPÍTULO 2. DESCRIÇÃO ESTATÍSTICA DE UM SISTEMA DE PARTÍCULAS
48
os dados têm densidade de massa uniforme e as faces iguais, não existe nada nas leis da Mecânica que nos leve
a pensar que uma determinada face caia virada para cima com probabilidade maior do que qualquer outra face.
Então podemos postular que a priori1 todas as faces têm a mesma probabilidade de caírem viradas para cima. O
postulado é razoável e não apresenta nenhum conflito com as leis da Mecânica. Este é o chamado postulado de
iguais probabilidades a priori. É importante notar que, como qualquer postulado, é necessário que seja verificado
experimentalmente através da aplicação do mesmo na descrição teórica dos experimentos e os resultados previstos
comparados com os obtidos experimentalmente. Finalmente, de posse da descrição de estados no ensemble e do
postulado de iguais probabilidades, podemos fazer o cálculo de probabilidades a partir da teoria desenvolvida no
capítulo anterior.
2.1
Formulação Estatística do Problema Mecânico
A seguir, discutimos como os conceitos mencionados na introdução prévia são aplicados na descrição de problemas
de Mecânica.
2.1.1
Especificação dos Estados do Sistema
Para qualquer sistema de partículas, não importa o quão complicado, a sua descrição é realizada através de uma
função de onda ψ(q1 , q2 · · · , qf ) a qual é uma função de f coordenadas (incluindo spin). O número f é chamado de
número de graus de liberdade do sistema. Um estado do sistema é definido através dos f números quânticos. A
descrição é completa uma vez que conhecemos ψ(q1 , q2 · · · , qf ) em um dado instante pois a função de onda pode
ser determinada em outros instantes de tempo através da equação de Schrödinger.
Descrição Clássica
Eventualmente, podemos estudar uma situação usando uma descrição clássica. Considere, por exemplo, uma
partícula clássica em movimento unidimensional. Podemos dar uma descrição completa do movimento através do
conhecimento de sua coordenada q e momento p. As leis de Newton permitem determinar p e q em um momento
posterior. Geometricamente, podemos representar os valores possíveis de p e q através do chamado espaço de fase
que nada mais é do que um espaço definido pelos eixos p e q, conforme ilustrado na Fig. 2.1. A descrição é feita
especificando um ponto no espaço de fase. À medida que a partícula se movimenta, esta descreve uma trajetória
neste espaço. Para permitir uma descrição em termos de estados, subdividimos o espaço de fase em células de
1
do latim, significa “em princípio".
2.1. FORMULAÇÃO ESTATÍSTICA DO PROBLEMA MECÂNICO
49
Figura 2.1: Diagrama mostrando o espaço de fase para uma partícula em um movimento unidimensional. Ao lado direito
temos o particionamento do espaço de fase em células de dimensões δpδq = h0 de modo que a descrição clássica implica
em determinar a probabilidade de encontrar a partícula com momento entre p e p + δp e q e q + δq.
volume2 dado por
δp δq = h0 .
Com este particionamento, o estado é então especificado dizendo que suas coordenadas estão em algum intervalo entre q e q + dq e p e p + dp. Aqui, novamente, consideramos que as diferenciais dp e dq são muito maiores
do que as divisões δp e δq. A especificação se torna mais precisa a medida que os elementos de volume se tornam
cada vez menores3 .
É claro que este princípio pode ser generalizado para o caso de um número N arbitrário de partículas com
f graus de liberdade. Tal sistema pode ser descrito por f coordenadas q1 , q2 , · · · qf e f correspondentes momentos p1 , p2 , · · · , pf , i.e., por um total de 2f parâmetros. O número das f coordenadas independentes necessárias
para descrever o sistema é chamado de número de graus de liberdade. No caso de N partículas, temos então
3N graus de liberdade, desde que temos três coordenadas para cada partícula. Assim, o conjunto de números
{q1 , q2 , · · · qf , p1 , p2 , · · · pf } pode ser novamente considerado como um ponto no “espaço de fase" de 2f dimensões
no qual cada eixo cartesiano é rotulado por uma de suas coordenadas ou momentos. Novamente, consideramos
que o espaço de fase 2f -dimensional pode ser subdividido pequenas células de volume δq1 · · · δqf δp1 · · · δpf = hf0 .
Com isso, o estado do sistema pode ser especificado fornecendo a probabilidade das coordenadas estarem dentro
de um determinado elemento do volume deste espaço.
Assim, o estado microscópico pode ser especificado enumerando-se os possíveis estados quânticos descritos
2
no caso de um espaço de fase 2D o volume do espaço de fase é uma área.
3
De acordo com a Mecânica Quântica, existe um limite para o tamanho da célula dado pelo constante de Planck. Este limite vem do
princípio da incerteza de Heisenberg que diz que δpδq ≥ h.
CAPÍTULO 2. DESCRIÇÃO ESTATÍSTICA DE UM SISTEMA DE PARTÍCULAS
50
pela função de onda ψ. Por exemplo, no caso de um elétron no átomo de hidrogênio, descrito pela função de
onda ψ(r, θ, φ), seus estados possíveis são rotulados pelo conjunto de números quânticos n, l, ml e ms . No caso
de uma descrição clássica, podemos rotular todas as células do espaço de fase por um índice (r = 0, 1, 2, · · · ) e
especificando-se a célula particular r. Desta forma, vemos que ambas as descrições são equivalentes de maneira
que os estados quânticos são análogos às células do espaço de fase clássico.
2.1.2
Ensemble Estatístico
Como mostramos no exemplo dos 10 dados lançados de dentro de um copo, poderíamos prever os resultados se
fosse possível conhecer todos os detalhes do movimento dos dados. No entanto, como isto não é possível, tudo o
que pode ser feito é uma análise probabilística resultante da falta de conhecimento sobre o sistema. No caso da
descrição de um sistema de muitas partículas, temos um problema de natureza completamente determinística, no
sentido de que a especificação da função de onda do sistema em um determinado instante de tempo nos habilita
determinar a função de tempo em todos os tempos (a mesma situação se verifica no caso da descrição clássica
onde se especifica as coordenadas p e q em um dado instante de tempo). No entanto, de maneira análoga ao
exemplo do experimento dos dados, nunca temos informação completa sobre o sistema de muitas partículas e,
assim, não é possível fazer uma descrição completamente precisa do mesmo. Como resultado, partimos para
uma descrição probabilística, onde não consideramos apenas um único sistema, mas um ensemble de sistemas
submetidos às mesmas condições externas. Os sistemas neste ensemble, em geral, estarão em diferentes estados
quânticos sendo caracterizados por diferentes variáveis macroscópicas. Neste caso, perguntamos pela fração de
sistemas caracterizados por um estado específico.
Com isso, nosso objetivo é determinar a probabilidade de encontrar um dado estado quântico no ensemble
usando-se alguns postulados básicos da teoria de probabilidades. Tudo o que podemos dizer é que o sistema
pode estar em algum conjunto de estados compatíveis com as informações que dispomos sobre o mesmo. A este
conjunto de estados, damos o nome de “estados acessíveis ao sistema". Com isso, percebemos que o ensemble
representativo contém somente estados consistentes com o conhecimento disponível sobre o sistema, assim, os
sistemas que compõem o ensemble devem estar distribuídos sobre os vários estados acessíveis.
Para esclarecer a noção de estados acessíveis, na tabela 2.1 são representados todos os estados possíveis para
um sistema composto pot três partículas de spin 1/2 submetidos a um campo magnético externo H. Neste caso, os
possíveis momentos magnéticos são denotados por ±µ. As energias magnéticas por partícula são ±µH e, portanto,
temos dois estados possíveis caracterizados por estes valores de energia. No caso de um sistema de três partículas
com spin 1/2 temos 23 = 8 estados possíveis do sistema. Rotulamos estes estados por um índice r = 1, 2, · · · , 8,
2.1. FORMULAÇÃO ESTATÍSTICA DO PROBLEMA MECÂNICO
51
mostrados na primeira coluna. Na segunda coluna, são apresentados os possíveis estados das três partículas onde
os sinais + e − denotam os estados com momento magnético paralelo e anti-paralelo ao campo aplicado H. Na
última coluna, são especificados os valores de energia para os 8 estados possíveis para este sistema. Assim, se
temos o conhecimento de sua energia total, podemos especificar os possíveis estados correspondentes a este valor
de energia (que são os estados acessíveis). Por exemplo, se dizemos que a energia total do sistema é +µH, então
sabemos que os estados acessíveis ao sistema são os estados para r = 5, 6, 7. Note, porém, que não sabemos ao
certo em qual destes estados o sistema se encontra. Tudo o que podemos dizer é que o sistema pode ser encontrado
em qualquer um dos três estados acessíveis, rotulados por 5, 6 e 7.
Índice do estado r
Números Quânticos m1 , m2 e m3
Momento Magnético Total
Energia Total
1
+++
3µ
−3µH
2
++−
µ
−µH
3
+−+
µ
−µH
4
−++
µ
−µH
5
+−−
−µ
µH
6
−+−
−µ
µH
7
−−+
−µ
µH
8
−−−
−3µ
3µH
Tabela 2.1: Tabela mostrando os possíveis estados quânticos de um sistema de três partículas de spin 1/2 submetidas a um
campo magnético externo. Note que cada partícula pode ser encontrada em dois estados rotulados por + e −.
2.1.3
Postulados Básicos da Física Estatística
Com o objetivo de progredir na descrição estatística de processos físicos, precisamos recorrer a um postulado
fundamental sobre o cálculo das probabilidades de encontrar o sistema em algum de seus estados acessíveis. Para
isso, faremos duas suposições sobre as condições do sistema sob consideração: supomos que o sistema é isolado e
encontra-se em equilíbrio. A seguir, vamos definir o que significam estas condições.
Um sistema é dito isolado se este não pode trocar energia com suas vizinhanças. Neste caso, a Mecânica
nos diz que a energia do sistema é conservada. Com isso, estamos aptos a caracterizar o sistema por seu valor
de energia e os estados acessíveis ao sistema são aqueles que correspondem a este valor fixo de energia. Neste
CAPÍTULO 2. DESCRIÇÃO ESTATÍSTICA DE UM SISTEMA DE PARTÍCULAS
52
caso, como em geral temos muitos estados acessíveis para um dado valor de energia, como podemos determinar
as probabilidades de encontrar o sistema em qualquer um destes valores de energia? Neste ponto é que entra a
necessidade de supor que o sistema encontra-se em equilíbrio. O estado de equilíbrio é definido como aquele em
que as probabilidades de encontrar o sistema em qualquer estado não variam no tempo. Como conseqüência, as
variáveis macroscópicas como pressão, temperatura, volume, magnetização, etc., são também independentes do
tempo.
Quando o sistema está isolado e em equilíbrio, temos que o sistema está distribuído em um conjunto de estados
acessíveis consistentes com um dado valor de energia total. Desde que todos os estados são consistentes com o
valor de energia prescrito, não há nada nas leis da Mecânica que permitam afirmar que alguns dos estados acessíveis
são mais prováveis do que outros. Por esta razão, fazemos o seguinte postulado:
Um sistema isolado e em equilíbrio é equiprovável de ser encontrado em qualquer
um de seus estados acessíveis.
O postulado acima, da mesma forma que no experimento do 10 dados citado no início do capítulo, deve ser
verificado experimentalmente. É importante notar que se alguém considera um ensemble de sistemas isolados
em equilíbrio, distribuídos uniformemente sobre seus estados acessíveis em um dado instante de tempo, eles irão
permanecer distribuídos desta forma em qualquer instante de tempo posterior. Este fato é uma conseqüência do
chamado Teorema de Liouville. Uma prova deste teorema é dada no apêndice A-13 do Reif.
No caso do exemplo ilustrado na Tabela 2.1, se especificamos que a energia do sistema é por exemplo igual a
+µH então o sistema estará uniformemente distribuído entre os estados
(+ + −), (+ − +), (− + +)
(2.1)
de modo que é equiprovável do sistema ser encontrado em qualquer um dos três estados acima. Note que a
especificação da probabilidade é dada em termos do estado como um todo, i.e., de existirem dois spin apontando
na mesma direção do campo e o terceiro apontando na direção contrária. No entanto, não podemos dizer qual dos
três spins é o que está alinhado no sentido anti-paralelo ao campo.
2.1.4
Alcance do estado do equilíbrio
Considere agora que o sistema de interesse está isolado, porém, não se encontra em uma situação em que é equiprovável de ser encontrado em qualquer um de seus estados acessíveis. Neste caso, o postulado fundamental não
garante que esta situação pode ser um estado de equilíbrio. Como resultado, as probabilidades e as correspondentes variáveis macroscópicas irão evoluir no tempo até que se atinja a situação de equilíbrio caracterizada pelo
postulado fundamental.
2.1. FORMULAÇÃO ESTATÍSTICA DO PROBLEMA MECÂNICO
53
Para entender a razão do sistema evoluir no tempo até que se atinja o estado de equilíbrio, é necessário discutir
a natureza dos estados acessíveis que temos definido. Estes estados não são os estados quânticos exatos de um
sistema perfeitamente isolado e com todas as interações levadas em consideração. Com efeito, é impossível obter
tal descrição porque não temos a informação completa sobre o sistema de muitas partículas e nem temos o interesse
em tal descrição dentro de uma aproximação probabilística. Neste caso, consideramos apenas estados quânticos
aproximados, baseados em algum modelo que leve em consideração o conhecimento disponível que temos sobre
o sistema. Desta forma, quando o sistema é conhecido de estar em algum estado específico, o sistema não irá
permanecer neste estado indefinidamente mas irá evoluir com o tempo ocupando outros estados acessíveis. Isto
ocorre devido às pequenas interações residuais entre as partículas não levadas em conta no modelo aproximado.
Suponha que um sistema está distribuído em um subconjunto de estados acessíveis em um certo tempo t. Desde
que não existem restrições sobre o sistema que o proíbe de ocupar os demais estados acessíveis, i.e., estes estados são compatíveis com a conservação da energia e demais restrições impostas ao sistema, então em um tempo
posterior o sistema irá fazer transições para estes estados devido às interações residuais entre as partículas que
compõem o sistema. Como não existe nada que torne um estado acessível preferencial, como o passar do tempo
o sistema continuará fazendo transições entre estes diversos estados. Assim, a questão a ser respondida é: qual a
probabilidade de encontrar o sistema em quaisquer destes estados após um tempo muito longo? Para responder
esta pergunta, consideramos um ensemble de sistemas identicamente preparados em um subconjunto particular
de seus estados acessíveis. Os sistemas no ensemble irão sofrer várias transições entre seus diversos estados de
maneira que após um tempo longo, o sistema pode ser encontrado em qualquer de seus estados acessíveis. Esta
situação é análoga ao problema de determinar a probabilidade de encontrar uma determinada carta em um maço
de baralho. Quando as cartas são embaralhadas por um tempo suficientemente longo, a probabilidade de encontrar
qualquer carta em cima da pilha é a mesma para todas as cartas e independente das posições iniciais das cartas. De
modo similar, no caso do ensemble de sistemas, esperamos que após um tempo suficientemente longo estes sistemas estejam distribuídos uniformemente sobre seus estados acessíveis e a probabilidade de encontrar o sistema
em qualquer estado não dependa das condições iniciais. De fato, no equilíbrio o sistemas estão completamente
randomizados de maneira que o sistema é equiprovável de ser encontrado em qualquer um de seus estados acessíveis. Estas considerações têm sido verificadas experimentalmente e também demonstradas formalmente através
da aplicação das leis da mecânica e considerações inerentes do problema de física estatística. Estas hipóteses são
conseqüência do chamado “Teorema H". Este teorema também está provado no livro do Reif, apêndice A-12.
Até o momento não fizemos nenhum comentário acerca do tempo que o sistema leva para atingir o estado do
equilíbrio. Desde que este processo depende das interações residuais não levadas em conta na descrição estatística,
o alcance do estado de equilíbrio varia de sistema para sistema. Este tempo, chamado tempo de relaxação, pode
CAPÍTULO 2. DESCRIÇÃO ESTATÍSTICA DE UM SISTEMA DE PARTÍCULAS
54
variar desde microsegundos até centenas de anos. Tudo depende da natureza das interações entre as partículas e
das taxas de transição entre os estados acessíveis. As taxas de transição são em geral muito difíceis de calcular. No
entanto, o problema da descrição dos sistemas após o sistema ter atingido o equilíbrio podem ser bastante simples
desde que podemos usar o postulado de iguais probabilidades a priori.
Para ilustrar estas considerações vamos voltar ao nosso sistema de spins da Tabela 2.1. Considere que o sistema
tem energia +µH de modo que os estados acessíveis são dados pela Eq. (2.1). Agora suponha que o sistema seja
preparado no estado + + − de modo que a probabilidade é 100% de encontrar o sistema neste estado no tempo
inicial. Com o passar do tempo, as interações entre as partículas irá fazer com que o sistema transicione para os
estados + − + e − + +. Esta interação tem origem no momento magnético das partículas que produz um pequeno
campo magnético de intensidade Hm ≪ H na posição da partícula vizinha. Com isso, a interação com este campo
pode induzir as transições entre os três estados acessíveis ao sistema. Para tempos longos em comparação com o
tempo de relaxação do sistema, o sistema se encontra em equilíbrio e é equiprovável de ser encontrado em qualquer
uma das três configurações.
2.1.5
Cálculos de Probabilidade
Seguindo o roteiro mencionado no início do capítulo, partimos para a descrição do cálculo de probabilidades para
sistemas físicos. Isso pode ser facilmente realizado quando consideramos sistemas isolados em equilíbrio. Para
exemplificar, considere um sistema cuja energia total é conhecida e está no intervalo delimitado por E e E + dE.
Para fazer alguma previsão estatística, consideramos um ensemble de sistemas cujas energias estão no mesmo
intervalo dE. Denotamos por Ω(E) o número total de estados do sistema neste intervalo de energia. Agora
considere um parâmetro qualquer y que pode assumir diversos valores denotados por yk . Este parâmetro pode
ser por exemplo, o momento magnético, pressão, volume, etc. Assim, considere que dentro do número total de
estados Ω(E) existe um certo número de estados Ω(E, yk ) para os quais o parâmetro y assume o valor yk . O
postulado então nos assegura que dentre os diversos estados Ω(E), o sistema é equiprovável de ser encontrado em
qualquer um deles pois todos estão contidos no intervalo de energia especificado. Por esta razão, a probabilidade
Pk de encontrar o sistema neste intervalo de energia de maneira que o parâmetro y assuma o valor k é dado
simplesmente por:
P (yk ) =
Ω(E, yk )
.
Ω(E)
O valor médio do parâmetro y pode ser calculado na forma:
ȳ =
∑
k
yk P (yk )
(2.2)
2.1. FORMULAÇÃO ESTATÍSTICA DO PROBLEMA MECÂNICO
55
e substituindo-se o valor da probabilidade dada pela Eq. (2.2), obtemos:
∑
ȳ =
yk Ω(E, yk )
k
Ω(E)
(2.3)
que é a média sobre os sistemas no ensemble. A soma em k é feita sobre todos os estados acessíveis para os quais
Ω(E, yk ) assume o valor yk .
Para exemplificar, vamos considerar o sistema da tabela 2.1. Digamos que a energia do sistema é µH e
perguntamos pela probabilidade de encontrar o primeira partícula com spin up. Neste caso, os estados acessíveis
são dados pela Eq. (2.1). Assim, temos dois estados em que a primeira partícula tem spin up então podemos
escrever:
Ω(−µH, +) = 2
e
Ω(−µH) = 3 (no total de estados acessíveis para E = µH).
Assim a probabilidade é dada por:
P+ =
Ω(−µH, +) 2
= .
Ω(−µH)
3
e, de maneira análoga a probabilidade de encontrar a primeira partícula com spin down é dada por:
P− =
Ω(−µH, −) 1
= .
Ω(−µH)
3
O valor médio do momento magnético da primeira partícula pode ser calculado via Eq. (2.3):
∑
µ̄ =
µk Ω(E, yk )
k
Ω(E)
µ̄ =
2.1.6
2
1
= µ −µ
3
3
µ
.
3
O comportamento da densidade de estados
Em geral, o número de estados cresce muito com o número de partículas. Por exemplo, para um sistema de partículas de spin 1/2, quando temos 3 partículas existem 8 estados possíveis. Para 4 partículas são 16 estados possíveis;
para 10 partículas temos 1024 estados e assim por diante. Vemos então que para um sistema macroscópico (um
bloco de cobre, uma piscina, etc.) o número de estados é gigantesco e o trabalho de contar estados fica muito
complicado. Desta forma, usamos a mesma estratégia que aplicamos no capítulo anterior, dividindo a escala de
energia em intervalos de tamanho δE cujo tamanho é muito maior do que o espaçamento entre os níveis de energia
CAPÍTULO 2. DESCRIÇÃO ESTATÍSTICA DE UM SISTEMA DE PARTÍCULAS
56
mas macroscopicamente é muito pequeno para tratá-lo como uma diferencial. Neste caso, iremos determinar o
número de estados Ω(E) cujos valores de energia estão situados entre E e E + δE.
Com isso, vemos que o número de estados depende da magnitude do intervalo δE o que não é desejável. No
entanto, desde que consideramos um intervalo macroscopicamente pequeno, então o número de estados deve ser
proporcional ao intervalo, assim, escrevemos:
Ω(E) = ω(E) δE
(2.4)
onde ω(E) é independente do tamanho do intervalo δE 4 . A função ω(E) é chamada de densidade de estados
e mede o número de estados por unidade de energia. Desde que todo cálculo estatístico envolve a contagem de
estados, é importante estudar como a densidade de estados depende da energia de um sistema macroscópico.
Para isso, vamos considerar um sistema macroscópico com f graus de liberdade. Neste caso, f números
quânticos são requeridos para especificar cada um de seus possíveis estados. Vamos definir E como a energia
medida em relação ao seu menor valor possível (no caso quântico em relação à energia do estado fundamental)
e vamos denotar por Φ(E) o número total de possíveis estados do sistema caracterizados por valores de energia
menores do que E. Obviamente, Φ(E) aumenta com o aumento de E. A seguir, vamos determinar o quão rápido
se dá este aumento.
Para fazer esta estimativa, começamos considerando um grau de liberdade f em particular. Seja Φ1 (ϵ) o número total de estados possíveis que podem ser assumidos pelo número quântico associado a este grau de liberdade,
quando este contribui com uma energia ϵ ou menor. Aqui novamente percebemos que Φ1 (ϵ) deve aumentar com ϵ
(note que quando ϵ tem o seu valor mais baixo Φ1 (ϵ) deve ser igual a 1). Se ϵ não é muito pequeno, podemos dizer
que Φ1 é da ordem de ϵ/∆ϵ onde ∆ϵ é o espaçamento médio entre os níveis quantizados de energia associados
com um típico grau de liberdade do sistema. Assim, podemos estimar que Φ1 (ϵ) pode ser escrito na forma
Φ1 (ϵ) ∝ ϵα
(α ≈ 1)
(2.5)
onde estamos considerando que Φ1 (ϵ) deve ser quase proporcional a ϵ desde que não temos informações detalhadas
para afirmar que Φ1 (ϵ) varia linearmente com ϵ. Vamos considerar novamente o sistema completo com f graus de
liberdade e, portanto, descrito por {s1 , s2 , · · · sf } números quânticos. Neste caso, a energia ϵ por grau de liberdade
é da ordem de:
ϵ≈
4
E
f
(2.6)
De fato, o que estamos considerando é que δE seja pequeno o suficiente para que seja possível expandir o número de estados em série
de Taylor e os termos de ordem O(δE 2 ) e superiores possam ser desprezados.
2.1. FORMULAÇÃO ESTATÍSTICA DO PROBLEMA MECÂNICO
57
e, correspondendo a este valor de energia existem Φ1 (ϵ) estados possíveis para cada grau de liberdade. Assim,
temos Φ1 (ϵ) estados possíveis para o no quântico s1 , Φ1 (ϵ) estados possíveis para s2 , etc. Então podemos estimar
o número de estados para o sistema completo como sendo da ordem
Φ(E) ≈ [Φ1 (ϵ)]f ,
ϵ=
onde
E
.
f
(2.7)
A Eq. (2.7) nos fornece o número total de estados do sistema contidos no intervalo de energia E medidos a
partir de seu estado fundamental. Assim, o número de estados contido no intervalo de energia entre E e E + δE,
será:
Ω(E) = Φ(E + δE) − Φ(E) ≈
∂Φ(E)
δE
∂E
(2.8)
e substituindo a Eq. (2.7) obtemos:
Ω(E) ≈
1 ∂[Φ1 (ϵ)]f
δE
f
∂ϵ
Ω(E) = Φf1 −1
∂Φ1
δE.
∂ϵ
(2.9)
Agora precisamos analisar a Eq. (2.9) lembrando que o número de graus de liberdade (f ) é extremamente
grande, sendo da ordem do número de Avogadro, i.e., ∼ 1024 . Para estabelecer a ordem de grandeza de Ω(E),
vamos considerar o logaritmo da Eq. (2.9):
(
ln Ω(E) = (f − 1) ln Φ1 + ln
)
∂Φ1
δE .
∂ϵ
(2.10)
e precisamos verificar qual é a contribuição de cada termo na Eq. (2.10). Considere o primeiro termo. Este é
da ordem de f desde que f ≫ 1 e o argumento do logaritmo é da ordem de ϵ se estamos considerando valores
de energia muito maiores do que o estado fundamental. O segundo termo pode ser estimado lembrando que a
derivada é da ordem de α que por sua vez é aproximadamente 1. O intervalo δE ≈ f δϵ e assim, podemos estimar
o logaritmo como sendo da ordem de ln f . Portanto, temos uma soma de um termo proporcional a f e outro
proporcional a ln f . Como f ∼ 1024 , então temos que ln f ≪ f e podemos escrever a Eq. (2.10) na forma:
ln Ω(E) ≈ f ln Φ1
(2.11)
ou seja,
ln Ω(E) ≈ O(f ),
E>0
(2.12)
CAPÍTULO 2. DESCRIÇÃO ESTATÍSTICA DE UM SISTEMA DE PARTÍCULAS
58
considerando que estamos longe da energia do estado fundamental do sistema. A Eq. (2.12) nos permite escrever
finalmente:
Ω(E) ≈ Φf1 ≈ E f
(2.13)
onde fizemos α = 1 por simplicidade . Isto é possível porque não vai afetar a estimativa de maneira significativa.
Vemos então que o número de estados acessíveis cresce rapidamente com o número de graus de liberdade do
sistema.
Gás ideal no limite clássico
Vamos aplicar as idéias desenvolvidas acima no problema de um gás ideal constituído por N moléculas idênticas
encerrado em um volume V . No caso mais geral, a energia do gás é dada por:
E = K + U + Eint
(2.14)
onde K é a energia cinética total de translação das moléculas. Se o momento do centro de massa da i-ésima
molécula é pi , então a energia cinética pode ser escrita na forma:
K = K(p1 , p2 , · · · , pN ) =
N
1 ∑
p2 .
2m i=1 i
(2.15)
A quantidade U = U (r1 , r2 , · · · , rN ) representa a energia potencial de interação mútua entre as moléculas do
gás. Esta energia depende da distância relativa entre as moléculas e, portanto, das coordenadas de seus centros de
massa denotadas por ri .
No caso em que as moléculas não são monoatômicas, os átomos de cada molécula podem também girar e
rotacionar em relação ao seu centro de massa. Sejam as coordenadas e momentos intramoleculares denotados
por Q1 , Q2 , Q3 , · · · , QM e P1 , P2 , P3 , · · · , PM . Agora, a energia interna Eint depende apenas destas coordenadas.
Notamos também que se as moléculas são monoatômicas então Eint = 0.
Um caso particularmente simples é aquele onde a energia de interação mútua entre as moléculas é desprezivelmente pequena. Então U ≈ 0 e as moléculas são ditas formar um “gás ideal". Esta situação é implementada
fisicamente no limite em que a concentração de moléculas N/V → 0 de modo que o gás está tão rarefeito que a
distância entre as moléculas é grande o suficiente para desprezar os efeitos de interação.
No caso de um gás ideal, qual seria o número de estados acessíveis Ω(E)? Por simplicidade, vamos considerar
a situação no limite clássico, i.e., quando a energia do gás é alta o suficiente para que os números quânticos que
descrevem os estados sejam grandes. Neste caso, a descrição clássica é razoável e podemos representar os estados
2.1. FORMULAÇÃO ESTATÍSTICA DO PROBLEMA MECÂNICO
59
do gás no espaço de fase. O número de estados é então proporcional ao volume compreendido pelas superfícies E
e E + δE no espaço de fase. Este volume define o valor de Ω(E) e pode ser escrito na forma
Ω(E) ≈
∫
E+δE
E
···
∫
d r1 · · ·
∫
∫
3
3
d rN
d p1 · · ·
∫
∫
3
3
d pN
dQ1 · · ·
∫
∫
dQN
dP1 · · ·
∫
dPN
(2.16)
onde usamos a notação abreviada
d3 ri = dxi dyi dzi
d3 pi = dpix dpiy dpiz .
A Eq. (2.16) permite determinar o número de estados para energias entre E e E + δE. Note que constitui em
uma soma sobre todas as coordenadas e momentos para os quais o valor de energia total está dentro do intervalo
considerado. Desde que a energia potencial é nula para um gás ideal, então a energia total é independente das
coordenadas do centro de massa. Lembrando que a energia de interação é a única contribuição que depende
da distância entre as moléculas. Assim, podemos efetuar as integrais em ri imediatamente. Considerando que
∫
d3 ri = V , então como temos N integrais, podemos escrever a Eq. (2.16) na forma:
Ω(E) ≈ V N χ(E)
(2.17)
onde definimos:
∫
E+δE
χ(E) =
E
···
∫
d3 p 1 · · ·
∫
∫
d3 p N
dQ1 · · ·
∫
∫
dQN
dP1 · · ·
∫
dPN .
(2.18)
que é independente do volume V desde que tanto a energia cinética K quanto a energia interna Eint não dependem
do volume do container. A Eq. (2.17) varia com V N e, com isso, verificamos que se o volume do container é
duplicado, o número de estados acessíveis aumenta por um fator de 2N . Isto é esperado desde que o número
de estados acessíveis para cada partícula é duplicada; para N partículas temos então que o número de estados
acessíveis aumenta por 2 × 2 × 2 × · · · 2 = 2N .
Vamos considerar agora um caso particularmente simples em que as moléculas são monoatômicas de modo
que Eint = 0 e, deste modo, não existem as coordenadas internas Qi e Pi . Assim, a contribuição para a energia
vem apenas da energia cinética. Desde que temos N átomos que podem se deslocar em três dimensões, a energia
é dada por:
E=
N ∑
3
1 ∑
p2
2m i=1 α=1 iα
(2.19)
onde a soma em α representa as três componentes do momento, i.e., p2 = p2x + p2y + p2z onde x, y, z são representados pelos números 1, 2 e 3. A soma contém portanto 3N = f termos quadrados. Vemos então que quando
CAPÍTULO 2. DESCRIÇÃO ESTATÍSTICA DE UM SISTEMA DE PARTÍCULAS
60
E é uma constante, a Eq. (2.19) então descreve uma esfera de raio R(E) = (2mE)1/2 no espaço f -dimensional
das componentes do momento. Portanto, o número estados acessíveis Ω(E) é determinado pelo volume situado
entre as duas esferas de raios R(E + δE) e R(E). Agora, o volume de uma esfera em um espaço f -dimensional
é proporcional a Rf , desde que é essencialmente obtida multiplicando f dimensões lineares. O número total de
estados Φ(E) em esfera de raio E é proporcional ao raio Rf , i.e.,
Φ(E) ∝ Rf = (2mE)f /2 ∝ E f /2
O número de estados acessíveis pode então ser determinado usando a Eq. (2.8)
Ω(E) ∝
∂Φ(E)
∝ E f /2−1 ≈ E 3N/2
∂E
onde desprezamos a unidade desde que N ≫ 1 e trocamos f = 3N . Combinando este resultado com a Eq. (2.17),
podemos escrever Ω(E) na forma final
Ω(E) = BV N E 3N/2
(2.20)
onde a constante B é independente do volume V do container e da energia E do gás.
2.2
2.2.1
Interação entre Sistemas Macroscópicos
Interação Térmica
Conforme discutimos, a descrição de sistemas compostos por muitas partículas é realizada através da especificação
de variáveis macroscópicas independentes (x1 , x2 , · · · , xN ) que caracterizam o estado do sistema. Estes parâmetros
macroscópicos podem ser volume, pressão, campo magnético, campo elétrico, etc. Os níveis de energia do sistema
certamente irão depender dos valores destes parâmetros, assim se Er é um nível qualquer de energia do sistema,
podemos escrever
Er = Er (x1 , x2 , · · · , xN ).
(2.21)
O estado macroscópico ou macroestado do sistema é definido fornecendo-se os valores das variáveis macroscópicas do sistema. No caso de um sistema isolado, além das variáveis macroscópicas, temos que especificar
também o valor da sua energia total desde que está fixa. Assim, o ensemble representativo deste sistema é composto
por uma coleção de sistema similarmente preparados com estes valores de parâmetros; no entanto, cada sistema
2.2. INTERAÇÃO ENTRE SISTEMAS MACROSCÓPICOS
61
do ensemble pode estar em qualquer um de seus estados acessíveis que também chamamos de microestados (i.e.,
estados quânticos).
Vamos considerar dois sistemas interagentes denotados por A e A′ . Estes sistemas podem, portanto, trocar
energia entre eles de maneira que a soma das energias (energia total) permanece constante. Assim, o sistema total
composto por ambos tem sua energia constante no tempo, o que equivale a dizer que A e A′ formam um sistema
maior A(0) = A + A′ que está isolado. Em uma descrição macroscópica, podemos distinguir duas maneiras em que
estes sistemas podem interagir entre si. Eles podem trocar energia com variação dos parâmetros externos, onde
então seus níveis de energia podem mudar de posição; ou trocar energia com as demais variáveis macroscópicas
fixas no tempo. Neste último caso, os níveis de energia permanecem inalterados mudando-se apenas a população
partículas nos respectivos níveis de energia.
O segundo caso em que os níveis de energia de A e A′ ficam fixos é chamada de interação puramente térmica.
No caso de uma descrição estatística desta interação, estaremos interessados nos estados acessíveis dos sistemas
A e A′ . Sendo assim, pensamos em um ensemble de sistemas A(0) de maneira que a energia total (soma das
energias) trocada entre A e A′ seja igual para todos os membros do ensemble mas que a energia dos sistemas
A e A′ individualmente mudam de um sistema para o outro do ensemble. Com isso, podemos caracterizar esta
interação em termos da energia média do ∆Ē do sistema A. Equivalentemente , a energia média do sistema A′
é representada por ∆Ē ′ . Esta energia média é chamada de calor e o representamos pela letra Q. Note que Q
pode ser tanto negativo quanto positivo dependendo da variação de ∆Ē. Assim, quando Q > 0 dizemos que o
sistema A recebeu calor (no caso presente do sistema A′ ) e quando Q < 0 dizemos que o sistema A cedeu calor
(no caso presente para o sistema A′ ). Desde que as trocas de energia devem ser tais que a energia total do sistema
combinado permanece constante, então escrevemos:
∆Ē + ∆Ē ′ = 0
(2.22)
ou, usando a definição de calor, podemos escrever:
Q + Q′ = 0
ou
Q = −Q′ .
(2.23)
As Eqs. (2.22) e (2.23) representam a conservação da energia simplesmente dizendo que o calor cedido pelo
sistema A é igual ao calor recebido pelo sistema A′ e vice-versa.
Desde que os parâmetros externos permanecem fixos no processo, então os níveis de energia estão fixos. Desta
forma, a mudança da energia dos sistemas ocorre devido à mudança na distribuição dos sistemas no ensemble
sobre os estados acessíveis do sistema.
CAPÍTULO 2. DESCRIÇÃO ESTATÍSTICA DE UM SISTEMA DE PARTÍCULAS
62
2.2.2
Interação Mecânica
Quando um sistema não pode interagir termicamente, então dizemos que o sistema está termicamente isolado.
Neste sentido, as mudanças de energia deste sistema não podem ocorrer via transferência de calor. Para implementar este tipo de sistema experimentalmente, podemos colocá-los suficientemente separados ou envolvê-los com
um “isolante térmico". No último caso, isolantes térmicos são materiais com baixa condutividade térmica. Os
sistemas isolados térmicamente são também chamados de sistemas adiabáticos. Quando os sistemas A e A′ estão
termicamente isolados um do outro, cada sistema pode estar em equilíbrio individualmente sendo caracterizado
por um conjunto de variáveis macroscópicas. Naturalmente, estas variáveis serão diferentes para A e A′ no caso
geral. No entanto, é ainda possível que os dois sistemas interajam trocando energia através de outras formas. Neste
caso, temos o segundo tipo de interação que chamamos de interação puramente mecânica.
No caso da interação puramente mecânica, os sistemas trocam energia através da realização de um “trabalho
macroscópico" sobre o outro. Da mesma forma que no caso da interação térmica, consideramos um ensemble de
sistemas de modo que a energia trocada entre os sistemas A e A′ é uma energia média sobre um ensemble de
sistemas similarmente preparados. Assim, se denotamos a variação da energia média de A como ∆x Ē, então o
“trabalho macroscópico" realizado sobre o sistema é dado por:
W = ∆x Ē.
(2.24)
O trabalho realizado pelo sistema é o negativo do trabalho dado pela Eq. (2.24), e portanto, definido por:
W = −W = −∆x Ē.
(2.25)
Sempre que nos referimos ao trabalho de maneira geral, nos referimos ao trabalho feito pelo sistema, i.e., o
trabalho W dado pela Eq. (2.25). A conservação da energia ainda se aplica neste caso, e assim, desde que a energia
do sistema combinado é fixa (pois A(0) está isolado) então podemos escrever
W +W′ = 0
ou
W = −W ′ .
(2.26)
Como já mencionado, a interação mecânica altera os níveis de energia dos sistemas porque consiste na alteração de parâmetros externos. Além disso, as alterações nos níveis de energia Er podem ser diferentes para
diferentes valores de r. Isto ocorre mesmo quando os níveis de energia tinham iguais valores antes da interação.
Além disso, também podem ocorrer transições entre os diferentes níveis juntamente com a alterações de seus valores. Portanto, vemos que no caso da interação mecânica, a situação pode ser bastante complicada mesmo quando
os sistemas atingem o equilíbrio após os efeitos da interação.
2.2. INTERAÇÃO ENTRE SISTEMAS MACROSCÓPICOS
63
Embora pareça extremamente complicado, o trabalho realizado por um sistema pode ser medido experimentalmente. Como um exemplo, considere como nosso sistema A um gás confinado em um reservatório adiabático cuja
parede superior pode ter sua posição alterada pela ação de um pistão, conforme ilustrado na Fig. 2.2. O sistema
A′ , portanto, é o conjunto do pistão e do peso composto pelo recipiente com as bolinhas de chumbo. Considere
que este recipiente tenha um peso w. Quando o pistão é liberado de sua posição inicial, este desloca-se para baixo
aplicando um trabalho dado por W ′ = w∆s, onde ∆s = sf − si é o deslocamento vertical do pistão. Usando a
Eq. (2.26) notamos que o trabalho realizado pelo sistema A é igual a −w∆s contra o movimento do pistão. Desde
que tanto a força peso w quanto o deslocamento do pistão ∆s podem ser acessados experimentalmente, então a
energia trocada neste processo pode ser medida.
Figura 2.2: Um sistema simples onde um gás ideal está encerrado em uma câmara que cujo tamanho pode ser controlado
por um pistão via realização de um trabalho W .
2.2.3
Interação Geral
No caso mais geral possível, os parâmetros externos não são fixos nem o sistema está termicamente isolado.
Neste caso, a transferência de energia ocorre através dos dois processos, térmico e mecânico. Assim, a variação
de energia média ∆Ē apresenta as duas contribuições. Seja ∆x Ē = W a contribuição devido à mudança dos
parâmetros externos, i.e., devido a um trabalho realizado sobre o sistema. Então a mudança total na energia média
do sistema pode ser escrita na forma:
∆Ē = ∆x Ē + Q = W + Q
(2.27)
CAPÍTULO 2. DESCRIÇÃO ESTATÍSTICA DE UM SISTEMA DE PARTÍCULAS
64
onde a quantidade Q é o calor fornecido ao sistema através da interação térmica com algum outro sistema. A Eq.
(2.27) nos permite definir o calor em termos do trabalho e da variação da energia do sistema, assim, escrevemos:
Q ≡ ∆Ē − W = ∆Ē + W
(2.28)
onde usamos W = −W , onde W é o trabalho realizado pelo sistema. A Eq. (2.28) é a definição do calor recebido
pelo sistema. Note que esta relação se reduz ao caso da interação puramente térmica quando fazemos o trabalho
W igual a zero. A Eq. (2.28) nos permite separar as duas contribuições para a variação da energia do sistema em
mecânica e térmica. Notamos também que tanto o calor como o trabalho tem dimensões de energia, ou seja, são
medidos em Joules no sistema internacional de unidades.
Quando consideramos mudanças infinitesimais na energia, então a Eq. (2.27) pode ser escrita na forma diferencial
dQ
¯ = dE +dW
¯
(2.29)
onde denotamos pordW
¯ a quantidade infinitesimal de trabalho realizado pelo sistema edQ
¯ a quantidade infinitesimal de calor trocado; dE é a variação correspondente da energia do sistema.
É importante lembrar que tanto o trabalho como o calor não são variáveis de estado, assim, não faz sentido em
falar de trabalho e calor antes e depois do processo ou a diferença entre estes. Estas são quantidades referentes ao
próprio processo termodinâmico.
2.3
Processos Quasi-Estáticos
Nas seções anteriores definimos dois tipos de processos que podem alterar o estado de um sistema. Estes processos
são completamente gerais pois não fizemos nenhuma particularização sobre como estes processos são realizados.
Um caso especial e muito importante, é quando o sistema A interage com algum outro sistema de maneira tão lenta
que o sistema A permanece arbitrariamente próximo do estado de equilíbrio em todos os estágios do processo. Tal
processo é chamado de quasi-estático para o sistema A. Uma questão natural que surge é qual o tempo que o
processo deve levar para ser considerado como quasi-estático. A resposta está no tempo τ (tempo de relaxação)
do sistema, que é o tempo que o sistema gasta para entrar em equilíbrio se é repentinamente perturbado. Para ser
lento o bastante, o tempo que o processo leva para ir de um estado inicial a um estado final deve ser muito maior
que o tempo de relaxação. Por exemplo, se o gás do container da Fig. 2.2 tem um tempo τ = 10−3 s, então se o
volume do gás é reduzido à metade em 0,1s então podemos considerar o processo como sendo quasi-estático.
2.3. PROCESSOS QUASI-ESTÁTICOS
65
Se os parâmetros externos do sistema são denotados pelos valores x1 , x2 , · · · , xn , então a energia do sistema
em um estado quântico definido r tem o valor
Er = Er (x1 , x2 , · · · , xn ).
(2.30)
Quando os parâmetros externos são alterados, a energia deste estado r muda de acordo com a relação funcional
dada pela Eq. (2.30). Em particular, quando os parâmetros são mudados de forma infinitesimal, i.e., de modo que
xα → xα + dxα para cada α, então a Eq. (2.30) nos permite computar a mudança na energia:
dEr =
n
∑
∂Er
α=1
∂xα
dxα .
(2.31)
O trabalho dW
¯ feito pelo sistema quando ele permanece neste estado particular r é então definido da seguinte
forma:
dW
¯ r ≡ −dEr =
∑
Xα,r dxα
(2.32)
α
onde introduzimos a definição:
Xα,r = −
∂Er
.
∂xα
(2.33)
A Eq. (2.33) é chamada de “força generalizada" (conjugada ao parâmetro externo xα ) no estado r. Quando xα
denota uma distância, então Xα denota simplesmente uma força ordinária.
Vamos considerar agora um ensemble de sistemas com o objetivo de fazer uma descrição estatística. Quando
os parâmetros externos do sistema são alterados de maneira quasi-estática, então as forças generalizadas Xα,r têm
valores médios bem definidos. Estes valores médios podem ser determinados através da média sobre o ensemble
de sistemas correspondendo à situação de equilíbrio, consistentes com os valores dos parâmetros externos naquele
instante. Assim, tomando a média sobre todos os estados acessíveis r, podemos escrever
dW
¯ =
n
∑
X̄α,r dxα
(2.34)
∂Er
∂xα
(2.35)
α=1
onde
X̄α,r = −
é a força média generalizada conjugada à variável xα . Aqui as quantidades médias são determinadas com a
distribuição de equilíbrio dos sistemas no ensemble correspondendo aos valores fixos dos parâmetros α. O trabalho
macroscópico W resultante de uma mudança quasi-estática finita pode ser obtida por meio de uma integração.
CAPÍTULO 2. DESCRIÇÃO ESTATÍSTICA DE UM SISTEMA DE PARTÍCULAS
66
2.3.1
Trabalho quasi-estático realizado pela pressão
Vamos considerar agora um exemplo importante de processo quasi-estático, onde uma pressão realiza um trabalho
de maneira que o único parâmetro externo é o volume do sistema V . Então o trabalho feito para mudar o volume
de V para V + dV pode ser calculado através do uso de mecânica elementar através do produto da força pelo
deslocamento. Suponha que o sistema é um conjunto de um pistão comprimindo um gás contido em um cilindro
(sistema mostrado na Fig. 2.2). Se o sistema está no estado r, então denote a pressão sobre a área A do pistão como
sendo pr . A força exercida pelo sistema sobre o pistão é simplesmente pr A. O volume do sistema é especificado
por V = As, onde s é a posição inicial do pistão. Se o pistão é deslocado lentamente por uma distância ds de
modo que o sistema permanece em equilíbrio no estado r, o sistema realiza um trabalho dado por:
dW
¯ r = (pr A) ds = pr dV
(2.36)
e desde que dEr = −¯
dWr , então segue que:
pr = −
∂Er
∂V
(2.37)
e vemos então que a pressão é a força generalizada conjugada à variável volume.
Se o volume do sistema é alterado de maneira quasi-estática, o sistema permanece em equilíbrio térmico de
maneira que a pressão apresenta um valor médio bem definido p̄. O trabalho macroscópico é então dado pela
média da Eq. (2.36):
dW
¯ = p̄ dV.
(2.38)
Agora suponha que o trabalho é realizado de maneira quasi-estática de modo que o volume varia desde um
valor inicial Vi até um valor final Vf . Neste caso, a pressão média p̄ tem uma dependência com o volume descrita
por alguma função p̄ = p̄(V ). Assim, o trabalho total do estado inicial i até o estado final f é obtido através da
integração da Eq. (2.38):
∫
Wif =
f
p̄(V ) dV.
(2.39)
i
Geometricamente, a integral dada pela Eq. (2.39) representa a área sob a curva p̄(V ) em um diagrama p̄-V .
2.4
Diferenciais Exatas e Inexatas
A Eq. (2.29) relaciona três diferenciais dE,dW
¯ edQ.
¯ Temos utilizado umd¯com um traço porque as diferenciais do
trabalho e do calor têm propriedades diferentes em comparação com a diferencial da energia. Vamos analisar estas
2.4. DIFERENCIAIS EXATAS E INEXATAS
67
diferenciais em maiores detalhes. Para isso, vamos considerar o problema puramente matemático onde temos uma
função F (x, y) que depende de duas variáveis x e y. Assim, o valor de F é determinado uma vez que as variáveis
x e y são especificadas. Vamos considerar uma variação infinitesimal de x e y de modo que a variação de F (x, y)
possa ser escrita da seguinte forma:
dF = F (x + dx, y + dy) − F (x, y)
(2.40)
o que também pode ser expresso na forma:
dF = A(x, y)dx + B(x, y)dy
onde identificamos A e B com as derivadas parciais:
A(x, y) =
∂F
,
∂x
B(x, y) =
∂F
.
∂y
A Eq. (2.40) implica que F (x, y) é simplesmente uma diferencial, i.e., a diferença de valores de F entre dois
pontos adjacentes. A diferencial dF é chamada de diferencial exata para distinguí-la de outros tipos de diferenciais
que serão discutidas logo mais. Primeiro, notamos que para ir de um ponto inicial dado pelas coordenadas (xi , yi )
até um ponto final (xf , yf ), a mudança na função F (x, y) pode ser determinada por meio de uma integração:
∆F = Ff − Fi =
∫
∫
f
dF =
i
f
[A(x, y)dx + B(x, y)dy]
i
Vemos então que a diferença no lado esquerdo da equação depende apenas da diferença entre dois pontos Ff
e Fi e, portanto, a integração do lado direito não pode depender do caminho tomado para ir do ponto i ao ponto f .
Este tipo de característica só ocorre com função cuja diferencial é exata, ou seja, que pode ser colocado na forma
da Eq. (2.40).
Vamos considerar agora um outro par de funções A′ (x, y) e B ′ (x, y) tal que
A′ (x, y)dx + B ′ (x, y)dy ≡ dG
¯
onde o segundo membro é apenas uma maneira abreviada de escrever o primeiro membro. Apesar de dG
¯ ser
certamente uma quantidade infinitesimal, não é uma quantidade que pode ser considerada como uma diferencial
exata, i.e., em geral não é possível encontrar uma função G = G(x, y) tal que dG = G(x + dx, y + dy) − G(x, y)
igual à Eq. (2.40). De maneira equivalente, podemos dizer que em geral não é verdade que se alguém soma
(integra) quantidades infinitesimais dG
¯ indo de um ponto inicial i até um ponto final f ao longo de um certo
caminho, a integral resultante
∫
∫
f
f
dG
¯ =
i
[A′ (x, y)dx + B ′ (x, y)dy]
i
será independente do caminho escolhido. Neste caso chamamosdG
¯ de diferencial “inexata".
CAPÍTULO 2. DESCRIÇÃO ESTATÍSTICA DE UM SISTEMA DE PARTÍCULAS
68
Exemplo
1. Considere a quantidade infinitesimal
dG
¯ = α dx + β
x
dy
y
onde α e β são constantes. Seja i o ponto inicial (1, 1) e f o ponto (2, 2). Considerando que estes pontos são as
diagonais de um quadrado, calcule a integral de dG
¯ ao longos dos caminhos:
(a) C1 : (1, 1) → (2, 1) → (2, 2)
(b) C2 : (1, 1) → (1, 2) → (2, 2)
Solução
(a)
Vamos considerar o primeiro caminho. Neste caso, temos que:
∫
∫
x
dG
¯ =
[α dx + β dy] =
y
C1
C1
∫
∫
2
2
α dx +
1
β
1
2
dy
y
∫
dG
¯ = α + 2β ln 2.
C1
(b)
No caso do caminho C2 temos ainda:
∫
∫
dG
¯ =
C2
[α dx + β
C2
x
dy] =
y
∫
2
β
1
1
dy +
y
∫
2
α dx
1
∫
dG
¯ = α + β ln 2.
C2
Vemos então que as integrais são diferentes para os caminhos C1 e C2 o que implica que G é uma diferencial
inexata.
Agora, a quantidade infinitesimal
dF ≡
dG
¯
α
β
= dx + dy
x
x
y
2.4. DIFERENCIAIS EXATAS E INEXATAS
69
é uma diferencial exata de uma função bem definida F (x, y) = α ln x + β ln y. A integral de i até f é sempre igual
a
∫
∫
f
f dG
¯
dF =
i
i
x
= (α + β) ln 2
independente do caminho tomado do ponto i ao ponto f . Verifique isso!
Agora que ficou claro a diferença entre diferenciais exatas e inexatas, vamos voltar à discussão da descrição
estatística dos sistemas físicos. O macroestado é caracterizado através de quantidades macroscópicas como energia
média Ē, pressão p̄, volume V etc. Em geral, uma vez que temos especificado algumas das variáveis podemos
determinar outras quantidades macroscópicas. Por exemplo, uma vez que temos especificado Ē e p̄ podemos obter
o volume do sistema. Assim, as diferenciais dp̄, dĒ são diferenças infinitesimais entre quantidades associadas a
estados físicos bem definidos. Desta forma, estas diferenciais são diferenciais ordinárias (i.e., diferenciais exatas).
Por exemplo, dĒ = Ēf − Ēi é simplesmente a diferença entre dois valores bem definidos de energia. Assim,
podemos escrever:
∆Ē = Ēf − Ēi =
∫
f
dĒ
i
o que implica que a integral é uma soma sobre todos os incrementos de energia ganhos no processo que leva o
sistema do estado inicial até o final. Estes dependem apenas dos estados final e inicial e não do caminho tomado
do ponto i ao ponto f .
Por outro lado, considere o trabalho infinitesimal dW
¯ feito pelo sistema para ir de um macroestado i a um
macroestado final f . Em geral, dW
¯ =
∑
X̄α dxα não é a diferença entre dois números correspondentes aos
macroestados final e inicial. Com efeito, esta é uma quantidade infinitesimal característica do processo indo do
ponto i ao ponto f . O trabalho é então, em geral, uma diferencial inexata. O trabalho total feito pelo sistema para
ir de um estado i ao estado f pode ser escrita como
∫
Wif =
f
dW
¯
i
onde a integral significa simplesmente uma soma de quantidades infinitesimais de trabalho dW
¯ feitos em cada
estágio do processo. Mas no geral, o valor da integral depende do processo particular tomado para ir de um
macroestado i ao macroestado f .
Desde que o trabalho depende do caminho tomado e energia média não depende, segue da Eq. (2.29) que o
calor Q também depende do caminho da mesma forma que o trabalho. Assim, a quantidade infinitesimal dQ
¯ é
meramente uma quantidade infinitesimal de calor trocado no processo e é uma diferencial inexata.
CAPÍTULO 2. DESCRIÇÃO ESTATÍSTICA DE UM SISTEMA DE PARTÍCULAS
70
Note que quando o sistema está termicamente isolado, i.e., de modo que Q = 0, a Eq. (2.29) implica que
∆Ē = −Wif
ou seja, o trabalho depende apenas da diferença entre os valores de energia final e inicial e é independente do
processo. Neste caso, o trabalho se torna uma diferencial exata. Assim, temos um resultado que é referido como a
1a lei da Termodinâmica:
Se um sistema termicamente isolado é trazido de um macroestado inicial a um
macroestado final, o trabalho realizado pelo sistema é independente do processo
realizado.
Reciprocamente, se as variáveis externas são mantidas fixas, então o trabalho realizado pelo sistema é zero.
Neste caso,dW
¯ = 0 e pela Eq. (2.29) nos permite escrever:
dĒ = dQ
e o calor se torna uma diferencial exata. A quantidade de calor absorvido pelo sistema independe do processo
usado sendo dependente apenas dos pontos inicial e final.
Exemplos
1. Considere um ensemble de osciladores harmônicos clássicos unidimensionais.
(a) Seja x o deslocamento de um oscilador em função do tempo t dado por x = A cos(ωt + φ). Assuma que
o ângulo de fase φ é equiprovável de assumir qualquer valor no intervalo 0 < φ < 2π. A probabilidade
W (φ) dφ que φ esteja entre φ e φ + dφ é então simplesmente dado por W (φ) dφ = dφ/2π. Para qualquer
tempo fixo t, encontre a probabilidade P (x) dx que x fique entre x e x + dx somando-se W (φ) dφ sobre
todos os ângulos φ para os quais x fique dentro deste intervalo. Expresse P (x) em termos de A e x.
(b) Considere o espaço de fase clássico para um ensemble de osciladores harmônicos, de modo que a energia
fique em um pequeno intervalo entre E e E + δE. Calcule P (x) dx tomando a razão daquele volume do
espaço de fase dentro deste intervalo de energia e no intervalo entre x e x + dx pelo volume total do espaço
de fase para valores de energia situados no intervalo entre E e E + δE (Veja Fig. 2-3-1 do livro do Reif.).
Relacionando E com a amplitude A, mostre que o resultado é o mesmo obtido na parte (a) do problema.
Solução
2.4. DIFERENCIAIS EXATAS E INEXATAS
71
(a)
Para resolver o item (a), recorremos à Eq. (1.53), do capítulo 1 adaptada para o caso presente:
P (x) dx = 2W (φ)
dφ
dx
dx
onde o fator 2 foi colocado para levar em consideração o fato do deslocamento x(t) ser uma função biunívoca da
fase. Assim, prescisamos determinar a derivada de φ em relação a x:
1
dφ
=
dx
dx
dφ
e substituindo-se x(t) = A cos(ωt + φ), segue que:
dφ
1
=
=
dx
|−A sin(ωt + φ)|
1
1
√
=√
,
2
2
2
A − x2
A −x
−A
A
−A < x < +A.
Assim, como W (φ) = 1/2π, podemos escrever a probabilidade P (x) dx diretamente:
P (x) dx = 2
1
1
√
dx,
2
2π A − x2
dx
P (x) dx = √
π A2 − x2
onde
−A < x < +A
− A < x < +A
que é a resposta procurada.
(b)
Vamos fazer o mesmo cálculo que no item (a), exceto que a metodologia aqui será a determinação da razão
entre o volume do espaço de fase a posição assume o valor entre x e x + dx e, ao mesmo tempo, a energia o valor
entre E e E + δE pelo volume total do espaço de fase onde a energia assume o valor entre E e E + δE. Para isso,
escrevemos abaixo a energia de um oscilador harmônico unidimensional:
E=
p2
1
+ mω 2 x2
2m 2
o que pode ser colocado na forma:
x2
p2
+
=1
2E
2mE
mω 2
√
√
que é a equação da elipse com semi-eixos a = 2mE e b = 2E/mω 2 . A área da elipse é simplesmente dada
por:
√
√
A = πab = π 2mE 2E/mω 2
CAPÍTULO 2. DESCRIÇÃO ESTATÍSTICA DE UM SISTEMA DE PARTÍCULAS
72
donde
A(E) =
2π
E
ω
O número de estados acessíveis V (E) para o oscilador harmônico com energia entre E e E + dE será dado
por:
V (E) = A(E + δE) − A(E) ≈
∂A
δE
∂E
ou seja,
V (E) =
2π
δE.
ω
Agora precisamos determinar o volume do espaço de fase de modo que a posição esteja entre x e x + dx.
Para isso, verificamos simplesmente que o volume é dado por dxdp que é o elemento de área do espaço de fase.
No entanto, como a elipse está centrada na origem, então temos ainda um segundo conjunto de estados onde o
momento linear pode assumir valores negativos. Neste caso, temos um elemento de volume dxdp no primeiro
quadrante e um segundo elemento de volume idêntico no quarto quadrante. Com isso, temos então que:
v(E) = 2dxdp.
A probabilidade P (x)dx é então determinada pela razão:
P (x)dx =
2dxdp
v(E)
=
2π
V (E)
δE
ω
(2.41)
O elemento infinitesimal δE pode ser escrito em termos de dp:
∂E
∂
δE =
δp =
∂p
∂p
(
)
p2
p
dp = dp
2m
m
ou seja,
dp =
m
m
δE = √
δE
p
2mE − m2 ω 2 x2
onde isolamos p na expressão para a energia do oscilador harmônico.
Agora, notamos ainda que
p(t) = m
dx
= −mωA sin(ωt + φ)
dt
e substituindo p(t) e x(t) na expressão para a energia total, segue que:
E=
p2
1
+ mω 2 x2
2m 2
(2.42)
2.4. DIFERENCIAIS EXATAS E INEXATAS
E=
73
1
1
mω 2 2
(−mωA sin(ωt + φ))2 + mω 2 (A cos(ωt + φ))2 =
A
2m
2
2
o que nos permite escrever:
2mE = m2 ω 2 A2
e substituindo este resultado na Eq. (2.42) segue que:
dp =
m
m
δE
δE = √
δE = √
p
m2 ω 2 A2 − m2 ω 2 x2
ω A2 − x2
e substituindo este resultado na Eq. (2.41), obtemos:
P (x)dx =
2dx
δE
√
2π
2
2
δE ω A − x
ω
ou ainda,
dx
P (x) dx = √
,
π A2 − x2
que o mesmo resultado obtido no item (a).
−A < x < +A
(2.43)
74
CAPÍTULO 2. DESCRIÇÃO ESTATÍSTICA DE UM SISTEMA DE PARTÍCULAS
Capítulo 3
Termodinâmica Estatística
Uma vez que temos estabelecido os princípios básicos da Física Estatística nos dois últimos capítulos, vamos
agora considerar sua conexão com a Termodinâmica. É importante notar que a Termodinâmica é uma ciência
completamente macroscópica sendo desenvolvida há muitos anos antes da Física Estatística. No entanto, neste
capítulo mostraremos que todas as leis da Termodinâmica são conseqüências naturais dos postulados básicos da
Física Estatística.
3.1
Irreversibilidade e a aproximação para o equilíbrio
Conforme temos mencionado ao longo do curso, as teorias que estamos estudando são aplicadas na condição de
equilíbrio. No entanto, diferentes estados de equilíbrio são obtidos para diferentes condições externas e, desta
forma, precisamos caracterizar o estado de equilíbrio em termos dos parâmetros macroscópicos que caracterizam
o macroestado. Além disso, veremos que a relação entre o equilíbrio e as variáveis externas que caracterizam o
sistema permitem determinar a reversibilidade dos processos termodinâmicos.
3.1.1
Condições de equilíbrio e restrições
Para analisar a função das restrições sobre as condições de equilíbrio do sistema, vamos considerar um sistema
isolado cuja energia está especificada em um intervalo entre E e E + δE. Como usual, chamamos de Ω(E)
o número de estados acessíveis a este sistema. No equilíbrio, o sistema é equiprovável de ser encontrado em
qualquer um destes estados. As restrições sobre o estado do sistema são implementadas especificando-se alguns
parâmetros y1 , y2 , · · · , yn . O número de estados acessíveis será então uma função destes parâmetros:
Ω = Ω(y1 , y2 , · · · , yn )
75
CAPÍTULO 3. TERMODINÂMICA ESTATÍSTICA
76
tal que cada parâmetro yα tem seu valor no intervalo entre yα e yα + δyα .
Suponha que inicialmente o sistema está em equilíbrio com o número de estados acessíveis dado por Ωi .
Agora, suponha que retiramos algumas restrições de maneira que temos agora Ωf estados acessíveis. Os Ωi ainda
permanecem acessíveis mas agora temos mais estados do que a situação inicial, assim, podemos escrever:
Ωf ≥ Ωi .
(3.1)
Quando consideramos um ensemble de sistemas identicamente preparados de maneira que tenham Ωi estados
acessíveis, então após a retirada da restrição, a fração de sistemas que ainda estarão ocupando os Ωi estados será:
Pi =
Ωi
Ωf
que também pode ser interpretado como a probabilidade de encontrar um sistema na situação inicial após a retirada
da restrição. Aqui vale considerar o exemplo simples de uma câmara em que um gás está confinado em metade do
volume da câmara. Após a retirada da restrição, a probabilidade de encontrar o gás na condição inicial será:
( )N
P=
1
2
onde N é o número de moléculas, que em geral, é da ordem do número de Avogadro, i.e., ∼ 1023 .
Vamos considerar esta situação em termos dos parâmetros gerais y1 , y2 , · · · , yn . Quando yi é permitido variar,
o sistema estará em equilíbrio quando todos os estados acessíveis são equiprováveis. Assim, a distribuição de
equilíbrio P (y) de encontrar o sistema entre y e y + δy é proporcional ao número de estados acessíveis, ou seja,
P (y) ∝ Ω(y).
Esta propriedade implica na ocorrência dos possíveis valores de y, que em geral, será muito diferente da
situação inicial quando y = yi . Assim, a situação evolui no tempo até que a distribuição uniforme de sistemas
sobre os estados acessíveis seja atingida, i.e., os vários valores de y ocorram com a probabilidade dada por Ω(y).
Usualmente, Ω(y) tem um valor máximo pronunciado para um dado ye. Neste caso, todos os sistemas terão
valores correspondendo à situação mais provável onde y ∼ ye. Vemos então que quando yi ̸= ye, o parâmetro y vai
mudar no tempo após a restrição ser removida até que se atinja o valor de equilíbrio ye.
Com isso, concluímos:
Se algumas restrições de um sistema isolado são retiradas, os parâmetros do sistema
tendem a se reajustar até que
Ω(y1 , y2 , · · · , yn ) se aproxime de um valor máximo
Ω(y1 , y2 , · · · , yn ) → máximo.
.
3.2. INTERAÇÃO ENTRE SISTEMAS MACROSCÓPICOS
3.1.2
77
Processos Reversíveis e Irreversíveis
Se um sistema está inicialmente distribuído entre seus Ωi estados acessíveis, e então retiramos algumas restrições,
o sistema irá atingir um novo estado de equilíbrio caracterizado por Ωf estados acessíveis. Se recolocamos as
restrições, não conseguiremos recuperar a situação inicial.
Dizemos então que um processo é irreversível quando este leva um sistema de um estado inicial a um estado
final de modo que a imposição/retirada de restrições não restaura a situação inicial. Por outro lado, se conseguimos
recuperar a situação anterior dizemos que o processo é reversível. Em termos de estados acessíveis, um processo
irreversível é caracterizado por Ωf > Ωi . Certamente é possível encontrar um caso particular em que Ωf = Ωi .
Neste caso, impor ou remover restrições não irá modificar a distribuição dos estados do sistema. Assim, o equilíbrio
do sistema não é alterado e o processo é dito ser reversível.
Em resumo: se as restrições de um sistema isolado em equilíbrio são removidas, o número de estados acessíveis
pode somente aumentar ou permanecer o mesmo, i.e., Ωf ≥ Ωi . Com isso, temos duas possibilidades:
(a) Ωi = Ωf . O sistema já se encontra em equilíbrio e o processo é dito ser reversível.
(b) Ωi > Ωf . Ωi é uma situação improvável e o sistema muda no tempo até que uma nova situação de equilíbrio
seja alcançada.
3.2
Interação entre Sistemas Macroscópicos
Na seção anterior discutimos os conceitos de reversibilidade e de equilíbrio em termos de estados acessíveis a um
sistema isolado. Quando algum parâmetro externo (e.g., y) é permitido mudar no tempo, o sistema irá evoluir
até que se atinja um novo estado de equilíbrio caracterizado por um novo valor do parâmetro, diferente do valor
inicial. Este valor é encontrado a partir do máximo da função Ω(y). Esta prescrição é válida tão logo o sistema
esteja em equilíbrio. Vamos agora aplicar esta prescrição na análise entre dois sistemas que interagem primeiro
termicamente e, após isso, consideramos o caso geral em que os sistemas são permitidos realizarem trabalho um
sobre o outro.
3.2.1
Interação térmica entre sistemas macroscópicos
Distribuição de energia entre sistemas em equilíbrio
Vamos considerar dois sistemas interagentes A e A′ de modo que o sistema combinado A(0) = A + A′ está completamente isolado. No entanto, os sistemas A e A′ podem trocar calor entre si de modo que no equilíbrio, o sistema
CAPÍTULO 3. TERMODINÂMICA ESTATÍSTICA
78
A tem energia no intervalo entre E e E + δE e o sistema A′ tem energia entre E ′ e E ′ + δE ′ . Consideramos ainda
que os parâmetros externos estão fixos e os sistemas não podem realizar trabalho um sobre o outro. Com o objetivo
de analisar o estado de equilíbrio entre os dois sistemas, vamos denotar por Ω(E) e Ω′ (E ′ ) os números de estados
acessíveis para os sistemas A e A′ .
Consideramos que a interação entre os sistemas seja fraca de modo que as energias dos sistemas são aditivas,
assim, podemos escrever:
E (0) = E + E ′ = constante.
Suponha que A e A′ estão em equilíbrio um com o outro. Neste caso, podemos focar nossa atenção em um
ensemble representativo. Com isso, queremos dizer que A pode assumir um intervalo grande de valores de energia
com diferentes probabilidades. Se A tem uma energia E, então o sistema A′ deve ter uma energia dada por:
E ′ = E (0) − E.
O número de estados acessíveis ao sistema combinado A(0) pode ser escrito em termos de um único parâmetro,
a energia E do sistema A. Seja Ω(0) o número de estados acessíveis de A(0) quando o sistema A tem energia no
intervalo entre E e E + δE. No equilíbrio, A(0) está uniformemente distribuído entre estes estados. Assim, a
probabilidade de encontrar o sistema A(0) em um estado em que o subsistema A tem um valor de energia entre E
e E + δE é dado por:
P (E) = CΩ(0) (E).
(3.2)
Quando A tem energia E, este sistema pode estar em qualquer um de seus Ω(E) estados. Ao mesmo tempo,
A′ pode estar em qualquer um de seus Ω′ (E ′ ) = Ω′ (E (0) − E) estados. Com isso, podemos escrever a Eq. (3.2)
como:
P (E) = CΩ(E)Ω′ (E (0) − E).
(3.3)
Notamos que tanto Ω(E) quanto Ω′ (E (0) − E) são funções que variam muito rapidamente em função de
seus argumentos. Com efeito, enquanto Ω(E) aumenta muito rapidamente com a energia E, Ω′ diminui muito
rapidamente com E. Como resultado, o produto destas funções deve exibir um máximo muito pronunciado para
e Este valor de energia, para o qual temos um máximo em Ω(0) , é obtido quando
um valor de energia específico E.
e pode ser localizado através da prescrição:
sistema atinge o estado de equilíbrio. Desta forma, E
dP (E)
dE
e
E=E
=0
∴
d ln P (E)
dE
e
E=E
=0
3.2. INTERAÇÃO ENTRE SISTEMAS MACROSCÓPICOS
79
e substituindo a Eq. (3.3), segue que:
] d ln Ω(E) d ln Ω′ (E ′ ) dE ′
d ln P (E)
d [
=
ln C + ln Ω(E) + ln Ω′ (E ′ ) =
+
dE
dE
dE
dE ′
dE
e como
dE ′ d(E (0) − E)
=
= −1
dE
dE
obtemos então
d ln P (E) d ln Ω(E) d ln Ω′ (E ′ )
=
−
dE
dE
dE ′
e podemos escrever ainda:
e calculando no ponto E = E,
d ln P (E)
dE
e
E=E
=
d ln Ω(E)
dE
e
E=E
−
d ln Ω′ (E ′ )
dE ′
e
E=E
=0
de onde obtemos a igualdade:
e = β ′ (E
e ′ ).
β(E)
(3.4)
Aqui usamos a definição:
β≡
d ln Ω(E)
dE
(3.5)
e ′ = E(0) − E.
e
eE
A Eq. (3.5) é uma das relações fundamentais da termodinâmica pois implica na condição necessária para
que dois sistemas interagentes estejam em equilíbrio. O parâmetro β tem dimensões do inverso da energia. É
conveniente trabalhar com um parâmetro adimensional T definido por:
kT =
1
β
(3.6)
onde k é uma constante de proporcionalidade com dimensões de energia e cuja magnitude pode ser escolhida de
maneira arbitrária. Futuramente iremos discutir a convenção utilizada para fixar o valor da constante k.
Multiplicando a Eq. (3.5) por k e lembrando que é uma constante, podemos escrever:
kβ ≡
d[k ln Ω(E)]
.
dE
Definindo a chamada entropia S como
S = k ln Ω
(3.7)
CAPÍTULO 3. TERMODINÂMICA ESTATÍSTICA
80
e usando a Eq. (3.6), podemos escrever:
1
dS
=
.
T
dE
(3.8)
Desde que a entropia é proporcional ao logaritmo da densidade de estados, podemos escrever a condição de
máximo da probabilidade da seguinte maneira:
S + S ′ = máximo
(3.9)
T = T ′.
(3.10)
que ocorre quando
Notamos então que temos vários modos de obter a condição de equilíbrio para sistemas que interagem trocando
calor. Podemos estabelecer a condição através da igualdade T = T ′ (ou, alternativamente β = β ′ ) ou ainda dizendo
que no equilíbrio a entropia do sistema (entropia total) é máxima.
3.2.2
A aproximação do equilíbrio térmico
Na seção anterior derivamos condições para que dois sistemas (A e A′ ) que trocam calor entre si fiquem em equilíbrio. Quando esta condição é satisfeita, existe uma probabilidade muito grande de que o sistema A tenha um valor
e e o sistema A′ tenha um valor de energia E
e ′ = E (0) − E.
e Isto ocorre porque a probabilidade P (E)
de energia E
e e é muito reduzida para valores ligeiramente diferentes de E.
e Por esta razão, as enertem um máximo para E = E
gias médias dos sistemas A e A′ também são muito próximas do valor de energia que maximiza a probabilidade,
i.e.,
e
Ē = E
e
e ′.
Ē ′ = E
(3.11)
Suponha agora que temos dois sistemas A e A′ inicialmente isolados um do outro, caracterizados pelas energias
médias Ēi e Ēi′ . Quando os sistemas são colocados em contato térmico, as energias mudam no tempo até que as
energias médias atinjam os valores Ēf e Ēf′ que satisfazem a condição:
e
Ēf = E
∴
e′
Ēf′ = E
(3.12)
eeE
e ′ são os valores que maximizam a distribuição de probabilidades P (E).
onde E
Os parâmetros β dos sistemas são iguais quando os sistemas atingem o equilíbrio, assim, podemos escrever:
βf ≡ β(Ēf )
e
βf′ ≡ β(Ēf′ ).
(3.13)
3.2. INTERAÇÃO ENTRE SISTEMAS MACROSCÓPICOS
81
A probabilidade no estado final é máxima, com isso, podemos expressar a condição de equilíbrio comparando
as entropias do estado final e estado inicial. Usando a Eq. (3.9), podemos escrever:
S(Ēf ) + S ′ (Ēf′ ) ≥ S(Ēi ) + S ′ (Ēi′ )
(3.14)
∆S + ∆S ′ ≥ 0,
(3.15)
ou ainda, de maneira equivalente:
onde
∆S = S(Ēf ) − S(Ēi ),
∆S ′ = S ′ (Ēf′ ) − S ′ (Ēi′ ).
Desde que o sistema combinado A(0) está termicamente isolado com seus parâmetros externos fixos, então sua
energia é constante, assim, podemos expressar a conservação de energia na interação entre os sistemas na forma:
Ēf + Ēf′ = Ēi + Ēi′ .
(3.16)
Estamos considerando que os sistemas A e A′ não realizam trabalho um sobre o outro de modo que as variações
de energias que os sistemas sofrem são decorrentes de troca de calor. Como resultado, a conservação da energia
dada pela Eq. (3.16) pode ser escrita na forma:
Q + Q′ = 0
∴
Q = −Q′
(3.17)
onde
Q =Ēf − Ēi ,
Q′ =Ēf′ − Ēi′ .
A Eq. (3.17) expressa o fato de que o calor cedido pelo sistema A′ é absorvido pelo sistema A. Por convenção,
chamamos o sistema que cede calor de “quente" e o sistema que absorve o calor de “frio". Existem duas situações
que podem ocorrer quando os sistemas A e A′ são colocados em contato térmico:
e e a condição de máximo da
(a) As energias iniciais podem ser tais que βi = βi′ . Neste caso, temos que Ēi = E
probabilidade (ou entropia) já está satisfeita. Como resultado, os corpos não trocam calor.
(b) De modo geral, as energias iniciais são diferentes, i.e., βi ̸= βi′ . Neste caso, após o contato térmico os sistemas
se encontram em uma situação muito improvável. Esta situação irá evoluir no tempo até que a condição de
e
máxima probabilidade seja satisfeita. Neste caso, encontramos as energias médias dos sistemas iguais a Ē = E
e ′ quando βf = β ′ .
e Ē ′ = E
f
CAPÍTULO 3. TERMODINÂMICA ESTATÍSTICA
82
3.2.3
Temperatura
Nas seções precedentes, definimos a quantidade
T=
1
kβ
que tinha duas propriedades:
(a) Se dois sistemas tem o mesmo parâmetro β quando em equilíbrio individualmente, estes dois sistemas iriam
permanecer em equilíbrio quando fossem colocados em contato térmico um com o outro;
(b) Se os parâmetros fossem diferentes inicialmente, então os corpos não iriam permanecer em equilíbrio quando
colocados em contato térmico.
A conseqüência disso é resumida pela “lei zero da termodinâmica". Para entender esta lei, considere três
sistemas A, B e C caracterizados pelos parâmetros βA , βB e βC . Assim, se βA = βC e βB = βC , então concluímos
que ao colocar os sistemas A e B em contato, estes já estarão em equilíbrio pois βA = βB . Com isso, chegamos à
lei zero da termodinâmica:
Se dois sistemas estão em equilíbrio térmico com um terceiro sistema, então eles
estarão em equilíbrio térmico entre si.
Esta lei permite desenvolver dispositivos chamados termômetros que apresentam as seguintes características:
(a) Possuir um parâmetro (ϑ) que varia muito quando colocado em contato térmico com outros corpos; os demais
parâmetros permanecem fixos. Este parâmetro é chamado parâmetro termométrico;
(b) o termômetro deve ser muito pequeno de modo a não afetar o equilíbrio térmico do sistema que está sendo
testado.
Se o parâmetro termométrico ϑ é o mesmo quando o termômetro é colocado em contato térmico com os
sistemas A e B, então podemos dizer que A e B estão em equilíbrio térmico. Por outro lado, se ϑ tem valores
diferentes quando o termômetro é colocado em contato com A e B, então haverá troca de calor entre os dois
sistemas após o contato térmico. Os dois sistemas ficarão em equilíbrio térmico somente quando estiverem à
mesma temperatura.
Notamos então que o valor da temperatura apresenta uma arbitrariedade pois depende da substância termométrica do termômetro. Assim, precisamos trabalhar com um tipo de parâmetro específico que não depende do tipo de
substância termométrica. Para isso, notamos que ao colocar o termômetro M em contato com o corpo A, devemos
ter βM = βA . Um termômetro M ′ levaria à condição βM ′ = βA . Vemos então que βM = βM ′ = βA e quando
3.2. INTERAÇÃO ENTRE SISTEMAS MACROSCÓPICOS
83
usamos o parâmetro β como parâmetro termométrico, este leva à mesma leitura da temperatura para quaisquer
termômetros. O parâmetro T = 1/kβ é chamado de temperatura absoluta e mede uma propriedade fundamental
da densidade de estados do sistema.
Algumas propriedades da temperatura absoluta
Aqui relembramos que
1
∂ ln Ω
=β≡
kT
∂E
e como já sabemos, Ω é uma função que cresce rapidamente com a energia, e assim,
β>0
T > 0.
e
De fato, mostramos que
Ω(E) ∝ E f
assim,
ln Ω(E) ∝ f ln E + constante
e
o que nos permite escrever para E = Ē ≈ E
1
f
=β≡
kT
Ē
∴
kT =
Ē
f
o que nos permite dizer que a temperatura é uma medida grosseira da energia média, acima do estado fundamental,
por grau de liberdade.
Para dois sistemas em equilíbrio (com a mesma temperatura) esta condição equivale a dizer que os corpos
compartilham a energia total de modo que Ē/f é a mesma para ambos. Também podemos inferir o sentido do
fluxo de calor entre dois corpos interagentes através da temperatura. Para isso, usamos a equação para a entropia
máxima:
S(Ēf ) + S ′ (Ēf′ ) ≥ S(Ēi ) + S ′ (Ēi′ )
ou ainda,
S(Ēf ) − S ′ (Ēi′ ) ≈
∂S(Ēi )
(Ēf − Ēi )
∂ Ē
CAPÍTULO 3. TERMODINÂMICA ESTATÍSTICA
84
e o mesmo vale para a variável com linha. Então temos:
∂S ′ (Ēi′ ) ′
∂S(Ēi )
(Ēf − Ēi ) +
(Ēf − Ēi′ ) ≥ 0
∂ Ē
∂ Ē ′
logo,
∂ ln Ω(Ēi )
∂ ln Ω′ (Ēi′ ) ′
(Ēf − Ēi ) +
(Ēf − Ēi′ ) ≥ 0
∂ Ē
∂ Ē ′
e usando as definições feitas previamente, temos que:
βi Q + βi′ Q′ ≥ 0
e levando em consideração o princípio da conservação da energia, temos que Q + Q′ = 0, o que nos permite
eliminar o calor Q′ da equação acima:
(βi − βi′ )Q ≥ 0
e se consideramos que Q > 0, temos que:
βi > βi′
o que implica em
Ti′ ≥ Ti .
3.2.4
Reservatório de Calor
Vamos considerar agora a interação térmica entre dois sistemas interagentes A e A′ considerando que o sistema A′
é muito maior do que o sistema A. Dizemos que o sistema A′ é um reservatório de calor ou banho térmico com
respeito ao sistema menor. Se A′ é tão grande, a temperatura permanece inalterada independente da quantidade de
calor Q′ absorvido do sistema menor. De acordo com livro-texto, esta condição pode ser explicitada na forma1 :
∂β ′ ′
Q ≪ β′
∂E ′
1
(3.18)
Esta condição vem da hipótese de que o parâmetro β não muda muito quando uma quantidade de calor Q′ é absorvida, assim,
escrevemos
β ′ (E ′ + Q′ ) − β ′ (E ′ ) ≪ β ′ (E ′ )
e expandindo o primeiro membro em torno da quantidade de calor Q′ (que consideramos ser muito pequena em relação à energia do
reservatório), podemos escrever
β ′ (E ′ + Q′ ) − β ′ (E ′ ) ≈
∂β ′ ′
Q
∂E ′
3.2. INTERAÇÃO ENTRE SISTEMAS MACROSCÓPICOS
85
que indica que a variação da temperatura com a energia é muito pequena. Isto ocorre porque a quantidade de calor
é muito pequena comparada com o valor médio da energia Ē ′ do reservatório (sistema A′ ).
Com efeito,
∂β ′
∂
=
′
∂E
∂E ′
(
∂ ln Ω′
∂E ′
)
∂2
=
∂(E ′ )2
(
f′
E′
)
o que nos permite escrever
∂β ′
f′
β′
∼ ′2 = ′ .
′
∂E
E
E
Além disso, Q′ é da ordem da energia média do sistema A, assim,
∂β ′ ′
β′
Q
∼
E ≪ β′
∂E ′
E′
onde usamos a condição de A′ ser um reservatório de calor. Da relação acima, obtemos uma condição auxiliar
E
≪1
E′
quando A′ é muito maior do que A.
Vamos agora considerar a variação do número de estados acessíveis do reservatório com a adição de calor
referente ao sistema A, assim,
(
)
∂ ln Ω′
1
ln Ω′ (E ′ + Q) = ln Ω′ (E ′ ) +
Q′ +
′
∂E
2
(
)
∂ 2 ln Ω′
Q′2 + · · ·
∂(E ′ )2
e aplicando a condição dada pela Eq. (3.18), podemos desprezar os termos de segunda ordem e superiores, temos:
ln Ω′ (E ′ + Q) − ln Ω′ (E ′ ) ∼ β ′ Q′
e multiplicando pela constante k, segue que
k ln Ω′ (E ′ + Q) − k ln Ω′ (E ′ ) ∼ kβ ′ Q′
e usando T ′ = 1/kβ ′ e a definição da entropia dada pela Eq. (3.7), obtemos ainda:
∆S ′ ∼
Q′
T′
variação da entropia p/ um reservatório térmico.
(3.19)
o que nos permite expressar a condição na forma:
∂β ′ ′
Q ≪ β ′ (E ′ ).
∂E ′
No caso do calor ser cedido por A′ , teríamos um sinal negativo multiplicando a derivada. Esta é a razão de ser usado o módulo na Eq.
(3.18).
CAPÍTULO 3. TERMODINÂMICA ESTATÍSTICA
86
Uma relação similar se mantém para qualquer sistema a uma temperatura T que absorve uma quantidade
infinitesimal de calor dQ.
¯ Neste caso, temos:
ln Ω′ (E ′ +dQ)
¯ − ln Ω′ (E ′ ) =
∂ ln Ω ′
dQ
¯
dQ
¯ = β dQ
¯ =
∂E
kT
(3.20)
isto implica em
dS =
dQ
¯
,
T
válido para qualquer sistema.
(3.21)
Note que a Eq. (3.21) é válida independentemente do tamanho do sistema desde que a quantidade de calor
trocada seja infinitesimal.
3.2.5
Análise de largura da distribuição de probabilidades
Aqui desejamos determinar a largura da distribuição de probabilidades P (E). Para isso, vamos investigar a distribuição em torno do ponto máximo, assim, definimos:
e
η = E − E.
Expandindo ln Ω(E) em torno do máximo, segue que
e +
ln Ω(E) = ln Ω(E)
e
e
1 ∂ 2 ln Ω(E)
∂ ln Ω(E)
η+
η2 + · · ·
∂E
2
∂E 2
e Usando as definições:
onde as derivadas são calculadas no ponto E.
e
∂ ln Ω(E)
∂E
e
∂ 2 ln Ω(E)
∂β
λ≡−
=−
∂E 2
∂E
β=
podemos escrever
e + βη − 1 λη 2 + · · · .
ln Ω(E) = ln Ω(E)
2
(3.22)
e ′ . Notando ainda que:
Podemos fazer o mesmo para o sistema A′ expandindo em torno de E
e ′ = E (0) − E − (E (0) − E)
e =E
e − E = −(E − E)
e = −η
E′ − E
podemos fazer a expansão para o sistema A′ :
e ′ ) − β ′ η − 1 λ′ η 2 + · · · .
ln Ω′ (E ′ ) = ln Ω′ (E
2
(3.23)
3.2. INTERAÇÃO ENTRE SISTEMAS MACROSCÓPICOS
87
Somando as duas equações obtemos:
e ′ ) + ln Ω(E)
e + βη − β ′ η − 1 λ′ η 2 − 1 λη 2 + · · · .
ln Ω(E) + ln Ω′ (E ′ ) = ln Ω′ (E
2
2
ou ainda
e ′ )Ω(E)]
e + (β − β ′ )η − 1 (λ′ + λ)η 2 + · · · .
ln[Ω(E)Ω′ (E ′ )] = ln[Ω′ (E
2
Já discutimos que o produto Ω(E)Ω′ (E ′ ) é igual ao número de estados acessíveis do sistema combinado A(0)
que, por sua vez, é proporcional a probabilidade de encontrar o sistema A com energia E. Assim, podemos
escrever diretamente:
e + (β − β ′ )η − 1 (λ′ + λ)η 2 + · · · .
ln P (E) = ln P (E)
2
e desprezando os termos além de segunda ordem e considerando que no equilíbrio β = β ′ então escrevemos:
e −λ0 η
P (E) = P (E)e
2 /2
,
onde definimos
λ0 = λ′ + λ
(3.24)
ou, explicitamente,
e
e − 2 λ0 (E−E) .
P (E) = P (E)e
1
2
(3.25)
Note que λ0 não pode ser negativo pois P (E) deve ter um máximo (ou, de maneira equivalente, não teríamos
e de equilíbrio). Além disso, podemos escolher A′ muito pequeno tal que λ ∼ λ0 . Como λ0 ≥ 0,
um valor de E
λ também deve ser positivo. Argumento similar pode ser aplicado para o caso do sistema A onde chegamos à
conclusão de que λ ≥ 0.
Considere agora que Ω guarda a seguinte relação de proporcionalidade:
Ω ∝ Ef
onde f é o número de graus de liberdade do sistema. Segue então que a segunda derivada de ln Ω é dada por
∂ 2 ln Ω
f
∝− 2
2
∂E
E
e, como
λ=−
∂ 2 ln Ω
∂E 2
então
λ ≥ 0.
e Agora,
Havíamos argumentado que a distribuição de probabilidades P (E) tinha um valor máximo para E = E.
demonstramos que P (E) é uma distribuição Gaussiana cujo valor médio pode ser obtido comparando com a sua
definição geral obtida no capítulo 1. Assim, o valor médio é realmente dado por
e
Ē = E
CAPÍTULO 3. TERMODINÂMICA ESTATÍSTICA
88
ou seja, a média é realmente o valor de máxima probabilidade no equilíbrio. Adicionalmente, P (E) decresce rapi−1/2
e 2 /2 ≫ 1, ou seja, |E − E|
e ≫λ
damente com E, conforme λ0 (E − E)
0
. De forma mais concreta, é improvável
e + ∆∗ E, onde (novamente comparando com os resultados do
que a energia do sistema seja muito maior do que E
capítulo 1),
−1/2
∆∗ E = λ0
.
Considere que λ ≫ λ′ tal que λ ∼ λ0 e assim,
λ0 ∼ λ =
f
e2
E
=
f
Ē 2
assim, podemos obter uma relação explícita para o desvio da média da distribuição de probabilidade:
Ē
∆∗ Ē = √
f
o que implica na largura fracional dada por:
∆∗ Ē
1
=√ .
f
Ē
Se temos um mol de partículas, então podemos dizer que f ∼ Na ∼ 1024 então ∆∗ Ē/Ē ∼ 10−12 .
Vemos então que a largura da distribuição é extremamente pequena, resultado de estarmos lidando com um
número gigantesco de partículas (Ex. Se Ē =1 J então ∆∗ Ē/Ē ∼ 10−12 J). Além disso, note que P (E) se
torna desprezível quando o valor de E difere de seu valor médio em 1/1012 !! Isto é verdadeiro em sistemas
macroscópicos, então não precisamos nos preocupar com flutuações dos valores da energia em torno da média.
Porém, se lidamos com sistemas muito pequenos, precisamos determinar de maneira precisa o maior número
possível dos momentos da distribuição de probabilidades.
A condição λ > 0 implica em
λ=−
∂ 2 ln Ω
∂β
=−
≥0
2
∂E
∂E
∴
∂β
≤0
∂E
e substituindo-se β = 1/kT , segue que
∂β
∂
=
∂E ∂E
(
1
kT
)
=−
1 ∂T
≤0
kT 2 ∂E
∂T
≥ 0.
∂E
A Eq. (3.26) apresenta um resultado importante: a temperatura sempre aumenta com a energia.
(3.26)
3.3. INTERAÇÃO GERAL ENTRE SISTEMAS MACROSCÓPICOS
3.3
89
Interação Geral entre Sistemas Macroscópicos
Estudamos em detalhes a interação térmica entre sistemas. Vamos agora considerar o caso geral onde os sistemas
interagem também mecanicamente, ou seja, os parâmetros externos também são livres para mudar. Neste caso,
como já discutimos, o espectro do sistema também muda. Vamos verificar o comportamento dos estados acessíveis
ao sistema com a variação destes parâmetros externos.
3.3.1
Dependência da densidade de estados com os parâmetros externos
Por simplicidade, consideramos apenas o caso em que temos apenas um parâmetro externo variável, que chamaremos de x. O número total de estados acessíveis ao sistema no intervalo entre E e E + δE também depende de
x, assim, escrevemos o número total de estados neste intervalo como Ω(E, x). A questão é saber como Ω depende
de x.
Quando o parâmetro externo muda de x para x + dx, a energia de cada microestado Er (x) muda por
dEr =
∂Er (x)
dx ≡ Y dx
∂x
(3.27)
onde definimos Y = ∂E(x)/∂x. Vemos então que a mesma variação de dx produz variações distintas para diferentes estados, em outras palavras, Y = Yr . Assim, precisamos contar os estados levando-se em conta as diferentes
variações da energia. Para isso, consideramos que os possíveis valores de Y podem ser subdivididos em intervalos
dY .
Vamos considerar que temos um subconjunto de estados ΩY (E, x) tal que o valor da derivada Y tem valor
entre Y e Y + dY . Este subconjunto tem a propriedade de que todos os estados sofrem a mesma mudança de
energia δE quando x muda para x + dx. Assim, todos os estados localizados em um estado Y dx abaixo de E
mudam para um valor maior do que E. Assim, o número destes estados pode ser calculado por
σY (E) =
ΩY (E, x)
Y dx.
δE
(3.28)
O número total de estados σ(E) que muda de um valor menor para um valor maior do que E será:
σ(E) =
∑
σY (E) =
Y
∑ ΩY (E, x)
Y
δE
Y dx.
o que pode ser escrito na forma
σ(E) =
Ω(E, x)
Ȳ dx,
δE
(3.29)
CAPÍTULO 3. TERMODINÂMICA ESTATÍSTICA
90
onde a média da derivada Ȳ é escrita na forma,
Ȳ =
∑
1
Y ΩY (E, x)
Ω(E, x) Y
(3.30)
Notamos ainda que:
Ȳ =
∂Er
= −X̄
∂x
onde identificamos o valor médio de Y como sendo o negativo da força generalizada conjugada ao parâmetro
externo x.
Aqui vale um comentário final sobre o significado de σ(E): é o número total de estados, entre todos os estados
Ω(E, x), cuja energia muda de um valor menor do que E para um valor maior do que E quando o parâmetro
externo muda de x para x + dx.
Resta agora determinar como varia Ω(E, x) com x para um dado valor de E. Sabemos que a variação do
número de estados neste intervalo de energia é dado por:
o de estados que entram no intervalo
o de estados que deixam este intervalo
n
n
∂Ω(E, x)
dx =
−
.
∂x
desde um valor menor do que E
para um valor maior do que E
Em símbolos, podemos escrever:
[
]
∂Ω(E, x)
∂σ
∂σ
dx = σ(E) − σ(E + δE) = σ(E) − σ(E) +
(E + δE − E) = −
δE
∂x
∂E
∂E
e substituindo-se σ da Eq. (3.29), obtemos:
∂
∂Ω(E, x)
dx = −
∂x
∂E
(
)
Ω(E, x)
Ȳ dx δE
δE
∂Ω
∂(ΩȲ )
dx = −
dx
∂x
∂E
logo,
∂Ω
∂ Ȳ
∂Ω
= −Ω
− Ȳ
∂x
∂E
∂E
o que pode ser reescrito na forma:
1 ∂Ω
∂ Ȳ Ȳ ∂Ω
=−
−
Ω ∂x
∂E Ω ∂E
3.4. EQUILÍBRIO ENTRE SISTEMAS INTERAGENTES
91
∂ ln Ω
∂ ln Ω ∂ Ȳ
= −Ȳ
−
.
∂x
∂E
∂E
Temos que Ω ∝ E f o que nos permite inferir que a derivada do logaritmo é proporcional ao número de graus
de liberdade, i.e., ∂ ln Ω/∂E ∝ f /E, logo, o primeiro termo é da ordem de f Ȳ /E. O segundo termo é da ordem
de ∂ Ȳ /∂E ∝ Ȳ /E, e assim, como f ∼ 1024 o segundo termo é muito menor do que o primeiro termo por um fator
mínimo da ordem do número de Avogadro. Com isso, podemos escrever como uma excelente aproximação
∂ ln Ω
∂ ln Ω
= −Ȳ
= β X̄
∂x
∂E
onde identificamos a variável β e a força generalizada X̄ = −Ȳ .
No caso de N parâmetros externos, então Ω = Ω(E; x1 , x2 , · · · , xN ) e a generalização para este caso é direta:
(
3.4
∂ ln Ω
∂xα
)
= β X̄α ,
α = 1, 2, 3, · · · , N.
(3.31)
E
Equilíbrio entre Sistemas Interagentes
Considere agora o caso geral onde os dois sistemas A e A′ estão interagindo via troca de calor e/ou realizando trabalho um sobre o outro. Neste caso, o macroestado do sistema A é especificado pela energia E e pelos parâmetros
externos x1 , x2 , · · · , xN ; A′ é caracterizado pela energia E ′ e pelos parâmetros x′1 , x′2 , · · · , x′N .
O sistema combinado A(0) é novamente constituído pelos dois sistemas A e A′
A(0) = A + A′
e como consideramos que está completamente isolado, podemos escrever:
E (0) = E + E ′ = constante,
o que nos permite determinar a energia do sistema A′ a partir do cálculo da energia do sistema A. A novidade
agora é que os parâmetros externos do sistema A′ também podem ser expressos em termos dos parâmetros do
sistema A.
O número de estados acessíveis do sistema combinado será Ω(0) = Ω(0) (E; x1 , x2 , · · · , xN ) e terá um valor
e e xα = x
eα . O estado de equilíbrio será caracterizado
máximo para um conjunto específico de valores, i.e., E = E
eex
eα . Os valores médios destas quantidades
pela máxima probabilidade do sistema A ter valores próximos de E
e e x̄α = x
eα .
no equilíbrio serão iguais a Ē = E
CAPÍTULO 3. TERMODINÂMICA ESTATÍSTICA
92
3.4.1
Processos quasi-estáticos
Qual é variação no número de estados acessíveis quando o sistema A, devido à interação com A′ , é trazido (de
modo quasi-estático) do estado de equilíbrio descrito por Ē e x̄α , (α = 1, 2, 3 · · · , N ) para um estado descrito por
Ē + dĒ e x̄α + dx̄α . Assim, podemos escrever:
N
∑
∂ ln Ω
∂ ln Ω
dx̄α
dĒ +
∂ x̄α
∂ Ē
α=1
d ln Ω =
e usando as definições prévias escrevemos
d ln Ω = βdĒ +
N
∑
[
β X̄α dx̄α = β dĒ +
α=1
Aqui devemos reconhecer que a soma
N
∑
]
X̄α dx̄α .
α=1
∑N
α=1 X̄α dx̄α
é simplesmente igual ao trabalho realizado pelo sistema,
i.e.,
dW
¯ =
N
∑
X̄α dx̄α
α=1
algo que já havíamos definido nos capítulos anteriores2 .
Substituindo-se na diferencial d ln Ω, obtemos
[
]
d ln Ω = β dĒ +dW
¯
= β¯
dQ
onde fizemos uso da primeira lei da termodinâmica dE =dQ
¯ −dW
¯ . Agora, lembramos que:
β dQ
¯ =
dQ
¯
kT
e
S = k ln Ω
o que nos leva a escrever
T dS = dĒ +dW
¯ =dQ
¯
(3.32)
A Eq. (3.32) nos mostra que a relação dQ
¯ = T dS permanece válida mesmo na presença de trabalho quando o
processo é quasi-estático.
Vemos então que no caso particular em que os sistemas não trocam calor, dQ
¯ = 0, a entropia permanece
constante mesmo com as variações dos demais parâmetros externos xα , i.e.,
dS = 0,
processo quasi-estático, na ausência de calor.
Para reforçar escrevemos abaixo:
2
Aqui é muito conveniente revisar os capítulos anteriores se este ponto não ficou claro.
(3.33)
3.4. EQUILÍBRIO ENTRE SISTEMAS INTERAGENTES
93
Se os parâmetros externos de um sistema térmicamente isolado forem variados de modo
quasi-estático por qualquer quantidade,
∆S = 0.
Com isso, concluímos que um processo quasi-estático é um processo reversível, de acordo com a segunda lei
da termodinâmica.
3.4.2
Condições de equilíbrio
Vamos considerar um caso simples em que os parâmetros externos são V e V ′ para A e A′ . O número de estados
acessíveis para o sistema combinado é dado pelo produto
Ω(0) (E, V ) = Ω(E, V )Ω′ (E ′ , V ′ )
e tomando o logaritmo, temos ainda:
ln Ω(0) (E, V ) = ln Ω(E, V ) + ln Ω′ (E ′ , V ′ )
o que nos permite escrever,
S (0) = S + S ′ .
O valor máximo ocorre quando d ln Ω(0) = 0, para E e V sendo os parâmetros variáveis. Seja,
d ln Ω(0) = d ln Ω + d ln Ω′
então temos:
∂Ω
∂Ω
∂Ω′ dE ′
∂Ω′ dV ′
dE +
dV +
dE +
dV = 0.
′
∂E
∂V
∂E dE
∂V ′ dV
(3.34)
Agora invocamos a condição E (0) = E + E ′ = constante e V (0) = V + V ′ = constante, o que nos permite
escrever
dE ′ d(E (0) − E)
=
= −1
dE
dE
e
dV ′ d(V (0) − V )
=
= −1
dV
dV
e voltando à condição de equilíbrio dada pela Eq. (3.34) segue que:
∂Ω
∂Ω′
∂Ω′
∂Ω
dE +
dV −
dE −
dV = 0.
′
∂E
∂V
∂E
∂V ′
(3.35)
CAPÍTULO 3. TERMODINÂMICA ESTATÍSTICA
94
Aqui precisamos notar que as derivadas são os parâmetros já definidos. Em particular, as derivadas de ln Ω e
ln Ω′ em relação ao volume são simplesmente as forças generalizadas conjugadas ao volumes V e V ′ multiplicadas
pelo parâmetro β. A força generalizada que provoca a variação no volume é simplesmente a pressão média p̄,
assim, reconhecendo o parâmetro β, a Eq. (3.35) toma a forma:
βdE + β p̄dV − β ′ dE − β ′ p̄′ dV = 0.
(β − β ′ )dE + (β p̄ − β ′ p̄′ )dV = 0
(3.36)
de onde retiramos duas condições que devem ser satisfeitas para que A e A′ estejam em equilíbrio:
β = β′
(3.37)
β p̄ = β ′ p̄′
mas se a primeira condição é satisfeita a segunda toma a forma mais simples:
p̄ = p̄′ .
(3.38)
As Eqs. (3.37) e (3.38) revelam uma física muito simples: se os sistemas A e A′ são dois reservatórios
preenchidos com gás com uma parede diatérmica cuja posição é variável (um pistão, essencialmente), então a
situação de equilíbrio irá ocorrer quando os reservatórios estiverem à mesma temperatura e a parede ficará parada
em uma certa posição de modo que a pressão sobre ela seja nula (as pressões exercidas pelos gases de A e A′ são
iguais.).
3.4.3
Propriedades da Entropia
A entropia é uma quantidade que nos fornece uma medida do número de estados acessíveis ao sistema. De fato,
foi definida como S = ln Ω. Quando adicionamos uma quantidade de energia em um sistema ou uma quantidade
de partículas, enfim, quando efetuamos qualquer mudança sobre um sistema, causamos uma desordem que é
mensurada através das possíveis configurações do sistema. Quanto maior a configuração do sistema, maior é a
desordem, e em última análise, maior será a sua entropia. Assim, em geral nos referimos a entropia como uma
quantidade que mede a desordem do sistema. Abaixo relacionamos algumas propriedades da entropia que serão
úteis nos estudos subseqüentes.
3.4. EQUILÍBRIO ENTRE SISTEMAS INTERAGENTES
95
A entropia é uma diferencial exata
Sabemos que o calor depende do modo como levamos um sistema de um macroestado inicial a um macroestado
final. Em termos matemáticos, dizemos que o calor não é representado por uma diferencial exata. No entanto,
quando determinamos a relação entre entropia e calor, chegamos à relação,
dS =
dQ
¯
.
T
Embora a diferencial da entropia seja diferente do calor apenas pelo fator 1/T , a entropia é uma diferencial
exata. Em outras palavras, a entropia é uma quantidade que independe do processo termodinâmico que leva o
sistema de um estado inicial a um estado final. Assim, podemos escrever:
∆S = Sf − Si =
∫
f dQ
¯
i
T
válido para qualquer sistema que é levado de um estado inicial a um estado final através de um processo quasiestático.
Definição Estatística
A definição estatística da entropia dada por
S = k ln Ω
implica que a entropia tem um valor absoluto, i.e., a entropia é diferente, por exemplo, da energia interna que
só tem sentido quando falamos em sua variação ou em seu valor em relação à algum referencial. Com efeito, a
entropia pode sempre ser determinada através da relação S = k ln Ω para um dado conjunto de parâmetros externos.
É importante notar que isto é também uma conseqüência da teoria da Mecânica Quântica desde que a Mecânica
Clássica nos permite conhecer a entropia a menos de uma constante. Para este ponto ficar claro, lembre-se que o
número de estados acessíveis é obtido classicamente através do volume do espaço de fase, i.e.,
Ω(E) =
1
hf0
∫
E+δE ∫
E
dr1 · · ·
∫
∫
drN
dp1 · · ·
∫
dpN
que é simplesmente a razão do volume do espaço de fase pelo volume de uma célula deste espaço dada por hf0 .
Assim, a entropia será
[∫
E+δE ∫
S = ln
E
dr1 · · ·
∫
∫
drN
dp1 · · ·
∫
]
dpN − kf ln h0
e como em Mecânica Clássica h0 é arbitrário, a entropia é conhecida a menos de um valor constante. Na teoria
Quântica, o volume da célula do espaço de fase não é arbitrária mas fixada pela constante de Planck (h = 6, 63 ×
10−34 J.s), através do princípio da incerteza de Heisenberg.
CAPÍTULO 3. TERMODINÂMICA ESTATÍSTICA
96
Comportamento Limite
De acordo com a Mecânica Quântica, quando a energia de qualquer sistema é reduzida, chegamos a um valor
mínimo de energia que chamamos de estado fundamental, denotado por E0 . Em geral, este estado fundamental
é único (embora existam casos em que o estado fundamental possa ser degenerado). Assim, a entropia que é
proporcional ao número de estados, ou é reduzida à zero ou a um valor mínimo também. Por outro lado, quando
a energia do sistema é elevada, a entropia cresce muito rapidamente pois é proporcional ao número de graus de
liberdade do sistema. Com efeito, como Ω ∝ E f então S = k ln Ω ∝ kf ln E
Assim, podemos resumir o comportamento da entropia da seguinte forma:
S ∼ kf,
se
E ≫ E0
e
S → 0,
se
E → E0 .
(
)
∂T
> 0 . Como con∂E
seqüência disso, podemos dizer que a temperatura do sistema diminui quando a energia do sistema é reduzida em
Notamos que a derivada da temperatura com respeito à energia é sempre positiva
direção ao estado fundamental. Assim, a condição da entropia ser reduzida a um valor mínimo (ou zero), pode ser
escrita na forma:
S → 0,
se
T → 0.
Na prática, nunca conseguimos atingir a temperatura nula, ou como chamamos, o “zero absoluto". Assim,
podemos chegar em temperaturas da ordem de . 10−3 K mas nunca exatamente no zero. Assim, a entropia nunca
chega a um valor nulo mas sempre tende a um valor residual. Este valor residual pode ser atribuído aos spins dos
núcleos atômicos que têm uma energia de interação muito pequena de modo que mesmo uma perturbação muito
pequena pode modificar suas orientações. Assim, na prática, dizemos que a entropia tende a um valor S0 residual
à medida que a temperatura é reduzida ao mínimo experimental. Por esta razão, reescrevemos a condição acima
em uma forma mais realística:
S → S0 ,
se
T → 0+ .
(3.39)
onde denotamos 0+ por uma temperatura muito próxima de zero.
A Eq. (3.39) é muito importante e expressa a chamada terceira lei da termodinâmica que nos diz que em
T ∼ 0 a entropia assume um valor constante independente do sistema considerado.
3.5. CÁLCULO ESTATÍSTICO DE QUANTIDADES TERMODINÂMICAS
3.5
97
Cálculo Estatístico de Quantidades Termodinâmicas
Vamos considerar agora como o conhecimento dos estados acessíveis Ω = Ω(E; x1 , x2 , · · · , xN ) nos permite determinar quantidades termodinâmicas. Vimos neste capítulo que
β=
∂ ln Ω
∂E
X̄α =
e
1 ∂ ln Ω
.
β ∂xα
Estas relações são fundamentais pois nos permitem determinar a temperatura absoluta e a força generalizada do
sistema associada à variável xα . Adicionalmente, a partir destas relações podemos obter equações que conectam as
diversas variáveis do sistema, que chamamos de equações de estado. As equações de estado são muito interessantes
pois podem ser verificadas experimentalmente.
Como já discutimos o comportamento do número de estados acessíveis para um gás ideal, vamos exemplificar
aqui a aplicação destas equações neste caso simples porém muito importante da Termodinâmica. No caso de
xα = V , a força generalizada é dada por Xα = p̄, assim, temos que:
p̄ =
1 ∂ ln Ω
β ∂V
(3.40)
o que nos permite determinar a função p̄ = p̄(V, T ) que é essencialmente a equação de estado que procuramos.
Nas aulas anteriores, mostramos que para um gás ideal Ω era dada por:
Ω ∝ V N χ(E)
onde V é o volume do gás constituído por N moléculas e com energia E. Tomando o logaritmo desta expressão,
segue que:
ln Ω = N ln V + ln χ(E) + constante.
Substituindo-se a Eq. (3.41) em (3.40), segue que
p̄ =
1 ∂
[N ln V + ln χ(E) + constante.]
β ∂V
p̄ =
1N
βV
desde que o segundo e terceiro termos são nulos. Assim, como β = 1/kT , temos ainda
p̄ = kT
N
V
(3.41)
CAPÍTULO 3. TERMODINÂMICA ESTATÍSTICA
98
ou ainda,
p̄V = N kT.
Podemos expressar o número de moléculas em termos do número n de moles. Assim, temos que:
N = nNa
onde Na é o número de Avogadro. A equação de estado pode ser escrita como:
p̄V = nNa kT.
e definindo
R = kNa
que é chamada constante dos gases ideais, obtemos o resultado final:
p̄V = nRT.
(3.42)
É importante notar que a Eq. (4.16) não depende do tipo de molécula de que o gás ideal é formado. Assim,
um gás ideal tem um comportamento universal determinado pela lei dos gases ideais definida acima.
Resta ainda, aplicar a equação β = ∂ ln Ω/∂E, assim, usando Eq. (3.41), chegamos a
β=
∂ ln χ(E)
∂E
que é um resultado muito importante pois χ(E) depende apenas da energia. Assim, se invertemos a relação acima,
poderíamos escrever a energia do gás como função da temperatura, i.e.,
Ē = Ē(T ).
(3.43)
Assim, vemos que a energia do gás depende apenas da temperatura do gás. Se, por exemplo, dobramos o
volume do sistema não modificamos a energia cinética das partículas, apenas aumentamos a separação entre elas.
É importante lembrar que no caso de um gás ideal não temos interação entre as moléculas o que nos permite chegar
à Eq. (3.43).
Capítulo 4
Termodinâmica e suas aplicações
Agora que já descrevemos a Física Estatística e já temos estabelecido sua conexão com a Termodinâmica, vamos
considerar algumas aplicações clássicas das leis da termodinâmica bem como a descrição das medidas das grandezas básicas definidas anteriormente. Notamos ainda que todas as discussões que serão realizadas serão restritas
à sistemas em equilíbrio.
4.1
Grandezas Extensivas e Intensivas
Os parâmetros que caracterizam um sistema do ponto de vista termodinâmico podem ser classificados como extensivos e intensivos, dependendo de sua relação com o tamanho do sistema sob consideração. Para tornar este
ponto mais claro, considere um sistema dividido em 2 partes e denote por y1 e y2 os valores do parâmetro externo
para cada um dos subsistemas. Temos então duas possibilidades:
(a) y = y1 + y2 , i.e., o parâmetro y que caracteriza o sistema total é a soma dos parâmetros que caracteriza cada
uma das partes do sistema, neste caso dizemos que o parâmetro y é extensivo;
(b) y = y1 = y2 , i.e., o parâmetro y é independente do tamanho do sistema e dizemos então que y é um parâmetro
intensivo.
Já vimos exemplos de grandezas intensivas e extensivas nos capítulos anteriores. Exemplos de grandezas
intensivas são a temperatura, pressão, densidade ρ = M/V , calor específico, etc; grandezas extensivas são energia,
volume, massa, entropia, capacidade térmica, etc. Quando queremos trabalhar com grandezas extensivas mas de
maneira a não depender do tamanho do sistema, definimos a “densidade desta grandeza", e.g., podemos definir
uma entropia per mole s = S/n, com n sendo o no de moles, etc.
99
CAPÍTULO 4. TERMODINÂMICA E SUAS APLICAÇÕES
100
Considere agora um sistema dividido em dois subsistemas, A e A′ . Se temos dois gases separados uma partição
cuja posição é variável, então o estado de equilíbrio é caracterizado pela igualdade da temperatura e pressão dos
sistemas. Tanto a pressão como a temperatura são as mesmas em todos os pontos do reservatório que contém os
gases, ou seja, são definidas pontualmente. Por outro lado, a energia total é dada pela soma das energias cinéticas
de todas as moléculas dos gases. Desta forma, a energia depende da quantidade dos gases dentro do reservatório.
4.2
Parâmetros Macroscópicos e suas medidas
Aqui vamos considerar como parâmetros macroscópicos são determinados em um experimento. Um idéia de como
isto é realizado é fundamental para qualquer desenvolvimento de física teórica cujo objetivo é justamente descrever
resultados experimentais.
4.2.1
Trabalho e Energia Interna
O trabalho pode ser facilmente determinado uma vez que os parâmetros externos e as forças generalizadas podem
ser facilmente medidas. Exemplo: no caso de um pistão em que o gás varia o seu volume de Vi até Vf , a pressão
média tendo valor mensurável p̄(V ), temos então:
∫
Wif =
Vf
p̄(V ) dV.
(4.1)
Vi
A medida da energia interna Ē de um sistema pode ser reduzida à medida de um trabalho macroscópico. Com
efeito, para um sistema termicamente isolado Q = 0 e assim:
∆Ē = −W
ou seja,
Ēf − Ēi = −Wif = −
∫
Vf
p̄(V ) dV.
Vi
Somente diferenças de energia interna tem sentido físico, assim, podemos definir qualquer macroestado i como
tendo energia nula, i.e., Ēi = 0. A energia final Ēf é definida com respeito à Ēi = 0. Agora, como o valor final
Ēf independente do caminho, segue que:
Ēf − Ēi = −Wif = Wf i .
Note que embora Wf i ainda é uma quantidade que depende do caminho, o que ocorre é que fixamos os ponto
inicial e final.
4.2. PARÂMETROS MACROSCÓPICOS E SUAS MEDIDAS
4.2.2
101
Calor
O calor Qif absorvido pelo sistema que vai um macroestado i a um macroestado final f é definido por
Qif = Ēf − Ēi + Wif
(4.2)
onde Wif é trabalho realizado pelo sistema . Como sabemos medir a energia interna e o trabalho, então Qif pode
ser determinado indiretamente através da Eq. (4.2).
Medida direta em termos do trabalho
Suponha que pretendemos medir o calor Qif absorvido pelo sistema A com seus parâmetros externos fixos, com
isso, A não pode realizar trabalho. Podemos trazer A em contato térmico com um segundo sistema sobre o qual
trabalho pode ser feito. Um exemplo, seria imergir um resistor na substância a ser medida conectado a uma bateria
externa. Fazendo trabalho W sobre o resistor, levamos A de um macroestado i para um macroestado f . Se o
resistor e o sistema A estão isolados, segue que:
W = ∆Ē + ∆ε̄,
(a) ∆Ē é a variação da energia interna do sistema A;
(b) ∆ε̄ é a variação da energia interna do resistor.
Mas como A não realiza trabalho então ∆Ē = Qif e, portanto,
Qif = W − ∆ε̄
e como em geral, ∆ε̄ ≪ ∆Ē podemos desprezar a variação da energia interna do resistor; podemos também
considerar que ∆ε̄ possa ser determinado previamente através de algum parâmetro externo intrínseco do resistor.
Método da Comparação (ou método das misturas)
Mantendo-se os parâmetros externos fixos, trazemos A em contato térmico com um sistema de referência B cuja
energia interna é conhecida como função de seus parâmetros externos. Nenhum trabalho é realizado no processo.
A conservação da energia implica que
∆ĒA + ∆ĒB = 0
ou ainda,
QA + QB = 0
CAPÍTULO 4. TERMODINÂMICA E SUAS APLICAÇÕES
102
ou
QA = −QB
e como QB = −∆ĒB , que é conhecido para o sistema B, então o calor absorvido pelo sistema A está completamente determinando.
4.2.3
Temperatura Absoluta
Agora vamos considerar a determinação da temperatura absoluta em termos operacionais. Comparado a um parâmetro temperatura arbitrário, a temperatura absoluta tem as seguintes características:
(a) é completamente independente do termômetro utilizado;
(b) é um parâmetro de significado fundamental entrando em todas as equações teóricas.
Qualquer relação teórica envolvendo T pode ser usada como base para a sua determinação experimental.
Temos dois tipos de relações:
(a) relações envolvendo aspectos microscópicos da teoria. Com o uso da Física Estatística podemos determinar
as equações de estado relacionando T com variáveis macroscópicas;
(b) relações macroscópicas, como a 2a lei da termodinâmica, que nos permite relacionar a variação da entropia
com o calor e a temperatura, dS =dQ/T
¯
.
O uso mais elementar do item (a) é a lei dos gases ideais:
pV = nRT
onde n é o número de moles do gás. Note que para T constante, a lei dos gases ideais se reduz a
pV = constante.
ou seja, temos várias hipérboles no digrama p − V caracterizadas por diferentes valores de temperatura.
Se o volume do gás ideal é mantido constante, então a pressão p e a temperatura T são proporcionais. Com um
par de valores de pressão e temperatura podemos determinar o valor da constante de proporcionalidade k. Com
este valor determinado podemos medir qualquer valor de temperatura a partir da pressão do sistema. A convenção
utilizada é o ponto triplo da água que é facilmente reproduzido experimentalmente. Convencionamos definir a
temperatura do ponto triplo Tt como
Tt = 273, 16 exatamente.
4.3. CALOR ESPECÍFICO E CAPACIDADE TÉRMICA
103
Sendo pt a pressão do ponto triplo, então a equação gases ideais fornece:
pt V = nRTt
e para um gás ideal qualquer com n moles ocupando um volume V podemos calcular o valor da constante R pois
conhecemos o valor de pt . O valor obtido, que independente do tipo de gás, é dado por:
R = (8, 3143 ± 0, 0012) J/mol.K
e desde que sabemos o número de Avogadro Na = 6, 02252 ± 0, 0028 × 1023 molec./mol, então podemos determinar a constante k
k ≡ kB = R/Na = (1, 38054 ± 0, 00108) × 10−16 ergs/K.
A escala de temperatura Celsius, muito utilizada no Brasil, está relacionada com a temperatura absoluta pela
equação:
θ = T − 273, 15.
4.3
Calor Específico e Capacidade Térmica
Considere um sistema macroscópico caracterizado por sua temperatura T e seus parâmetros externos denotados
genericamente por y. Suponha que começando com uma temperatura T , uma quantidade infinitesimal de calordQ
¯
é adicionada ao sistema enquanto todos os outros parâmetros y são mantidos fixos.
A mudança dT da temperatura do sistema depende da sua natureza bem como dos parâmetros T e y que
especificam o macroestado. Definimos a razão:
(
Cy ≡
∂Q
∂T
)
,
(4.3)
y
no limite dQ
¯ → 0 (dT → 0) como a capacidade térmica do sistema. O subscrito y é usado para indicar que y é
mantido constante. Em geral, temos que,
Cy = Cy (T, y)
que nos indica que a quantidade de calor necessária para produzir uma variação da temperatura depende da temperatura inicial bem como de quais parâmetros externos que estão fixos. Além disso, a variação da temperatura
também depende da quantidade de matéria do sistema. Com efeito, notamos que a variação com a temperatura é
proporcional à massa ou ao número de moles do sistema. Por esta razão, é mais conveniente trabalhar com uma
CAPÍTULO 4. TERMODINÂMICA E SUAS APLICAÇÕES
104
quantidade que dependa apenas da natureza da substância, ou melhor, com uma quantidade intensiva. Definimos
o calor específico como sendo a capacidade térmica por unidade de massa (ou moles) da seguinte forma:
(
)
1 ∂Q
cy (T, y) ≡
, calor específico por massa
m ∂T y
(
)
1 ∂Q
cy (T, y) ≡
, calor específico molar.
n ∂T y
O calor específico por massa é medido em J/kg.K e o calor específico molar em J/mol.K. Neste curso estaremos
trabalhando mais com o calor específico molar que é mais conveniente para o caso em que a substância sob
consideração é um gás. A dependência da capacidade térmica com o parâmetro externo fixo é bastante pronunciada
nos casos de gases. De fato, vamos exemplificar isso considerando o caso simples em que temos um gás confinado
em uma câmara cujo volume pode ser variado através de um pistão. Assim, temos três grandezas que caracterizam
o macroestado deste gás: a temperatura, a pressão e o volume. Como resultado, podemos definir dois tipos de
capacidades térmicas para este sistema:
(a) capacidade térmica a volume constante CV , ou seja, mantendo-se o pistão fixo em uma determinada posição;
(b) capacidade térmica a pressão constante Cp , onde o pistão é livre para se mover de modo que seu próprio peso
distribuído sobre a área do pistão exerce uma pressão constante sobre o gás que agora pode variar seu volume.
Para determinar a capacidade térmica a volume constante (CV ), simplesmente prendemos o pistão mantendo
fixo o volume ocupado pelo gás. Como resultado, o gás não pode realizar trabalho e todo calor adicionado ao gás
é convertido em variação da energia interna do gás, i.e., no aumento de sua temperatura. Assim, de acordo com a
primeira lei da termodinâmica, temos neste caso que:
dQ
¯ = dĒ.
No caso da capacidade térmica a pressão constante (Cp ), o gás pode se expandir e com isso realizar trabalho
sobre o pistão no momento que calor é adicionado ao gás. Assim, a quantidade de calor é parte convertida em
trabalho do gás sobre o pistão e parte em variação da sua temperatura. Assim, da primeira lei da termodinâmica,
podemos escrever:
dQ
¯ = dĒ +dW.
¯
A comparação das duas situações nos indica que CV < Cp pois no segundo caso precisamos adicionar mais
calor para produzir a mesma variação de temperatura. No caso de substâncias nos estados líquido e no estado
sólido, CV e Cp não diferem muito entre si desde que a expansão térmica destas substâncias é muito pequena.
4.3. CALOR ESPECÍFICO E CAPACIDADE TÉRMICA
105
Outra maneira de expressar a capacidade térmica é usando a relação dQ
¯ = T dS:
(
dQ
¯ =
∂Q
∂T
)
(
dT = Cy dT = T dS = T
y
∂S
∂T
)
dT
y
assim,
(
Cy = T
∂S
∂T
)
.
(4.5)
y
No caso particular em que os parâmetros externos são mantidos constantes, o sistema não realiza trabalho e,
pela primeira lei da termodinâmica,dQ
¯ = dĒ. No caso do volume ser o único parâmetro externo, segue que:
(
dQ
¯ =
∂Q
dT
(
)
dT =
V
∂ Ē
dT
)
dT,
V
e como:
(
CV =
∂Q
∂T
)
V
segue que:
(
CV =
∂ Ē
∂T
)
(4.6)
V
A Eq. (4.6) é bastante útil e completamente geral sendo empregada em várias situações.
A determinação do calor específico requer, necessariamente, uma medida do calor. Antes do calor ser entendido como uma forma de energia, era comum usar uma unidade de medida separada para o calor. Esta era
chamada de caloria definida com sendo a quantidade de calor necessária para elevar de 1o C a temperatura da água
de 14,5o C para 15,5o C à pressão de 1 atm. Joule mostrou através de um experimento clássico que o calor e energia
eram equivalentes, e além disso, através da medida da capacidade térmica da água permitiu expressar a caloria em
unidades absolutas de energia. Em joules, a caloria é dada por:
1 cal = 4, 1840 J.
4.3.1
Entropia
Queremos determinar agora a variação da entropia através de medidas das grandezas definidas previamente. Para
isso, usamos a 2a lei da termodinâmica que nos permite expressar a entropia em termos da quantidade de calor:
dS =
dQ
¯
T
CAPÍTULO 4. TERMODINÂMICA E SUAS APLICAÇÕES
106
que integrada nos permite determinar a variação da entropia entre dois macroestados i e f :
∆S = Sf − Si =
∫
f
dQ
¯
i(eq) T
(4.7)
onde o subscrito (eq) indica que o sistema sob consideração deve ler levado do macroestado inicial ao final através
de um processo reversível (quasi-estático). Neste caso, conforme já discutido, a diferença de entropia ∆S é
independente do caminho. Adicionalmente, o sistema encontra-se sempre em equilíbrio em todos os estágios do
processo.
Considere que um macroestado é especificado apenas pela temperatura e todos os demais parâmetros externos
são mantidos constantes. Se conhecemos Cy (T ) nestas condições, então a diferença de entropia pode ser escrita
na forma:
Sf − Si =
∫
Tf
Ti
Cy (T ′ )
dT ′
T′
No caso particular, em que Cy é independente da temperatura, segue que:
(
Sf − Si = Cy ln
Tf
Ti
)
,
(Cy independente da temperatura).
(4.8)
A Eq. (4.8) nos permite relacionar a variação da entropia que pode ser determinada através da teoria microscópica, com a capacidade térmica que está relacionada com a quantidade de calor absorvida/cedida pelo sistema
e a correspondente variação da temperatura, ou seja, é uma medida puramente macroscópica. Assim, temos mais
uma vez, a conexão entre as duas teorias que temos estudado no curso.
4.3.2
Conseqüências da definição da entropia absoluta
A Eq. (4.7) nos permite determinar a diferença de entropia entre dois macroestados de um sistema. No entanto,
mencionamos quando discutimos Física Estatística, que é possível determinar a entropia de maneira absoluta, i.e.,
não apenas sua variação mas o seu valor absoluto assim como no caso da temperatura. Com efeito, a terceira lei
da termodinâmica implica que
S → S0 ,
quando
T → 0.
O fato da entropia ter um valor absoluto tem conseqüências importantes com reflexo na determinação de quantidades experimentais a partir dos valores de entropia. Para exemplificar, descrevemos abaixo um dos exemplos
dados no livro-texto: a transição de fase do estanho-cinza para o estanho branco. Outros exemplos podem ser
encontrados no livro do Reif e demais livros de Termodinâmica e Física Estatística.
4.3. CALOR ESPECÍFICO E CAPACIDADE TÉRMICA
107
A transição estanho cinza — estanho branco
O estanho existe na natureza em duas formas: acima da temperatura T0 ∼ 292 K, o estanho tem a forma chamada
estanho “branco" que é metálico; abaixo de T0 a forma mais estável é a “cinza" que é um semicondutor. Exatamente
na temperatura de transição T0 , ambas as fases coexistem e precisamos de uma quantidade de calor Q0 para
transformar 1 mol de estanho cinza em estanho branco. No entanto, como a velocidade da transição é muito baixa,
é possível encontrar estanho branco em temperaturas T < T0 . Assim, podemos medir a capacidade térmica do
estanho branco Cw (T ) em temperaturas abaixo da transição1 . Da mesma forma, podemos medir a capacidade
térmica do estanho cinza Cg (T ) na mesma faixa de temperatura.
Como a transformação é muito lenta, podemos imaginar uma situação em que impomos uma restrição sobre
o sistema de maneira a prevenir a transformação de estanho branco em estanho cinza. Isto equivale a considerar
a amostra de estanho composta por dois subsistemas em equilíbrio tal que nossos argumentos de física estatística
sejam aplicados. Com isso em mente, vamos imaginar que T → 0 tal que a entropia do sistema é somente aquela
devido aos spins dos núcleos atômicos. Como resultado, a entropia do estanho branco tende para um valor absoluto
S0 , i.e., Sw → S0 quando T → T0 . Este resultado significa que a entropia é reduzida a uma contribuição consistente
com a estrutura cristalina do estanho branco, ou seja, dos núcleos atômicos do estanho branco. Podemos fazer o
mesmo raciocínio para o caso do estanho cinza, i.e., Sg → S0 para T → T0 . Notamos que independentemente se
a fase é branca ou cinza, a entropia em T = T0 é a mesma pois temos os mesmos núcleos atômicos para as duas
fases. Assim, podemos escrever:
Sg (T ) → S0
Sw (T ) → S0 ,
e
T → 0.
(4.9)
ou seja,
Sg (0) = Sw (0).
Considere que tomamos o estanho branco de T = 0 até T = T0 (temperatura de transição). A entropia do
sistema mudará de acordo com
∫
T0
Sw (T0 ) = Sw (0) +
0
Cw (T ′ )
dT ′ .
T′
(4.10)
Agora considere que fazemos o mesmo para 1 mole de estanho cinza, mas na transição aplicamos uma quantidade de calor Q0 de transformação para converter todo o estanho cinza em estanho branco. Neste caso, a entropia
em T = T0 será igual à Sw (T0 ), i.e.,
∫
Sg (T0 ) = Sg (0) +
0
1
T0
Q0
Cg (T ′ )
dT ′ +
= Sw (T0 )
′
T
T0
Aqui estamos considerando que as capacidades térmicas são medidas à pressão constante.
(4.11)
CAPÍTULO 4. TERMODINÂMICA E SUAS APLICAÇÕES
108
pois todo o estanho cinza é convertido em estanho branco na transição. Assim, levando também em consideração
que Sg (0) = Sw (0), podemos escrever Eq. (4.11) na forma:
∫
T0
Sw (T0 ) = Sw (0) +
0
Subtraindo a Eq. (4.10) da Eq. (4.12) segue que:
∫
T0
Sw (0) +
0
Q0
Cg (T ′ )
dT ′ +
′
T
T0
(
Cg (T ′ )
Q0
dT ′ +
− Sw (0) +
′
T
T0
∫
0
T0
(4.12)
)
Cw (T ′ )
dT ′ = 0
T′
(4.13)
de onde podemos obter o calor de transformação da transição:
Q0
=
T0
∫
T0
0
Cw (T ′ )
dT ′ −
T′
∫
T0
0
Cg (T ′ )
dT ′
T′
(4.14)
A Eq. (4.14) nos permite determinar exatamente o calor de transformação para converter o estanho cinza
em estanho branco a partir da medida das capacidades térmicas dos dois tipos de estanho. Note que isso só é
possível devido à entropia apresentar um valor absoluto em T = 0. Caso a entropia fosse conhecida a menos
de uma constante arbitrária, não seria possível eliminar os valores da entropia na temperatura nula e o calor de
transformação não poderia ser previsto teoricamente.
4.4
Aplicações simples da Termodinâmica macroscópica à um gás ideal
Agora que já descrevemos todas as grandezas básicas que aparecem em termodinâmica, vamos considerar as conseqüências das leis da termodinâmica em sistemas simples. Como antes, consideramos que todas as quantidades
como pressão, energia, etc., são quantidades médias. No entanto, por simplicidade, vamos omitir as barras sobre
estas quantidades embora fique implícito que são quantidades médias.
A maioria dos sistemas que estudaremos serão caracterizados por apenas uma única variável externa, o volume
V . O macroestado do sistema será caracterizado por duas variáveis macroscópicas: o volume V e a energia interna
E. As outras quantidades como temperatura, pressão, etc., são então determinadas. Nem sempre a energia e o
volume são quantidades convenientes para se medir experimentalmente. Neste caso, as determinamos em termos
de outras variáveis macroscópicas.
A maioria dos cálculos envolvem troca de variáveis e cálculo de derivadas parciais. Para evitar ambigüidade,
usamos um índice para denotar as variáveis independentes que são mantidas constantes no cálculos das derivadas.
Por exemplo, se T e V são variáveis independentes, (∂E/∂T )V denota uma derivada onde V é constante. Por
outro lado, se p e T são mantidos como variáveis independentes, (∂E/∂T )p denota uma derivada onde p está fixo.
se escrevemos,
∂E
∂T
4.4. APLICAÇÕES SIMPLES DA TERMODINÂMICA MACROSCÓPICA À UM GÁS IDEAL
109
sem nenhum índice, não fica claro qual é a variável que está fixa no cálculo da derivada.
A primeira lei da termodinâmica, aplicada a qualquer processo infinitesimal, é dada por
dE = dQ
¯ − dW
¯
onde dE é a mudança na energia interna; dQ
¯ é o calor absorvido pelo sistema e dW
¯ é trabalho realizado pelo
sistema. Caso estejamos tratando de um processo quasi-estático, podemos expressar o calor absorvido em termos
da mudança na entropia do sistema, i.e., podemos aplicar a relação dS =dQ/T
¯
. O trabalho realizado pelo sistema
quando seu volume sofre uma variação infinitesimal dV é dado por pdV . Com isso, podemos escrever a primeira
lei da seguinte forma:
T dS = dE + pdV.
(4.15)
A maioria dos resultados que iremos obter neste capítulo são derivados a partir da Eq. (4.15).
4.4.1
Propriedades dos gases ideais
Como um primeiro exemplo, vamos considerar um gás ideal que é macroscopicamente definido através da chamada
lei dos gases ideais:
pV = nRT
(4.16)
onde n é o número de moles do gás.
Já derivamos a lei dos gases ideais a partir de argumentos microscópicos. Do ponto de vista macroscópicos, a
Eq. (4.16) nos indica o tipo de sistema que estamos trabalhando. Desta forma, a Eq. (4.16) pode ser considerada
como sendo puramente fenomenológica resumindo os principais resultados experimentais.
Provamos um segundo resultado importante, usando a Física Estatística, para os gases ideais: a energia do gás
depende apenas de sua temperatura, ou seja,
E = E(T ).
(4.17)
A Eq. (4.17) nos mostra que caso o volume do sistema seja alterado, a energia do gás não é modificada. Podemos mostrar que este resultado é uma conseqüência da leis dos gases ideais. Para isso, partimos do pressuposto de
que a energia do gás ideal dependa do volume, assim,
E = E(T, V )
CAPÍTULO 4. TERMODINÂMICA E SUAS APLICAÇÕES
110
o que nos permite escrever,
(
dE =
∂E
∂T
)
(
V
∂E
dT +
∂V
)
dV.
(4.18)
T
Agora, considere a Eq. (4.15):
dE p
+ dV
T
T
dS =
e como pV = nRT , então a razão p/T pode ser escrita na forma:
dS =
dE nR
+
dV
T
V
e substituindo dE pela Eq. (4.18) segue que:
1
dS =
T
(
∂E
∂T
)
[
V
1
dT +
T
(
)
∂E
∂V
]
nR
+
dV
V
T
Desde que a entropia é uma diferencial exata, podemos expressá-la como S = S(T, V ), assim:
(
dS =
∂S
∂T
)
(
V
∂S
dT +
∂V
)
dV
(4.19)
T
e comparando com a equação anterior, temos as seguintes igualdades:
(
)
(
)
∂S
1 ∂E
=
∂T V
T ∂T V
(
)
(
)
∂S
1 ∂E
nR
=
+
∂V T T ∂V T
V
(4.20)
(4.21)
Agora lembramos aqui que as segundas derivadas não dependem da ordem da diferenciação, assim, escrevemos:
∂2S
∂2S
=
∂V ∂T
∂T ∂V
ou ainda,
(
∂
∂V
) (
T
∂S
∂T
)
(
=
V
∂
∂T
) (
V
∂S
∂V
)
T
e substituindo as derivadas dadas pelas Eqs. (4.20) e (4.21), segue que:
(
∂
∂V
) [
T
1
T
(
∂E
∂T
) ]
(
=
V
1
1 ∂2E
=− 2
T ∂V ∂T
T
(
∂
∂T
) [
∂E
∂V
V
1
T
)
+
T
(
∂E
∂V
)
nR
+
V
T
1 ∂2E
T ∂V ∂T
]
4.4. APLICAÇÕES SIMPLES DA TERMODINÂMICA MACROSCÓPICA À UM GÁS IDEAL
111
onde usamos novamente o fato de que a segunda derivada independe da ordem. Assim, segue que:
0=−
(
1
T2
∂E
∂V
(
∂E
∂V
)
T
)
= 0.
T
e vemos então que a derivada da energia em relação ao volume do sistema é zero. Como resultado, a energia média
do gás ideal independe do volume.
Calores específicos de um gás ideal
Vamos derivar agora algumas expressões para os calores específicos envolvendo um gás ideal. Para isso, partimos
da primeira lei da termodinâmica:
dQ
¯ = dE + pdV.
O calor específico molar a volume constante cV é dado por:
1
cV =
n
(
∂Q
∂T
)
V
1
=
n
(
∂E
∂T
)
V
onde já demonstramos a última igualdade válida para volume constante. Assim, podemos escrever:
dE = ncV dT.
Substituindo-se esta relação na primeira lei da termodinâmica, segue que:
dQ
¯ = ncV dT + pdV
Vamos agora considerar o cálculo do calor específico molar à pressão constante. Neste caso, podemos fazer a
troca pdV = nRdT , com p constante, na equação acima. Assim, segue que:
dQ
¯ = ncV dT + nRdT = n(cV + R)dT
podemos escrever ainda,
(
dQ
¯ =
∂Q
∂T
)
dT = ncp dT = n(cV + R)dT
p
de onde tiramos a relação:
cp = cV + R.
(4.22)
CAPÍTULO 4. TERMODINÂMICA E SUAS APLICAÇÕES
112
Vemos então que cp > cV , como era esperado desde que à pressão constante parte do calor é convertido
em trabalho realizado pelo gás em sua expansão; a volume constante todo o calor é convertido em variação da
temperatura.
Uma quantidade bastante útil é a razão dos calores específicos γ:
γ≡
cp
cV
que no caso dos gases ideais pode ser escrita na forma alternativa através da Eq. (4.22)
γ = 1+
R
.
cV
A razão γ pode ser determinada experimentalmente através da medida da velocidade do som no gás. Usando
os métodos de Física Estatística, podemos determinar o valor de γ através do número de estados acessíveis para o
gás ideal que determinamos anteriormente:
Ω(E) = BV N E 3N/2
de onde obtemos:
ln Ω = ln B + N ln V +
3N
ln E
2
o que nos permite escrever:
β=
1
∂ ln Ω 3N
=
=
kB T
∂E
2E
assim,
3
3
3
E = N kB T = Na nkB T = nRT
2
2
2
e desde que temos o valor da energia média, podemos determinar o calor específico a volume constante:
cV =
1
n
(
∂E
∂T
)
=
V
13
nR
n2
∴
3
cV = R
2
e substituindo em Eq. (4.22), podemos determinar o calor específico a pressão constante:
5
cp = R
2
o que nos permite determinar a razão γ:
γ = 1+
R
5
= ≈ 1, 667.
3
R 3
2
(4.23)
4.4. APLICAÇÕES SIMPLES DA TERMODINÂMICA MACROSCÓPICA À UM GÁS IDEAL
113
Compressão e Expansão adiabáticas de um gás ideal
Se fazemos um gás sofrer uma expansão ao mesmo tempo que fica em contato com um reservatório térmico, então
sua expansão é isotérmica (temperatura constante). Neste caso, a lei dos gases ideais nos garante que
pV = constante,
ou seja, no diagrama p − V a pressão será uma função inversa do volume.
Suponha agora que o gás encontra-se termicamente isolado de suas vizinhanças. Neste caso, se o gás se
expande, o trabalho realizado será feito às custas de sua própria energia interna e sua temperatura mudará. Isto
está em contraste com a expansão isotérmica onde o reservatório fornecia a energia necessária na forma de calor
para contrabalançar as perdas pelo trabalho realizado pelo gás.
Vamos então determinar a forma da função p(V ) que descreve a expansão adiabática do gás ideal. Para isso,
partimos, como sempre, da primeira lei da termodinâmica dada pela Eq. (4.15):
dQ
¯ = dE + pdV
e conforme já mostramos, dE = ncV dT logo:
dQ
¯ = ncV dT + pdV
e como estamos considerando uma expansão adiabática, entãodQ
¯ = 0, o que nos permite escrever:
0 = ncV dT + pdV.
Aqui podemos usar a equação de estado para os gases ideais:
pV = nRT
ou ainda,
V dp + pdV = nRdT
∴
dT =
p
V
dV +
dp
nR
nR
e substituindo-se na primeira lei, podemos escrever ainda
(
ncV
)
p
V
dV +
dp + pdV = 0
nR
nR
ou ainda,
cV
p
V
dV + cV dp + pdV = 0
R
R
CAPÍTULO 4. TERMODINÂMICA E SUAS APLICAÇÕES
114
(
cV
V
cV dp + 1 +
R
R
)
pdV = 0
V cV dp + (R + cV ) pdV = 0
e lembrando que cp = cV + R assim,
V cV dp + cp pdV = 0
ou ainda
dp
dV
+γ
= 0,
p
V
onde usamos γ = cp /cV . Fazendo a integração, podemos escrever:
ln p + ln V γ = constante.
o que pode ser escrito na forma:
pV γ = constante.
(4.24)
A Eq. (4.24) nos indica que no caso de uma expansão adiabática, a pressão varia mais rapidamente com o
volume que no caso isotérmico pois γ > 1.
Entropia de um gás ideal
A entropia do gás ideal pode ser obtida usando a equação geral, oriunda da primeira lei da termodinâmica:
T dS = ncV (T )dT + pdV
e dividindo pela temperatura, podemos expressar a variação da entropia em termos da temperatura e o volume do
gás:
dS = ncV (T )
p
dT
+ dV
T
T
e como pV = nRT , podemos escrever ainda
dS = ncV (T )
dV
dT
+ nR
.
T
V
(4.25)
4.5. RELAÇÕES GERAIS PARA UMA SUBSTÂNCIA HOMOGÊNEA
115
A Eq. (4.25) permite determinar a entropia de n moles de um gás ideal para quaisquer valores de temperatura
e volume. Porém, antes de efetuar a integração diretamente, notamos que S = S(T, V ) e, então, a variação da
entropia é determinada trazendo o sistema de um macroestado padrão [caracterizado pelos valores (T0 , V0 )] ao
macroestado final (T, V ). Como S é uma variável de estado, a entropia depende apenas dos estados final e inicial
e não do caminho percorrido entre os dois pontos. Notamos que estamos tratando de processos quasi-estáticos.
Vamos supor o caso mais simples possível onde temos um processo que leva o sistema do macroestado (T0 , V0 )
ao estado (T, V0 ) mantendo-se o volume constante; em seguida temos um segundo processo que leva o sistema do
macroestado (T, V0 ) ao macroestado final (T, V ) onde a temperatura é mantida constante.
No primeiro passo, a variação da entropia é dada por:
S(T, V0 ) − S(T0 , V0 ) = n
∫
T
T0
cV (T ′ )
dT ′ ,
T′
e o segundo processo ocorre à temperatura constante:
S(T, V ) − S(T, V0 ) = nR
∫
V
V0
V
dV ′
dV ′ = nR ln
′
V
V0
Somando-se as duas equações, podemos escrever:
S(T, V ) − S(T, V0 ) + S(T, V0 ) − S(T0 , V0 ) = n
S(T, V ) − S(T0 , V0 ) = n
∫
T
T0
∫
T
T0
V
cV (T ′ )
dT ′ + nR ln
′
T
V0
cV (T ′ )
V
dT ′ + nR ln
′
T
V0
o que também pode ser escrita na forma:
∫
S(T, V ) = n
4.5
cV (T ′ )
dT ′ + nR ln V + constante.
T′
Relações gerais para uma substância homogênea
Vamos considerar um sistema homogêneo cujo volume V é o único parâmetro externo de relevância. Partimos da
relação geral:
dQ
¯ = T dS = dE + pdV,
e vamos obter várias relações gerais que serão úteis nos estudos subseqüentes.
(4.26)
CAPÍTULO 4. TERMODINÂMICA E SUAS APLICAÇÕES
116
4.5.1
Variáveis independentes S e V
Temos que:
dE = T dS − pdV
(4.27)
onde estamos considerando S e V como variáveis independentes de modo que a energia interna E = E(S, V ).
Assim, podemos escrever:
(
dE =
∂E
∂S
)
(
dS +
V
∂E
∂V
)
dV
S
e comparando com a Eq. (4.27), obtemos as seguintes relações básicas:
(
)
∂E
,
T=
∂S V
)
(
∂E
−p =
.
∂V S
(4.28a)
(4.28b)
Note que o lado direito da Eq. (4.27) é sempre igual à uma diferencial exata de uma quantidade, neste caso, a
energia interna E. Assim, os parâmetros T, S, V e p não podem ser variados de modo arbitrário, pois existe uma
conexão entre elas para garantir que suas combinações permitam obter uma diferencial exata dE. Para achar esta
conexão, lembramos que a segunda derivada de qualquer quantidade em relação à duas variáveis quaisquer deve
ser independente da ordem da diferenciação, assim, podemos escrever:
∂2E
∂2E
=
∂S∂V
∂V ∂S
ou seja,
(
∂
∂S
) (
V
∂E
∂V
)
(
=
S
∂
∂V
) (
S
∂E
∂S
)
V
e substituindo as Eqs. (4.28) obtemos:
(
4.5.2
∂T
∂V
)
S
(
∂p
=−
∂S
)
.
V
Variáveis independentes S e p
Poderíamos ter escolhido S e p como variáveis independentes. Para isso, usamos:
pdV = d(pV ) − V dp
que é simplesmente a diferencial de duas variáveis. Substituindo o produto pdV na Eq. (4.27), segue que:
dE = T dS − pdV
(4.29)
4.5. RELAÇÕES GERAIS PARA UMA SUBSTÂNCIA HOMOGÊNEA
117
dE = T dS − [d(pV ) − V dp] = T dS − d(pV ) + V dp
o que também pode ser colocado na forma:
d(E + pV ) = T dS + V dp
e definindo a entalpia como:
H = E + pV
(4.30)
dH = T dS + V dp
(4.31)
segue que:
e vemos que também se trata de uma função de estado H = H(S, p). Assim, temos a relação geral:
(
dH =
∂H
∂S
)
(
dS +
p
∂H
∂p
)
dp
S
e comparando com a Eq. (4.31) obtemos:
(
)
∂H
∂S p
(
)
∂H
V =
∂p S
T=
(4.32a)
(4.32b)
e da mesma forma que fizemos para a energia interna, consideramos que a segunda derivada da entalpia em relação
às variáveis S e p é independente da ordem de integração, i.e.,
∂2H
∂2H
=
∂S∂p ∂p∂S
ou seja,
(
∂
∂S
) (
e substituindo as Eqs. (4.32a):
4.5.3
p
(
∂H
∂p
∂T
∂p
)
(
=
S
)
(
=
S
∂
∂p
∂V
∂S
) (
S
∂H
∂S
)
p
)
.
p
Variáveis Independentes T e V
Neste caso, devemos eliminar a variável S da Eq. (4.27). Para isso usamos,
T dS = d(T S) − SdT
(4.33)
CAPÍTULO 4. TERMODINÂMICA E SUAS APLICAÇÕES
118
o que nos permite escrever:
dE = d(T S) − SdT − pdV
d(E − T S) = −SdT − pdV
e definindo
F = E −TS
(4.34)
como sendo a energia livre de Helmholtz, podemos escrever:
dF = −SdT − pdV.
(4.35)
De maneira geral, se F = F (T, V ), então a diferencial de F é dada por:
(
dF =
∂F
∂T
)
(
dT +
V
∂F
∂V
)
dV
T
e comparando com a Eq. (4.35), obtemos:
(
)
∂F
−S =
∂T V
)
(
∂F
−p =
∂V T
(4.36a)
(4.36b)
Aqui novamente consideramos o fato de que a energia livre também é uma função de estado de modo que sua
segunda derivada em relação à T e V é independente da ordem de diferenciação, assim:
∂2F
∂2F
=
∂T ∂V
∂V ∂T
ou seja,
(
∂
∂T
) (
V
∂F
∂V
)
(
=
T
∂
∂V
) (
T
∂F
∂T
)
V
e substituindo-se a Eq. (4.36a), chegamos à mais uma relação:
(
∂p
∂T
)
(
=
V
∂S
∂V
)
.
T
(4.37)
4.5. RELAÇÕES GERAIS PARA UMA SUBSTÂNCIA HOMOGÊNEA
4.5.4
119
Variáveis Independentes T e p
A última combinação de variáveis independentes será a pressão e o volume do sistema. Neste caso também
partimos da relação geral para a energia livre
dE = T dS − pdV
e agora desejamos eliminar tanto S como V em termos de T e p, respectivamente. Para isso, usamos simultaneamente:
T dS = d(T S) − SdT
pdV = d(pV ) − V dp
assim, segue que:
dE = d(T S) − SdT − d(pV ) + V dp
que leva a seguinte relação:
d(E − T S + pV ) = −SdT + V dp.
Definindo a energia livre de Gibbs na forma:
G = E − T S + pV
podemos escrever a diferencial acima como:
dG = −SdT + V dp.
Como antes, G = G(T, p) o que nos permite escrever a diferencial geral na forma:
(
dG =
∂G
∂T
)
(
∂G
dT +
∂p
p
)
dp
T
e comparando com a equação anterior, chegamos às seguintes igualdades:
(
)
∂G
−S =
∂T p
)
(
∂G
V =
∂p T
Da mesma forma que nos demais casos, a energia livre de Gibbs também tem a propriedade:
∂2G
∂2G
=
∂T ∂p ∂p∂T
(4.38a)
(4.38b)
CAPÍTULO 4. TERMODINÂMICA E SUAS APLICAÇÕES
120
ou seja,
(
∂
∂T
) (
p
∂G
∂p
)
(
=
T
∂
∂p
) (
T
∂G
∂T
)
p
e substituindo (4.38), podemos escrever ainda
(
4.5.5
∂V
∂T
)
(
∂S
=−
∂p
p
)
.
(4.39)
T
Relações de Maxwell
Toda a discussão precedente tem origem na relação fundamental
dE = T dS − pdV
através da qual obtivemos quatro igualdades dadas pelas Eqs. (4.29) a (4.39) que são chamadas de relações de
Maxwell. Estas relações são satisfeitas devido ao fato das variáveis termodinâmicas não serem completamente
independentes pois não podem variar de maneira arbitrária. Com efeito, as variações dos parâmetros externos
como V , p e T são tais que grandezas como entropia e energia interna independem do trajeto utilizado para
sair do ponto inicial e chegar ao ponto final do processo. Este vínculo pode ser implementado matematicamente
considerando que a segunda derivada da energia independe da ordem de diferenciação. Isto é válido para qualquer
função contínua que dependa de duas ou mais variáveis.
Quando discutimos a Física Estatística, mencionamos que era possível construir uma descrição macroscópica
para um sistema se tivéssemos o número de estados acessíveis ao sistema (Ω). De fato, obtivemos duas relações
fundamentais que permitiam obter tanto a temperatura como a força generalizada em termos de Ω. Usando a
relação fundamental da Física Estatística, S = kB ln Ω, podemos escrever estas relações na forma:
1
=
T
(
∂S
∂E
)
(
e
p=T
V
∂S
∂V
)
(4.40)
E
e assim, bastava conhecer o número de estados acessíveis como função de E e V para se obter uma descrição
macroscópica do sistema. A Eq. (4.27) é resultado do fato da temperatura e pressão serem expressos em termos
da entropia:
(
dS =
∂S
∂E
)
(
dE +
V
∂S
∂V
)
dV
E
e substituindo a Eq. (4.40) obtemos:
dS =
p
1
dE + dV
T
T
∴
dE = T dS − pdV
que é a Eq. (4.27). Assim, vemos então que tudo pode ser demonstrado a partir dos conceitos aprendidos nos
capítulos anteriores. Abaixo, apresentamos um quadro que resume as principais relações que desenvolvemos nesta
seção.
4.6. CAPACIDADES TÉRMICAS (CASO GERAL)
121
Tabela 4.1: Tabela resumindo as funções termodinâmicas definidas nesta seção.
4.6
Energia Interna
E = E(S, V )
dE = T dS − pdV
Energia livre de Helmholtz
F = F (T, V )
dF = −SdT − pdV
Energia livre de Gibbs
G = G(T, p)
dG = −SdT + V dp
Entalpia
H = H(S, p)
dH = T dS + V dp
Capacidades Térmicas (caso geral)
Vamos considerar uma substância homogênea cujo volume V é o único parâmetro externo relevante. Aqui pretendemos determinar uma relação geral entre a capacidade térmica a volume e pressão constantes. Estas relações são
importantes porque normalmente podemos determinar a CV teoricamente de maneira direta, porém, Cp é a quantidade comumente determinada experimentalmente. Assim, a relação que será obtida nos permitirá estabelecer a
conexão entre as duas quantidades.
Começamos lembrando as definições das capacidades térmicas:
(
)
(
)
∂Q
∂S
CV =
=T
,
∂T V
∂T V
)
(
)
(
∂S
∂Q
=T
.
Cp =
∂T p
∂T p
Experimentalmente, controlamos mais facilmente a pressão e a temperatura. Assim, vamos expressar o calor
como função destes parâmetros:
(
∂S
∂T
dQ
¯ = T dS = T
)
(
dT + T
p
∂S
∂p
)
dp
T
o que nos permite escrever
(
dQ
¯ = T dS = Cp dT + T
∂S
∂p
)
dp
T
enquanto que a outra derivada (∂S/∂p)T não é medida experimentalmente. Porém, podemos reescrevê-la usando
uma das relações de Maxwell:
(
∂S
∂p
)
(
T
∂V
=−
∂T
)
p
que é uma quantidade medida experimentalmente. É a variação do volume do sistema com a temperatura à pressão
constante. Definimos o coeficiente de expansão volumétrica como:
α=
1
V
(
∂V
∂T
)
(4.41)
p
CAPÍTULO 4. TERMODINÂMICA E SUAS APLICAÇÕES
122
o que nos permite escrever:
dQ
¯ = Cp dT − αT V dp.
(4.42)
Desde que procuramos uma relação entre Cp e CV , podemos escrever Eq. (4.42) na forma
(
dQ
¯ =
∂Q
∂T
)
[(
dT = Cp dT − αT V
V
∂p
∂T
)
(
∂p
dT +
∂V
V
)
]
dV
T
e desde que estamos considerando que a variação (∂Q/∂T )V a volume constante então dV = 0, o que nos permite
escrever:
(
)
∂p
∂T
CV dT = Cp dT − αT V
dT
V
ou ainda,
(
CV = Cp − αT V
∂p
∂T
)
.
(4.43)
V
Resta determinar a derivada (∂p/∂T )V . Para isso, expressamos a variação do volume em termos da pressão e
temperatura. Assim, segue que:
(
dV =
∂V
∂T
(
)
∂V
dT +
∂p
p
)
dp
T
e no caso de dV = 0, podemos escrever ainda
(
∂V
∂T
(
)
(
∂V
dT +
∂p
p
∂V
∂p
)
)
(
dp = 0
T
∂V
dp = −
∂T
T
(
)
dT
p
)
∂V
∂T p
) dT
dp = − (
∂V
∂p T
e expressando dp em termos da variação da temperatura e volume (mantido constante), obtemos que:
(
)
∂V
(
)
∂T p
∂p
) dT
dp =
dT + 0 = − (
∂V
∂T V
∂p T
4.7. MANIPULANDO DERIVADAS PARCIAIS
123
)
(
(
∂p
∂T
)
V
∂V
∂T p
)
= −(
∂V
∂p T
Aqui definimos a chamada compressibilidade isotérmica como:
κ=−
(
1
V
∂V
∂p
)
(4.44)
T
onde o sinal de menos é usado na definição para que κ > 0. Assim, usando a definição (4.41), segue que:
(
∂p
∂T
)
=
V
α
κ
e substituindo na Eq. (4.43), temos:
CV = Cp − αT V
Cp − CV = T V
α
κ
α2
κ
(4.45)
que é a relação procurada. Notamos que a Eq. (4.45) é completamente geral podendo ser aplicada para sólidos,
líquidos e gases. Os dois primeiros apresentam valores pequenos de α de maneira que Cp e CV diferem muito
pouco entre si.
4.7
Manipulando Derivadas Parciais
Faremos aqui uma digressão para discutir alguns aspectos técnicos relacionados com a manipulação de derivadas
parciais. Isto se faz necessário tendo-se em vista que nem sempre as relações de Maxwell são suficientes para se
obter todas as identidades termodinâmicas. Neste contexto, lançamos mão de um método elegante baseados nos
Jacobianos.
4.7.1
Jacobianos
O Jacobiano aparece quando estamos trabalhando com integrais múltiplas e desejamos efetuar uma troca de variáveis. Por exemplo, para passar de coordenadas retangulares para cilíndricas ou esféricas. De modo geral, o
Jacobiano é um determinante de derivadas parciais, que no caso bidimensional, é definido por:
∂(u, v)
≡
∂(x, y)
∂u
∂x
∂v
∂x
∂u
∂y
∂v
∂y
(
=
∂u
∂x
) (
y
∂v
∂y
)
(
∂v
−
∂x
x
) (
y
∂u
∂y
)
(4.46)
x
CAPÍTULO 4. TERMODINÂMICA E SUAS APLICAÇÕES
124
onde na última linha utilizamos a notação que temos empregado no decorrer do curso. Os Jacobianos têm várias propriedades que os tornam úteis em aplicações em termodinâmica. Abaixo, apresentamos algumas destas
propriedades.
Simetria de Jacobianos
O Jacobiano troca de sinal sempre que duas variáveis do numerador são trocadas. Isto ocorre porque o sinal do
determinante é trocado quando invertemos suas linhas e colunas. Assim, temos:
∂(u, v)
∂(v, u) ∂(v, u)
∂(u, v)
=−
=
=−
.
∂(x, y)
∂(x, y) ∂(y, x)
∂(y, x)
(4.47)
Derivadas Parciais e Jacobianos
Podemos estabelecer uma conexão direta entre derivadas parciais e Jacobianos. Para isso, podemos fazemos v = y
na Eq. (4.46):
∂(u, y)
=
∂(x, y)
∂u
∂y
∂y
∂y
∂u
∂x
∂y
∂x
∂(u, y)
=
∂(x, y)
(
∂u
∂x
0
=
∂u
∂x
∂u
∂y
1
)
(4.48)
y
e vemos então que a derivada parcial é um caso particular do Jacobiano. Isto pode ser estendido para três ou mais
variáveis:
∂(u, y, z)
=
∂(x, y, z)
(
∂u
∂x
)
.
y,z
Regra da Cadeira para Jacobianos
Podemos definir uma regra da cadeia para Jacobianos:
∂(u, v) ∂(u, v) ∂(r, s)
=
.
∂(x, y)
∂(r, s) ∂(x, y)
(4.49)
Para provar a Eq. (4.49), usamos a notação compacta
∂u
≡ ux
∂x
assim, segue que:
ur us
∂(u, v) ∂(r, s)
=
∂(r, s) ∂(x, y)
vr vs
rx ry
sx sy
=
ur rx + us sx ur ry + us sy
vr rx + vs sx
vr ry + vs sy
=
ux uy
vx
vy
=
∂(u, v)
∂(x, y)
4.7. MANIPULANDO DERIVADAS PARCIAIS
125
como queríamos demonstrar2 .
Produtos de Jacobianos
Também podemos efetuar produtos de Jacobianos da seguinte forma:
∂(u, v) ∂(a, b) ∂(u, v) ∂(a, b)
=
.
∂(x, y) ∂(c, d)
∂(c, d) ∂(x, y)
(4.50)
Você pode provar esta propriedade facilmente usando a regra da cadeia. Fica como exercício!
Recíprocos de Jacobianos
Considerando que
∂(u, v)
=1
∂(u, v)
por razões óbvias, usando a regra da cadeia, podemos escrever:
∂(u, v) ∂(u, v) ∂(r, s)
=
=1
∂(u, v)
∂(r, s) ∂(u, v)
ou seja,
∂(u, v)
1
).
=(
∂(r, s)
∂(r, s)
∂(u, v)
(4.51)
Esta propriedade nos permite reescrever a regra da cadeia da seguinte forma:
∂(u, v)
∂(u, v)
∂(r, s)
=
.
∂(x,
y)
∂(x, y)
∂(r, s)
(4.52)
Uma particularização da Eq. (4.51) nos permite obter uma relação interessante entre derivadas parciais. Para
isso, fazemos v = s = y, e r = x na Eq. (4.51) o que nos leva a
∂(u, y)
1
).
=(
∂(x, y)
∂(x, y)
∂(u, y)
2
Aqui consideramos que:
∂u
∂u ∂r ∂u ∂s
=
+
∂x
∂r ∂x ∂s ∂x
∂u
∂u ∂r ∂u ∂s
=
+
.
∂y
∂r ∂y ∂s ∂y
e o mesmo válido para a variável v.
CAPÍTULO 4. TERMODINÂMICA E SUAS APLICAÇÕES
126
mas pela propriedade ilustrada na Eq. (4.48) podemos escrever ainda
(
4.7.2
∂u
∂x
)
=(
y
1
) .
∂x
∂u y
(4.53)
Aplicações de Jacobianos
Para dar uma idéia concreta das aplicações de Jacobianos, vamos fazer alguns exemplos de aplicações dos mesmos
escrevendo algumas derivadas parciais em termos de quantidades conhecidas e medidas experimentalmente como
κ, α, etc.
(
Cálculo de
∂p
∂T
)
V
Queremos expressar a derivada da pressão em relação à temperatura mantendo-se o volume constante. Para isso,
partimos da expressão desta derivada em temos de Jacobianos usando-se a Eq. (4.48):
(
∂p
∂T
)
∂(p, V )
∂(T, V )
=
V
e como queremos, em princípio, relacionar esta derivada com o coeficiente de expansão térmica e compressibilidade volumétrica, então temos que:
(
∂p
∂T
)
=
V
∂(p, V ) ∂(p, T )
∂(V, p) ∂(p, T )
=−
∂(p, T ) ∂(T, V )
∂(T, p) ∂(V, T )
onde invertemos a ordem dos elementos da primeira derivada tanto no numerador quanto denominador. No segundo termo, apenas invertemos o par (T, V ) no denominador o que gerou o sinal negativo. Desde que o primeiro
termo é proporcional ao coeficiente de expansão volumétrica, então escrevemos:
(
∂p
∂T
)
(
=−
V
∂V
∂T
)
∂(p, T )
∂(V,
T)
p
e segundo termo pode ser reescrito usando-se a propriedade expressa pela Eq. (4.53):
(
∂p
∂T
)
(
V
∂V
=−
∂T
)
p
(
1
∂V
=−
∂(V, T )
∂T
∂(p, T )
)
(
p
1
1
) =
∂V
V
∂p T
(
∂V
∂T
)
[
p
1
−
V
1
) ]
∂V
∂p T
(
e lembrando que o coeficiente de expansão térmica α e a compressibilidade isotérmica κ são dados por:
(
)
1 ∂V
α=
V ∂T p
(
)
1 ∂V
κ=−
V ∂p T
então, substituindo estas relações então vamos obter:
(
∂p
∂T
)
=
V
α
κ
(4.54)
4.7. MANIPULANDO DERIVADAS PARCIAIS
127
Relação entre as capacidades térmicas Cp e CV
Podemos obter a Eq. (4.45) que relaciona as capacidades térmicas Cp e CV através do uso dos Jacobianos. Vamos
ilustrar este cálculo agora.
Temos que a capacidade térmica a volume constante é definida como:
(
CV = T
∂S
∂T
)
[
V
∂(S, V ) ∂(T, p)
∂(S, V ) ∂(T, V )
∂(S, V )
=T
=T
=T
∂(T, V )
∂(T, p) ∂(T, V )
∂(T, p) ∂(T, p)
]−1
e como
∂(T, V ) ∂(V, T )
=
=
∂(T, p)
∂(p, T )
(
∂V
∂p
)
= −V κ
T
assim, temos que
CV = −
T ∂(S, V )
V κ ∂(T, p)
onde o Jacobiano restante não pode, em princípio, ser simplificado. Assim, usamos o determinante para calculá-lo
explicitamente:
∂(S, V )
=
∂(T, p)
∂S
∂p
∂S
∂T
(
=
∂V
∂T
∂V
∂p
∂S
∂T
) (
p
∂V
∂p
)
(
−
T
∂S
∂p
) (
e substituindo na expressão para CV , vamos obter
T
CV = −
Vκ
[(
∂S
∂T
) (
p
∂V
∂p
)
(
∂S
−
∂p
T
) (
T
∂V
∂T
T
∂V
∂T
)
.
p
) ]
p
onde podemos identificar várias quantidades previamente definidas:
(
)
∂S
Cp
=
∂T p
T
(
)
∂V
= −V κ
∂p T
(
)
(
)
∂S
∂V
=−
= −V α
∂p T
∂T p
(
)
∂V
=Vα
∂T p
e substituindo em CV , segue que:
[
]
[
T Cp
T V α2
CV = −
(−V κ) − (−V α)V α = Cp −
Vκ T
κ
que é o mesmo resultado da Eq. (4.45).
]
∴
Cp − CV =
T V α2
κ
CAPÍTULO 4. TERMODINÂMICA E SUAS APLICAÇÕES
128
(
∂T
∂p
Cálculo de
)
S
Vamos determinar o valor desta derivada em termos das quantidades anteriores. Para isso, partimos de
(
∂T
∂p
)
=
S
∂(T, S) ∂(T, S) ∂(p, T )
=
∂(p, S)
∂(p, T ) ∂(p, S)
e invertendo a ordem do numerador do primeiro Jacobiano e usando a propriedade dada pela Eq. (4.53) podemos
escrever ainda:
(
∂T
∂p
)
(
=−
S
∂(S, T )
1
∂(S, T )
1
∂S
=−
=−
∂(p, T ) ∂(p, S)
∂(p, T ) ∂(S, p)
∂p
∂(p, T )
∂(T, p)
)
(
T
1
)
∂S
∂T p
e reconhecendo a capacidade térmica a pressão constante no denominador, podemos escrever ainda
(
∂T
∂p
)
(
S
)
∂S
=−
∂p
T
T
=
Cp
(
∂V
∂T
)
T
p Cp
onde usamos uma das relações de Maxwell para transformar a primeira derivada. Agora, percebemos que a derivada resultante é proporcional ao coeficiente de expansão térmica, assim, chegamos ao resultado final:
(
Provar que: T dS =
∂T
∂p
)
=
S
αV T
.
Cp
(4.55)
Cp
κ
dV + CV dp.
αV
α
Aqui temos que demonstrar a relação acima. Para isso, expressamos a variação da entropia em termos do volume
e pressão:
(
T dS = T
∂S
∂V
)
(
dV + T
p
∂S
∂p
)
dp
V
e resta então escrever as duas derivadas em termos de quantidades conhecidas. Vamos começar com a primeira:
(
∂S
∂V
)
=
p
∂(S, p)
∂(S, p) ∂(p, T ) ∂(S, p) ∂(T, p)
=
=
=
∂(V, p) ∂(p, T ) ∂(V, p) ∂(T, p) ∂(V, p)
(
(
(
∂S
∂T
) (
∂T
∂V
p
)
p
)
∂S
Cp
∂T p
∂S
Cp
) = T =
=(
∂V
∂V p
αV
αT V
∂T p
)
A outra derivada pode ser trabalhada da mesma forma:
(
∂S
∂p
)
V
∂(S, V ) ∂(S, V ) ∂(T, V )
=
=
=
∂(p, V ) ∂(T, V ) ∂(p, V )
(
∂S
∂T
)
V
(
∂(T, V ) ∂(T, p)
∂S
=−
∂(T, p) ∂(p, V )
∂T
)
V
∂(V, T ) ∂(T, p)
∂(p, T ) ∂(V, p)
4.8. ENTROPIA E ENERGIA INTERNA
129
(
)
∂V
(
)
(
) (
) (
)
)
(
∂S
∂S
∂V
∂T
∂S
∂p T
(
)
=−
=−
∂p V
∂T V ∂p T ∂V p
∂T V ∂V
∂T p
(
∂S
∂p
)
=−
V
CV (−κV ) CV κ
=
T αV
Tα
e substituindo os dois resultados na expressão, podemos escrever:
Cp
CV κ
dV + T
dp
αT V
Tα
T dS = T
T dS =
4.8
CV κ
Cp
dV +
dp.
αV
α
Entropia e Energia Interna
Considere a temperatura T e o volume V de uma substância como variáveis independentes. Então, podemos
escrever a entropia na forma:
S = S(T, V )
o que nos permite escrever a diferencial:
(
dS =
∂S
∂T
)
(
dT +
V
)
∂S
∂V
dV
T
A primeira derivada é proporcional à capacidade térmica a volume constante enquanto que a segunda pode ser
reescrita usando uma relação de Maxwell, assim temos que:
(
CV
∂p
dS =
dT +
T
∂T
)
dV.
(4.56)
V
O lado direito da Eq. (4.56) pode ser calculado através da equação de estado. CV , em geral, é função de V e
T , assim segue que:
(
∂CV
∂V
)
(
=
T
∂
∂V
) [ (
T
T
∂S
∂T
) ]
=T
V
∂2S
∂2S
=T
∂V ∂T
∂T ∂V
ou seja,
(
∂CV
∂V
)
(
=T
T
∂
∂T
) (
V
∂S
∂V
)
(
=T
T
∂
∂T
) (
V
∂p
∂T
(
)
=T
V
∂2p
∂T 2
)
.
V
Já discutimos que todas as propriedades termodinâmicas pode ser calculadas a partir da sua entropia. Assim,
precisamos descobrir como a entropia pode ser determinada experimentalmente. Pode ser demonstrado que a
determinação da entropia pode ser realizada através das seguintes quantidades:
CAPÍTULO 4. TERMODINÂMICA E SUAS APLICAÇÕES
130
(a) o calor específico (ou capacidade térmica) em função da temperatura para algum valor fixo V = Vi do volume;
(b) equação de estado.
Por exemplo, a equação de estado pode ser usada para determinar (∂CV /∂V )T como função da temperatura e
volume. Esta informação é suficiente para relacionar a capacidade térmica CV (T, V ) em qualquer volume com a
capacidade térmica no volume V1 e à mesma temperatura, i.e.,
(
dCV (T, V ) =
e integrando sobre o volume, podemos escrever:
∫
∂CV
∂V
V
(
CV (T, V ) = CV (T, V1 ) +
V1
)
dV
T
∂CV (T, V ′ )
∂V
)
dV ′ .
(4.57)
T
Conhecendo o valor da capacidade térmica e usando o conhecimento de (∂p/∂T )V como função de T e V ,
fornecido pela equação de estado, podemos encontrar a entropia S = S(T, V ) em qualquer temperatura e qualquer
volume V em comparação com seu valor no macroestado (T0 , V0 ). Assim, precisamos apenas integrar a Eq. (4.56)
usando alguma trajetória no diagrama T − V . Assim, por exemplo, podemos fazer:
S(T, V ) − S(T0 , V0 ) = S(T, V ) − S(T0 , V ) + S(T0 , V ) − S(T0 , V0 )
ou seja,
S(T, V ) − S(T0 , V0 ) =
∫
T
T0
CV (T ′ , V )
dT ′ +
T′
∫
V
V0
(
∂p(T, V ′ )
∂T
)
dV ′
V
que nos permite determinar a variação da entropia a partir da medida da capacidade térmica e da equação de estado.
Vamos agora considerar a energia interna E e considerá-la como função da temperatura e volume, i.e.,
dE = T dS − pdV
e expressando a variação da entropia em termos do volume e temperatura, segue que:
[
(
CV
∂p
dE = T
dT +
T
∂T
]
)
dV − pdV
V
e agrupando as diferenciais que têm fatores em comum, obtemos
[ (
dE = CV dT + T
o que nos permite escrever:
(
∂p
∂T
)
]
− p dV
V
)
∂E
= CV
∂T V
)
(
)
(
∂p
∂E
=T
−p
∂V T
∂T V
o que nos permite observar que a dependência da energia interna com o volume pode ser determinada a partir da
equação de estado.
4.9. EXPANSÃO LIVRE E O PROCESSO DE JOULE-THOMSON
131
válvula
vácuo
isolante
Figura 4.1: O estágio inicial de um processo de expansão livre. Após a válvula ser aberta o gás ocupa as duas câmaras e,
depois de algum tempo, atinge um estado de equilíbrio.
4.9
Expansão livre e o processo de Joule-Thomson
Vamos considerar dois tipos de processos bastante comuns envolvendo substâncias homogêneas. O primeiro é a
expansão livre de um gás inicialmente confinado em um certo volume e então, é permitido se expandir e ocupar
um volume maior. Neste caso, perguntamos pelas condições de equilíbrio que caracterizam o estado do sistema
após a expansão. O segundo é o processo Joule-Thomson onde fazemos um gás passar por uma constrição que
pode ser representada por uma barreira porosa. A introdução desta constrição introduz variação na temperatura
e pressão do gás antes e depois de passar pela barreira. Este processo pode ser utilizado para esfriar ou aquecer
gases em sistemas como refrigeradores.
4.9.1
Expansão livre
Considere um gás confinado em um dos lados de uma câmara conforme mostrado na Fig. 4.1. Após a válvula ser
aberta, o gás irá se expandir e ocupar todo o volume da câmara. Neste caso, o gás irá assumir uma temperatura
T2 e o volume V2 da câmara, considerando que o mesmo tinha temperatura T1 e volume V1 antes da válvula ser
aberta.
Para determinar a temperatura e pressão finais, precisamos lembrar as condições sob as quais a expansão
ocorreu. Primeiramente, a câmara está isolada termicamente o que significa que não há trocas de calor assim,
Q=0
CAPÍTULO 4. TERMODINÂMICA E SUAS APLICAÇÕES
132
e desde que, inicialmente a segunda partição da câmara está vazia, então podemos escrever:
W =0
pois o gás não realiza trabalho na expansão. Em termos mais simples, o gás não precisa “empurrar" nada na sua
frente para se expandir pois só temos vácuo.
Considerando que a capacidade térmica do reservatório é desprezível, a energia da câmara não muda. Assim,
a variação da energia interna pode ser determinada a partir da primeira lei da termodinâmica
∆Ē = E2 − E1 = Q − W = 0
E(T2 , V2 ) = E(T1 , V1 )
(4.58)
onde definimos Ei = E(Ti , Vi ).
Para prever o resultado de um experimento, é necessário conhecer a energia interna do gás E(T, V ) como
função de temperatura e volume. Se conhecemos os valores de T1 , V1 e V2 , a Eq. (4.58) nos permite relacionar
estas variáveis permitindo-se determinar o valor da temperatura T2 .
Para um gás ideal a energia não depende do volume do gás pois as moléculas não interagem (lembre-se do
cálculo do número de estados acessíveis para um gás ideal). Assim, a condição dada pela Eq. (4.58) toma a forma
mais simples:
E(T2 ) = E(T1 )
o que é satisfeita somente quando
T1 = T2 .
Vemos, portanto, que a expansão livre de um gás ideal não modifica sua temperatura. No entanto, para um gás
real, podemos fazer o gráfico da energia em função da temperatura para diferentes valores de V . Destes gráficos
podemos prever o valor da temperatura após a expansão. Outra maneira de se determinar a temperatura final, é
através do gráfico em um diagrama T × V onde o conjunto de pontos para E constante forma uma curva bem
definida. Isto é análogo, por exemplo, a uma linha de temperatura constante em um diagrama p × V .
4.9.2
Processo de Joule-Thomson
Nesta seção consideramos um processo através do qual um gás passa através de um tampão poroso situado dentro
de um cano isolado adiabaticamente (Fig. 4.2).
O fluxo de gás constante é mantido através do tampão mantendo-se uma diferença de pressão nos dois lados
do cano, conforme mostra a Fig. 4.2. Como conseqüência, existe uma diferença de temperatura associada que
4.9. EXPANSÃO LIVRE E O PROCESSO DE JOULE-THOMSON
133
também é constante no regime estacionário. Consideramos que nesta situação não existe fluxo de calor do gás para
as paredes do cano cuja distribuição de temperatura permanece fixa. Assim, a variação da energia interna do gás
entre os dois lados do tampão é dada por:
∆E = E(T2 , p2 ) − E(T1 , p1 ).
(4.59)
isolante térmico
fluxo de gás
tampão poroso
Figura 4.2: Representação esquemática do processo Joule-Thomson. Um fluxo de gás passa através de um tampão poroso
devido à diferença de pressão entre os dois lados do cano. Note que a massa de gás ocupa um volume V1 no lado em que a
pressão é p1 e ocupa um volume V2 no lado em que a pressão é p2 . Como resultado, o trabalho realizado pelo gás é dado
por p2 V2 − p1 V1 . O resultado do trabalho na ausência de transferência de calor é igual a variação da energia interna do gás
nos dois lados do tampão que corresponde a diferentes temperaturas (ilustrada pelos termômetros que medem temperaturas
diferentes T1 e T2 ).
Neste processo, a quantidade de gás é transferida de um lado para outro através do trabalho realizado pela
diferença de pressão entre os dois lados do tampão. Este trabalho líquido é composto por duas contribuições: o
trabalho realizado sobre a massa de gás devido ao gás atrás do volume; o trabalho realizado pela massa de gás
sobre o que está a sua frente. Esta quantidade de trabalho líquida pode então ser escrita por:
W = p2 V 2 − p1 V 1 .
Neste processo, o calor não é absorvido nem é cedido pelo gás, assim, podemos escrever:
Q=0
o que nos permite escrever:
∆E = Q − W = −W
CAPÍTULO 4. TERMODINÂMICA E SUAS APLICAÇÕES
134
e substituindo-se o valor do trabalho, segue que:
∆E = −p2 V2 + p1 V1
e como ∆E = E2 − E1 , assim,
E2 − E1 = −p2 V2 + p1 V1
o que nos leva à seguinte igualdade:
E2 + p2 V2 = p1 V1 + E1 = constante.
Lembrando as definições dos potenciais termodinâmicos, identificamos a quantidade E + pV como sendo a
entalpia H, assim, temos que:
H = constante.
ou ainda
H(T1 , p1 ) = H(T2 , p2 ).
(4.60)
Assim, a Eq. (4.60) em um processo Joule-Thomson é mantida constante. Esta condição nos permite prever,
por exemplo, a variação da temperatura quando o gás passa pelo tampão poroso dado que saibamos as pressões
p1 e p2 e a temperatura inicial T1 . Com efeito, se plotamos os valores de temperatura e pressão em um diagrama
p × T , iremos obter uma curva cujos pontos terão os mesmos valores da entalpia.
No caso específico de um gás ideal, temos que a entalpia Hgd é dada por:
Hgd = E + pV = E(T ) + nRT = Hgd (T )
onde usamos a lei dos gases ideais pV = nRT , com n sendo o número de moles.
Vemos então que no caso de um gás ideal, a entalpia depende apenas da temperatura e, com isso, a condição
dada pela Eq. (4.60) se reduz a:
H(T1 ) = H(T2 ).
A condição dada pela Eq. (4.61) é satisfeita somente quando
T1 = T2
ou seja, um processo Joule-Thomson envolvendo um gás ideal não modifica a temperatura do gás.
(4.61)
4.9. EXPANSÃO LIVRE E O PROCESSO DE JOULE-THOMSON
135
No caso mais geral, podemos construir curvas da temperatura versus pressão para valores fixos de entalpia.
Com isso, os valores iniciais T1 e p1 fixam um valor particular da entalpia, e portanto, uma curva de entalpia
em particular. Para o processo descrito acima, devemos terminar em cima da mesma curva desde que a entalpia
permanece constante no processo de Joule-Thomson. A temperatura final T2 pode ser lida diretamente da curva
para qualquer valor da pressão p2 .
Na Fig. 4.3 são mostradas várias curvas de entalpia constante referentes a processos Joule-Thomson. Notamos
que elas apresentam um valor máximo para valores particulares de pressão e temperatura. Conseqüentemente, é
possível obter uma situação em que a temperatura final do gás pode ser maior, menor ou igual à temperatura inicial
— antes de passar pelo tampão poroso. Para diferenciar estas situações, olhamos para a derivada da pressão em
relação à temperatura com a entalpia constante (∂p/∂T )H , que é essencialmente, a inclinação da curva da entalpia.
Esta quantidade é essencial para caracterizar o processo e a chamamos de coeficiente de Joule-Thomson:
(
µ≡
∂p
∂T
)
.
(4.62)
H
Vemos então que se µ > 0, então para p2 < p1 a temperatura final é menor do que a inicial; se µ < 0 temos o
Figura 4.3: Conjunto de curvas de entalpia constante. Todas as curvas apresentam um ponto de máxima para um par de
valores de pressão e temperatura. A linha que conecta estes pontos é a chamada curva de inversão que separa duas regiões:
uma em que o coeficiente de Joule-Thomson (µ) é negativo e outra região em que o coeficiente de Joule-Thomson é positivo.
inverso, ou seja, a temperatura final aumenta em decorrência da redução pressão e, finalmente, quando µ = 0 a
temperatura não muda.
No gráfico da Fig. 4.3, é possível perceber uma linha ligando os pontos de máximo que divide as duas regiões
onde as inclinações das curvas de entalpia são diferentes. Esta linha é chamada de curva de inversão. Vamos obter
CAPÍTULO 4. TERMODINÂMICA E SUAS APLICAÇÕES
136
uma expressão para o coeficiente de Joule-Thomson µ, e que por conseqüência, nos permitirá determinar a curva
de inversão.
Começamos considerando a equação fundamental:
dE = T dS − pdV
ou seja,
dE = T dS − [d(pV ) − V dp] = T dS − d(pV ) + V dp
o que nos permite escrever
d(E + pV ) = T dS + V dp = dH = 0
onde consideramos que H = E + pV é constante em um processo Joule-Thomson assim dH = 0.
Expressando a entropia como uma função da pressão e temperatura S = S(T, p), podemos escrever:
[(
T
T dS + V dp = 0
∂S
∂T
)
(
dT +
p
∂S
∂p
]
)
dp + V dp = 0
T
e identificando a capacidade térmica a pressão constante, podemos escrever:
[ (
Cp dT + T
∂S
∂p
]
)
+ V dp = 0
T
e escrevendo dT = (∂T /∂p)H dp temos ainda:
{
(
Cp
∂T
∂p
[ (
)
+ T
H
∂S
∂p
]}
)
+V
dp = 0
T
o que nos permite escrever o coeficiente de Joule-Thomson na forma:
(
µ=
∂T
∂p
)
[ (
=−
H
1
T
Cp
∂S
∂p
)
]
+V .
T
Resta agora determinar a derivada da entropia em relação à pressão. Isto é realizado através da relação de
Maxwell:
(
∂S
∂p
)
(
=−
T
∂V
∂T
)
= −V α
p
e substituindo na expressão para µ obtemos:
µ=−
1
[−αT V + V ]
Cp
4.10. MÁQUINAS TÉRMICAS
137
µ=
V
[αT − 1]
Cp
(4.63)
No caso do gás ideal, o coeficiente de expansão térmica é o inverso da temperatura α = T −1 (verifique este
resultado!). Com isso, segue que µ = 0 como era esperado. A curva de inversão pode ser facilmente determinada
a partir da equação:
α=
4.10
1
,
T
caso geral. Localização da curva de inversão.
Máquinas Térmicas
Um máquina térmica é um dispositivo que retira calor do ambiente e realiza trabalho na forma útil. As máquinas
térmicas usam uma “substância de trabalho" que opera em um ciclo, ou seja, uma série de processos termodinâmicos, chamados tempos, voltando repetidamente a cada estado de ciclo.
Vamos aplicar as leis da termodinâmica para alguns exemplos de máquinas térmicas.
4.10.1
A máquina de Carnot
Aqui vamos considerar um protótipo de máquina térmica mais simples possível que chamamos de máquina ideal
ou máquina de Carnot, i.e., uma máquina cujos processos termodinâmicos são reversíveis e as transferências de
energia são realizadas sem perdas por atrito e turbulência. Este tipo de análise nos permite analisar o caráter geral
de uma máquina térmica sem as complicações de uma máquina real. Este exemplo, portanto, é apenas teórico.
A máquina térmica chamada máquina de Carnot, foi desenvolvida pelo engenheiro e cientista francês Sadi
Carnot em 1824. Esta máquina funciona retirando-se uma quantidade de calor QQ de um reservatório mantido a
uma temperatura fixa TQ e transformando parte deste calor em trabalho W e o restante é fornecido a um outro
reservatório térmico a uma temperatura mais baixa TF .
Uma realização física de uma máquina ideal é o exemplo do gás confinado em um cilindro com um êmbolo
como já discutido em casos anteriores. O cilindro é isolado termicamente em todos os lados exceto na base onde
existe uma parede diatérmica. A esta parede podemos conectar duas fontes de calor a temperaturas TQ e TF e
ainda uma parede isolante. A máquina opera de acordo com o ciclo mostrado na Fig. 4.4 chamado de ciclo de
Carnot. O ciclo é percorrido no sentido horário e é formado por quatro processos termodinâmicos: dois processos
isotérmicos (de a até b e de c até d) e dois processos adiabáticos (de b até c e de d até a). Abaixo, damos uma
descrição de cada processo termodinâmico:
CAPÍTULO 4. TERMODINÂMICA E SUAS APLICAÇÕES
138
Q
Q
F
Figura 4.4: Um diagrama p − V do ciclo seguido pelo fluido de trabalho da máquina de Carnot. O ciclo é formado por duas
isotermas (ab e cd) e duas adiabáticas (dc e da). A área sombreada limitada pelo ciclo é igual ao trabalho W útil realizado
pela máquina de Carnot.
processo a → b : Uma quantidade de calor QQ é fornecida ao gás que se expande de um volume inicial Va até
um volume Vb . Como o gás está a uma temperatura fixa TQ , temos uma expansão isotérmica. Consideramos
que este processo é realizado de maneira lenta de modo que o mesmo é reversível.
processo b → c : Neste processo, trocamos o reservatório térmico na base do cilindro por uma placa isolante.
Com isso, o gás continua se expandindo de um volume Vb a um volume Vc , mas agora em um processo
adiabático. Como não existe troca de calor neste processo, a energia interna do gás diminui e a temperatura
cai para o valor TF .
processo c → d : Agora retiramos a placa isolante e colocamos um reservatório térmico mantido em uma temperatura igual à do gás, i.e., com uma temperatura TF . Após isso, comprimimos o gás de modo que este tem
seu volume reduzido do valor Vc para o valor Vd . Como sabemos, a compressão do gás tende a aumentar
a sua energia interna e, portanto, a sua temperatura. No entanto, o reservatório térmico acoplado ao gás
garante que no processo a temperatura é mantida constante através da extração de uma quantidade de calor
QF necessária para manter a energia interna constante. Assim, este processo é uma compressão isotérmica.
processo d → a : O gás é novamente isolado do ambiente colocando-se a placa isolante na base do cilindro. Após
isso, o gás é comprimido de maneira adiabática desde o valor inicial Vd até o valor final Va . Desde que agora
o gás está isolado, a compressão aumenta a energia interna do gás fazendo que sua temperatura aumente do
valor inicial TF até o valor final TQ . Assim, o estado final do gás no ciclo coincide com o estado inicial de
4.10. MÁQUINAS TÉRMICAS
139
onde partiu. Portanto, colocando o gás novamente em contato com o reservatório térmico a temperatura TQ
podemos reiniciar o ciclo termodinâmico.
Observações:
• O trabalho líquido produzido no ciclo de Carnot é dado pela área do circuito fechado. Este trabalho é
positivo porque a área sob a curva do processo de expansão (a → b → c) é maior do que a área delimitada
pelo processo de compressão (c → d → a). Este trabalho é usado para elevar um objeto, rodar um motor,
etc. É o que chamamos de trabalho útil;
• As transferências de calor ocorrem apenas nos processos isotérmicos e as mudanças na temperatura somente
nos processos adiabáticos de modo que não se perca nenhuma energia.
Em resumo, fornecemos calor de uma fonte a temperatura TQ para uma fonte fria a temperatura TF e extraímos
um trabalho útil W . Na Fig. 4.5 temos um esquema resumido da máquina de Carnot.
No caso em que o ciclo é realizado no sentido contrário, temos o processo inverso, i.e., aplicamos um trabalho
W de modo a retirar calor de um fonte fria e adicionar o mesmo na fonte quente, assim, temos um refrigerador
ideal.
TQ
QQ
QF
TF
Figura 4.5: Diagrama ilustrando os elementos de uma máquina de Carnot. As duas setas pretas no centro indicam o ciclo
termodinâmico que retira o calor QQ do reservatório superior a uma temperatura TQ que é parte convertido em trabalho
W e parte entregue ao reservatório a uma temperatura inferior TF .
CAPÍTULO 4. TERMODINÂMICA E SUAS APLICAÇÕES
140
4.10.2
Entropia do ciclo de Carnot
Temos que:
∫
∆S =
i
f
dQ
T
que mostra que qualquer processo em que exista uma troca de energia na forma de calor tem uma variação da
entropia. Considerando o ciclo de Carnot, temos que no processo a → b, o sistema absorve calor a uma temperatura
fixa TQ , logo ∆S > 0, pois QQ > 0. No processo c → d, o sistema cede calor QF a uma temperatura TF , assim,
∆S < 0 neste caso.
O trabalho útil W pode ser determinado através da 1a lei da termodinâmica:
∆Eint = Q − W
e como o ciclo é fechado, podemos escrever ∆Eint = 0, assim:
W = Q.
Agora, Q é o calor líquido trocado entre o reservatório e o sistema por ciclo. Assim, o sistema recebe uma
quantidade QQ do reservatório quente e cede uma quantidade QF para o reservatório frio, então podemos escrever
o trabalho útil por ciclo na forma:
W = |QQ | − |QF |.
(4.64)
Variações na entropia
Voltando à questão da variação da entropia, vimos que existem duas transferências de calor nos processos isotérmicos e nenhuma variação nos processos adiabáticos. Assim, desde que os processos são isotérmicos e conhecemos
o sentido da transferência do calor, podemos escrever a variação da entropia na forma:
∆S =
|QQ | |QF |
−
TQ
TF
(4.65)
E como o ciclo é fechado e a entropia é uma variável de estado, então sabemos que ∆S = 0, assim, temos a
seguinte igualdade:
|QQ | |QF |
=
TQ
TF
(4.66)
Desde que TQ > TF a Eq. (4.66) nos mostra que |QQ | > |QF |, assim, temos uma quantidade maior de
energia extraída do reservatório quente do que fornecida à fonte fria. Isso era esperado desde que pela conservação
4.11. REFRIGERADORES
141
da energia, válida neste processo reversível, a quantidade extraída de energia deve ser igual à soma da energia
cedida na forma de calor para a fonte fria com o trabalho útil realizado pelo sistema. Note que no caso de um
processo irreversível, caracterizado por aumento da entropia, parte da quantidade de calor extraída é transformada
no aumento de entropia do sistema e parte vai para a fonte fria. O que vai para o aumento da entropia do sistema
não é convertido em trabalho útil e assim, esta quantidade representa perdas no ciclo.
4.10.3
Eficiência de uma máquina de Carnot
De acordo com o que foi dito sobre o ciclo de Carnot, é natural medir o rendimento da máquina térmica pela razão
da energia extraída na forma de calor QQ pelo trabalho W útil realizado pela máquina, assim, podemos escrever:
ε=
energia utilizada
|W |
=
energia adquirida |QQ |
que é a eficiência de uma máquina de Carnot.
Podemos reescrever a eficiência ε, substituindo a expressão para o trabalho W obtida acima:
ε=
|QQ | − |QF |
|QF |
= 1−
|QQ |
|QQ |
e usando a igualdade da entropia dada pela Eq. (4.66) podemos escrever ainda:
ε = 1−
TF
TQ
Vemos que como TF < TQ , a máquina de Carnot tem necessariamente uma eficiência menor do que 100%. Os
100% seriam atingidos apenas nos limites TF = 0 ou TQ → ∞. É importante notar que as temperaturas estão em
kelvins, e assim, o limite do zero absoluto nunca é atingido de modo que o rendimento nunca será de 100%. Além
disso, conforme mostraremos a seguir, qualquer máquina real apresenta uma eficiência menor do que a máquina
de Carnot.
Este fato, nos permite enunciar a 2a lei de termodinâmica em termos da eficiência de máquinas térmicas:
“Não existe uma série de processos cujo único resultado seja a conversão total em
trabalho da energia contida em uma fonte de calor ”
4.11
.
Refrigeradores
Já comentamos rapidamente sobre refrigeradores, quando dissemos que podemos construir um através da inversão
do ciclo de Carnot executando os processos no sentido anti-horário na Fig. 4.4. A idéia então é remover o calor
do reservatório frio a uma temperatura TF através da introdução de um trabalho externo W e adicioná-lo à fonte
CAPÍTULO 4. TERMODINÂMICA E SUAS APLICAÇÕES
142
quente TQ . No caso de um refrigerador doméstico, o trabalho externo é realizado por um compressor elétrico para
transferir energia do compartimento onde estão guardados os alimentos (fonte fria) para o ambiente (fonte quente).
No caso de um ar condicionado a única diferença é que a fonte fria é o ambiente a ser resfriado e a fonte quente
é parte externa à este ambiente. Um aquecedor também funciona da mesma forma, no entanto, os ambientes são
invertidos. Na Fig. 4.6 mostramos um diagrama esquemático de um refrigerador ideal, ou refrigerador de Carnot,
que é similar à máquina térmica de Carnot exceto pelo sentido das setas.
TQ
QQ
QF
TF
Figura 4.6: Diagrama ilustrando os elementos de uma refrigerador de Carnot. As duas setas pretas no centro indicam o
ciclo termodinâmico que retira o calor QF do reservatório inferior a uma temperatura TF , através da aplicação de um
trabalho externo W , e então é entregue ao reservatório a uma temperatura TQ .
Note que em um refrigerador, da mesma forma que na máquina de Carnot, todos os processos são reversíveis, e
assim, as transferência de energia na forma de calor e trabalho são realizadas sem perdas por atrito ou turbulência.
Esta condição é necessária para manter a reversibilidade do ciclo. Não vamos considerar a análise do ciclo de
Carnot neste caso, porque é equivalente ao caso da máquina térmica exceto pelo sentido que agora é anti-horário.
Aqui vamos definir o chamado desempenho do refrigerador em termos da razão da energia utilizada QF pelo
trabalho aplicado no processo W :
K=
energia utilizada
|QF |
=
energia adquirida
|W |
onde K é o chamado coeficiente de desempenho do refrigerador. Note que não estamos falando de eficiência como
no caso da máquina térmica, são definições diferentes, embora o intento seja o mesmo de quantificar a qualidade
do dispositivo3 . Aplicando a 1a lei da termodinâmica, podemos escrever o trabalho em termos das diferenças entre
3
Se falamos de eficiência do refrigerador então temos que usar a razão W/|QQ | que é o ε.
4.12. EFICIÊNCIA DE MÁQUINAS TÉRMICAS REAIS
143
o calor absorvido pelo calor cedido, desde que a energia interna não muda no processo reversível. Assim, temos
W = |QQ | − |QF |, o que nos permite escrever:
K=
|QF |
|QQ | − |QF |
Além disso, como o refrigerador de Carnot é simplesmente a máquina de Carnot operando em sentido contrário, então, podemos eliminar o calor em termos da temperatura dos reservatórios:
K=
TF
TQ − TF
e vemos então que obtemos um melhor desempenho quando as duas fontes de calor apresentam temperaturas
próximas uma da outra.
Note que um refrigerador perfeito seria aquele em que não seria necessário nenhum trabalho externo para
remover o calor da fonte fria para colocar na fonte quente. No entanto, isso é impossível. Podemos ver isso
considerando a variação da entropia do sistema. Se não temos trabalho, então todo o calor é extraído da fonte fria
e assim, a variação da entropia dada pela Eq. (4.65) fica na forma:
∆S =
|QQ | |QF |
−
TQ
TF
e fazendo |QQ | = |QF | = |Q|, então
∆S =
|Q| |Q|
−
TQ TF
(refrigerador perfeito)
e como TF < TQ então chegamos a conclusão de que ∆S < 0 o que violaria a 2a lei da termodinâmica pois estamos
considerando o sistema+fonte no cálculo da variação da entropia.
Assim, chegamos a uma terceira maneira de enunciar a 2a lei da termodinâmica:
“ Não existe uma série de processos cujo único resultado seja transferir energia
na forma de calor de uma fonte fria para uma fonte quente”.
O que nos indica que não existe refri-
geradores perfeitos.
4.12
Eficiência de Máquinas Térmicas Reais
Não é possível construir uma máquina com um eficiência maior do que a máquina de Carnot. Isso pode ser
demonstrado considerando a hipótese contrária e então verificando que isso leva a um absurdo. Vamos supor então
que temos uma máquina térmica com eficiência εX > εC , onde εX é a eficiência da máquina hipotética e εC é a
eficiência da máquina de Carnot.
CAPÍTULO 4. TERMODINÂMICA E SUAS APLICAÇÕES
144
Partimos então da condição:
εX > ϵ C .
(4.67)
Esta máquina então retira calor Q′Q de um reservatório quente e parte deste calor é transformado em trabalho
W e o restante Q′F é transferido para um reservatório frio.
Consideremos então que o trabalho realizado pela máquina X é usado em um refrigerador de Carnot como o
que acabamos de descrever na seção anterior. Então, temos um sistema fechado como o esquematizado na Fig.
4.7. De acordo com a Eq. (4.67), devemos ter:
|W |
|W |
>
.
′
|QQ | |QQ |
TQ
Q’Q
QQ
Máquina
Refrigerador
de Carnot
Refrigerador
perfeito
QF
Q’F
TF
Figura 4.7: (a) máquina térmica X acoplada a um refrigerador Carnot. (b) No caso de uma máquina X com eficiência
maior do que a máquina de Carnot, a combinação da figura (a) é equivalente a um refrigerador perfeito que é proibido pela
2a lei da termodinâmica.
Da desigualdade acima, segue que:
|Q′Q | < |QQ |.
(4.68)
4.12. EFICIÊNCIA DE MÁQUINAS TÉRMICAS REAIS
145
Usando a 1a lei da termodinâmica, podemos relacionar a quantidade de calor líquida nas duas máquinas.
Assim, na máquina X, o trabalho é dado por:
W = |Q′Q | − |Q′F |
e também,
W = |QQ | − |QF |
e eliminando W entre as duas equações, segue que:
|Q′Q | − |Q′F | = |QQ | − |QF |
ou ainda,
|QQ | − |Q′Q | = |QF | − |Q′F | = Q
e de acordo com a desigualdade dada pela expressão (4.68), Q > 0. A equação acima nos indica que o efeito do
refrigerador de Carnot e da máquina X trabalhando em conjunto é equivalente a um refrigerador ideal retirando
calor de uma fonte fria para uma fonte quente sem a necessidade de um trabalho externo. Isto equivale a um
refrigerador perfeito que já vimos não ser possível desde que viola a 2a lei da termodinâmica.
Exemplos
1. O ciclo Diesel, representado ma Fig. 4.8, onde AB e CD são adiabáticas, esquematiza o que ocorre num motor
Diesel de 4 tempos. A diferença em relação ao ciclo de Otto (problema da prova) é que a taxa de compressão
rc = VA /VB adiabática é maior, aquecendo mais o ar e permitindo que ele inflame o combustível injetado sem
a necessidade de uma centelha de ignição: isto ocorre a pressão constante, durante o trecho BC; a taxa de
expansão adiabática associada a CD é re = VA /VC . (a) Mostre que a eficiência do ciclo Diesel é dado por:
1
1
γ − γ
1
re rc
ε = 1−
γ 1 − 1
re rc
O ciclo funciona da seguinte forma: no processo AB temos uma compressão adiabática que eleva a pressão
do sistema para o valor pA e um volume VA . Neste caso, como nenhum calor é trocado com o ambiente, todo
CAPÍTULO 4. TERMODINÂMICA E SUAS APLICAÇÕES
146
B
Expansão a
pressão constante
C
Expansão
adiabática
D
Resfriamento a
volume constante
Compressão
adiabática
A
Figura 4.8: Veja exemplo 1.
o trabalho realizado é convertido em um aumento da temperatura do sistema. A seguir, temos uma expansão a
pressão constante e um calor QBC deve ser adicionado ao sistema para compensar a perda de energia interna
devido à expansão do gás até o volume VC . Uma vez que o ponto C é atingido, ocorre mais uma expansão
adiabática que leva o sistema do ponto C ao ponto D. Neste caso, a temperatura do sitema é reduzida desde que
não há trocas de calor neste processo. Finalmente, temos uma redução da pressão do sistema a volume constante
que leva o sistema do ponto D ao ponto A, onde o ciclo é reiniciado. Note que neste processo DA, o sistema libera
uma quantidade de calor QDA para garantir que ocorra uma redução de pressão desde que o volume é fixo.
A eficiência da máquina Diesel é portanto, dada por:
ε=
W
QBC
onde W é trabalho útil obtido durante o ciclo e QAB é o calor adicionado na etapa de expansão a pressão constante.
De acordo com o enunciado do problema, temos as seguintes relações:
VA
= rc
VB
VA
= re
VC
(4.69)
(4.70)
Como objetivamos determinar a eficiência precisamos calcular o trabalho e o calor injetado. Vamos começar
4.12. EFICIÊNCIA DE MÁQUINAS TÉRMICAS REAIS
147
com o cálculo do trabalho. Este é dado pela soma:
W = WAB + WBC + WCD
Vamos calcular cada termo separadamente. Comecemos com WAB :
∫
VB
WAB =
p dV
VA
Agora precisamos da relação entre a pressão e o volume. Lembrando que o processo é adiabático, então
podemos escrever:
pA VAγ = pV γ
∴
p=
pA VAγ
Vγ
assim,
WAB =
pA VAγ
∫
VB
VA
dV
= pA VAγ
γ
V
(
VB1−γ − VA1−γ
1−γ
)
e usando a Eq. (4.69), podemos eliminar o volume VA = rc VB da equação acima:
(
WAB =
pB VBγ
VB1−γ − rc1−γ VB1−γ
1−γ
)
onde usamos também a igualdade pA VAγ = pB VBγ . Após alguma álgebra podemos escrever:
WAB
(
)
(
)
pB VB
1
=−
1 − γ−1
γ −1
rc
e como pB VB = nRTB , podemos escrever ainda
WAB
nRTB
1
=−
1 − γ−1
γ −1
rc
(4.71)
Vamos agora determinar o trabalho no processo BC. Neste caso temos um processo a volume constante,
assim, é bastante simples calcular a integração:
(
WBC = pB (VC − VB ) = pB VB
VC
−1
VB
)
mas a razão no parênteses pode ser escrita como:
VC
VC VA
rc
=
=
VB
VA VB
re
e usando a lei dos gases ideais, segue que:
(
WBC = nRTB
rc
−1
re
)
(4.72)
CAPÍTULO 4. TERMODINÂMICA E SUAS APLICAÇÕES
148
Finalmente, vamos determinar o trabalho realizado no processo DA que é uma compressão adiabática. Como
o cálculo é similar ao processo AB:
WCD =
pC VCγ
∫
VD
VC
dV
= pC VCγ
Vγ
(
VD1−γ − VC1−γ
1−γ
)
e como
VD = VA
podemos escrever:
(
WCD =
pC VCγ
VA1−γ − VC1−γ
1−γ
)
mas VA = re VC , logo:
(
WCD =
pC VCγ
re1−γ VC1−γ − VC1−γ
1−γ
)
ou seja,
(
WCD = pC VC
re1−γ − 1
1−γ
(
pC VC
1
WCD =
1 − γ−1
γ −1
re
)
)
Para uniformizar a fórmula, escrevemos:
pC VC = pB VC = nRTB
VC
rc
= nRTB
VB
re
o que nos permite escrever:
[
WCD =
(
nRTB rc
1
1 − γ−1
γ − 1 re
re
)]
(4.73)
O trabalho líquido pode agora ser determinado somando as três contribuições dadas pelas Eqs. (4.71), (4.72) e
(4.73):
W = WAB + WBC + WCD
(
)
(
)
[
(
nRTB
1
nRTB rc
1
rc
W =−
1 − γ−1 + nRTB
−1 +
1 − γ−1
γ −1
r
γ
−
1
r
rc
re
e
e
)]
4.12. EFICIÊNCIA DE MÁQUINAS TÉRMICAS REAIS
(
)
149
(
)
[
(
nRTB
1
nRTB
rc
nRTB rc
1
1 − γ−1 +
(γ − 1) − (γ − 1) +
W =−
1 − γ−1
γ −1
γ −1
re
γ − 1 re
rc
re
(
rc rc
nRTB
1
rc rc
W=
−1 + γ−1 + γ − − γ + 1 + − γ
γ −1
re re
re re
rc
(
nRTB
W=
γ −1
W=
rc
rc
γ−1 + γ r − γ − r γ
e
rc
e
1
(
nRTB
γ −1
rc
rc
rc
+γ −γ − γ
rcγ
re
re
)]
)
)
)
(4.74)
Vamos agora determinar o calor injetado no processo BC. Para isso, notamos que a injeção de calor ocorre em
um processo a pressão constante. Desde que a injeção de calor provoca uma variação da temperatura do sistema,
então escrevemos:
QBC = ncP (TC − TB )
Como sabemos a razão entre os calores específicos:
γ=
cP
cV
e,
cP = cV + R
então podemos escrever o calor específico a pressão constante na forma:
cP =
cP
+R
γ
∴
cP =
γR
γ −1
com isso, temos:
(
QBC =
)
nRTB
TC
γ
−1
γ −1
TB
Agora precisamos a razão TC /TB , para isso usamos a lei dos gases ideais:
pC VC
nRTC
=
pB VB
nRTB
∴
TC
VC
rc
=
=
TB
VB
re
CAPÍTULO 4. TERMODINÂMICA E SUAS APLICAÇÕES
150
e assim, a expressão para o calor toma a forma:
(
QBC =
)
rc
nRTB
γ
−1
γ −1
re
(4.75)
Agora podemos substituir as Eqs. (4.74) e (4.75) na equação para eficiência da máquina Diesel:
rc
rc
rc
−γ − γ
γ +γ
W
r
r
) re
ε=
= c ( e
rc
QBC
γ
−1
re
(
)
rc
rc
rc
−1 − γ
γ +γ
r
( re
) re
ε= c
rc
γ
−1
re
rc rc
−
rcγ reγ )
ε = 1+ (
rc
−1
γ
re
rc
rc
−
γ
1 γ
ε = 1 − rre c rc
γ
re
−1
1
1
γ − γ
1
re rc
ε = 1−
γ 1 − 1
re rc
4.13
(4.76)
Condições de Equilíbrio e Transições de Fase
Já discutimos, no contexto da Física Estatística, que o equilíbrio era caracterizado por um valor máximo do número
de estados acessíveis ao sistema. Com isso, podemos também afirmar que no equilíbrio a entropia deve apresentar
um valor máximo pois já mostramos que
S = kB ln Ω
(4.77)
onde kB é a constante de Boltzmann e Ω é o número de estados acessíveis. Esta condição é válida para um sistema
isolado, ou seja, que não troca calor ou realiza trabalho.
Chamamos a condição de máximo do número de estados acessíveis como “condição de máxima entropia".
Este princípio nos permite determinar outras quantidades de equilíbrio de maneira sistemática. Existem outros
princípios alternativos, relacionados ao princípio de de máxima entropia, que são igualmente importantes. Vamos
considerá-los a seguir.
4.13. CONDIÇÕES DE EQUILÍBRIO E TRANSIÇÕES DE FASE
4.13.1
151
Sistemas em contato com um reservatório à temperatura constante
A condição de máxima entropia é válida para um sistema isolado, i.e., com energia constante. A partir deste
princípio consideramos casos mais gerais de interesse prático. Por exemplo, um caso de interesse experimental é
aquele onde o sistema de interesse está em contato térmico com um reservatório de calor, ou seja, em que o sistema
é mantido à temperatura constante.
Para investigar as condições de equilíbrio vamos denotar o nosso sistema por A e o reservatório por A′ cuja
temperatura fixa é T0 . O sistema composto A(0) = A + A′ está isolado de modo que sua energia total é fixa em
E (0) . Após o equilíbrio entre A e A′ ser estabelecido, devemos ter no final do processo:
∆S (0) ≥ 0
que é escrito na forma:
∆S (0) = ∆S + ∆S ′ ≥ 0
onde ∆S é a mudança da entropia de A e ∆S ′ é a mudança da entropia de A′ . Mas se A absorve calor de A′ , então
a mudança da entropia de A′ será dada por:
∆S ′ = −
Q
T0
onde o sinal negativo indica que o calor é cedido pelo reservatório.
Podemos relacionar o calor cedido pelo reservatório com as propriedades do sistema A usando a primeira lei
da termodinâmica:
Q = ∆E + W
e assim, a variação da entropia do sistema combinado pode ser escrito como:
∆S (0) = ∆S −
∆S (0) = ∆S −
Q
≥0
T0
(∆E + W )
≥0
T0
ou seja,
T0 ∆S − ∆E − W
≥0
T0
∴
∆(T0 S − E) − W ≥ 0
CAPÍTULO 4. TERMODINÂMICA E SUAS APLICAÇÕES
152
onde usamos o fato da temperatura T0 ser constante e colocamos a variação evidência. Reconhecendo a da energia
livre de Helmholtz,
F0 = E − T0 S
podemos escrever:
−∆F0 − W ≥ 0.
Notamos que F0 é a energia livre de Helmholtz do sistema A quando a sua temperatura é igual à temperatura
do reservatório. Certamente, quando A e A′ não estão em equilíbrio então os sistemas têm temperaturas diferentes.
Como T0 > 0, então ∆S 0 ≥ 0 implica que:
−∆F0 ≥ W
(4.78)
o que nos mostra que o máximo trabalho realizado que pode ser feito pelo sistema A sobre o reservatório é −∆F0 .
O máximo é obtido quando temos uma igualdade na Eq. (4.78), válida quando o processo é reversível que, por sua
vez, ocorre quando processo é quasi-estático4 .
Se os parâmetros externos do sistema A são fixos, então W = 0, então podemos escrever:
∆F0 ≤ 0.
(4.79)
Vemos então que para um sistema em contato um reservatório, sua energia livre diminui. Com isso, inferimos
o seguinte resultado:
Se um sistema, cujos parâmetros externos estão fixos está em contato térmico com um
reservatório térmico, a situação de equilíbrio será caracterizada por um mínimo na sua
energia livre de Helmholtz
.
Isso pode ser escrito na forma:
F0 = mínimo
O mínimo da energia livre de Helmholtz é oriundo do fato de que quando o sistema A está em contato térmico
com o reservatório A′ , a energia livre diminui. A redução irá ocorrer até que o equilíbrio seja estabelecido quando
F0 atinge o valor mínimo.
4
Note que quando o sistema está completamente isolado, é dado por W = −∆E.
4.13. CONDIÇÕES DE EQUILÍBRIO E TRANSIÇÕES DE FASE
4.13.2
153
Sistema em contato térmico com um reservatório térmico a volume e pressão constantes
Vamos considerar agora que o sistema A está em contato térmico com um reservatório a temperatura T0 e a pressão
constante p0 . A diferença neste caso, é que além da temperatura temos também a pressão fixa. O sistema A′ é
tão grande que sua temperatura permanece invariável mesmo com a troca de calor com o sistema A; similarmente,
sua pressão permanece fixa mesmo com o trabalho realizado pelo sistema A. Assim, como antes, no equilíbrio a
variação da entropia do sistema combinado deve obedecer a segunda lei da termodinâmica, assim:
∆S (0) ≥ 0
que é escrito na forma:
∆S (0) = ∆S + ∆S ′ ≥ 0
e a variação na entropia do reservatório pode ainda ser expressa em termos do calor cedido ao sistema A
∆S (0) = ∆S −
Q
≥ 0.
T0
No contexto da física estatística provamos que a relação ∆S ′ = −Q/T0 é válida quando temos um reservatório
de calor. A novidade em relação ao caso anterior é que o calor recebido pode ser escrito como
Q = ∆E + p0 ∆V + W ∗
onde agora o trabalho é igual à variação da energia interna, somada ao trabalho realizado pelo sistema A devido à
sua variação de volume e a uma parcela que chamamos de W ∗ que seria um outro trabalho feito por A, como por
exemplo, um trabalho elétrico ou magnético. Com isso, podemos escrever:
∆S (0) = ∆S −
(∆E + p0 ∆V + W ∗ )
≥0
T0
ou ainda:
T0 ∆S − ∆E − p0 ∆V − W ∗
≥0
T0
e como T0 e p0 são constantes, podemos escrever ainda:
∆(T0 S − E − p0 V ) − W ∗
≥0
T0
ou seja,
−∆G0 − W ∗
≥0
T0
CAPÍTULO 4. TERMODINÂMICA E SUAS APLICAÇÕES
154
onde reconhecemos a energia livre de Gibbs para T = T0 e p = p0 :
G0 = E − T0 S + p0 V.
Assim, chegamos a seguinte condição:
−∆G0 ≥ W ∗
(4.80)
que mostra que o trabalho W ∗ máximo que pode ser realizado pelo sistema é igual à energia livre de Gibbs.
Se todos os parâmetros externos (exceto o volume) do sistema A são fixos, então W ∗ = 0 e assim, podemos
escrever que
∆G0 ≤ 0
o que nos permite concluir:
Se um sistema está em contato com um reservatório a temperatura e pressão constantes
de modo que pode realizar trabalho apenas via variação de volume, então o equilíbrio do
sistema será caracterizado por um valor mínimo da energia livre de Gibbs
.
Isso pode ser escrito na forma:
G0 = mínimo.
Os resultados acima permitem analisar o estado de equilíbrio em casos mais gerais onde os sistemas são
caracterizados por valores de temperatura e pressão constantes. A seguir, aplicamos estes conceitos na análise das
transições de fase onde uma substância pode modificar seu estado físico através da minimização de sua energia.
4.13.3
Aplicação dos princípios de energia mínima: transições de fase
Todas as substâncias podem existir em formas diferenciadas, chamadas fases, que correspondem a diferentes
estados de agregação das mesmas moléculas. Assim, uma determinada substância pode estar na forma sólida,
líquida ou gasosa dependendo de sua energia interna. A fase sólida é caracterizada por átomos ou moléculas
formando uma estrutura rígida. Na fase líquida, os átomos e moléculas apresentam maior mobilidade e energia de
modo que as estruturas formadas são transitórias e o líquido pode escoar. Na fase gasosa, a energia é ainda maior
e os átomos ou moléculas do gás não interagem exceto através de choques de curta duração.
O processo de transformação de uma fase sólida para uma fase líquida é chamada de fusão. Neste processo o
calor fornecido é usado para quebrar as ligações entre as moléculas do sistema. Um exemplo comum deste tipo de
4.13. CONDIÇÕES DE EQUILÍBRIO E TRANSIÇÕES DE FASE
155
transformação é a transformação do gelo em água. O processo de solidificação é o inverso do processo de fusão e
exige a retirada de energia do líquido na forma de calor para que a estrutura rígida volte a se formar.
A transformação da fase líquida para a fase gasosa é chamada de vaporização. Neste processo, energia é
fornecida à fase líquida para quebrar os aglomerados moleculares. O processo de condensação é o inverso onde
energia é retirada do gás para que este passe para a fase líquida.
Para aplicar os conceitos desenvolvidos na seção anterior, vamos considerar duas fases de uma mesma substância em contato com um reservatório com temperatura e pressão constantes, veja a Fig. 4.9. Estas fases serão
chamadas por fase 1 e fase 2. Seja N1 o número de moléculas da substância que estão na fase 1 e N2 o número de
moléculas na fase 2. Desde que as moléculas permanecem confinadas no sistema, então devemos ter
N = N1 + N2 = constante.
reservatório
temperatura, T0
pressão, p0
pistão
fase 2
fase 1
Figura 4.9: Sistema composto por uma substância encontrada em duas fases denominadas fase 1 e fase 2. O sistema
encontra-se em equilíbrio térmico com um reservatório com pressão p0 e temperatura T0 constantes.
Temos então as seguintes questões: no equilíbrio, caracterizado por uma temperatura T e pressão p, qual fase
estará presente? Somente a fase 1, a fase 2 ou ambas as fases? Para tentar responder esta questão, partimos do
princípio de mínimo da energia livre de Gibbs:
G = E − T S + pV = mínimo
CAPÍTULO 4. TERMODINÂMICA E SUAS APLICAÇÕES
156
que caracteriza o equilíbrio. A energia livre do sistema é dada pela soma:
G = G1 + G2
(4.81)
onde Gi é a energia livre de Gibbs da fase i. Como G é uma grandeza extensiva, então é proporcional ao número
de moléculas, assim, é conveniente escrever a energia livre dada pela Eq. (4.81) na forma:
G = N1 g1 + N2 g2
(4.82)
onde gi é a energia livre de Gibbs por molécula da fase i. Como G dever ser um mínimo no equilíbrio, então
podemos obter a partir da Eq. (4.82) a condição para a coexistência entre as duas fases, i.e., devemos ter:
dG = 0
coexistência das fases.
Aplicando esta condição na Eq. (4.82) temos que:
g1 dN1 + g2 dN2 = 0
e como N é uma constante então dN1 = −dN2 o que nos permite escrever:
(g1 − g2 )dN1 = 0
de onde obtemos:
g1 (T, p) = g2 (T, p),
condição para coexistência das fases
(4.83)
onde explicitamos a dependência das energias livres com a temperatura e pressão.
Após esta análise, temos as três possibilidades abaixo quando consideramos duas fases de uma substância em
contato com um reservatório térmico com pressão constante:
(a) g1 < g2 . Neste caso, a substância passa para a fase 1 de maneira que a energia livre total é dada por G = N g1 ;
(b) g1 > g2 . Aqui a substância passa para a fase 2 de maneira que a energia livre total é dada por G = N g2 ;
(c) g1 = g2 . As fases coexistem de maneira que temos N1 moléculas na fase 1 e N2 moléculas na fase 2.
As duas primeiras alternativas indicam que a energia livre é dada pela soma das energias de todas as moléculas
de uma determinada fase. Como isso leva a um mínimo da energia total? Isso ocorre porque na passagem de uma
fase para outra, é necessária a remoção ou introdução de calor latente de transformação. Como resultado, quando
a energia livre de uma fase é menor do que a outra, todas as moléculas transicionam para a fase mais estável (fase
de menor energia) liberando uma energia na forma de calor latente.
4.13. CONDIÇÕES DE EQUILÍBRIO E TRANSIÇÕES DE FASE
157
Considerando-se os valores de temperatura e pressão, então podemos construir uma linha no diagrama T × p
em que a Eq. (4.83) é satisfeita. Esta linha é chamada de curva de equilíbrio e separa as regiões em que g1 < g2
(onde a fase 1 é a mais estável) e g1 > g2 (onde a fase 2 é a mais estável). O diagrama p × T é então chamado
de diagrama de fases. Na Fig. 4.10 temos a representação de um diagrama de fases com a curva de equilíbrio
separando as duas fases.
Figura 4.10: Diagrama de fases para onde pode-se observar duas regiões separadas pela curva de equilíbrio definida pela
condição g1 = g2 . Para valores de temperatura e pressão que estão localizados na região g1 < g2 a fase 1 é a fase estável;
na região g1 > g2 a fase estável é a fase 2.
Para caracterizar a transição de fase, vamos considerar dois pontos a e b da curva de equilíbrio (Fig. 4.10). No
ponto a, devemos ter:
g1 (T, p) = g2 (T, p)
e no ponto b temos ainda:
g1 (T + dT, p + dp) = g2 (T + dT, p + dp)
e subtraindo da equação anterior, podemos escrever:
dg1 (T, p) = dg2 (T, p).
(4.84)
Em virtude da definição de G(T, p), podemos escrever:
gi =
Gi Ei − T Si + pVi
=
,
Ni
Ni
i = 1, 2.
onde usamos o fato de que a pressão e a temperatura são iguais para ambas as fases. Podemos escrever gi na forma:
gi = εi − T si + pvi ,
i = 1, 2.
CAPÍTULO 4. TERMODINÂMICA E SUAS APLICAÇÕES
158
onde definimos εi = Ei /Ni , si = Si /Ni e vi = Vi /Ni , que são a energia, entropia e volume por moléculas.
Tomando a diferencial de gi , podemos escrever
dgi = dεi − si dT − T dsi + vi dp + pdvi ,
i = 1, 2.
e da primeira lei da termodinâmica,
dεi = T dsi − pdvi
assim, a diferencial da energia livre de Gibbs, toma a forma:
dgi = T dsi − pdvi − si dT − T dsi + vi dp + pdvi ,
dgi = −si dT + vi dp,
i = 1, 2.
i = 1, 2.
onde v2 = V2 /n. Substituindo esta expressão na Eq. (4.84), segue que:
−s1 dT + v1 dp = −s2 dT + v2 dp
ou ainda,
(v1 − v2 )dp = (s1 − s2 )dT
∴
(v1 − v2 )
dp
dT = (s1 − s2 )dT
dT
o que nos leva à seguinte igualdade:
dp
∆s
=
dT
∆v
(4.85)
onde ∆v = v1 − v2 e ∆s = s1 − s2 . Como a razão entre as densidades de entropia e volume é igual à razão entre
as variáveis extensivas, temos ainda:
dp
∆S
=
.
dT
∆V
(4.86)
A variação na entropia pode ser relacionada com o calor latente de transformação da fase 1 para a fase 2:
∆S =
L12
T
onde definimos L12 como o calor latente de transformação. Substituindo esta expressão em (4.86), obtemos a
relação final:
dp
L12
=
.
dT
T ∆V
que é a chamada equação de Clausius-Clapeyron.
(4.87)
4.13. CONDIÇÕES DE EQUILÍBRIO E TRANSIÇÕES DE FASE
4.13.4
159
Trocas de fase de uma substância simples
De modo geral, as substâncias podem ser encontradas nas suas três fases. Como um exemplo, vamos considerar
o diagrama de fase de uma substância simples como a água ilustrado na Fig. 4.11. No ponto denotado por t
(chamado ponto triplo) as três fases podem coexistir. Em outras palavras, as energias livres das três fases são
iguais e, portanto, podemos ter uma quantidade arbitrária de qualquer uma das fases contanto que a soma das
moléculas de água seja fixa — estamos considerando aqui uma situação em que a amostra de água esteja em
contato com um reservatório térmico a pressão e temperatura constantes, como antes.
No ponto denotado por c, a curva de equilíbrio líquido-gás acaba e a partir deste ponto as fases se transformam
uma na outra sem variação de entropia. Na realidade, a partir deste ponto temos uma fase fluida de um gás tão
denso que não conseguimos diferenciar se a fase é um vapor ou líquido. Na passagem de sólido para líquido
sempre temos uma variação de entropia o que equivale a dizer que sempre precisamos de calor latente associado a
esta transição. Na maioria das vezes o sólido se dilata na fusão, assim ∆V e ∆S são positivos. Como resultado,
a curva de equilíbrio apresenta uma derivada positiva. No caso da água, por outro lado, a curva apresenta uma
derivada negativa, conforme ilustrado na Fig. 4.11. Isso ocorre porque a água apresenta uma anomalia onde se
observa um aumento do volume quando a água passa para o estado sólido, isto é chamado de dilatação anômala da
água.
4.13.5
Cálculo aproximado da pressão de vapor
Vamos aplicar a equação de Clausius-Clapeyron para determinar a pressão de vapor de um gás em equilíbrio com
a sua fase líquida (ou sólida) a uma certa temperatura. Para aplicar a Eq. (4.87) vamos considerar que a fase 1
é a fase líquida (ou sólida) e a fase 2 é a fase gasosa. Notamos que a fase gasosa deve ocupar todo o volume do
recipiente enquanto que a fase líquida ocupa apenas uma fração do volume do recipiente. Desta forma, podemos
fazer a seguinte aproximação:
∆V = V2 − V1 ≈ V2
assim, substituindo na Eq. (4.87) temos que:
dp
L12
l12
=
=
dT
T V 2 T v2
(4.88)
onde no último passo passamos para quantidades intensivas, i.e., calor latente por molécula e volume por molécula.
Se a fase gasosa pode ser considerada como um gás ideal, podemos escrever:
pv2 = RT
v2 =
RT
p
CAPÍTULO 4. TERMODINÂMICA E SUAS APLICAÇÕES
160
Figura 4.11: Ilustração do diagrama de fases da água. As três fases estão localizadas em regiões delimitadas pelas curvas
de equilíbrio da mesma forma que no caso de duas fases. O ponto de intersecção das três curvas, denotado por t, é o
chamado ponto triplo da água onde os estados sólido, líquido e gasoso coexistem. Notamos ainda que a curva de equilíbrio
gás-líquido termina no ponto c onde temos um gás de alta densidade onde as fases líquida e gasosa são convertidas uma na
outra sem variação de entropia.
e substituindo na Eq. (4.88) segue que:
dp
l12
=p
.
dT
RT 2
(4.89)
A Eq. (4.89) é uma equação diferencial elementar pois é separável. Sendo assim, podemos resolvê-la diretamente para obter a pressão de vapor em termos da temperatura:
∫
dp l12
=
p
R
(
∫
l12
1
ln p =
−
R
T
dT
T2
)
+C
onde C é uma constante de integração. A equação acima pode ser reescrita na forma:
p = p0 e−l/RT
(4.90)
onde redefinimos a constante de integração em termos do fator multiplicativo p0 que pode ser interpretado como
uma pressão de referência para um dado valor de temperatura.
A Eq. (4.90) é o resultado final e nos indica que a pressão de vapor de um gás aumenta com a temperatura.
4.14. TRANSFORMAÇÕES DE FASE E A EQUAÇÃO DE ESTADO
4.14
161
Transformações de fase e a equação de estado
Agora que já consideramos as condições de estabilidade para uma dada fase, podemos analisar o caso geral de
uma transição de fase com base na equação de estado. Para isso, considere um sistema de apenas uma componente
cuja equação de estado
p = p(v, T )
(4.91)
é conhecida. Note que estamos considerando o volume molar v, por conveniência. A equação de estado dada pela
Eq. (4.91) pode ser representada em um diagrama p − v onde teremos várias curvas para diferentes valores de T ,
i.e., teremos diferentes isotermas. De modo geral, as curvas terão a forma de um S conforme ilustrado na Fig.
??. A curva T5 apresenta um ponto de inflexão chamado de ponto crítico abaixo do qual temos um região em que
é possível ocorrer a coexistência de duas fases (área sombreada definida pela linha pontilhada). Acima de T5 , as
curvas apresentam um decréscimo monotônico como a curva T6 . Neste caso, temos um único valor de volume
para um dado valor de pressão, característico da existência de apenas uma fase. Desta forma, a parte interessante
das transições de fase ocorre na região sombreada para temperaturas abaixo da temperatura crítica (T5 ). Na Fig.
4.12 temos uma isoterma representativa onde destacamos vários pontos importantes.
Se a pressão é suficientemente baixa, tal que p < p1 , então temos um valor único valor para cada pressão
e volume. Além disso, notamos que ∂p/∂v < 0, que é a condição de estabilidade da fase. Adicionalmente,
percebemos que o módulo |∂p/∂v| é muito pequeno à medida que nos deslocamos em direção ao ponto O. Como
resultado, a compressibilidade isotérmica é grande o que ocorre para gases. Concluímos então que para p < p1
temos uma fase gasosa estável. Isso é esperado desde a redução da pressão incorre no aumento de v, o que deve
resultar em um gás. Agora vamos considerar que a pressão é alta de maneira que p > p2 . Neste caso, temos ainda
uma inclinação negativa da curva de pressão em termos de temperatura mas agora |∂p/∂v| é grande. Neste caso,
temos novamente uma fase estável mas com baixa compressibilidade, o que implica que temos uma fase líquida
estável neste intervalo.
Vamos agora considerar o intervalo de pressões p1 < p < p2 . Aqui existem três valores de volume para um
dado valor de pressão. A questão é reduzida à determinar qual valor de volume corresponde à situação mais
estável. Para isso, podemos lançar mão da condição de estabilidade que usamos nos outros intervalos. Sendo
assim, notamos que os valores de volume situados no intervalo v1 < v < v2 implicam em ∂p/∂v > 0, ou seja,
não rendem um estado estável e podem ser excluídos. Os dois pontos restantes, fora do intervalo v1 < v < v2 ,
estão situados em regiões onde a inclinação da curva é negativa e, portanto, são pontos correspondentes à fases
estáveis. Resta então, determinar qual destes pontos tem uma estabilidade maior e sob quais condições. Na Fig.
4.12, escolhemos um valor particular da pressão, denotado por pA , e queremos descobrir se o valor mais estável
CAPÍTULO 4. TERMODINÂMICA E SUAS APLICAÇÕES
162
Figura 4.12: Diagrama esquemático mostrando as isotermas da substância. O ponto C é um ponto crítico. Para valores de
p e v dentro da região sombreada é possível existir duas fases ao mesmo tempo.
é v = vA ou v = vB Para isso, vamos comparar as magnitudes das energias livres de Gibbs gA (T, p) e gB (T, p)
— note que estas energias são energias per mole. Sabemos que a situação mais estável se reflete em um valor
menor da energia livre. Para determinar os valores de gA (T, p) e gB (T, p), lembramos que g(T, p) = ϵ − T s + pv.
Considerando que a temperatura é constante sobre a isoterma, segue que:
T ds = dϵ + pdv
e assim,
dg = d(ϵ − T s + pv) = pdv.
A relação acima permite determinar a variação da energia livre entre um ponto qualquer e um outro ponto
padrão O, assim, temos que:
g − gO =
∫
p
v dp
pO
e vemos que a variação da energia livre é igual à area compreendida entre a curva da pressão e o eixo p. Como
resultado, se fazemos a integração ao longo da curva, começando do ponto O, vemos que a energia lire irá aumentar
4.14. TRANSFORMAÇÕES DE FASE E A EQUAÇÃO DE ESTADO
163
até o ponto N , diminui do ponto N até o ponto J e volta a crescer partindo do ponto J ao ponto R. Com efeito, a
integral na região entre N e J é negativa o que contribui para a redução da energia livre. Considerando a variação
de g com p, podemos visualizar a variação de g usando o diagrama da Fig. 4.13.
Figura 4.13: Gráfico da equação de estado (Eq. (4.91)).
Com o auxílio da Fig. 4.13, podemos resumir o que ocorre para o intervalo completo das pressões. No ponto O,
temos apenas a fase de alta compressibilidade (gás); a medida que a pressão é aumentada até o intervalo p1 < p <
p2 , existem três valores possíveis para a energia livre. Os valores de g ao longo da curva OKXN correspondem
aos valores da fase de alta compressibilidade; os valores de g ao longo da curva JXM R correspondem à fase de
baixa compressibilidade e finalmente os valores de g na curva JDN são aqueles valores para o intervalo instável.
Com estas informações, vemos que a medida que p aumenta a partir de p1 (correspondendo ao ponto K), a fase
gasosa apresenta o menor valor da energia livre e, portanto, é a mais estável. Esta situação permanece a mesma até
que o sistema atinja a pressão pX onde as curvas OKXN e JXM R se cruzam. Neste ponto, temos a transição
podendo haver quantidades arbitrárias de ambas as fases coexistindo. Acima do ponto X, a fase mais estável é
a líquida desde que a curva JXM R apresenta um valor menor da energia livre. Portanto, no ponto X o sistema
muda de uma curva para outra e, assim, pX é a pressão de transformação.
Vamos considerar a transformação de fase em maiores detalhes. Seja pA = pX a pressão de transformação de
modo que ambos os pontos A e B na Fig. 4.12 correspondem ao ponto X da Fig. 4.13. Além disso, vB é o volume
molar do gas e vA é o volume molar do líquido a pressão e temperatura correspondentes à transição. Sob estas
circunstâncias, temos uma fração ξ de moles da substância na fase gasosa e 1 − ξ na fase líquida. O volume molar
vtot é então dado por:
vtot = ξvB + (1 − ξ)vA
CAPÍTULO 4. TERMODINÂMICA E SUAS APLICAÇÕES
164
A medida que a transformação de fase ocorre, o sistema muda continuamente de um volume vB da fase
gasosa para vA da fase líquida com ξ variando de 1 até 0. Neste processo, haverá calor latente associado e, por
conseqüência, uma mudança na entropia. A linha BDA, ao longo da qual a transformação ocorre, nos permite
escrever para qualquer ponto sobre ela:
gB = gA .
Esta igualdade pode ser escrita em termos da integração sobre a curva BN DJA, i.e.,
gB − gA =
∫
∫
∴
v dp = 0
BN DJA
v dp = 0
BN DJA
ou seja,
∫
∫
N
B
∫
D
v dp +
N
∫
J
v dp +
A
v dp +
D
v dp = 0
J
e notamos que as integrais de N a D e de D até J são negativas, assim, podemos escrever
∫
N
B
v dp −
∫
N
D
( ∫
v dp + −
∫
D
A
v dp +
J
)
v dp = 0
J
ou que nos permite escrever
area(DN B) − area(AJD) = 0
onde a área DN B é aquela delimitada pela curva DB e a curva DN B; a área AJD é a área delimitada pela reta
AD e a curva AJD.
Vemos então que a localização da linha de transformação de fase ADB é determinada pela condição:
area(DN B) = area(AJD).
A medida que a temperatura aumenta, os pontos de extremo onde (∂p/∂v)T = 0 ficam cada vez mais próximos.
Isto equivale a dizer que a mudança de volume ∆v na transformação de fase diminui. Quando a temperatura é
elevada ainda mais chegamos a situação em que os dois pontos de extremo coincidem de maneira que não existe
mais a mudança de sinal da derivada. Neste ponto temos que (∂ 2 p/∂v 2 )T = (∂p/∂v)T = 0, i.e., temos um ponto
de inflexão na curva pv. Este ponto é o chamado ponto crítico e os valores correspondentes T , p e v são as
chamadas temperatura, pressão e volume críticos. Acima desta temperatura não existe mais transição de fase e
a curva apresenta (∂p/∂v)T < 0 para todos os pontos caracterizando a existência de uma única fase estável para
todos os valores de pressão e volume.