control applied to actuator and driver of the implantable
advertisement

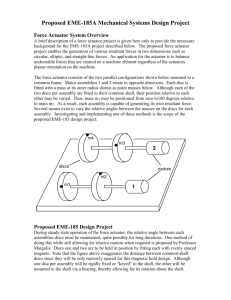
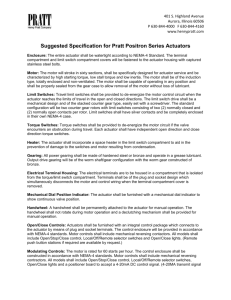
CONTROL APPLIED TO ACTUATOR AND DRIVER OF THE IMPLANTABLE CENTRIFUGAL BLOOD PUMP: MODEL AND VALIDATION Tarcísio Leão1, Eduardo Bock1,2, Alexandre Campo1, Ivan Chabu3, Aron Andrade2, Beatriz Uebelhart2, André Cavalheiro3, Diolino Santos-Filho3, José Cardoso3. Federal Institute of Technology in Sao Paulo – IFSP, Sao Paulo (SP), Brazil 2 Institute Dante Pazzanese of Cardiology - IDPC, Sao Paulo (SP), Brazil 3 Escola Politecnica of Sao Paulo University - EPUSP, Sao Paulo (SP), Brazil E-mail: eduardo_bock@yahoo.com.br 1 Abstract. A computational model was created to represent dynamics and control applied to actuator and driver of the Implantable Centrifugal Blood Pump (ICBP). This work is part of ICBP multi-institutional project of a Ventricular Assist Device (VAD) for long term application. A reliable model is an important tool to set up parameters of ICBP controller. The actuator of ICBP is a Brushless Direct Current motor (BLDC) coupled to the pump impeller by permanent magnets. Computational model was based on state space modeling with Permanent Magnet Synchronous Machine (PMSM) SimPowerSystems library (Simulink, MATLAB 2010, Mathworks). The BLDC was modeled using blocks of power. Simulations were performed varying motor speed to evaluate torque. Validation was obtained with a device designed to measure speed, current, voltage, electromagnetic torque and axial force. Differences observed between simulation results and experimental data were less than 10%. The proposed model was considered satisfactory to represent dynamics in the actuator. With a reliable model, further improvements can now be simulated before its implementation in electronic controller. Keywords: Implantable centrifugal blood pump, State space computational modeling, BLDC motor. 1. INTRODUCTION A novel Implantable Centrifugal Blood Pump has been developed for long term circulatory assistance with a unique impeller design concept. This feature was called dual impeller because it allies a spiral-shaped cone with vanes to improve blood flow characteristics around the top inflow area to avoid blood clot due to stagnant flow (BOCK, 2011). This work is part of ICBP multi-institutional project of a Ventricular Assist Device (VAD) for long term application. This device is composed of: continuous flow centrifugal blood pump, BLDC electric motor, controller to drive the motor and battery system. Centrifugal pumps represent the majority of research currently developed, which allows operation at lower motor speeds (approximately 2,000 rpm) than the continuous flow axial pumps; obtain lower rates of hemolysis, i.e., less damage to blood elements, have anatomically compatible dimensions and reach the estimated life together in support of 2 years. The brushless motors, BLDC, have been the main component of propulsion in the development of most of the VAD. Among the characteristics that make use in implantable pumps, there is the absence of brushes, which avoid wear observed in other electrical motors, and intolerable in implantable systems. The operation at high rotational speeds and small size are also factors that support this use (BOCK, 2008). The three-phase brushless electric motor has a synchronous permanent magnet on the rotor and coils on the stator located, usually star connected with inverter control for bridge-type H (FONSECA, 2008). The operation of a BLDC is accomplished through strategic switching of the coils. The switching is performed by a circuit that supplies current to the motor coils as a function of rotor position. The phase current of a BLDC, usually rectangular, is synchronized with the Back Electromotive Force (BEMF) to produce maximum torque and constant speed, with the trapezoidal BEMF, which is the main characteristic of control (SHAO, 2003). The actuator built for the ICBP is a BLDC motor axial magnetic flux. The stator is enclosed in housing for its attachment to the bottom of ICBP. The motor rotor is integrated with pump rotor, forming a single assembly. Figure 1 shows the motor and ICBP. The stator core is slotless type. Hall sensors are located in the stator to inform the rotor position. Figure 2 shows the actuator of ICBP. Figure 1. Drawings of pump assembly, actuator and stator windings. Hall Sensor Figure 2. Pictures of ICBP actuator showing stator windings and Hall sensors. A computational model was created to represent dynamics and control applied to actuator and driver of the Implantable Centrifugal Blood Pump (ICBP). A reliable model is an important tool to set up parameters of ICBP controller. The Matlab/Simulink (MATHWORKS, R2010b, Massachussets, USA) platform was chosen as virtual environment for simulation because it allows data and results integration with other software, including COMSOL Multiphisycs, that is being used for modeling of ICBP. The dynamic model is necessary to study transients of the motor drive system and steady state. The instantaneous currents are crucial for power computation and electromagnetic torque is important for drive system performance evaluation. These features become a significant factor in appliances such as LVAD (LEÃO, 2012). This paper has been divided into three main parts; the first consist of mathematical modeling that Simulink block uses to represent BLDC motor; the second part that describes the virtual implementation with help of Matlab / Simulink blocks diagram to represent the electromechanical actuator; and third part that shows the computational model validation. Furthermore, the main contribution of this paper is to apply the block Permanent Magnet Synchronous Machine (PMSM) to represent the actuator from ICBP and initial studies about the speed control. 2. MATERIALS AND METHODS 2.1 System equations The model proposed is based on the assumptions that the induced currents in the rotor due to stator harmonic fields are neglected and iron and stray losses are also neglected. According to Krishnan (2010), the coupled circuit equations for “wye” (Y) connected stator windings, see Fig. 3, combining all the relevant equations in terms of electrical motor, magnetics and mechanics constants are in the system space form (1) Where, x= [ Ia Ib Ic ω θ] T (2) Thus the state space matrix becomes: (3) (4) and U=[ Va Vb Vc Tl ] T (5) where: L1 : L-M; L: self inductance of the winding per phase M: The mutual inductance per phase Va ,Vb ,Vc are the per phase impressed voltages on the motor windings. Figure 3. Equivalent Circuit for Y connected stator windings. 2.2 Simulink model The model implemented in MATLAB/SIMULINK used blocks of the SimPowerSystems toolbox. The BLDC was simulated with a block of Permanent Magnet Synchronous Machine (PMSM) with a trapezoidal back electromotive force (BEMF) signal. Electrical and mechanical parts of the machine are represented by a state-space model. The BLDC is connected to an inverter and supplied by a variable source of Direct Current (DC). This source is adjusted by a Proportional Integral (PI) control with feedback of the motor speed. Figure 4 shows block diagram of the actuator. Figure 4. Block Diagram BLDC motor and PI control. The configuration parameters of the block PMSM were obtained from tests performed at the actuator in a device specially constructed for this purpose. The experimental performance of the actuator was obtained in the same test. The experimental data are presented together with the results of the simulations to facilitate discussion. The computational model was simulated under the same experimental conditions. The model was evaluated at three voltages: 16 V, 14 V and 12 V. The torque has been proposed to achieve speeds between 1000 and 3500 rpm. To evaluate the PI controller, the simulations were performed at two fixed speeds: 1500 and 2000 rpm. These speeds the pressure and flow of ICBP is compatible with the ventricular assist. Theses parameters values were based on tests previously carried out (BOCK, 2011; LEÃO, 2009). 3. RESULTS AND DISCUSSION Figure 5 and 6 shows torque – current graphic and torque – speed graphic, respectively. Both graphs are presented in three voltage: 16V, 14V and 12V for experimental and simulated values. Figure 5. Graphic torque – current. Figure 6. Graphic torque – speed. Considering the range of rotation between 1000 and 3500 rpm the difference between simulated and experimental values was less than 10%. The expected accuracy for the model is ± 10%. This target value was adopted based on the experience of the development team of the motor, and consider that modeling errors of this magnitude can be compensated by the controller action. The performance curves of the PI controller are shown in Figures 7 and 8, for the rotation of 1500 rpm and 2000 rpm respectively. The red line indicates the reference value for the controller. In blue is shown the response speed of the controller action in the face of load variations. The curve of the load torque is shown in green. The torque curve has no measurement unit was shown from the original profile of the torque curve, without scale, to facilitate viewing and evaluation of the controller. Figure 7. Graphic PI Controller Performance – 1500 rpm. Figure 8. Graphic PI Controller Performance – 2000 rpm. Note that with the progressive load the PI controller maintained the rotation on reference value. The steady state error was less than 2% for both rotations. 4. CONCLUSION The computational modeling of electromechanical implantable centrifugal pump is the main objective of this work and fundamental to the development of the controller. Thereby, the proposed model was considered satisfactory to represent dynamics in the actuator. The electromagnetic characteristics produced by the model are identical to the characteristics presented in the literature and by previous workbench tests. The result for the expected model accuracy of 10% was attended. The performance of the controller and its ability to control variations on the load, were compared with the steady speed error less than 2%. ACKNOWLEDGMENTS The authors are grateful to IFSP, EPUSP and IDPC for partially supporting this research. REFERENCES Bock, E., Antunes, P., Leão, T., Uebelhart, B., Fonseca, J., Leme, J., Utiyama, B., Silva, C., Cavalheiro, A., Santos Filho, D., Dinkhuysen, J., Biscegli, J., Andrade, A., Arruda, A. (2011), Implantable Centrifugal Blood Pump With Dual Impeller and Double Pivot Bearing System: Electromechanical Actuator, Prototyping, and Anatomical Studies <http://onlinelibrary.wiley.com/doi/10.1111/j.15251594.2011.01260.x/pdf>. Artificial Organs 35(5):437–442,. DOI: 10.1111/j.1525-1594.2011.01260.x. ISSN: 0160564X. Bock, E. et al. (2008), New Centrifugal Blood Pump With Dual Impeller and Double Pivot Bearing System: Wear Evaluation in Bearing System, Performance Tests, and Preliminary Hemolysis Tests. Artificial Organs32(4):329–333. Fonseca, J., Andrade, A., Nicolosi, D., Biscegli, J., Legendre, D., Bock, E., Lucchi, J.. (2008), A New Technique to Control Brushless Motor for Blood Pump Application. Artificial Organs Volume 32, Issue 4, pages 355–359, April 2008. DOI: 10.1111/j.1525-1594.2008.00554.x. Krishnan, R., (2010), Permanent Magnet Synchronous and Brushless DC Motor Drives, Virginia, EUA, Ed. CRC Press. Leão, T., Bock, E., Fonseca, J., Andrade, A., Cavalheiro, A., Uebelhart, B., Cardoso, J., Chabu, I., Campo, A. (2012), Modeling Study of an Implantable Centrifugal Blood Pump Actuator with Redundant Sensorless Control, In: 44th Southeastern Symposium on System Theory, 2012, Jacksonville, FL, USA. Proceedings of the 2012 - 44th Southeastern Symposium on System Theory. Danvers, MA, USA: IEEE Omnipress, 2012. p.174 - 178 Leão, T., Fonseca, J., Andrade, A., Bock, E. (2009), Desempenho “In Vitro” do atuador eletromecânico da bomba de sangue centrífuga implantável. In: 2º Encontro Nacional de Engenharia Biomecânica, 2009, Florianópolis. Proceedings of the 2º Encontro Nacional de Engenharia Biomecânica. Shao, J., Nolan, D., Teissier, M., and Swanson, D. (2003), “A novel microcontroller-based sensorless brushless DC (BLDC) motor drive for automotive fuel pumps,” Transactions on Industrial Applications, Vol. 39, No. 6, pp. 1734-1740.