Report 2
advertisement

Introduction
At 10:55 A.M. on November 7, 1940, the first section of the Tacoma Narrows Bridge
disappeared into the depths of the Puget Sound. Only 15 minutes later, the roadway collapsed
between the bridge’s two main towers (Hobbs, 2006). While many regard the demise of the
Tacoma Narrows Bridge as one of the most famous engineering disasters of the 20th century, few
realize that the conception of the bridge’s fatal flaw took place when the original blueprints for
construction were redesigned due to cost. Since the collapse, there have been several reports,
papers, and other scholarly writings scrutinizing the final engineering blueprints along with
video footage of the collapse in an attempt to define an accurate mathematical model
surrounding the bridge’s failure (Menkveld & Pence, 2001). These models range from a simple
oscillation model to dynamical system’s model of non-linear, second order differential equations.
For the purpose of this paper, we will examine both a linear and a nonlinear model with an
extended focus on the model of the torsional motion of the bridge.
History of the Problem
Constructing a bridge over the Puget Sound to connect Tacoma with the Olympic
Peninsula was originally suggested in 1927. However, this proposal, along with many others,
was rejected for financial reasons. The financial concerns ranged from the cost of construction to
the inability of the bridge to pay for itself over time. Funding for the bridge finally seemed
possible with the introduction of Roosevelt’s New Deal. In January of 1937, the Washington
State Legislature passed a law creating the Washington Toll Bridge Authority (WTBA) and
appropriated $25,000 to study the request for a bridge. The appropriations for the study became
necessary, as there was a new urgency to build a bridge over Puget Sound. This construction was
seen as a military necessity to build a connection between the Puget Sound Naval Shipyard and
the McChord Air Field.
The initial application for funds included a design by Clark Eldridge, a state bridge
engineer. Eldridge’s construction plans came with an estimated cost of $11 million to build the
bridge. The Public Works Administration (PWA) only agreed to grant 45% of the construction
costs. Unfortunately, this amount was much less than the state had expected, thus requiring the
WTBA to hire engineers selected by the PWA. The new engineer was Leon Moisseiff, and he
told the PWA that his changes would cut costs to under $7 million. When Moisseiff’s plans
reached the state engineers, they immediately protested saying the design made the bridge
proportionately lighter and narrower than any other bridge in the world. While their concerns
were not made public, the WTBA’s Board of Consulting Engineers agreed that Moisseiff’s
design for the bridge was not acceptable. A compromise was reached when the WTBA proposed
substituting Eldridge’s original design for the piers, while keeping Moisseiff’s superstructure.
Construction began November 23, 1938, and the bridge opened on July 1, 1940.
Onlookers marveled “at the gossamer grace of a bridge so long” (Hobbs, 2006, p. 15). The
bridge’s dimensions were remarkable, for the bridge was 5,939 feet long with 2,800 feet between
the towers, yet only 39 feet wide. It was the third longest suspension bridge in the world after the
Golden Gate Bridge and the George Washington Bridge, and it was by far the slimmest.
The overall economic impact of the construction of the bridge was much greater than
expected. Despite this good news, there were growing concerns regarding the structure of the
L. Lowe, L. Singletary 2
bridge. The bridge began showing vertical waves just months before the bridge’s opening day.
Attempts to calm the bridge’s movement were tried before opening day, but none worked. The
bridge moved in a light breeze, for small winds of three miles per hour could cause movement.
Waves of two to five feet would roll from one end of the bridge’s center span to the other.
However, there seemed to be no correlation to wind speed and the movement of the bridge. The
bridge’s movements caused thrill seekers to travel hundreds of miles just to drive on the bridge
when it was bouncing. A few drivers reported waves of 10 feet high. The bridge quickly earned
the nickname of “Galloping Gertie”, and as time progressed the bridge’s structure seemed
doomed to fail.
On the morning of November 7, 1940, the wind speed reached 42mph, causing the bridge
to oscillate between 2 to 4 feet. At 10:03AM, a lateral twisting motion in the center span began.
Within a few minutes, the roadway began tilting as much as 28ft (35degrees). The bridge was
immediately closed. Around 10:30 A.M., pieces of concrete had already begun to break off. By
this point, the bridge had twisted 14 times per minute. After a brief lull in motion, it sped up to
20 twists per minute. At 10:55AM more concrete fell from the center span. By 11:10, the center
span of the bridge was gone.
The State of Washington, insurance companies, and the WPA immediately appointed
independent panels to investigate the collapse. The report submitted to the Federal Works
Administration (FWA) four months later stated that the “’random action of turbulent wind’
caused the bridge to fail” (Hobbs, 2006, p. 80). The engineering panel found that the bridge’s
flexibility was also to blame. They found that the likely cause of the torsional motion was cable
bands slipping on the north cable in the middle of the span, separating the north cable into
different lengths. This was the first time engineers became aware of the effect of wind on
bridges. The failure of the Tacoma Narrows Bridge changed bridge engineering theory, and
ended an era of flexible, lightweight, narrow suspension bridges.
Problem Statement
In order to understand some of the engineering aspects that led to the collapse of the
Tacoma Narrows Bridge, we will evaluate the mathematics surrounding the movement of the
bridge. The models developed within this paper take into account both the vertical movements
and the torsional motion of the bridge. Our model will require the use of a cross section of the
bridge, where the analysis will require considering the bridge’s cables to act as springs and the
cross section of the bridge as a long, thin rod.
Analysis of the Energy:
To begin our exploration, it is important to consider the effects of both the kinetic and
potential energy inherent in the structure of the Tacoma Narrows Bridge. We must consider the
translational kinetic energy from the vertical motion of the rods, where m represents the mass of
the rods and v is the velocity of the moving rods:
KET 12 mv 2
(1)
Not only is there kinetic energy due to the vertical motion of the rods, there is also rotational
kinetic energy as the rods are able to rotate freely about their center.
L. Lowe, L. Singletary 3
KEr 12 I 2
(2)
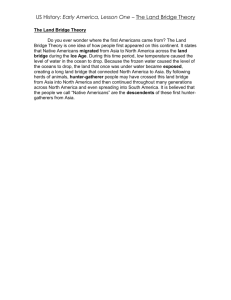
Figure 1. Cross-section of the bridge
Rotational kinetic energy relies on a quantity known as the moment of inertia, which is labeled
with the symbol, I, where m is the mass of the object and r is the radius of rotation. The standard
equation for the moment of inertia is seen in the equation 3, and the equation for the moment of
inertia of L, a long, thin rod is shown in equation 4:
I mr 2
I
1
mL2
12
(3)
(4)
Substituting the moment of inertia of a long, thin rod equation (equation 4) into the equation for
rotational kinetic energy (equation 2), we find this simplified equation for the rotational kinetic
energy:
KE r
1
mL2 2
24
(5)
Combining the total kinetic energy for the system requires summing the following quantities:
1.) the translational kinetic energy due to the vertical motion of the bridge’s cross section, 2.) and
the rotational kinetic energyof the rods.
1
1
KETotal mv 2 mL2 2
2
24
Ý, then we can rewrite the equation for total kinetic energy 6 as follows:
Allowing
(6)
L. Lowe, L. Singletary 4
1
1
Ý2
KETotal mv 2 mL2
2
24
(7)
If we allow v yÝ, then the total kinetic energy of this system is:
1
1
Ý2
KETotal myÝ2 mL2
2
24
(8)
y t (y y1 )
(9)
Next, we must develop the potential energy of the rods in two parts: 1.) Potential energy of the
rod due to the effects of gravity, 2.) Potential energy of the rod caused by the rotation of the rod
a kind of “toggle” effect because of the displacement. We can
about its center, thus causing
consider the vertical deflection on both the right and left sides of the rod. The vertical deflection
on the left side is characterized by the given equation:
The vertical deflection on the right side is characterized by the given equation:
y t (y y1 )
(10)
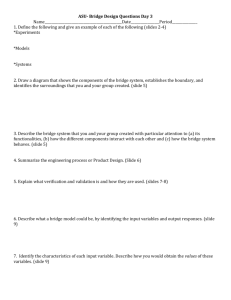
Figure 2: Cross-section showing angle displacement
Equations 9 and 10 can be derived by viewing Figure 2, for the equations are a result of the total
displacement (on each side) is equal to the displacement from the center of gravity of y1 with the
addition of the displacement of y due to the toggle effect. The demonstrates the ways in
which the cables can have similar motion to springs, but only when pulled. Therefore, this
implies that = max {0, x}.
Using Figure 2, we can calculate y1 using right angle trigonometry:
L. Lowe, L. Singletary 5
y1 Lsin
(11)
With equation 11, we can rewrite our equations for yT :
y t (y L sin )
(12)
y t (y L sin )
(13)
Remember, we are evaluating
two different aspects as we calculate our potential energy. First,
we will consider the potential energy due to the effects of gravity, where:
PE gravity mgy
(14)
Next, consider the potential energy stored in the cables of the bridge using the classical physics
equation for the potential energy of a spring, where k is called the spring constant and y is
typically considered the distance
the spring is compressed:
1
PE S ky 2
2
(15)
Combining the potential energy due to gravity (equation 14) with the potential energy of a spring
(equation 15), we have the following equation that represents the total potential energy:
1
PETotal ky 2 mgy
(16)
2
Substituting equations 13 and 14 into the total potential energy equation (equation 16), we have
an equation for total potential energy that accounts for the displacement of y from the toggling
effect:
PETotal
2
2
L
1 L
k y sin y sin mgy
2
2
2
(17)
Recall, the following equation represents the total kinetic energy of this system:
1
1
Ý2
KETotal myÝ2 mL2
2
24
(18)
Applying Lagrangian Mechanics to our Model
Next, we will introduce the
Lagrangian, L, as it is a function that summarizes the dynamics of a
dynamical system. McKenna (1999) used Lagrangian Mechanics to develop a model that took
both vertical and torsional movements into account, since the Lagrangian is a reconstruction of
classical mechanics that unifies the conservation of momentum with conservation of energy.
The Lagrangian of a system is defined by L KE PE , given that:
d L L
Ý
dt
(19)
L. Lowe, L. Singletary 6
d L L
dt yÝ y
(20)
Therefore, by forming the Lagrangian, we have:
2
2
L
1 2 1
1 L
2 Ý2
L mÝ
y mL k y sin y sin mgy
2
2
24
2
2
L
L
L
L
1 L
k2y sin cos 2y sin cos
2
2
2
2 2
L
L
L 1
kLcos y sin y sin
2
2
2
(21)
Then, calculations of the derivative with respect to time of the partial derivative of L with respect
Ýproduce the following:
to
L 1
Ý
Ý
mL2
(22)
Ý
12
t
Using equation 19, we can equate equation 22 to equation 21:
L
L
1 2 Ý
1
Ý
mL kLcos y sin y sin
2
12
2
2
(23)
Returning to the second equation formed by the Lagrangian equations, we can find the derivative
with respect to time of the partial derivative of L over partial derivative of y.
L
L
1 L
k2y sin 2y sin mg
2
y
2 2
L
L
L
ky sin y sin mg
2
y
2
(24)
Next, we will take the derivative with respect to time of the partial derivative of L with respect to
yÝ:
L
1
2 myÝ myÝ
yÝ
2
d
y mÝ
yÝ
mÝ
dt
Using equation 20, we can equate equation 25 to equation 24:
(25)
L. Lowe, L. Singletary 7
L
L
Ý ky sin y sin mg
myÝ
2
2
(26)
Ý
Ý. Similarly, simplify equation 26 by solving
Simplify equation 23 by solving explicitly for
Ý.
explicitly for yÝ
L
L
6k
Ý
Ý
Ý
cos
(27)
y sin y sin f (t)
mL
2
2
L
k L
Ý y sin y sin g yÝ
yÝ
(28)
2
m 2
Assuming the cables never lose tension, we no longer require the following notation that implies
that = max {0, x}, as we know the result is always greater than zero. Therefore we can
rewrite the following equations:
L
L
y sin y sin
2
2
(29)
L
L
y sin y sin
2
2
(30)
Ý
yÝ
2k
y g yÝ
m
(31)
Ý
Ý
6k
Ý
sin cos f t
m
(32)
Thus, vertical and torsional motion can be expressed as follows:
Originally developed by McKenna (1999), equations 31 and 32 are the mathematical models that
will be used to examine the movement of the Tacoma Narrow Bridge. We will place additional
our analysis, as it depicts the torsional motion of the bridge. It is
focus on latter equation during
necessary to understand all of the components of the equation during our evaluation, for it is the
combination of the various parameters that influenced the movement of the bridge. Therefore,
our following model for torsional motion is:
Ý
Ý
6k
Ý
sin cos f t
m
Where,
k = the spring constant
m = mass per foot of the bridge
angle of rotation
L. Lowe, L. Singletary 8
f(t)external forcing term
damping coefficient
t = time
McKenna’s model (equation 32) made an assumption that the external forcing term, f(t), was a
periodic function. We can characterize the external forcing term where is the amplitude of the
forcing term and represents the period of this forcing term.
f (t) sin t
(33)
Before evaluating McKenna’s model for the torsional motion of the bridge with computer
software, we will simplify the model by substituting in the values of the constants. The mass of
the bridge’s center span wasapproximately 2,500 kg/ft. Using Hooke’s Law, we calculate the
spring constant of the cables to be approximately k 980, but for the purposes of simplicity we
will let k 1000. Data collected during the investigation after the bridge’s collapse determined
that the frequency of oscillations was around 12-16 cycles/min. Therefore, we will evaluate for
different values of , letting the values range
. Scanlan and Tomko (1971)
determined the amplitude of the forcing term was for their report stated that the value for was
radians. Lastly, according to the FWA Report, the dampening term was
determined to be 0.01. Therefore, we can rewrite our equations for torsional and vertical
motion as
Ý
Ý 2.4 sin cos sin t 0.01
Ý
(34)
Ý 0.8y 9.8 yÝ
yÝ
(35)
It is possible to linearize theequation (equation 34) for torsional motion. In order to linearize the
equation for torsional motion we must make some approximations. If we let
sin
(36)
cos
1
(37)
We can rewrite the torsional motion equation as:
Ý
Ý 2.4 sin t 0.01
Ý
(38)
In the following portion of our analysis, we will compare the linearized equation with the nonlinearized equation. Therein, we will see the reason for the collapse of the Tacoma Narrows
Bridge on November 7, 1940.
Analysis of the Dynamics Surrounding the Collapse of the Bridge
Realizing our equations had five dimensions; we characterized our equations below in
order to evaluate the system using XPhasePlane. Understanding the XPhasePlane inherently
analyzes the system over time, we only wrote four equations into our computer code:
L. Lowe, L. Singletary 9
Ý
Ý 2.4 sin cos sin t 0.01
yÝ x
xÝ 0.8y 9.8 0.01x
Ý0 00,
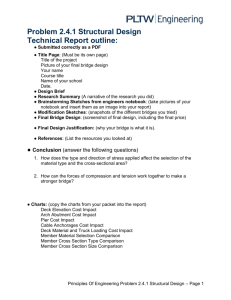
Our first set of computer outputs using the following values: 0 1.2 ,
1.2 , 0.05 (large push). The first diagram uses McKenna’s non-linearized model, while
the second diagram uses thelinearized model. With the y-axis representing rotation in radians
and the x-axis representing time, we can see that the outcome, over time, of the two models is
similar.
Figure 3. The non-linearized model with 1.2 , 0.05
Figure 4. The linearized model with 1.2 , 0.05
L. Lowe, L. Singletary 10
Next, we will compare the non-linearized model with the linearized model when
0 1.2 , Ý0 0, 1.3, 0.05 (large push). Notice, we have used a larger value for the
period of the external forcing term. This is to explore the range of values for 1.2 1.6 for the
frequency of the bridge’s oscillations. It is obvious that with a greater value for the period of the
forcing term, we have an interesting situation in Diagram 5. The non-linearized model indicates
the standard
that
response
of the bridge, under these circumstances, will not allow the rotational
aspects of the bridge to stop. This is evident from the results of the
fateful day in November.
However, we notice that the linearized model in Diagram 6 indicates that the rotation of the
bridge will eventually converge to zero. What is causing the drastic difference between the
outputs in the models? When we made our linearizing approximations, we made them for only
small angles of displacement. Yet, the displacement angles experienced by the bridge were
anything but small. Thus, this gross estimation will not capture the true rotational movement of
the bridge.
Diagram 5. The non-linearized model with 1.3, 0.05
Diagram 6. The linearized model with 1.3, 0.05
L. Lowe, L. Singletary 11
Next, we will consider what might happen if we evaluate with the greatest recorded value
for the period of oscillation. This set of computer outputs using the following values: 0 1.2 ,
Ý0 0, 1.6 , 0.05 (large push). It is interesting to note that with such a large period,
neither model converges to zero.
Diagram 7:The non-linearized model with 1.6 , 0.05
Diagram 8: The linearized model with 1.6 , 0.05
The following diagrams display the difference in the bridge’s rotational behavior when
Diagram 9: 1.24 compared to Diagram 10: 1.25 . While the comparison of the
values for the forcing term’s period is only different
by
a hundredth, the overall outcome of
the bridge’s behavior is drastically different. This powerful influence of initial conditions
can be seen in the final phase portrait as well, for the slightest difference in initial
conditions will effect whether the movement of the bridge converges to zero or continues
to oscillate.
L. Lowe, L. Singletary 12
Diagram 9: The non-linearized model with 1.24 , 0.05
Diagram 10: The non-linearized model with 1.25 , 0.05
The following diagram illustrates the torsional behavior of the bridge over time
without the inclusion of the external forcing term. It is interesting to note that without the
external forcing term for the non-linearized modelthe simulation
indicates that the
bridge’s oscillations will steadily decrease toward zero over time.
L. Lowe, L. Singletary 13
Diagram 11: The unforced trigonometrically correct model with 0 1.2 ,
Lastly, we will examine our model without the external forcing term. Diagram 11 depicts
the simulation of our model without the forcing term with respect to time. This simulation
indicates that the amplitude of the rotation steadily decreases towardzero with similar initial
conditions. Diagram 12 displays the phase portrait of the unforced model. It is readily apparent
that the slightest change in certain values may effect the movement of the bridge. Depending on
the initial conditions, the movement of the bridge might eventually slow to almost nothing or the
movement of the bridge might not end.
Diagram 12: Phase Portrait of Unforced Model ( vs. time)
L. Lowe, L. Singletary 14
Conclusions
This paper developed a model to evaluate vertical and torsional movements of the
Tacoma Narrows Bridge. While there was a specific focus within the paper to evaluate the effect
of the external forcing term on the structure of the bridge, there was also a careful evaluation of
the effect of the period within the forcing term. Further developments and understanding of the
forces that influence the torsional movements can affect future models and engineering designs
of suspension bridges. Further study should also take into account the variable effects of some of
the assumptions made within our paper using McKenna’s model, such as: our assumption that
the cables did not lose tension, and an assumption that the torsion was symmetric and
independent from the vertical motion. Additionally, further study might apply the lessons
learned from the Tacoma Narrows Bridge to similar suspension bridges like the Broughton
Bridge, Angers Bridge, or the Millennium Bridge.
References:
Hobbs, R. S. (2006). Catastrophe to triumph: Bridges of the Tacoma Narrows. Pullman, WA:
Washington State University Press.
McKenna, P. J. (1999). Large torsional oscillations in suspension bridges revisited: Fixing an
old approximation. The American Mathematical Monthly, 106, 1-18.