10 - Department of Mechanical and Nuclear Engineering
advertisement

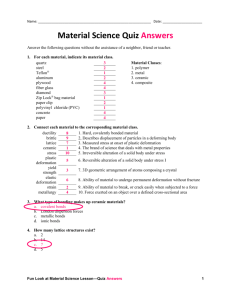
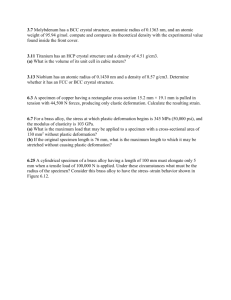
Chapter 11. Mechanical Behavior of Materials 11.1 Introduction ............................................................................................................... 2 11.2. Mechanical Testing .................................................................................................. 2 11.2.1. Uniaxial Tensile Loading Test ......................................................................... 2 11.2.2. Biaxial Testing: Tube Burst ............................................................................. 6 11.2.3. The Von Mises Equivalent Stress .................................................................... 7 11.2.4. Hardness Testing ............................................................................................... 9 11.2.5. Impact Testing ................................................................................................. 10 11.3 Microstructural Aspects of Deformation .............................................................. 12 11.3.1. Critical Resolved Shear Stress and the Yield Stress .................................... 12 11.3.2. Dislocations as cause of work hardening ...................................................... 14 11.3.3. Yield Strength Increase Mechanisms ............................................................ 14 11.4. Creep Deformation ................................................................................................ 15 Larson-Miller Plots................................................................................................... 17 11.4.1 Creep Mechanisms ........................................................................................... 18 Thermally enhanced glide ......................................................................................... 19 Thermally induced dislocation glide (Climb and glide mechanism) ........................ 19 Stress Induced Diffusional Flow Difference (Nabarro-Herring Creep): ................. 19 Coble Creep: ............................................................................................................. 19 11.5. Material Fracture................................................................................................... 20 11.5.1. Ductile Failure by Diffuse Necking: The Considère Criterion ................... 21 11.5.2. Ductile Fracture .............................................................................................. 22 11.5.3. Fracture due to Crack Growth ...................................................................... 24 Griffith Fracture Theory ........................................................................................... 24 Problems .......................................................................................................................... 28 References ........................................................................................................................ 31 Light Water Reactor Materials © Donald Olander and Arthur Motta 2/15/2016 1 11.1 Introduction When in service, materials may be subjected to loads of various intensities, types and duration. The response of the material to these applied loads is termed the mechanical behavior of the material, and it is one of the most important factors to be considered for materials design. The most important questions to be answered are: How and when does the material undergo permanent deformation? When does the material fracture or otherwise fail? These apparently simple questions encompass the range of questions addressed in the field of mechanical behavior of materials. The questions have different answers depending on whether the load is applied quickly or over a period of time, whether the material is pulled in one or in more than one direction at once (uniaxial or multi-axial loading), whether the load is cyclic, and whether there are pre-existing flaws on the material. The ability of the material to resist deformation and failure under such conditions is measured by various mechanical properties, such as strength, ductility and toughness. These macroscopic material properties are discussed in this chapter as well as their link to the material microstructure. 11.2. Mechanical Testing Our quantitative knowledge of materials behavior comes from subjecting such materials to various mechanical tests and deriving measurable material properties. To instruct the discussion, various mechanical tests and their mechanical properties are described in the following 11.2.1. Uniaxial Tensile Loading Test In a tensile test a specimen of uniform cross section (such as a cylinder) is uniaxially loaded and its deformation measured as a function of the applied load (Figure 11.1). Light Water Reactor Materials © Donald Olander and Arthur Motta 2/15/2016 2 Figure 11.1 A schematic depiction of specimen deformation during a uniaxial tensile loading test. In figure 11.1, a specimen of initial gauge length lo and cross-sectional area Ao is subjected to an increasing tensile load P, applied along its axis and the resulting specimen deformation is measured. Upon application of the load the specimen length increases to l and the cross-sectional area is reduced to A. The engineering stress is defined as: eng P Ao (11.1) but since during deformation the specimen cross sectional area is reduced from Ao to A, the true stress is actually P true (11.2) A The engineering strain is eng l lo lo (11.3) However, the true strain is the integral of the increments of strain along the specimen length: l true lo l dl ln l lo (11.4) In a tension test the true strain is always somewhat larger than the engineering strain as long as deformation is uniform along gauge length. From volume conservation Light Water Reactor Materials © Donald Olander and Arthur Motta 3 2/15/2016 Al Aolo (11.5) Note that eng is the strain in the loading direction; by Poisson’s ratio this implies a strain of t=eng in the two transverse directions; if the material is isotropic, volume conservation yields t=-0.5eng. Although volume is conserved during plastic deformation, it is not so during elastic deformation. From (11.5) and (11.4) A A dA (11.6) true ln o A A Ao We are now ready to examine the results of a tensile test. If the applied stress is plotted against the specimen strain we obtain the stress-strain curve, a schematic example of which is shown in Figure 11.2. true-stress/true-strain engineering-stress/engineering-strain UTS y elastic energy uniform f Figure 11.2: Schematic stress-strain behavior for an austenitic steel. As load is applied the material initially starts to deform such that the strain is linearly proportional to the load, according to Hooke’s Law, i.e. Light Water Reactor Materials © Donald Olander and Arthur Motta 2/15/2016 4 E (11.7) where E is Young’s modulus. The region of validity of Hooke’s law is the elastic region. This region is characterized by small reversible deformation: that is, once the load is removed, the strain disappears. In that region, the engineering stress/engineering strain curve is coincident with the true stress/true strain curve. Some typical values of the elastic moduli are shown in Table 11.1. Material E (Gpa) G(GPa) (Poisson's ratio) Aluminum 70.3 26.1 0.345 Gold 78 27 0.44 Iron 211.4 81.6 0.293 Nickel 199.5 76 0.312 Tungsten 411 160.6 0.28 Zirconium 1120 dir 99 32.43 (ave.) Zirconium 0001 dir 125 Table 11.1 Typical elastic and shear moduli and Poisson’s ratios of different materials Eventually the material deformation starts to deviate from Hooke’s law as a result of plastic, or irreversible, deformation. In order to establish a definite onset of plastic deformation, , a minimum value of deviation from Hooke’s law (normally 0.2%) is taken to be the point at which plastic deformation starts to occur. The stress at which this happens is called the yield stress, y, and is an important property of engineered materials. Beyond the yield point, the material starts to deform plastically. The stress required for further deformation continues to increase because of work hardening, (also called strain hardening) often described by an equation of the type: K Tn (11.8) where n is the work hardening coefficient and K is a constant, called the strength coefficient (note that the equation (11.8) describes only the work hardening region, starting at yield.) At any given strain the stress required to continue plastic deformation is called the flow stress. Thus the flow stress is equal to the yield stress at the yield point but is higher than the yield stress in the work hardening region. The material deformation occurring in the elastic region and in the beginning of the work hardening region is uniform, that is, all the material within the gauge section participates equally in the deformation process. At some point diffuse necking sets in, causing deformation to become non-uniform. A small variation in cross sectional area in a section of the material can cause a slightly larger stress, which causes larger deformation in turn further diminishing the area and so on. Light Water Reactor Materials © Donald Olander and Arthur Motta 5 2/15/2016 Once specimen necking starts, the material fails, because the cross-sectional area in the necked region becomes progressively smaller, and thus no additional load is needed to cause further deformation. The stress at which necking occurs is called the ultimate tensile strength of the material or UTS. This is the maximum load-bearing capacity of the material. The strain at which necking occurs is the uniform strain, uniform, and is one measure of the ductility of the material (i.e. how much can the material deform before failing). As deformation proceeds, the neck becomes progressively thinner until the material fractures. The strain at which this occurs is the fracture strain, f, and represents another measure of material ductility. Another quantity that can be obtained from Figure 11.2 is the toughness of the material, represented by the area under the curve, associated with plastic deformation. This area is the full integrated area under the curve minus the shaded region on the right, which represents the elastic energy stored in the material and which is recovered upon fracture. The more the material can deform before fracturing, the tougher the material is. Notice that in a tensile test the true-stress/true-strain curve is always higher than the engineering stress- engineering strain curve. Although at small strains the two curves are similar, as the strains become larger they start to deviate from each other, with the truestress/true-strain curve not showing the apparent stress decrease shown in the engineering curve. 11.2.2. Biaxial Testing: Tube Burst Although the uniaxial tensile test described above is experimentally convenient and its theoretical interpretation is made straightforward by the fact that there is only one nonzero component of the stress tensor (the normal stress in the direction of the stress, xx), the relevant states of stress for the loading of fuel cladding loading and other core materials are often different and exhibit greater degree of stress triaxiality. For example the stress-state of fuel-element cladding loaded internally by fission-gas pressure more closely resembles that in a long thin-walled cylindrical tube closed at both ends and pressurized by a gas. This state of stress is a biaxial state of stress, in which the cladding wall is simultaneously stressed in the axial and hoop directions. Such a state of stress is best studied by a burst test. Creep rupture testing of unirradiated and irradiated steel tubing has also been performed by pressurizing closed tubing with an inert gas. According to elasticity theory (see equations 6.32-6.34, Chapter 6) the stresses in such a condition (thin wall tubing) are pR t Light Water Reactor Materials © Donald Olander and Arthur Motta 2/15/2016 (11.9) 6 pR 2t r 0 where p is the internal pressure, R is the tube radius and t is the tube thickness. z (11.10) (11.11) To analyze the plastic deformation of the material and to derive a yield condition in such multiaxial stress configurations, it is necessary to define an equivalent stress. 11.2.3. The Von Mises Equivalent Stress By definition, a specimen subjected to uniaxial loading yields when the stress reaches y. When a specimen is subjected to multiaxial loading, a yield criterion based on an equivalent stress must be developed. Such a criterion has been developed by von Mises, and is derived here for the case of the tube burst test. The criterion is based on the principal stresses in a material. [1] Von Mises’ general yield criterion is based on the difference between the total energy density under a multiaxial state of stress Eel and the energy density resulting in the material when subjected to the mean of the three principal stresses, Eel . When this difference reaches a critical value Eel* , i.e., when Eel Eel Eel* (11.12) the material will undergo plastic deformation. The mean of the three principal stresses is given by 1 ( 1 2 3 ) (11.13) 3 . The elastic strain energy Eel as a result of applied stresses is given by equation 6.31: Eel 1 ν 1 2 2 2 σ12 σ 22 σ32 σ1σ 2 σ1σ3 σ 2σ3 σ12 σ13 σ 23 2E E 2G (11.14) which for a solid under hydrostatic stress (no shear stresses) simplifies to Eel 1 ν σ12 σ 22 σ32 σ1σ 2 σ1σ3 σ 2 σ3 2E E (11.15) Grouping the elements together yields the value of the homogeneous (average) elastic energy density Eel 1 2 ( 1 2 3 ) 2 6E Light Water Reactor Materials © Donald Olander and Arthur Motta 2/15/2016 (11.16) 7 Subtracting equation (11.16) from (11.15) we obtain 1 2 2 2 Eel Eel (11.17) ( 1 2 ) ( 2 3 ) ( 1 3 ) 6E By setting equation (11.17) equal to the case where there is only one applied stress allows to obtain the equivalent stress eq 1 2 6E 2 1 eq 6E 2 2 2 ( 1 2 ) ( 2 3 ) ( 1 3 ) (11.18) from where we obtain the von Mises equivalent stress 1/ 2 1 ( 1 2 )2 ( 2 3 ) 2 ( 1 3 ) 2 (11.19) 2 The equivalent stress for the uniaxial tension case can be computed by noting that 1 x ; 2 y 0 and 3 z 0 , which yields eq x . For the tube burst case, substituting equations (11.9) to (11.11) into (11.19) yields eq eq 3 2 (11.20) Since the equivalent stress derived above defines yielding in a multiaxial stress state then equation (11.19) defines a yield locus, which is a surface in three-dimensional space. The yield locus for the von Mises condition for the case in which 3=0 (a plane stress condition) is illustrated in Figure 11.3 Figure 11.3: Yield locus generated by the von Mises equivalent stress criterion [2]. The dotted lines indicate the Tresca yield criterion . Light Water Reactor Materials © Donald Olander and Arthur Motta 2/15/2016 8 For an isotropic material, a uniaxial tensile test results in a strain along the principal stress axis equal to twice that of the transverse directions and thus in the elastic regime 1 2 2 2 3 (11.21) We note here that the yield locus shown in Fig.11.3 is symmetric with respect to the deformation direction, i.e. it is the same in tension or compression as well as along the two orthogonal in-plane directions. This does not always have to be the case, as materials such as zirconium are anisotropic and show higher yield stresses along particular directions of deformation. Clearly, the yield locus depends on the mechanisms of deformation at work and it is possible that the operation of other plastic deformation mechanisms could intervene to cut the yield locus (i.e. achieve plastic deformation at a lower stress than the von Mises criterion). Figure 11.4 shows the yield locus for textured hexagonal close packed sheet material, which is seen not to obey equation (11.19). Shown in Figure 11.4 is also a line showing that under compressive states of stress twinning is favored over slip. Figure 11.4 Yield Loci for slip and twinning in textured hexagonal close packed sheet, after [3] 11.2.4. Hardness Testing Hardness testing is a comparatively easy means to obtain information about the deformation behavior of a material. In hardness testing, an indenter –which can be of various shapes, but typically a ball or a pyramid- is applied with a certain force to a material. The indenter is much harder than the material to be tested, so that only the material tested plastically deforms. For a given force, the indenter will penetrate a certain depth into the material. The depth of indenter penetration can be measured microscopically by the area of indentation. Naturally, the depth of penetration and indentation area will be significantly larger in softer materials. Light Water Reactor Materials © Donald Olander and Arthur Motta 2/15/2016 9 As the indenter penetrates the material, plastic flow takes place under the indenter. The stress required for such flow to occur is the flow stress (defined above as the stress required to sustain deformation at a given strain). The presence of the elastic region nearby the indent causes a constraint on the deformation with the result that a much larger pressure than the yield stress is needed to cause plastic flow. For a spherical indenter the relationship between the two is [2]. p 4P d2 (2.5 to 3.0) y (11.22) where p is the pressure on the indenter, P is the applied load, d is the (fixed) diameter of eth indentation. Thus y can be estimated from the test above. Several types of hardness testing exist, depending on indenter shape and whether indent area or depth is measured. Typical examples includeBrinell, Meyer, Vickers and Rockwell. It is also possible to perform this test in a microscale, for example by applying an indenter that is smaller than the dimensions of one grain. 11.2.5. Impact Testing Another type of test that is of great relevance to the nuclear industry is the Charpy Impact test. Impact tests can be used to measure the fracture resistance of the material and can be at least qualitatively related to the toughness of the material. The Charpy test has been widely used in the nuclear industry for assessing the degree of embrittlement suffered by the pressure vessel after exposure to neutron irradiation. In the Charpy test a large hammer swung from a pendulum is released from an initial height h1 towards a specimen in which a v-notch groove has been fabricated (Figure 11.5). The high speed of the hammer and the presence of the notch cause the material to be deformed at a high strain rate and in a triaxial state of stress, both of which favor fracture. The kinetic energy of the hammer is sufficient to break the sample. Subsequent to specimen fracture the hammer continues along its arc, rising to a height h2, lower than h1. The energy absorbed by the specimen during fracture is given by Eabs mg (h1 h2 ) (11.23) where m is the mass of the hammer is g is the gravitational constant. A sample made from a brittle material (such as glass) absorbs little energy as it breaks, while a ductile sample absorbs more energy before fracturing. The test is repeated at several temperatures. For most materials the energy absorbed shows an abrupt decrease at a certain temperature such that a ductile-to-brittle transition temperature (DBTT) can be defined. Light Water Reactor Materials © Donald Olander and Arthur Motta 2/15/2016 10 h2 Figure 11.5. Schematic geometry of a Charpy v-notch Impact test. This is illustrated in Figure 11.6, which shows schematically the energy absorbed during Charpy Impact testing for a steel as a function of testing temperature (in an actual Charpy test the specimen would be positioned horizontally, shown vertically for clarity). The absorbed energy is relatively high at elevated temperature, undergoes a decrease in a relatively narrow temperature regime as the temperature is decreased, then stays at a lower level thereafter. The energies absorbed during fracture at high and low temperature are called the upper-shelf energy and lower-shelf energy, respectively. The midpoint of the transition from the upper shelf to the lower shelf energy is the ductile- to-brittle transition temperature, defined specifically in the case of pressure vessel steels to be the temperature at which the energy absorbed is 41 J. Analyses of the fracture surfaces from testing at low temperature and at high temperature reveals differences in fracture behavior: at low temperature the fracture surface is flat and shiny, indicating brittle failure by cleavage, while at high temperature the fracture surface is dull indicating ductile fracture. The degree of ductile failure can be evaluated by the fraction of the cross-sectional area that shows ductile behavior. Especially for low-tomoderate strength steels the Charpy test is a good indicator of the material toughness, as the fracture toughness often exhibits the same behavior as the Charpy energy, and therefore this is a useful test for assessing material ductility [2]. Light Water Reactor Materials © Donald Olander and Arthur Motta 2/15/2016 11 Eabs (J) upper-shelf energy Brittle 41 J Ductile lower-shelf energy (DBTT) Testing temperature Figure 11.6 Schematic representation of energy absorbed during Charpy test as a function of testing temperature 11.3 Microstructural Aspects of Deformation 11.3.1. Critical Resolved Shear Stress and the Yield Stress As discussed in Chapter 7, plastic deformation in real crystals is effected by the movement of dislocations. As discussed in section 7.3 a slip system is activated when the Schmid factor for this system causes the resolved shear stress to be bigger than the critical value for slip. For a single crystal this predicts the onset of slip and thus the yield point. However, real materials are polycrystalline and contain grains of different orientations, more or less favorably oriented to the loading direction for slip to occur. As a result, some grains will deform more than others at different stages of the deformation process so that the apparently homogeneous repartition of strain actually results from grain-tograin inhomogeneous deformation. Because the deformation of a given crystallite (grain) is actually constrained by other neighboring grains, grain-to-grain incompatibilities arise during deformation which need to be accommodated by further plastic deformation. A simple illustration of such a process is shown in two dimensions in Figure 11.10. Consider two neighboring grains, which are oriented differently to the loading axis such that their shear deformation occurs in different directions. Light Water Reactor Materials © Donald Olander and Arthur Motta 2/15/2016 12 Figure 11.10. Schematic of role of various slip systems in ensuring deformation compatibility In such a situation, if the grains were free, the slip system operational on the left-hand side grain deforms the grain to the left, while the opposite happens on the grain on the right. To maintain the grain boundary together, it is clear that another slip system needs to be operational such that the deformation can be compensated in the other direction, thus keeping the grain boundary together. Thus, two slip systems are needed to maintain compatibility of deformation. In the case of a three-dimensional solid, the process above repeats itself in three different orthogonal directions, which means six independent slip systems need to be operational so that grain-to-grain compatibility of deformation can be achieved. However, the imposition of constant volume means one of those slip systems is not independent and the result is the conclusion that five slip systems are needed to induce deformation in a polycrystalline aggregate. To put it another way, we can assume that each grain deforms in the same way as the overall sample (i.e. it follows the same constitutive law). The strain tensor is written 11 12 21 22 31 32 13 23 33 (11.24) But from symmetry the off-diagonal terms are equal (ij=ji) and so there are six independent variables, and with the assumption that volume is conserved, then five independent variables remain. This means again that five independent slip systems need to be active in a given crystal in order for plastic deformation to occur. Light Water Reactor Materials © Donald Olander and Arthur Motta 2/15/2016 13 For a given load direction, the resolved shear stressRSS acting on a particular slip direction inclined by with respect to the loading axis and contained in a plane inclined by from the loading axis is F cos cos RSS (11.25) A where F is the applied force and A the cross sectional area. When this stress is enough to cause the slip system under consideration to be operative, this is equal to the critical resolved shear stress. The factor cos cos is the Schmid factor for the slip system in question. Thus the yield stress in a polycrystalline material is related to the fifth largest Schmid factor for the active slip systems in the material. Because the fifth highest Schmid factor is much lower than the first, the necessary stress for plastic deformation is much higher than the critical resolved shear stress for a single crystal. This means that the yield stress for a polycrystal is larger than that of a single crystal by the Taylor factor m y m CRSS (11.26) where m is approximately equal to the fifth largest Schmid factor in the sample. Because several grains are involved in ensuring deformation compatibility, the average Taylor factor m is used to describe yield in polycrystalline materials. The exact value of m depends on many factors, including the availability of slip systems, the ease of switching from one slip system to another, the texture of the material and the avialbility of other deformation mechanisms such as twinning. simulations conducted in both fcc and bcc materials show that the Taylor factor is 3.o-3.1 [4]. As mentioned above, although cubic materials normally can have five independent active slip systems, due to the paucity of slip systems, this is not true for hcp crystals, and plastic deformation may be achieved with the help of twinning (see chapter 17). 11.3.2. Dislocations as cause of work hardening Once the material starts to yield, dislocation tangling will end up generating more dislocations by processes analogous to the Frank-Read sources described in Chapter 7. A large fraction of the mobile dislocations are entangled and become sessile. These create a long-range internal stress field which hinders the motion of the mobile dislocations. This causes the stress required for further deformation to increase, according to equation 7.36. This is one the principal causes of work hardening discussed in section 11.2 above. 11.3.3. Yield Strength Increase Mechanisms Several mechanisms exist for increasing the yield strength of a material and all of those involve hindering dislocation motion by either creating obstacles that force dislocations to bend around them or cut through them, both of which require additional energy, or by altering the dislocation itself such that its motion is impeded. Light Water Reactor Materials © Donald Olander and Arthur Motta 2/15/2016 14 As shown in equation 7.36, the critical stress to induce motion of dislocations through a field of hard obstacles by a dislocations looping process is the Orowan Stress 2Gb (11.27) l where G is the shear modulus, b the burgers vector, and l is the spacing between theobstacles. Equation (11.27) is valid for a uniformly distributed array of obstacles. For a random array of hard obstacles, the correct value has been shown [5] to be c c 2Gb l (11.28) where is a constant between 0.8 and 0.9. Any mechanism that creates obstacles that impede dislocations motion will increase in the stress necessary for dislocation motion and thus increase the yield stress. In the same fashion as work hardening, cold working increases the density of dislocations the majority of which are entangled and sessile and their stress field hinders the motion of mobile dislocations . . A similar effect is caused by grain refinement. As the grain size becomes smaller, the distance between grain boundaries decreases, and since these also impede dislocation motion, the stress required for deformation correspondingly increases. Alloy hardening is also possible by the addition of foreign solute atoms, either in solid solution or as precipitate particles. In both cases the mechanism is related to slowing down dislocation motion. In the case of solid solution hardening , dislocations are attached to impurities present in the bulk of the crystal. If the impurity atom size is substantially different from that of the matrix atoms, the strain energy interaction between the solute atom and the dislocation will cause the dislocations to be semi“anchored” by the solute atoms. In the case of precipitation hardening, the added elements come out of solid solution for example during “aging” and heat treatment, and become obstacles to dislocations glide. At small aging times the dislocations have to cut through small precipitate particles (often harder than the matrix). At large aging times, the dislocations bend around large particles in the manner shown in the derivation of the Frank-Read stress.In the latter case, hardening is approximated by equation (11.28) so that a llarge density of small particles with small spacing results in high strength. In either case glide is only possible at higher stresses. A review of strengthening mechanisms is available in other references [4, 5]. 11.4. Creep Deformation The materials tests described in the previous sections aim at determining the instantaneous material response, that is, when the structure of the material does not appreciably change during the test, as is the case at low homologous temperatures (T<0.3Tm) where Tm is the melting temperature . It is possible to observe time-dependent Light Water Reactor Materials © Donald Olander and Arthur Motta 2/15/2016 15 deformation if the load is applied over a long period of time, especially above 0.3 Tm. One simple example is to think of the deformation of a spring. If it is deformed under load in the elastic regime (<y) and quickly unloaded, it returns to its original shape. However if, instead, the loading is applied over a long period (e.g. many months), it is possible that the strain will not be recovered, i.e. there will be plastic deformation. This slow (time-dependent) plastic deformation at a stress lower than the yield stress is called creep. Whether creep or yielding is the limiting factor in engineering design depends on the temperature and on the stress. It is possible to generalize plastic deformation in a material by considering under which conditions of stress and temperature each deformation mechanisms is observed. This has been done graphically by Ashby and Frost [6]. At high enough stress, the theoretical shear strength of the material is reached and the materials fractures, without the intervention of lattice defects. This theoretical shear strength decreases slightly with temperature as the material becomes softer. However, as mentioned in Chapter 7, this theoretical shear strength is seldom reached in reality as dislocations can mediate plastic deformation effectively, at much lower stresses (on the order of 10-3 to 10-4 G). When the applied stress is smaller than that required for dislocation motion, slow strain rate deformation is possible by various creep mechanisms dfescribed in this section. 11.4.1. Phenomenological Description of Creep Creep of a material subjected to a constant load is often observed to be divided into three stages I II III t Figure 11.7: Schematic description of creep strain versus time. Figure 11.7 shows schematically the creep strain as a function of time [7]. In Stage I the initially high strain rate decreases with further deformation. This is likely due to processes akin to strain hardening in which the creep deformation causes the material structure to change such that the strain rate is reduced. When the twin processes of thermally induced deformation recovery and deformation induced hardening match, the material reaches Stage II, or secondary creep, which is characterized by a constant strain Light Water Reactor Materials © Donald Olander and Arthur Motta 2/15/2016 16 rate. This stage may last the greater part of the material lifetime. Finally, Stage III or tertiary creep causes the strain rate to increase and leads to material failure. The life of the material under creep deformation is usually dominated by steady state creep, which is sensitive to both stess and temperature. As a result, the creep strain rate under steady state creep SS is often described empirically by a power law equation of the form SS A e k Q k BT (11.29) where A and k are material constants, is the applied stress and Q is the activation energy for the relevant creep process. The constants A and k are sensitive to the deformation mechanism and may change with stress and or temperature if eth mechanism changes. Thus, an engineering challenge is to predict low stress/ low temperature creep life based on short time tests performed under high stress and high temperature. Larson-Miller Plots Assuming the dominance of steady state creep, Larson-Miller plots are a convenient method of predicting and comparing the creep strengths of engineering alloys. Taking the logarithm of both sides in equation (11.29) we obtain ln Q f ( ) k BT (11.30) where f ( ) ln( A k ) . If a linear relationship exists between and the time to failure tf (such as exists in secondary creep) then B tf (11.31) where B is a constant and f ( ) ln B Q ln t f C tf kBT (11.32) where C is a constant From equation (11.32) we define the Larson-Miller parameter LM. Q LM T [ln t f C ] kB Light Water Reactor Materials © Donald Olander and Arthur Motta 2/15/2016 (11.33) 17 Here Q/kB is a material constant, and the terms on the left hand side of the equation are the parameters of the creep test. The LM parameter is a good indicator of a material’s creep resistance. Different materials show different LM plots. Figure 11.8 shows a LM plot for various candidate materials for advanced reactors [8, 9]. Figure 11.8: Larson-Miller plots for various ferritic-martensitic steels considered for advanced reactors.[9] Example: Use the LM plot to determine the maximum allowable stress for HT-9, when operated at a temperature of 700 K, so that failure does not occur before 104 h. The LM parameter under these conditions is LM=700(ln(104)+30)x10-3=27.8 so that the maximum stress allowed would be about 150 MPa. 11.4.2 Creep Mechanisms During creep, plastic deformation which was not possible during instantaneous loading is made possible by thermally activated processes that allow permanent deformation to occur over a period of time. Creep occurs by several mechanisms and because it depends Light Water Reactor Materials © Donald Olander and Arthur Motta 18 2/15/2016 on thermally activated processes –normally dislocation climb and glide or other thermally activated dislocations motion process or diffusional flow of atoms -, creep is more prevalent at higher temperatures. These mechanisms normally involve the thermally assisted motion of dislocations or a flux of point defects as briefly reviewed here. Thermally enhanced glide Computer simulations have shown that a dislocation in a crystal is constantly “vibrating” around a lattice position. If the critical shear stress for the dislocation is almost reached, thermal energy can provide the additional amount that would get the dislocations “over the hump” and allow it to glide. Thermally induced dislocation glide (Climb and glide mechanism) If a dislocation is stopped by an obstacle in the microstructure which exerts a force on it greater than the force from the applied stress, it is possible for glide to continue if the dislocation can absorb a net flow of point defects so that it can “climb” to another plane where the force exerted by the obstacle is less and glide is possible. This is then normally controlled by the diffusion of point defects to the dislocations allowing it to climb. Stress Induced Diffusional Flow Difference (Nabarro-Herring Creep): When a stress is applied to a solid, the equilibrium concentration of point defects is altered (see Chapter 4), such that, relative to the unstressed value, the vacancy concentration is higher in the presence of a tensile stress and lower in the presence of a compressive stress. This causes the vacancy concentration to be higher in the tensile regions than in the compressive region . Therefore a flux of atoms occurs to the grain boundary under tension and preferential grain growth occurs causing a deformation in the direction of the applied load. Coble Creep: In the same manner as in Nabarro-Herring creep, Coble creep occurs because of a vacancy gradient induced by the sample loading. However in this case mass transport is achieved through the grain boundaries of the material. This causes also an overall grain extension and deformation in the direction of loading. Thermally Induced Grain Boundary Sliding At high temperatures, grain boundaries inclined to the stress can slide providing that vacancies can diffuse and move material to accommodate grain to grain incompatibilities that would otherwise occur. The process obeys equation (11.29), where the constant A increases with decreasing grain size. Deformation Mechanism Maps The regions of applicability of these various deformation mechanisms can be made visually explicit in regions of applicability in a single map. This has been done by Ashby and co-workers [10] for various materials. One example is shown in Figure 11.9. The region at > y, deformation occurs by general yielding and at even higher stresses we Light Water Reactor Materials © Donald Olander and Arthur Motta 2/15/2016 19 reach the ideal strength of the material. At < y plasticity can occur by several creep mechanisms, activated at different temperatures. 1.E+00 Theoretical Shear Strength Normalized Shear Stress 1.E-01 Dislocation Glide 1.E-02 Dislocation Core diffusion 1.E-03 Power Law (dislocation Climb and Glide) creep Lattice Diffusion 1.E-04 1.E-05 1.E-06 Diffusional Creep by Bulk Diffusion (NabarroHerring Creep) Diffusional Creep by Grain Bondary Diffusion (Coble Creep) 1.E-07 1.E-08 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 T/Tm Figure 11.9: Schematic deformation mechanism map based on pure nickel with a grain size of 1 m [10] where grain boundary sliding is insignificant. Other creep mechanisms are operational under irradiation as reviewed in Chapter 27. 11.5. Material Fracture At some point during material deformation the process undergoes a qualitative change which leads the material to fracture, which is discussed in this section. . Fracture can occur as a bulk deformation and rupture or as the result of the propagation of a flaw, such as a crack. In bulk fracture, after the onset of plastic deformation, at some point the material can undergo a loss of load carrying capacity as a result of necking in the gauge section (the ultimate tensile strength illustrated in Figure 11.2). Alternatively, plastic deformation may cause damage in the form of voids causing ductile fracture as a result of an accumulation of damage. Brittle failure can occur either by cleavage, in which a microcrack propagates along favorable crystallographic directions ior by intergranular fracture, normally resulting from grain boundary decohesion because of grain boundary Light Water Reactor Materials © Donald Olander and Arthur Motta 20 2/15/2016 segregation of tramp elements in the alloy or by cracking of particles such as carbides which precipitate at the grain boundary. These mechanisms are reviewed in the following 11.5.1. Ductile Failure by Diffuse Necking: The Considère Criterion As the material starts to deform plastically, the strain is uniform (see Figure 11.2), until the UTS where necking starts to appear. Once a small deviation from uniform strain appears in the gauge section, such as shown in Figure 11.1, a loss of load carrying capacity develops, as additional strain causes the stress in the neck to increase, which causes further deformation and so on. However, as the material deforms, it also work hardens, which raises the flow stress. Thus a criterion can be developed whereby the material becomes unstable when it starts to deform faster than it can strain harden [11]. This is called the Considère criterion, as derived below. The first thing to note is that diffuse necking initiates at close to maximum load and thus P .A dP Ad dA (11.34) dA d d d A d (11.35) and so Consider further that when a rod such as in Figure 11.1, subjected to a load P, initial length l and initial cross sectional area A, the material is deformed plastically to a length l+dl which results in a diminution of area to A’. This causes the material to strain harden. If the material deforms according to equation (11.8), K n The strain hardening caused by an incremental strain d is d n Kn n 1 d (11.36) (11.37) At the same time the area is reduced by an amount given by conservation of volume A.l A '(l dl ) (11.38) dA dl d A l (11.39) This implies that So from equations (11.37) and (11.35) Error! Reference source not found., we obtain a criterion for the development of a diffuse necking plastic instability Light Water Reactor Materials © Donald Olander and Arthur Motta 2/15/2016 21 U n (11.40) where U is the uniform true strain at the onset of necking. This equation, the Considère criterion[12], states that at the onset of a necking instability the strain is equal to the strain-hardening exponent n. 11.5.2. Ductile Fracture Once necking occurs, the actual fracture of, the material normally occurs by a process of damage accumulation. Due to the presence of hard second phase particles or inclusions (such as intermetallic precipitates, carbides, sulfides or hydrides), deformation incompatibilities develop within the material as it plastically deforms so that ductile intergranular fracture is rare. At small plastic strains these deformation incompatibilities are accounted for by other slip systems that allow particle-to-matrix interfaces to remain whole as shown schematically in Figure 11.10. Light Water Reactor Materials © Donald Olander and Arthur Motta 2/15/2016 22 (a) (b) (c) (d) Figure 11.11 Schematic representation of void formation and coalescence in ductile failure in a unixal tensile test. As a result of dislocation pileups and interactions, or because enough damage has accumulated nearby the second phase particles and interfaces, this process of deformation accommodation may start to break down. This causes damage in the form of voids to nucleate at particle-matrix interfaces. It is also possible that the second phase particle itself may crack. In any case, the result is the formation of voids in the highly strained areas as illustrated in Fig.11.11. Upon further straining of the material such voids grow and eventually coalesce. To correctly predict failure in this case it is necessary then to have a void initiation relationship that identifies the strain to initiate voids as well as a void growth law and a void coalescence condition. Many such models have been developed [13] but are beyond the scope of this book . As a result of the formation of voids before fracture (b) and their coalescence (c), the fracture surface will normally exhibit ductile dimples corresponding to microvoid coalescence, as shown in Fig.11.12 picture of dimples Fig.11.12 Light Water Reactor Materials © Donald Olander and Arthur Motta 2/15/2016 23 11.5.3. Fracture due to Crack Growth Brittle fracture occurs without significant overall plasticity of the material. This can occur by the formation of a crack and its propagation. The presence of a crack or a flaw in a material can severely affect its strength and fracture. The problem then is to calculate what controls crack propagation, and this is covered in the following section. Griffith Fracture Theory Figure 11.12 shows the process of formation of a crack of unit length in a solid under load. If a section of this material is cut, introducing a crack of depth c, a certain amount of elastic energy is released. This represents a driving force for crack propagation, since elastic energy stored is thus released. In counterbalance to this driving force, the propagation of a crack, (thus causing the material to fracture) requires the formation of two surfaces. The energy required to form these new surfaces is a large contributor to the fracture energy. As a result, the condition for unstable crack propagation can be derived from a comparison of energy for new surface creation with the elastic energy released upon crack advance. This was the theory derived by Griffith in 1921. However, except in very brittle materials, this theory tends to underpredict the work required to advance a crack. This is because in materials which exhibit some ductility it is necessary to induce some plastic deformation prior to fracture. This occurs in a region ahead of the crack called the plastic zone. The Griffith theory of fracture with a correction for the plastic zone is derived in the following. Consider a solid under load in which a crack is introduced, as shown in Figure 11.12. As mentioned above this will release elastic energy and create surface energy. Light Water Reactor Materials © Donald Olander and Arthur Motta 2/15/2016 24 plastic zone c Figure 11.12 A crack advancing in a solid under load The energy per unit crack extension to createtwo new surfaces and a plastic zone ahead of a crack of depth c is given by Esurf (2 surf plastic ) c * c (11.41) where surf is the surface energy per unit area to create two new surfaces by bond rupture and plastic is the plastic strain energy per unit area associated with the plastic deformation that accompanies crack growth, integrated over the length c. The elastic strain energy released per unit volume is Eel E 2 2 2 2E (11.42) We assume all elastic energy is contained in a half-cylinder whose cross section is the semi-circle radius c around the crack. The total elastic energy released by the creation of the crack length c is then: c2 2 Eel 2 2E Light Water Reactor Materials © Donald Olander and Arthur Motta 2/15/2016 (11.43) 25 The presence of the crack relieves the strain energy in the shaded region. Thus a solid with initial elastic energy E elo would have Eel E o el 2c 2 (11.44) 4E and Etot Esurf Eel Etot *c (11.45) 2c 2 (11.46) 4E To find the condition for crack propagation we set the derivative of the energy relative to crack size equal to zero and rearrange dEtot 0 dc (11.47) dEtot 2c * 2 0 dc 4E (11.48) 2 E * c ( c )crit 2 E * K IC (11.49) The right hand side of equation (11.49) contains mostly material properties (the size of the plastic zone in * is also a function of the stress intensity). The level of this parameter that causes failure under a specific set of conditions (plane-strain deformation in mode I) is called the fracture toughness of the material KIC. In actual tests, a geometric correction is needed to take into account the increased stress intensity in the vicinity of a crack. (11.50) KIC Y c where Y is a constant between 1 and 2, depending on the geometry of the crack. [7] Various closed forms of Y for many different geometries are available [7]. If the maximum allowable flaw is substituted into equation Error! Reference source not found., then the critical stress intensity factor is obtained when the design stress is obtained. Equations (11.49) and (11.50) indicate that the higher the elastic modulus, the surface energies and the larger the plastic zone, the higher the fracture toughness. . Light Water Reactor Materials © Donald Olander and Arthur Motta 2/15/2016 26 In an inert environment with KI KIC , cracks are indefinitely stable if creep and/or fatigue are not a factor. In an aggressive environment, (Chapter 25) failure can occur by slow crack growth, i.e. if K IC K I K ISCC (11.51) KIC (critical stress intensity or fracture toughness) is measured in laboratory with carefully prepared cracks in fracture toughness specimens. Light Water Reactor Materials © Donald Olander and Arthur Motta 2/15/2016 27 Problems 11.1 A metal rod of initial length l0 and cross sectional area A0 is tested uniaxially by fixing one end of the rod to a stationary point and loading the other with a spring of force constant K. The change in length of the rod, l-l0, is related to the change in length of the spring, x, by: x = xY - a(l-l0)2 + b(l-l0) where the first term on the right is the spring extension at the yield point of the rod and a and b are empirical constants. (a) Express the true stress x in terms of the true (logarithmic) strain x and the parameters K, A0, l0, a, b, and xY. Do not assume a functional relation between these two variables(e.g., Eq(7.3)). Neglect elastic strain. (b) Use the criterion for plastic instability to determine the true strain at the UTS. 11.2 The true stress-true strain curve in the work-hardening region can be written in dimensionless form: Y n A Y Y where the subscript Y denotes the yield point, A is a dimensionless constant, and n is the work-hardening coefficient. Define X = (UTS - Y)/Y, where UTS denotes the ultimate tensile stress. (a) What is the equation relating X to A and n? (b) solve this equation for A = 23 and n = 0.7. (c) show that X increases with n at constant A 11.3 For a particular metal, the true stress and the true strain obey the following plastic constitutive law: x = Y exp(x - Y). Prove that this material has no work-hardening region. Light Water Reactor Materials © Donald Olander and Arthur Motta 2/15/2016 28 11.4 A closed cylindrical tube is pressurized to exceed yielding by 20%. The constitutive equation for the material of the tube in the plastic region is: x - Y = Cxn (elastic strain at the yield point is negligible). (a) What are the stresses in the tube wall in terms of the uniaxial yield stress of the material? (b) The plastic “strength” of the material is defined by: S = (* - Y)/*, where * and * are the equivalent stress and strain, respectively. Determine S. (c) What are the radial, azimuthal, and axial plastic strain components in the tube wall? 11.5 A spherical shell of radius R and wall thickness is pressurized internally to a pressure p. (a) What stress components are nonzero and what are their values(use a force balance as in Sect. 5 for the pressurized cylinder) (b) If the uniaxial yield stress is Y, at what internal pressure will the shell yield? 11.6 The creep law of a particular steel is found in uniaxial tests to obey: 161 6.4 exp(3 104 / T ) where the strain rate is in hr-1, the stress is in MPa, and the temperature in Kelvin. A component fabricated from this steel operates at 330oC. The principal normal stress components at a particular location are x = 380 MPa, y = 220 MPa and z = 180 MPa. How long is required for the creep strain (in any direction) to reach 2%? 11.7 A weight of mass m is suspended from a closed thin-wall tube of radius R and wall thickness with internal pressure p. The yield strength of the tube material is Y. Allowing for a 25% safety factor, what is the maximum gas pressure in the tube? Light Water Reactor Materials © Donald Olander and Arthur Motta 2/15/2016 29 11.8 A tensile test specimen is initially of length l0 and cross sectional area A0. The specimen is subjected to varying loads P and the deformation l measured at each. The data are correlated by the empirical equation: P = c + bl - a(l)2 where a, b and c are positive constants. (a) What are the “engineering” yield and ultimate stresses of this material? (b) Show how the true stress-true strain curve can be deduced from the above equation. Neglect elastic deformations and assume all deformation to be plastic. 7.9 When tested uniaxially at a particular temperature, the creep rupture behavior of a 1/ m batch of metal tubing obeys the equation: x C t R , where C and m are material properties. This equation is Eq (7.7) of the notes with the temperature dependence included in the constant. (a) When this tubing is sealed at both ends and pressurized at constant pressure p, what is the rupture time? The tube diameter is D and its wall thickness is . (b) If the internal pressure varies linearly with time(p=kt), what is the time to failure? 11.10 A rod just fits between two rigid plates when its temperature is To. The rod is heated quickly and uniformly to a temperature T but the restraining plates do not move. heated rod Rigid plates (a) What is the initial axial stress in the rod when the temperature reaches T? Hint: Eq (5.14c) can be viewed as the total strain equal to the sum of the elastic and thermal strains, or tot = el + th. (b) With time, the stress computed in part (a) is reduced because of creep (this is called creep relaxation). Since the thermal strain does not change with time, the total strain rate is the sum of the time rate of change of the elastic strain plus the creep strain n rate, or tot el cr . At the final temperature T, the creep rate is cr B , where the constant B includes the temperature effect. Derive the equation giving the variation of the axial stress in the rod with time. Hint: in both parts (a) and (b) keep in mind that the total length of the rod remains constant. Light Water Reactor Materials © Donald Olander and Arthur Motta 2/15/2016 30 References [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] N. E. Dowling, Mechanical Behavior of Materials: engineering methods for deformation, fracture, and fatigue: Prentice Hall, 1999. T. H. Courtney, Mechanical Behavior of Materials. New York: McGraw-Hill, 1990. W. A. Backofen, Deformation Processing. Reading, MA: Addison-Wesley Publishing Co., 1972. A. S. Argon, Strenghtening Mechanisms in Crystal Plasticity: Oxfor University Press, 2008. L. M. Brown and R. K. Ham, "Dislocation-Particle Interactions," in Streng\htening Methods in Crystals, A. K. a. R. B. Nicholson, Ed. London: Applied Science Publishers Ltd., 1971. H. J. Frost and M. F. Ashby, Deformation-Mechanism Maps, The Plasticity and Creep of Metals and Ceramics, 1982. R. Hertzberg, Deformation and Fracture Mechanics of Engineering Materials, 3rd ed.: Wiley, 1989. R. L. Klueh and D. R. Harries, High Chromium Ferritic and Martensitic Steels for Nuclear Applications. West Conshohocken, PA: ASTM, 2001. R. L. Klueh and A. T. Nelson, "Ferritic/martensitic steels for next-generation reactors," Journal of Nuclear Materials 371 (2007) 37–52. M. F. Ashby, Acta Metallurgica 20 (1972) 887. W. Soboyejo, Mechanical Properties of Engineered Materials. New York: Marcel Dekker, Inc., 2003. A. Considere, Ann. Ponts et Chaussees 9 (1885) 574-775. A. Gurson, "Continuum theory of ductile rupture by void nucleation and growth : Part I – Yield criteria and flow rules for porous ductile media. ," Journal of Engineering Materials and Technology 99 (1977) 2–15. Light Water Reactor Materials © Donald Olander and Arthur Motta 2/15/2016 31