Control of Motion - School of Applied Physiology
advertisement

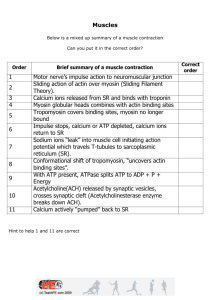
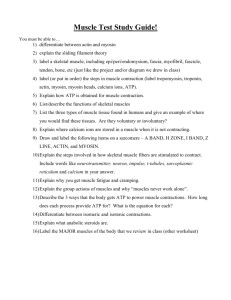
Neuromuscular integration Tom Burkholder thomas.burkholder@ap.gatech.edu 4-1029 Weber 123 http://www.ap.gatech.edu/burkholder/8813/ Learning goals • Technical – – – – Frog anatomy Muscle mechanics Force transducer Feedback control • Conceptual – Muscle physiology – Proprioceptors – Sensorimotor integration Develop a closed loop hybrid system to investigate some aspect of neuromuscular control. Ideally, the structure or parameters of the computational system will test a model of biological control References • • • • • • • Gasser HS and Hill AV. The dynamics of muscular contraction. Proc R Soc Lond (B) 96: 398-437, 1924. Rack PM and Westbury DR. The effects of length and stimulus rate on tension in the isometric cat soleus muscle. J Physiol (Lond) 204: 443-460, 1969. Nichols TR and Houk JC. Improvement in linearity and regulation of stiffness that results from actions of stretch reflex. J Neurophysiol 39: 119-142, 1976. McCrea DA. Spinal circuitry of sensorimotor control of locomotion. J Physiol 533: 41-50, 2001. Lutz GJ and Rome LC. Built for jumping: the design of the frog muscular system. Science 263: 370-372, 1994. Rome LC, Swank D, and Corda D. How fish power swimming. Science 261: 340-343, 1993. Chizeck HJ, Crago PE, and Kofman LS. Robust closed-loop control of isometric muscle force using pulsewidth modulation. IEEE Trans Biomed Eng 35: 510-517, 1988. Control of Motion • • • • Phylogenic background Motor proteins Muscle properties Control systems Protista motility • RNA Polymerase • Mitosis • Swimming – Flagella – Cilia • Crawling – Rolling – Pseudopod formation • Chemotactic • Receptor mediated activation of myosin Nematodes • Large scale swimming – Cyclical – Force/motion phase Muscle activation • Specialized organs – Sensors – Motors – Wiring • Complex behavior – Avoidance Muscle activation Insect Flight • Indirect flight muscles • Activated less than once per cycle • Molecular kinetics • Springlike, but positive work • Stretch activation Active force 1 100 0 DL (mm) Force (mN) A 3 5 Passive force 100 kN m -2 500 0 0.2 0 5% Stimulation 0 100 200 300 Time (ms) 400 Applied length 50 ms Mammalian locomotion • Multiple limbs • Ballistic Muscular work during gait • Positive work • Passive elastic mechanisms Daley, M. A. et al. J Exp Biol 2003;206:2941-2958 Terrestrial posture • Support body against gravity • Perturbation control – External (wind) – Internal (respiration, muscle) • Small movements Motor proteins • Kinesin, dynein, myosin • Globular head – Filament binding & ATPase • Cargo-carrying tail Kinesin Myosin Myofilament structure • Myosin polymers arrange motor domains to maximize interaction with actin filament 200 nm Structural homogeneity • Structural order yield functional consistency – Narrow range of sarcomere “strength” – Minimizes intra-muscular force loss Sliding filament theory • Force varies in proportion to crossbridge binding Z I A I Crossbridge cycle • ATP driven, ratchet motion • Mechanochemical coupling by crossbridge elasticity Crossbridge Cycle Hydrolysis of ATP energizes myosin; moves crossbridge ATP binding to myosin displaces actin Energized myosin binds actin Myosin binds actin strongly (rigor) Release of inorganic phosphate triggers power stroke Fundamental reactions • Actin-myosin association – Slow (20 ms) – All or none change in force • Power stroke – Fast (1 ms) – Modulatory A rapid shortening pushes crossbridges through the power stroke. These crossbridges rapidly accommodate the change and are slowly displaced by new crossbridges Isotonic shortening • Muscle can shorten against less load than it can hold. • Stimulate muscle • Allow force to stabilize Magnetic catch • Release against constant load Counterweight Muscle Dynamic response of muscle • Isotonic force velocity relation • Stretch and hold response Vmax v P P0 P0 Vmax v a 1.8 1.6 1.4 100 00 Force Force response 500 0 0.2 0 (mm) L D 0 1.2 Po 1.0 0.8 0.6 Force (mN) 0.4 100 200 300 Time (ms) 400 Applied length 0.2 0.0 -0.5 0 0.5 Shortening Velocity Vmax 1 Engineering analog • “Force-length” is like stiffness • “Force-velocity” is like viscosity F=kx Force F=Fo-bv 1.8 1.6 1.4 1.2 1.0 0.8 0.6 0.4 0.2 0.0-0.5 Po 0 0.5 Shortening Velocity Vmax 1 Phenomenological (Hill) Model • Linear model – Force-length spring constant – Force-velocity viscosity • Standard linear solid analogy – Contractile Force-length – Contractile Force-velocity – Elastic elements account for dynamics Control of activation • Troponin/tropomyosin complex – Bind actin – Block myosin – Calcium dependent Calcium control • Contractile dynamics are calcium dependent • Efficient contraction requires homogeneous calcium transients • Sarcoplasmic reticulum • T-Tubules Excitation contraction coupling • • • • • Synaptic discharge initiates action potential V-gated Ca2+ channels open Ca2+ bind TnC Force generation Action potential Recovery Calcium Force Force summation • Nonlinear addition of subsequent APs Force Frequency • Muscle & species dependent • Myosin kinetics • Calcium kinetics Whole muscle organization • Physical – – – – Fiber Fascicle Muscle Agonist • Neural – – – – Motor unit Compartment Muscle Synergy Motor Unit • Alpha motorneuron – Large (12-20 um) – High CV (70-120 m/s) MN • Innervated muscle fibers – 10-1000 fibers/neuron – Generally proportional to axon size – Generally of similar function • 5-1000s per muscle Innervated fibers Whole muscle force modulation • Rate – Force-frequency – Continuous control • Recruitment – – – – Select subpopulation of MU Force sharing Metabolic optimization Size principle Motor unit control • Smooth force generation – Individual MUs subtetanic – Rate & phase variation Electrical stimulation • Recruitment – Axonal input resistance – Capacitance • Synchrony • Recruitment modulation – Intensity – Pulse width – High frequency block