Implementing our backward order final equation
advertisement

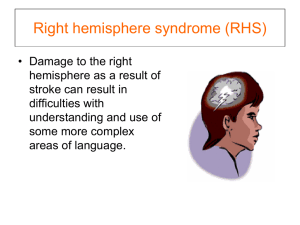
Implementing our backward order final equation Jennifer Tanyer March 27, 2002 Goals: Balance the discretized equation from Bob’s presentation Develop a system of linear equations from the given equation Modify previous code to solve the implicit function and get values for our unknown concentration at time t+1 2 Our backward order discretized equation: From Bob’s presentation: c(k , t 1) c(k , t ) ( t ) D c( x x, y, t 1) c( x x, y, t 1) 2c( x, y, t 1) ( 2 (x) c( x, y y, t 1) c( x, y y, t 1) 2c( x, y, t 1) ) 2 (y ) c( x x, y, t 1) c( x x, y, t 1) ux ( ) 2(x) c( x, y y, t 1) c( x, y y, t 1) uy ( ) 2(y ) 3 Problems with this equation: The system is not balanced. i.e.(# of variables on the LHS # of variables on the RHS) LHS accounts for interior nodes only RHS accounts for interior and boundary nodes # of Unknowns > #of Equations because of this. The difference in the number is due to the lack of representation for the boundary points 4 Solutions: Add the boundary condition for each boundary node onto the LHS of the equation: c(x,y,t) = 0. Since we can’t solve this system explicitly, we must generate a system of linear equations that establish an algorithm for solving for our unknowns Our unknown : concentration at time t + 1 5 Step 1: Developing the new linear system Place all of our unknowns: t + 1 onto the LHS of our equation The RHS will be equal to our concentration at time t 6 Step 1: c(k , t ) c ( k , t 1) ( t ) ( t ) D c( x x, y, t 1) c( x x, y, t 1) 2c( x, y, t 1) ( 2 (x) c( x, y y, t 1) c( x, y y, t 1) 2c( x, y, t 1) ) 2 (y ) c( x x, y, t 1) c( x x, y, t 1) ux ( ) 2(x) c( x, y y, t 1) c( x, y y, t 1) uy ( ) 2(y ) 7 Step 2: Replace equations with their proper node labels c(k , t ) ( t ) 2XK XE X W ( 2 2 2 X K D ( x ) ( x ) ( x ) t XN 2 X X S K ) 2 2 2 (y ) (y ) (y ) u x( u y( X E X N X w X S 2 ( x ) 2 ( x ) 2 ( y ) 2 ( y ) ) ) 8 Step 3: Combine like terms LHS 1 D 2 D 2 ( X K t ( x ) 2 ( y ) 2 ) D 1 1 X E ( ( x ) 2 u x 2 ( x ) ) D 1 1 ( X W ( x ) 2 u x 2( x ) ) D 1 1 X N ( ( y ) 2 u y 2 ( y ) ) D 1 1 X S ( ( y ) 2 u y 2 ( y ) ) RHS K Refer to poisson.m These new combined equations will represent w(k,k), w(k,E), w(k,W), w(k,N), and w(k,S) respectively. 9 Step 4: Implement the new equation into ‘concentrate.m’ %Modified concentrate.m deltat=0.5; D=0.1; rho=1; time=10; ntimes=round(time/deltat); NRPOINTS=max(size(a10)); for k=1:NRPOINTS Position=a10(k,1:2); Concentration(k,1)=g(Position); end 10 Modified concentration.m continued… for m=1:ntimes m w = zeros(1528, 1528); rhs = zeros(1528,1); deltaXsq = 1/deltaX^2; deltaYsq = 1/deltaY^2; for k = 1:1528 N = nb(k,find((nbor(k,:) == 1))); W = nb(k,find((nbor(k,:) == 3))); S = nb(k,find((nbor(k,:) == 5))); E = nb(k,fgind((nbor(k,:) == 7))); 11 gAnd finally… if(~g(N) & ~isempty(W) & ~isempty(S) & ~isempty(E)) ux = scaledvelocity(k,1); uy = scaledvelocity(k,2); w(k,N) = ((D/rho) * (1/deltaYsq) – uy * (1/(deltaY)*2)); w(k,S) = ((D/rho) * (1/deltaYsq) + uy * (1/(deltaY)*2)); w(k,E) = ((D/rho) * (1/deltaXsq) - ux * (1/(deltaX)*2)); w(k,W) = ((D/rho) * (1/deltaXsq) + ux * (1/(deltaX)*2)); w(k,k) = (-1/deltat – (D/rho)*(2/(deltaXsq)) – (D/rho) *(2/(deltaYsq)); rhs(k,1) = concentration(k,m)/deltat; else w(k,k) = 1; rhs(k,1) = 0; end end xjen=w\rhs; 12 In the End… You now have an algorithm of linear equations that you can solve to get a 1532 x 1532 matrix of concentrations at each node. You can use MATLAB to solve Ax = b (w * x) = rhs by using either 1.The inverse of A >>x=inv(A)*b OR 2.Row Reduction >>x1=A\b We no longer have approximate values for our concentrations…we now have actual values 13