DETECTION OF BOTTLENECKS FOR MULTIPLE PRODUCTS AND MITIGATION
USING ALTERNATIVE PROCESS PLANS
A Thesis by
Arul Pragash Karthikeyan
Bachelor of Engineering, Anna University, India, 2007
Submitted to the Department of Industrial and Manufacturing Engineering
and the faculty of the Graduate School of
Wichita State University
in partial fulfillment of
the requirements for the degree of
Master of Science
December, 2010
© Copyright 2010 by Arul Pragash Karthikeyan
All Rights Reserved
DETECTION OF BOTTLENECKS FOR MULTIPLE PRODUCTS AND MITIGATION
USING ALTERNATIVE PROCESS PLANS
The following faculty members have examined the final copy of this thesis for form and
content, and recommend that it be accepted in partial fulfillment of the requirement for
the degree of Master of Science with a major in Industrial Engineering.
__________________________________
Krishna K. Krishnan, Committee Chair
__________________________________
Bayram Yildrim, Committee Member
__________________________________
Ramazan Asmatulu, Committee Member
iii
DEDICATION
Dedicated to my family and my loved ones
iv
ACKNOWLEDGEMENTS
I would like to thank all the people who have helped and supported me in completing this
thesis. First of all, I am greatly thankful to my advisor, Dr. Krishna K. Krishnan for his patience,
tutelage and encouragement throughout my research work and academics. He has been a great
mentor and given a lot of time and effort into assisting me with my research. I also would like to
thank Dr. Bayram Yildirim and Dr. Ramazan Asmatulu for allotting their valuable time to review
this thesis and be a part of my thesis committee.
Most importantly, I thank my parents Mr. Karthikeyan & Mrs. Thilagavathi and my
brother, Devasenapathy for their love, prayers and constant moral support throughout my life.
My special thanks to my friends Prasanna, Kaushik, Pradeesh and Prakhash for their good
suggestions and support during this thesis.
Finally, I would like to give special appreciation to my cousin, Mrs. Devasena, my
brother-in-law, Mr. Ravichandran and colleague, Mr. Senthil Subramaniam for their interest and
motivation on my research work.
v
ABSTRACT
In a manufacturing environment, productivity and quality of the system can be improved
by focusing on production constraints (bottlenecks). As a result, the bottleneck detection
methods have gained more importance in enhancing the performance of the system. There are
several short-term and long-term bottleneck detection methods. This research focuses on inactive
state duration bottleneck detection for multiple product flow as high complexity arises in
material flow due to several products and different processing sequences. The efficiency of the
proposed methodology is validated by case studies using discrete event simulation models. The
integration of simulation tool to detect bottlenecks in the manufacturing system has been useful
in real-time case studies. An automatic bottleneck detection method was proposed to identify the
bottleneck time and bottleneck machines in an easier manner.
Previous research focuses on additional capacity and buffers to machines to mitigate the
bottleneck. This approach spotlights the selection of alternative process plan in the presence of
bottlenecks with a objective of minimized bottleneck time and minimized machining cost of the
products in the given process plan. A mathematical model was presented with these objectives.
Case studies were conducted for initially selected process plan and alternative process plan to
show the improvements in system performance.
vi
TABLE OF CONTENTS
Chapter
Page
1. INTRODUCTION……………………………………………………………………………..1
1.1
1.2
1.3
1.4
1.5
1.6
1.7
Problem Background………………………………………………………………….1
Bottlenecks in Manufacturing System ......................................................................... 1
Bottleneck Detection Methods ..................................................................................... 3
Selection of Alternative Process Plan .......................................................................... 5
Simulation-Based Procedure for Real-Time Control ................................................... 6
Research Objective ....................................................................................................... 7
Chapter Outline ............................................................................................................. 7
2. LITERATURE REVIEW ........................................................................................................... 8
2.1
2.2
2.3
2.4
2.5
2.6
Introduction .................................................................................................................. 8
Types of Bottleneck ..................................................................................................... 8
Bottleneck detection methods ....................................................................................... 9
Simulation study in real-time scenario ...................................................................... 15
Selection of alternative process plan…………………………………………………17
Research motivation.................................................................................................... 19
3. METHODOLOGY ................................................................................................................... 20
3.1
3.2
Introduction…………………………………………………………………………..20
Bottleneck Detection Methods……………………………………………………….22
3.2.1 Active Duration Method…………………………………………………………23
3.2.2 Inactive Duration Method for Single Product Flow……………………………..24
3.3
Inactive Duration Method for Multiple Product Flow ................................................ 25
3.3.1 Input Data ............................................................................................................. 27
3.3.2 Simulation Model.................................................................................................. 28
3.3.3 Bottleneck Detection for Multiple Product Flow.................................................. 28
3.4
Automatic Bottleneck Detection Method .................................................................. 31
3.5
Performance Measures ................................................................................................ 33
3.5.1 Contribution Factor (CF)………………………………………………………...34
3.5.2 Value Added Ratio (VAR).................................................................................... 35
3.6
Selection of Alternative Process Plan in Real Time Production Scenario .................. 36
3.6.1 Initial Process Plan Selection ............................................................................... 38
3.6.1.1 Bottleneck Detection using Inactive State Method1………………………41
3.6.1.2 Performance Measures…………………………………………………….45
3.6.2 Selection of Alternative Process Plan……………………………………………47
3.6.2.1 Bottleneck Detection using Inactive State Method……………………….48
3.6.2.2 Performance Measures ................................................................................ 52
3.7
Conclusion ................................................................................................................. 53
vii
TABLE OF CONTENTS (Contd)
Chapter
Page
4. CASE STUDIES ....................................................................................................................... 54
Case Study - I (3 Products x 6 M/c‟s)………………………………………………..54
4.1.1 Bottleneck time charts........................................................................................... 54
4.1.2 Comparison of bottleneck characteristics ............................................................. 55
4.2
Case Study - II (3 Products x 4 M/c‟s) ...................................................................... 56
4.2.1 Bottleneck Characteristics .................................................................................... 56
4.3
Case Study - III (5 Products x 10 M/c‟s)…………………………………………….57
4.3.1 Input Data………………………………………………………………………..57
4.3.2 Performance Measures…………………………………………………………...64
4.4
Conclusion…………………………………………………………………………...66
4.1
5. CONCLUSIONS AND FUTURE RESEARCH……………………………………………..67
5.1
5.2
Conclusion…………………………………………………………………………...67
Future Research……………………………………………………………………...68
REFERENCES ............................................................................................................................. 69
viii
LIST OF TABLES
Table
Page
1.1
Bottleneck Detection Methods……………………………………………………………3
1.2
Manufacturing decisions based on planning horizons ........................................................ 5
2.1
Active-Inactive states for different machines……………………………………………13
3.1
Processing time of products for 3 Products x 4 M/c‟s ...................................................... 27
3.2
Product sequence data for 3 Products x 4 M/c‟s ............................................................... 27
3.3
Arrival rate of products in the system .............................................................................. 27
3.4
Bottleneck time of machines for 3 Products x 4 M/c‟s .................................................... 31
3.5
Bottleneck time of products for 3 Products x 4 M/c‟s…………………………………...34
3.6
Machining cost/min of products for 3 Products x 6 M/c‟s………………………………39
3.7
Total cost of products in their different sequences for 3 Products x 6 M/c‟s ................... 40
3.8
Initial product sequence data for 3 Products x 6 M/c‟s .................................................... 41
3.9
Procesing time of products for 3 Products x 6 M/c‟s ....................................................... 41
3.10
Arrival rate of products for 3 Products x 6 M/c‟s ............................................................. 42
3.11
Bottleneck time of machines for 3 Products x 6 M/c‟s .................................................... 45
3.12
Bottleneck time of products for 3 Products x 6 M/c‟s ...................................................... 46
3.13
Alternative product sequence data for 3 Products x 6 M/c‟s…………………………….47
3.14
Processing time of products for 3 Products x 6 M/c‟s ...................................................... 48
3.15
Bottleneck time of machines for 3 Products x 6 M/c‟s .................................................... 51
3.16
Bottleneck time of products for 3 Products x 6 M/c‟s ...................................................... 52
4.1
Bottleneck Characteristics for 3 Products x 6 M/c‟s ....................................................... 56
ix
LIST OF TABLES (Contd)
Table
Page
4.2
Bottleneck Characteristics for 3 Products x 4 M/c‟s…………………………………….56
4.3
Processing time of products for 5 Products x 10 M/c‟s………………………………….57
4.4
Product sequence data for 5 Products x 10 M/c‟s ............................................................ 58
4.5
Arrival rate of products in the system .............................................................................. 58
4.6
Bottleneck time of machines for 5 Products x 10 M/c‟s .................................................. 63
4.7
Bottleneck time of products for 5 Products x 10 M/c‟s ................................................... 64
4.8
Bottleneck characteristics for 5 Products x 10 M/c‟s ....................................................... 66
x
LIST OF FIGURES
Figure
Page
1.1
Simulation Project Methodology ........................................................................................ 6
2.1
Flowchart for proposed procedure ................................................................................... 11
2.2
SFSI structure and functional logic................................................................................... 15
2.3
Example for process plan selection .................................................................................. 18
3.1
Average active duration bottleneck time chart ................................................................. 23
3.2
Processing time chart for 3 Products x 4 M/c‟s by inactive duration method .................. 29
3.3
Bottleneck time chart for 3 Products x 4 M/c‟s by inactive duration method .................. 29
3.4
Flowchart for selecting alternative process plan…………………………………………38
3.5
Processing time chart for 3 Products x 6 M/c‟s for intial process plan………………… 43
3.6
Processing time chart for 3 Products x 6 M/c‟s for alternative process plan ................... 49
4.1
Bottleneck time chart of 3 Products x 6 M/c‟s for intial process plan ............................. 54
4.2
Bottleneck time chart of 3 Products x 6 M/c‟s for alternative process plan .................... 55
4.3
Processing time chart for 5 Products x 10 M/c‟s by inactive duration method ................ 59
4.4
Bottleneck time chart of 5 Products x 10 M/c‟s by inactive duration method ................ 60
xi
CHAPTER 1
INTRODUCTION
1.1
Problem Background
In a manufacturing system, assembly line is the group of workstations which performs
the predefined assembly processes in a sequential manner (Vilarinho, & Simaria, 2002). The
production rate of the entire system in the assembly line is determined by the cycle time. Cycle
time is the total time taken by the process from the start to finish of the system. When the cycle
time exceeds the target time, the performance of the system is reduced. The major constraints for
the system performance are bottleneck machines and improper selection of process plan. The
performance enhancement on bottleneck machines yields drastically higher overall system
throughput as compared to non-bottleneck machines (Li, Chang, & Ni, 2008). Detection of
bottlenecks and the ways to improve it, ensures good product quality and on-time delivery. As a
result, there is a high upsurge of research in bottleneck analysis in the manufacturing system.
Also the constraints in the optimization of production schedules are relaxed by the alternative
process plans, which in turn results in better delivery schedules (Sormaz, & Khoshnevis, 2003).
Hence, the critical problem is to identify and select the alternative process plan in the presence of
bottleneck to attain the actual cycle time with cost effective measures.
1.2
Bottlenecks in Manufacturing System
According to Goldratt (1992), the flow of goods of an entire system is limited by the
capacity of different machines; some machines affect the overall system performance more than
others. These machines are called bottlenecks.”An hour lost at the bottleneck is an hour lost for
the entire system. An hour saved at a bottleneck is a mirage”. The concept of Theory of
Constraints (TOC) is “The system output rate is limited by the machine with the slowest rate”.
1
This machine is called the bottleneck and TOC mainly focuses on managing the bottleneck
resource to drive more income for the company (Goldratt, & Cox, 1986).
The diversity of the bottlenecks can be seen from various definitions summarized by
(Lawrence, & Buss, 1995):
When the capacity of the resource does not meet the demand placed upon it.
When the output is limited by any operation.
Temporary blockades decrease the output.
Congestion points occur in product flowing.
A machine that impedes production system throughput.
Kuo, Lim, and Meerkov, (1996) proposed a definition for bottleneck based on the
sensitivity to the rate of production. A machine is said to be bottleneck, when the sensitivity
performance index to its production rate in isolation is larger than all other machines. Knessl,
and Tier (1998) defined bottleneck as the machine with the largest idle/busy ratio with average
utilization measuring method. While this method may be easy to automate, it results in multiple
bottlenecks. If there is a buffer with largest work-in-process inventory and the machine
immediately downstream of this buffer is said to be the bottleneck (Kuo, Lim, & Meerkov,
1996). The machine with the longest average active period or state is said to be the bottleneck
(Roser, Nakano, & Tanaka, 2001). The overall system throughput is based on this machine
because it is least likely interrupted by other machines.
Based on the measurement of average waiting time, the bottleneck is the machine which
has the longest average waiting time (Pollett, 2003). But this method is suitable only for systems
containing buffers and not for systems without buffers. Li, Chang, and Ni, (2008) defined
bottleneck as the lowest starvation and blockage time of all the machines in a system.
2
The three types of main bottlenecks in dynamic bottleneck studies are as follows:
Simple Bottleneck (Grosfeld-Nir, 1995)
Multiple Bottleneck (Aneja, & Punnen, 1999)
Shifting Bottleneck (Roser, Nakano, & Tanaka, 2001)
In a simple bottleneck situation, there is only one bottleneck machine for the entire
period. In multiple bottleneck situations, there is more than one bottleneck exists at a given
instant of time. In shifting bottleneck detection case, instantaneous shifting of bottleneck occurs
from one workstation to another and it does not have a single bottleneck for the entire period.
1.3
Bottleneck Detection Methods
Some of the bottleneck detection methods with their characteristics and measurements
are shown in Table 1.1.
TABLE 1.1 Bottleneck Detection Methods (Roser, Nakano, & Tanaka, 2003)
METHOD
CHARACTERISTIC
1. Queue Size before
The bottleneck is the machine which has the
the machine
MEASUREMENT
Quantity of products
longest queue before the machine, waiting to
be processed.
2. Utilization Factor
The percentage of time that the machine is
Percentage
working with regards to the system‟s overall
time is measured. The machine with highest
utilization is the bottleneck.
3. Waiting Time before
the machine
It is measured on how long a product will
wait in queue to be processed.
3
Time
4. Active State Method
Sum of the overall duration that a machine is
Percentage of time or
in active state (working state). The machine
Time unit
with the highest continuous active period is
the bottleneck. This method is applied for
dynamic bottleneck detection methods.
5. Shifting Bottleneck
Method
Sum of duration of the active state without
Percentage of time or
interruption in a period of time for a
Time unit
production station. Even though instantly
some machines can be the bottleneck, the one
with the highest value is the bottleneck.
Table 1.1 (Contd)
For computer networks, an automatic bottleneck detection method based on the
measurement of work-load with decision theory was given by Berger, Bregman, and Kogan
(1999). Kasemset, and Kachitvichyanukul (2007) identified bottleneck machines based on three
factors, utilization, throughput rate and utilization factor. The machines with high utilization, low
output rate, and high utilization factor, ρ (ρ = λ/µ, λ – arrival rate of each process and µ departure rate of each process) are considered to be bottleneck. Sengupta, Das, and VanTil
(2008) proposed a new method for bottleneck detection, which analyzes failure cycle data and
inter-departure time to find and rank bottleneck machines in a production system. This method is
applicable only to cases with deterministic cycle time. The methodology can be used to analyze
for both steady state and non-steady state data in a job shop.
Tamilselvan, Krishnan, and Cheraghi, (2010) proposed a method for detecting
bottlenecks based on the inactive state of each machine for the single product flow. The inactive
state includes the idle time, blocked time, and failure time of the machine. This work is the
extension of the inactive state method to multiple product flow and also automates the bottleneck
detection method with java programming. It also focuses on selection of alternative process plan
4
in the presence of bottleneck machines to improve the productivity and reduce the cycle time of
the entire system.
1.4
Selection of Alternative Process Plan
Process plan involves the operation sequences of a product and also the parts required to
produce the product. Process plans are created in such a way that the demand is met at the right
time. According to Lee and Kim (2001) various process plans are developed due to the existence
of alternative machines and processes to manufacture the similar part type. The three planning
horizons used for decision making in process planning are shown in Table 1.2
TABLE 1.2 Manufacturing decisions based on planning horizons (Hopp, & Spearman, 2000)
PLANNING
HORIZON
MANUFACTURING
DECISIONS
Short Term
Material flow
Assignment of workers
Decisions on machine setup
Intermediate Term
Work Scheduling
Decisions on purchasing
Long Term
Capacity Decisions
Design of products
Financial Decisions
Most process plans are based on the objective of minimization of cost and time and not
on the presence of bottleneck in the production of the product. However, based on precedence
constraints several alternate process plans can be used to manufacture the same product.
This
work focuses on selection of alternative process plans to mitigate bottlenecks to attain target
cycle time. Improved results for various conditions and different performance parameters can be
obtained by giving different sequencing rules (Gupta, Sivakumar, & Sarawgi, 2002).
5
1.5
Simulation-Based Procedure for Real-Time Control
Simulation based approach is widely used for system throughput analysis and detecting
bottlenecks in aircraft assembly systems and automotive assembly lines (Roser, Nakano, &
Tanaka, 2003). Design and management of production line can be significantly improved by
accurate discrete event simulation models. The main benefit of simulation based method is that it
can even identify bottlenecks in complex production systems. The framework of the simulation
project methodology is shown in Figure 1.1.
System Definition
Validation
Conceptual Model
Verification
Simulation Model
Application
FIGURE 1.1 Simulation Project Methodology (Law, & Kelton, 2000)
Shop-floor control is mainly focused on real-time simulation. According to Gupta,
Sivakumar, and Sarawgi (2002), simulation based proactive decision support increases proper
utilization of resources, higher flexibility and faster response on customer demands. On-line
simulation system has the capability to predict the future condition of the shop floor based on its
current status. The real time system uses simulation model because it automatically updates the
necessary conditions and presents the results with warning if the current plans cannot be
achieved (Gaafar, & Shaik, 1993). Feedback of the simulation output will help in improving the
system performance.
6
In this thesis, a simulation model was developed using Quest software. It is a flexible tool
to modify the changes occurring in the process plans of the manufacturing systems. The
simulation output is integrated with working tools like MS Excel for developing bottleneck
detection charts. The real time job shop scenario is run by the quest and it gives results for
analyzing the system performance.
1.6
Research Objective
The objectives of the thesis are:
Bottleneck detection in live simulation concept using inactive state approach for multiple
product flow.
Automated bottleneck detection using java programming in the simulation study.
Measures that describes the characteristics of the bottlenecks.
Selection of alternative process plan in the presence of bottleneck to attain the cycle time
with cost effective measures.
1.7
Chapter Outline
This thesis is structured into four chapters. Chapter 2 presents the literature review of all
previous researches carried out on the different bottleneck detection methods, simulation
modeling for the bottleneck analysis and alternative process plans in the manufacturing system to
improve the on-time job delivery. In Chapter 3, the methodology to detect the bottleneck for
multiple product flow is addressed with case studies. Also, the identification and selection of
alternative process plan in the presence of bottleneck is explained. Chapter 4 presents case
studies based on bottleneck detection methodology using inactive state duration method for
multiple product flow. In Chapter 5, conclusion for the modified bottleneck detection method
and future research work are discussed.
7
CHAPTER 2
LITERATURE REVIEW
2.1
Introduction
This chapter explains the previous research works on bottleneck detection methods and
selection of alternative process plan in the manufacturing system. Section 2.2 discusses about the
different types of bottlenecks present in the manufacturing system. Section 2.3 reviews the
various bottleneck detection methods used for identifying the bottlenecks in a production line.
Section 2.4 illustrates the simulation study on real-time scenario analysis in a manufacturing
environment. Section 2.5 discusses about the various methodology for selecting alternative
process plan in attaining the target cycle time. Section 2.6 explains about the research motivation
and summarizes the literature review of the research works.
2.2
Types of Bottleneck
Based on the duration of the bottleneck machines, bottlenecks are classified into two
types:
Short term bottlenecks
Long term bottlenecks
The machines which slowdowns the performance of the system for a short period of time
is said to be the short term bottleneck machines. On the other hand, the machines which
slowdowns the system performance for a long period of time is called as long term bottleneck
machines. Large term bottleneck machines have the high bottleneck time as compared to other
machines in the production system and also have a high impact on reduction in system
performance.
8
The bottlenecks can be further classified into three types:
Simple bottleneck
Multiple bottleneck
Shifting bottleneck
In an entire period of time, there will be only one bottleneck machine in the system and it
is referred as simple bottleneck (Grosfeld-Nir, 1995). When some bottlenecks are fixed for the
entire period of the system, they are called as multiple bottlenecks (Aneja, & Punnen, 1999).
According to Roser, Nakano, and Tanaka (2002), shifting bottlenecks are the one in which there
will be an instantaneous shifting of bottlenecks from one station to another without any single
bottleneck domination for an entire period.
2.3
Bottleneck detection methods
Lawrence and Buss (1994) proposed a queue length analysis method for detecting
bottlenecks. The machine which of has the longest queue length is said to be the bottleneck. The
measurement is based on the quantity of products. This method is suitable only for detecting
momentary bottlenecks.
Wang, Zhao, and Zheng (2005) summarized bottleneck detection into the following
categories:
PIP (Performance In Processing) bottleneck detection
Measuring the average waiting time (Law, & Kelton, 1991)
Measuring the average workload (Law, & Kelton, 1991)
Measuring the average active duration (Roser, Nakano, & Tanaka, 2001)
Shift bottleneck detection (Roser, Nakano, & Tanaka, 2002)
Sensitivity based detection (Chiang, Kuo, & Meerkov, 1998)
9
Chiang, Kuo, and Meerkov (2001) proposed an indirect method for bottleneck
identification with the on-line system data. The processing of two adjacent machines is compared
to identify the bottleneck machines. This method is also called as arrow-based method because
the direction of the bottleneck machines are described using the arrows between the adjacent
machines. According to this method, the bottleneck is found to be at downstream if the blockage
time value of upstream machine is more than the downstream machine‟s starvation time value. In
the opposite case, the bottleneck will be located at the upstream of the system. The case study
with two machines and a buffer in a serial line was presented for the analytical verification of the
method with Bernoulli model. But method does not give more accurate results using the on-line
data.
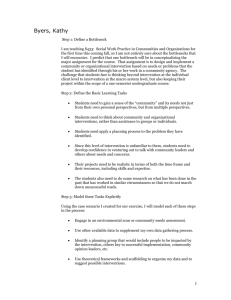
Kasemset and Kachitvichyanukul (2007) developed a bottleneck identification procedure
with simulation as a support tool. Theory of Constraints (TOC) policy is related with the new
procedure. This methodology is applied only for single bottleneck cases. The machine with
highest utilization and utilization factor and low throughput rate is said to be the bottleneck
machine. The effectiveness of the resulting system is verified using simulation. The bottleneck‟s
capacity is increased to evaluate the system improvement. If the throughput increases, then the
machine is said to the bottleneck. If there is no improvement in throughput, the procedure is
applied again for another bottleneck machine. The proposed procedure is shown in the Figure
2.1.
10
Start
Develop simulation
model
Manufacturing
existing data
Simulation runs for
collecting data
Bottleneck rate
calculation
Time between
arrival and
departure from
each process
Utilization of
each process
Utilization factor
calculation
Bottleneck candidate
selection
Real bottleneck
selection
Evaluate solution by
applying simulation
Adding capacity of
previous bottelneck
NO
Improve in
throughput?
YES
Make conclusion
Stop
Figure 2.1 Flowchart for proposed procedure (Kasemset, & Kachitvichyanukul, 2007)
Li, Chang, and Ni (2008) proposed a data driven bottleneck detection for both short term
and long term in the manufacturing systems without developing a simulation or analytical model.
In this method, the production constraints are identified based on starvation and blockage
probabilities of the production line and also on buffer content records. It is a throughput
bottleneck detection method. A case study was conducted in an industry to validate the
efficiency of the new data driven bottleneck detection method and found to be useful in
11
increasing the throughput of the system by enhancing the operation management in the shop
floor. This method can be used for real time scenarios to track the system performance. It can
also be verified by simulation and analytical method.
A simulation based procedure to identify multiple bottlenecks with the Theory of
Constraints (TOC) policy was proposed by Kasemset and Kachitvichyanukul (2008). The
bottlenecks are identified based on the DBR (Drum-Buffer-Rope) method in the simulation study
and then the performance of the system is assessed. The effectiveness of the DBR system is
verified during the performance evaluation of the system. Multiple bottleneck cases are more
complicated than the single bottleneck cases. The bottleneck machines are identified by using the
three factors: utilization, utilization factor and throughput rate (Kasemset, & Kachitvichyanukul,
2007). Buffers are used in this methodology. DBR system is developed in which Drum refers to
the bottleneck location, buffers are located before the bottleneck machines and Rope is used to
manage the physical flow movement by modifying the control information. FIFO sequencing
rule is applied for this simulation study.
Sengupta, Das, and Vantil (2008) presented a new method of bottleneck detection for
identifying and ranking the bottlenecks by analyzing the inter-departure time from each machine.
The data are related to performance and can be captured easily with low computational troubles.
The data integrity can be improved with a new set of rules proposed by Sengupta, Das, and
Vantil (2008). This method can be used in both steady state and non-steady state condition. The
steps that explain the methodology of this proposed method are as follows.
Step 1: Data collection of inter-departure time from different machines
Step 2: Failure cycles are identified for each machine
Step 3: The collected data is filtered by removing the failure cycles
12
Step 4: The combined time of blocked-down and blocked-up states of different machines
are estimated.
In this method, deterministic cycle time is used to find the average as well as momentary
bottlenecks.
Roser, Nakano, and Tanaka (2001) developed an active state duration method for
identifying the bottlenecks. The machine with the highest active state duration is said to be the
bottleneck machine. This method is applicable for the shifting bottleneck detection. The machine
which has the highest active state should be without any inactive state interruption. In a
production system scenario, there is possible of only two states- active state and inactive state.
Table2.1 shows the various active and inactive states for different machines.
Table 2.1 Active-Inactive states for different machines (Roser, Nakano, & Tanaka, 2001)
Machine
Active
Processing machine Working, serviced, in repair, changing
tools
AGV
Human worker
Supply
Computer
Output
Phone operator
Inactive
Waiting for service,
blocked, waiting for part
Moving to a drop-of location, moving
to a pickup location, recharging, being
re-paired
Waiting, moving to a
waiting area
Working, recovering
Waiting
Obtaining new part
Blocked
Calculating
Idle
Removing a part from the system
Waiting
Servicing customer
Waiting
When the simulation data is obtained, the active state duration is found for all machines
in the system. Then the average duration for each machine is calculated. The machine which is
least interrupted by the other machines in the system and has the highest average active duration
13
is said to be the bottleneck machine. This bottleneck machine has the most impact on the
throughput of the overall system. The accuracy of the detecting bottlenecks can be measured
easily as the average active periods are independent of each other. The active state duration
method for shifting bottleneck detection was applied to find the throughput sensitivity analysis of
the production system using a single simulation. This method was also used in detecting
bottlenecks in a system with material handling devices like AGV. In this case, even AGV can act
as a bottleneck to the manufacturing system and affect the system performance.
The machine which makes other machines in the system to starve or block is said to be
the bottleneck machine (Tamilselvan, Krishnan, & Cheraghi, 2010). This method focused on
shifting bottlenecks detection. Bottlenecks are identified based on the inactive state duration
method. Inactive state duration includes the idle time, blocked time and failure time of the
machines. When the simulation is completed, a processing time chart is developed with working
state and inactive state of each machine. Bottlenecks are identified by tracking the chart in both
upstream and downstream of the system. But tracking is done manually and it is a time
consuming activity.
Tamilselvan, Krishnan, and Cheraghi, (2010) proposed four new measures such as a)
Bottleneck time ratio (α), b) Bottleneck ratio (γ), c) Bottleneck shifting frequency (φ) and d)
Bottleneck Severity ratio (χ) for capturing the bottleneck characteristics. The analysis was
carried out on shifting bottleneck detection with variability impact on production lines with
buffers and without buffers. The methodology for determination of buffer size was also
developed. The case studies provided support in showing inactive state bottleneck identification
method better than the active state method.
14
2.4
Simulation study in real-time scenario
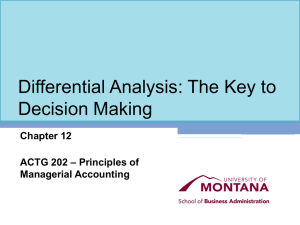
Gaafar and Shaik (1993) developed a shop floor simulation interface (SFSI) which uses
data acquisition system for enhancing the real-time performance of the existing simulation
system. Based on the current job floor status, SFSI detects the problems and updates them. This
method helps to improve the accuracy of the system and real time performance by eliminating
the warm-up period as the simulation can be started with the current state conditions. SFSI
automatically selects the model from simulation database. Figure 2.2 shows the overall system
structure and the logic of SFSI.
Figure 2.2 SFSI structure and functional logic (Gaafar, & Shaik, 1993)
15
Simulation based proactive support tool can be used for shop floor scheduling (Gupta,
Sivakumar, & Sarawgi, 2002). This paper deals with the study carried in plastic processing
section of a private company. The existing problems are high as they have complex product mix,
routing and bad scheduling decisions. So, simulation techniques can be applied to the existing
conditions and the system performance is evaluated. This helps the decision makers to work on
“what now” strategy instead of “what if” analysis.
Discrete event simulation model can be applied to an automated bottleneck analysis to
detect running production constraints (Faget, Eriksson, & Herrmann, 2005). A case study was
conducted in Toyota motor company. The biggest challenge was to educate the decision makers
about the importance of simulation as support tool to detect the production constraints. Design of
experiments is used to suggest improvement alternatives in simulation models. Simulation flow
helps to reduce the analysis phase. The results obtained in the integration of simulation to the
running production system are better accuracy in bottleneck analysis and faster suggestions for
improvements.
Tjahjono and Fernandez (2008) proposed a practical approach to experimentation for the
execution of simulation study in a methodology manner. Due to inadequate experimentation,
even accurate modeling may result in wrong decisions. The methodology is explained with the
case study on engine assembly line. The aim of the simulation study is to improve the
productivity and efficiency of the line. The methodology suggests three stages for increasing the
productivity. They are as follows:
Bottleneck detection
Bottleneck elimination/reduction
Efficiency improvement
16
The conclusion of this approach yields to maximized throughput and provides a different
method to design experimentation.
2.5
Selection of alternative process plan
Zhang and Huang (1994) proposed a fuzzy approach in selecting the process plan for the
manufacturing system. Selection of alternative process plays a vital role in enhancing the overall
system performance. In this approach, a set of fuzzy theory is used to evaluate each process
plan‟s contribution to system performance. According to Zhang and Huang (1994), the selection
of process plans should convince the following objectives:
Reduction in machining time
Minimizing the number of setups
Reducing the amount of processing steps
Reducing the dissimilarity occurring between the different process plans
Initially, a process plan set is identified based on the refinement approach. The set is
combined to minimize the processing resources needed for the system. This method gives better
solutions for selecting process plans than the algorithms provided by Kusiak and Finke (1988).
The presence of fuzzy logic in process plan selection improves the field knowledge.
Sormaz and Khoshnevis (2003) developed a methodology to generate alternative process
plan in the integrated production system. The process design, planning and scheduling are
integrated with the availability of alternative process plan. The generation of alternative process
plan is helpful in real time scenarios for providing feedback on cost in design modifications. The
steps include selection of alternative machining operations, sequencing of machining jobs,
clustering of machining processes and generation of network with process plan. On-time delivery
schedules and effective use of production resources are obtained by minimizing the constraints in
17
production schedules through alternative process plan. The procedure for selecting optimal
process plan is also explained. The outcome of the methodology generated process plan networks
with all available plans for a particular part.
The process plan alternatives have influence on equipment control (Ferreira, & Wysk,
2001).Control and planning of manufacturing requirements does not have adequate resources due
to fixed process plans. In an automated environment, decisions can be made fast and efficient by
using the pre-planned process plan alternatives. The main goals of this work are as follows:
Improve machine utilization
Reduction of in-process inventory
Solving problems such as shop floor disruptions in a quick manner
The performance of the system is analyzed by changing the master production schedule
over an interval of time, considering the parts to be manufacturing and tools needed to process
the parts. However, this method does not consider the quality of alternative process plans.
Ming and Mak (2000) proposed a hybrid Hopfield network-genetic algorithm method for
selecting optimal process plan. There is a complexity in selecting process plan from a set of
Figure 2.3 Example for process plan selection (Ming, & Mak, 2000)
18
available resources. Usually each part may have several process plans to select as shown in
Figure 2.3. So the problem occurs in selecting the suitable process plan for each part. This
method focuses on minimized cost objective to select the process plan. A case study was
conducted to show the advantage of this method over other algorithm approaches by previous
works. Hopfiled network-genetic algorithm provides a better solution in process plan selection
dilemma.
2.6
Research motivation
Most of the previous research works focus on single product line bottleneck cases and
only few works have been carried on bottlenecks in multiple products line. Multiple product line
bottleneck cases are more complicated than the single bottlenecks. Less number of literatures is
published on the shifting bottleneck detection methods and none of them have focused on
multiple product scenarios. Moreover, the bottleneck time has never been considered in selecting
the alternative process plan of the production system. Earlier researches on alternative process
plan gives importance only on minimizing cost and obtaining the target cycle time. The
drawback in these works is that the overall system performance does not have a significant
improvement without considering the bottleneck time of the system. Hence, this research work
spotlights the detection of bottlenecks using inactive state for multiple product line and selection
of alternative process plan in the presence of bottleneck time with cost effective measures.
19
CHAPTER 3
METHODOLOGY
3.1
Introduction
Most industries focus on on-time delivery of the product to the customers. On-time
delivery can be affected by reduction in system performance. The presence of bottleneck
machines in a system is a major reason for reduction in system performance. Two approaches to
the mitigation of bottlenecks are to introduce buffers and to increase capacity at the bottleneck
machines. Buffers are typically effective when there is variance in processing times at each
machine, variability in the material handling time, and unreliable machines. When machine
utilization is high and variability is low, the best method for mitigation of bottleneck is to
increase capacity. A third alternative for mitigating the impact of bottlenecks is to reduce the
number of types of parts that flow through the bottleneck machine by selecting alternate process
plans. The objective of this research is to detect bottleneck machines in systems with multiple
products and select alternate process plans that can lead to improved system performance.
Section 3.2 describes the two types of bottleneck detection methods. The automatic detection of
bottleneck machines using inactive state method for multiple product flow is addressed in section
3.3 and section 3.4. The performance measures used to study the impact of bottleneck machines
in the system are discussed in section 3.5. Then, the methodology for selecting the alternative
process plan is detailed in section 3.6. The final process plan is selected with an objective to
achieve the target cycle time by reducing the bottleneck time of the system.
Notations
ni
-
Number of change of states during the total run time, i ∈ (1,..., n)
Mj
-
Machine, j ∈ (1,..., M)
20
R
-
Total run time
Pk
-
Products, k ∈ (1,..., P)
Te
-
Time interval at eth time
D
-
Demand
us
-
Process plan, s ∈ (1,..., u)
vq
-
Process plan sequence, q ∈ (1,..., v)
t
-
Target cycle time
o
-
Obtained cycle time
BT
-
Bottleneck time of the system
PT
-
Processing time of p product in u process plan
C
-
Cost of p product in u process plan
c
c
th
up
th
th
up
x
-
up
th
1, if particular process plan is selected
0, otherwise
X
ij
1, When state 'i' of machine 'j' is active
0, otherwise
1, When machine 'j' is cause for inactivity of state 'i'
Bij 0, otherwise
Time event matrix, T T 0
Time interval matrix, TI
T
0
T
e
T
(e (e 1))
m1
Machine matrix, M
mM
21
X11
Machine state matrix , Xij
X1M
P11
Product machine matrix , Pkj
P1M
B11
BN matrix, Bij
B1M
X nM
X
n1
P PM
P
P1
BnM
B
n1
n
BN time Bij * T I , j, 1 j M
i 1
Constraints
n
B * T
ij
i 1
R , j, 1 j M
I
T ,M ,X ,B ,R ,P
I
3.2
ij
ij
0
Bottleneck Detection Methods
Various bottleneck detection methods have been described in previous research works.
Some of the bottleneck detection methods are based on utilization by the ratio of cycle time to
the processing time (Delp, Si, Hwang, & Pei, 2003) or determine the overall constraint using
matrix based approach (Luthi, & Haring, 1997). This research mainly involves shifting
22
bottleneck detection method because, in many cases, different machines act as bottlenecks and
cause production delays at different instants (Tamilselvan, Krishnan, & Cheraghi, 2010). All the
methods and case studies are applied to no buffer cases. Roser, Nakano, and Tanaka (2002) gave
the active duration method, which is the first method for shifting bottleneck detection based on
method of average active duration. This method can be used for both steady state and non-steady
state conditions in production lines.
3.2.1 Active Duration Method
The two possible states available in the production system are active states and inactive
states. The active state includes the working state of the system and the inactive state includes
the blocking, idle and failure states of the system. According to Roser, Nakano, and Tanaka
(2001), a bottleneck machine is the one with the longest active duration without any interruption.
Active state duration method is applied to discrete event system for detecting bottlenecks (Roser,
Nakano, & Tanaka, 2001). This method detects the bottleneck in an easier approach and also
helps in improving the overall system performance. This method has shown to have
inconsistencies and is not suitable for BN detection (Tamilselvan, Krishnan, & Cheraghi, 2010).
Figure 3.1 Average active duration bottleneck time chart
23
Figure 3.1 (Roser, Nakano, & Tanaka, 2002) shows the active state duration method
bottleneck chart for the case study of two machines. From Figure 3.1, it can be observed that
Machine 1 is the primary bottleneck as it has the longest active duration. Therefore, B11 =1 at T60
as Machine 1 is the sole bottleneck for 60% of the time. The value of B22=1 and B31=1 as there is
a shifting of bottlenecks between Machine 1 and Machine 2 for the remaining 40% of the time.
Moreover, this method has the high level of confidence for detecting the primary bottleneck
machine in the entire system (Roser, Nakano, & Tanaka, 2001).
3.2.2 Inactive Duration Method for Single Product Flow
According to Tamilselvan, Krishnan, and Cheraghi, (2010), the bottleneck machine is
one which makes other machines in the system to starve or block at any instant. Tamilselvan,
Krishnan, and Cheraghi, (2010) proposed the inactive duration method for detecting shifting
bottlenecks. Inactive states (Xij=0) show starvation or blocking of the machines. Bottleneck
machines are tracked from the bottleneck detection chart using the inactive state approach. The
bottleneck detection chart consists of different state events and different machines for the given
system. If a machine is inactive because of a bottleneck machine which is downstream in the
product flow, then the inactive machine is said to be a blocked machine. Similarly, if an inactive
machine is idle and waiting for a product to arrive from the bottleneck machine the machine is
designated as a starving machine (Tamilselvan, Krishnan, & Cheraghi, 2010). Thus, tracking of
the inactive states is performed by analyzing the machines in both downstream and upstream to
the inactive machine. The bottleneck time of the system is calculated based on the total idle time
and blocked time of all the machines in the system. The inactive state method detects shifting
bottlenecks more accurately than the active state method. Tamilselvan, Krishnan, and Cheraghi,
(2010) also proposed four new bottleneck characteristics to identify the different types of
24
bottleneck problems and proposed control strategies to mitigate its impacts. However,
Tamilselvan, Krishnan, and Cheraghi, (2010) restricted their algorithms and definitions to
manufacturing systems with single product flow without buffers in the system.
3.3
Inactive Duration Method for Multiple Product Flow
Tamilselvan, Krishnan, and Cheraghi, (2010) did not address the tracking of bottleneck
machines for mixed model production line using the inactive state bottleneck detection method.
In multiple product flow, there are multiple products which flow through the system each with its
own unique process sequences. The inactive state duration method is modified to detect
bottlenecks in multi-product systems. In the presence of multiple products, bottleneck
identification is more complicated than the single product flow. The bottleneck time of the
system is identified based on idle time and blocked time of the machines in the bottleneck time
chart and the processing time of the machines are identified in processing time chart. The
processing time chart is similar to Gantt chart and it displays production schedule for the
manufacturing system. In the processing time chart, the products are color coded for easy
identification of individual products. The tracking of bottleneck machines in the chart is a
complex task for multiple product flow as compared to single product. For idle states, tracking is
done upstream in the bottleneck chart to identify the bottleneck machine. In the case of blocked
states (when a machine has a finished part), tracking is done downstream in the bottleneck chart
to identify the bottleneck machine. In single product flow, all idle times are considered as
bottleneck time but it is not the same for multiple product flow. Due to several parts being
processed in a particular machine, the machine may have idle time after processing its last
product and that idle time is not considered as bottleneck time for multiple product flow. The
procedure for the inactive duration method for multiple product flow is as follows.
25
Algorithm for Inactive Duration
Step 1: Start
Step 2: Determine T and M
Step 3: Determine TI , X ij and Pkj
Step 4: Set j = 1
Step 5: Set i = 1
Step 6: If
X
ij
= 0, then go to step 7 else go to step 13
Step 7: If state „i‟ of machine „j‟ is blocked then go to step 9 else go to step 8
Step 8: Based on product sequence, back track to upstream machine and go to step 10
Step 9: Based on product sequence, back track to downstream machine and go to step 10
Step 10: If
X
ij
= 0, then go to step 12 else go to step 11
Step 11: Update BN matrix with
B
ij
= 1 and go to step 13
Step 12: Update BN matrix with
B
ij
=0
Step 13: Increment i = i + 1
Step 14: If i <=n, then go to step 6 else go to step 15
Step 15: Increment j = j + 1
Step 16: If j <= M, then go to step 5 else go to step 17
Step 17: Stop
A case study of 3 products and 4 machines is used to illustrate the inactive state
bottleneck detection method:
26
3.3.1 Input Data
Table 3.1 Processing time of products for 3 Products x 4 M/c‟s
Product
Machine
M1
M2
M3
M4
M1
M2
M3
M4
M1
M2
M3
M4
A
B
C
Processing Time
(min)
13
10
12
6
5
10
15
8
7
12
14
6
Table 3.2 Product sequence data for 3 Products x 4 M/c‟s
Product
Process Sequence
A
B
M1 – M2 – M3 – M4
M3 – M4 – M1 – M2
C
M4 – M1 – M2 – M3
Table 3.3 Arrival rate of products in the system
Arrival Rate
Distribution
Normal Distribution
Mean
15 min
Standard Deviation
3 min
Each of the products A, B, and C have deterministic processing times in Machines 1, 2, 3,
4 (Table 3.1). The arrival rate of the products is based on the normal distribution with a mean
27
value of 15 min and standard deviation of 3 min. Table 3.2 explains the process sequence of each
product through the different machines.
3.3.2 Simulation Model
A discrete event simulation model is developed in QUEST.
Assumptions for the Simulation Model
No buffers.
No machine breakdown.
The product demand is fixed.
Material handling time is not considered.
3.3.3 Bottleneck Detection for Multiple Product Flow
Based on a simulation run, the first 9 products and the sequence in which they arrived
into the model are C, B, B, C, C, C, B, A, and A. For purpose of tracking, the products are
identified as follows: C1, B1, B2, C2, C3, C4, B3, A1, and A2. When the simulation is
completed, the results are imported to MS excel and the processing time chart (Figure 3.2) is
developed for the given case study. The bottleneck chart (Figure 3.3) is plotted from a simulation
time of 50 min to the end of the processing time of the 9 products. From the bottleneck time
chart, time event matrix, machine state matrix and product machine matrix are formed.
28
Figure 3.2 Processing time chart for 3 Products x 4 M/c‟s by inactive duration method
Figure 3.3 Bottleneck time chart for 3 Products x 4 M/c‟s by inactive duration method
29
Time event matrix, T 50 53 57 59 67 69 165
1
1
Machine state matrix , Xij
1
0
1
0
1
0
0
1
1
0
C2
B1
Product machine matrix , Pkj
B2
0
1
0
1
1
0
1
1
1
1
1
1
0
0
0
0
1
0
1
0
1
1
1
0
1
1
1
0
1
C2
0
B2
0
0
C2
B2
0
0 B2 0
C2 C2 0
0
0 0
B2 C3 A2
Time interval matrix, TI 0 3 4 2 8 2 12
For instance, it can be observed that X31 = 0 at T57 because machine 1 is waiting for
product B2 to arrive from machine 4. The bottleneck machine is identified by tracking
backwards towards the chart based on the given sequence for the product B. Then, B54 = 1 at T67
because machine 4 is acting as a bottleneck for the product B2. At T94, product C3 is blocked in
machine 2 for 8 min because machine 3 is acting as a bottleneck machine for the product C3.
After finishing the process, product C3 stays in machine 2 and cannot move to machine 3
because product B3 is still being processed in machine 3. When part B3 is completed and moves
to its next destination, then part C3 transfers to machine 3. The duration of product C3 in the
same machine after its process completion is said to be the blocking time. Similarly, the
bottleneck machine matrix (Bij) of the overall system is identified based on the idle time and
blocked time as shown in Figure 3.3. The shifting of bottlenecks occurs throughout the system.
The bottleneck time of each machine is calculated by adding both idle time and blocked time of
the machines as shown in Table 3.4.
30
Table 3.4 Bottleneck time of machines for 3 Products x 4 M/c‟s
Machine
Total idle time
(IT) in min
Machine 1
Machine 2
Machine 3
Machine 4
13
13
20
50
Total blocked
time(BT) in
min
23
13
0
7
Total idle time of the system
=
96 min
Total blocked time of the system
=
43 min
Total bottleneck time of the system =
Bottleneck time
(BNT=IT+BT)
in min
36
26
20
57
139 min
In multiple product flow systems, all idle time events are not considered as the
bottleneck time. From Figure 3.2, machine 1 remains idle for 28 min after product A2 completes
its process. This idle time is not considered as bottleneck time because A2 is the last product in
the system and the idle time of 28 min is ignored. But in the single product flow, all the idle time
are considered as bottleneck time.
3.4
Automatic Bottleneck Detection Method
When the number of products and machines increases, it is very complex to manually
track the bottleneck chart for identifying the bottleneck machines. Therefore, software for the
automatic bottleneck identification is developed using java programming to identify the
bottleneck machines in a quick and easy manner. After completing the simulation, the product
sequence and processing time of products are imported to the java based programming code. The
output from this software provides the details of idle times at each machine, the active states of
each machine, and the bottleneck machines. The advantage of the automatic bottleneck detection
31
method is the reduction of manual tracking time of bottleneck machines in the bottleneck
detection chart.
The result of automatic bottleneck detection method for the case study of 3 Products x 4
M/c‟s is shown below.
Sequence: C- [Machine:4 Activity:0-6, Machine:1 Activity:6-13, Machine:2 Activity:13-25,
Machine:3 Activity:30-44]
Sequence: B- [Machine:3 Activity:15-30, Machine:4 Activity:30-38 Idle Time: 24
BottleNeck:3, Machine:1 Activity:38-43 IdleTime: 25 BottleNeck:4, Machine:2 Activity:43-53
IdleTime: 18 BottleNeck:1]
Sequence: B- [Machine:3 Activity:44-59, Machine:4 Activity:59-67 IdleTime: 9 BottleNeck:3,
Machine:1 Activity:67-72 IdleTime: 10 BottleNeck:4, Machine:2 Activity:72-82 IdleTime: 3
BottleNeck:1]
Sequence: C- [Machine:4 Activity:44-50 IdleTime: 6 BottleNeck:null, Machine:1 Activity:5057 IdleTime: 7 BottleNeck:4, Machine:2 Activity:57-69 IdleTime: 4 BottleNeck:1, Machine:3
Activity:69-83 IdleTime: 10 BottleNeck:2]
Sequence: C- [Machine:4 Activity:67-73, Machine:1 Activity:73-80 IdleTime: 1 BottleNeck:4,
Machine:2 Activity:82-94, Machine:3 Activity:102-116]
Sequence: C- [Machine:4 Activity:75-81 IdleTime: 2 BottleNeck:null, Machine:1 Activity:8188 IdleTime: 1 BottleNeck:4, Machine:2 Activity:94-106, Machine:3 Activity:116-130]
32
Sequence: B- [Machine:3 Activity:87-102 IdleTime: 4 BottleNeck:null, Machine:4
Activity:102-110 IdleTime: 21 BottleNeck:3, Machine:1 Activity:117-122, Machine:2
Activity:127-137]
Sequence: A- [Machine:1 Activity:104-117 IdleTime: 16 Bottleneck: null, Machine:2
Activity:117-127 IdleTime: 11 BottleNeck:1, Machine:3 Activity:130-142, Machine:4
Activity:142-148 IdleTime: 32 BottleNeck:3]
Sequence: A- [Machine:1 Activity:130-143 IdleTime: 8 BottleNeck:null, Machine:2
Activity:143-153 IdleTime: 6 BottleNeck:1, Machine:3 Activity:153-165 IdleTime: 11
BottleNeck:2, Machine:4 Activity:165-171 IdleTime: 17 BottleNeck:3]
Activity means the processing time of the product. For example, consider the last
product A in the system. The processing time of product A in machine 1 is from the 130 to the
143 min. It has an idle time of 8 min but it is not a bottleneck time and the bottleneck is
displayed as null. Then product A moves to machine 2 for processing and machine 2 has an idle
time of 6 min and the bottleneck machine is displayed as machine 1. Similarly, the bottleneck
machines and idle time of each machine for the entire system can be found out automatically
leading to reduction in time taken for tracking the bottleneck states.
3.5
Performance Measures
Performance measures are used to analyze and study the impact of bottleneck shifting in
the overall system. Tamilselvan, Krishnan, and Cheraghi, (2010) proposed four new measures
such as Bottleneck time ratio (α), Bottleneck ratio (γ), Bottleneck shifting frequency (φ) and
Bottleneck Severity ratio (χ) to identify bottleneck characteristics. These existing measures
address only the bottleneck shifting in single product flow. To address the more complex
33
situations in a multi-product system, two new performance measures for multiple product flow
are developed:
Contribution Factor (CF)
Value Added Ratio (VAR)
The existing measures for single product flow are not sufficient to analyze the performance
of each product in multiple product flow.
3.5.1 Contribution Factor (CF)
Contribution Factor (CF) is defined as the ratio of bottleneck time of each part to total
bottleneck time in the system and is given by Equation 3.1.
CF =
Bottleneck time of each product
X 100 (3.1)
Total bottleneck time
Contribution factor helps to identify the bottleneck time contribution of each product in
the system. If a product has more bottleneck time than the other products, then the control
strategies can be focused on that product to reduce the bottleneck time and enhance the
performance of the system. In the case study of 3 products and 4 machines, the bottleneck time
of each product are shown in Table 3.5. The idle time and blocked time for each product in every
machine is calculated.
Table 3.5 Bottleneck time of products for 3 Products x 4 M/c‟s
Part A
M1
M2
M3
M4
IT
BT
(min) (min)
0
0
6
3
10
0
24
0
Part B
BNT
(min)
0
9
10
24
IT
(min)
10
3
0
26
BT
(min)
8
0
0
7
34
Part C
BNT
(min)
18
3
0
33
IT
(min)
3
4
10
0
BT
(min)
15
10
0
0
BNT
(min)
18
14
10
0
Bottleneck time contribution of Product A
=
43 min
Bottleneck time contribution of Product B
=
54 min
Bottleneck time contribution of Product C
=
42 min
Total bottleneck time in the system
=
139 min
CF for Product A = 43 * 100 = 31%
139
CF for Product B = 54 * 100 = 39%
139
CF for Product C = 42 * 100 = 31%
139
From the above calculation, it can be inferred that the product B has more bottleneck time than
the other products.
3.5.2 Value Added Ratio (VAR)
Value Added Ratio (VAR) is defined as the ratio of active state time in the system to the
inactive state time in the system. Active state time refers to the total processing time of all the
machines. Inactive state time refers to the idle time and blocked time of the system. It is given by
Equation 3.2.
VAR =
Active state time
.(3.2)
Inactive state time
Value added ratio shows the effectiveness of time spent in the system. This measure helps to
improve the quality of the entire production system. It analyzes the value added and non-value
added activities in the system for enhancing the system performance. For the case study of 3
products and 4 machines, the value added ratio is calculated below.
35
Active state time
=
266 min
Inactive state time
=
139 min
VAR = 266 = 266 : 139
139
= 1 : 139
266
= 1 : 0.52
For every one minute of value added activity, there is 0.52 min of non-value added
activity taking place in this case study. The obtained VAR value suggests that more time is spent
on value added activities for the given case study. It is the quality measure for improvements of
all the processes in the system.
The modified inactive state method for automatic bottleneck detection can be
implemented in live simulation scenario of the job floor production. The selection of alternative
process plan in the presence of bottleneck is employed with this proposed method.
3.6
Selection of Alternative Process Plan in Real Time Production Scenario
Process plan gives the process sequences and the production activities to be carried on the
products in the manufacturing system. They play a vital role in on-time delivery and good quality
of the products. The process plans are selected based on the objective of minimized cost. When
the selected initial process plan exceeds the target cycle time (tc), then there is a need to select
alternative process plans. The alternative process plan should complete the products on or before
the given cycle time and also reduce the bottleneck time in the system. In this research, selection
of alternative process plans to mitigate the impact of bottlenecks and to attain the desired cycle
time with cost effective measures is addressed.
36
Objective
Min BT
k
Min
s
q
[(PTupv * Cupv)]
p=1 u=1 v=1
Constraints
k
s
q
[(PTupv * Dp) * xup]
p=1 u=1 v=1
tc
s
xup =1 p
u=1
The OR model above is a multi-objective function. The first objective is to minimize the
bottleneck time of the system and the second objective is to select the process plan based on
minimized machining cost of the products. The first constraint describes that the selected
processing time of the process plans should be less than the target cycle time. The second
constraint ensures that only one process plan should be selected for each product.
The flowchart for selecting the alternative process plan in the presence of bottleneck is given
below. The flowchart is discussed in detail on the following sections with the case study of 3
products and 6 machines.
37
Set target cycle time(tc)
Input process sequence &
machining cost of each product
Select initial process plan
(Min cost objective)
Run simulation
Detect bottlenecks & Obtain
performance measures
NO
Is oc > tc
YES
Select alternative process plan
(Min penalty cost of machining)
Accept the process plan
Figure 3.4 Flowchart for selecting alternative process plan
3.6.1 Initial Process Plan Selection
The products A, B and C have 3 different machining sequences for processing. The target
cycle time (tc) of the production system is assumed to be 460 min. so the process plan selected
for the three products should finish processing the jobs before or at the given cycle time. The
system focuses more on cost parameter. Initially the process plan is selected based on the
objective of minimization of machining cost. The machining cost/min for all the products in each
machine is given in Table 3.6.
38
Table 3.6 Machining cost/min of products for 3 Products x 6 M/c‟s
Product
A
B
C
Machine
Cost/min ($)
M1
M2
M3
M4
M5
M6
M1
M2
M3
M4
M5
M6
M1
M2
M3
M4
M5
M6
4
4
5
3
8
6
5
3
2
8
6
5
8
6
3
5
5
10
Alternative process plans for Product A:
M2 – M4 – M3 – M1 – M6.
M5 – M3 – M6 – M1.
M6 – M3 – M4 – M5 – M1.
Alternative process plans for Product B:
M1 – M2 – M3 – M4 – M5 – M6.
M4 – M2 – M3 – M5 – M6.
M2 – M5 – M3 – M6 – M1.
39
Alternative process plans for Product C:
M6 – M3 – M5 – M1 – M2 – M4.
M5 – M2 – M6 – M3 – M4.
M5 – M6 – M1 – M3 – M4.
Considering the first machining sequence of product A, the total cost of the product in
that particular sequence is Σ [(PA2* CA2) + (PA4* CPA4) + (PA3* CA3) + (PA1* CA1) + (PA6* CA6)].
Where,
PA2 is the processing time of product A in machine 2 and CA2 is the machining cost of
product A in machine 2. The processing time of all the products in their respective machines is
given in Table 3.9. Therefore, the total cost of product A in its first machining sequence is
= Σ [(PA2* CA2) + (PA4* CA4) + (PA3* CA3) + (PA1* CA1) + (PA6* CA6)]
= [(20*4) + (15*3) + (30*5) + (20*4) + (20*6)]
= [(80 + 45 + 150 + 80 + 120)]
= $475/product.
Similarly, the total cost of three products A, B and C in their three different sequences are
calculated and shown in Table 3.7.
Table 3.7 Total cost of products in their different sequences for 3 Products x 6 M/c‟s
Product
A
B
M2 – M4 – M3 – M1 – M6
Total
Cost/product ($)
475
M5 – M3 – M6 – M1
540
M6 – M3 – M4 – M5 – M1
525
M1 – M2 – M3 – M4 – M5 – M6
520
Process Sequence
40
C
M4 – M2 – M3 – M5 – M6
535
M2 – M5 – M3 – M6 – M1
430
M6 – M3 – M5 – M1 – M2 – M4
615
M5 – M2 – M6 – M3 – M4
560
M5 – M6 – M1 – M3 – M4
535
Table 3.7 (Contd)
For product A, the first process sequence has the lowest machining cost $475/product as
compared to other two sequences. Similarly process sequence with the lowest machining cost is
selected for both products B and C. The initial product sequence selected for all the three
products are given in Table 3.8.
Table 3.8 Initial product sequence data for 3 Products x 6 M/c‟s
Product
Process Sequence
A
M2 – M4 – M3 – M1 – M6
B
M2 – M5 – M3 – M6 – M1
C
M5 – M6 – M1 – M3 – M4
3.6.1.1 Bottleneck Detection using Inactive State Method
The simulation is executed with the product sequence data, processing time of all the
products in their respective machines (Table 3.9) and arrival rate of the products into the system
(Table 3.10).
Table 3.9 Processing time of products for 3 Products x 6 M/c‟s
Product
Machine
A
M1
M2
M3
41
Processing
Time (min)
20
20
30
M4
M6
M1
M2
M3
M5
M6
M1
M3
M4
M5
M6
B
C
15
20
15
25
30
20
20
20
25
20
20
10
Table 3.9 (Contd)
Table 3.10 Arrival rate of products for 3 Products x 6 M/c‟s
Arrival Rate
Time of arrival
Product
(min)
A1
0
A2
3
A3
9
A4
18
A5
27
B1
39
B2
54
B3
72
B4
93
C1
117
C2
144
C3
174
C4
207
The demand for the system is assumed as 13 products. The analysis of the system
performance takes place between the simulation times of 100min – End of the system. When the
simulation is completed, the processing time chart for this case study is shown in Figure 3.5. The
processing time chart is based on the inactive state duration method.
42
Figure 3.5 Processing time chart for 3 Products x 6 M/c‟s for intial process plan
The automatic bottleneck detection method with the java programming displays the result
in the following sequence:
Sequence: A- [Machine:2 Activity:0-20, Machine:4 Activity:20-35, Machine:3 Activity:35-65,
Machine:1 Activity:65-85, Machine:6 Activity:85-105]
Sequence: A- [Machine:2 Activity:20-40, Machine:4 Activity:40-55 IdleTime: 5 BottleNeck:2,
Machine:3 Activity:65-95, Machine:1 Activity:95-115 IdleTime: 10 BottleNeck:3, Machine:6
Activity:115-135 IdleTime: 10 BottleNeck:1]
Sequence: A- [Machine:2 Activity:40-60, Machine:4 Activity:60-75 IdleTime: 5 BottleNeck:2,
Machine:3 Activity:95-125, Machine:1 Activity:125-145 IdleTime: 10 BottleNeck:3, Machine:6
Activity:145-165 IdleTime: 10 BottleNeck:1]
43
Sequence: A- [Machine:2 Activity:60-80, Machine:4 Activity:80-95 IdleTime: 5 BottleNeck:2,
Machine:3 Activity:125-155, Machine:1 Activity:155-175 IdleTime: 10 BottleNeck:3,
Machine:6 Activity:175-195 IdleTime: 10 BottleNeck:1]
Sequence: A- [Machine:2 Activity:80-100, Machine:4 Activity:100-115 IdleTime: 5
BottleNeck:2, Machine:3 Activity:155-185, Machine:1 Activity:185-205 IdleTime:
10BottleNeck:3, Machine:6 Activity:205-225 IdleTime: 10 BottleNeck:1]
Sequence: B- [Machine:2 Activity:125-150 IdleTime: 25 BottleNeck:null, Machine:5
Activity:150-170, Machine:3 Activity:185-215, Machine:6 Activity:225-245, Machine:1
Activity:245-260 IdleTime: 40 BottleNeck:6]
Sequence: B- [Machine:2 Activity:150-175, Machine:5 Activity:175-195 IdleTime: 5
BottleNeck:2, Machine:3 Activity:215-245, Machine:6 Activity:245-265, Machine:1
Activity:265-280 IdleTime: 5 BottleNeck:6]
Sequence: B- [Machine:2 Activity:185-210 IdleTime: 10 BottleNeck:null, Machine:5
Activity:210-230 IdleTime: 15 BottleNeck:2, Machine:3 Activity:245-275, Machine:6
Activity:275-295 IdleTime: 10 BottleNeck:3, Machine:1 Activity:295-310 IdleTime: 15
BottleNeck:6]
Sequence: B- [Machine:2 Activity:225-250 IdleTime: 15 BottleNeck:null, Machine:5
Activity:250-270 IdleTime: 20 BottleNeck:2, Machine:3 Activity:275-305, Machine:6
Activity:315-335, Machine:1 Activity:335-350]
Sequence: C- [Machine:5 Activity:285-305 IdleTime: 15 BottleNeck:null, Machine:6
Activity:305-315 IdleTime: 10 BottleNeck:5, Machine:1 Activity:315-335 IdleTime:5
BottleNeck:6, Machine:3 Activity:335-360 IdleTime: 30 BottleNeck:1, Machine:4 Activity:360380 IdleTime: 245 BottleNeck:3]
44
Sequence: C- [Machine:5 Activity:305-325, Machine:6 Activity:335-345, Machine:1
Activity:350-370, Machine:3 Activity:370-395 IdleTime: 10 BottleNeck:1,
Machine:4Activity:395-415 IdleTime: 15 BottleNeck:3]
Sequence: C- [Machine:5 Activity:340-360 IdleTime: 15 BottleNeck:null, Machine:6
Activity:360-370 IdleTime: 15 BottleNeck:5, Machine:1 Activity:370-390, Machine:3
Activity:395-420, Machine:4 Activity:420-440 IdleTime: 5 BottleNeck:3]
Sequence: C- [Machine:5 Activity:360-380, Machine:6 Activity:380-390 IdleTime:
10BottleNeck:5, Machine:1 Activity:390-410, Machine:3 Activity:420-445, Machine:4
Activity:445-465 IdleTime: 5 BottleNeck:3]
The idle time and the blocked time of all the machines can be found from the bottleneck
detection chart. The total bottleneck time of the system can be calculated from Table 3.11.
Table 3.11 Bottleneck time of machines for 3 Products x 6 M/c‟s
Machine
Total idle time
(IT) in min
Machine 1
Machine 2
Machine 3
Machine 4
Machine 5
Machine 6
100
0
30
50
25
70
Total blocked
time(BT) in
min
10
40
15
30
70
25
Total idle time of the system
=
275 min
Total blocked time of the system
=
190 min
Total bottleneck time of the system =
465 min
Bottleneck time
(BNT=IT+BT)
in min
110
40
45
80
95
95
3.6.1.2 Performance Measures
The performance measures of initial process plan for 3 Products x 6 M/c‟s case study are
as follows:
45
Contribution Factor (CF):
Table 3.12 Bottleneck time of products for 3 Products x 6 M/c‟s
Part A
M1
M2
M3
M4
M5
M6
IT
(min)
30
0
0
0
0
40
BT
(min)
0
10
0
30
0
0
Part B
BNT
(min)
30
10
0
30
0
40
IT
BT
(min) (min)
70
0
0
30
0
15
0
0
25
55
20
0
Part C
BNT
(min)
70
30
15
0
80
20
Bottleneck time contribution of Product A
=
110 min
Bottleneck time contribution of Product B
=
215 min
Bottleneck time contribution of Product C
=
140 min
Total bottleneck time in the system
=
465 min
IT
(min)
0
0
30
50
0
10
BT
(min)
10
0
0
0
15
25
BNT
(min)
10
0
30
50
15
35
CF for Product A = 110 * 100 = 24%
465
CF for Product B = 215 * 100 = 46%
465
CF for Product C = 140 * 100 = 30%
465
The contribution factor for each product is obtained and the product B has the highest
bottleneck time contribution to the overall production system.
Value Added Ratio (VAR):
Active state time
=
1105 min
Inactive state time
=
465 min
46
VAR = 1105 = 1105 : 465
465
= 1 : 465
1105
= 1 : 0.42
For every one minute of value added activity, there is 0.42 min of non-value added
activity taking place in this case study. More time is spent on value added activities than the nonvalue added activities for the selected process plan. Moreover, the obtained cycle time (470 min)
is greater than the target cycle time (460 min). Therefore, to improve the overall performance of
the system and also to achieve the target cycle, an alternative process plan is needed.
3.6.2 Selection of Alternative Process Plan
The main objective of the alternative process is that it should achieve the target cycle
time. It should also enhance the performance of the overall system by reducing the bottleneck
time in the system. The alternative process plan is selected based on the minimum penalty cost of
the machining for each product in their different sequences.
From Table 3.7, product C has the less penalty cost ($25) for selecting alternative process
plan ($560) from the cost of initial process plan ($535) as compared to other products A and B.
Therefore, the alternative product sequence data is given in Table 3.13.
Table 3.13 Alternative product sequence data for 3 Products x 6 M/c‟s
Product
Process Sequence
A
M2 – M4 – M3 – M1 – M6
B
M2 – M5 – M3 – M6 – M1
C
M5 – M2 – M6 – M3 – M4
47
3.6.2.1 Bottleneck Detection using Inactive State Method
The simulation for the alternative process plan is executed with the input data from
processing time Table 3.14 and arrival rate Table 3.10. The analysis period is same as the initial
process plan analysis time (100 min – End of the system). The Bottleneck time by inactive
duration method for alternative process plan is shown in Figure 3.6.
Table 3.14 Processing time of products for 3 Products x 6 M/c‟s
Product
A
B
C
Machine
Processing Time
(min)
M1
20
M2
20
M3
30
M4
M6
M1
M2
M3
M5
M6
M1
M3
M4
M5
M6
15
20
15
25
30
20
20
20
25
20
20
10
48
Figure 3.6 Processing time chart for 3 Products x 6 M/c‟s for alternative process plan
The automatic bottleneck detection method with the java programming displays the result
for alternative process plan in the following sequence:
Sequence: A- [Machine:2 Activity:0-20, Machine:4 Activity:20-35, Machine:3 Activity:35-65,
Machine:1 Activity:65-85, Machine:6 Activity:85-105]
Sequence: A- [Machine:2 Activity:20-40, Machine:4 Activity:40-55 IdleTime: 5 BottleNeck:2,
Machine:3 Activity:65-95, Machine:1 Activity:95-115 IdleTime: 10 BottleNeck:3, Machine:6
Activity:115-135 IdleTime: 10 BottleNeck:1]
49
Sequence: A- [Machine:2 Activity:40-60, Machine:4 Activity:60-75 IdleTime: 5 BottleNeck:2,
Machine:3 Activity:95-125, Machine:1 Activity:125-145 IdleTime: 10 BottleNeck:3, Machine:6
Activity:145-165 IdleTime: 10 BottleNeck:1]
Sequence: A- [Machine:2 Activity:60-80, Machine:4 Activity:80-95 IdleTime: 5 BottleNeck:2,
Machine:3 Activity:125-155, Machine:1 Activity:155-175 IdleTime: 10 BottleNeck:3,
Machine:6 Activity:175-195 IdleTime: 10 BottleNeck:1]
Sequence: A- [Machine:2 Activity:80-100, Machine:4 Activity:100-115 IdleTime: 5
BottleNeck:2, Machine:3 Activity:155-185, Machine:1 Activity:185-205 IdleTime: 10
BottleNeck:3, Machine:6 Activity:205-225 IdleTime: 10 BottleNeck:1]
Sequence: B- [Machine:2 Activity:125-150 IdleTime: 25 BottleNeck:null, Machine:5
Activity:150-170, Machine:3 Activity:185-215, Machine:6 Activity:225-245, Machine:1
Activity:245-260 IdleTime: 40 BottleNeck:6]
Sequence: B- [Machine:2 Activity:150-175, Machine:5 Activity:175-195 IdleTime: 5
BottleNeck:2, Machine:3 Activity:215-245, Machine:6 Activity:245-265, Machine:1
Activity:265-280 IdleTime: 5 BottleNeck:6]
Sequence: B- [Machine:2 Activity:185-210 IdleTime: 10 BottleNeck:null, Machine:5
Activity:210-230 IdleTime: 15 BottleNeck:2, Machine:3 Activity:245-275, Machine:6
Activity:275-295 IdleTime: 10 BottleNeck:3, Machine:1 Activity:295-310 IdleTime: 15
BottleNeck:6]
Sequence: B- [Machine:2 Activity:225-250 IdleTime: 15 BottleNeck:null, Machine:5
Activity:250-270 IdleTime: 20 BottleNeck:2, Machine:3 Activity:275-305, Machine:6
Activity:305-325 IdleTime: 10 BottleNeck:3, Machine:1 Activity:325-340 IdleTime: 15
BottleNeck:6]
50
Sequence: C- [Machine:5 Activity:285-310 IdleTime: 15 BottleNeck:null, Machine:2
Activity:310-335 IdleTime: 60 BottleNeck:5, Machine:6 Activity:335-350 IdleTime:10
BottleNeck:2, Machine:3 Activity:350-370 IdleTime: 45 BottleNeck:6, Machine:4 Activity:370385 IdleTime: 255 BottleNeck:3]
Sequence: C- [Machine:5 Activity:310-335, Machine:2 Activity:335-360, Machine:6
Activity:360-375 IdleTime: 10 BottleNeck:2, Machine:3 Activity:375-395 IdleTime: 5
BottleNeck:6, Machine:4 Activity:395-410 IdleTime: 10 BottleNeck:3]
Sequence: C- [Machine:5 Activity:335-360, Machine:2 Activity:360-385, Machine:6
Activity:385-400 IdleTime: 10 BottleNeck:2, Machine:3 Activity:400-420 IdleTime: 5
BottleNeck:6, Machine:4 Activity:420-435 IdleTime: 10 BottleNeck:3]
Sequence: C- [Machine:5 Activity:360-385, Machine:2 Activity:385-410, Machine:6
Activity:410-425 IdleTime: 10 BottleNeck:2, Machine:3 Activity:425-445 IdleTime: 5
BottleNeck:6, Machine:4 Activity:445-460 IdleTime: 10 BottleNeck:3]
The bottleneck time for the entire system and the individual machines are given in Table 3.15.
Table 3.15 Bottleneck time of machines for 3 Products x 6 M/c‟s
Machine
Total idle time
(IT) in min
Total blocked
time(BT) in min
Bottleneck time
(BNT=IT+BT)
in min
Machine 1
Machine 2
Machine 3
Machine 4
Machine 5
Machine 6
95
15
30
50
25
100
0
40
10
30
55
0
115
55
40
80
80
100
Total idle time of the system
=
315 min
Total blocked time of the system
=
135 min
51
Total bottleneck time of the system =
450 min
3.6.2.2 Performance Measures
The performance measures of alternative process plan for 3 Products x 6 M/c‟s case study
are as follows:
Contribution Factor (CF):
Bottleneck time contribution of Product A
=
110 min
Bottleneck time contribution of Product B
=
215 min
Bottleneck time contribution of Product C
=
125 min
Total bottleneck time in the system
=
450 min
Table 3.16 Bottleneck time of products for 3 Products x 6 M/c‟s
M1
M2
M3
M4
M5
M6
Part A
IT
BT
BNT
(min) (min) (min)
30
0
30
0
10
10
0
0
0
0
30
30
0
0
0
40
0
40
IT
(min)
65
0
0
0
25
30
Part B
BT
BNT
(min) (min)
0
65
30
30
10
10
0
0
55
80
0
30
CF for Product A = 110 * 100 = 24%
450
CF for Product B = 215 * 100 = 48%
450
CF for Product C = 125 * 100 = 28%
450
52
IT
(min)
0
15
30
50
0
30
Part C
BT
BNT
(min) (min)
0
0
0
15
0
30
0
50
0
0
0
30
Value Added Ratio (VAR):
Active state time
=
1215 min
Inactive state time
=
450 min
VAR = 1215 = 1215 : 450
450
= 1 : 450
1215
= 1 : 0.37
For every one minute of value added activity, there is 0.37 min of non-value added
activity taking place in the given case study. More time is spent on value added activities than
the non-value added activities for the selected alternative process plan.
3.7
Conclusion
From the case studies, it can be inferred that the selected alternative process plan
achieves the target cycle time of 460 min. For the alternative process plan, the value added ratio
is better and the total bottleneck time is less as compared to the initial process plan. Therefore,
the case study shows the methodology of selecting alternative process plan at the minimum cost
and also achieving the target cycle time. The bottleneck detection methodology of using inactive
state duration for multiple product flow with various case studies is discussed in the following
chapter.
53
CHAPTER 4
CASE STUDIES
This chapter explains different case studies based on bottleneck detection methodology
using inactive state duration method for multiple product flow. The case studies are compared
with different performance measures for initial process plan and alternative process plan. The
comparison charts are developed for showing the results of the selection of alternative process
plans. The case settings considered are 3 Products x 4 M/c‟s, 3 Products x 6 M/c‟s and 5
products x 10 M/c‟s.
4.1
Case Study - I (3 Products x 6 M/c’s)
4.1.1 Bottleneck time charts
Figure 4.1 Bottleneck time chart of 3 Products x 6 M/c‟s for intial process plan
54
Figure 4.2 Bottleneck time chart of 3 Products x 6 M/c‟s for alternative process plan
The Bottleneck time chart of 3 Products x 6 M/c‟s for both initial process plan and
alternative process plan is shown in Figure 4.1 and Figure 4.2. These bottleneck time charts are
useful in finding the idle time and blocked time of each machines and also for the overall system.
The total bottleneck time of the system can be calculated from these bottleneck charts.
4.1.2 Comparison of bottleneck characteristics
The impact of bottleneck shifting can be identified by bottleneck characteristic measures.
In addition to the new two performance measures like contribution factor and value added ratio,
four measures proposed by Tamilselvan, Krishnan, and Cheraghi, (2010) such as Bottleneck time
ratio (α), Bottleneck ratio (γ), Bottleneck shifting frequency (φ) and Bottleneck Severity ratio (χ)
55
are used to compare the bottleneck characteristics between the initial process plan and alternative
process plan in the 3 Products x 6 M/c‟s case study.
Table 4.1 Bottleneck Characteristics for 3 Products x 6 M/c‟s
Initial
Process Plan
Results
Alternative
Process Plan
# of Machines
# of BN Machines
6
6
6
6
BN Time
# of Inactive Durations
# of BN Shifts
α
τ
φ
χ
465
38
32
1
1
0.81
0.842
450
42
32
0.97
1
0.81
0.83
From Table 4.1, it can be interpreted that the bottleneck time ratio, bottleneck severity
ratio and bottleneck time are less for alternative process plan in comparison with initial process
plan. Therefore, alternative process plan will provide better system performance than the initial
process plan.
4.2
Case Study - II (3 Products x 4 M/c’s)
4.2.1 Bottleneck Characteristics
Table 4.2 shows the bottleneck characteristics for 3 Products x 4 M/c‟s case study for
studying the impact of bottleneck shifting in the system.
Table 4.2 Bottleneck Characteristics for 3 Products x 4 M/c‟s
Results
# of Machines
# of BN Machines
BN Time
56
Case Study
Values
4
4
139
# of Inactive Durations
# of BN Shifts
α
τ
φ
χ
Table 4.2 (Contd)
4.3
22
19
0.81
1
0.78
0.86
Case Study - III (5 Products x 10 M/c’s)
A case study of 5 products and 10 machines with the inactive state bottleneck detection
method is as follows:
4.3.1 Input Data
Table 4.3 Processing time of products for 5 Products x 10 M/c‟s
Product
A
B
C
Machine
M1
M2
M3
Processing
Time (min)
13
10
12
M4
M5
M6
M8
M10
M2
M3
M4
M5
M6
M7
M9
M1
M2
M5
M6
M7
M8
6
4
7
10
5
5
10
15
8
6
4
5
7
12
2
15
3
5
57
M9
M10
M1
M2
M3
M4
M5
M6
M7
M8
M9
M10
M1
M3
M5
M7
M8
M9
M10
D
E
14
6
4
6
8
10
2
5
7
6
8
10
8
4
5
6
3
10
9
Table 4.3 (Contd)
Table 4.4 Product sequence data for 5 Products x 10 M/c‟s
Product
Process Sequence
A
M2 – M4 – M6 – M8– M10 – M1 – M3 – M5
B
M7 – M3 – M5 – M2 – M6 – M4 – M9
C
M5 – M1 – M9 – M10 – M7 – M8 – M2 – M6
D
M1 – M2 – M3 – M4 – M5 – M6 – M7 – M8 – M9 – M10
E
M8 – M10 – M7 – M1 – M9 – M3 – M5
Table 4.5 Arrival rate of products in the system
Arrival Rate
Distribution
Normal Distribution
58
Mean
20 min
Standard Deviation
3 min
Table 4.5 (Contd)
The products A, B, C, D, E have deterministic processing times in Machines 1, 2, 3, 4, 5,
6, 7, 8, 9, 10. The processing time differs in each machine for a particular product as shown in
Table 4.3. The arrival rate of the products is based on the normal distribution with mean value of
20 min and standard deviation of 3 min. Table 4.4 explains the routing sequence of each product
through different machines.
Figure 4.3 Processing time chart for 5 Products x 10 M/c‟s by inactive duration method
59
Figure 4.4 Bottleneck time chart of 5 Products x 10 M/c‟s by inactive duration method
The bottleneck machines of the overall system are identified based on the idle time and
blocked time as shown in Figure 4.4.
The result of automatic bottleneck detection method for case study of 5 Products x 10
M/c‟s is shown below.
Sequence:E- [Machine:8 Activity:0-3, Machine:10 Activity:3-12, Machine:7 Activity:12-18,
Machine:1 Activity:18-26, Machine:9 Activity:26-36, Machine:3 Activity:36-40, Machine:5
Activity:41-46]
60
Sequence:C- [Machine:5 Activity:20-22, Machine:1 Activity:26-33, Machine:9 Activity:36-50,
Machine:10 Activity:50-56 IdleTime: 38 BottleNeck:9, Machine:7 Activity:56-59 IdleTime: 38
BottleNeck:10, Machine:8 Activity:59-64, Machine:2 Activity:64-76, Machine:6 Activity:76-91]
Sequence:C- [Machine:5 Activity:39-41 IdleTime: 17 Bottleneck: null, Machine:1 Activity:4148 IdleTime: 8 BottleNeck:5, Machine:9 Activity:50-64, Machine:10 Activity:68-74, Machine:7
Activity:74-77, Machine:8 Activity:77-82 IdleTime: 13 BottleNeck:7, Machine:2 Activity:82-94
IdleTime: 6 BottleNeck:8, Machine:6 Activity:94-109 IdleTime: 3 BottleNeck:2]
Sequence:E- [Machine:8 Activity:56-59 IdleTime: 53 Bottleneck: null, Machine:10
Activity:59-68 IdleTime: 3 BottleNeck:8, Machine:7 Activity:68-74 IdleTime: 9 BottleNeck:10,
Machine:1 Activity:74-82 IdleTime: 26 BottleNeck:7, Machine:9 Activity:82-92 IdleTime: 18
BottleNeck:1, Machine:3 Activity:92-96 IdleTime: 52 BottleNeck:9, Machine:5 Activity:96-101
IdleTime: 50 BottleNeck:3]
Sequence:D- [Machine:1 Activity:82-86, Machine:2 Activity:94-100, Machine:3 Activity:100108 IdleTime: 4 BottleNeck:2, Machine:4 Activity:108-118, Machine:5 Activity:119-121,
Machine:6 Activity:121-126 IdleTime: 12 BottleNeck:5, Machine:7 Activity:126-133 IdleTime:
49 BottleNeck:6, Machine:8 Activity:133-139 IdleTime: 51 BottleNeck:7, Machine:9
Activity:140-148, Machine:10 Activity:148-152 IdleTime: 2 BottleNeck:9]
Sequence:D- [Machine:1 Activity:100-104 IdleTime: 14 Bottleneck: null, Machine:2
Activity:104-110 IdleTime: 4 BottleNeck:1, Machine:3 Activity:110-118 IdleTime: 2
BottleNeck:2, Machine:4 Activity:118-128, Machine:5 Activity:128-130 IdleTime:7
BottleNeck:4, Machine:6 Activity:130-135 IdleTime: 4 BottleNeck:5, Machine:7 Activity:135-
61
142 IdleTime: 2 BottleNeck:6, Machine:8 Activity:142-148 IdleTime: 3 BottleNeck:7,
Machine:9 Activity:148-156, Machine:10 Activity:156-160 IdleTime: 4 BottleNeck:9]
Sequence:C- [Machine:5 Activity:117-119 IdleTime: 16 Bottleneck: null, Machine:1
Activity:119-126 IdleTime: 15 BottleNeck:5, Machine:9 Activity:126-140 IdleTime:34
BottleNeck:1, Machine:10 Activity:140-146 IdleTime: 66 BottleNeck:9, Machine:7
Activity:146-149 IdleTime: 4 BottleNeck:10, Machine:8 Activity:149-154 IdleTime: 1
BottleNeck:7, Machine:2 Activity:154-166 IdleTime: 5 BottleNeck:8, Machine:6 Activity:166181 IdleTime: 4 BottleNeck:2]
Sequence:A- [Machine:2 Activity:139-149 IdleTime: 29 Bottleneck: null, Machine:4
Activity:149-155 IdleTime: 21 BottleNeck:2, Machine:6 Activity:155-162 IdleTime:20
BottleNeck:4, Machine:8 Activity:162-172 IdleTime: 8 BottleNeck:6, Machine:10 Activity:172177 IdleTime: 12 BottleNeck:8, Machine:1 Activity:177-190 IdleTime: 51 BottleNeck:10,
Machine:3 Activity:190-202 IdleTime: 14 BottleNeck:1, Machine:5 Activity:202-206 IdleTime:
19 BottleNeck:3]
Sequence:B- [Machine:7 Activity:157-161 IdleTime: 8 Bottleneck: null, Machine:3
Activity:161-176 IdleTime: 43 BottleNeck:7, Machine:5 Activity:176-181 IdleTime: 46
BottleNeck:3, Machine:2 Activity:181-191 IdleTime: 15 BottleNeck:5, Machine:6Activity:191197 IdleTime: 10 BottleNeck:2, Machine:4 Activity:197-205 IdleTime: 42 BottleNeck:6,
Machine:9 Activity:211-216]
Sequence:C- [Machine:5 Activity:181-183, Machine:1 Activity:190-197, Machine:9
Activity:197-211 IdleTime: 41 BottleNeck:1, Machine:10 Activity:211-217 IdleTime:34
BottleNeck:9, Machine:7 Activity:217-220 IdleTime: 56 BottleNeck:10, Machine:8
62
Activity:220-225 IdleTime: 48 BottleNeck:7, Machine:2 Activity:225-237 IdleTime: 15
BottleNeck:8, Machine:6 Activity:237-252 IdleTime: 14 BottleNeck:2]
Sequence:A- [Machine:2 Activity:200-210 IdleTime: 9 Bottleneck: null, Machine:4
Activity:210-216 IdleTime: 5 BottleNeck:2, Machine:6 Activity:216-223 IdleTime: 19
BottleNeck:4, Machine:8 Activity:225-235, Machine:10 Activity:235-240 IdleTime: 18
BottleNeck:8, Machine:1 Activity:240-253 IdleTime: 43 BottleNeck:10, Machine:3
Activity:253-265 IdleTime: 14 BottleNeck:1, Machine:5 Activity:265-269 IdleTime: 21
BottleNeck:3]
Sequence:B- [Machine:7 Activity:220-224, Machine:3 Activity:224-239 IdleTime:
22BottleNeck:7, Machine:5 Activity:239-244 IdleTime: 33 BottleNeck:3, Machine:2
Activity:244-254 IdleTime: 7 BottleNeck:5, Machine:6 Activity:254-260 IdleTime:
2BottleNeck:2, Machine:4 Activity:260-268 IdleTime: 44 BottleNeck:6, Machine:9
Activity:268-273 IdleTime: 52 BottleNeck:4]
The bottleneck time for the entire system and the individual machines are given in Table 4.6.
Table 4.6 Bottleneck time of machines for 5 Products x 10 M/c‟s
Machine
Total idle time
(IT) in min
Machine 1
Machine 2
Machine 3
Machine 4
Machine 5
Machine 6
Machine 7
Machine 8
Machine 9
Machine 10
20
34
60
37
66
59
45
24
39
65
Total blocked
time(BT) in
min
13
0
2
6
11
1
0
1
4
0
63
Bottleneck time
(BNT=IT+BT)
in min
33
34
62
43
77
60
45
25
43
65
Total idle time of the system
=
449 min
Total blocked time of the system
=
38 min
Total bottleneck time of the system =
487 min
4.3.2 Performance Measures
The performance measures of alternative process plan for 5 Products x 10 M/c‟s case
study are as follows:
Contribution Factor (CF):
Bottleneck time contribution of Product A
=
116 min
Bottleneck time contribution of Product B
=
85 min
Bottleneck time contribution of Product C
=
146 min
Bottleneck time contribution of Product D
=
68 min
Bottleneck time contribution of Product E
=
72 min
Total bottleneck time in the system
=
487 min
Table 4.7 Bottleneck time of products for 5 Products x 10 M/c‟s
M1
M2
M3
M4
M5
M6
M7
M8
M9
M10
IT
(min)
10
0
26
16
24
12
0
7
0
20
Part A
BT
BNT
(min) (min)
0
10
0
0
0
26
0
16
0
24
1
13
0
0
0
7
0
0
0
20
IT
(min)
0
10
8
12
30
12
0
0
8
0
Part B
BT
BNT
(min) (min)
0
0
0
10
0
8
5
17
0
30
0
12
0
0
0
0
0
8
0
0
64
IT
(min)
4
20
0
0
0
31
19
6
14
32
Part C
BT
(min)
5
0
0
0
11
0
0
0
4
0
BNT
(min)
9
20
0
0
11
31
19
6
18
32
Part D
Part E
IT
BT
(min) (min)
M1
0
8
M2
4
0
M3
6
0
M4
9
1
M5
8
0
M6
4
0
M7
8
0
M8
11
1
M9
1
0
M10
7
0
Table 4.7 (Contd)
BNT
(min)
8
4
6
10
8
4
8
12
1
7
CF for Product A =
116
X 100 = 24%
487
CF for Product B =
85
X 100 = 18%
487
CF for Product C =
146
X 100 = 30%
487
CF for Product D =
68
X 100 = 13%
487
CF for Product E =
72
X 100 = 15%
487
IT
(min)
6
0
20
0
4
0
18
0
16
6
BT
(min)
0
0
2
0
0
0
0
0
0
0
Value Added Ratio (VAR):
Active state time
=
706 min
Inactive state time
=
487 min
VAR =
706
= 706 : 487
487
=1:
487
706
= 1 : 0.69
65
BNT
(min)
6
0
22
0
4
0
18
0
16
6
For every one minute of value added activity, there is 0.69 min of non-value added activity
taking place in the given case study. More time is spent on value added activities than the nonvalue added activities for 5 Products x 10 M/c‟s case study.
Table 4.8 shows the bottleneck characteristics for 5 Products x 10 M/c‟s case study for
studying the impact of bottleneck shifting in the system.
Table 4.8 Bottleneck characteristics for 5 Products x 10 M/c‟s
# of Machines
Case Study
Values
10
# of BN Machines
10
BN Time
# of Inactive Durations
# of BN Shifts
τ
φ
χ
487
87
55
1
0.82
0.79
Results
4.4
Conclusion
In this chapter, additional case studies are presented for inactive active state bottleneck
detection method for multiple product flow. Bottleneck characteristics are used for studying the
impact of bottleneck shifting and also compare the performance of initial process plan and
alternative process plan. Research conclusion and future work are discussed in the following
chapter.
66
CHAPTER 5
CONCLUSION AND FUTURE RESEARCH
In this chapter the conclusion of the research work and possible future research are
discussed. Section 5.1 discusses the conclusion of modified inactive state bottleneck detection
methodology and its performance measures. Section 5.2 discusses the scope of future research
work in the bottleneck detection method.
5.1
Conclusion
In this research, a modified inactive state bottleneck detection method was proposed.
Case studies were presented to analyze the methodology. The results obtained through the case
studies provide a strong validation for this proposed methodology. A mathematical
representation of identifying the bottleneck machines was presented in a matrix form. Then, the
bottleneck time was calculated based on the provided mathematical formulation. An automatic
bottleneck detection method using java programming was introduced to reduce the manual
tracking of bottleneck machines in the processing time chart and to identify the bottleneck time
rapidly and easily. Complexity in identifying the bottleneck time for large case studies can be
reduced by automatic bottleneck detection method. In addition to the existing performance
measures, two new measures were proposed to study the characteristics of bottleneck shifting in
multiple product flow. These measures help to capture the impact of shifting bottlenecks in a
manufacturing system.
The next phase of the research shifts to selection of alternative process plan in the
presence of bottleneck to attain the cycle time with cost effective measures using inactive state
bottleneck detection method. The main objective of the proposed mathematical model is to
reduce the bottleneck time and selection of process plan with minimized machining cost of the
67
products. A case study was developed with 3 products having three different process sequences
for each of them. The initial process plan didn‟t meet the target cycle time of 460 min. Therefore,
an alternative process plan was selected based on the minimum penalty cost of the machining for
each product. The goal of plan is to achieve target cycle time and enhance overall system
performance. The results showed that the alternative process plan had reduction in bottleneck
time and better value added ratio as compared to initial process plan.
5.2
Future Research
This research mainly focuses on multiple product flow with deterministic processing time
for each product in their respective machines. The problem scope can be extended with
bottleneck detection methodology of using inactive state duration for multiple product flow in
variability cases. The impact of variability on bottlenecks in multiple product flow can be
studied. It may even lead to study the performance on the production system with determination
of buffer size in the multiple product flow. Moreover, material handling time can be considered
with AGV systems in the manufacturing system for the proposed inactive state bottleneck
methodology. Thus, the research work will act as a base for future works on different bottleneck
detection methods in multiple product flow.
68
REFERENCES
69
REFERENCES
Aneja, Y. P., and Punnen, A. P., (1999), “Multiple bottleneck assignment problems”, European
Journal of Operational Research, Vol. 112, No. 1, pp. 167-173.
Berger, A., Bregman, L., and Kogan, Y., (1999), “Bottleneck analysis in multiclass closed
queueing networks and its application”, Queuing Systems, Vol. 31, pp. 217-237.
Chiang, S. Y., Kuo, C. T., and Meerkov, S. M., (1998), “Bottlenecks in markovian production
lines: A systems approach”, IEEE Transactions on Robotics and Automation, Vol. 14, No. 2, pp.
352-359.
Chiang, S. Y., Kuo, C. T., and Meerkov, S. M., (2001), “C-bottlenecks in serial production lines:
Identification and application”, Mathematical Problems in Engineering, Vol. 7, pp. 543-578.
Drake, G. R., and Smith, J. S., (1996), “Simulation system for real-time planning, scheduling and
control”, Proceedings of the Winter Simulation Conference, pp. 1083-1090.
Faget, P., Eriksson, U., and Herrmann, F., (2005), “Applying discrete event simulation and an
automated bottleneck analysis as an aid to detect running production constraints”, Proceedings of
the Winter Simulation Conference, pp. 1401-1407.
Ferreira, J. C. E., and Wysk, R. A., (2001), “An Investigation of the influence of alternative
process plans on equipment control”, Journal of Manufacturing Systems, Vol. 19, No. 6, pp. 393406.
Gaafar, L. K., and Shaik, J., (1993), “Automatic model initialization for real-time decision
support”, Proceedings of the Winter Simulation Conference, pp. 875-881.
Goldratt, E. M., and Cox, J., (1986), The Goal: A process of ongoing improvement, MA: North
River Press.
Goldratt, E. M., and Cox, J., (1992), The Goal: A process of ongoing improvement, MA: North
River Press.
Grosfeld-Nir, A., (1995), “Single bottleneck systems with proportional expected yields and rigid
demand”, European Journal of Operational Research, Vol. 80, No. 2, pp. 297-307.
Gupta, A. K., Sivakumar, A. I., and Sarawgi, S., (2002), “Shop floor scheduling with simulation
based proactive decision support”, Proceedings of the Winter Simulation Conference, pp. 18971902.
Hopp, W. J., and Spearman, M. L., (2001), Factory physics: Foundations of manufacturing
management (2 ed.), NY: Irwin/McGraw-Hill.
Kasemset, C., and Kachitvichyanukul, V., (2007), “Simulation-based procedure for bottleneck
identification”, Proceedings of AsiaSim, CCIS 5, pp. 46-55.
70
Kasemset, C., and Kachitvichyanukul, V., (2008), “Simulation-based procedure for
implementing theory of constraints: Extension for cases with multiple bottlenecks”, Proceedings
of the 9th Asia Pasific Industrial Engineering & Management Systems Conference, pp. 18111819.
Knessl, C., and Tier, C., (1998), “Asymptotic approximations and bottleneck analysis in product
form queuing networks with large populations”, Performance Evaluation, Vol. 33, pp. 219-248.
Kuo, C. T., Lim, J. T., and Meerkov, S. M., (1996), “Bottlenecks in serial production lines: A
system-theoretic approach”, Mathematical Problems in Engineering, Vol. 2, pp. 233-276.
Kusiak, A., and Finke, G., (1988), “Selection of process plans in automated manufacturing
systems”, IEEE Journal of Robotics and Automation, Vol. 4, No. 4, pp. 397-402.
Law, A. M., and Kelton, D. W., (1991), Simulation modeling & analysis, Mcgraw Hill.
Law, A. M., and Kelton, D. W., (2000), Simulation modeling & analysis, Mcgraw Hill.
Lawrence, S. R., and Buss, A. H., (1994), “Shifting production bottlenecks: Causes, cures and
conundrums”, Journal of Production and Operations Management, Vol. 3, No. 1, pp. 21-37.
Lawrence, S. R., and Buss, A. H., (1995), “Economic analysis of production bottlenecks”,
Mathematical Problems in Engineering, Vol. 1, No. 4, pp. 341-369.
Lee, H., and Kim, S. S., (2001), “Integration of process planning and scheduling using
simulation based genetic algorithms”, The International Journal of Advanced Manufacturing
Technology, Vol. 18, No. 8, pp. 586-590.
Li, L., Chang, Q., and Ni, J., (2008), “Data driven bottleneck detection of manufacturing
systems”, International Journal of Production Research, Vol. 47, No. 18, pp. 5019-5036.
Ming, X. G., and Mak, K. L., (2000), “A Hybrid Hopfield network-genetic algorithm approach
to optimal process plan selection”, International Journal of Production Research, Vol. 38, No. 8,
pp. 1823-1839.
Roser, C., Nakano, M., and Tanaka, M., (2001), “A Practical bottleneck detection method”,
Proceedings of the Winter Simulation Conference, pp. 949-953.
Roser, C., Nakano, M., and Tanaka, M., (2002), “Shifting bottleneck detection”, Proceedings of
the Winter Simulation Conference, pp. 1079-1086.
Roser, C., Nakano, M., and Tanaka, M., (2003), “Comparison of bottleneck detection methods fo
AGV systems”, Proceedings of the Winter Simulation Conference, pp. 1192-1198.
Sengupta, S., Das, K., and VanTil, R. P., (2008), “A New method for bottleneck detection”,
Proceedings of the Winter Simulation Conference, pp. 1741-1745.
Sormaz, D. N., and Khoshnevis, B., (2003), “Generation of alternative process plans in
integrated manufacturing systems”, Journal of Intelligent Manufacturing, Vol. 14, pp. 509-526.
71
Tamilselvan, P., Krishnan, K., and Cheraghi, H., (2010), “Measurement of shifting bottlenecks in
a non-buffer production system”, Proceedings of the Industrial Engineering Research
Conference.
Tiwari, M. K., and Vidyarthi, N. K., (1998), “An Integrated approach to solving the process plan
selection problem in an automated manufacturing system”, International Journal of Production
Research, Vol. 36, No. 8, pp. 2167-2184.
Tjahjono, B., and Fernandez, R., (2008), “Practical approach to experimentation in a simulation
study”, Proceedings of the Winter Simulation Conference, pp. 1981-1988.
Vilarinho, P. M., and Simaria, A. S., (2002), “A two-stage heuristic method for balancing mixedmodel assembly lines with parallel workstations”, International Journal of Production Research,
Vol. 40, No. 6, pp. 1405-1420.
Wang, Y. C., Zhao, Q. C., and Zheng, D. Z., (2005), “Bottlenecks in production networks: An
Overview”, Journal of Systems Science and Systems Engineering, Vol. 14, No. 3, pp. 347-363.
Zhang, H. C., and Huang, S. H., (1994), “A Fuzzy approach to process plan selection”,
International Journal of Production Research, Vol. 32, No. 6, pp. 1265-1279.
72