1w
j1111111wM
:
Propulsive Performance of Flexible-Chord Foils
by
Mercedes E. Castelo
Submitted to the Department of Mechanical Engineering in Partial
Fulfillment of the Requirements for the
Degree of
Bachelor of Science
At the Massachusetts Institute of Technology
June 2002
©2002 Massachusetts Institute of Technology. All rights reserved.
Signature of Author.. ...
Depqytment of Mechanical Engineering
Certified by..........
U/^-, ,
Michael S. Triantafyllou
Professor of Ocean Engineering
Thesis Supervisor
Accepted by...........................................................................
Ernestj(Cravalho
Chairman of the Undergraduate Thesis Committee
MASSA CHISET-S INSTITUTE
OF TECHNOLOGY
AW
1
JUN 17 2003
LIBRARIES
P-11MOM
.... ..
Propulsive Performance of Flexible-Chord Foils
by
Mercedes E. Castelo
Submitted to the Department of Mechanical Engineering
on May 10, 2002 in partial fulfillment of the
requirements for the degree of Bachelor of Science in
Mechanical Engineering.
Abstract
This thesis details the experiments conducted with two flexible-chord foils to compare
their propulsive performance when moving in heave and pitch with that of a stiff foil.
The two flexible foils were designed and fabricated with an aluminum base and urethane
molded around this base to form the external foil shape. The most flexible of the two
foils performed the best. In certain experiments it displayed up to 20% higher efficiency
than the stiff foil and displayed about the same values of thrust. Flexible foils should be
investigated for potentially even better efficiency results.
Thesis Supervisor: Michael Triantafyllou
Title: Professor of Ocean Engineering
2
00, ft-1
Table of Contents
1.0 Introduction.................................................................................................................05
1.1 Previous Flexible Foil W ork...................................................................................
05
1.2 Related Stiff Foil Work..........................................................................................
06
2.0 M aterials, Apparatus, and Procedures.....................................................................
07
2.1 Foil Design ..................................................................................................................
07
2.2 M olding Procedure...................................................................................................09
2.3 Experim ental Apparatus..........................................................................................
11
2.4 Foil M otion...........................................................................................................13
2.5 Experim ental Procedure..........................................................................................
14
3.0 Results.......................................................................................................................15
4.0 Discussion..................................................................................................................24
5.0 Conclusions and Recom mendations.......................................................................
25
Bibliography .....................................................................................................................
26
3
List of Figures
1 Efficiencies for a flexible foil, a stiff foil and a screw propeller...........................06
2 Aluminum Plate-Parametric View............................................................................08
3 Aluminum Plate-Close-up View...............................................................................09
4 Cross-sectional View of Flexible Foil......................................................................10
5 Shore A 60 and 80 Elasticity Comparison..............................................................11
6 Front View of the C arriage.....................................................................................12
7 A ngle of A ttack ....................................................................................................
13
8 Stiff Foil Thrust and Efficiency..............................................................................16
9 Shore 80 A Foil Thrust and Efficiency...................................................................17
10 Shore 60A Foil Thrust and Efficiency...................................................................18
11 Position and Force Data for the Shore A 60 and Stiff Foil......................................19
12 Power Data for the Shore A 60 and Stiff Foil...........................20
13 Efficiency Comparison for the three foils at a St of 0.1......
..............
22
14 Efficiency Comparison for the three foils at a St of 0.2......
..............
22
15 Efficiency Comparison for the three foils at a St of 0.3......
..............
23
16 Efficiency Comparison for the three foils at a St of 0.4......
..............
23
4
I
1.0
Introduction
In the development of ship propulsion, fish fins have been considered as alternate means
for efficient locomotion. Through the evolutionary process, fish fins have been evolving
and becoming better through time. Many characteristics of the fish fin facilitate better
performance in water; the shape of the fin affects the fish's speed and the flexibility may
be responsible for better efficiency while swimming. The following thesis details the test
of three oscillating foils with different chord flexibility. Each foil was tested at different
Strouhal numbers and angles of attack to coincide with the previous tests of a stiff foil
conducted by Douglas Read [1].
1.1
Previous Flexible Foil Work
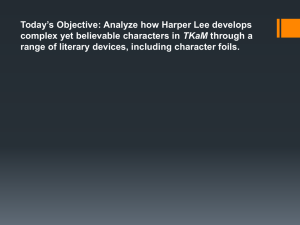
Previous work has been conducted on flexible foils and has revealed improvements in
efficiency compared to the stiff foil. According to Yamaguchi [2], flapping foils with
flexible chords are more efficient than stiff foils and even perform better than screw
propellers. Yamaguchi designed a flexible foil for a small boat and ran the boat at the
same operating conditions for a stiff foil. He found that the flexible foil gave better
efficiencies as seen in Figure 1.
5
Elastic Foil(n
j.75.
=1.00)
U
0 70_
44.
Original Screw Propeller(nh i.
4
826
0 0.60-
---
0
no sea margin
15%
sea margin
0.50
q.0
'
10.0 11.0 12.0
Vs
13.0
'
14.0 15.0
16.0
(kt)
Figure 1. Above is a comparison of efficiencies for a flexible foil, a stiff foil and a
MAU-55 screw propeller. [2]
The middle line in the graph shows the efficiency of a screw propeller for the same boat
and load. Both screw propeller and stiff foil fall repeatedly under the performance of the
compliant foil, for this particular case considered
1.2
Related Stiff Foil Work
An analysis of an oscillating stiff foil has been done at the MIT Tow Tank by Douglas
Read [1]. Read's thesis investigated the efficiencies and thrust coefficients at various
Strouhal numbers and angles of attack. The angle of attack is defined as the angle that
the foil makes compared to the instantaneous flow direction(accounting for heave motion
as well as forward motion), as described further in section 2.4 and in Read. Read found
that at Strouhal numbers of 0.35 - 0.44 there were peak efficiency areas for an angle of
attack between 15' and 250 with a thrust coefficient around 0.7 and high efficiencies
6
around 0.5. The objective of this thesis is to compare the efficiency and the thrust of
Doug Read's stiff foil to the flexible foils designed for the following experiments.
2.0
Materials, Apparatus, and Procedures
Two foils, each with a different chord flexibility, were designed to experiment against the
foil Douglas Read used for his thesis. The two foils used in the experiments were
replicas of Read's NACA 0012 stiff foil with 10 cm chord and 60 cm span. Since the
foils needed to be flexible along the chord but not along the span, a new design for the
foil was developed.
2.1
Foil Design
An aluminum 0.25 inch thick piece of aluminum was machined into the shape shown in
Figure 2 below. The aluminum piece is curved at all edges in order to keep the rubber
from tearing off. The holes along the middle of the aluminum plate helped keep the
rubber held tightly along the plate.
7
1.5 inches
23.5 inches
Dowel Pins
Figure 2. The aluminum plate is shown above with holes cut along the center. This
plate was used to hold the rubber mold in place.
The shafts are attached to the aluminum piece with dowel pins that keep them from
rotating. The dowel pin holes, which are 1 inch from the ends of the aluminum piece, are
shown in the above figure. The two stainless steel shafts shown in the figure fit inside the
aluminum plate. The ends of the steel shafts fit into the gears and bearings on the
experimental carriage, described later.
8
~.4OO
3.65"
Figure 3. Dimensions for the various parts are given in the above illustration; all
dimensions are in inches. The holes along the center are 0.4 inches in diameter.
The dowel pin holes are approximately 0.063 inches in diameter; the holes at the
end of the Aluminum plate are 0.192 inches in diameter. The first two inches of
shaft 1 are 0.189 inches in diameter and 0.25 inches in diameter for the rest of the
shaft.
The shafts were made from stainless steel in order to avoid corrosion as these shafts
would be submerged in water, while the aluminum piece would be protected by the
surrounding flexible urethane.
2.2
Molding Procedure
Once the aluminum plate and shafts were designed, a plastic box was made to hold the
aluminum tightly. In order to make the mold, Read's stiff foil was placed inside the box.
Vacuumed RTV was then poured over the stiff foil that was held inside the box and
allowed to cure. This RTV mold of the stiff foil provided a means of making flexible
foils with the exact proportions of the original.
9
In order to make the molded foils, the plastic box with the RTV mold needed to be sealed
with clear cement and allowed to dry over night in order to prevent leakage of the
urethane compound. The procedure for molding the flexible foils consisted of preparing
only a third of the molding compound, pouring it in, and repeating this until the entire
molding box was full and the aluminum piece inside was covered. This procedure
allowed enough time to pour the prepared urethane and for it to still adhere to the next
poured amount of urethane that was prepared resulting in foils with smooth surfaces.
Preparing the entire amount of urethane did not give sufficient time for the fluid to reach
the bottom of the box before it turned to solid and resulted in foils that had deformations.
Below in Figure 4 is a cross-sectional drawing of the foil with the aluminum piece inside.
Shaft
numFlexible
Are
Figure 4. Sketch of the foil structure. The circle shown in the middle is the steel shaft
and the area in between the shaft and the flexible area is the aluminum plate.
Flexible Urethane surrounds the Aluminum plate.
Two different stiffnesses were chosen to compare with the original stiff foil. Shore A 60
flexible urethane, a compound with a 'floppy' consistency and Shore A 80 flexible
urethane, a compound with a compliance between that of Shore A 60 and the stiff foil,
were chosen. These were all liquid urethane casting compounds from Forsh Polymer
Corp. Figure 5 below shows the percent of elongation plotted against the force applied
for the different materials. For forces within the range of interest in this study, the Shore
60 material is approximately four times as compliant as the Shore A 80 material.
10
Material Properties for Shore A 60 and 80
2000
Ultimate Tensile Strength
1800
-
1600
--
X9
1400-
Shore A 80
0
----
1200 -
'9------
F,
0
1000 --
U
800-
/
600400
--
-
.,,
---
Shore A 60
200--
owl
0
0
50
100
150
200
250
300
350
400
450
500
Force (Psi)
Figure 5. Stiffness comparison for the two flexible urethane materials, Shore A 60
and 80 hardness. The Shore A 80 hardness needs about four times the force in
order to elongate the material the same amount.
2.3
Experimental Apparatus
The tests for the foils were conducted at the MIT Towing Tank. The tank is 30 m in
length and 2.6 m in width. The foils were mounted on the carriage shown in Figure 6.
11
-L
"MON"K16,
MUMM
-"-
Aw"WWAORWANOW-,
Mc~in Ccarric-geIVD
Lower Carriace
Pitch Servornotor
Torque Sensor
-
-
reo Snsor
Fnside
Assembly
Potentiometer
Chain Drive Inside Strut
N
NACA 0012 FoR
Figure 6. View of the Carriage. [1].
The entire carriage moved along the length of the tank at the speed of 0.4 m/s. A foil was
placed at the bottom of the carriage and fastened inside the bearings on either side.
Endplates were located at the ends of the foil to reduce 3-D effects. A KISTLER 9117
X-Y-Z piezo-electric force sensor was at one end of the carriage to sense forces in the x
and y direction. At the other end was a gear that was rotated via a chain attached to the
motor located above the water line. A potentiometer was attached to the motor shaft to
sense the pitch angle and a torque sensor, a KISTLER model 9065, measured the applied
torque. A computer controlled the vertical motion at various frequencies and the
horizontal motion along the tank while also simultaneously pitching the NACA 0012 foil.
12
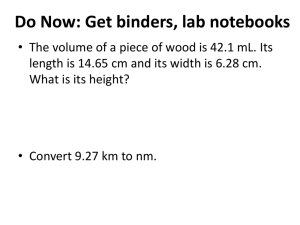
2.4
Foil Motion
The motion of the foil heave is described in Equation 3.1 below.
h(t) = ho sin(wt)
(3.1)
where h is the heave motion as a function of time, ho is the heave amplitude, o is the
frequency in rad/sec. In addition to the motion due to the heave, the foil also experiences
a pitch motion. This pitch motion is shown in Equation 3.2 below.
0(t) = 0. sin(ot + ig)
(3.2)
where 0 is the pitch motion as a function of time, 0 is the pitch amplitude in radians and
W is the phase angle between pitch and heave in radians. The experiments in this thesis
were all conducted with a phase angle, W, of 90' and an h/chord equal to 0.75.
I dhldt
U
(t)b
h(t)
Figure 7. Angle of attack, a, for a heaving and pitching foil is shown above. [1]
In Figure 7 above, the various angles formed by the pitch and heave are illustrated. The
equation for the instantaneous angle of attack is given below:
a(t) = {arctan (ho o cos(ot) / U)- 0, sin ((ot + x)}
13
(3.3)
where a(t) is the angle of attack, U is the free-stream velocity. The angle of attack is
derived more fully in Read [1]. The Strouhal number is defined as,
St = o ho / n U
(3.4)
The Reynold's number for the experiments was approximately 40,000. The Reynold's
number is defined below:
Re = U*chord/v
(3.5)
where v is the kinematic viscosity of water in m2/s.
2.5
Experimental Procedure
The calibration procedure used for the experiments was the same as outlined in Read [1].
For the calibration of the forces in the x-direction, the foil was tilted at 900; a weight of
0.5 kg was hung from the shaft closest to the Kistler. For the calibration of the forces in
the y-direction, the foil was placed in its normal position; the weight was hung around the
center of the foil with the weight falling from the trailing edge to calibrate for both the
torque and y-force. DASY Lab recorded the forces from the Kistler sensors.
The pitch was then zeroed by running the foil in the tank and minimizing the lift forces.
Next, the tests were run for a range of angles of attack and Strouhal numbers. The data
was corrected for the natural drift within the Kistler sensors.
With the given experimental set up, the lift, thrust, torque, pitch position, and heave
position were recorded. Propulsive efficiency and the thrust coefficient were used to
compare the performance of the three foils. The thrust coefficient is described below:
CT =
T/ (1/2 p U2 *chord*span)
14
(3.6)
Where CT is the thrust coefficient, T is the mean measured force, p is the density of
water, U is the towing speed of 0.4m/s, chord is the length of the chord, 0. lm, and span is
the length of the span, 0.6 m. Another important term in comparing the foils was the
propulsive efficiency. It compares the power into the system with the power produced by
the foil,
T
where j is the propulsive efficiency,
TU/ (yFy
+
OT)
(3.7)
y is the heave velocity, Fy is the force in the y
direction, 0 is the pitch angular velocity and r is the torque. Experiments were taken for
the following range of Strouhal numbers: 0.1, 0.2, 0.3, and 0.4 and for a range of the
following maximum angles of attack: 10, 150, 200, 25', and 300. Each experiment was
conducted twice to see if the results were repeatable
3.0
Results
The following are the results from the experiments run at the Tow Tank. Figures 8, 9,
and 10 show the results for the Stiff Foil, Shore A 80 Foil and Shore A 60 Foil
respectively.
In Figure 8, the efficiency and thrust coefficient for the Stiff foil are shown. The thrust
coefficient increases as the Strouhal number increases at each angle of attack. The
efficiency reaches a peak at around 10' - 15* and decreases after that. The data at a
Strouhal of 0.1 seems to trail the others significantly. These same observations are true
for Figures 9 and 10. The efficiencies for all foils display a peak between 10* and 15'.
The efficiencies all tend to decrease as the angle of attack increases past that peak.
15
Thrust for Stiff Foil
1.2
St. = .4
0.8-
0.6(0
-c
I-
-- -
St. =.3
-+
St. =.2
0.4-
0.2
St. =
-0.2
5
15
10
:1
35
30
25
20
Angle of Attack
Figure 8(a) Thrust for Stiff Foil
Efficiency for Stiff Foil
0.6
0.4
----
---
-
..
....
S t
.4
"St. = .2
4)
0
EE
0
W
0)
-0.2
C2
CL
-0.4
St. = .1
5
10
20
15
25
30
35
Angle of Attack
Figure 8(b) Efficiency for Stiff Foil
Figure 8. Figure 8(a) above illustrates the thrust coefficients and Figure 8(b) shows
the efficiencies for the Stiff foil.
16
Thrust for Shore A 80 Flexible Foil
1.21
St.=.4
...
..-.....
..
0.8-
0.61-
St
---
=.3
0.4
0.2 -
------ -St =2
0
St
-0.2
5
10
15
20
25
= .1
30
35
Angle of Attack
Figure 9(a) Thrust for Shore A 80 Foil
Efficiency for Shore A 80 Flexible Fail
0.4
St
0.2 -
.3
St = .2
0
0
-0.2F
,0
0L
-04 -
St. = .1
-0.65
10
20
15
25
30
35
Angle of Attack
Figure 9(b) Efficiency for Shore A 80 Foil
Figure 9. Figure 9(a) above illustrates the thrust coefficients and Figure 9(b) shows
the efficiencies for Flexible Shore A 80 Foil
17
Thrust for Shore A 60 Foil
1.2
I
IIII
St
I
=
.4
0.8-
0.6-
St. =.3
2,
---x
---- - --------
iE
0.4-
~
--
St
-
.2
0.2
0
St.
-0.2 L
5
10
20
15
=.1
35
30
25
Angle of Attack
Figure 10(a) Thrust for Shore A 60 Foil
Efficiency for Shore A 60 Foil
I
L.8
<...
. St
0.4
- .4
-St. .3
S0.2-
St
= .2
p000
-0.2-
-0.4
St. = .1
-
-0.6-5
10
15
20
25
30
35
Angle of Attack
Figure 10(b) Efficiency for Shore A 60 Foil
Figure 10. Figure 10(a) above illustrates the thrust coefficients and Figure 10(b)
shows the efficiencies for the Shore A 60 Foil.
18
L ift
10
z
-$02
5
0
25
Thrust
30
35
Pitch Position
30
35
0
-0
-0
25
Heave Position
30
35
25
Torque
30
35
0.1
-
0.2
2
26
36
38
...-------z S 00 -----
00
0
222
-----24
24
26
28icToqe30
Poi30
28
30
32
34
36
38
Figure 11(b). Graphs for the Stiff Foil at St = 4 and Angle =200
Figure 11. Graphs for the Lift, Thrust, Pitch Position, Heave Position, and Torque as
a function of time recorded from DASY Lab at St
19
=
.4 and Angle
= 200
Power vs. Time for Shore A 60 Flexible Foil
U
7
6
5
4
-
-'-ii
3
2
1
0
I
-
24
2
28
26
30
32
Time (s)
Figure 12(a). Shore A 60 Flexible Foil Power
Power vs. Time for the Stiff Foil
8
7
6
5
4
3
02
2
-
-
1
0
.1
2
24
26 Time (s) 28
30
32
Figure 12(b). Stiff Foil Power
Figure 12. The Solid Line shows the power from the heave velocity multiplied by the
Lift. The dotted line is from the power from the pitch angular velocity multiplied by
the Torque. Figure 13(a) illustrates the power for the Shore A 60 Foil and Figure
13(a) shows the power from the Stiff Foil.
20
MENG=
-
I
In Figures 11(a) and 11(b), the position and force data are shown for experiments at a
Strouhal number of 0.4 and an angle of attack of 20'. Figure 11(a) shows the
experimental results for the Shore A 60 Flexible foil and Figure 11(b) shows the results
for the stiff foil. The lift data for both have a different form. In figure 11(a) the lift seems
to flatten at the top below 10 N while in figure 11(b), the lift spikes at the peak of 20N.
The lift data for both figures is asymmetric. The dotted lines in Figures 12(a) and 12(b)
show the power from the torque multiplied by the angular velocity. The solid lines show
the contribution from the heave velocity multiplied by the lift force. The solid lines
contribute significantly less power compared to the solid lines. The peak power ranges
between 3.5 W and 5.75 W for the flexible foil and between 5 W and 7 W for the stiff
foil.
The following figures 13 - 16 compare the efficiency for the three foils at different
Strouhal numbers. In each of the graphs, the flexible foil performs better than the Shore
A 80 foil and the stiff foil. The Shore A 80 foil closely resembles the performance of the
stiff foil. In figures 14, 15, and 16 at the angles of 10 and 15', the efficiency for the
Shore A 60 flexible foil is approximately 20% higher than the stiff foil. Comparing the
results to the data Read collected, the stiff foil did not show the same performances for
efficiency and thrust. The flexible Shore A 60 foil performed better than both the data
collected by Read and by this thesis for the stiff foil.
The vertical lines in the figures display the amount of error in the experiment. This error
is the standard deviation from the data collected. There seems to be a large amount of
error at the smallest angle of attack of 100. This may be due to the smaller forces present
at this angle. The error would have a greater effect at smaller loads than at higher loads.
21
E fficiencies for St rouhal
=
0.1
0.8
0.6
-
0.4
-
0.2
-
Shore A 60 Foil
boCe A_804
tif Foil
>
LU
0
-0.4
-0.6
10
15
25
20
Angle of Att ack
30
Figure 13. Efficiency at a Strouhal of 0.1 for all three foils.
E fflden cies for Strouhal
=
0.2
0.90.8 F
-hore
A 60 Foil
0.7
C
w)
0.6
hore A 80 FOJ
0.5 -
Stiff Foil'\
0.4
0.3 0.2 -
0.1
-
10
15
20
Angl e of Attack
25
Figure 14. Efficiency at a Strouhal of 0.2 for all three foils.
22
30
Efficiencies for Strouhal
=
0.3
0.8
0.75 } -S'hore A 60Foil
0.7 0.65
0.6 0
0)
N
0.55 Shore A 80 Foil
--
'
0 45
0.4 0.35 0.3
10
20
Angle of Attack
15
25
30
Figure 15. Efficiency at a Strouhal of 0.3 for all three foils.
E fi ciencies for Strouha
=
0.4
0.7
J-lhore A 6
Foil
0.65
0.6
0.55
0
C
Au
0
/
0.5
~
~~
Stiff Foil
o~86
Foi
r
-..
wU 0.45
0.4
0.35
0.3
0.25
10
15
20
Angle of Attack
25
Figure 16. Efficiency at a Strouhal of 0.4 for all three foils.
23
30
4.0
Discussion
The three foils displayed similar results for their thrust coefficients. From the Figures 810, the graphs display the same basic trends in the efficiencies as well. The difference in
the lift in Figures 11 and 12 may explain why the flexible foil performs so much better
than the stiff foil. The Lift for the Shore A 60 flexible foil does not reach high peaks like
the stiff foil. The Shore A 60 seems to flatten out at less than 10 N while the Stiff foil
reaches up to 20 N.
The data may have been affected by several sources of error. The Shore A 80 foil results
may have been adversely affected by the deformations on its surface. From molding the
foil improperly, the surface had a seam line that could have affected its performance.
Instead of performing the same and at some points below the stiff foil, it may have
performed better than the stiff foil had those deformations not been there.
In the Shore A 60 foil, one of the shafts could be slightly rotated with a set of pliers. This
would not adversely affect the results because the actual pitch position and torque, which
give the power input to the foil, are measured at the chain drive at the end of the motor
shaft, 'upstream' from the actual foil. In addition, the torques in this experiment would
not be able to turn the shaft.
The block at the Kistler end of the foil could be moved a bit due to a broken screw;
moving this end caused the Kistler to record false data. Once this was observed, a 'C'
clamp was used to keep that end fixed. This stopped the Kistler from recording the
movements of the carriage.
24
5.0
Conclusions and Recommendations
The results are promising in that the most flexible Shore A 60 foil performed better than
the stiff and the Shore A 80 foil. Flexible foils should be further investigated because of
their potential to increase efficiency. Another Shore A 60 foil should be made or the
current one fixed to keep the shaft from rotating to compare with the results shown in this
thesis. Foils with even more compliance than the Shore A 60 foil designed in this thesis
should be developed and tested for their performance. An easier to use system for the
carriage should also be developed. The current system did not allow for the easy
switching of foils. Once the foil was switched, the system needed to be recalibrated and
zeroed again.
25
Bibliography
1. Read, Douglas "Oscillating Foils for Propulsion and Maneuvering of Ships and
Underwater Vehicles" MIT Masters Thesis. February 2000
2. Yamaguchi, H. "Oscillating Foils for Marine Propulsion" Proceedings of the Fourth
International Offshore and Polar Engineering Conference (1994): p539-544
26