Branch Prediction using a Correlating Feature Selector / Dynamic
advertisement

Branch Prediction using a Correlating Feature Selector /
Dynamic Decision Tree
Cindy Jen, Steven Beigelmacher
Electrical and Computer Engineering Department
Carnegie Mellon University
Pittsburgh, PA 15213 USA
{cdj, steven7}@andrew.cmu.edu
Abstract
As the accuracy of branch prediction becomes an increasingly
important factor in modern processor performance and storage
requirements of current branch predictors continue to rise, it is
important that we develop an accurate branch predictor whose
storage requirements do not explode as more branch prediction
features are considered. The storage requirement for current
table-based hardware predictors grows exponentially with the
number of features used in making branch prediction. We seek a
branch prediction method that can consider a large number of
features, without exhibiting that exponential growth in size. In
this paper, we describe our implementation of a correlating
feature selector for branch prediction. The correlating feature
selector is implemented in the form of a dynamic decision tree,
which is a binary tree of decision-maker nodes. We use tracedriven simulation (SimpleScalar’s sim-bpred) results to show that
the CFS/DDT predictor is the most efficient, in terms of accuracy
for a given storage requirement, when correlating on local
history, global history, and the lower eight bits of each of the 32
architectural integer registers. The ability of the dynamic
decision tree to use more features for prediction without a gross
increase in size is what led us to be able to correlate on register
values, which turned out to be quite useful in predicting branch
outcomes. We also use out-of-order processor simulation
(SimpleScalar’s sim-outorder) to evaluate the CFS/DDT’s
accuracy when instructions are executed out of order, rather than
in a sequential, non-overlapping manner. CFS/DDT accuracy
results are compared to the accuracy of the commonly used
tournament predictor, modeled after that in the Alpha EV6. We
investigate and discuss why the CFS/DDT predicts significantly
better with trace-driven simulation than with out-of-order
simulation.
Modern branch prediction implementations rely on a two-level
table, maintaining a limited history of previous local and global
branch outcomes to predict the result of the current branch.
Because these table-based approaches do not know which history
bits of the entire set are strongly tied to a given branch, the entire
history vector must be considered for a given branch. As a result,
storage requirements grow exponentially with each bit of
additional history. Due to the explosive growth in storage
requirements, most table based branch predictors neglect to take
into account other factors (such as register values) that are likely
strongly correlated to the branch outcome. We seek a branch
prediction implementation that selectively pays attention to
relevant feature bits for each branch, thereby reducing storage
requirements as the total number of feature bits grow, in turn
allowing us to consider more features.
We have implemented a correlating feature selector using a
dynamic decision tree that dynamically determines which features
correlate more strongly to each branch and uses those features for
future predictions. We show that the use of this CFS/DDT saves
storage space, allowing the use of other features in addition to
local and global history bits. We then show that the addition of
register values as features to consider in branch prediction
increases accuracy over local/global tournament predictors of the
same size. Next, we consider the implications of stale data in an
out of order processor, and investigate ways to overcome this
problem and achieve the benefits of the CFS/DDT’s extra feature
storage space.
This paper consists of five sections. Section 2 examines previous
work in branch predictors. Section 3 introduces CFS/DDT and
discusses its implementation. Section 4 presents our experimental
methodology and results. Section 5 offers concluding remarks.
2. Previous Related Work
1. Introduction
Branch prediction is an essential component of modern highperformance microprocessors.
As pipelines grow deeper,
branches do not get resolved until further into the pipeline. As a
result, mispredictions become more costly since a greater number
of wasted cycles occur in between the branch prediction and
branch resolution. Additionally, as superscalar processors grow
wider and integer programs on average continue to show branches
once every six instructions, more speculative execution is needed
to keep functional units busy. As speculative paths branch to
deeper speculative paths, the prediction accuracy drops off
exponentially, making the problem more severe. These trends
motivate development of an accurate branch prediction scheme.
The two-level adaptive training branch predictor, proposed by
Yeh and Patt[1], uses two levels of branch history information to
make predictions. The first level contains the history of the last n
branches, while the second level contains the branch outcome for
the last s occurrences of the branch matching the global pattern.
Variations exist regarding whether the two levels are unique to
each branch instruction or shared. Per-address structures were
found to be most accurate due to the removal of interference
between different branches, but at the cost of storage
requirements. The most efficient implementation for a target
branch accuracy was found to be PAg, where the two major
structures are a per-address history register table, which contains
the most recent global history bits, and a global pattern table,
which contains the most recent branch results for the content of
the history register. Several finite state machines are used for
updating pattern history bits, and allow the predictor to adjust to
the current branch behavior of the program. The predictor
achieved an average prediction accuracy of 97 percent on nine
SPEC benchmarks. Other techniques were simulated in that study
as well, including static training predictors, branch target buffer
designs, always taken, backward taken, etc, and the two-level
adaptive training branch predictor achieved about 4 percent better
prediction accuracy than other predictors.
Heil, Z. Smith and J. Smith[2] examined correlation between
branch outcome and data values in their paper on improving
branch predictions. After examining a sampling of branches that
exhibited unusually high mispredict rates, the authors determined
that the local and global history alone was not enough to yield a
good prediction for certain types of branches. The authors
believed that these branches could be predicted relatively easily if
the values tested by the branch instruction could be included as
part of the prediction. To that end, they implemented a branch
difference predictor (BDP), which stores the difference of the two
branch source register operands (the authors included a special
case for handling MIPS instructions like “set”). This value is then
used as part of their prediction mechanism along with the branch
address and global history. Additionally, the authors devised a
method of decrementing counters used to measure the “staleness”
of a stored difference value, taking into account that a branch may
be issued in an out of order processor before the data difference
on which it depends has been resolved. These counters were a
way of letting the predictor know how far beyond the last known
difference value the current branch instruction was. In comparing
their BDP implementation against gshare and Bi-Mode predictors
running selected benchmarks from SPEC95, Heil et al found a
mispredict improvement of up to 33% over gshare and 15% over
Bi-Modal.
While much work has been spent on improving the basic twolevel prediction scheme mentioned above, there has also been
research in applying new techniques to branch prediction.
Numerous solutions have been suggested that are based off of
extensions to the field of machine learning.
Jimenez and Lin[3] borrowed from neural networks when they
proposed using perceptrons in dynamic branch predictions. These
perceptrons essentially consisted of a vector of input units
connected to a single output unit by weighted edges. In their
implementation, the individual inputs are driven by the global
branch history shift register, and each input is either a –1 (for
branch not taken) or 1 (for branch taken). The weighting factors
for each input indicate the strength of correlation between that
input bit and the output prediction. The output is the result of
summing the weighted input bits. A negative output results in a
prediction of not taken; otherwise the branch is predicted to be
taken. Once the branch is resolved, the perceptrons are said to be
trained, whereby the input bits that predicted correctly have their
weight incremented, and mispredicting input bits have their
weights decremented. The authors showed that their perceptron
predictor scaled linearly with the history size, thereby enabling
more history to be considered than a table-based approach for a
given hardware budget. In addition, they improved misprediction
rates by 10.1% over a gshare predictor running SPEC 2000
benchmarks.
Previous work by Loh and Henry[4] to improve branch prediction
involved the idea of ensemble branch prediction, where a master
expert uses individual predictions made by a collection of
different algorithms to make a final prediction. The master expert
uses a weighted majority algorithm to analyze the individual
predictions and decide what outcome to predict. As individual
predictors make correct predictions, their weight increases, and as
they make incorrect predictions, their weight decreases. In
addition, each branch address corresponds to its own set of
predictor weights. This method was found to reduce branch
mispredictions by about 5%-11%.
3. Design and Implementation Details
3.1 Overview
In this section we will present the algorithm used in our
correlating feature selector/dynamic decision tree, which was first
proposed by Fern et. al.[5]. Correlating feature selection is
capable of keeping track of a large number of features, while
selecting the most relevant features from a feature set to use in
predicting the outcome of each branch. We use a dynamic
decision tree (DDT) predictor, borrowed from the idea of decision
trees used in machine learning, to implement correlating feature
selection. The predictor operates in two modes: an update mode
and a prediction mode. In the update mode, a feature vector/target
outcome pair is used to update internal state. The feature vector is
an array of bits representing all the possible features to use in
predicting branch outcomes. The target outcome is simply the
branch outcome corresponding to the feature vector it is paired
with. These data are fed to the predictor so that it may learn from
each branch, and become more accurate with time and training.
In the prediction mode, an input feature vector is used along with
the dynamic decision tree to predict the outcome of the current
branch.
The number of trees used in the algorithm is
parameterizable, and the lower order bits of each branch address
are used to map each branch to its tree. The root node of the
decision tree uses the most highly predictive feature (feature that
correlates most strongly to the branch outcome), and nodes at
each subsequent level of the tree use the most highly predictive
feature of all the remaining features. The features used in the Fern
et. al. predictor were 64 history bits, composed of 32 local and 32
global bits. We propose to build upon the DDT predictor idea by
using additional predictive information in the form of register
values. In Section 4, we describe in detail the need to use register
bit values in addition to branch history bit values. The rest of this
section provides implementation details for our correlating feature
selector/dynamic decision tree.
3.2 Feature Selection
A predictor that forms rules based on the principle of using only a
small set of carefully selected features is said to perform feature
selection [5]. For each branch, the CFS/DDT selectively uses the
most relevant features to predict the branch outcome, while
ignoring irrelevant features. The ability of our branch predictor to
dynamically determine which features correlate most strongly to
branch outcomes for each particular branch is the key behind its
relatively low storage requirements. Feature selection is carried
out within the dynamic decision tree, whose implementation is
described below.
3.3 DDT Updating
The update mode is the more complex of the two DDT modes. In
this mode, the values of all the features used at the time of a
branch’s outcome prediction are used in combination with the
actual branch outcome result to update the necessary nodes in the
tree for that particular branch address. Each node contains an 8bit counter for each feature. The magnitude of each counter
represents the strength of the correlation between the feature and
the true branch outcome (more positive for strong positive
correlation, more negative for strong negative correlation) at its
particular node. In update mode, all nodes used to make the
branch prediction are updated. The feature bits are compared to
the branch outcome, and counters at the updated nodes are
incremented for a match, and decremented for a mismatch. If any
counter saturates, all counters are halved to preserve relative
strengths. In addition to updating its own feature counters, each
updated node must also activate its selected child node to update
the child’s feature counters as well. In this manner, the path of
selected prediction nodes for the particular branch address is
updated from the root node down.
Special features to note are the constant feature and the subtree
feature. These features each have a correlation counter as well.
The constant feature is just a ‘1’ bit, and it exists to account for
the case where a branch heavily favors a particular constant
outcome. It is important for the case where a node encounters a
stream of feature values/target outcome pairs with nearly uniform
branch outcomes. The subtree bit represents the prediction of the
selected child node. It is not used for prediction, but is used to
learn whether a prediction should be made locally at a node, or
the prediction should be made based on the selected child node’s
prediction.
At each updated node, the updated feature counters are compared,
and the feature counter (excluding constant and subtree) with the
largest magnitude is set as the splitting variable for the node,
among the features that have not been selected as the splitting
variable by any of the parent nodes. This splitting variable is the
most predictive of all the features at that node that may be used as
the splitting variable. If the constant or subtree features have
larger magnitudes than the splitting feature, a special use-constant
or use-subtree bit is set (use of these bits described further in
Section 3.4).
3.4 DDT Predicting
In predict mode, node values set in the update mode are used in
combination with a set of input features to predict a branch
outcome. Prediction starts at the root node of the branch
address’s tree, and continues down the tree as necessary. At each
node, if the use-constant bit is set, a prediction is made for taken
or for not taken, based upon the sign of the constant feature
counter (positive for taken, negative for not taken). If the usesubtree bit is set, the prediction of the child node (selected based
on the splitting feature value) is used. If neither of these bits are
set, the splitting feature value is used to make a branch outcome
prediction (1 for taken, 0 for not taken).
3.5 Implementation Parameters
In our implementation, the number of dynamic decision trees and
the maximum depth of each tree are parameterizable. Increasing
either value raises prediction accuracy, but at the cost of increased
storage requirements. We map a branch instruction to a decision
tree based on the lower-order bits of the branch instruction’s
address.
4. Experimental Methodology and Results
4.1 Initial Evaluation Environment
For our initial evaluation of branch prediction schemes we used
the sim-bpred simulator from SimpleScalar. Sim-bpred has the
advantage of being a fast trace-driven simulator. Furthermore it
operates on one instruction at a time to completion, so that an
instruction is read, executes, and updates system state without
overlapping with other instructions. Thus, when any instruction
begins, all previous instructions have updated system state.
This environment provides a best case scenario with respect to
known system state in which we could evaluate different branch
predictors, without the artifacts of out-of-order processing. Our
goal was to use sim-bpred to determine what aspects of system
state correlated most strongly to branch outcomes for a simplified
processor model.
4.2 Tournament Predictor
The first step in our investigation was to employ a commonly used
branch predictor to provide us with accuracy measurements to
compare our results against. We used a tournament predictor,
modeled after the predictor used in the Alpha EV6 [6]. The
tournament predictor chooses between a local and global predictor
on a per-branch basis. The tournament predictor was evaluated in
SimpleScalar using the built in “combined” branch prediction
scheme.
4.3 CFS/DDT Features -- Local and Global
History Bits
The CFS/DDT proposed by Fern et. al. [5] used only history bits
as features on which to correlate branch outcomes. They used 32
bits of local history and 32 bits of global history. The local
history represents the last 32 branch outcomes for a specific
branch. The global history represents the last 32 branch outcomes
on all branches in the program. Our first step in creating a
CFS/DDT implementation was to recreate the predictor
implemented by Fern et. al., and thus only correlate on local and
global history bits.
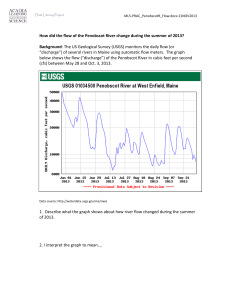
Our initial comparison is between a tournament predictor and the
CFS/DDT predictor operating on only 64 features (32 bits global
history, 32 bits local history). Simulations were run on the SPEC
2000 benchmarks gcc, twolf and parser. We chose integer
benchmarks rather than floating point benchmarks because their
branch behavior tends to be more unpredictable.
Our initial CFS/DDT was obviously outperformed by the
tournament predictor, so we set out to find more features to
correlate upon.
0.1000
0.0900
0.0800
Mispredict Rate
0.0700
4.4 CFS/DDT Features -- Register Values
0.0600
gcc CFS/DDT (hist)
0.0500
gcc TOURN
0.0400
0.0300
0.0200
0.0100
0.0000
256_0
256_1
256_3
256_5
512_5
Equivalent Tree Configuration for Predictor Size (#Trees_Depth)
0.1400
0.1200
Mispredict Rate
0.1000
0.0800
twolf CFS/DDT (hist)
twolf TOURN
0.0600
0.0400
0.0200
0.0000
256_0
256_1
256_3
256_5
512_5
Equivalent Tree Configuration for Predictor Size (#Trees_Depth)
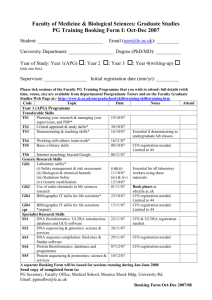
Next, we investigated adding additional features to see how well
they would improve the performance of the baseline CFS/DDT
predictor. Since branches operate based on comparisons of
register values, correlating on the values of the registers seemed
like a natural choice. We initially added the lower 8 bits of each
of the 32 general purpose integer registers to the CFS/DDT
feature set. We feel that the majority of branches are based on
very small numbers, especially compare to zero or compare to
one. Hence, we decided to try correlating on the lower bits of the
register. However, loop termination branches often compare
against some moderately larger values, and thus the lowest bit
alone would not be enough. We felt 8 bits would be large enough
to capture the correlation on most of these compares.
The graphs in Figure 2 show simulations of the same three integer
SPEC 2000 benchmarks used in Figure 1, where the previous
results are compared to the performance of the new CFS/DDT
implementation that correlates on 64 bits of history and 8 bits of
data per register. It should be noted that for the different
configurations of maximum number of trees and maximum tree
depth, the total storage requirement of the CFS/DDT
implementation changes. For each configuration the tournament
predictor is sized such that the total storage requirement is
comparable to the size of the CFS/DDT predictor it is being
compared to.
0.0700
0.1000
0.0900
0.0600
0.0800
0.0500
parser CFS/DDT (hist)
parser TOURN
0.0300
0.0200
Mispredict Rate
Mispredict Rate
0.0700
0.0400
0.0600
gcc CFS/DDT (hist)
0.0500
gcc CFS/DDT (reg8)
gcc TOURN
0.0400
0.0300
0.0100
0.0200
0.0100
0.0000
256_0
256_1
256_3
256_5
512_5
Equivalent Tree Configuration for Predictor Size (#Trees_Depth)
0.0000
256_0
256_1
256_3
256_5
512_5
Equivalent Tree Configuration for Predictor Size
(#Trees_Depth)
Figure 1 shows the mispredict rates of the tournament predictor
and our baseline CFS/DDT predictor for our three integer
benchmarks. Five CFS/DDT configurations are run for a different
number of trees and a different maximum tree depth.
Figure 1
We see that in all benchmarks across all configurations the
tournament predictor performs better than the baseline CFS/DDT
implementation. The difference in mispredict rate ranges from
5.62% to 1.66%, with the tournament predictor on average
mispredicting 3.08% fewer times.
4.5 Correlating On Entire Registers
0.1400
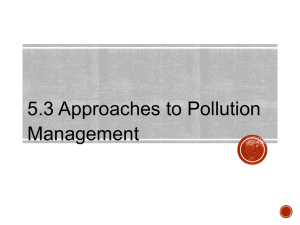
We next investigated what would happen if we correlated on 32
bits of each of the 32 integer registers rather than just the lower 8
bits.
0.1200
Mispredict Rate
0.1000
0.1000
0.0800
twolf CFS/DDT (hist)
twolf CFS/DDT (reg8)
0.0900
twolf TOURN
0.0600
0.0800
0.0700
Mispredict Rate
0.0400
0.0200
0.0000
256_0
256_1
256_3
256_5
0.0600
gcc CFS/DDT (hist)
0.0500
gcc CFS/DDT (reg8)
gcc CFS/DDT (reg32)
0.0400
512_5
0.0300
Equivalent Tree Configuration for Predictor Size
(#Trees_Depth)
0.0200
0.0100
0.0700
0.0000
256_0
0.0500
256_3
256_5
512_5
0.1400
0.0400
parser CFS/DDT (hist)
0.1200
parser CFS/DDT (reg8)
parser TOURN
0.0300
0.1000
Mispredict Rate
Mispredict Rate
256_1
Tree Configuration (#Trees_Depth)
0.0600
0.0200
0.0100
0.0000
0.0800
twolf CFS/DDT (hist)
twolf CFS/DDT (reg8)
twolf CFS/DDT (reg32)
0.0600
0.0400
256_0
256_1
256_3
256_5
512_5
Equivalent Tree Configuration for Predictor Size
(#Trees_Depth)
0.0200
0.0000
256_0
Figure 2
In examining the results of the gcc and parser benchmarks, we see
that the tournament predictor initially performs better than the
new CFS/DDT implementation. However as total storage size
used by the branch predictor increases, we see that the difference
between CFS/DDT and the tournament predictor decreases. By
512 trees with a maximum depth of 5 nodes, the CFS/DDT
implementation outperforms the tournament predictor for these
two benchmarks as well. The CFS/DDT branch predictor appears
to gain more accuracy as storage size increases than does the
tournament predictor. Thus, we conclude that the CFS/DDT
predictor is able to store more relevant information and predict
branch outcomes more accurately than the tournament predictor
with a moderate amount of predictor storage available.
256_3
256_5
512_5
Tree Configuration (#Trees_Depth)
For all benchmarks and all configurations the CFS/DDT
correlating on history and 8 bits of data per register performs
better than the baseline CFS/DDT implementation.
The
difference in mispredict rates range from 6.79% to 1.76%, with an
average difference of 3.78%.
0.0700
0.0600
0.0500
Mispredict Rate
The enhanced CFS/DDT implementation also outperformed the
tournament predictor across all configurations of the twolf
benchmark. The difference in mispredict rates range from 4.13%
to 2.49% with an average difference of 3.26%.
256_1
0.0400
parser CFS/DDT (hist)
parser CFS/DDT (reg8)
parser CFS/DDT (reg32)
0.0300
0.0200
0.0100
0.0000
256_0
256_1
256_3
256_5
512_5
Tree Configuration (#Trees_Depth)
Figure 3
Figure 3 shows a comparison of the three flavors of CFS/DDT
predictors (history only, history and lower 8 bits of each register,
history and full 32 bits of each register). The simulation results
reveal that adding the lower 8 bits of each register value to the
feature set increases prediction accuracy on average by 3.78%
(over a feature set of only history bits). Adding all 32 bits of each
register value to the feature set increases prediction accuracy on
4.6 Evaluating CFS/DDT in an Out of Order
Simulation Environment
To this point, we have only simulated our CFS/DDT using
SimpleScalar’s sim-bpred, which is a trace-driven simulation
environment with no real notion of a CPU. However, if we want
to test our branch predictor in a realistic processor simulation
environment, sim-bpred is not sufficient.
0.1800
0.1600
0.1400
Misprediction Rate
0.1200
0.1000
twolf CFS/DDT (bpred)
twolf CFS/DDT (outorder)
0.0800
0.0600
0.0400
0.0200
0.0000
256_0
256_1
We first ported over a naive version of the branch prediction code
over to sim-outorder, with minimal changes to the code. As stated
previously, we used the CFS/DDT whose feature set consists of
64 bits of history and the lower 8 bits of each register value.
Figure 4 compares the accuracy of our CFS/DDT in sim-bpred vs.
in sim-outorder.
0.1000
0.0800
parser CFS/DDT (bpred)
parser CFS/DDT (outorder)
0.0600
0.0400
0.0200
0.0000
512_5
We simulated the tournament predictor in sim-outorder as well, to
see if the tournament predictor would lose as much accuracy as
our CFS/DDT predictor. We also wanted to compare the
tournament predictor’s accuracy to our branch predictor in the
out-of-order execution environment.
0.1600
Mispredict Rate
Misprediction Rate
gcc CFS/DDT (outorder)
256_5
Our CFS/DDT implementation in sim-outorder performed worse
than the sim-bpred implementation in every simulation. Accuracy
differences ranged from 13.98% to 8.94% with an average of
10.7%.
0.1200
gcc CFS/DDT (bpred)
256_3
Figure 4
0.1400
0.0800
256_1
Tree Configuration (#Trees_Depth)
0.1400
0.1000
512_5
0.1200
0.1600
0.1200
256_5
0.1400
256_0
Our next step was to investigate if our branch predictor could
achieve accuracy comparable to or better than a tournament
predictor of the same size, for a processor that uses out-of-order
execution. Sim-outorder, another part of the SimpleScalar suite,
simulates an out-of-order processor, and met our testing needs.
Since we previously already verified that register values do in fact
correlate to branch outcomes, we needed to port our CFS/DDT
branch predictor over to sim-outorder to provide realistic
simulations involving CPU timing.
256_3
Tree Configuration (#Trees_Depth)
Misprediction Rate
average by 4.72% (over a feature set of only history bits). While
adding 32 bits of register values increases prediction accuracy by
more than adding lower 8 bits of register values, we must also
consider the increase in storage size resulting from these
additions. Adding the lower 8 bits of the register values increases
storage size requirements by 256 bytes (one 8 bit counter per
feature, 256 additional features) per dynamic decision tree node,
while adding 32 bits of register values increases storage size
requirements by 1024 bytes per dynamic decision tree node.
Thus, we feel that the ~1% increase in accuracy of the CFS/DDT
with 32 bits of register values over the CFS/DDT with 8 bits of
register values, is outweighed by the four times greater increase in
storage size required by the 32 bits CFS/DDT. It would be worth
examining in a future study how an increase in the number of
register bits used might decrease the number of trees or maximum
tree depth needed to achieve a target prediction accuracy.
However, time constraints prevented us from examining that in
this study. For our remaining analysis we will consider CFS/DDT
predictors that use 64 history bits and the lower 8 bits of each of
the 32 integer register values.
0.1000
gcc CFS/DDT (reg8)
0.0800
gcc TOURN
0.0600
0.0400
0.0600
0.0200
0.0400
0.0000
0.0200
256_0
0.0000
256_0
256_1
256_3
256_5
Tree Configuration (#Trees_Depth)
512_5
256_1
256_3
256_5
512_5
Equivalent Tree Configuration for
Predictor Size (#Trees_Depth)
0.1800
0.1600
Mispredict Rate
0.1400
0.1200
0.1000
tw olf CFS/DDT (reg8)
0.0800
tw olf TOURN
0.0600
overlapping execution of instructions and out of order processing.
Essentially the state of the registers could change from the time a
branch is predicted to the time it is resolved. To compensate for
this problem, we modified our implementation so that in the
predict mode we save the current state of all the register feature
bits. In the update stage, this saved register state for that
prediction is used for node updating, rather than the current
register state at the time of update. Simulations were run to see
how using saved register state in the update phase would affect
accuracy.
0.0400
0.0200
0.1600
0.0000
0.1400
256_0
256_1
256_3
256_5
512_5
0.1200
Mispredict Rate
Equivalent Tree Configuration for
Predictor Size (#Trees_Depth)
0.1400
0.1000
gcc CFS/DDT (reg8)
0.0800
gcc TOURN
gcc CFS/DDT (saveregs)
0.0600
0.0400
0.1200
0.0200
Mispredict Rate
0.1000
0.0000
0.0800
256_0
parser CFS/DDT (reg8)
parser TOURN
0.0600
256_1
256_3
256_5
512_5
Equivalent Tree Configuration for
Predictor Size (#Trees_Depth)
0.0400
0.1800
0.0200
0.1600
0.0000
256_1
256_3
256_5
0.1400
512_5
Equivalent Tree Configuration for
Predictor Size (#Trees_Depth)
Mispredict Rate
256_0
Figure 5
We believe that the CFS/DDT is so sensitive to out-of-order
execution because it correlates on and relies heavily on register
values. This reliance is evidenced by the significant increase in
prediction accuracy from correlating solely on history bits to
correlating on register bits as well in Section 4.4. These register
values may have different values in trace-driven simulation than
in out-of-order simulation.
4.7 Feature Set Differences in Update and
Lookup Mode
We predicted that part of the large increase in misprediction rate
was due to the fact that the register values changed in between the
predict and update phase of branch prediction due to the
tw olf CFS/DDT (reg8)
0.1000
tw olf TOURN
0.0800
tw olf CFS/DDT (saveregs)
0.0600
0.0400
0.0200
0.0000
256_0
256_1
256_3
256_5
512_5
Equivalent Tree Configuration for
Predictor Size (#Trees_Depth)
0.1400
0.1200
0.1000
Mispredict Rate
Figure 5 shows our simulation results after porting our branch
predictor over to sim-outorder. Our CFS/DDT consistently
performs worse than the tournament predictor in sim-outorder.
The accuracy rate difference of the tournament predictor over the
CFS/DDT ranges from 7.69% to 3.29% with an average
difference of 5.42%. Our CFS/DDT performed comparably with
the tournament predictor in sim-bpred, yet performed quite worse
than the tournament predictor in sim-outorder. Thus, we reasoned
that the CFS/DDT is more sensitive to out-of-order execution than
the tournament predictor.
0.1200
parser CFS/DDT (reg8)
0.0800
parser TOURN
0.0600
parser CFS/DDT (saveregs)
0.0400
0.0200
0.0000
256_0
256_1
256_3
256_5
512_5
Equivalent Tree Configuration for Predictor
Size (#Trees_Depth)
We see that saving register state before updating yielded a
Figure 6
performance improvement over the standard CFS/DDT
implementation with history bits and the lower 8 bits of each
register. Improvement in mispredict ranged from 2.43% to
1.32%, with an average improvement of 1.94%. However, the
tournament predictor still beats the modified CFS/DDT
implementation. In the next section we discuss some possible
reasons for why we were unable to match the performance of the
tournament predictor and consider possible ways of closing the
performance gap.
4.8 Analysis of Out of Order Execution
Results
Clearly there exists a significant performance gap between the
tournament predictor and variations of the CFS/DDT predictor
when both are modeled in an out of order execution environment.
Since the predictors were more evenly matched when executed in
sim-bpred, with the CFS/DDT predictor besting the tournament
predictor in certain configurations, we must consider what it is
about simulating in sim-outorder that would result in CFS/DDT
taking such a performance hit.
At this point we examined simulation traces to see if the large
difference in accuracy might have been caused by some error in
recording branch prediction statistics or if the porting of our code
from the sim-bpred to the sim-outorder model had otherwise
failed. In sim-outorder branch statistics are recorded during calls
to the branch update function. After careful analysis we
determined that the update function was only being called on
correct-path executions. Our worry that wrong-path executions
were making the statistics appear worse was unfounded. To be
sure we checked the addresses of branch instructions for which
the update function was called and confirmed it was the same
sequence of addresses generated by sim-bpred. Next we printed
the state of register values at the time of calls to the branch update
functions. We confirmed that in some cases the values of
registers during a call to predict in sim-outorder would differ from
the values of registers during the call to predict for the same
branch in sim-bpred. This difference in register values then
caused different splitting variables to be selected in some cases,
and thus we saw a difference in accuracy. We believe this shows
the drop in accuracy is an artifact of the difference in the register
file as a result of the overlapped and out of order execution of
instructions in sim-outorder. We then attempted to discern how
differences in the register file might cause a loss in accuracy.
The tournament predictor bases its prediction only on branch
history, while the CFS/DDT gets much of its prediction accuracy
from correlating on register values that are available at the time of
prediction. We expect then that the increased performance gap
will have to do with the register values. There are two scenarios
that might result in CFS/DDT making a prediction based off of
data different from what it saw in sim-bpred. Because of
CFS/DDT’s reliance on register values, it takes a significant
performance hit.
The first scenario is when a branch outcome depends on an
instruction that has been executed but not yet committed. In such
a case the needed register value is sitting inside the physical
register file but is not yet mapped to the architectural register the
branch will be looking at. As a result, performance degrades.
This case can be taken care of if CFS/DDT is expanded to
correlate on the entire physical register file and knows which
physical register the architectural register identified in the
instruction will eventually point to. We were unable to implement
this feature, but certainly further investigation warrants seeing
what performance can be reclaimed in this case.
The second scenario does not have as straightforward a solution.
In an out of order core, we may expect there are times when a
branch instruction is fetched while a previous instruction the
branch outcome depends on is still waiting to be issued and
executed. As a result, the data value that the branch will depend
on has not even be computed yet, let along committed. Although
the branch itself will also wait to be issued due to the true
dependency, the branch prediction must still occur immediately in
order to fetch new instructions the next cycle. Thus, branch
prediction may occur using a register file with stale data values.
We know of no good ways to predict accurately based off of data
values that do not yet exist.
5. Conclusion
In this paper we have examined a new approach to dynamic
branch prediction, the Correlating Feature Selector/Dynamic
Decision Tree predictor. By using techniques from machine
learning to dynamically select which features each branch should
base a prediction on, CFS/DDTs scale linearly with added
features, not exponentially. As a result we have the ability to
explore the use of additional features without the exponential
increase in storage size.
We have shown that a tournament predictor modeled off of the
EV6 branch predictor outperforms a CFS/DDT predictor using
only global and local history bits. However, by adding the lowest
8 bits of all integer registers to the feature set, we have shown that
the new CFS/DDT predictor gains more accuracy as more storage
is devoted to the branch predictor (used up by additional trees or
deeper trees) than the tournament predictor, so that at moderate
storage sizes the expanded CFS/DDT predictor outperforms the
tournament predictor.
We next evaluated the CFS/DDT predictor in sim-outorder to
measure the predictor's sensitivity to register values and the
effects of out of order execution. We found a significant loss in
the predictor's accuracy compared to the tournament predictor,
and suggested two situations that might cause such a performance
loss. The first occurs when the instructions writing to the
registers on which a branch's outcome depends have executed but
not committed, so that the register values are sitting in physical
but not architectural registers. We have suggested a workaround
for this scenario, but have not yet explored what sort of gains it
will yield. The second situation occurs when the instructions
writing to the registers on which a branch's outcome depends are
waiting in the issue queue, whether it is due to some dependency,
structural hazard, or something else. In this case although the
branch instruction will also wait in the issue queue, a prediction is
still necessary right away in order to fetch instructions for the next
cycle. When this occurs prediction is based off of a stale register
file, and accuracy is reduced. Due to time constraints, we leave
this at future work to determine and examine workarounds for this
situation.
It has been shown that the CFS/DDT predictor has an enormous
amount of potential as a branch prediction scheme. This is
especially true in future designs where more transistors may be
dedicated to branch prediction storage, permitting a greater
number of trees and greater maximum depth to each tree.
However, simulations in an out-of-order processor model show
that techniques must first be developed to account for register
values not updated in time for a branch prediction before
CFS/DDT will be feasible in a modern out-of-order processor.
6. Acknowledgements
The authors wish to acknowledge with gratitude the instructor,
TAs, and fellow students of 18-741 for providing immeasurable
insight. The authors would also like to thank the not so
anonymous referees (course instructor and TAs) for their
guidance.
7. References
[1] Tse-Yu Yeh and Yale N. Patt, “Two-Level Adaptive
Training Branch Prediction”.
[2] Timothy H. Heil, Zak Smith, and J.E. Smith, “Improving
Branch Predictors by Correlating on Data Values”.
[3] Daniel A. Jimenez and Calvin Lin, “Dynamic Branch
Prediction with Perceptrons”.
[4] Gabriel H. Loh and Dana S. Henry, “Applying Machine
Learning for Ensemble Branch Predictors”.
[5] Alan Fern, Robert Givan, Babak Falsafi, and T.N.
Vijaykumar, “Dynamic Feature Selection for Hardware
Prediction”.
[6] R.E. Kessler, E.J. McLellan, and D.A. Webb, “The Alpha
21264 Microprocessor Architecture”.