Vehicle Tracking system with GPS GSM Interface and Self Created
advertisement

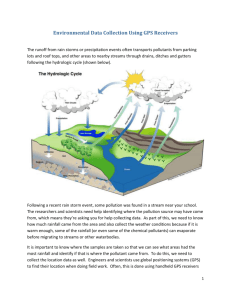
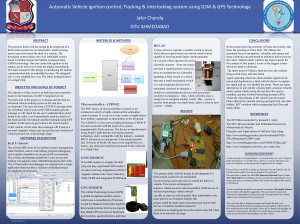
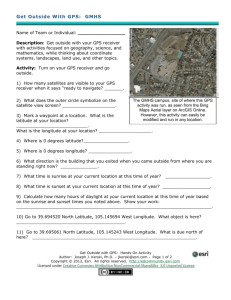
International Journal of Application or Innovation in Engineering & Management (IJAIEM) Web Site: www.ijaiem.org Email: editor@ijaiem.org Volume 3, Issue 4, April 2014 ISSN 2319 - 4847 Vehicle Tracking system with GPS GSM Interface and Self Created Map Modi Nirav D. Department of Electronics, Bharati Vidyapeeth Deemed University, College of Engineering Pune, Pune ABSTRACT Safety and security of vehicle is primary thing for its owner. So, they always look for better mechanism for prevention. Also for company owner or manager it is necessary to know their language vehicle location. In any vehicle tracking unit, there are GPS receiver, controller and GSM module at transmitter side whereas at receiver side, there are GSM module and software system for locating the position of the vehicle. The map of every city is available on the map with co-ordinate of each place. Keyword: GSM, GPS, ARM7, Database, Tracking 1. INTRODUCTION Vehicle tracking technology allows us to see our vehicles locations, speed of the vehicle and other features on the computer screen with a help of GPS (Global Positioning System) technology, GSM network, digital mapping and specialized tracking software. The GPS satellites transmit information like longitude, latitude, altitude, Universal time etc to the GPS receiver. For calculation of this information, at least three GPS satellites are needed. But main disadvantage of GPS is that it need direct line of sight. Its accuracy suffers at indoor locations. Once the receiver knows its position (only latitude and longitude not consider altitude) it is stored in the microcontroller’s memory place in the vehicle. After predefined interval (in this paper interval=15sec), latest location of vehicle is sent to remote location using GSM network. At remote location, PC gets this information and placed on GOOGLE map using internet access whereas in our map internet access doesn’t require. Before the GSM network established, we can get real time tracking using the satellite, which was very expensive. Technologies Involved: GPS – Global Positioning System GSM – Global System of Mobile GIS – Geographical Information system GIS is software with detailed maps of the every place’s with longitude and latitude used to locate the address of a vehicle fitted with GPS system. With proper GIS, we get exact or nearby location of the vehicle. 2. WORKING At transmitter side, we interfaced GPS module and GSM module with ARM controller and displayed the latitude and longitude of place on the LCD. For better performance, interrupt routine of ARM7 is used. After extracting latitude and longitude from receiving data of GPS module, the data is sent to previously saved number using GSM module. Also, I design power supply for GPS module, GSM module and ARM7. The GPS module need +5V supply whereas GSM and ARM7 need +12V power supply. For +5V power supply, 7805 IC is used. At receiver side, GSM module receives position of the vehicle and locates is position on the created map as well as GOOGLE Map. For locating the position on Google map, Google API is used. Here GOOGLE map is used for verification. Figure 1 Block Diagram Volume 3, Issue 4, April 2014 Page 46 International Journal of Application or Innovation in Engineering & Management (IJAIEM) Web Site: www.ijaiem.org Email: editor@ijaiem.org Volume 3, Issue 4, April 2014 ISSN 2319 - 4847 3. IMPLEMENTATION 3.1.1 Flow chart for sending remote location Figure 2 Flow Chart For Send Message At Remote Location Figure 2 shows the steps to send the latitude and longitude information to the remote location. First connect the GSM modem to the UART1 of the ARM7 kit. Connect the GPS modem to UART0 of the ARM7 kit. GPS modem sends the latitude and longitude data along with many other data continuously in NMEA format. This latitude and longitude information from line “$GPGGA” is extracted in ARM7. This extracted data is sent to remotely located server using GSM modem. 3.1.2 Flow Chart for Mapping Position on Customized Map Figure 3 Flow Chart For Mapping Position On Customized Map Volume 3, Issue 4, April 2014 Page 47 International Journal of Application or Innovation in Engineering & Management (IJAIEM) Web Site: www.ijaiem.org Email: editor@ijaiem.org Volume 3, Issue 4, April 2014 ISSN 2319 - 4847 Figure 3 shows the how to locate position on our customize map: First open the VB project and select a form and set its dimension according to map requirement. In VB initialize the GSM modem by sending AT commands and also set baud rate. Open access database which contains the place information which we had taken earlier and read all the entries. Now locate the places on our customize map. As GSM receives any message, we get location information and it indicates the point of location on our customize map. In VB, We convert the latitude and longitude into the degree. So we can continuously trace the vehicle by this system. 4. RESULTS/SIMULATION 4.1 Database Making Using GPS USB Module GPS module gives data in a NMEA format. For building own database/map, I collect the latitude and longitude information of about 50 places and verified this database by revising all the places three times. This process was taken out throughout the year for observing the variation. Some part of the database is shown in table-1. Table 1 Database Collected Using GPS Average Latitude Average Longitude Location Degree Degree Minute Seconds Degree Degree Minute Seconds Scet 21.182215° 21°10'55.97" 72.808458° 72°48'30.44" Big Bazaar 21.159266° 21°09'33.57" 72.770816° 72°46'14.93" Chopati- sugar 'n' spice 21.183984° 21°11'02.34" 72.806354° 72°48'22.87" B> more over bridge Crazy Bite Hotel 21.172424° 21.163960° 21°10'20.72" 21°09'0.25" 72.792437° 72.778992° 72°47'32.77" 72°46'44.11" 4.2 Database Information Verified On Google Earth This information can be used to locate the position of vehicle on the GIS using Google earth which will look like as shown in figure 7 below. Figure 4 Google Earth Verification Volume 3, Issue 4, April 2014 Page 48 International Journal of Application or Innovation in Engineering & Management (IJAIEM) Web Site: www.ijaiem.org Email: editor@ijaiem.org Volume 3, Issue 4, April 2014 ISSN 2319 - 4847 4.3 Proteus Simulation Of The Whole Implementation At Vehicle Side Figure 5 Proteus Simulation Of The Whole Implementation Figure 6 Power Supply Design in Simulation Volume 3, Issue 4, April 2014 Page 49 International Journal of Application or Innovation in Engineering & Management (IJAIEM) Web Site: www.ijaiem.org Email: editor@ijaiem.org Volume 3, Issue 4, April 2014 ISSN 2319 - 4847 4.4 Google Map And created Map Figure 7 Google Map and Our Map 4.5 Map For 10 Meter Range Figure 8 Map For 10 Meter Range Volume 3, Issue 4, April 2014 Page 50 International Journal of Application or Innovation in Engineering & Management (IJAIEM) Web Site: www.ijaiem.org Email: editor@ijaiem.org Volume 3, Issue 4, April 2014 ISSN 2319 - 4847 4.6 Tracking Result Figure 9 Vehicle Location on Google Map as well as Created Map 5. CONCLUSION From this, we get location with less than 10m error in case of slow speed and clear environment. But in cloudy environment, error is higher. Also we get erroneous location in case of the indoor position or area in which more tall buildings are there. References [1] Geolocation and Assisted-GPS ,Goran M. Djuknic1 and Robert E. Richton Bell Laboratories, Lucent Technologies [2] Ambade Shruti Dinkar, S.A Shaikh, “Design and Implementation Of Vehicle Tracking System Using GPS”, Journal of Information Engineering and Applications, Vol 1, No.3, 2011 [3] Principal and application of GSM , by Vijay k. Garg [4] ARM system on chip Architecture , by Steve Furber, [5] Programmer’s guide for ARM controllers by HITEX ltd., U.K. [6] http://www.nxp.com/documents/data_sheet/LPC2141_42_44_46_48.pdf [7] http://www.keil.com/arm/uv-gettingstarted.asp [8] http://www.gpsinformation.org/dale/nmea.htm Volume 3, Issue 4, April 2014 Page 51