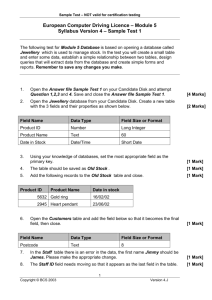
116_Presentation for CS 257 (006530706)
advertisement
")
PRESENTATION FOR
CS 257
DATABASE PRINCIPLES
1
Submitted to : Dr T.Y Lin
Prepared By: Ronak Shah(116)
(006530706)
CHAPTERS COVERED
Chapter
13. Secondary storage
Chapter 15. Query execution
Chapter 16. Query complier
Chapter 18. Concurrency control
Chapter 21. information Integration
2
CHAPTER 13
SECONDARY STORAGE
13.1 Secondary Storage Management
13.2 Disks
13.3 Accelerating Access to Secondary Storage
13.4 Recovery from Disk Crashes
13.5 Arranging data on disk
13.6 Representing Block and Record Addresses
13.7 Variable length data and record
13.8 Record Modification
3
13.1 SECONDARY STORAGE
MANAGEMENT
In Secondary Storage Management Database
systems always involve secondary storage like
the disks and other devices that store large
amount of data that persists over time.
4
MEMORY HIERARCHY
A typical computer system has several different
components in which data may be stored.
These components have data capacities ranging
over at least seven orders of magnitude and also
have access speeds ranging over seven or more
orders of magnitude.
5
DIAGRAM OF MEMORY
HIERARCHY
6
CACHE MEMORY
It
is the lowest level of the hierarchy is a
cache. Cache is found on the same chip as
the microprocessor itself, and additional
level-2 cache is found on another chip.
Data and instructions are moved to cache
from main memory when they are needed
by the processor.
Cache data can be accessed by the
processor in a few nanoseconds.
7
MAIN MEMORY
In
the center of the action is the
computer's main memory. We may think
of everything that happens in the
computer - instruction executions and
data manipulations - as working on
information that is resident in main
memory
Typical times to access data from main
memory to the processor or cache are in
the 10-100 nanosecond range
8
SECONDARY STORAGE
Essentially every computer has some sort of
secondary storage, which is a form of storage that
is both significantly slower and significantly
more capacious than main memory.
The time to transfer a single byte between disk
and main memory is around 10 milliseconds.
9
TERTIARY STORAGE
As
capacious as a collection of disk units
can be, there are databases much larger
than what can be stored on the disk(s) of a
single machine, or even of a substantial
collection of machines.
Tertiary storage devices have been
developed to hold data volumes measured
in terabytes.
Tertiary storage is characterized by
significantly higher read/write times than
secondary storage, but also by much
larger capacities and smaller cost per byte
than is available from magnetic disks.
10
TRANSFER OF DATA BETWEEN
LEVELS
Normally, data moves between adjacent
levels of the hierarchy.
At the secondary and tertiary levels,
accessing the desired data or finding the
desired place to store data takes a great
deal of time, so each level is organized to
transfer large amount of data or from the
level below, whenever any data at all is
needed.
The disk is organized into disk blocks and
the entire blocks are moved to or from a
continuous section of main memory called
a buffer
11
VOLATILE AND NONVOLATILE
STORAGE:
A
volatile device "forgets" what is stored
in it when the power goes off.
A nonvolatile device, on the other hand, is
expected to keep its contents intact even
for long periods when the device is turned
off or there is a power failure.
Magnetic and optical materials hold their
data in the absence of power. Thus,
essentially all secondary and tertiary
storage devices are nonvolatile. On the
other hand main memory is generally
volatile.
12
VIRTUAL MEMORY
When
we write programs the data we use,
variables of the program, files read and so
on occupies a virtual memory address
space.
Many machines use a 32-bit address
space; that is, there are 2(pow)32 bytes or
4 gigabytes.
The Operating System manages virtual
memory, keeping some of it in main
memory and the rest on disk.
Transfer between memory and disk is in
units of disk blocks
13
13.2 DISKS
The use of secondary storage is one of the
important characteristics of a DBMS, and
secondary storage is almost exclusively based on
magnetic disks
14
MECHANICS OF DISKS
The
two principal moving pieces of a disk
drive are a disk assembly and a head
assembly.
The disk assembly consists of one or more
circular platters that rotate around a
central spindle
The upper and lower surfaces of the
platters are covered with a thin layer of
magnetic material, on which bits are
stored.
15
DIAGRAM FOR DISK MANAGEMENT
16
0’S AND 1’S ARE REPRESENTED BY DIFFERENT PATTERNS
IN THE MAGNETIC MATERIAL.
A COMMON DIAMETER FOR THE DISK PLATTERS IS 3.5
INCHES.DISK IS ORGANIZED INTO TRACKS, WHICH ARE
CONCENTRIC CIRCLES ON A SINGLE PLATTER.THE TRACKS
THAT ARE AT A FIXED RADIUS FROM A CENTER, AMONG ALL
THE SURFACES FORM ONE CYLINDER.
TRACKS ARE ORGANIZED INTO SECTORS, WHICH ARE
SEGMENTS OF THE CIRCLE SEPARATED BY GAPS THAT ARE
MAGNETIZED TO REPRESENT EITHER 0’S OR 1’S. THE
SECOND MOVABLE PIECE THE HEAD ASSEMBLY, HOLDS THE
DISK HEADS.
17
THE DISK CONTROLLER
One or more disk drives are controlled by a disk
controller, which is a small processor capable of:
Controlling the mechanical actuator that moves the
head assembly to position the heads at a particular
radius.
Transferring bits between the desired sector and the
main memory.
Selecting a surface from which to read or write, and
selecting a sector from the track on that surface that is
under the head.
18
An example of single processor is shown in next slide.
SIMPLE COMPUTER ARCHITECTURE
SYSTEM
19
DISK ACCESS
CHARACTERISTICS
Seek Time: The disk controller positions the head
assembly at the cylinder containing the track on
which the block is located. The time to do so is
the seek time.
Rotational Latency: The disk controller waits
while the first sector of the block moves under
the head. This time is called the rotational
latency.
Transfer Time: All the sectors and the gaps
between them pass under the head, while the
disk controller reads or writes data in these
sectors. This delay is called the transfer time.
20
The sum of the seek time, rotational latency, transfer time
is the latency of the time.
13.3 ACCELERATING ACCESS TO
SECONDARY STORAGE
Several approaches for more-efficiently
accessing data in secondary storage:
Place blocks that are together in the same cylinder.
Divide the data among multiple disks.
Mirror disks.
Use disk-scheduling algorithms.
Prefetch blocks into main memory.
Scheduling Latency – added delay in
accessing data caused by a disk scheduling
algorithm.
Throughput – the number of disk accesses per
21
second that the system can accommodate.
THE I/O MODEL OF COMPUTATION
The number of block accesses (Disk I/O’s) is a
good time approximation for the algorithm.
This should be minimized.
Ex 13.3: You want to have an index on R to
identify the block on which the desired tuple
appears, but not where on the block it resides.
For Megatron 747 (M747) example, it takes 11ms to
read a 16k block.
A standard microprocessor can execute millions of
instruction in 11ms, making any delay in searching for
the desired tuple negligible.
22
ORGANIZING DATA BY CYLINDERS
If we read all blocks on a single track or
cylinder consecutively, then we can neglect all
but first seek time and first rotational latency.
Ex 13.4: We request 1024 blocks of M747.
If data is randomly distributed, average latency is
10.76ms by Ex 13.2, making total latency 11s.
If all blocks are consecutively stored on 1 cylinder:
6.46ms + 8.33ms * 16 = 139ms
(1 average seek)
(time per rotation)
(# rotations)
23
USING MULTIPLE DISKS
If we have n disks, read/write performance will
increase by a factor of n.
Striping – distributing a relation across multiple
disks following this pattern:
Data on disk R1: R1, R1+n, R1+2n,…
Data on disk R2: R2, R2+n, R2+2n,…
…
Data on disk Rn: Rn, Rn+n, Rn+2n, …
Ex 13.5: We request 1024 blocks with n = 4.
6.46ms + (8.33ms * (16/4)) = 39.8ms
24
(1 average seek)
(time per rotation)
(# rotations)
MIRRORING DISKS
Mirroring Disks – having 2 or more disks hold
identical copied of data.
Benefit 1: If n disks are mirrors of each other, the
system can survive a crash by n-1 disks.
Benefit 2: If we have n disks, read performance
increases by a factor of n.
Performance increases further by having the
controller select the disk which has its head closest to
desired data block for each read.
25
DISK SCHEDULING AND THE
ELEVATOR PROBLEM
Disk controller will run this algorithm to select which
of several requests to process first.
Pseudo code:
requests[]
// array of all non-processed data
requests
upon receiving new data request:
requests[].add(new request)
while(requests[]
is not empty)
move head to next location
if(head location is at data in requests[])
retrieve data
remove data from requests[]
if(head reaches end)
reverse head direction
26
DISK SCHEDULING AND THE
ELEVATOR PROBLEM (CON’T)
Events:
Head starting point
Request data at 8000
Request data at 24000
Request data at 56000
Get data at 8000
Request data at 16000
Get data at 24000
Request data at 64000
Get data at 56000
Request Data at 40000
Get data at 64000
Get data at 40000
Get data at 16000
64000
56000
48000
40000
32000
24000
16000
8000
Current
time
13.6
26.9
34.2
45.5
56.8
4.3
10
20
30
0
data
time
8000..
4.3
24000..
13.6
56000..
26.9
64000..
27
40000..
45.5
16000..
56.8
34.2
DISK SCHEDULING AND THE
ELEVATOR PROBLEM (CON’T)
Elevator
Algorithm
data
time
FIFO
Algorithm
data
time
8000..
4.3
8000..
4.3
24000..
13.6
24000..
13.6
56000..
26.9
56000..
26.9
64000..
34.2
16000..
42.2
40000..
45.5
64000..
59.5
16000..
56.8
40000..
70.8
28
PRE FETCHING AND LARGE-SCALE
BUFFERING
If at the application level, we can predict the order
blocks will be requested, we can load them into main
memory before they are needed.
29
13.4 RECOVERY FROM DISK CRASHES
Ways
to recover data
The most serious mode of failure for disks is “head crash”
where data permanently destroyed.
So to reduce the risk of data loss by disk crashes there are
number of schemes which are know as RAID (Redundant
Arrays of Independent Disks) schemes.
Each of the schemes starts with one or more disks that
hold the data and adding one or more disks that hold
information that is completely determined by the contents
of the data disks called Redundant Disk.
30
MIRRORING /REDUNDANCY
TECHNIQUE
Mirroring Scheme is referred as RAID level 1
protection against data loss scheme.
In this scheme we mirror each disk.
One of the disk is called as data disk and other
redundant disk.
In this case the only way data can be lost is if there
is a second disk crash while the first crash is being
repaired.
31
PARITY BLOCKS
RAID level 4 scheme uses only one redundant disk
no matter how many data disks there are.
In the redundant disk, the ith block consists of the
parity checks for the ith blocks of all the data
disks.
It means, the jth bits of all the ith blocks of both
data disks and redundant disks, must have an
even number of 1’s and redundant disk bit is used
to make this condition true.
32
PARITY BLOCKS – READING DISK
Reading data disk is same as reading block from
any disk.
We could read block from each of the other disks and
compute the block of the disk we want to read by taking the
modulo-2 sum.
disk 2: 10101010
disk 3: 00111000
disk 4: 01100010
If we take the modulo-2 sum of the bits in each column, we
get
disk 1: 11110000
33
PARITY BLOCK - WRITING
When
we write a new block of a data disk, we
need to change that block of the redundant
disk as well.
One
approach to do this is to read all the
disks and compute the module-2 sum and
write to the redundant disk.
But this approach requires n-1 reads of data,
write a data block and write of redundant
disk block.
Total = n+1 disk I/Os
34
CONTINUED………………
Better
approach will require only four disk I/Os
1. Read the old value of the data block being
changed.
2. Read the corresponding block of the redundant
disk.
3. Write the new data block.
4. Recalculate and write the block of the
redundant disk.
35
PARITY BLOCKS – FAILURE
RECOVERY
If any of the data disk crashes then we just have to
compute the module-2 sum to recover the disk.
Suppose that disk 2 fails. We need to re compute each block
of the replacement disk. We are given the corresponding
blocks of the
first and third data disks and the redundant disk, so the
situation looks like:
disk 1: 11110000
disk 2: ????????
disk 3: 00111000
disk 4: 01100010
If we take the modulo-2 sum of each column, we deduce
that the missing block of disk 2 is : 10101010
36
AN IMPROVEMENT: RAID 5
RAID 4 is effective in preserving data unless there are
two simultaneous disk crashes.
Whatever scheme we use for updating the disks, we need
to read and write the redundant disk's block. If there are
n data disks, then the number of disk writes to the
redundant disk will be n times the average number of
writes to any one data disk.
However we do not have to treat one disk as the
redundant disk and the others as data disks. Rather, we
could treat each disk as the redundant disk for some of
the blocks. This improvement is often called RAID level 5.
37
CONTINUE : AN IMPROVEMENT: RAID 5
For instance, if there are n + 1 disks numbered 0
through n, we could treat the ith cylinder of disk j as
redundant if j is the remainder when i is divided by n+1.
For example, n = 3 so there are 4 disks. The first disk,
numbered 0, is redundant for its cylinders numbered 4,
8, 12, and so on, because these are the numbers that
leave remainder 0 when divided by 4.
The disk numbered 1 is redundant for blocks numbered
1, 5, 9, and so on; disk 2 is redundant for blocks 2, 6.
10,. . ., and disk 3 is redundant for 3, 7, 11,. . . .
38
COPING WITH MULTIPLE DISK CRASHES
Error-correcting
codes theory known as
Hamming code leads to the RAID level 6.
By
this strategy the two simultaneous crashes
are correctable.
The bits of disk 5 are the modulo-2 sum of the
corresponding bits of disks 1, 2, and 3.
The bits of disk 6 are the modulo-2 sum of the
corresponding bits of disks 1, 2, and 4.
The bits of disk 7 are the module2 sum of the
corresponding bits of disks 1, 3, and 4
39
COPING WITH MULTIPLE DISK CRASHES
– READING/WRITING
We
may read data from any data disk normally.
To
write a block of some data disk, we compute the
modulo-2 sum of the new and old versions of that
block. These bits are then added, in a modulo-2
sum, to the corresponding blocks of all those
redundant disks that have 1 in a row in which the
written disk also has 1.
40
13.5 ARRANGING DATA ON DISK
Data elements are represented as records, which
stores in consecutive bytes in same disk block.
Basic layout techniques of storing data :
Fixed-Length Records
Allocation criteria - data should start at word boundary.
Fixed Length record header
A pointer to record schema.
The length of the record.
Timestamps to indicate last modified or last read.
41
EXAMPLE
CREATE TABLE employee(
name CHAR(30) PRIMARY KEY,
address VARCHAR(255),
gender CHAR(1),
birthdate DATE
);
Data should start at word boundary and contain header and
four fields name, address, gender and birthdate.
42
PACKING FIXED-LENGTH RECORDS INTO BLOCKS
Records are stored in the form of blocks on the
disk and they move into main memory when we
need to update or access them.
A block header is written first, and it is followed
by series of blocks.
43
BLOCK HEADER CONTAINS THE FOLLOWING
INFORMATION
Links to one or more blocks that are part of a
network of blocks.
Information about the role played by this block
in such a network.
Information about the relation, the tuples in
this block belong to.
A "directory" giving the offset of each record in
the block.
Time stamp(s) to indicate time of the block's
last modification and/or access.
44
EXAMPLE
Along with the header we can pack as many
record as we can in one block as shown in the
figure and remaining space will be unused.
45
13.7 VARIABLE LENGTH DATA AND
RECORD
A simple but effective scheme is to put all
fixed length fields ahead of the variablelength fields. We then place in the record
header:
1. The length of the record.
2. Pointers to (i.e., offsets of) the beginnings of
all the variable-length fields. However, if the
variable-length fields always appear in the
same order then the first of them needs no
pointer; we know it immediately follows the
fixed-length fields.
46
RECORDS WITH REPEATING FIELDS
A similar situation occurs if a record contains a variable
number of Occurrences of a field F, but the field itself is of
fixed length. It is sufficient to group all occurrences of field
F
together and put in the record header a pointer to the first.
We can locate all the occurrences of the field F as follows.
Let the number of bytes devoted to one instance of field F be
L. We then add to the offset for the field F all integer
multiples of L, starting at 0, then L, 2L, 3L, and so on.
Eventually, we reach the offset of the field following F.
Where upon we stop.
47
An alternative representation is to keep the
record of fixed length, and put the variable
length portion - be it fields of variable length or
fields that repeat an indefinite number of times on a separate block. In the record itself we keep:
– Pointers to the place where each repeating field
begins, and
– Either how many repetitions there are, or where the
repetitions end.
48
STORING VARIABLE-LENGTH FIELDS
SEPARATELY FROM THE RECORD
49
VARIABLE-FORMAT RECORDS
The
simplest representation of variable-format
records is a sequence of tagged fields, each of
which consists of:
1. Information about the role of this field,
such as:
(a) The attribute or field name,
(b) The type of the field, if it is not apparent
from the field name and some readily available
schema information, and
(c) The length of the field, if it is not apparent
from the type.
2. The value of the field.
50
There are at least two reasons why tagged fields would make
sense.
1. Information integration applications - Sometimes, a
relation has been constructed from several earlier sources,
and these sources have different kinds of information For
instance, our movie star information may have come from
several sources, one of which records birthdates, some give
addresses, others not, and so on. If there are not too many
fields, we are probably best off leaving NULL those values
we do not know.
2. Records with a very flexible schema - If many fields of a
record can repeat and/or not appear at all, then even if we
know the schema, tagged fields may be useful. For instance,
medical records may contain information about many tests,
but there are thousands of possible tests, and each patient
has results for relatively few of them.
51
A RECORD WITH TAGGED FIELDS
52
RECORDS THAT DO NOT FIT IN A BLOCK
These
large values have a variable length, but even if
the length is fixed for all values of the type, we need
to use some special techniques to represent these
values. In this section we shall consider a technique
called “spanned records" that can be used to manage
records that are larger than blocks.
Spanned
records also are useful in situations where
records are smaller than blocks, but packing whole
records into blocks wastes significant amounts of
space.
For both these reasons, it is sometimes desirable to
allow records to be split across two or more blocks.
The portion of a record that appears in one block is
53
called a record fragment.
If records can be spanned, then every record and
record fragment requires some extra header
information:
1. Each record or fragment header must contain a bit
telling whether or not it is a fragment.
2. If it is a fragment, then it needs bits telling whether
it is the first or last fragment for its record.
3. If there is a next and/or previous fragment for the
same record, then the fragment needs pointers to
these other fragments.
54
Storing spanned records across blocks
BLOBS
• Binary, Large OBjectS = BLOBS
• BLOBS can be images, movies, audio files and other very large
values that can be stored in files.
• Storing BLOBS
– Stored in several blocks.
– Preferable to store them consecutively on a cylinder or
multiple disks for efficient retrieval.
• Retrieving BLOBS
– A client retrieving a 2 hour movie may not want it all at the
same time.
– Retrieving a specific part of the large data requires an index
structure to make it efficient. (Example: An index by seconds
on a movie BLOB.)
55
COLUMN STORES
An alternative to storing tuples as records is to store
each column as a record. Since an entire column of a
relation may occupy far more than a single block, these
records may span many block, much as long as files do.
If we keep the values in each column in the same order
then we can reconstruct the relation from column
records
56
13.6 REPRESENTING BLOCK AND
RECORD ADDRESSES
INTRODUCTION
Address of a block and Record
In Main Memory
Address of the block is the virtual memory address
of the first byte
Address of the record within the block is the
virtual memory address of the first byte of the
record
In Secondary Memory: sequence of bytes describe the
location of the block in the overall system
Sequence of Bytes describe the location of the
block : the device Id for the disk, Cylinder
number, etc.
57
ADDRESSES IN CLIENT-SERVER SYSTEMS
The addresses in address space are represented
in two ways
Physical Addresses: byte strings that determine the
place within the secondary storage system where the
record can be found.
Logical Addresses: arbitrary string of bytes of some
fixed length
Physical Address bits are used to indicate:
Host to which the storage is attached
Identifier for the disk
Number of the cylinder
Number of the track
Offset of the beginning of the record
58
ADDRESSES IN CLIENT-SERVER SYSTEMS
(CONTD..)
Map Table relates logical addresses to physical
addresses.
Logical
Physical
Logical Address
Physical Address
59
LOGICAL AND STRUCTURED ADDRESSES
Purpose of logical address?
Gives more flexibility, when we
Move the record around within the block
Move the record to another block
Gives us an option of deciding what to do when a
record is deleted?
Unused
Rec
ord
4
Offset table
Header
Rec
ord
3
Rec
ord
2
Rec
ord
1
60
POINTER SWIZZLING
Having pointers is common in an objectrelational database systems
Important to learn about the management of
pointers
Every data item (block, record, etc.) has two
addresses:
database address: address on the disk
memory address, if the item is in virtual
memory
61
POINTER SWIZZLING (CONTD…)
Translation Table: Maps database address to
memory address
Dbaddr
Mem-addr
Database address
Memory Address
All addressable items in the database have
entries in the map table, while only those items
currently in memory are mentioned in the
translation table
62
POINTER SWIZZLING (CONTD…)
Pointer consists of the following two fields
Bit indicating the type of address
Database or memory address
Example 13.17
Dis
k
Memory
Swizzled
Block 1
Block 1
Unswizzle
d
Block 2
63
EXAMPLE 13.7
Block 1 has a record with pointers to a second
record on the same block and to a record on
another block
If Block 1 is copied to the memory
The first pointer which points within Block 1 can be
swizzled so it points directly to the memory address
of the target record
Since Block 2 is not in memory, we cannot swizzle
the second pointer
64
POINTER SWIZZLING (CONTD…)
Three types of swizzling
Automatic Swizzling
Swizzling on Demand
As soon as block is brought into memory, swizzle all
relevant pointers.
Only swizzle a pointer if and when it is actually followed.
No Swizzling
Pointers are not swizzled they are accesses using the
database address.
65
PROGRAMMER CONTROL OF SWIZZLING
Unswizzling
When a block is moved from memory back to disk, all
pointers must go back to database (disk) addresses
Use translation table again
Important to have an efficient data structure for the
translation table
66
PINNED RECORDS AND BLOCKS
A block in memory is said to be pinned if it
cannot be written back to disk safely.
If block B1 has swizzled pointer to an item in
block B2, then B2 is pinned
Unpin a block, we must unswizzle any pointers to it
Keep in the translation table the places in memory
holding swizzled pointers to that item
Unswizzle those pointers (use translation table to
replace the memory addresses with database (disk)
addresses
67
13.8 RECORD MODIFICATION
When a data manipulation operation is performed ,
called as record Modification
Example: Record Structure for a person Table
CREATE TABLE PERSON ( NAME CHAR(30), ADDRESS CHAR(256)
, GENDER CHAR(1), BIRTHDATE CHAR(10));
68
TYPES OF RECORDS
Fixed length Records
•
Varaible Length Records
•
CREATE TABLE SJSUSTUDENT(STUDENT_ID INT(9) NOT NULL ,
PHONE_NO INT(10) NOT NULL);
CREATE TABLE SJSUSTUDENT(STUDENT_ID INT(9) NOT NULL,NAME
CHAR(100) ,ADDRESS CHAR(100) ,PHONE_NO INT(10) NOT NULL);
Record Modification
•
Insert, update & delete
69
STRUCTURE OF A BLOCK & RECORDS
Various Records are clubbed together and stored
together in memory in blocks
Structure of a Block
70
BLOCKS & RECORDS
If records need not be any particular order, then just
find a block with enough empty space
We keep track of all records/tuples in a relation/tables
using Index structures, File organization concepts
71
INSERTING NEW RECORDS
If
Records are not required to be a particular
order, just find an empty block and place the
record in the block.eg: Heap Files
What if the Records are to be Kept in a
particular Order (eg: sorted by primary key) ?
Locate appropriate block,check if space is
available in the block if yes place the record in
the block.
72
INSERTING NEW RECORDS
We may have to slide the Records in the Block to place
the Record at an appropriate place in the Block and
suitably edit the block header.
73
WHAT IF THE BLOCK IS FULL ?
We need to Keep the record in a particular block but
the block is full. How do we deal with it ?
We find room outside the Block
There are 2 approaches to finding the room for the
record.
I. Find Space on Nearby Block
II. Create an Overflow Block
74
APPROACHES TO FINDING ROOM FOR RECORD
Find a space on nearby block
Block B1 has no space
If space is available on block B2 move records of B1 tp
B2
If there are external Pointers to records of B1 Moved to
B2 Leave Forwarding Address in offset Table of B1
75
APPROACHES TO FINDING ROOM FOR
RECORD
Create Overflow block
Each Block B has in its header pointer to an overflow
block where additional blocks of B can be placed
76
DELETION
Try to reclaim the space available on a record after
deletion of a particular record
If an offset table is used for storing information about
records for the block then rearrange/slide the
remaining records.
If Sliding of records is not possible then maintain a
SPACE-AVAILABLE LIST to keep track of space
available on the Record.
77
TOMSTONE
What about pointer to deleted records ?
A tombstone is placed in place of each deleted record
A tombstone is a bit placed at first byte of deleted record
to indicate the record was deleted ( 0 – Not Deleted 1 –
Deleted)
A tombstone is permanent
78
UPDATING RECORDS
For Fixed-Length Records, there is no effect on the
storage system
For variable length records :
If length increases, like insertion “slide the records”
• If length decreases, like deletion we update the spaceavailable list, recover the space/eliminate the overflow
blocks.
•
79
CHAPTER 15
QUERY EXECUTION
15.1 Introduction to Physical-Query-Plan Operators
15.2 One-Pass Algorithms for Database Operations
15.3 Nested-Loop Joins
15.4 Two-Pass Algorithms Based on Sorting
15.5 Two-Pass Algorithms Based on Hashing
15.6 Index-Based Algorithms
15.7 Buffer Management
15.8 Algorithms Using More Than Two Passes
15.9 Parallel Algorithms for Relational Operations
80
QUERY COMPILATION
Query compilation is divided into 3 major
steps:
Parsing, in which a parse tree construct
the structure and query
Query rewrite, in which the parse tree is
converted to an initial query plan, which
is an algebraic representation of the
query.
Physical Plan Generation, where the
abstract query plan is converted into
physical query plan.
81
QUERY COMPILATION
82
15.1 INTRODUCTION TO PHYSICALQUERY-PLAN OPERATORS
Physical query plans are built from the operators
each of which implements one step of the plan.
Physical operators can be implementations of the
operators of relational algebra.
However they can also be operators of nonrelational algebra like ‘scan’ operator used for
scanning tables.
83
FOR SCANNING A TABLE
We have two different approach
Table scan
Relation R is stored in secondary memory with its
tuples arranged in blocks. It is possible to get the
blocks one by one
Index scan
if there is an index on any attribute of relation R,
then we can use this index to get all the tuples of R.
84
SORTING IS THE MAJOR TOPIC
WHILE SCANNING THE TABLE
Reasons why we need sorting while scanning
tables
Various algorithms for relational-algebra operations
require one or both of their arguments to be sorted
relation
The query could include an ORDER BY clause.
Requiring that a relation be sorted
A Physical-query-plan operator sort-scan takes a
relation R and a specification of the attributes on which
the sort is to be made, and produces R in that sorted
order.
If we are to produce a relation R sorted by attribute a, and
if there is a B-tree index on a, then index scan is used.
If relation R is small enough to fit in main memory, then we
can retrieve its tuples using a table scan.
85
PARAMETERS FOR MEASURING COSTS
Parameters that mainly affect the performance of a
query are:
1.
2.
3.
The cost mainly depends upon size of memory block on the
disk and the size in the main memory affects the
performance of a query.
Buffer space availability in the main memory at the time of
execution of the query.
Size of input and the size of the output generated
This are the number of disk I/O’s needed for each of
the scan operators.
1.
2.
3.
If a relation R is clustered, then the number of disk I/O’s is
approximately B where B is the number of blocks where R
is stored.
If R is clustered but requires a two phase multi way merge
sort then the total number of disk i/o required will be 3B.
If R is not clustered, then the number of required disk I/0's
is generally much higher.
86
IMPLEMENTATION OF PHYSICAL
OPERATOR
The three major functions are open(), getnext(),
close()
Open() we have to start process by getting tuples and
initialize the data structure and perform operation.
Getnext() this function returns the next tuple in
result
Close() finally closes all operation and function
87
15.2 ONE-PASS ALGORITHMS FOR
DATABASE OPERATIONS
To
transform a logical query plan into a
physical query a algorithm is required.
Main classes of Algorithms:
Sorting-based methods
Hash-based methods
Index-based methods
Division
cost:
based on degree difficulty and
1-pass algorithms
2-pass algorithms
3 or more pass algorithms
88
ONE-PASS ALGORITHM METHODS
One-Pass Algorithms for Tuple-at-a-Time
Operations (Unary operation) such as Selection &
projection.
read the blocks of R one at a time into an input
buffer
perform the operation on each tuple
move the selected tuples or the projected
tuples to the output buffer
The disk I/O requirement for this process
depends only on how the argument relation R is
provided.
If R is initially on disk, then the cost is
whatever it takes to perform a table-scan or
index-scan of R.
89
THE BLOCK DIAGRAM THE MEMORY
OPERATION PERFORMED USING ONE
PASS ALGORITHM TUPLE-AT-A TIME
OPERATION FIGURE(1) AND OTHER FOR
DUPLICATION ELIMINATION OF
RECORDS
90
Figure(1)
Figure(2)
Ref: - Database Complete Book By Hector Garcia-Molina,Jeffrey D. UllmanJennifer Widom
ONE-PASS ALGORITHMS FOR UNARY,
FILL-RELATION OPERATIONS
Duplicate
Elimination
To eliminate duplicates, we can read each
block of R one at a time, but for each tuple we
need to make a decision as to whether:
It is the first time we have seen this tuple, in
which case we copy it to the output, or
2. We have seen the tuple before, in which case we
must not output this tuple.
1.
One memory buffer holds one block of R's
tuples, and the remaining M - 1 buffers can be
used to hold a single copy of every tuple.
91
DUPLICATION ELIMINATION
CONTINUED……….
When a new tuple from R is considered, we compare it with
all tuples
if it is not equal: copy both to the output and add it to the inmemory list of tuples we have seen.
if there are n tuples in main memory: each new tuple takes
processor time proportional to n, so the complete operation
takes processor time proportional to n2.
We need a main-memory structure that allows each of the
operations:
Add a new tuple, and
Tell whether a given tuple is already there
Note: Basic data structure that are used for searching and
sorting is
Hash table
Balanced binary search tree
92
ONE-PASS ALGORITHMS FOR
UNARY, FILL-RELATION
OPERATIONS
Grouping
The grouping operation gives us zero or more grouping
attributes and presumably one or more aggregated attributes.
If we create in main memory one entry for each group then we
can scan the tuples of R, one block at a time. The entry for a
group consists of values for the grouping attributes and an
accumulated value or values for each aggregation.
Min() or Max() ,Avg() ,Count (), sum()
Binary
operations include
Union
Intersection
Difference
Product
Join
93
BINARY OPERATION
We read S into M - 1 buffers of main memory and
build a search structure where the search key is
the entire tuple.
All these tuples are also copied to the output.
Read each block of R into the Mth buffer, one at a time.
Set Union : - For each tuple t of R, see if t is in S, and if
Set intersection: -Read each block of R, and for each
Set Difference: - Read each block of R, and for each
not, we copy t to the output. If t is also in S, we skip t.
tuple t of R, see if t is also in S. If so, copy t to the output,
and if not, ignore t.
tuple t of R, see if t is also in S. then copy the remaining
that are not in R to the ouput.
94
CONTINUED………………
Bag Difference
S -B R, read tuples of S into main memory & count no. of
occurrences of each distinct tuple
Then read R; check each tuple t to see whether t occurs in S,
and if so, decrement its associated count. At the end, copy to
output each tuple in main memory whose count is positive, &
no. of times we copy it equals that count.
To compute R -B S, read tuples of S into main memory & count
no. of occurrences of distinct tuples.
Think of a tuple t with a count of c as c reasons not to copy t to
the output as we read tuples of R.
Read a tuple t of R; check if t occurs in S. If not, then copy t to
the output. If t does occur in S, then we look at current count c
associated with t. If c = 0, then copy t to output. If c > 0, do not
95
copy t to output, but decrement c by 1.
CONTINUED….
Product
Read S into M - 1 buffers of main memory. Then read each block of R, and
for each tuple t of R concatenate t with each tuple of S in main memory.
Output each concatenated tuple as it is formed.
Natural Join
To compute the natural join, do the following:
1.
Read all tuples of S & form them into a main-memory search structure.
Hash table or balanced tree are good e.g. of such structures. Use M - 1
blocks of memory for this purpose.
2.
Read each block of R into 1 remaining main-memory buffer.
For each tuple t of R, find tuples of S that agree with t on all attributes
of Y, using the search structure.
For each matching tuple of S, form a tuple by joining it with t,
& move resulting tuple to output.
96
15.3 NESTED LOOPS JOINS
Tuple-Based Nested-Loop Join
The simplest variation of nested-loop join has loops
that range over individual tuples of the relations
involved. In this algorithm, which we call tuplebased nested-loop join, we compute the join as
follows
For each tuple s in S DO
For each tuple r in R Do
if r and s join to make a tuple t THEN
output t;
97
If
we are careless about how the buffer the
blocks of relations R and S, then this algorithm
could require as many as T(R)T(S) disk .there
are many situations where this algorithm can
be modified to have much lower cost.
One
case is when we can use an index on the
join attribute or attributes of R to find the
tuples of R that match a given tuple of S,
without having to read the entire relation R.
The
second improvement looks much more
carefully at the way tuples of R and S are
divided among blocks, and uses as much of the
memory as it can to reduce the number of disk
I/O's as we go through the inner loop. We shall 98
consider this block-based version of nested-loop
join.
AN ITERATOR FOR TUPLE-BASED NESTEDLOOP JOIN
Open() {
R.Open();
S.open();
A:=S.getnext();
}
GetNext() {
Repeat {
r:= R.Getnext();
IF(r= Not found) {/* R is exhausted for the
current s*/
R.close();
s:=S.Getnext();
IF( s= Not found) RETURN Not Found;
/* both R & S are exhausted*/
R.Close();
r:= R.Getnext();
}
}
until ( r and s join)
RETURN the join of r and s;
}
Close() {
R.close ();
S.close ();
}
99
A BLOCK-BASED NESTED-LOOP JOIN
ALGORITHM
1.
2.
3.
Organizing access to both argument relations by blocks.
Using as much main memory as we can to store tuples belonging to the relation S, the
relation of the outer loop.
Algorithm
FOR each chunk of M-1 blocks of S DO BEGIN
read these blocks into main-memory buffers;
organize their tuples into a search structure whose
search key is the common attributes of R and S;
FOR each block b of R DO BEGIN
read b into main memory;
FOR each tuple t of b DO BEGIN
find the tuples of S in main memory that
join with t ;
output the join of t with each of these tuples;
END ;
END ;
END ;
100
ANALYSIS OF NESTED-LOOP JOIN
Assuming S is the smaller relation, the number
of chunks or iterations of outer loop is B(S)/(M 1). At each iteration, we read hf - 1 blocks of S
and B(R) blocks of R. The number of disk I/O's is
thus
B(S)/M-1(M-1+B(R)) or
B(S)+B(S)B(R)/M-1
Assuming all of M, B(S), and B(R) are large, but
M is the smallest of these, an approximation to
the above formula is B(S)B(R)/M. That is, cost is
proportional to the product of the sizes of the two
relations, divided by the amount of available
main memory.
101
EXAMPLE
B(R) = 1000, B(S) = 500, M = 101
Important Aside: 101 buffer blocks is not as unrealistic
as it sounds. There may be many queries at the same
time, competing for main memory buffers.
Outer loop iterates 5 times
At each iteration we read M-1 (i.e. 100) blocks of S and all
of R (i.e. 1000) blocks.
Total time: 5*(100 + 1000) = 5500 I/O’s
Question: What if we reversed the roles of R and S?
We would iterate 10 times, and in each we would read
100+500 blocks, for a total of 6000 I/O’s.
Compare with one-pass join, if it could be done!
We would need 1500 disk I/O’s if B(S) M-1
102
CONTINUED………
1.
2.
The cost of the nested-loop join is not much
greater than the cost of a one-pass join, which
is 1500 disk 110's for this example. In fact.if
B(S) 5 lZI - 1, the nested-loop join becomes
identical to the one-pass join algorithm of
Section 15.2.3
Nested-loop join is generally not the most
efficient join algorithm.
103
15.4 TWO-PASS ALGORITHMS BASED ON SORTING
INTRODUCTION
In
two-pass algorithms, data from the
operand relations is read into main
memory, processed in some way, written
out to disk again, and then reread from
disk to complete the operation.
In this section, we consider sorting as
tool from implementing relational
operations. The basic idea is as follows if
we have large relation R, where B(R) is
larger than M, the number of memory
buffers we have available, then we can
104
1.
2.
3.
Read M blocks of R in to main memory
Sort these M blocks in main memory, using
efficient, main memory algorithm.
Write sorted list into M blocks of disk, refer
this contents of the blocks as one of the
sorted sub list of R.
105
DUPLICATE ELIMINATION USING SORTING
To
perform δ(R)
operation in two
passes, we sort
tuples of R in
sublists. Then we
use available
memory to hold one
block from each
stored sublists and
then repeatedly copy
one to the output
and ignore all tuples
identical to it.
106
The
no. of disk I/O’s performed by this
algorithm,
1). B(R) to read each block of R when creating
the stored sublists.
2). B(R) to write each of the stored sublists to
disk.
3). B(R) to read each block from the sublists at
the appropriate time.
So , the total cost of this algorithm is 3B(R).
107
GROUPING AND AGGREGATION USING SORTING
Reads the tuples of R into memory, M blocks at a time.
Sort each M blocks, using the grouping attributes of L
as the sort key. Write each sorted sublists on disk.
Use one main memory buffer for each sublist, and
initially load the first block of each sublists into its
buffer.
Repeatedly find least value of the sort key present
among the first available tuples in the buffers.
As for the δ algorithm, this two phase algorithm for γ
takes 3B(R) disk I/O’s and will work as long as B(R) <=
M^2
108
A SORT BASED
UNION ALGORITHM
When bag-union is wanted, one pass algorithm is used
in that we simply copy both relation, works regardless
of the size of arguments, so there is no need to consider
a two pass algorithm for Union bag.
The one pass algorithm for Us only works when at least
one relation is smaller than the available main memory.
So we should consider two phase algorithm for set
union. To compute R Us S, we do the following steps,
1. Repeatedly bring M blocks of R into main memory,
sort their tuples and write the resulting sorted sublists
back to disk.
2.Do the same for S, to create sorted sublist for relation
109
S.
3.Use one main memory buffer for each sublist of R
and S. Initialize each with first block from the
corresponding sublist.
4.Repeatedly find the first remaining tuple t among
all buffers. Copy t to the output , and remove
from the buffers all copies of t.
110
A SIMPLE SORT-BASED JOIN ALGORITHM
Given relation R(x,y) and S(y,z) to join, and given M
blocks of main memory for buffers,
1. Sort R, using a two phase, multiway merge sort,
with y as the sort key.
2. Sort S similarly
3. Merge the sorted R and S. Generally we use only
two buffers, one for the current block of R and the
other for current block of S. The following steps
are done repeatedly.
a. Find the least value y of the join attributes Y
that is currently at the front of the blocks for R
and S.
111
b. If y doesn’t appear at the front of the other
relation, then remove the tuples with sort key y.
c. Otherwise identify all the tuples from both
relation having sort key y
d. Output all the tuples that can be formed by
joining tuples from R and S with a common Y
value y.
e. If either relation has no more unconsidered
tuples in main memory reload the buffer for
that relation.
The
simple sort join uses 5(B(R) + B(S)) disk
I/O’s
It requires B(R)<=M^2 and B(S)<=M^2 to
work
112
SUMMARY OF SORT-BASED ALGORITHMS
Main memory and disk I/O requirements for sort based algorithms
113
15.5 TWO-PASS ALGORITHMS
BASED ON HASHING
Hashing is done if the data is too big to
store in main memory buffers.
Hash all the tuples of the argument(s)
using an appropriate hash key.
For all the common operations, there is a
way to select the hash key so all the
tuples that need to be considered together
when we perform the operation have the
same hash value.
This reduces the size of the operand(s) by
a factor equal to the number of buckets.
114
PARTITIONING RELATIONS BY
HASHING
Algorithm:
initialize M-1 buckets using M-1 empty buffers;
FOR each block b of relation R DO BEGIN
read block b into the Mth buffer;
FOR each tuple t in b DO BEGIN
IF the buffer for bucket h(t) has no room for t THEN
BEGIN
copy the buffer t o disk;
initialize a new empty block in that buffer;
END;
copy t to the buffer for bucket h(t);
END ;
END ;
FOR each bucket DO
IF the buffer for this bucket is not empty THEN
write the buffer to disk;
115
DUPLICATE ELIMINATION
For
the operation δ(R) hash R to M-1
Buckets.
Note: - That two copies of the same tuple t will hash to the
same bucket
Do
duplicate elimination on each bucket Ri
independently, using one-pass algorithm
The
result is the union of δ(Ri), where Ri is
the portion of R that hashes to the ith bucket
116
REQUIREMENTS
Number
of disk I/O's: 3*B(R)
B(R) < M(M-1), only then the two-pass, hash-based
algorithm will work
In
order for this to work, we need:
hash function h evenly distributes the tuples among
the buckets
each bucket Ri fits in main memory (to allow the onepass algorithm)
i.e., B(R) ≤ M2
117
UNION, INTERSECTION, AND
DIFFERENCE
For
binary operation we use the same
hash function to hash tuples of both
arguments.
R U S we hash both R and S to M-1
R ∩ S we hash both R and S to 2(M-1)
R-S we hash both R and S to 2(M-1)
Requires 3(B(R)+B(S)) disk I/O’s.
Two pass hash based algorithm requires
min(B(R)+B(S))≤ M2
118
HASH-JOIN ALGORITHM
Use
same hash function for both
relations; hash function should depend
only on the join attributes
Hash R to M-1 buckets R1, R2, …, RM-1
Hash S to M-1 buckets S1, S2, …, SM-1
Do one-pass join of Ri and Si, for all i
3*(B(R) + B(S)) disk I/O's; min(B(R),B(S)) ≤
M2
119
SORT BASED VS HASH BASED
For Binary operations, hash-based only limits
size to min of arguments, not sum
Sort-based can produce output in sorted order,
which can be helpful
Hash-based depends on buckets being of equal
size
Sort-based algorithms can experience reduced
rotational latency or seek time
120
15.6 INDEX-BASED ALGORITHMS
Clustering
and Non-Clustering Indexes
Clustered Relation: Tuples are packed into
roughly as few blocks as can possibly hold
those tuples
Clustering indexes: Indexes on attributes that
all the tuples with a fixed value for the search
key of this index appear on roughly as few
blocks as can hold them
A
relation that isn’t clustered cannot have
a clustering index
A clustered relation can have Nonclustering indexes
121
INDEX-BASED SELECTION
For a selection σC(R), suppose C is of the form
a=v, where a is an attribute
For clustering index R.a:
The number of disk I/O’s will be
B(R)/V(R,a)
Index is not kept entirely in main memory
They spread over more blocks
May not be packed as tightly as possible into
blocks
122
EXAMPLE
B(R)=1000, T(R)=20,000 number of I/O’s
required:
clustered, not index
1000
not clustered, not index
20,000
If V(R,a)=100, index is clustering
10
If V(R,a)=10, index is nonclustering
2,000
123
JOINING BY USING AN INDEX
Natural join R(X, Y) S S(Y, Z)
Number of I/O’s to get R
Clustered: B(R)
Not clustered: T(R)
Number of I/O’s to get tuple t of S
Clustered: T(R)B(S)/V(S,Y)
Not clustered: T(R)T(S)/V(S,Y)
124
EXAMPLE
R(X,Y):
1000 blocks S(Y,Z)=500 blocks
Assume 10 tuples in each block,
so T(R)=10,000 and T(S)=5000
V(S,Y)=100
If R is clustered, and there is a clustering
index on Y for S
the number of I/O’s for R is:
1000
the number of I/O’s for S
is10,000*500/100=50,000
125
JOINS USING A SORTED INDEX
Natural join R(X, Y) S (Y, Z) with index on Y for
either R or S
Extreme case: Zig-zag join
Example:
relation R(X,Y) and R(Y,Z) with index on Y for
both relations
search keys (Y-value) for R: 1,3,4,4,5,6
search keys (Y-value) for S: 2,2,4,6,7,8
126
15.7 BUFFER MANAGEMENT
Buffer Manager manages the required memory for the
Read/Write
process with minimum delay.
Buffers
Request
Buffer
Manager
127
BUFFER MANAGEMENT
ARCHITECTURE
Two types of architecture:
Buffer Manager controls main memory directly
Buffer Manager allocates buffer in Virtual Memory
In Each method, the Buffer Manager should limit the
number of buffers in use which fit in the available main
memory.
When Buffer Manager controls the main memory directly,
it selects the buffer to empty by returning its content to
disk. If it fails, it may simply be erased from main memory.
If all the buffers are really in use then very little useful
works gets done.
128
BUFFER MANAGEMENT STRATEGIES
LRU (Least Recent Used)
It makes buffer free from the block that has not been read or write for the longest
time.
FIFO (First In First Out)
It makes buffer free that has been occupied the longest and assigned to
new request.
The “Clock” Algorithm
0
1
1
0
0
1
129
THE RELATIONSHIP BETWEEN PHYSICAL
OPERATOR
SELECTION AND BUFFER MANAGEMENT
The query optimizer will eventually select a set of
physical operators that will be used to execute a
given query.
the buffer manager may not be able to guarantee
the availability of the buffers when the query is
executed.
130
CHAPTER 16
QUERY COMPILER
16.1 Parsing
16.2Algebraic Laws for Improving Query Plans
16.3 From Parse Trees to Logical Query Plans
16.4 Estimating the Cost of Operations
16.5 Introduction to Cost-Based Plan Selection
16.6 Choosing an Order for Joins
16.7 Completing the Physical-Query-Plan.
131
16.1 PARSING
Query compilation is divided into three steps
1. Parsing: Parse SQL query into parser tree.
2. Logical query plan: Transforms parse tree into
expression tree of relational algebra.
3.Physical query plan: Transforms logical query plan
into physical query plan.
Operation performed
Order of operation
Algorithm used
The way in which stored data is obtained and passed from
one
operation to another.
132
Parser
Preprocessor
Logical Query plan
generator
Query rewrite
Preferred logical
query plan
133
SYNTAX ANALYSIS AND PARSE TREE
Parser takes the sql query and convert it to
parse tree.
Nodes of parse tree:
#Atoms: known as Lexical elements such as key words,
constants, parentheses, operators, and other schema elements.
#Syntactic categories: Subparts that plays a
134
SIMPLE GRAMMAR
<Query> ::= <SFW>
<Query> ::= (<Query>)
<SFW> ::= SELECT <SelList> FROM <FromList> WHERE <Condition>
<SelList> ::= <Attribute>,<SelList>
<SelList> ::= <Attribute>
<FromList> ::= <Relation>, <FromList>
<FromList> ::= <Relation>
<Condition> ::= <Condition> AND <Condition>
<Condition> ::= <Tuple> IN <Query>
<Condition> ::= <Attribute> = <Attribute>
<Condition> ::= <Attribute> LIKE <Pattern>
<Tuple> ::= <Attribute>
Atoms(constants), <syntactic categories>(variable),
::= (can be expressed/defined as)
135
QUERY AND PARSE TREE
StarsIn(title,year,starName)
MovieStar(name,address,gender,birthdate)
Query:
Give titles of movies that have at least one star
born in 1960
SELECT title FROM StarsIn WHERE starName IN
(
SELECT name FROM MovieStar WHERE birthdate
LIKE '%1960%'
);
SELECT title
FROM StarsIn, MovieStar
WHERE starName = name AND birthdate LIKE '%1960%'
;
136
137
PARSE TREE
138
PREPROCESSOR
Functions of Preprocessor
. If a relation used in the query is virtual view then each use
of this relation in the form-list must replace by parser tree
that describe the view.
. It is also responsible for semantic checking
1. Checks relation uses : Every relation mentioned in
FROMclause must be a relation or a view in current schema.
2. Check and resolve attribute uses: Every attribute
mentioned
in SELECT or WHERE clause must be an attribute of
same
relation in the current scope.
3. Check types: All attributes must be of a type
appropriate to
their uses.
139
PREPROCESSING QUERIES INVOLVING
VIEWS
When an operand in a query is a virtual view, the
preprocessor needs to replace the operand by a piece
of parse tree that represents how the view is
constructed from base table.
Base Table: Movies( title, year, length, genre,
studioname,
producerC#)
View definition : CREATE VIEW ParamountMovies
AS
SELECT title, year FROM movies
WHERE studioName =
'Paramount';
Example based on view:
SELECT title FROM ParamountMovies WHERE year
= 1979;
140
16.2 ALGEBRAIC LAWS FOR IMPROVING
QUERY PLANS
Optimizing the Logical Query Plan
The translation rules converting a parse
tree to a logical query tree do not always
produce the best logical query tree.
It is often possible to optimize the logical
query tree by applying relational algebra
laws to convert the original tree into a
more efficient logical query tree.
Optimizing a logical query tree using
relational algebra laws is called heuristic
optimization
141
RELATIONAL ALGEBRA LAWS
These laws often involve the properties of:
Commutativity - operator can be applied to
operands independent of order.
E.g. A + B = B + A - The “+” operator
is commutative.
Associativity - operator is independent of operand
grouping.
E.g.
A + (B + C) = (A + B) + C - The
“+” operator is associative.
142
ASSOCIATIVE AND COMMUTATIVE
OPERATORS
The relational algebra operators of cross-product
(×), join (⋈), union, and intersection are all
associative and commutative.
Commutative
Associative
R X S=S X R
(R X S) X T = S X (R X T)
R⋈S=S⋈R
(R ⋈ S) ⋈ T= S ⋈ (R ⋈ T)
RS=SR
(R S) T = S (R T)
R ∩S =S∩ R
(R ∩ S) ∩ T = S ∩ (R ∩ T)
143
LAWS INVOLVING SELECTION
Complex selections involving AND or OR can be
broken into two or more selections: (splitting
laws)
σC1 AND C2 (R) = σC1( σC2 (R))
σC1 OR C2 (R) = ( σC1 (R) ) S ( σC2 (R) )
Example
R={a,a,b,b,b,c}
p1 satisfied by a,b, p2 satisfied by b,c
σp1vp2 (R) = {a,a,b,b,b,c}
σp1(R) = {a,a,b,b,b}
σp2(R) = {b,b,b,c}
σp1 (R) U σp2 (R) = {a,a,b,b,b,c}
144
CONTINUED………………….
Selection is pushed through both arguments for union:
σC(R S) = σC(R) σC(S)
Selection is pushed to the first argument and optionally the
second for difference:
σC(R - S) = σC(R) - S
σC(R - S) = σC(R) - σC(S)
All other operators require selection to be pushed to only one of
the arguments.
For joins, may not be able to push selection to both if argument
does not have attributes selection requires.
σC(R × S) = σC(R) × S
σC(R ∩ S) = σC(R) ∩ S
σC(R ⋈ S) = σC(R) ⋈ S
σC(R ⋈D S) = σC(R) ⋈D S
145
LAWS INVOLVING PROJECTION
It is also possible to push projections down the logical query tree.
However, the performance gained is less than selections because
projections just reduce the number of attributes instead of
reducing the number of tuples.
Laws for pushing projections with joins:
πL(R × S) = πL(πM(R) × πN(S))
πL(R ⋈ S) = πL((πM(R) ⋈ πN(S))
πL(R ⋈D S) = πL((πM(R) ⋈D πN(S))
Laws for pushing projections with set operations.
Projection can be performed entirely before union.
πL(R UB S) = πL(R) UB πL(S)
Projection can be pushed below selection as long as we also keep
all attributes needed for the selection
(M = L attr(C)).
πL ( σC (R)) = πL( σC (πM(R)))
146
LAWS INVOLVING JOIN
1.
2.
3.
Joins are commutative and associative.
Selection can be distributed into joins.
Projection can be distributed into joins
147
LAWS INVOLVING DUPLICATE
ELIMINATION
The duplicate elimination operator (δ) can be pushed
through many operators.R has two copies of tuples t, S has
one copy of t,
δ (RUS)=one copy of t
δ (R) U δ (S)=two copies of t
Laws for pushing duplicate elimination operator (δ):
δ(R × S) = δ(R) × δ(S)
δ(R
S) = δ(R)
δ(S)
δ(R D S) = δ(R)
D δ(S)
δ( σC(R) = σC(δ(R))
The duplicate elimination operator (δ) can also be pushed
through bag intersection, but not across union, difference,
or projection in general.
δ(R ∩ S) = δ(R) ∩ δ(S)
148
LAWS INVOLVING GROUPING
The
grouping operator (γ) laws depend on
the aggregate operators used.
There
is one general rule, however, that
grouping subsumes duplicate elimination:
δ(γL(R)) = γL(R)
The
reason is that some aggregate functions
are unaffected by duplicates (MIN and
MAX) while other functions are (SUM,
COUNT, and AVG).
149
16.3 FROM PARSE TREES TO LOGICAL
QUERY PLANS
Parsing
Goal is to convert a text string containing a query
into a parse tree data structure:
Leaves form the text string (broken into lexical elements)
Internal nodes are syntactic categories
Uses standard algorithmic techniques from compilers
Given a grammar for the language (e.g., SQL), process the
string and build the tree
150
CONVERT PARSE TREE TO RELATIONAL
ALGEBRA
The
complete algorithm depends on
specific grammar, which determines forms
of the parse trees
Here is a flavor of the approach
Suppose there are no subqueries.
SELECT att-list FROM rel-list WHERE cond
is converted into
PROJatt-list(SELECTcond (PRODUCT (rellist))),
or
att-list(cond( X (rel-list)))
151
SELECT MOVIETITLE
FROM STARSIN, MOVIESTAR
WHERE STARNAME = NAME AND BIRTHDATE LIKE '%1960';
<Query>
<SFW>
SELECT <SelList> FROM <FromList>
<Attribute>
movieTitle
WHERE
<Condition>
<RelName> , <FromList>
StarsIn
<RelName>
AND <Condition>
<Attribute> LIKE <Pattern>
MovieStar
birthdate
'%1960'
<Condition>
<Attribute> = <Attribute>
152
starName
name
EQUIVALENT ALGEBRAIC EXPRESSION
TREE
movieTitle
starname = name AND birthdate LIKE '%1960'
X
StarsIn
MovieStar
153
Query:
‘%1960’
SELECT title
FROM StarsIn
WHERE starName IN (
SELECT name
FROM MovieStar
WHERE birthdate LIKE
);
Use an intermediate format called twoargument selection
154
EXAMPLE: TWO-ARGUMENT
SELECTION
title
StarsIn
<condition>
<tuple>
<attribute>
starName
IN
name
birthdate LIKE ‘%1960’
MovieStar
155
CONVERTING TWO-ARGUMENT
SELECTION
To continue the conversion, we need rules for
replacing two-argument selection with a
relational algebra expression
Different rules depending on the nature of the
sub query
Here is shown an example for IN operator and
uncorrelated query (sub query computes a
relation independent of the tuple being tested)
156
IMPROVING THE LOGICAL QUERY
PLAN
There are numerous algebraic laws concerning
relational algebra operations
By applying them to a logical query plan
judiciously, we can get an equivalent query plan
that can be executed more efficiently
157
EXAMPLE: IMPROVED LOGICAL QUERY
PLAN
title
starName=name
StarsIn
name
birthdate LIKE ‘%1960’
MovieStar
158
Associative and
Commutative Operations
•
•
•
•
Product
Natural join
Set and Bag union
Set and Bag intersection
Associative: (A op B) op C = A op (B op C)
Commutative: A op B = B op A
159
Laws Involving Selection
• Selections usually reduce the size of the relation
• Usually good to do selections early, i.e., "push them down the tree"
• Also can be helpful to break up a complex selection into parts
Selection Splitting
C1 AND C2 (R) = C1 ( C2 (R))
C1 OR C2 (R) = ( C1 (R)) Uset ( C2 (R))
if R is a set
C1 ( C2 (R)) = C2 ( C1 (R))
160
Selection and Binary Operators
• Must push selection to both arguments:
– C (R U S) = C (R) U C (S)
• Must push to first arg, optional for 2nd:
– C (R - S) = C (R) - S
– C (R - S) = C (R) - C (S)
• Push to at least one arg with all attributes
mentioned in C:
– product, natural join, theta join, intersection
– e.g., C (R X S) = C (R) X S, if R has all the atts in C
161
Pushing Selection Up the
Tree
• Suppose we have relations
– StarsIn(title,year,starName)
– Movie(title,year,len,inColor,studioName)
• and a view
– CREATE VIEW MoviesOf1996 AS
SELECT *
FROM Movie
WHERE year = 1996;
• and the query
– SELECT starName, studioName
FROM MoviesOf1996 NATURAL JOIN StarsIn;
162
The Straightforward Tree
starName,studioName
year=1996
Movie
StarsIn
Remember the rule
C(R S) = C(R)
S?
163
The Improved Logical Query
Plan
starName,studioName
starName,studioName
starName,studioName
year=1996
year=1996
StarsIn
year=1996 year=1996
Movie
Movie
push selection
up tree
StarsIn
Movie
push selection
down tree
StarsIn
164
Grouping Assoc/Comm
Operators
• Groups together adjacent joins, adjacent unions, and
adjacent intersections as siblings in the tree
• Sets up the logical QP for future optimization when
physical QP is constructed: determine best order for
doing a sequence of joins (or unions or intersections)
U
D
U
A
E
U
F
A
B
D
E
F
C
165
B
C
16.4 ESTIMATING THE COST OF
OPERATIONS
Physical
Plan
An order and grouping for associative-andcommutative operations like joins, unions.
An Algorithm for each operator in the logical plan.
whether nested loop join or hash join to be used
Additional operators that are needed for the
physical plan but that were not present explicitly
in the logical plan. eg: scanning, sorting
The way in which arguments are passed from one
operator to the next.
166
ESTIMATING SIZES OF INTERMEDIATE
RELATIONS
Rules for estimating the number of tuples in an
intermediate relation:
Give accurate estimates
2. Are easy to compute
3. Are logically consistent
Objective of estimation is to select best physical plan with
least cost.
1.
Estimating the Size of a Projection
The projection is different from the other operators, in that the size of the
result is computable. Since a projection produces a result tuple for every
argument tuple, the only change in the output size is the change in the lengths
of the tuples
167
ESTIMATING THE SIZE OF A SELECTION(1) &
SELECTION(2)
Let S A c ( R ), where A is an attribute of R and C
is a constant. Then we recommend as an estimate:
T(S) =T(R)/V(R,A)
The rule above surely holds if all values of attribute A
occur equally often in the database.
If S a c (R )
,then our estimate for
T(s) is: T(S) = T(R)/3
We may use T(S)=T(R)(V(R,a) -1 )/ V(R,a) as an
estimate.
When the selection condition C is the And of several
equalities and inequalities, we can treat the selection
as a cascade of simple selections, each of which checks
for one of the conditions.
168
ESTIMATING THE SIZE OF A
SELECTION(3)
A less simple, but possibly more accurate estimate
of the size S
of c1 OR c2(R)
is to assume that
2
C1 and
of which satisfy C2, we would estimate
the number of tuples in S as
m
n(1 (1 m1 / n)(1 m2 / n))
In explanation,1 m1 / n
is the fraction of tuples
that do not satisfy C1, and1 m / n is the
2
fraction that do not satisfy C2. The product of
these numbers is the fraction of R’s tuples that are
not in S, and 1 minus this product is the fraction
that are in S.
169
ESTIMATING THE SIZE OF A JOIN
Two
simplifying assumptions:
1. Containment of Value Sets
If R and S are two relations with attribute Y and V(R,Y)<=V(S,Y) then
every Y-value of R will be a Y-value of S.
2. Preservation of Value Sets
Join a relation R with another relation S with attribute A in R and not in
S then all distinct values of A are preserved and not lost.V(S
R,A) =
V(R,A)
Under these assumptions, we estimate
T(R S) = T(R)T(S)/max(V(R,Y), V(S, Y))
170
NATURAL JOINS WITH MULTIPLE JOIN
ATTRIBUTES
Of the T(R),T(S) pairs of tuples from R and S, the
expected number of pairs that match in both y1 and
y2 is:
T(R)T(S)/max(V(R,y1), V(S,y1)) max(V(R, y2), V(S,
y2))
In general, the following rule can be used to
estimate the size of a natural join when there are
any number of attributes shared between the two
relations.
The estimate of the size of R
S is computed by
multiplying T(R) by T(S) and dividing by the largest
of V(R,y) and V(S,y) for each attribute y that is
common to R and S.
171
JOINS OF MANY RELATIONS(1) & (2)
Rule for estimating the size of any join
Start with the product of the number of tuples in each
relation. Then, for each attribute A appearing at least twice,
divide by all but the least of V(R,A)’s.
We can estimate the number of values that will remain for
attribute A after the join. By the preservation-of-value-sets
assumption, it is the least of these V(R,A)’s.
Based on the two assumptions-containment and preservation of
value sets:
No matter how we group and order the terms in a natural
join of n relations, the estimation of rules, applied to each
join individually, yield the same estimate for the size of the
result. Moreover, this estimate is the same that we get if we
apply the rule for the join of all n relations as a whole.
172
ESTIMATING SIZES FOR OTHER
OPERATIONS
Union: the average of the sum and the larger.
Intersection:
approach1: take the average of the extremes, which is the half the smaller.
approach2: intersection is an extreme case of the natural join, use the
formula
T(R S) = T(R)T(S)/max(V(R,Y), V(S, Y))
•
Difference: T(R)-(1/2)*T(S)
•
Duplicate Elimination: take the smaller of (1/2)*T(R) and the product of all
the V(R, )’s.
•
Grouping and Aggregation: upper-bound the number of groups by a
product of V(R,A)’s, here attribute A ranges over only the grouping
attributes of L. An estimate is the smaller of (1/2)*T(R) and this product.
173
16.5 INTRODUCTION TO COSTBASED PLAN SELECTION
The "cost" of evaluating an expression is approximated well
by the number of disk I/O's performed.
The number of disk I/O’s, in turn, is influenced by:
1. The particular logical operators chosen to implement the
query, a matter decided when we choose the logical query
plan.
2. The sizes of intermediate results (whose estimation we
discussed in Section 16.4)
3. The physical operators used to implement logical operators.
e.g.. The choice of a one-pass or two-pass join, or the choice
to sort or not sort a given relation.
4. The ordering of similar operations, especially joins
5. The method of passing arguments from one physical
operator to the next.
174
Whether selecting a logical query plan or
constructing a physical query plan from a logical
plan, the query optimizer needs to estimate the
cost of evaluating certain expressions.
We shall assume that the "cost" of evaluating an
expression is approximated well by the number of
disk I/O's performed.
175
ESTIMATES FOR SIZE PARAMETER
The formulas of Section 16.4 were predicated on
knowing certain important parameters,
especially T(R), the number of tuples in a relation R, and V(R,
a), the number of different values in the column of relation R
for attribute a.
A modern DBMS generally allows the user or
administrator explicitly to request the gathering of
statistics,
such as T(R) and V(R, a). These statistics are then used in
subsequent query optimizations to estimate the cost of
operations.
By scanning an entire relation R, it is straightforward to count
the number of tuples T(R) and also to discover the number of
different values V(R, a) for each attribute a.
The number of blocks in which R can fit, B(R), can be
estimated either by counting the actual number of blocks used
(if R is clustered), or by dividing T(R) by the number of tuples
per block
176
COMPUTATION OF STATISTICS
Periodic re-computation of statistics is the norm in most
DBMS's, for several reasons.
First, statistics tend not to change radically in a short time.
Second, even somewhat inaccurate statistics are useful as long as they
are applied consistently to all the plans.
Third, the alternative of keeping statistics up-to-date can make the
statistics themselves into a "hot-spot" in the database; because
statistics are read frequently, we prefer not to update them frequently
too.
The recomputation of statistics might be triggered automatically after
some period of time, or after some number of updates.
However, a database administrator noticing, that poor-performing
query plans are being selected by the query optimizer on a regular
basis, might request the recomputation of statistics in an attempt to
rectify the problem.
Computing statistics for an entire relation R can be very expensive,
particularly if we compute V(R, a) for each attribute a in the relation.
One common approach is to compute approximate statistics by
sampling only a fraction of the data. For example, let us suppose we
want to sample a small fraction of the tuples to obtain an estimate for
V(R, a).
177
HEURISTICS FOR REDUCING THE COST
OF LOGICAL QUERY PLANS
One important use of cost estimates for queries or sub-queries is
in the application of heuristic transformations of the query.
We have already observed previously how certain heuristics
applied independent of cost estimates can be expected almost
certainly to improve the cost of a logical query plan.
However, there are other points in the query optimization process
where estimating the cost both before and after a transformation
will allow us to apply a transformation where it appears to reduce
cost and avoid the transformation otherwise.
In particular, when the preferred logical query plan is being
generated, we may consider a number of optional transformations
and the costs before and after.
Because we are estimating the cost of a logical query plan, so we
have not yet made decisions about the physical operators that will
be used to implement the operators of relational algebra, our cost
estimate cannot be based on disk I/Os.
Rather, we estimate the sizes of all intermediate results using the
techniques of Section 16.1, and their sum is our heuristic estimate
for the cost of the entire logical plan.
178
EXAMPLE ILLUSTRATE THIS
Consider the initial logical query plan of as
shown below,
•
•
The statistics for the relations R and S be as
follows
To generate a final logical query plan from, we
shall insist that the selection be pushed down as
far as possible. However, we are not sure
whether it makes sense to push the δ below the
join or not. Thus, we generate from the two query
plans shown in next slide. They differ in whether
179
we have chosen to eliminate duplicates before or
after the join.
500
δ
250
50
δ
100 σa = 10
5000 R
(a)
δ
S
2000
1000
1000
0
100 σa = 10
5000 R
S
2000
(b)
• We know how to estimate the size of the result of the
selections, we divide T(R) by V(R, a) = 50.
• We also know how to estimate the size of the joins; we
multiply the sizes of the arguments and divide by
max(V(R, b), V(S, b)), which is 200.
180
APPROACHES TO ENUMERATING
PHYSICAL PLANS
Let us consider the use of cost estimates in the conversion
of a logical query plan to a physical query plan.
The baseline approach, called exhaustive, is to consider all
combinations of choices (for each of issues like order of
joins, physical implementation of operators, and so on).
Each possible physical plan is assigned an estimated cost,
and the one with the smallest cost is selected.
There are two broad approaches to exploring the space of
possible physical plans:
Top-down: Here, we work down the tree of the logical query
plan from the root.
Bottom-up: For each sub-expression of the logical-query-plan
tree, we compute the costs of all possible ways to compute that
sub-expression. The possibilities and costs for a subexpression E are computed by considering the options for the
sub-expressions for E, and combining them in all possible
ways with implementations for the root operator of E.
181
BRANCH-AND-BOUND PLAN
ENUMERATION
This approach, often used in practice, begins by
using heuristics to find a good physical plan for
the entire logical query plan. Let the cost of this
plan be C. Then as we consider other plans for
sub-queries, we can eliminate any plan for a subquery that has a cost greater than C, since that
plan for the sub-query could not possibly
participate in a plan for the complete query that
is better than what we already know.
Likewise, if we construct a plan for the complete
query that has cost less than C, we replace C by
the cost of this better plan in subsequent
exploration of the space of physical query plans.
182
HILL CLIMBING & DYNAMIC
PROGRAMMING
Hill Climbing
This approach, in which we really search for a “valley” in the
space of physical plans and their costs; starts with a
heuristically selected physical plan.
We can then make small changes to the plan, e.g., replacing
one method for an operator by another, or reordering joins by
using the associative and/or commutative laws, to find
"nearby" plans that have lower cost.
When we find a plan such that no small modification yields a
plan of lower cost, we make that plan our chosen physical
query plan.
Dynamic Programming
In this variation of the general bottom-UP strategy, we keep
for each sub-expression only the plan of least cost.
As we work UP the tree, we consider possible implementations
of each node, assuming the best plan for each sub-expression
is also used
183
16.6 Choosing an order for Joins
• The argument relations in joins determine the cost of the join
• The left argument of the join is
– Called the build relation
– Assumed to be smaller
– Stored in main-memory
• The right argument of the join is
– Called the probe relation
– Read a block at a time
– Its tuples are matched with those of build relation
• The join algorithms which distinguish between the arguments are:
– One-pass join
– Nested-loop join
– Index join
184
Join Trees
•
•
•
•
Order of arguments is important for joining two relations
Left argument, since stored in main-memory, should be smaller
With two relations only two choices of join tree
With more than two relations, there are n! ways to order the
arguments and therefore n! join trees, where n is the no. of relations
185
Database System The Complete Book Chapter 16 Figure: 16.27
Join Trees Types
• In fig (a) Left-deep tree
– all the right children are leaves.
• In fig (c) Right-deep tree
– all the left children are leaves.
• Fig (b) Bushy tree
– Considering left-deep trees is advantageous for deciding join orders
• Dynamic Programming to Select a Join Order and Grouping. We
have three choices
• Consider them all
• Consider a subset
• Use a heuristic to pick one
186
Dynamic Programming to Select
a Join Order and Grouping
Dynamic programming is used either to consider all
or a subset
Construct a table of costs based on relation size
Remember only the minimum entry which will required to
proceed
Disadvantage of dynamic programming is that it
does not involve the actual costs of the joins in the
calculations
Can be improved by considering
Use disk’s I/O for evaluating cost
When computing cost of R1 join R2, since we sum cost of R1
187
and R2, we must also compute estimates for there sizes
A Greedy Algorithm for Selecting a Join Order
It is expensive to use an exhaustive method like
dynamic programming
Better approach is to use a join-order heuristic for
the query optimization
Greedy algorithm is an example of that
Make one decision at a time and never backtrack on the
decisions once made
188
16.7COMPLETING THE PHYSICALQUERY-PLAN
Issues Regarding Physical Query Plan
Decisions regarding when intermediate results
will be materialized and when they will be
pipelined.
Selection of algorithms to implement the
operations of the query plan, when algorithmselection was not done as part of some earlier
step such as selection of a join order by dynamic
programming.
Notation for physical-query-plan operators,
which must include details regarding access
methods for stored relations and algorithms for
implementation of relational-algebra operators.
189
CHOOSING A SELECTION METHOD
To
pick algorithms for each selection operator.
Assuming there are no multidimensional indexes
on several of the attributes, then each physical
plan uses some number of attributes that each:
Have an index.
Are compared to a constant in one of the terms of the
selection.
We
then use these indexes to identify the sets of
tuples that satisfy each of the conditions.
190
CONTINUED..
We
discuss physical plans that:
Use one comparison of the form AѲc, where A is an
attribute with an index, c is a constant, and Ѳ is a
comparison operator such as = or <.
Retrieve all tuples that satisfy the above
comparison, using the index scan physical operator.
Consider each tuple selected above to decide
whether it satisfies the rest of the selection
condition.
We
decide among the physical plans with which
to implement a given election by estimating the
cost of reading data for each possible option.
We shall count only the cost of accessing the
data blocks, not the index blocks.
191
JOIN METHOD
One approach is to call for the one-pass join, hoping that the buffer
manager can devote enough buffers to the join, or that the buffer
manager can come close, so thrashing is not a major cost.
An alternative is to choose a nested-loop join, hoping that if the left
argument cannot be granted enough buffers to fit in memory at once,
then that argument will not have to be divided into too many pieces,
and the resulting join will still be reasonably efficient.
A sort- join is good choice when either:
One or both arguments are already sorted on their join attributes
Or there are two or more joins on the same attribute, such as
(R(a. b) w S(%c) ) w T(a,d )
When sorting R and S on a will cause the result of R w S to be
sorted on a and used directly in a second sort-join
192
PIPELINING VS. MATERIALIZATION
The naïve way to execute a query plan is to order the
operations appropriately and store the results of each
operation on disk until it is needed by another operation.
This strategy is called materialization.
More subtle way to execute a query plan is to interleave the
execution of several operations. The tuples produced by one
operation are passed directly to the operation that uses it,
without ever storing the intermediate tuples on disk. This
approach in called pipelining.
Since pipelining saves disk I/O’s, where is an obvious
advantage to pipelining, but there is a corresponding
disadvantage. Since several operations must share main
memory at any time, there is a chance that algorithm with
higher disk I/O requirements must be chosen or thrashing
will occur , thus giving back all the disk-I/O savings that
were gained by pipelining.
193
PIPELINING UNARY OPERATIONS
Selection and projection are excellent candidates for
pipelining. Since these operations are tuple-at-a-time,
we never need to have more than one block for input
and one for output.
Figure 1:
194
PIPELINING BINARY OPERATIONS
We use one buffer to pass the results to its consumer,
one block at a time.
The number of other buffers need to compute the
results and to consume the results varies, depending
on the size of the result and the sizes of other relations
involved in the query.
195
NOTATIONS FOR PHYSICAL QUERY PLANS
Each operator of the logical plan becomes one or
more operators of the physical plan, and leaves
(stored relations) of the logical plan become, in the
physical plan, one of the scan operators applied to
that relation.
Materialization would be indicated by a Store
operator applied to the intermediate result that is to
be materialized, followed by a suitable scan operator
when the materialized result is accessed by its
consumer.
We shall indicate that a certain intermediate
relation is materialized by a double line crossing the
edge between that relation and its consumer.
All other edges are assumed to represent pipelining
between the supplier and consumer of tuples.
196
OPERATORS FOR LEAVES
Each relation R that is a leaf operand of the logical-queryplan tree will be replaced by a scan operator.
The options are:
TableScan(R): All blocks holding tuples of R are read in
arbitrary order.
SortScan (R, L): Tuples of R are read in order, sorted according
to the attribube(s) on list L.
IndexScan(R,C): Here, C is a condition of the form AѲc, where
A is an attribute of R,Ѳ is a comparison such as = or <, and c is
a constant. Tuples of R are accessed through an index on
attribute A. If the comparison Ѳ is not =, then the index must
be one, such as a B-tree, that supports range queries.
IndexScan(R,A): Here A is an attribute of R. The entire
relation R is retrieved via an index on R.A. This operator
behaves like TableScan, but may be more efficient in certain
circumstances, if R is not clustered and/or its blocks are not
easily found.
197
PHYSICAL OPERATORS FOR SELECTION
A logical operator σc(R) is often combined, or
partially combined, with the access method for
relation R, when R is a stored relation
Other selections, where the argument is not a stored
relation or an appropriate index is not available, will
be replaced by the corresponding physical operator
we have called Filter.
The notation we shall use for the various selection
implementations are:
We may simply replace σc (R) by the operator Filter(C).
If condition C can be expressed as AѲc AND D for some
other condition D, and there is an index on R.A, then we
may:
Use the operator InterScan(R,Aѳc) to access R, and
Use Filter(D) in place of the selection σc (R).
198
PHYSICAL SORT OPERATORS
Sorting of a relation can occur at any point in the
physical query plan.
When we apply a sort-based algorithm for operations
such as join or grouping, there is an initial phase in
which we sort the argument according to some list of
attributes
It is common to use an explicit physical operator
Sort(L) to perform this sort on an operand relation
that is not stored.
199
OTHER RELATIONAL ALGEBRA OPERATIONS
All
other operations are replaced by a suitable
physical operator.
These operators can be given designations that
indicate:
The operation being performed, e.g., join or
grouping.
Necessary parameters, e.g., the condition in a thetajoin or the list of elements in a grouping.
A general strategy for the algorithm: sort-based,
hash-based, or in some joins, index-based.
The decision about the number of passes to be used:
one-pass, two-pass, or multi-pass
An anticipated number of buffers the operation will
require.
200
ORDERING OF PHYSICAL OPERATIONS
The following rules summarize the ordering of events implicit
in a physical-query-plan tree:
Break the tree into sub-trees at each edge that represents
materialization. The sub-trees will be executed one-at-a-time.
Order the execution of the sub-trees in a bottom-up, left-toright manner. To be precise, perform a preorder traversal of
the entire tree. Order the sub-trees in the order in which the
preorder traversal exits from the sub-trees.
Execute all nodes of each sub-tree using a network of iterators.
Thus, all the nodes in one sub-tree are executed
simultaneously, with GetNext calls among their operators
determining the exact order of events.
Following this strategy, the query optimizer can now generate
executable code, perhaps a sequence of function calls, for the
query.
201
CHAPTER 18
CONCURRENCY CONTROL
18.1Serial and Serializable Schedule
18.2 Conflict- Serializability
18.3 Enforcing Serializability by Locks
18.4 Locking Systems With Several Lock Modes
18.5 An Architecture for a Locking Scheduler
18.6 Managing Hierarchies of Database Elements
18.7 The Tree Protocol
18.8 Concurrency Control by Timestamp
202
18.9 Concurrency Control by Validation
What Is Concurrency Control & Who controls it?
• A process of assuming that the transactions
preserve the consistency when executing
simultaneously is called Concurrency Control.
• This consistency is taken care by Scheduler.
203
18.1Serial and Serializable
Schedule
Read / Write Requests
Buffer
• Correctness Principle
• It’s a principle that states that a transaction starts in a
correct database state and ends in a correct database
state.
204
• Does the system really follow the correctness principal all
the time?
Basic Example Schedule
T1
T2
READ (A,t)
t := t+100
WRITE (A,t)
READ (B,t)
t := t+100
WRITE (B,t)
READ (A,s)
s := s*2
WRITE (A,s)
READ (B,s)
s := s*2
WRITE (B,s)
A=B=50
To be consistent the final state should be A=B
205
Serial Schedule
T1
T2
A
B
50
READ (A,t)
t := t+100
WRITE (A,t)
READ (B,t)
t := t+100
WRITE (B,t)
150
150
READ (A,s)
s := s*2
WRITE (A,s)
READ (B,s)
s := s*2
WRITE (B,s)
300
50
(T1,T2)
A := 2*(A+100)
300
206
Does the order really matter?
T1
T2
A
B
50
READ (A,s)
s := s*2
WRITE (A,s)
READ (B,s)
s := s*2
WRITE (B,s)
100
READ (A,t)
t := t+100
WRITE (A,t)
READ (B,t)
t := t+100
WRITE (B,t)
50
100
200
(T2,T1)
200
207
The final state of a database is not independent of the order of transaction.
Serializable Schedule
T1
T2
A
B
50
READ (A,t)
t := t+100
WRITE (A,t)
50
150
READ (A,s)
s := s*2
WRITE (A,s)
READ (B,t)
t := t+100
WRITE (B,t)
300
150
READ (B,s)
s := s*2
WRITE (B,s)
300
Serializable but not Serial Schedule
208
Non-Serializable Schedule
T1
T2
A
B
50
READ (A,t)
t := t+100
WRITE (A,t)
150
READ (A,s)
s := s*2
WRITE (A,s)
READ (B,s)
s := s*2
WRITE (B,s)
100
READ (B,t)
t := t+100
WRITE (B,t)
50
A := 2*(A+100)
B := 2*B + 100
300
200
209
A Serializable Schedule with
details
T1
T2
A
B
50
READ (A,t)
t := t+100
WRITE (A,t)
150
READ (A,s)
s := s*1
WRITE (A,s)
READ (B,s)
s := s*1
WRITE (B,s)
50
READ (B,t)
t := t+100
WRITE (B,t)
50
A := 1*(A+100)
B := 1*B + 100
150
150
210
Notations for Transaction
1.
Action : An expression of the form ri(X) or wi(X) meaning that
transaction Ti reads or writes, respectively, the database X.
2.
Transaction : A transaction Ti is a sequence of actions with
subscript.
3.
Schedule : A schedule S of a transactions T is a sequence of
actions, in which for each transaction Ti in T, the action of Ti
appear in the definition of Ti itself.
211
Notational Example
T1
T2
READ (A,t)
t := t+100
WRITE (A,t)
READ (B,t)
t := t+100
WRITE (B,t)
READ (A,s)
s := s*2
WRITE (A,s)
READ (B,s)
s := s*2
WRITE (B,s)
Notation:
T1 : r1(A); w1(A); r1(B); w1(B)
T2 : r2(A); w2(A); r2(B); w2(B)
212
CONCURRENCY CONTROL
Concurrency control in database management systems
(DBMS) ensures that database transactions are
performed concurrently without the concurrency
violating the data integrity of a database.
Executed transactions should follow the ACID rules.
The DBMS must guarantee that only serializable
(unless Serializability is intentionally relaxed),
recoverable schedules are generated.
It also guarantees that no effect of committed
transactions is lost, and no effect of aborted (rolled
back) transactions remains in the related database.
213
TRANSACTION ACID RULES
Atomicity - Either the effects of all or none of its operations
remain when a transaction is completed - in other words, to
the outside world the transaction appears to be indivisible,
atomic.
Consistency - Every transaction must leave the database in
consistent state.
Isolation - Transactions cannot interfere with each other.
Providing isolation is the main goal of concurrency control.
Durability - Successful transactions must persist through
crashes
214
SERIAL AND SERIALIZABLE SCHEDULES
In the field of databases, a schedule is a list of actions, (i.e.
reading, writing, aborting, committing), from a set of transactions.
In this example, Schedule D is the set of 3 transactions T1, T2,
T3. The schedule describes the actions of the transactions as seen
by the DBMS. T1 Reads and writes to object X, and then T2 Reads
and writes to object Y, and finally T3 Reads and writes to object Z.
This is an example of a serial schedule, because the actions of the
3 transactions are not interleaved.
215
SERIAL AND SERIALIZABLE SCHEDULES
A schedule that is equivalent to a serial schedule has the
serializability property.
In schedule E, the order in which the actions of the transactions
are executed is not the same as in D, but in the end, E gives the
same result as D.
216
SERIAL SCHEDULE
TI PRECEDES T2
T1
Read(A); A A+100
Write(A);
Read(B); B B+100;
Write(B);
T2
A
25
B
25
125
Read(A);A A2;
Write(A);
Read(B);B B2;
Write(B);
125
250
250
250
250
217
SERIAL SCHEDULE T2 PRECEDES
TL
T1
T2
Read(A);A A2;
Write(A);
Read(B);B B2;
Write(B);
Read(A); A A+100
Write(A);
Read(B); B B+100;
Write(B);
A
25
B
25
50
50
150
150
150
150
218
SERIALIZABLE, BUT NOT SERIAL,
SCHEDULE
T1
Read(A); A A+100
Write(A);
T2
A
25
B
25
Read(A);A A2; 125
Write(A);
Read(B); B B+100;
Write(B);
250
Read(B);B B2;
Write(B);
r1(A); w1 (A): r2(A); w2(A); r1 (B); w1 (B); r2(B); w2(B);
125
250
250
250219
NON SERIALIZABLE SCHEDULE
T1
Read(A); A A+100
Write(A);
T2
Read(A);A A2;
Write(A);
Read(B);B B2;
Write(B);
A
25
B
25
125
250
50
Read(B); B B+100;
Write(B);
250
150
150
220
SCHEDULE THAT IS SERIALIZABLE ONLY BECAUSE OF THE
DETAILED BEHAVIOR OF THE TRANSACTIONS
T1
Read(A); A A+100
Write(A);
T2’
Read(A);A A1;
Write(A);
Read(B);B B1;
Write(B);
A
25
125
125
25
Read(B); B B+100;
Write(B);
regardless of the consistent initial state: the final state will be consistent.
B
25
125
125
125
221
NON-CONFLICTING ACTIONS
Two actions are non-conflicting if whenever they
occur consecutively in a schedule, swapping them
does not affect the final state produced by the
schedule. Otherwise, they are conflicting.
222
18.2 CONFLICT- SERIALIZABILITY
Two actions of the same transaction conflict:
r1(A) w1(B)
Two actions over the same database element
conflict, if one of them is a write
r1(A) w2(A)
w1(A) w2(A)
223
CONFLICT ACTIONS
Two or more actions are said to be in conflict if:
The actions belong to different transactions.
At least one of the actions is a write operation.
The actions access the same object (read or write).
The following set of actions is conflicting:
T1:R(X), T2:W(X), T3:W(X)
While the following sets of actions are not:
T1:R(X), T2:R(X), T3:R(X)
T1:R(X), T2:W(Y), T3:R(X)
224
CONFLICT SERIALIZABLE
We may take any schedule and make as many
non-conflicting swaps as we wish.
With the goal of turning the schedule into a serial
schedule.
If we can do so, then the original schedule is
serializable, because its effect on the database
state remains the same as we perform each of the
nonconflicting
swaps.
225
CONFLICT SERIALIZABLE
A schedule is said to be conflict-serializable when the schedule is conflictequivalent to one or more serial schedules.
Another definition for conflict-serializability is that a schedule is conflictserializable if and only if there exists an acyclic precedence
graph/serializability graph for the schedule.
Which is conflict-equivalent to the serial schedule <T1,T2>, but not
<T2,T1>.
226
CONFLICT EQUIVALENT / CONFLICTSERIALIZABLE
Let Ai and Aj are consecutive non-conflicting
actions that belongs to different transactions.
We can swap Ai and Aj without changing the
result.
Two schedules are conflict equivalent if they can
be turned one into the other by a sequence of
non-conflicting swaps of adjacent actions.
We shall call a schedule conflict-serializable if it
is conflict-equivalent to a serial schedule.
227
CONFLICT-SERIALIZABLE
T1
R(A)
W(A)
T2
R(A)
T1
R(A)
W(A)
R(B)
R(B)
R(A)
W(A)
W(A)
W(B)
T2
W(B)
R(B)
W(B)
R(B)
W(B)
228
CONFLICT-SERIALIZABLE
T1
R(A)
W(A)
R(A)
T2
R(B)
W(B)
W(A)
R(B)
W(B)
T1
R(A)
W(A)
R(A)
W(B)
T2
Serial
Schedule
R(B)
W(A)
R(B)
W(B)
229
18.3 ENFORCING SERIALIZABILITY BY
LOCKS
Enforcing serializability by locks
Locks
Locking scheduler
Two phase locking
230
230
LOCKS
It works like as follows :
A request from a transaction
Scheduler checks in the lock table
Generates a serializable schedule of actions.
231
231
CONSISTENCY OF TRANSACTIONS
Actions
and locks must relate each other
Transactions can only read & write only if has a
lock and has not released the lock.
Unlocking an element is compulsory.
Legality
No two transactions can aquire the lock on same
element without the prior one releasing it.
Locking
of schedules
scheduler
Grants lock requests only if it is in a legal schedule.
Lock table stores the information about current
locks on the elements.
232
232
THE LOCKING SCHEDULER
CONTINUED………………..
A
legal schedule of consistent transactions but
unfortunately it is not a serializable.
233
233
LOCKING SCHEDULE CONTINUED….
The locking scheduler delays requests that would
result in an illegal schedule.
T1
T2
l1 (A); r1 (A)
A: = A + 100;
A
B
125
l2 (A); r2 (A)
A: = A * 2;
w2(A);l2(B)
250
Denied
r1 (B); B := B+100;
w1(B);u2(B);
125
l2 (B); u2 (A); r2
250
(B)
B: = B * 2;
w2(B);u2(B)
234
234
TWO-PHASE LOCKING
Guarantees a legal schedule of consistent transactions
is conflict-serializable.
All lock requests proceed all unlock requests.
The growing phase:
Obtain all the locks and no unlocks allowed.
The shrinking phase:
Release all the locks and no locks allowed.
235
235
HOW THE TWO-PHASE LOCKING WORKS
Assures serializability.
Two protocols for 2PL:
Strict two phase locking : Transaction holds all its
exclusive locks till commit / abort.
Rigorous two phase locking : Transaction holds all
locks till commit / abort.
Possible to find a transaction Tj that has a 2PL and a
schedule S for Ti ( non 2PL ) and Tj that is not conflict
serializable.
236
236
2PL FAILURE……….S
2PL fails to provide security against deadlocks.
T1
T2
l1 (A); r1 (A)
A: = A + 100;
A
B
25
25
l2 (B); r2 (B)
B: = B * 2;
w2(A);l2(B) Denied
w1(A);
125
l1(A) Denied
w1(B);
l2 (B); Denied
50
250
237
237
18.4 LOCKING SYSTEMS WITH SEVERAL
LOCK MODES
Locking Scheme
Shared/Read Lock ( For Reading)
Exclusive/Write Lock( For Writing)
Compatibility Matrices
Upgrading Locks
Update Locks
Increment Locks
238
238
SHARED & EXCLUSIVE LOCKS
Consistency of Transactions
Cannot write without Exclusive Lock
Cannot read without holding some lock
This
basically works on 2 principles
A read action can only proceed a shared or an
exclusive lock
A write lock can only proceed a exclusice lock
All
locks need to be unlocked before commit
239
239
SHARED AND EXCLUSIVE LOCKS
CONTINUED…………………..
Two-phase locking of transactions
Must precede unlocking
Legality of Schedules
An element may be locked exclusively by one
transaction or by several in shared mode, but
not both.
T1
T2
sl1 (A); r1 (A)
A: = A + 100;
sl2 (A); r2 (A)
sl2 (B); r2 (B)
xl1 (B);Denied
u2 (A); u2 (B)
xl1 (B); r1 (B); u1 (B);
u1 (A); u2 (B);
240
240
COMPATIBILITY MATRICES
Has a row and column for each lock mode.
Rows correspond to a lock held on an element by another
transaction
Columns correspond to mode of lock requested.
Example :
LOCK REQUESTED
S
X
LOCK
S
YES
NO
HOLD
X
NO
NO
241
241
UPGRADING LOCKS
Suppose a transaction wants to read as well as write :
It acquires a shared lock on the element
Performs the calculations on the element
And when its ready to write, It is granted a exclusive lock.
Transactions with unpredicted read write locks can
use UPGRADING LOCKS.
242
242
UPGRADING LOCKS [CONTINUED ….]
Indiscriminating use of upgrading produces a
deadlock.
Example : Both the transactions want to upgrade on
the same element
243
243
UPDATE LOCKS
Solves the deadlock occurring in upgrade lock method.
A transaction in an update lock can read but cant
write.
Update lock can later be converted to exclusive lock.
An update lock can only be given if the element has
shared locks.
244
244
UPDATE LOCKS (CONT.)
An update lock is like a shared lock when you are
requesting it and is like a exclusive lock when you
have it.
Compatibility matrix :
S
X
U
S
YES
NO
YES
X
NO
NO
NO
U
NO
NO
NO
245
245
INCREMENT LOCKS
Used for incrementing & decrementing stored values.
E.g. - Transfer money from one bank to another, Ticket
selling transactions in which number seats are
decremented after each transaction.
246
246
INCREMENT LOCK (CONT.)
A
increment lock does not enable read or write
locks on element.
Any number of transaction can hold increment
lock on element
Shared and exclusive locks can not be granted if
an increment lock is granted on element
S
X
I
S
YES
NO
NO
X
NO
NO
NO
I
NO
NO
YES
247
247
18.5 LOCKING SCHEDULER
248
SCHEDULER THAT INSERTS LOCK ACTIONS
If transaction is delayed, waiting for a lock,
Scheduler performs following actions
Takes the stream of requests generated by the
transaction & insert appropriate lock modes to
db operations (read, write, or update)
Take actions (a lock or db operation) from
above step and executes it.
Determine the transaction (T) that action
belongs and status of T (delayed or not). If T
is not delayed then
Database access action is transmitted to the database
and executed
249
249
SCHEDULER THAT INSERTS LOCK ACTIONS
If lock action is received by Later , it checks the L
Table whether lock can be granted or not i >
Granted, the L Table is modified to include
granted lock ii >Not G. then update L Table about
requested lock then later step delays transaction T
When a T = commits or aborts, former is notified
by the transaction manager and releases all locks.
If any transactions are waiting for locks of
former to notifies later.
Then later when notified about the lock on some
DB element, determines next transaction T’ to get
lock to continue.
250
250
THE LOCK TABLE
A
relation that associates database elements
with locking information about that element
Implemented with a hash table using
database elements as the hash key
Size is proportional to the number of lock
elements only, not to the size of the entire
database
DB
element A
Lock
information
for A
251
251
LOCK TABLE ENTRIES STRUCTURE
Some Sort of information
found in Lock Table entry
1>Group modes
-S: only shared locks are
held
-X: one exclusive lock and
no other locks
- U: one update lock and one
or more shared locks
2>wait : one transaction
waiting for a lock on A
3>A list : T currently hold
locks on A or Waiting252
for
lock on A
252
HANDLING LOCK REQUESTS
Suppose transaction T requests a lock on A
If there is no lock table entry for A, then there are no
locks on A, so create the entry and grant the lock
request
If the lock table entry for A exists, use the group mode
to guide the decision about the lock request
253
253
HANDLING LOCK REQUESTS
If
group mode is U (update) or X (exclusive)
No other lock can be granted
Deny the lock request by T
Place an entry on the list saying T requests a lock
And Wait? = ‘yes’
If
group mode is S (shared)
Another shared or update lock can be granted
Grant request for an S or U lock
Create entry for T on the list with Wait? = ‘no’
Change group mode to U if the new lock is an update
lock
254
254
HANDLING UNLOCK REQUESTS
Now suppose transaction T unlocks A
Delete T’s entry on the list for A
If T’s lock is not the same as the group mode, no need
to change group mode
Otherwise check entire list for new group mode
S: GM(S) or nothing
U: GM(S) or nothing
X: nothing
255
255
HANDLING UNLOCK REQUESTS
If the value of waiting is “yes" need to grant one or
more locks using following approaches
First-Come-First-Served:
Grant the lock to the longest waiting request.
No starvation (waiting forever for lock)
Priority to Shared Locks:
Grant all S locks waiting, then one U lock.
Grant X lock if no others waiting
Priority to Upgrading:
If there is a U lock waiting to upgrade to an X
256
lock, grant that first.
256
18.6 MANAGING
HIERARCHIES OF
DATABASE ELEMENTS
It Focus on two problems that come up when there
id tree structure to our data.
Tree Structure : Hierarchy of lockable elements.
And How to allow locks on both large elements,
like Relations and elements in it such as blocks
and tuples of relation, or individual.
Note: Another is data that is itself organized in a
tree. A major example would be B-tree index.
257
LOCKS WITH MULTIPLE
GRANULARITY
Database Elements” : It is sometime noticeably the
various elements which can be used for locking.
Eg: Tuples, Pages or Blocks, Relations etc.
Granularity locks and Types : While putting locks
actually when we decide which database element
is to be used for locking makes it separates in
two types.
Types of granularity locks:
1) Large grained
2) Small grained
258
EXAMPLE
Small granularity locks: Larger concurrency can achieved.
Large granularity locks: Some times saves from unserializable
259
behavior.
WARNING LOCKS
The solution to the problem of managing locks at different
granularities involves a new kind of lock called a “Warning.“
It is helpful in hierarchical or nested structure .
It involves both “ordinary” locks and “warning” locks.
Ordinary
locks: Shared(S) and Exclusive(X) locks.
Warning
locks: Intention to shared(IS) and Intention to
Exclusive(IX) locks.
260
WARNING PROTOCOLS
These are the rules to be followed while putting locks on
different elements.
To
place an ordinary S or X lock on any element. we must
begin at the root of the hierarchy.
If we are at the element that we want to lock, we need
look no further. We request lock there only, If the element
is down in hierarchy then place warning lock on that node
respective of shared and exclusive locks and then Move on
to appropriate child and then try steps 2 or 3 and until you
go to desired node and then request shared or exclusive
lock.
261
COMPATIBILITY MATRIX
IS
IX
S
X
IS
YES
YES
YES
NO
IX
YES
YES
NO
NO
S
YES
NO
YES
NO
X
NO
NO
NO
NO
IS column: Conflicts only on X lock.
IX column: Conflicts on S and X locks.
S column: Conflicts on X and IX locks.
X column: Conflicts every locks.
262
WARNING PROTOCOLS
Consider the relation:
M o v i e ( t i t l e , year, length, studioName)
Transaction1 (T1):
SELECT *
FROM Movie
WHERE title = 'King Kong';
Transaction2(T2):
UPDATE Movie
SET year = 1939
WHERE title = 'Gone With the Wind';
When
ever some transaction inserts sub elements to the
node being locked then there may be problem like
serializability issues.
Lets have transaction 3 (T3) to be executed:
SELECT SUM(length)
FROM Movie
WHERE studioName = ‘Disney’
But at the same time the transaction t4 inserts the new movie of
‘Disney’ studio. Then what happens if t3 gets executed and t4
afterwards that sum will be incorrect.
But solution could be we could treat the insert or delete transaction like
writing operation with exclusive locks at that time this problem gets
solved.
263
18.7 TREE PROTOCOL
Tree
structures that are formed by the
link pattern of the elements themselves.
Database are the disjoint pieces of data,
but the only way to get to Node is through
its parent.
B
trees are best example for this sort of
data.
Knowing
that we must traverse a
particular path to an element give us
some important freedom to manage locks
differently from two phase locking
approaches.
264
TREE BASED LOCKING
B tree index in a system that treats individual
nodes( i.e. blocks) as lockable database elements.
The Node Is the right level granularity.
We use a standard set of locks modes like
shared,exculsive, and update locks and we use
two phase locking
265
RULES FOR ACCESS TREE
STRUCTURED DATA
There
are few restrictions in locks from
the tree protocol.
We assume that that there are only one
kind of lock.
Transaction is consider a legal and
schedules as simple.
Expected restrictions by granting locks
only when they do not conflict with locks
already at a node, but there is no two
phase locking requirement on
transactions.
266
WHY THE TREE PROTOCOL WORKS.
A transaction's first lock may be at any node of
the tree.
Subsequent locks may only be acquired if the
transaction currently has a lock on the parent
node.
Nodes may be unlocked at any time
A transaction may not relock a node on which it
has released a lock, even if it still holds a lock on
the node’s parent
267
A tree structure of Lockable
elements
268
THREE TRANSACTIONS FOLLOWING
THE TREE PROTOCOL
269
WHY THE TREE PROTOCOL WORKS?
The Tree protocol forces a serial order on the
transactions involved in a schedule.
Ti <sTj if in schedule S., the transaction Ti and Tj
lock a node in common and Ti locks the node
first.
270
EXAMPLE
If
precedence graph drawn from the
precedence relations that we defined
above has no cycles, then we claim that
any topological order of transactions is an
equivalent serial schedule.
For Example either ( T1,T2,T3) or
(T3,T1,T2) is an equivalent serial
schedule the reason for this serial order is
that all the nodes are touched in the same
order as they are originally scheduled.
271
If two transactions lock several elements in common,
then they are all locked in same order.
I am Going to explain this with help of an example.
272
PRECEDENCE GRAPH DERIVED
FROM SCHEDULE
273
EXAMPLE:--4 PATH OF ELEMENTS
LOCKED BY TWO TRANSACTIONS
274
CONTINUED….
Now
Consider an arbitrary set of transactions
T1, T2;.. . . Tn,, that obey the
tree protocol and lock some of the nodes of a
tree according to schedule S.
First among those that lock, the root. they do
also in same order.
If
Ti locks the root before Tj, Then Ti locks every
node in common with Tj does. That is Ti<sTj, But
not Tj>sTi.
275
18.8 CONCURRENCY CONTROL BY
TIMESTAMP
Concurrency is a property of a systems in which
several computations are executing and overlapping
in time, and interacting with each other.
Timestamp is a sequence of characters, denoting the
date or time at which a certain event occurred.
Example of Timestamp:
20-MAY-09 05.45.14.000000 AM
18/23/2003 14:55:14:000000
276
Timestamping
We assign a timestamp to transaction and timestamp
is usually presented in a consistent format, allowing
for easy comparison of two different records and
tracking progress over time; the practice of recording
timestamps in a consistent manner along with the
actual data is called timestamping.
277
TIMESTAMPS
To use timestamping as a concurrency-control method,
the scheduler needs to assign to each transaction T a
unique number, its timestamp TS(T). It is generated by
usually two approaches
Using system clock
Another approach is for the scheduler to maintain a
counter. Each time when transaction starts the counter is
incremented by 1 and new value become timestamp for
transaction.
278
Whichever method we use to generate
timestamp , the scheduler must maintain a
table of currently active transaction and their
timestamp.
To use timestamps as a concurrency-control
method we need to associate with each
database element x two timestamps and an
additional bit.
RT(x) The read time of x.
WT(x) The write time of x.
C(x) The commit bit of x. which is true if and only if
the most recent transaction to write x has already
committed. The purpose of this bit is to avoid a
situation of “Dirty Read”.
279
PHYSICALLY UNREALIZABLE
BEHAVIORS
Read too late
Transaction T tries to read too late
280
Write too late
Transaction T tries to write too late
281
PROBLEM WITH DIRTY DATA
T could perform a dirty read if it is reads X
282
A write is cancelled because of a write with a later timestamp, but the writer
283
then aborts
RULES FOR TIMESTAMP BASED SCHEDULING
1.
2.
3.
Granting Request
Aborting T (if T would violate physical reality) and
restarting T with a new timestamp (Rollback)
Delaying T and later deciding whether to abort T or
to grant the request
284
Rules
Request RT(X):
1. If TS(T) >= WT(X), the read is physically
realizable
a) If C(X) is true, grant the request. If TS(T) >
RT(X), set RT(X) := TS(T); otherwise do not
change RT(X)
b) If C(X) is false, delay T until C(X) becomes
true or the transaction that wrote X aborts
2.
If TS(T) < WT(X), the read is physically
unrealizable. Rollback T; abort T and restart it285
with a new, larger timestamp
Request WT(X):
1. If TS(T) >= RT(X) and TS(T) >= WT(X), the write
is physically realizable and must be performed
a) Write the new value for X
b) Set WT(X) := TS(T), and
c) Set C(X) := false
2. If TS(T) >= RT(X), but TS(T) < WT(X), then the
write is physically realizable, but there is already
a later value in X. If C(X) is true, then ignore the
write by T. If C(X) is false, delay T
3. If TS(T) < RT(X), then the write is physically
unrealizable
286
TIMESTAMPS VS LOCKS
Timestamps
Locks
Superior if most transactions are Superior in high-conflict
read-only rare that concurrent situations
transactions will read or write
the same element
In high-conflict situations,
rollback will be frequent,
introducing more delays than a
locking system
Frequently delay transactions as
they wait for locks
287
18.9 CONCURRENCY CONTROL BY
VALIDATION
What is Validation?
Optimistic concurrency control
Concurrency Control assumes that conflicts between
transactions are rare
Scheduler maintains record of active transactions
Does not require locking
Check for conflicts just before commit
288
DIFFERENT VALIDATION PHASES
Read Phase
Reads from the database for the elements in its read
set
ReadSet (Ti): It is a Set of objects read by
Transaction Ti.
Whenever the first write to a given object is
requested, a copy is made, and all subsequent writes
are directed to the copy
When the transaction completes, it requests its
validation and write phases
289
CONTINUED………..
Validation
Phase
Checks are made to ensure serializability is
not violated
Scheduling of transactions is done by
assigning transaction numbers to each
transactions
There must exist a serial schedule in which
transaction Ti comes before transaction Tj
whenever t(i) < t(j)
If validation fails then the transaction is rolled
back otherwise it proceeds to the
290
CONTINUED……………..
Write
Writes the corresponding values for the elements in
its write set
WriteSet (Ti): Set of objects where Transaction Ti
has intend to write on it.
Locally written data are made global
291
DIFFERENT TERMINOLOGIES
Scheduler maintains 3 states
Transactions that are started but not yet
validated
VAL
START(T), VAL(T), FIN(T)
START
Transactions that are validated but not yet
finished
FIN
Transactions that are finished
292
RULE 1 FOR VALIDATION
Rule
1
T1
T2
T2 starts before T1 finishes
FIN(T1) > START(T2)
RS(T2) WS(T1) =
Rule
TimeLine
Write
Validation
Read
2
T1
T2
T2 starts before T1 finishes
FIN(T1) > VAL(T2)
WS(T2) WS(T1) =
TimeLine
Validation
Interference –
Write
Leads to
293 of T2
Rollback
No Problem
VALIDATION RULES
T2 & T1
T3 & T1
RS(T2) WS(T1) = {B} {A,C} =
WS(T2) WS(T1) = {D} {A,C} =
RS(T3) WS(T1) = {B} {A,C} =
WS(T3) WS(T1) = {D,E} {A,C} =
T3 & T2
RS(T3) WS(T2) = {B} {D} =
WS(T3) WS(T2) = {D,E} {D} = D // Rule 2 Can't be
applied; FIN(T2) < VAL(T3)
294
CONTINUED…………
T4 Starts before T1 and T3 finishes. So T4 has to be
checked against the sets of T1 and T3
T4 & T1
RS(T4) WS(T1) = {A,D} {A,C} = {A}
Rule 2 can not be applied
T4 & T3
RS(T4) WS(T3) = {A,D} {D,E} = {D}
WS(T4) WS(T3) = {A,C} {D,E} =
295
COMPARISON
Lock
Lock management overhead
Deadlock detection/resolution.
Concurrency is significantly lowered, when
congested nodes are locked. Locks can not be
released until the end of a transaction
Conflicts are rare. (We might get better
performance by not locking, and instead
checking for conflicts at commit time.
Timestamp
Deadlock is not possible
Prone to restart
296
CONTINUED………….
Validation
Optimistic Concurrency Control is superior to
locking methods for systems where transaction
conflict is highly unlikely, e.g query dominant
systems.
Avoids locking overhead
Starvation: What should be done when
validation repeatedly fails ?
Solution: If the concurrency control detects a
starving transaction, it will be restarted, but
without releasing the critical section
semaphore, and transaction is run to the
completion by write locking the database
297
CHAPTER 21
Information Integration
21.1 Introduction to Information Integration
21.2 Modes of Information Integration
21.3 Wrappers in Mediator-Based Systems
298
21.1 INTRODUCTION TO INFORMATION
INTEGRATION
Need for Information Integration
All the data in the world could put in a single database
(ideal database system)
In the real world (impossible for a single database):
databases are created independently hard to design a
database to support future use
299
EXAMPLE OF INFORMATION
INTEGRATION
Registrar: to record student and grade
Bursar: to record tuition payments by students
Human Resources Department: to record employees
Other department….
300
HOW TO INTEGRATE THE DATABASE
Start over
build one database: contains all the legacy databases;
rewrite all the applications
result: painful
Build a layer of abstraction (middleware)
on top of all the legacy databases
this layer is often defined by a collection of classes
301
HETEROGENEITY PROBLEM
What is Heterogeneity Problem
Aardvark Automobile Co.
1000 dealers has 1000 databases
to find a model at another dealer
can we use this command:
SELECT * FROM CARS
WHERE MODEL=“A6”;
302
21.2 MODES OF INFORMATION
INTEGRATION
Federations
The simplest architecture for integrating several DBs
One to one connections between all pairs of DBs
DBs talk to each other, n(n-1) wrappers are needed
Good when communications between DBs are
limited
303
WRAPPER
Wrapper : a software translates incoming queries
and outgoing answers. In a result, it allows
information sources to conform to some shared
schema
304
FEDERATIONS DIAGRAM
2 Wrappers
2 Wrappers
2 Wrappers
2 Wrappers
2 Wrappers
2 Wrappers
DB3
DB4
A federated collection of 4 DBs needs 12 components to translate queries from one
to another
305
EXAMPLE
Car dealers want to share their inventory. Each
dealer queries the other’s DB to find the needed
car.
Dealer-1’s DB relation: NeededCars
(model,color,autoTrans)
Dealer-2’s DB relation: Auto(Serial, model, color)
Options (serial,option)
wrapper
Dealer-1’s DB
wrapper
Dealer-2’s DB
306
CONTINUED………..
For(each tuple(:m,:c,:a) in NeededCars){
if(:a=TRUE){/* automatic transmission wanted */
SELECT serial
FROM Autos, Options
WHERE Autos.serial = Options.serial AND Options.option =
‘autoTrans’
AND Autos.model = :m AND Autos.color =:c;
}
Else{/* automatic transmission not wanted */
SELECT serial
FROM Auto
WHERE Autos.model = :m AND
Autos.color = :c AND
NOT EXISTS( SELECT * FROM Options WHERE serial =
Autos.serial
AND option=‘autoTrans’);
}
}
307
DATA WAREHOUSE
Sources are translated from their local schema to a global
schema and copied to a central DB.
User transparent: user uses Data Warehouse just like an
ordinary DB
User is not allowed to update Data Warehouse
308
DIAGRAM OF DATAWARE HOUSE
User
query
result
Warehouse
Combiner
Extractor
Source 1
Extractor
Source 2
309
EXAMPLE……………….
Construct a data warehouse from sources DB of 2 car dealers:
Dealer-1’s schema: Cars(serialNo,
model,color,autoTrans,cdPlayer,…)
Dealer-2’s schema: Auto(serial,model,color)
Options(serial,option)
Warehouse’s schema:
AutoWhse(serialNo,model,color,autoTrans,dealer)
Extractor --- Query to extract data from Dealer-1’s data:
INSERT INTO AutosWhse(serialNo, model, color, autoTans, dealer)
SELECT serialNo,model,color,autoTrans,’dealer1’
From Cars;
310
CONTINUED………….
Extractor --- Query to extract data from Dealer-2’s data:
INSERT INTO AutosWhse(serialNo, model, color, autoTans, dealer)
SELECT serialNo,model,color,’yes’,’dealer2’
FROM Autos,Options
WHERE Autos.serial=Options.serial AND
option=‘autoTrans’;
INSERT INTO AutosWhse(serialNo, model, color, autoTans, dealer)
SELECT serialNo,model,color,’no’,’dealer2’
FROM Autos
WHERE NOT EXISTS ( SELECT * FROM serial =Autos.serial
AND option = ‘autoTrans’);
311
HOW TO CONSTRUCT A DATA WARE
HOUSE
Periodically reconstructed from the current data in
the sources, once a night or at even longer intervals.
Advantages: simple algorithms.
Disadvantages: Need to shut down the warehouse; data can
become out of date.
Updated periodically based on the changes(i.e. each
night) of the sources.
Advantages: Involve smaller amounts of data. (important
when warehouse is large and needs to be modified in a short
period)
Disadvantages: the process to calculate changes to the
warehouse is complex. Data can become out of date.
Changed immediately, in response to each change or
a small set of changes at one or more of the sources.
Advantages: data won’t become out of date.
Disadvantages: Requires too much communication, therefore,
it is generally too expensive.
312
Virtual
warehouse, which supports a
virtual view or a collection of views, that
integrates several sources.
Mediator doesn’t store any data.
Mediators’ tasks:
a) receive user’s query,
b) send queries to wrappers,
c) combine results from wrappers,
d) send the final result to user.
313
MEDIATOR DIAGRAM
Result
User query
Mediator
Query
Result
Result
Wrapper
Query
Result
Source 1
Query
Wrapper
Query
Result
Source 2
314
EXAMPLE
Same data sources as the example of data
warehouse, the mediator
Integrates the same two dealers’ source into a
view with schema:
AutoMed(serialNo,model,color,autoTrans,dealer)
When the user have a query:
SELECT sericalNo, model
FROM AkutoMed
Where color=‘red’
315
ANOTHER EXAMPLE…
In this simple case, the mediator forwards the same query
to each
Of the two wrappers.
Wrapper1: Cars(serialNo, model, color, autoTrans,
cdPlayer, …)
SELECT serialNo,model
FROM cars
WHERE color = ‘red’;
Wrapper2: Autos(serial,model,color); Options(serial,option)
SELECT serial, model
FROM Autos
WHERE color=‘red’;
316
DIFFERENT SOLUTIONS
There
may be different options for the
mediator to forward user query,
for example, the user queries if there are a
specific model&color car
(i.e. “Gobi”, “blue”).
The
mediator decides 2nd query is needed
or not based on the result of
1st query. That is, If dealer-1 has the
specific car, the mediator doesn’t
have to query dealer-2.
317
21.3 WRAPPERS IN MEDIATOR-BASED
SYSTEMS
Wrappers in Mediator-based
Systems
More complicated than that in most data
warehouse system.
Able to accept a variety of queries from the
mediator and translate them to the terms of the
source.
Communicate the result to the mediator.
318
TEMPLATES FOR QUERY PATTERNS
Use
notation T=>S to express the idea
that the template T is turned by the
wrapper into the source query S.
Example 1
Dealer 1
Cars (serialNo, model, color, autoTrans,
navi,…)
For
use by a mediator with schema
AutoMed (serialNo, model, color,
autoTrans, dealer)
319
CONTINUED…………
We
denote the code representing that
color by the parameter $c, then the
template will be:
SELECT *
FROM AutosMed
WHERE color = ’$c’;
=>
SELECT serialNo, model, color, autoTrans, ’dealer1’
FROM Cars
WHERE color=’$c’;
(Template T => Source query S)
There will be total 2n templates if we have the
option of specifying n attributes.
320
WRAPPER GENERATORS
The wrapper generator creates a table holds the
various query patterns contained in the
templates.
The source queries that are associated with each.
A driver is used in each wrapper, the task of the
driver is to:
Accept a query from the mediator.
Search the table for a template that matches the
query.
The source query is sent to the source, again
using a “plug-in” communication mechanism.
The response is processed by the wrapper.
Filter: -Have a wrapper filter to supporting more
queries
321
EXAMPLE 2
If
wrapper is designed with more
complicated template with queries specify
both model and color.
SELECT *
FROM AutosMed
WHERE model = ’$m’ AND color = ’$c’;
=>
SELECT serialNo, model, color, autoTrans, ’dealer1’
FROM Cars
WHERE model = ’$m’ AND color=’$c’;
Now we suppose the only template we have is
color. However the wrapper is asked by the
Mediator to find “blue Gobi model car.”
322
SOLUTION
Use template with $c=‘blue’ find all blue
cars and store them in a temporary
relation
TemAutos (serialNo, model, color,
autoTrans, dealer)
2.The wrapper then return to the mediator
the desired set of automobiles by
excuting the local query:
1.
SELECT*
FROM TemAutos
WHERE model= ’Gobi’;
323
REFERENCES .
Database complete Book
324