Midterm Exam
advertisement

Midterm Exam - Topology
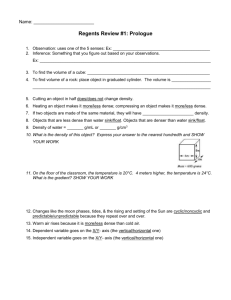
1. Given two points P and Q in R2 , let P Q denote the closed, straight line segment connecting P
and Q (“closed” here means that the end points are included in the interval). For n ∈ N, let
An = (1, 1/n) and let O = (0, 0), B = (1/2, 0) and C = (1, 0). Define X ⊆ R2 to be
A1
A2
..
.
O
B
A. 3
..
C
Figure 1: The space X. There are infinitely many points An , only three are shown in the picture.
Ã
X=
∞
[
!
OAn
∪ BC
n=1
The topology on X is the relative topology induced by the Euclidean topology on R2 . Check if
X is
a) (5 points) Compact.
b) (5 points) Connected.
c) (10 points) Path connected.
2. (10 points) Let X be a compact topological space and for each i ∈ N let Fi ⊆ X be a closed,
nonempty subset of X. Assume further that the subsets Fi are nested in the sense that Fi+1 ⊆ Fi
for i = 1, 2, .... Show that the set F defined by
F =
∞
\
Fi
i=1
is nonempty.
3. (10 points) Prove or disprove the claim: For any map f : [0, 1] → R3 , the space R3 − f ([0, 1]) is
connected.
4. Let X be a topological space and U1 and U2 two dense subsets of X.
a) (15 points) Show that if U1 and U2 are open, then U1 ∩ U2 is also dense in X.
b) (5 points) Find an example where U1 ∩ U2 is not dense in X (in any such example, by part
(a) at least one of the Ui is not open).
5. (10 points) Let d1 and d2 be two metrics on X for which there are constants m, M ∈ R such
that
m · d1 (x, y) ≤ d2 (x, y) ≤ M · d1 (x, y)
∀x, y ∈ X
Show that the two metric topologies induced by d1 and d2 are the same.
1
6. (10 points) Let X and Y be two topological spaces and let X × Y be given the product topology.
Show that X × Y is separable if and only if X and Y are both separable.
7. (10 points) Let (X, ≤) be an ordered set1 . For a ∈ X, let La = {x ∈ X | x < a} and Ra = {x ∈
X | a < x}. Let T be the topology on X generated by the subbasis B defined as
B = {La , Rb ⊆ X | a, b ∈ X}
Show that (X, T ) is a Hausdorff space.
8. (10 points) A topological space X is called locally compact if for every x ∈ X there is a compact
◦
subset A of X with x ∈A. For example Rn is locally compact even though it is not compact.
Show that if X is a locally compact Hausdorff space then the one-point compactification of X
is also Hausdorff.
Bonus questions for extra credit
9. (15 points) This is a generalization of problem (2). Let X be a complete metric space and
Ui , i = 1, 2, ... be a sequence of open and dense subsets of X. Show that ∩∞
i=1 Ui is dense in
X. Notice that the result from (2) extends to infinite intersections at the expense of having to
demand that X is complete.
10. (15 points) Find an example of a noncompact Hausdorff space X whose one-point compactification is not Hausdorff (compare to problem (8)).
1 A set X is called ordered if there is a relation “≤” on X such that for any two x, y ∈ X, either x ≤ y or y ≤ x.
The relation “≤” has to satisfy the following three rules:
(a) x ≤ x.
(b) If x ≤ y and y ≤ x then x = y.
(c) If x ≤ y and y ≤ z then x ≤ z.
One writes x < y to mean x ≤ y and x 6= y.
2
Solutions
1. a) No. The sequence xn = (0.1, 1/(0.1·n)) in X converges to (0.1, 0) which is not in X. Therefor
X is not closed and so it cannot be compact.
b) Yes. Let Y = ∪∞
n=1 OAn . Clearly Y ⊂ X and Y is path connected (since every point of Y
can be path-connected to O). Therefore Y is connected. On the other hand, the closure
of Y is all of X. The reason being that any point (x, 0) ∈ BC is the limit of points in Y ,
namely of the sequence (x, 1/xn). Thus X must be connected.
c) No. Suppose X were path connected. Then we could find a path α : [0, 1] → X with
α(0) ∈ BC and α(1) ∈ Y . Since BC is closed, α−1 (BC) is a closed subset of [0, 1]. Let
t0 ∈ [0, 1] be defined as
t0 = max{t ∈ [0, 1] | α(t) ∈ BC}
(such a maximum exists since α−1 (BC) is closed). Thus α(t) ∈ Y for any t > t0 . Let
x0 = α(t0 ) ∈ BC. Let ε = 0.1 and consider the ball Bx0 (ε). Clearly O ∈
/ Bx0 (ε). By
continuity of α, there is some δ > 0 such that
α(ht0 − δ, t0 + δi) ⊆ Bx0 (ε)
If α(ht0 , t0 +δi) were contained in OAn for a single integer n, then the set {x0 }∪α(ht0 , t0 +δi)
would be path connected. This however is clearly not the case.
Thus there must be at least two different n, say n1 and n2 such that
for 1 = 1, 2
α(ht0 , t0 + δi) ∩ OAni 6= ∅
¡
¢
This would mean that OAn1 ∪ OAn2 ∩Bx0 (ε) is path connected. This is again impossible
since O ∈
/ Bx0 (ε).
Thus no such path α can exist.
∞
2. Let Ui = X − Fi , notice that Ui are open sets. If ∩∞
i=1 Fi = ∅ then ∪i=1 Ui = X. By compactness
N
N
there is a number N ∈ N such that X = ∪i=1 Ui . But then ∩i=1 Fi = ∅ which is a contradiction
since (by the nestedness condition) ∩∞
i=1 Fi = FN .
We conclude that ∩∞
i=1 Fi cannot be the empty set.
3. False. Consider the function f = h ◦ g where g; [0, 1] → [0, 1] × [0, 1] is the space-filling curve
(discussed in class) and h : [0, 1] × [0, 1] → S 2 ⊆ R3 is any map which surjects onto S 2 (there
are many such maps, just think of the (rectangular) wrapper around your favourite (spherical)
chocolate truffle). Then R3 − f ([0, 1]) = R3 − S 2 which is disconnected.
4. a) We start by first proving that a subset U of X is dense if and only if every nonempty open
set V ⊆ X intersects U .
=⇒ Suppose U is dense and V is open and nonempty. If U ∩ V = ∅ then U is contained in
the closed set X − V and so U ⊆ X − V 6= X. This is a contradiction and so it must be that
U ∩ V 6= ∅.
⇐= Suppose that U ∩ V 6= ∅ for every open and nonempty set V . If U 6= X then V = X − U
is a nonempty open set with U ∩ V = ∅. Since this can’t happen by assumption, it must be that
U = X.
Given the claim above, it suffices to show that for every nonempty open set V , the intersection
(U1 ∩ U2 ) ∩ V is nonempty. Since U1 is dense, the set U1 ∩ V is nonempty and open. Therefore,
since U2 is dense the set (U1 ∩ V ) ∩ U2 is nonempty. This completes the proof.
b) Let X = R and take U1 = Q and U2 = R − Q. Both U1 and U2 are dense but U1 ∩ U2 = ∅.
3
5. Let T1 and T2 be the two topologies induced by d1 and d2 . We need to show that T1 = T2 .
T1 ⊆ T2 Let U ∈ T1 and let x ∈ U be an arbitrary element. Then there exists some ε1 > 0
such that
Bx1 (ε1 ) ⊆ U
where Bx1 (ε1 ) = {y ∈ X | d1 (x, y) < ε1 }
From the inequality d2 (x, y) ≤ M d1 (x, y) we see that the ball Bx2 (εx ) = {y ∈ X | d2 (x, y) < εx }
is contained in Bx1 (ε1 ) if we choose εx so that M εx < ε1 . Finding such an εx for each x ∈ U
leads to
[
U=
Bx2 (εx )
x∈U
which shows that U ∈ T2 .
T2 ⊆ T1 Same as above but relies on the other inequality: md1 (x, y) ≤ d2 (x, y)
6. =⇒ Assume that X × Y is separable. Let A ⊆ X × Y be a countable dense set in X × Y .
Let p1 : X × Y → X and p2 : X × Y → Y be the two natural projections and consider the sets
AX = p1 (A) and AY = p2 (A). Clearly these are countable sets and they are dense by the result
from problem 3 in the second graded homework assignment (and from the fact that p1 and p2
are surjective maps).
⇐= Assume that X and Y are separable with countable dense subsets AX ⊆ X and AY ⊆ Y .
Let A = AX × AY ⊆ X × Y . Clearly A is countable. It is also dense since
AX × AY = AX × AY = X × Y
This last line above uses the fact U × V = U ×V , a formula which was the content of an assigned
homework problem from the textbook (see the section on the Product topology).
7. Let a, b ∈ X be two distinct points and let’s suppose that a < b. There are two cases to consider.
If there is a third point c ∈ X with a < c < b then U = Lc and V = Rc are two disjoint open
set which contain a and b respectively.
If there is not such c, then the sets U = Lb and V = Ra are disjoint open sets containing a and
b respectively.
8. Let X ∗ = X ∪ {p} be the one-point compactification of X and let a, b ∈ X ∗ be two distinct
points. If a, b ∈ X then (since X is Hausdorff) there are two open and disjoint set Ua , Ub ⊂ X
containing a and b. By definition, Ua and Ub are also open sets in X ∗ .
◦
◦
If a ∈ X and b = p, let A ⊆ X be a compact set with x ∈A. Set Ua =A and Ub = Y − A. These
are open and disjoint sets containing a and b respectively.
4