Mathematical Modeling Organizational Learning
advertisement

A Model of Information Processing Aspects of Organizational
Learning and Performance
Aris M. Ouksel
University of Illinois at Chicago
Dept. of Info. & Decision Sciences (M/C 294)
Dept. of Computer Science
Chicago, IL 60607-7124
Contact: email: aris@uic.edu
Kathleen Carley
Department of Social and Decision Sciences
Carnegie Mellon University
Pittsburgh, PA 15213
Abstract
We propose a
mathematical model to provide a platform for the study of the
information processing aspects of organizational learning as they apply to a twovalued decision making task and the relation of such aspects to organizational
structure. Our primary contribution is to further understanding of the use and power
of formal mathematical models in this area. In particular, we demonstrate that the
model can capture many of the important features of inductive learning in an
decision-making environment where the decisions tasks are interrelated by complex
propositional logic expressions.
We begin with a simple model which assumes
independent equally weighted tasks, and examine its assumptions and practical
implications. We then extend the model into a more formal, mathematical context.
Improving the robustness of the model is investigated through the relaxation of
assumptions. Additional questions that are addressed concern the impact of data
interdependencies on organizational learning and the conditions under which
inconclusive decision rules may occur. Future research directions are also discussed.
1
A Mathematical Model for Organizational Performance
I. Introduction
The motivation for this research can be seen in the confluence of two major trends in the business world
of the 1990's and beyond. The first of these is the increasing importance of organizational learning as a
corporate survival skill (Garvin, 1993). Intense competitive pressures have been brought on by the ever
accelerating rate of technological change and the accompanying globalization of our economies. The
second major trend is the movement towards flatter and other than hierarchical organizational structures
(Tomasko, 1993, Johansen & Swigart, 1994). The popular media are full of reports of corporate
restructuring, with "down-sizing'' and the more euphemistic "right-sizing'' being the overwhelming
themes. Advances in information technology (IT) are typically credited (or blamed, depending on the
perspective) with enabling such dramatic corporate restructuring to occur.
The overall thesis of our research is that the technology-driven trend towards flatter
organizational structures has run up against a formidable barrier of what is commonly referred to as
“information overload” (Davenport, 1997). Paradoxically, the availability of volumes of unfiltered
information leads to a decrease in productivity, thereby suggesting that flatter organizations are not
necessarily the panacea to streamlining workflows in organizations in all situations. In fact, as we have
shown in (Mihavics & Ouksel, 1996a), no organizational structure is best for all scenarios; rather, the
ideal structure is contingent on the environment (Lawrence & Lorsch, 1967), the complexity of the task
(Burton and Obel, 1998), and the cognitive architecture of the agents (Carley, Prietula and Lin, 1998). It
has also been suggested that the hierarchy will begin to come back into vogue as the information
overload increases, except that this time many of the nodes will be intelligent software agents acting as
information filters (Davenport, 1997; Carley, 2001). This conclusion has been validated in our research
for simple decision functions in (Ouksel & Vyhmeister, 2000), where it is shown that the performance of
hierarchies outperform flat structures as the volume of information goes beyond a threshold. The results
2
were however preliminary. A thorough analysis will require more sophisticated decision functions and
learning. The modeling in this article represents the first step towards capturing more complex
relationships in the environmental data.
This research then is aimed at increasing our understanding of organizational learning. and its
relation to organization structure. Organization structure provides the framework within which various
coordination and control mechanisms can be brought to bear on organizational learning (Arrow, 1974;
Williamson 1975). Such mechanisms are in fact types of information processing systems used in an
attempt to continually improve the decision making performance in successful organizations (Simon,
1976). Thus the primary determinant of organizational structure can be seen in terms of its information
needs, especially as they relate to the resolution of uncertainty within their environments (Stinchcombe,
1990; Galbraith, 1973; Simon, 1981;Carley, 2003).
One goal in this article is to design a mathematical model to serve as a platform for the
investigation of more robust results in organizational learning. One of the most crippling obstacles to
progress in the field of organizational learning stems from the lack of precise, explicit definitions of
terms (Huber, 1991).
In the past decade, the wealth of research in this area has laid bare some
fundamental lines along which to discriminate aspects of organizational learning. To begin with, the
literature generally distinguishes between individual and organizational learning (Fiol and Lyles, 1985;
Levitt and March, 1988; Carley, 1992; Attewell, 1992; Argote, 1993; Anderson, Baum and Miner, 1999)
both of which can take place within the actor (individual or organization) or among actors. Individual
learning is typically demonstrated by changes in actions or the associated performance scores and
changes in mental models. Organizational learning is more difficult to demonstrate and has been
measured in terms of changes in routines, rules, performance, and efficiency made possible by both the
accumulation of individual learning and the existence structural learning (Argote, 1999). In both cases,
learning occurs at different levels and by different means; e.g., it may occur incrementally through
experiential or exploitation procedures in a single loop fashion or by leaps based or discovery in a
3
double loop fashion (Argyris and Schön,, 1978; March, 1995). Learning among actors has been
characterized as structural learning (Carley and Hill, 2001) and is seen in changes in the underlying
network of relations among actors and/or the transfer of technology or personnel among organizations.
Learning need not lead to improved performance as when individual learning fails to become embedded
in organizational routines
(Attewell, 1992), types of learning clash (Carley, 1999) or when
"superstitious learning" occurs (Fiol and Lyles, 1985 ).
In this paper, we follow in the neo-information processing tradition (Carley, 1990, 1992; Levitt
and March 1988) and treat learning in terms of changes in routines through the accumulation and
embedding of individual experience. As such, learning consists of "encoding inferences from history
into routines that guide future behavior'' (Levitt and March, 1988).
This definition will allow us to
objectively quantify the amount of learning that occurs within each organizational structure and thereby
to compare both amounts and rates of learning across various structures. Note there are caveats to this
view. In particular, it does not deal with the case of novel situations where historic routines may be
useless, cases of clashes between levels of learning, and structural learning
It is important to note that the view of learning that we have adopted builds on three classical
observations of organizational behavior: 1) behavior within organizations is based on routines (Cyert &
March, 1963; Nelson & Winter, 1982) which can be coded as rules (Levinthal and March, 1993); 2)
organizational actions are history-dependent (Lindblom, 1959; Steinbruner, 1974; Lin and Carley, 2003);
and 3) organizations are engaged in tasks that may have specific goals (Simon, 1955; Siegel, 1957) such
that the goals and the tasks constrain the set of available actions (Carley and Newell, 1994).
The first point means that most organizational decisions do not involve attempts to calculate
various projected outcomes and then select the optimal scenario. Such calculations are typically too
complex to be practically useful. Instead an inventory of routines is developed.
The second point is
that organizational actions are by and large determined merely by matching previously used procedures
(routines) to certain types of situations that have been encountered in the past. The third point is that
4
organizations are goal oriented and control their behavior through feedback involving regular
measurements of actual results against targeted aspiration levels.
The term "structure" is similarly troublesome to find a generally agreed upon definition for in
the literature. For example, organization structure has been defined to include: 1) "those aspects of the
pattern of behavior in the organization that are relatively stable and change only slowly'' (March and
Simon, 1958); 2) "myth and ceremony'' (Myer and Rowan, 1977); 3) "informal networks of influence''
(Granovetter, 1974); 4) those channels through which “power” is exercised (Pfefer, 1981), 5) the
network of relations connecting people, knowledge, resources and tasks that constrain and enable
organizational behavior (2002). In this study, use the term "structure" in a narrow, operational sense
(Carley, 1992; 2002) to refer to the a) formal lines of communication and management reporting
linkages in the organization and b) who has access to what basic information or “evidence”. In this
sense, we are using both the personnel network and the knowledge network cells in the meta-matrix of
organizational design (Carley, 2002).
Illustrative
organizational structures one might study are
discussed in Section II.
In using such simple, operational definitions there is of course the danger that some important
aspects of organizational learning and organizational design will be missed. Admittedly, a formal
reporting structure is only a relatively superficial notion of how things get really done within
organizations. For example, innformal networks certainly play an important role in organizations
(Granovetter, 1974), but they are not captured in our models at the moment.
The remaining sections proceed as follows.
Section III describes and defines the formal
mathematical model. Section IV discusses the use of this new model and the types of problems it may
be able to provide insights on. Section V elaborates on the importance of data interdependencies and
their impact on organizational learning. Section VI addresses the problems introduced by inconclusive
decision rules, and finally a conclusion and discussion of future research directions is included in Section
VII.
II. Research Background
5
As previously noted, the view of organizational learning we follow is based on the theory that learning
depends in large measure on paying careful attention to events that have already taken place. Thereafter
generalizations can be made based upon this past data, and these generalizations can in turn be applied to
future situations that are deemed appropriately similar (Stinchcombe, 1990, Cohen, 1991, March,
Sproull, and Tamuz, 1991). Our research focuses on this type of data-driven, or “experiential learning”
(Carley, 1992), which is inductive or "bottom-up" in nature. This is in stark contrast to the view of
learning as embodied in typical corporate training programs centers around domain-based learning,
which is deductive or "top-down" (e.g., knowledge transfer from those who know to those who don't)
(Brown and Duguid, 1991). And like situated learning (Hutchins,1999) the networks in which the
decisionmaker is embedded limit what and when the learn; but, unlike that literature we do not focus on
the knowledge creation aspect in which new knowledge is created as individuals interact, communicate,
make offers and have them accepted by others in the network. (Tier and Von Hippel, 1997).
In addition, the model will only capture the information processing aspects of organizational
learning in that decision making is characterized as a process of information gathering and processing,
especially as it relates to the resolution of uncertainty (Stinchcombe, 1990; Galbraith, 1973; Carley
2002). Other, more humanistic or psychological aspects of learning such as motivation, power, politics,
trust, and affective issues, while undeniably important are nevertheless outside of the boundaries of the
initial model. Moreover, in our model we treat the decision makers as being both “boundedly rational”
(Simon, 1955; Simon, 1976) and cooperative (Carley and Svoboda, 1996) such that each decision maker
makes decision on the basis of known information, does not optimize, and provides information on
request that is accurate and uptodate .
This approach to learning has proven fruitful in increasing our understanding of the factors that
impact organizational learning. In this sense, our study follows the long stream of research that views
organizational decision making as being composed of the boundedly rational decision making behaviors
of constituent individual decision makers (Simon, 1976; March and Simon, 1958; Cyert and March,
6
1963; Steinbruner, 1974; March and Olsen, 1975; Padgett, 1980; Carley, 1986; Mihavics and Ouksel,
1996a; Ouksel and Vyhmeister, 2000, Lin and Carley, 2003). It is also motivated by the contingency
theory approach since we show that there is no best organizational design in any absolute sense, but
rather that organizational design should be matched to the context in which the organization exists
(Ashby, 1968; Lawrence and Lorsch, 1967; Burton and Oberl, 1998).
In particular, the approach used is an extension of Carley's initial research framework for
examining organizational decision making performance under various design constraints and operating
conditions (Carley, 1992; Mihavics and Ouksel, 1996a; Ouksel and Vyhmeister, 2000). The goal is to
model more realistic decision making functions, which capture complex data interpendencies, and will
allow us eventually to investigate subunit task complexity, and interdependence among subunits
(Tushman and Nadler, 1978; Mihavics and Ouksel, 1996b). Two aspects of organizational design will be
addressed: the personnel network defined as the management reporting structure or "who reports to
whom'' and the knowledge network defined by the task decomposition scheme or "who has access to
what information'' (Cohen, March, and Olsen, 1972; and Carley, 1990). Note, in this paper all the
information that personnel have access to must be brought to bear to solve the task; thus defining who
knows what defines how the task has been broken in to parts.
Finally, the actors in our models can usefully be thought of as decision making units – a
collection of one or more people and associated machines that act, from an organizational perspective as
a single actor. We do not distinguish between the individuals with and without computational assistance.
The agents are heterogeneous only in that they have a diversity of experience owing to their position in
the organizational structure, and not due to their personal information processing characteristics such as
access to technology, intelligence, etc.
The other general assumptions of the model include: 1) organizational decision making behavior
is historically based; 2) organizational learning depends on the boundedly rational decision making
behaviors of the individual decision makers which make up the organization; 3) subordinates condense
7
their input data into output recommendations to their superiors, and this information compression is
lossy, i.e. uncertainty absorption (March and Simon, 1958) occurs at each node in the structure; 4)
overall organizational decisions do not require that a consensus be reached (e.g. a legitimate policy
might be to let the majority opinion rule); 5) the organizational decision is two-valued (e.g. go / no go)
6) the organization faces quasi-repetitive integrated decision making tasks. Quasi-repetitive in that the
tasks are typically similar although not identical to the previous tasks. Integrated meaning the task is too
complex for a single decision maker to handle alone. So the sub-decisions of multiple agents must be
combined in some fashion (depending on the organizational design) to reach an overall organizational
decision. The tasks of interest here are assumed to be non-decomposable, meaning that combining the
correct solutions to each sub task may not always yield the correct solution to the overall task.
Each of these decision tasks that the organization faces is represented by a binary string of N
bits, where each bit of evidence is denoted xi. The organization is represented by a number of "agents''
(the sub-decision makers) who each have access to a subset of the n bit string or task , xi, xi+1, ... , xj
where 1 ≤ i < j ≤ N and (j-i) < N. Each agent examines his/her local memory of prior tasks (bit patterns)
and the corresponding past decision outcomes in an attempt to learn what their decision on the current
task ought to be. That is, they try to learn from their past experience. It is further assumed that the
organization initially knows nothing about the bits of evidence that comprise each task other than the
fact that each bit is two-valued (0 or 1) and the overall decision to be reached is similarly binary.
The model used by Carley is referred to here as the "uniform model'' since she assumed that
each bit of input evidence was of equal importance and independent of the other bits. It is our objective
to extend this model and improve its robustness by relaxing such restrictive assumptions. For example,
one conclusion drawn from the uniform model was that "teams in general learn faster and better than
hierarchies'' (Carley, 1992). It is our contention that the generalizability of these results depends on the
constraints placed upon the inherent decision functions employed in the model, which are contingent on
the environmental constraints (Lawrence & Lorsh, 1967).
8
The decision function used within the uniform model can be expressed as:
(1)
⎧1 if z ≥ 0
sign(z ) = ⎨
where z = f (b1, ... , bn ) = b1 + . . . + bn - n/2.
⎩0 otherwise
For example, an employee (node) within the organizational structure with 5 input bits of data
(e.g. five direct subordinates) would, over time, learn to associate an input bit pattern containing a
preponderance of 1 values with the correct overall organizational decision of "1." Thus through inductive
pattern matching he would learn to send a "1" recommendation to his superior in such situations.
Our first extension to this basic model is thus to relax the assumption of uniform weights of
evidence, and study the impact on organizational performance and learning (Mihavics & Ouksel, 1996b,
Ouksel & Vyhmeister, 2000). This can be accomplished directly with a simple extension to the decision
function so that:
(2)
z = f ( b1 , ... , b n ) = ( ∑ a j b j ) j
∑a
j
j
2
where aj is the weight of evidence bj, and bj has value “1” if the evidence is available and “0” otherwise,
for 1≤ j ≤n. This function is positive if the sum of the weights of the available evidence is more than half
the sum of all the weights. In other words, if there is preponderance of evidence, particularly the more
important ones, then the function is positive. This is of course a much more natural representation of the
types of decision making situations which real organizations face. In real life there is a rather low
probability that each of the N bits of evidence gathered to help make some decision are equally
important. For example, if a stock analyst were to study say ten indicators of a stock’s growth future
potential, is it likely that none of the ten indicators is any more important than any of the others? This
does not seem reasonable. Indeed, the now widely recognized need for some form of “data quality
measures” implies that data is typically not of uniform reliability in predicting some outcome (Dillard,
1992). Even so, the above representation is not sufficient to capture the complexity of decision-making
in organizations (see example in section V). Our mathematical model is intended to extend the realism of
these functions with complex logical relationships between the features of evidence.
III. A Formal Mathematical Model
3.1 Modeling the decision function
9
Formally, this model assumes that each class of input "events" (decision tasks) is fully defined by the
set of features which we enumerate from 1 to n. Thus to begin we let Bn = {b=(b1, ... , bn) | bi ∈ {0,1} }
be the set of binary sequences of length n (i.e., Bn represents a binary vector with n elements). For b ∈
Bn let bi denote the value of the i-th element of the vector b. We assume that the vector b consists of
the results of independent random trials.
Also let pi be the probability that bi = 1, and let qi be the
probability that bi = 0. Obviously then pi = 1 - qi. Thus b ∈ Bn denotes the result of a multiple random
experiment. A simplifying assumption that pi = qi = .50 is used in the initial simulation model (Carley,
1992)1. Intuitively the set Bn of vectors b = ( b1, ... , bn ) can be viewed as a sequence of values of the
features which fully describe the class of possible events. The value of bi describes whether the i-th
feature is present or not. For example, if the 6th feature is "adverse weather" then b6 = 0 means adverse
weather conditions were not present. The probability pi represents the probability of the appearance of
feature i in the experiment known a priori. We'll call b ∈ Bn an event.
To model a "go / no go" type of decision we need a mapping from the set of input data vectors,
Bn, to the set { 0, 1 }. This mapping induces a partition of the set of all events into two classes, those for
which the correct decision was 0 and those for which it is was 1. Thus, the space of classes is simply
{{0},{1}}. Each class is fully defined by the classification function Γ which is defined as follows:
(3)
Γ : Bn |→ {0,1}
b |→ Γ(b ) = sign ( f ( b ) )
where f is a polynomial function with rational coefficients defined over the set of binary vectors Bn,
and b is a variable over Bn. The rational coefficients are simply the weights of each bit of evidence in b.
Let z denote function f(b) in equation (3). Then we define sign(z) below as follows:
(4)
1Carley
⎧1 if z ≥ 0
⎩0 otherwise
Γ(b )= sign ( z ) = ⎨
(1990) does explore the impact of a biased decision task, where bias is defined as the extent to which pi
diverges from .50.
10
sign(z) is “1” if there is a preponderance of evidence and “0” otherwise. The set of events is thus
partitioned into two classes, which we denote as Class 1 (or as {1}) and Class 0 (or as {0}), and which
we define as follows:
i) Class 1 = { b | b ∈ Bn, Γ(b) = 1 }
ii) Class 0 = { b | b ∈ Bn , Γ(b) = 0 } = the complement of Class 1.
In order to accommodate the general polynomial, we define the function f such that:
∑a
f ( b1 , ... , b n ) =
(5)
j
b1v1 ... b vn n
j
where v = ( v1 , ... , v n ) , v i ∈ {0,1}, a j ∈ K
v
v
where each of b1 1 ... b n n is a monomial K represents the set of rational numbers and coefficients (aj)
are in fact equal to zero for almost all strings v (of the 2n total possible strings). For example z = f(b1, ...
,
b5)
=
1
0
0
b1
0
0
+
2b2
+
0
0
b3
+
0
0
2b4
0
1
+
0
0
b3⋅b5
–
0
0
4,
0
is
1
0
1. b11 b 2n b 3 n b 4n b 5 n +2. b10 b12 b 3 n b 4n b 5 n + b1 1 b 2n b 3n b 4n b 5 n + 2. b1 1 b 2n b 3 n b 4n b 5 n
equivalent
0
0
1
to
1
z=
0
+ b1 1 b 2n b 3n b 4n b 5 n -4,
where features 2 and 4 are twice as important as the others in determining the correct decision (i.e. sign
(z) ), and that each bi is independent but b3 and b5 contribute together towards the value of z through an
AND relationship. This is a significant generalization of the uniform case, which would model a 5 bit
decision task as z = f (b1, ... , b5 ) = b1 + b2 + b3 + b4 + b5 - 2.5 . Additional concrete examples will
be given later to support the significance of capturing logical relationships such as AND within the
model.
3.2 Modeling the organization structure
Next we turn our attention to the formal definition of the decision structures. The goal here is to use a
directed graph to represent the flow of decision making information through the organizational structure.
Each decision maker will be represented as a node in the graph, and the input data to his decisions will
be represented as the decision values of all of the nodes immediately subordinate to him. His learning
process then is to determine the best polynomial function for predicting the correct overall organizational
decision, given his input data bits. One "control knob" that is available to him is to adjust the weight
11
coefficients, aj, so as to accurately reflect the relative importance of each input data bit in influencing the
decision outcome.
Let G = < V, E > be a directed graph (Harary, 1969) where V is a set of nodes and E is the set of
edges. A tree (T) is a directed graph G with a distinguished node vT (the root) such that for each v ∈ V
with v ≠ vT there exists a unique path vT, ... , v from vT to v. Let Ev denote the set of edges emanating
from node v, and |Ev| the cardinality of this set. Thus:
E=
UE
v∈ V
Let the edges in Ev be numbered 1, ... , |Ev|.
v
.
For a given tree T, let Leaf(T) be the set of leaves of T
and |Leaf(T)| = n its cardinality. Let g: Leaf(T) |→ {1, ... , |Leaf(T)|} is the function enumerating the
leaves of tree T and let D be a decision function such that:
∞
(6)
D : V → U f (y1 ,..., y i )
i =1
if v ∈ Leaf(T)
⎧bg ( v )
v a D (v ) = ⎨
⎩ f(y1 ,..., y |E v | ) otherwise
That is, if the vertex is a leaf node then the decision for that node is based upon a single input data point
(bi), otherwise the decision is based upon the decision recommendations reported up the hierarchy from
each subordinate (i.e., the vertices at the end of each arc emanating downward from that vertex). The
notation used here is that each bi represents observed bits of evidence, whereas each yi represents the
recommended solution of some decision maker. The function f is specific to each node of the decision
structure. The notation used above indicates that f can be any function of the input data bits. In this
specific research, we assume it to be a rational polynomial function, whose arguments are the decision
values ( y1, ... , y|Ev| ) of its children. The form of each polynomial function f represents that decision
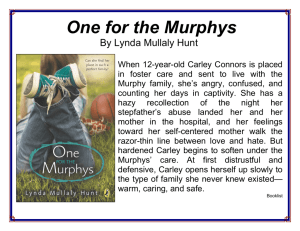
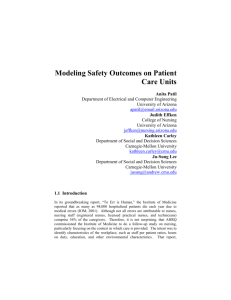
maker's estimate as to how best to evaluate his data. Figure 1 below shows a sample decision structure
with 3 different decision functions, one for each distinct decision maker within the tree. This also
12
represents an extension of previous models in that all decision makers do not perfom equally. Notice that
the observed evidence (bi) is located at the leaf nodes of the tree.
Figure 1. A Simple Hierarchical Decision Structure
Y = f(Y1,Y2,b6)
CEO
Y1 = f'(b1,b2)
Y2 = f''(b3,b4,b5)
Analyst 1
b1
Level 2
Analyst 2
b2
b3
b4
Level 1
b5
b6
Level 0
any give node v by Dv so long as the context of the discussion makes it clear which node is being
referred to.
We say that the decision structure DS admits the set of observational data Bn if |Leaf(T)|
= n (i.e., there is a leaf corresponding to each input bit of evidence).
In summary, we can say that the model of the experiment M is defined by the set of
observational data Bn, the classification rule Γ, and the decision structure DS which admits the set of
observational data Bn. We'll denote this model as M = < Bn, DS, Γ : Bn → {0,1}>.
We'll call the triplet:
DS = < T , D , g >
(7)
the decision structure on the set of observed data Bn.
For each node v of the tree T we define the
decision rule recursively, where y represents the decision recommendation propagated up the structure
from any given node, as follows:
(8)
for v ∈ Leaf(T)
⎧bg ( v )
y = D( v ) = ⎨
⎩ sign( f(D(v 1 ),..., D( v |Ev | )) otherwise
where {v1, . . . , v|Ev|} are the end nodes of edges emanating from v. This means the decision rule for
node v is to take the sign of the decision function f on the decision outcomes of each node underneath v
in the hierarchy2.
2
Hierarchies cover a large range of organizatinal structures. But bidirectional directed graphs are necessary to
define matrix or partial matrix structures. In the tree model, this is partially achieved through data and task
dependencies.
13
We will define the decision rule of the entire decision structure to be Dv T where vT is the root of
the tree T. Since the decision rule of the decision structure is dependent on the input variables at the leaf
nodes, the complete way to express this rule is Dv T (b).
Thus we have defined the map: Dv T : Bn →
{0,1} : : (b1, ... , bn) |→ Dv T ( b1, ... , bn) which is the decision map of the given decision structure. In
terms of notation, we may represent the decision rule at
IV. Uses of the Formal Model in Organizational Learning
One of the most immediate uses for this new formal approach is to be able to compare the organizational
learning potential (i.e. the limit decision making performance, expressed as a percentage of correct
decisions) of various different organizational models. To accomplish this we must define the error of
classification for a given model of an organization M.
Let Err = { b | b ∈ Bn, Dv T (b) ≠ Γ (b) } be
the set of events for which the value of the classification map and the decision rule do not coincide. This
means that the elements of this set are misclassified by the decision rule. With this notation fully defined
we are now ready to address three separate problems: 1) how to determine the error of classification; 2)
how to compare the performance between two models; and 3) how to define an inconclusive decision
rule.
Definition 1: For the given model of experiment M = < Bn, DS, Γ : Bn → {0,1}> the error of
classification by the decision rule Dv T relative to the classification function Γ is the probability of
misclassification and is computed by the formula:
(9)
ξM =
∑ (∏ p
B∈Err bi j =1
ij
) ⋅ (∏ qij )
bi j = 0
To compare learning potential within different organizational structures, we define two models
of an experiment over the same observational space Bn denoted M = < Bn, DS, Γ :Bn →{0,1}> and M'
= < Bn, DS', Γ : Bn → {0,1}>:
Definition 2: The Model M is said to be better than Model M' if ξM ≤ ξM' . It is said to be strictly
better than Model M' if ξM < ξM' .
This definition simply indicates that a model of an organization is better if, on average, it
perceives the business environment more accurately (i.e., has a lower probability of misclassifications).
14
In real life, while it is important to avoid models that constantly misclassify its environment, a small
number of errors may be vital for an organization to learn and to evolve. A perfect model may only lull
an organization into complacency and prevent it from observing unusual or novel situations. An
interesting reseach question, beyond the scope of this paper, will be to investigate what might a
permissible misclassification threshold might for a learning organization. Thirdly, a definition of
inconclusive decision rules is needed.
Definition 3: An inconclusive decision rule at any given node v is a decision rule such that for at least
one input vector b ∈ Bn we have Dv (b) = undefined.
Further discussion of inconclusive decision rules is included in section V below. To help clarify
the use of this formal approach, let's consider the class of models of experiments which is referred to as
"voting teams" (Carley, 1992). The voting team structure from Carley's model can be characterized by k
analysts each of whom analyzes r features of the decision task, and where the overall group decision is
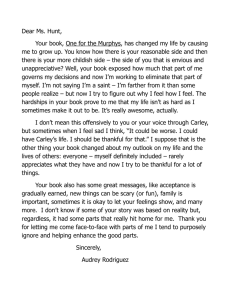
determined by voting (see Figure 2). The decision rule for each analyst is a simple majority classification
rule. Let <Bn, (p1, ... , pn)> be the probabilistic space of the experiment. As above we continue to
denote qi = 1 - pi. The true decision function in Carley's model (with uniform weights), Γ : Bn →
{0,1}, is given by the formula:
n
(10)
Γ(b ) = sign( f (b )) = sign( ∑ bi − ( n / 2 ))
i =1
This is a special case where: 1) each node employs the same decision function (after training); 2)
these decision functions are linear, with all coefficients set to 1; and 3) the classification function is
normalized about zero (i.e., equal probability for outcome 0 or 1).
Next let's formally define the decision structure on the set of evidence Bn that will simulate the
decision process of a group of k analysts each of whom has access to r bits of evidence as follows. Let
us define a tree Tk,r with k⋅(r +1) +1 nodes and k⋅(r +1) arcs, as shown in Figure 2. Let k and r be such
15
natural numbers that k ⋅ r = n and k ≠ 1 . For a given k,r let V = (vo,a1, ..., ak, c1,1, ..., ck,r) be the
set of nodes and |V| = k ⋅ (r +1) +1 . We now define an arc numbering for the given tree as follows:
(11)
For a node vo : E v = { ( v o ,a i ) } ik= 1 and fv0 : Ev0 → {1,..., k}::( v 0 , ai ) a i
o
(12)
For a node ai : Eai = {( ai , ci , j )}rj=1 and fai : Eai → {1,..., r}::( ai , ci , j ) a j
Let E = Ev0 ∪
k
UE
ai
i =1
be the set of arcs with do and d1 as previously defined (i.e., E
consists of arcs connecting the root to each analyst and each analyst to his evidence). Now let
g : Leaf(T) → {1, ..., n} : : (ci,j) |→ (i-1) ⋅ r + j . This gives a specific means for numbering each
leaf node. Next we define the decision rules for each node.
Figure 2. Sample Voting Team Decision Structure
Vote
Vo
1
k
2
Arc #
...
1
c
11
1
a
1
2
r
1
...
c
12
2
c
1r
r
c
21
r+1
a
2
2
r
...
c
22
r+2
1
a
k
2
Analysts
r
Arc #
...
c
c
c
c
Evidence
2r
k1
k2
kr
r+r (k-1)r+1 (k-1)r+2 (k-1)r+r Node #
Recall from the discussion of our general model that we introduced a function Dv so that the
particular form of the decision function f utilized by the decision maker at each node could be unique.
However, in Carley's model, in the limit (after training) all decision makers come to behave as though
they are using the same decision function -- the simple "majority classification rule" (Carley 1992).
Thus at any node v we have:
16
⎧
⎪ b
g ( ci , j )
⎪
k
⎪
(13) Dv = ⎨ sign ∑ y j − ( k / 2) for the root, v = v T
j =1
⎪
r
⎪
⎪sign ∑ y j − (r / 2) for an arbitrary node of level 1, v = ai
j= 1
⎩
Notice here that the notation yj refers to a sub-decision which is propagated up the tree by a
subordinate decision maker. Then from Equation 8 we see that the decision at any leaf node is simply
given by the value of that bit of evidence ⎛⎜ bg
⎞⎟
⎝ ( ci, j ) ⎠ , at the root we use the majority rule on the sub-
decisions of the analysts, and at the analysts' level we use the majority rule on the bits of evidence
underneath them. When applied to a specific input vector b of Bn the above formula expands to:
⎧
⎪
for any leaf, v = c i, j
b(i −1)⋅r + j
⎪
k
r
⎪
(14) Dv = ⎨ sign∑ [sign∑ b(i −1)⋅r + j − (r / 2)] − ( k / 2) for the root, v = v T
i =1
j =1
⎪
r
⎪
⎪sign ∑ b( i −1)⋅r + j − (r / 2) for an arbitrary node of level 1, v = a i
j =1
⎩
These well-defined decision formulas allow for the development of analytical means for
determining the learning performance potential of given organizational structures. We have developed
and used an algorithm based on these formulas, and utilizing prior work with "Young Diagrams" (Knuth,
1973), to confirm the simulation results obtained via Carley's model (Mihavics and Ouksel, 1996a,
Mihavics and Ouksel, 1996b).
V. Modeling Interpendencies and Implications on Learning
5.1 The Nature of Interdependent Data
As mentioned earlier, organizations act as information processing systems and attempt to cope with
uncertainty within their environments (Galbraith, 1973). In this paper, we consider three sources of
17
uncertainty: unstable subunit task environments, subunit task complexity, and interdependence among
subunits (Tushman and Nadler, 1978). The original model (Carley, 1990) assumed that all input bits of
evidence to the organization are of equal importance and independent of one another, and to this point
our primary focus has been on extending the model to include weights of evidence. Next the model is
further extended to include the possibility of subunit interdependencies. Due to space limitations, this
issue is only briefly discussed in this paper. A thorough presentation of uncertainty, based on established
results (Mihavics & Ouksel, 1996b), will be reported in a subsequent publication.
Recall that each bit of evidence can be seen to correspond to the presence (value = 1) or absence
(value = 0) of some feature of an external entity or "experiment'' that is of interest to the organization.
For example, consider an organization that manages a trust fund. One of their primary investment goals
with regards to this trust fund might well be "preservation of capital." In other words they want to invest
these trust funds in such a way as to minimize risk to principal.
Keeping this goal in mind they might decide that when investment opportunities arise which
require a relatively large capital outlay, they demand a relatively low level of risk. On the other hand
(perhaps as a hedge against inflation), they might prefer to accept a greater level of risk in certain other
investments; so long as the amount of capital at risk is rather small.
This particular investment
philosophy can be summarized as shown in the decision table below:
Table 1. Sample Data Interdependencies
Large Capital Outlay?
Low Risk exposure?
Yes
Yes
Yes
No
No
Yes
No
No
Invest?
Yes
No
No
Yes
Now if we label the three columns x1, x2, x3 and let the value 0 = "no" and 1 = "yes," we can
denote the above interdependency as: x1 XOR x2 ⇒ ¬ x3. The point of this example is twofold: 1)
such interdependencies are quite common and natural in real life; 2) they can be readily incorporated
into our model; and 3) few previous models captures this type of complex interdependencies.
18
Another significant use of this new model is that its precise formulation allows one to employ a
variety of other powerful and well-defined mathematical techniques. For example, the fact that the
decision making functions are based on the general polynomial immediately enables a natural extension
of the model to include the power of propositional logic. Thus the model is no longer constrained by the
unnatural assumption of data independence, since the fundamental logical operators of AND, OR, and
NOT can all readily be modeled as shown below:
(15)
The AND relationship is modeled as:
(16)
The exclusive OR relationship is given by:
(17)
The NOT relationship is modeled as:
xi⋅xj
xi + xj - xi⋅xj
1 - xi
With the incorporation of these three simple logical operators, complex data relationships can
now be modeled. Thus the power of the model is significantly increased. In addition, we hypothesize
that the introduction of such data dependencies should heighten the need for coordination within an
organizational structure.
We are currently researching this area, and our preliminary results tend to
confirm this notion.
5.2 General Implications for the Model
Once introduced into the model, data interdependencies can be manipulated in such a way as to test the
effect of subunit interdependency on organizational learning across different organization structures. To
begin our study of such effects we chose to focus first on a particular type of data dependency, the
"exclusive or" (denoted XOR). The XOR relationship is given by:
(33)
xi + xj - 2⋅xi⋅xj
Notice that in the above expression if evidence xi is analyzed in isolation from xj, then xi loses all
of its informational value and thus will contribute nothing towards organizational learning. The same
can of course be said of xj in relation to xi. Our first hypothesis in this area then is simply that:
H1: Data interdependencies can significantly affect organizational learning.
19
To test this hypothesis the simulation model was run under six different organizational learning
scenarios. Each of the three organizational structures (Hierarchy, Expert Team, and Majority Team) was
tested with input tasks that either did or did not include data interdependencies. The interdependencies
used here were of the XOR variety. More will be said in a moment on other types of interdependencies.
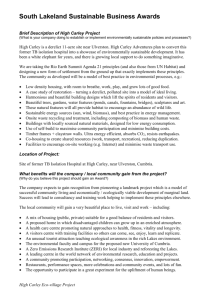
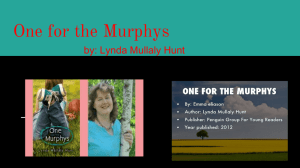
The results are shown in Table 1 and 99% Confidence Intervals are graphically displayed in Figure 3.
Each experiment included 10,000 input tasks during each of 50 simulation runs. Each input task
consisted of 27 bits of evidence. Note that the structures (The Hierarchy, Expert Team, and Majority
Team) used in the analysis are all captured by directed graphs. We omit their precise definitions here
(see Mihavics & Ouksel, 1996a) as they are not only intuitive but are not essential to the understanding
of our results below:
Table 1. Average Final Performance (w/ std. dev.)
No Interdependencies
w/ Interdependencies
Majority Team
85.6 (1.1)
62.5 (0.8)
Expert Team
84.2 (1.3)
65.7 (0.7)
Hierarchy
80.7 (1.0)
64.9 (0.8)
Learning Proficiency
Figure 3. Interdependencies Can Affect
Learning
90
80
99% C.I.
70
60
50
E.
Team
Hier.
M.
Team
From Figure 3 it is clear that there are significant reductions in the amount of learning that occurred
when data interdependencies were introduced to each of the three organizational structures. T-test
results confirmed this in that for Majority Teams we find T = -56.04 and p = 0.00 which clearly rejects
the null hypothesis that the means are equal. Similarly, we reject the null hypothesis that the means are
equal for both Expert Teams (T = -40.0, p = 0.00) and Hierarchies (T = -37.9, p = 0.00).
20
VI. Inconclusive Data
We observe many situations in the real world where the data provides no indication as to the correct
solution to some question. Thus in our model we may want to treat the presence of ambiguous evidence
as a separate case. For instance, we might introduce the option for decision makers to "abstain" from a
decision, or perhaps "don't know" could be a valid decision outcome. Instances of inconclusion are in
fact only all too common. The pervasive nature of this type of problem has lead to the acceptance of
common rules of organization such as forming committees with an odd number of members.
In definition 3 (section IV) we explicitly recognized the fact that there are occasions when the
input evidence does not indicate whether one decision is more likely to be correct than the other. Rather
than having the decision maker merely guess at the correct decision, as was our simplifying assumption
back in Equation 4 when we had set sign(z) = 1 for z = 0, here we propose a slightly different function
sign'(z):
(18)
if z > 0
⎧1
⎪
sign' ( z ) = ⎨ 0
if z < 0
⎪undefined if z = 0
⎩
The significance of this development is that it once again demonstrates the ease of extensibility and thus
the real power of this new model.
Inconclusive data (uncertainty) is clearly something organizations often go to great lengths to
attempt to avoid.
Indeed, for many researchers "uncertainty avoidance" is the sine qua non of
organization theory (March & Simon, 1958; Thompson, 1967; Galbraith, 1973; Tushman & Nadler,
1978).
Our model can capture this desire for organizations to avoid inconclusive data. This
phenomenon can be easily seen in this case where each employee (node) has access to two bits of
evidence. If the bits are of uniform weight (e.g. 5 and 5) then the probability that the agent will see
completely contradictory data is 50% (in 2 of the 4 possible patterns). If the bits are of non-uniform
weights and the weights can range from 0 through 9 then the probability of completely inconclusive
21
evidence drops to only 5.5%. Furthermore, if one employee had bits with weights of 5 & 5 and another
had bits of say 8 & 8, then the overall learning potential of the organization can be improved by having
these two employees swap one bit of data.
The 5.5% figure above can be readily verified since only when the weights coincide can a
complete contradiction occur. Thus there are 10 cases to consider: weights for the two bits = 0 0, 1 1, 2
2, 3 3, ... , or 9 9 . In the case where both weights are zero there are 4 bit-value patterns which yield no
information (equivalent to a complete contradiction): 0 0, 1 0, 0 1, or 1 1 . The other 9 cases for weight
patterns each yield a complete contradiction for 2 bit-value patterns: 1 0 or 0 1. Thus there are 4 + 9 x 2
= 22 total instances of no informational value to the agent. This is out of a total possible 10 x 10 x 4 =
400 instances (combinations of 2 weights ranging from 0 through 9 with 4 possible bit value patterns for
each combination). So the probability of the agent being confronted with no informational value from his
2 bits of evidence = 22 / 400 or 5.5%.3 The rest of the possible scenarios for different numbers of bits
per agent and the uniform versus non-uniform weights alternatives are given in Table 2 below.
Table 2.
Number of bits seen by
each Employee (N)
2
3
4
5
n
Uniform Weights
weights equal, from 0 - 9)
(all
55.0%
10.0%
43.75%
10.0%
1/(M+1) if n odd, see (19) if n even
Non-uniform Weights
(weights range from 0 - 9)
5.5%
4.2%
3.6%
3.2%
use Equation 22
If n is even and weights are uniform:
(19)
L( M , n) =
⎛ n ⎞
n
⎜
⎟⋅M +2
⎝ n / 2⎠
2 n ⋅ ( M + 1)
where M is the maximum weight for a single bit of evidence and n is the number of bits.
3This
is of course over the long run, assuming that the weights are randomly distributed within a given range of
values (0 through 9 in our example) and that initially the bits of evidence are randomly assigned to the agents.
22
To explain how the general formula for the non-uniform case was derived we must return to our
formal model. Assume we have a class of acceptable decision functions, where f denotes a function of
degree n with rational coefficients. Also assume that the set of acceptable decision rules is of the form:
(20)
for f ( x ) > 0
⎧1
⎪
sign' ( f ( x1 , x 2 )) = ⎨0
for f ( x ) < 0
⎪undefined for f ( x ) = 0
⎩
where f(x1,x2) = a1x1 + a2x2 + a0 and a0,a1,a2 ∈ Q.
Now if for example a1 = a2 = - a0 then our decision maker will face an uncomfortable decision in two
out of four cases (i.e., when x1 ≠ x2 the decision maker sees completely contradictory data). But how
likely is such a scenario? To answer this question we need to develop a measure of the number of
inconclusive decision rules which exist within our class of acceptable decision functions. Suppose now
that a1,a2 ∈ {0,1,2, ... , M}. This assumption is reasonable in light of the fact that "weights" are often
assigned by business decision makers in terms of scales of discrete values. Furthermore, all ai ∈ Q can
be transformed into ai' ∈ I+ by multiplying our function f by the least common denominator of {a1, ... ,
an}, and by taking the complement of any variable whose weight would otherwise require a negative
value (e.g., if xi =1 represents "adverse weather present" and adverse weather is positively correlated
with a correct decision outcome of 0 then we could simply redefine xi = 1 to represent "adverse weather
not present").
Suppose now that we fix a0 = -((a1+a2)/2). This is done so that f(x1,x2) models a simple
"majority classification" rule (i.e., so that the range of f(x1,x2) is centered about zero). Our measure of
inconclusive decision rules is then simply (M+1) / (M+1)2, since there are M+1 ways for a1 to equal a2
and (M+1)2 total possible combinations for (a1,a2).
Next we extend the case above to include three bits of evidence rather than just two. Suppose
we have a decision maker, Bob, who has three bits of evidence on which to base his recommendation to
his boss. Assume each bit of evidence has an integer weight of importance in the range 0 - M. Here we
23
need to count the number of ways in which 3 coefficients can cancel each other out (i.e., ai + aj = ak).
To that end we can fix one of the 3 coefficients, ak, at each possible value w ∈ {0,1,2, ... , M} and then
count the ways the other two coefficients, ai + aj, can sum to that value w. Thus we now define a new
function f ( n , w ), which is a function that computes the number of ways in which n bits can have their
weights sum to w. Next we develop the general formula for calculating our function.
Proposition V.1:
Consider the set of vectors of positive integer coefficients of length n, whose sum is
equal to some fixed positive integer value w:
n
⎧
⎫
Awn = ⎨(a1 ,..., a n ) | ∑ a i = w, w, ai ∈ I + ⎬
i =1
⎩
⎭
The power of this set of vectors is computed by the formula:
1
for 0 ≤ w ≤ M and n = 1
⎧
0
for w > M and n = 1
⎪
⎪
1
for w = 0 and n > 0
⎪⎪ w
f (n, w) = ⎨ ∑ f ( n - 1, w - i) for w ≤ M and n > 1
⎪ i=0
M
⎪
∑ f ( n - 1, w - i) for w > M and n > 1
⎪
⎪⎩i=max ( 0,w-( n-1)⋅M )
(21)
The lower bound for i in the last case within Equation 21 above (namely i = max (0,w-(n-1)⋅ M ) is
necessary in situations where (n-1)⋅ M < w. For example, consider counting the ways in which 3 bits can
have their weights sum to 19 if each weight can range from 0 to 9 (i.e. M=9). The correct formulation in
this case is:
9
f ( 3, 19 ) = ∑ f ( 2 , 19 − i )
i =1
where we start with i=1 instead of i=0 because the third bit must have a weight of at least 1 since the first
2 bits can at most have their weights sum to 18 (not 19).
24
Returning now to our befuddled decision maker, Bob, assuming M = 9 we see that given 3 bits
of input data there are:
9
∑ f (2, w)
w=0
or 55 decision rules which admit the possibly of completely contradictory data. This is out of 103 total
possible decision rules. See Table 3 for these calculations.
f(n,
n
1
2
0
1
1
1
2
1
2
Table 3
w
3
1
3
4
1
4
1
5
5
1
6
6
1
7
7
1
8
8
1
9
9
1
10
Upon further reflection, we also realize that not all of these potentially contradictory decision rules are
equally troublesome. For example, the decision rule f(x1,x2,x3) = 9x1 + 4x2 + 5x3 - 9 yields
contradictory evidence in only 2 out of 8 cases (i.e., (1,0,0) and (0,1,1)) whereas the decision rule
f(x1,x2,x3) = 5x1 + 0x2 + 5x3 - 5 yields contradictory evidence in 4 out of 8 cases (i.e., (1,0,0), (1,1,0),
(0,0,1), and (0,1,1)). Indeed the rule f(x1,x2,x3) = 0x1 + 0x2 + 0x3 yields contradictory evidence
(actually "no information" in this instance) in all cases.
Thus we can introduce a more refined measure with respect to our contradictory data problem.
This new measure counts the number of ways that the values of bits of evidence can combine with
decision coefficients (i.e., "weights") to yield an inconclusive decision situation. Let us now formalize
this notion.
Consider a set Fn of all linear decision functions of dimension n (i.e., on the vector space Bn)
with its coefficients lying in the set M = {0, ..., M} and its free coefficient (a0) lying in the set {-M, ...,
0}. There is a natural bijection between Fn and Mn+1 defined by g : Fn → Mn+1 : : a1x1+...+anxn+a0
a (a1,...,an,a0). Let now S = Mn+1x Bn be the categorical product of the functional domain and the
binary vector space. Then we define a function App : Mn+1x Bn → b : : a1,...,an,a0,b1,...,bn a g-
25
1(a ,...,a ,a )(b ,...,b )
1
n 0 1
n
which will give us a value of a particular function g-1(a1,...,an,a0) =
a1x1+...+anxn+a0 on the binary vector (b1,...,bn).
where I = { (x1,...,xn,xn+1,...,x2n+1) ∈ Mn+1x Bn | App
(x1,...,x2n+1) = 0 }. Essentially this gives us I as a set of pairs of the form (decision function f, binary
Now let's define set I ⊂ S
vector b) such that f(b) = 0 (i.e., the decision rule f applied to evidence vector b yields an inconclusive
outcome). We then define L (M,n) = |I| / |Mn+1x Bn| . Thus L (M,n) is a volume type of measure on
In+1x Bn. This leads to the following proposition:
Proposition V.2: For the class of linear decision functions of dimension n with coefficients in the set M
= {0, ..., M} and free coefficient (a0) lying in the set {-M, ..., 0} the measure of inconclusive outcomes
is given by the formula:
(22)
L (M,n)
=
n
⋅M
2
⎡ ⎣( n −1) / 2 ⎦ ⎛ n⎞ i⋅ M
2 n + 2⎢
⎢⎣
∑
i =1
⎤ ⎛ ⎢ n + 1 ⎥ ⎢ n ⎥⎞ ⎛ n ⎞ ⎛ ⎛ n ⎞ ⎞
⎜ ⎟ ∑ f (i , w) ⋅ f (n − i , w)⎥ + ⎜ 1 − ⎢
⎥⎦ + ⎢⎣ 2 ⎥⎦⎟⎠ ⎜⎝ n / 2⎟⎠ ∑ ⎜⎝ f ⎜⎝ 2 , w⎟⎠ ⎟⎠
⎝
2
⎝ i ⎠ w =1
⎣
w =1
⎥⎦
2
( M + 1) n ⋅ 2 n
Note that the term (1-⎣(n+1)/2⎦ + ⎣n/2⎦) will become zero for all odd n and 1 for even n.
For example, in our case where n= 3 and M = 9 we have from Equation 22:
L ( M , n) =
⎣2 / 2 ⎦
⎛ 3⎞ i⋅9
2 + 2 ⋅ ∑ ⎜ ⎟ ∑ f (i , w) ⋅ f (3 − i , w)
i =1 ⎝ i ⎠ w = 1
3
(9 + 1) 3 ⋅ 2 3
= 8 + 2 * 3 * [f(1,1)*f(2,1) + f(1,2)*f(2,2) + f(1,3)*f(2,3) + f(1,4)*f(2,4) +
f(1,5)*f(2,5) + f(1,6)*f(2,6) + f(1,7)*f(2,7) + f(1,8)*f(2,8) + f(1,9)*f(2,9)] / 8000
= 332 / 8000 = 4.15%
Thus Bob has a 4.2% chance of seeing completely inconclusive evidence. Applying the above
formulas in a number of cases (n = 2,3,4,5) where ai ∈ {0,1, ..., 9} indicates that as n increases our
measure of inconclusive data decreases as shown in Table 1. Proofs of these formulas are included in
the Appendix.
VII. Conclusion
26
This article represents a continuation of the stream of research which attempts to capture many of the
fundamental aspects of organizational learning within mathematical models. We began with Carley's
(1992) model of this process, extending it into a more formal, mathematical context. In this regard we
provided a formal definition of the key components of the model: organizational learning, organization
structure, and organizational decision functions.
The power of this model is that it is grounded in formal mathematics and is thereby more easily
extensible.
After examining its assumptions, we improved the robustness of the model through the
relaxation of two of these constraints: uniform weights of evidence and data independence. These
changes result in a more generalizable model that can be used to compute the error of classification
between alternative models, calculate a measure of inconclusive decision rules, locate the optimal
decision function for any node in a given organizational structure, and locate the optimal organizational
structure from within a given class of structures, i.e, those defined by the directed graphs in our
mathematical model. Furthermore, the use of binary decision variables offers a firm foundation for the
direct implementation of propositional logic and the construction of more complex relationships.
Researchers have identified several sources of uncertainty in organizations. These include, but
are not limited to task complexity (Perrow, 1984), interdependencies among knowledge or resources
(Vaughan, 1996), organizational politics (Sagan, 1993), human factos (Kohn, Corrigan, and Donaldson,
200), and emergent technology (Aldrisch and Mueller, 1978). In this paper, we have focused on data
interdependencies. We elaborate on its importance in organizations and on its impact on organizational
learning. The other forms of uncertainty could be fruitfully explored using the approach presented here.
Finally, the identification of the effects of inconclusive data and the introduction of data
dependencies via propositional logic both indicate the importance of some form of coordination across
the organizational structure. Uncertainty avoidance can be modeled in terms of bit swapping which
reduces the probability of encountering inconclusive decision rules.
Degrees of task decomposability
can be captured through the introduction of data dependencies. For example, the presence of data bits
27
related by XOR operations that span employees render the overall task less decomposable (i.e. having
only one bit from an XOR pair provides absolutely no informational value).
In such cases the
coordination mechanism would attempt to recognize where these XOR'ed bit pairs occur and reorganize
them under a single employee.
Acknowlegement: We would like to thank the anonymous referees for their insightful comments. They
have helped both in improving the presentation and clarifying the contributions.
28
References
Aldrich, H. and S. Mueller, 1982 The Evolution of Organizational Forms: Technology, Coordination and
Control, Research in Organizational Behavior, 4: 33-87.
Anderson, P., J. Baum and A. Miner (Eds.), 1999. Advances in Strategic Management: Population-Level
Learning and Industry Change, Vol. 16. Elsevier Science Ltd. Amsterdam, The Netherlands.
Argote, L., 1993, Group and Organizational Learning Curves: Individual System and Environmental
Components, British Journal of Social Psychology, 32: 31-51.
Argote, L., S. Beckman and D. Epple, 1990, The Persistence and Transfer of Learning in Industrial
Settings, Management Science, 36: 140-154.
Argote, L., 1999, Organizational Learning: Creating, Retaining and Transferring Knowledge, Kluwer
Academic Publishers, Boston, MA.
Argyris, C. and Schön, D., 1978, Organizational Learning, Addison-Wesley, Reading, MA.
Arrow, K. J., 1974, The Limits of Organization, W. W. Norton & Co, Inc., New York, NY.
Ashby, W. R., 1968, Principles of Self-Organizing Systems, in Modern Systems Research for the
Behavioral Scientist W.Buckley (Ed.), Aldine, Chicago, IL.
Attewel, P., 1992., Technology Diffusion and Organizational Learning: The Case of Business Computing,
Organization Science, 3: 1-19.
Brown, J.S., and P. Duguid, 1991, Organizational Learning and Communities of Practice: Toward a
Unified View of Working, Learning, and Innovation, Organization Science, Feb.: 40-56.
Burton, R. M. and B. Obel, 1998, Strategic Organizational Design: Developing Theory for Application,
Kluwer Academic Publishers, Norwell, MA.
Carley, K. M., 1986, Efficiency in a Garbage Can, Implications for Crisis Management,' in J. March and
R. Weissinger-Baylon (Eds,), Ambiguity and Command: Organizational Perspectives on Military
Decision Making, Pitman, Boston, MA, Ch. 8: 195-231.
29
Carley, K. M., 1990, Coordinating for Success: Trading Information Redundancy for Task Simplicity, in
Proceedings of the 23rd Annual Hawaii International Conference on Systems Sciences, Kona,
Hawaii, Jan.
Carley, K.M., 1992, Organizational Learning and Personnel Turnover, Organization Science, Feb.: 20-46.
Carley, K.M., M.J. Prietula and Z. Lin, 1998, Design versus Cognition: The Interaction of Agent
Cognition and Organizational Design on Organizational Performance,
Journal of Artificial Societies
and Social Simulation, 1(3):1-19. 30 June 1998 at <http://www.soc.surrey.ac.uk/JASSS/>, 1: paper 4.
Carley, K.M., 1999, On the Evolution of Social and Organizational Networks. In Vol. 16 special issue of
Research in the Sociology of Organizations on Networks In and Around Organizations S.B. Andrews
and D.Knoke (Eds.). Greenwhich, CN: JAI Press, Inc. Stamford, CT, pp. 3-30.
Carley, K. M., 2002, Smart Agents and Organizations of the Future, in The Handbook of New Media. L.
Lievrouw and S. Livingstone (Eds.) , Ch. 12 : 206-220, Thousand Oaks, CA, Sage.
Carley, K, M., 2003, Computational Organizational Science and Organizational Engineering, Simulation
Modeling Practice and Theory, 10 (5-7): 253-269.
Carley, K. and A. Newell, 1994, The Nature of the Social Agent, Journal of Mathematical Sociology,
19(4): 221-262.
Carley, K.M. and D.M. Svoboda, 1996, Modeling Organizational Adaptation as a Simulated Annealing
Process. Sociological Methods and Research, 25(1): 138-168.
Carley, K. M. and V. Hill, 2001, Structural Change and Learning Within Organizations. In Dynamics of
Organizations: Computational Modeling and Organizational Theories. A.Lomi and E.R. Larsen
(Eds.), MIT Press/AAAI Press/Live Oak, Boston, MA, Ch. 2; 63-92.
Cohen, M.D., 1991, Individual Learning and Organizational Routines: Emerging Connections,
Organization Science, 135-39.
Cohen, M.D., J. G. March, and J. P. Olsen, 1972, A Garbage Can Model of Organizational Choice,
Administrative Science Quarterly, March: 1-25.
30
Cyert, R.M. and J.G. March, 1963, A Behavioral Theory of the Firm, Prentice-Hall, Englewood Cliffs, NJ.
Daft, R.L., and R.H. Lengel, 1986, Organizational Information Requirements, Media Richness, and
Structural Design, Management Science, 32: 554-71.
Daft, R.L., and K.E. Weik, 1984, Toward a Model of Organizations as Interpretation Systems, Academy
of Management Review, 284-295.
Davenport, T. H., 1997, Information Ecology, Oxford University Press, pp. 91-95.
Dillard, R. A., 1992, Using Data Quality in Decision Making Algorithms, IEEE Expert, Dec.: 63-72.
Drucker, P. F., 1988, Tomorrow’s Restless Managers, Industry Week, April: 18, 25.
Fiol, C. M., and M. A. Lyles, 1985, Organizational Learning, Academy of Management Review, Oct.:.
Galbraith, J., 1973, Designing Complex Organizations, Addison Wesley, Reading, MA.
Garvin, D. A., 1993, Building a Learning Organization, Harvard Business Review, July-August: 78-91.
Granovetter, M.J., 1974, The Strength of Weak Ties, American Journal of Sociology, 78: 1360-1379.
Harary, F., 1969, Graph Theory, Addison-Wesley, Reading, MA.
Huber, G.P., 1991, Organizational Learning: The Contributing Processes and the Literatures,
Organization Science, Feb..
Hutchins, E., 1999, Cognition in the Wild, MIT Pres, Boston, MA.
Johannsen, R. and R. Swigart, 1994, Upsizing the Individual in the Downsized Organization, Addison
Wesley, Reading, MA.
Kim, D.H., 1993, The Link between Individual and Organizational Learning, Sloan Management Review,
Fall: 37-50.
Knuth, D., 1973, The Art of Computer Programming, Vol.3, Addison-Wesley, Reading, MA.
Kohn, L.T., Corrigan, J. M., and Donaldson, M.S. (Eds), 2000, To Err Is Human: Building a Safer Health
System. Institute of Medicine.
Lawrence, P. R., and J. Lorsch, 1967, Organization and Environment: Managing Differentiation and
Integration, Harvard University Press, Boston, MA.
31
Levitt, B. and J.G. March, 1988, Organizational Learning, American Review of Sociology, 14: 319-340.
Levinthal, D.A. and J.G. March, 1993, The Myopia of Learning. Strategic Management Journal, 14: 95112.
Lin, Z. and K.M. Carley, 2003, Designing Stress Resistant Organizations: Computational Theorizing
and Crisis Applications, Kluwer, Boston, MA.
Lindblom, C.E., 1959, The Science of Muddling Through, Public Administration Review, 19: 78-88.
March, J. G., and H. A. Simon, 1958, Organizations, John Wiley, New York, NY.
March, J. G. , 1996, Exploration and Exploitation in Organizational Learning. in Organizational Learning,
M.D. Cohen and L.S. Sproull (Eds.), Sage, Thousand Oaks, CA.
March, J.G., L.S. Sproull, and M. Tamuz, 1991, Learning from Samples of One or Fewer, Organization
Science, Feb: 1-13.
Mihavics, K. and A. Ouksel, 1996a, Learning to Align Organizational Design and Data. Computational
and Mathematical Organization Theory, 1(2): 143-155.
Mihavics, K. and A. Ouksel, 1996b, A Model for the Study of the Effects of Organizational Structure on
Organizational Learning, PhD Dissertation, U.I.C., Chicago, IL,. Supervisor: Aris M. Ouksel
Myer, J. and B. Rowan, 1977, Institutionalized Organizations: Formal Structure as Myth and Ceremony,
American Journal of Sociology, 83: 340-363.
Nelson, R, and S. Winter, 1982, An Evolutionary Theory of Economic Change, Bellhop Press,
Cambridge, MA.
Ouksel, A. M., and J. Watson, 1998, The Need for Adaptive Workflow and What is Currently Available
on the Market: Perspectives from an ongoing industry benchmarking initiative, Workshop on
Computer-Supported Cooperative Work, Seattle, WA.
Ouksel, A.M. and R. Vyhmeister, 2000, Impact of Organizational Design on Organizational Learning:
Robustness of Prior Results, Journal of Mathematics and Computational Organization Theory, 6: 395410.
32
Padgett, J.F., 1980, Managing Garbage Can Hierarchies, Administrative Science Quarterly, 25(4): 583-604.
Perrow, C., 1984, Normal accidents: Living with high risk systems, Basic Books, New York, NY.
Pfeffer, J., 1981, Power in Organizations, Ballinger Publishing Company, Cambridge,MA.
Sagan, S. D., 1993, The Limits of Safety: Organizations, Accidents, and Nuclear Weapons, Princeton
University Press, Princeton, NJ.
Siegel, S., 1957, Level of Aspiration and Decision Making, Psychology Review, 64: 253-262.
Simon, H.A., 1955, A Behavioral Model of Rational Choice, Quaterly Journal of Economics, 69:99-118.
Simon, H. A., 1976, Administrative Behavior 3rd ed, The Free Press, New York, NY.
Simon, H. A., 1981, The Sciences of the Artificial 2nd ed, MIT Press, Cambridge, MA
Steinbruner, J. D., 1974, The Cybernetic Theory of Decision Processes, Princeton University Press,
Princeton, NJ.
Stinchcombe, A. L., 1990, Information and Organizations, University of California Press, Berkeley, CA.
Thompson, J.D., 1967, Organizations in Action, McGraw Hill, New York, NY.
Tyre, M.J., and E. Von Hippel,1997, The situated nature of adaptive learning in organizations.
Organization Science, 8: 71-84.
Tomasko, R.M., 1993, Rethinking the Corporation: The Architecture of Change, AmaCom.
Tushman, M. and D. Nadler, 1978, Information Processing as an Integrating Concept in Organizational
Design, Academy of Management Review, July: 613-624.
Vaughan, D., 1996, The Challenger launch decision: Risky technology, culture, and deviance at NASA.
University of Chicago Press, Chicago, IL.
Williamson, O. E., 1975, Markets and Hierarchies: Analysis and Antitrust Implications, Free Press, New
York, NY.