2. series expansion method of frequency response function

A IMPROVED SERIES EXPANSION METHOD OF FREQUENCY
RESPONSE FUNCTION UNDER MEDIUM AND HIGH FREQUENCY
EXCITATIONS
Wei Ning, Jing-Hui Zhang, Jun Wang
School of Aerospace, Xi’an Jiaotong university
Xi’an, China,
Email: ningweixjtu@stu.xjtu.edu.cn
ABSTRACT: Aiming at the computational divergence in the series expansion method of frequency response function under medium and high frequency excitations, a new improved algorithm for dynamics system response is proposed. The frequency response function of truncated high order modes is expanded by the application of Taylor series on the basis of power series expansion and modal superposition method. According to coupling characteristics between low order and high order modes, the contribution of truncated high order modes to the frequency response function is expressed as the low order mode matrix and system matrix. The results show that the improved algorithm expands the series expansion method to the range of high frequency excitations and the calculation accuracy of the frequency response function is improved under the non-complete modal conditions.
Numerical results validate that this method is feasible and has a good convergence.
1. INTRODUCTION
The modal analysis method is often used to analyze the response of a complex structure with a large number of degrees of freedom. In general, determination of the structure response adopts modal superposition method (MSM) in which the frequency response function is expressed as the summation of all modes in the model. However, it is very difficult to calculate all the eigenpairs, eigenvalues and the corresponding eigenvectors, of a large model.
In fact the mode truncation scheme is generally utilized by retaining the low order modes and truncating its high order modes for linear structure. The calculation accuracy of this analysis method relies on two conditions: the number of low order modes retained and the relation between structure nature frequencies corresponding to low order modes and excited frequencies. When the excited frequency lies in or closed to low order modal frequency range, the calculation accuracy is satisfied. With the increasing excited frequency, the error increases. The main reason is that the high modes are truncated and the contribution of high modes to structure response is neglected.
Methods that attempt to improve the truncated structure response are: the mode-acceleration method (MAM) [Maddox, 1975; Heng and Mackie, 2008; Pradlwarter and Schueller, 2005;
Leger and Wilson, 1988; Kulkarni and Ng, 1992], the dynamic correction method (DCM)
[Borino and Muscolino, 1986] and the force derivative method (FDM) [Camarda et al, 1987;
Akgun, 1993]. These methods take into considering the contribution of the truncated high order modes. Mode-acceleration method evaluates the approximate model contribution of the truncated modes to the response in a pseudo-static form and neglects the nodal response of both velocity and acceleration terms. Dynamic correction method evaluates the approximate model contribution as the difference between the particular solutions of the differential equation. Force derivative method evaluates the pseudo-static approximate contribution to the
nodal response by considering high order time derivatives of the forcing function. All methods consider the effects of the truncated modes. However, the relation between modal frequency available and excited frequencies is not considered which is important to obtain the accurate solution under medium and high frequency excitations.
Ref. [Liu et al, 1993; Qu, 2007] presented a hybrid method to improved the solution accuracy of the MSM and MAM. The method evaluates the contribution of the high order truncated modes to the response by a convergent power series. However, the hybrid method does not contain the situation the low order vibration modes are retained with the high order modes unavailable when structure is subjected to high frequency excitation in which the calculation results by the method developed in Ref. [Liu et al, 1993] would not be of convergence and the response error is not satisfied by MAM, DCM and FDM in the high frequency range.
In this paper a method that is able to give the corrected improved response in the mentioned situation is presented. The method expresses the solution into two parts: the solution from
MSM of the available modes and the contribution of the truncated modes to the response. the contribution of the truncated modes is explicitly expressed in the form of a convergent power series . The relation between modal frequency available and excited frequencies is considered that ensures this method converges to an accurate solution using few modes with little extra computational effort, especially in the high frequency range.
2. SERIES EXPANSION METHOD OF FREQUENCY RESPONSE FUNCTION
The dynamic equilibrium of an n-degree-of-freedom system in time domain is generally given by
( )
( )
( )
(1) where
M
R
and
K
R n n are real symmetric mass and stiffness matrices.
( ) respectively, the displacement and exciting force vectors. and ( ) are,
When the modal summation method is used, one can obtain in the modal space
X
j n
1
T j j
j
2
F (2) where
j
and
j
( j= 1,2,…,n) are the j th eigenvalue and j th eigenvector associated with
j
of the following eigenproblem,
K
j
M
j
0 (3)
j
T
M
j
1 (4) where superscript T denotes matrix transpose. Assume the eigenvalue and eigenvector matrices of the model diag
2
n
R and
2
, ,
n
]
R . where
is in j order of ascent, i.e.
1
2
n
.
and
satisfy the following eigenequation and orthogonalities
K
M
(5) where I is an identity matrix.
K
T
M
I
(6)
(7)
For large scale system, in most case, only a few of the low order modes are calculated while the high order modes are truncated. Assuming that the first L ( L << n ) modes are available with the other n-L modes truncated, then Eq. (2) can be approximated written as
X
L
j l
1
j
T
2
F (8)
Because Eq. (8) does not take the contribution of the truncated high frequency mode to response into account, the solution of Eq. (8) might be inaccurate in some circumstances.
Separating the right side of Eq. (2) in terms of the available modes and high unavailable modes, Eq. (2) can be rewritten as
X
X
L
X
H
(9) where X
H
represents the contribution of the truncated high frequency mode to the solution
X .
X
H
n j l 1
j j
T
j
2
F (10)
Assume
L
is an available low order mode matrix,
L
is an available diagonal eigenvalue matrix corresponding to the available mode matrix.
H
is an unavailable high order mode matrix,
H
is an unavailable diagonal eigenvalue matrix corresponding to the unavailable mode matrix
H
. Eq. (8) and Eq. (10) can be rewritten as
X
L L L
2
I )
1 T
L
F (11) and
X
H H H
2
I )
1 T
H
F (12)
In fact, the inverse of matrix (
Eq. (12) can be rewritten as
2
I ) in Eq. (12) may be expanded as a power series, so
X
H
H
( k
0
2 k k 1
H
)
T
H
F (13)
X can be obtained by the low order mode matrix
H
L
Convergence of Eq. (13) must satisfy the condition of
2 l
and the eigenvalue matrix
.
.
L
Unfortunately , the convergence condition can’t always be met when structures are subjected to broad band random excitations such as road excitations and acoustic excitations. This paper tries to extend the method to the medium frequency and high frequency range.
3. NEW IMPROVED METHOD
As mentioned above, the series expansion method do not consider the relation between the retained modal frequency and excited frequency and is only suitable for low frequency excitations in Ref. [Liu et al, 1993]
3.1. High frequency excitations
Consider the situation that structures are subjected to high frequency excitations and lower limit frequency of excitations exceeds the highest available modes frequency. Eq. (13) can’t satisfy the convergence condition. (
2
I )
1
of Eq.(12) can be expressed as the power series:
(
2
1
)
k
0
k
2( k
1) (14)
Substituting Eq. (14) into Eq. (12) yields
X
H
k
0
H
k
T
H
2
F
Eq. (15) can also be rewritten as where A k
H
(
H
) k T
H
and
2
.
X
H
k
0
A k
k 1
F
(15)
(16)
Considering orthogonal property of modal matrix and mass matrix, one obtains
M
1 T
H
A
0
M
1 T
L L
From Eq. (7) one obtains
Both sides of Eq. (19) multiplied by KM
1
M
1 T
KM
1
yield k
M
1
KM
1
KM
1
=
T k
(17)
(18)
(19)
(20)
Partitioning the right sides of Eq. (20) in terms of available modes and unavailable modes, one obtains
1
M KM
1 k
KM
1
L L
) k
L H H
) k T
H
(21)
Therefore, one gets
A k
Y k
z k
(22) where
Y k
M
1
KM
1
KM
1 k z k
L L
) k T
L
(23)
(24)
Substituting Eq. (22) into Eq. (16), the contribution of the truncated high frequency modes to the solution can be obtained under high frequency excitations.
3.2. Medium Frequency Excitations
When
l
1
2 n
, excitation frequency lies in the medium range. Considering Eq.
(7) and the eigenvalue shifting technique, one can obtain
( K
M )
M
I ) (25)
( K
M )
T
(
I )
1
(26) the contribution of the truncated high frequency modes to the solution in the medium frequency excitation range can be obtained
X
H
k
0
A k
k 1
F (27) where
A k
H
I
k T
H
(28)
2
(29)
To satisfy the convergence condition, the eigenvalue shifting value relational expression
should meet the
i
, i l 1, l
2, , n
From Eq. (17) one obtains
A
0
H H
Both sides of Eq. (19) multiplied by ( K
)
1
M
1 T
L
( K
) k
1 yield
(30)
M
1 ( K
)
1 ( K
)
1
I ) k
T
(31) k
So A k
can be obtained as
A
k
Y k
z
k
(32) where
Y k
M
1 ( K
) z
k
L L
1 ( K
) k
I ) k T
L
1 (33)
(34)
When the appropriate shifting value is specified, the contribution of the truncated high frequency mode to structure response can be obtained by means of mass matrix M , stiffness matrix K , low order mode matrix
L and eigenvalue matrix
, the contribution of the
L available low order mode to structure response can be obtained by mode superposition method.
4. NUMERICAL EXAMPLE
Considering a ten DOF undamped mass-spring system, shown in Fig. 1, with its parameters given by: M
1
M
2
M
9
4 kg , M
10
2 kg ,stiffness coefficient K
8
N m .
K K K K K K
M
1
M
2
M
3
M
4
M
5
K K K K K
M
6
M
7
M
8
M
9
M
10
Fig 1.A ten DOF undamped mass-spring system
The results of modal analysis show that the lowest mode frequency is 227.3 Hz and the highest mode frequency is 1748.6 Hz.
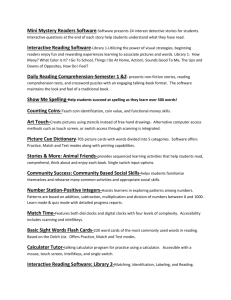
The excitation force, illustrated in Fig 2, with its amplitude equal to 1.0 acts on the fourth mass. The excitation frequency band range is 200 Hz~7000 Hz. Because partial band excitation frequencies exceed the highest mode frequency for the system, the convergence condition can not be satisfied and the calculation results tend to divergence by the method in
Ref [ Liu et al, 1993 ]. For the purpose of comparison, taking the fourth DOF as example, the response of the fourth DOF is computed using the three methods, exact solution (mode superposition method without modal truncation), mode superposition method (with the first three modes and the first five modes available) and the present method, respectively. The response in the present method is calculated with the first mode available and the first two terms retained in Eq. (15) and Eq. (27).The calculation results are shown in Fig 3. The error of mode superposition method increases with the decreasing available mode number in the medium and high frequency range. The curve in Fig. 3 confirms that the solution accuracy of the present method is much higher than that of the traditional mode superposition method even if only one mode is adopted to calculate the response.
1.5
10
-5
10
-6
10
-7
Exact solution
MSM-3
MSM-5
Present method
1
10
-8
10
-9
0.5
0 2000 4000
Frequency /Hz
6000 8000
10
-10
10
2
10
3
Frequency /Hz
10
4
Fig 3. Response Computed Using Different Methods Fig 2. Excitation Force
5. CONCLUSION REMARKS
An improved series expansion method for dynamical system response under medium and high frequency excitations is proposed. First, structure modes are divided into low order modes available and high order modes truncated. The contribution of low order modes to the response can be obtained by mode superposition method. Second, the contribution of the truncated high frequency mode to the solution can be expressed by low order mode matrix
L
, the eigenvalue matrix
L corresponding to low order mode matrix and system matrix.
The present method considers the relation between structure nature frequency and excitation frequency. When structure is subjected to medium frequency excitations, the eigenvalue
shifting technique is adopted. The present method can give accurate solution with little extra computational cost. Especially in the non-complete modal condition, the present method can avoid to solve all modal information and provide the accurate solution which is useful for multi-DOF structure. Numerical results validate that the method is feasible and has a good convergence.
REFERENCES
Akgun M.A. A new family of mode-superposition methods for response calculations. Journal of Sound and Vibration, 167; 2; 1993 p. 289-302.
Borino G, Muscolino G. Mode-superposition methods in dynamic analysis of classically and non-classically damped linear systems. Earthquake Engineering and Structural Dynamics. 14;
5; 1986 p. 705-717.
Camarda C.J, Haftka R.T. and Riley M.F. An evaluation of higher-order modal methods for calculating transient structural response. Computers and Structures, 27, 1987, p. 89-101.
Heng B.C.P, Mackie R.I. Parallel modal analysis with concurrent distributed objects,
Computers and Structures . ,2008 p.1-15. doi:10.1016/j.compstruc.2008.06.002.
Kulkarni S.H, Ng S.F. Inclusion of higher modes in the analysis of non-classically damped systems. Earthquake Engineering and Structural Dynamics,.21; 6; 1992 p. 543-549.
Leger P, Wilson E.L. Modal summation methods for structural dynamic computations.
Earthquake Engineering and Structural Dynamics, 16; 1; 1988 p.23-27.
Liu Z.S., Chen S.H, Zhao Y.Q. Modal truncation and the response to harmonic excitation.
ACTA AERONAUTICA ET ASTRONAUTICA SINICA, 14; 9; 1993 p. 537-541.
Maddox N.R. On the number of modes necessary for the accurate response and resulting forces in dynamic analyses. Journal of Applied Mechanics, ASME, 42; 1975 p.516-517.
Pradlwarter H.J, Schueller G.I. A consistent concept for high-and low-frequency dynamics based on stochastic modal analysis.
Journal of Sound and Vibration , .288; 3; 2005, p. 653-
667.
Qu Z.Q. Adaptive mode superposition and acceleration technique with application of frequency response function and its sensitivity.
Mechanical Systems and Signal Processing .
21; 1; 2007 p.40-57.