Edge detection is one of the most important parts of image
advertisement

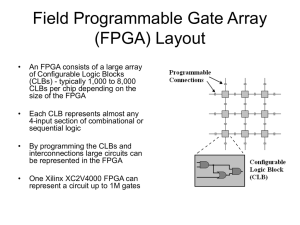
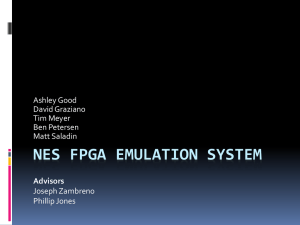
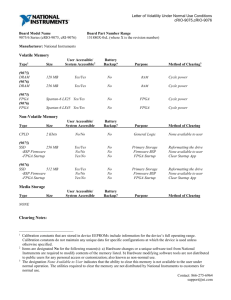
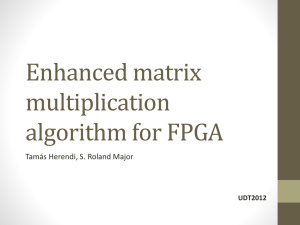
RESEARCH PROPOSAL PERFORMANCE EVALUATION OF EDGE DETECTION IMPLEMENTATIONS ON AN FPGA AND IN SOFTWARE USING HAND MADE EDGED IMAGES Student: Irwan Ramli LMCP (ID 100107648) Supervisor: Dr. Grant Wigley School of Computer and Information Science UNIVERSITY OF SOUTH AUSTRALIA CIS Research Method Page 1 of 30 Abstract Edge detection is one of the most important parts of image processing, analysis, and recognition. It is used to produce something like a line drawing of an image. The process of detecting edge should be done correctly, the exact edge should not be missed, and the non-edge should not be recognized as an edge, and the edge should be located on the right place (He & Zhang 2007). There are three ideas to evaluate the performance of the edge detectors; the comparison method should be done using the real images, the evaluation method should produce results that correlate with the perceived quality of edge images, and the edge detectors should be evaluate within a vision system performing a task (Heath et al. 1997). Since the decision of the correctness is much better decided by human than machines, this motivates this proposed research to compare the result of edged image that produced by two edge detection algorithms; an improved Canny edge detector (He & Zhang 2007) and a new edge detection approach based on image context analysis (Yu & Chang 2006) to the hand edged image that produced by human which are defined in advance in both software and FPGA based. Some methodologies need to be conducted to achieve the objective of this proposed research, such as defining the hand made edged image, studying the algorithms that will be used in the implementation on both software and FPGA based, and evaluating the correctness of the edged image produced by each algorithm. This proposed research is supposed to have a good impact for future work such as images or objects recognition or identification. CIS Research Method Page 2 of 30 Table of contents Abstract .............................................................................................................................................. 2 Table of contents ................................................................................................................................ 3 1. Introduction .................................................................................................................................. 4 1.1 Motivation .............................................................................................................................. 5 1.2 Research Question ................................................................................................................ 7 1.3 Scope and Contribution ......................................................................................................... 7 2. Literature Review ......................................................................................................................... 8 2.1 Performance evaluation of edge detection on software ........................................................ 8 2.2 The implementation of the edge detection algorithm on FPGA ............................................ 9 2.3 The performance comparison between the implementation of edge detection algorithm on FPGA based and software based ................................................................................................ 11 2.4 Advanced implementation of image processing algorithm and reconfigured FPGA ........... 13 3. Methodology .............................................................................................................................. 14 3.1 Hand made edged image .................................................................................................... 14 3.2 Edge detection algorithms ................................................................................................... 15 3.2.1 The introduction of the improved Canny edge detection algorithm ........................... 15 3.2.1.1 Self-adaptive threshold value setting .................................................................. 16 3.2.1.2 The methodology of improved Canny algorithm ................................................. 16 3.2.2 A new edge detection approach based on image context analysis .......................... 18 3.2.2.1 GAP predictor ...................................................................................................... 18 3.2.2.2 The methodology of new approach of edge detection algorithm based on image context analysis ................................................................................................................... 19 3.3 The correctness evaluation of edge position....................................................................... 21 3.4 Expected outcomes ............................................................................................................. 21 3.5 Future work.......................................................................................................................... 22 4. Schedule .................................................................................................................................... 23 5. References ................................................................................................................................. 25 6. Bibliography ............................................................................................................................... 28 CIS Research Method Page 3 of 30 1. Introduction Edge detection is one of the most important parts of image processing, analysis, and recognition. It is used to produce something like a line drawing of an image. The real object that has various colors on its surface can be captured to produce an image, and the result of this could be different depend on the intensity of the light and the angel of the capturing device when the object is being captured. This has a big impact on producing the edge of the image that has been captured, while the process of detecting edge should be done correctly, the exact edge should not be missed, and the non-edge should not be recognized as an edge, and the edge should be located on the right place (He & Zhang 2007). The edge detection algorithm has been developed since more than four decades ago, and they are classified into five categories (Sharifi, Fathy & Mahmoudi 2002). Those are: 1. Gradient or Classical edge detectors, which contains classical operators and uses first directional derivative operation such as Sobel (1970), Prewit (1970), Kirsch (1971), Robinson (1977), Frei-Chen (1977), Deatsch and Fram (1978), Nevatia and Babu (1980), Ikonomopoulus (1982), Davies (1986), Kitchen and Malin (1989), Hancock and Kittler (1990), Woodhall and Linguist (1998), and Young-won and Upda (1999). 2. Zero crossing, which uses second derivative and includes Laplacian operator. 3. Laplacian of Gaussian (LoG), which combines Gaussian filtering with the Laplacian. 4. Gaussian edge detectors, which is symmetric along the edge and reduce the noise by smoothing the images. 5. Colored edge detectors, which are divided into three categories output fusion method. Sharifi, Fathy & Mahmoudi (2002) clarify some advantages and disadvantages of each edge detector above as well. The advantage of Gradient or Classical edge detectors is the simplest algorithm, but they are sensitive to noise and inaccurate in detecting the edges. While the Zero crossing has an advantage by having the fixed characteristics in its all direction, but it is sensitive to noise as well. Laplacian of Gaussian can be used to find the correct places of the edges and to test wider area around the pixel, but it can not finding the orientation of edge because of using the Laplacian filter. Another detector is Gaussian which uses probability to find the error rate, localization and response, to improve signal to CIS Research Method Page 4 of 30 the noise ratio, and gives better detection especially in noise conditions, but the computational process is very complex and time consuming. The last one is Colored edge detector which is more accurate in detection the edges and more efficient in object recognition, but the computational process is very complex as well. Nowadays, the use of edge detection which has a significant impact on image processing that has been implemented in many areas; it is not only in academic areas but also in industries. For example, a goal of achieving 100% quality assurance of all parts, subassemblies, and finished goods is an obligation for mass-production manufacturing facilities. Since the inspection is done by human, it will give a big time consuming, and increase the processes’ costs (Rosas, de Luca & Santillan 2005). But, by the image processing application, those problems can be solved, and automatic systems can handle the human responsibilities in the inspection. The automatic systems that can be used to handle the human activities should have a very small error, or very close to zero. It should have a capability to doing its process with high speed processor. While since it was developed, the image processing algorithms have been implemented based on software. Nowadays, the high performance machines are needed to do the computational processes that become more complex due to the needs of good quality in the detection process. Due to this, the FPGA is one attractive alternative solution. There is one the most important thing before deciding to choose the edge detection algorithm for images or objects identification or inspection to handle the human activities. That is the need of evaluation in term of the accuracy of the edge detection results. 1.1 Motivation Shin et al. (2001) say that due to the ease of to have reliable pixel-based ground truth is motivated them to using the synthetic images in their research, but Heath et al. (1997) claim that there are three ideas to evaluate the edge detector methods; the comparison method should be done using the real images, the evaluation method should produce results that correlate with the perceived quality of edge images, and the edge detectors should be evaluate within a vision system performing a task. It is clear that for this proposed research, the real images that will be captured from the real objects should be used. Even though the performance analysis is difficult to be done, some minimum factors CIS Research Method Page 5 of 30 could be involved in the process, such as the algorithm itself, the type of images used, the edge detector parameters used, and the methods to evaluate the edge detectors. Due to the advantage of rapid prototyping and ease of verification, the FPGA is a good choice to implement the image processing (Hsiao et al. 2006). Some related works tried to compared the performance of edge detection in term of speed evaluation between an FPGA based and software based such as (Daggu Venkateshwar & Muthukumar 2004), (Muthukumar & Rao 2004), and (Wenhao & Kui 2008), and some others have just compared the performance of each algorithm based on software by using the different ways of evaluation, such as Shin et al. (2001), Sharify, Fathy, & Mahmoudy (2002), and Yu, Y-H, and Chang (2000). While Verderber, Zemva & Trost (2001), Hirai et al. (2005), Pei-Yung et al. (2005), Rosas, de Luca & Santillan (2005), Jay (2006), Abbasi & Abbasi (2007), Bin Mohamed Shukor, Lo Hai & Sebastian (2007), and Yasri, Hamid & Yap (2008) just tried to implement the edge detection algorithm on the FPGA. On the other hand, some works related to the implementation of image processing based on reconfigurable hardware have been done as well (Hsiao et al. (2006), Lapalme, Amer & Wang (2006), and Lorca, Kessal & Demigny (1997)). An improved Canny edge detector that uses the self-adaptive threshold method has been conducted in term of performance analysis by doing comparison between software and hardware based such as (Wenhao & Kui 2008), while a new edge detection approach based on image context analysis has just been implemented on the software based, and claimed as a better algorithm compared with others (Yu & Chang 2006). These two previous work (Yu & Chang 2006) and (Wenhao & Kui 2008) which are claimed have a better performance with no comparison between them influence this proposed research to implement these new approach, and doing the correctness comparisons in term of performance analysis on both hardware (FPGA) and software based. Due to the decision of the correctness is much better made by human compared with machines, this is motivated this proposed research to compare the result of edged image that produced by those two edge detection algorithms to the hand edged image that produced by human which are defined in advance in both software and FPGA based. CIS Research Method Page 6 of 30 1.2 Research Question The edge detection application is very useful in computer vision research area. The need of high speed computational process of image processing, pattern recognition, or object inspection lead this proposed research to apply the edge detection algorithm into an FPGA which has the ability of parallelizing the processes, high computational density, and the availability of large amount of memory (Bin Mohamed Shukor, Lo Hai & Sebastian (2007), and Abbasi & Abbasi (2007)). Even though the FPGA has the high speed computational process compared to the computers, the correctness of the result of the edge detection algorithm should be measured as well. This is an important part before deciding to implement the object or pattern recognition into the FPGA or computer based in the next step of image processing. To answer this, the proposed research has a main question; how precise are the edge detection algorithms to find the exact edges of the image? When the result of this proposed research is achieved, the next step of image processing like an image or object recognition or identification can use the best algorithm rather than doing any other comparison. 1.3 Scope and Contribution Due to some previous works related to performance analysis and evaluation between some edge detection algorithms have been implemented and show that Canny edge detector has a good performance compared with others, while there is no comparison between an improved Canny edge detector that has been implemented by Wenhao & Kui (2008) and a new edge detection approach based on context analysis that has been done by Yu & Chang (2006), this proposed research will use those two new improved algorithms in both FPGA and software based. The hand made edged image will be used in this proposed research to compare the correctness of the edge detection result of those two algorithms. The result of this proposed research could give a contribution in deciding which algorithm can be used in term of object or image recognition or inspection for further works. CIS Research Method Page 7 of 30 2. Literature Review Some related works are discussed in this section. Firstly, some previous works related to the performance evaluation of some edge detection algorithms will be presented, and then followed by some works related to the implementation of edge detection on the FPGA, the comparison of the performance of some edge detection algorithms on FPGA and software based. Some related works on the implementation of new approach in edge detection area will be provided, and finally, some works related to reconfigurable FPGA will be presented in this proposed research to prove that an FPGA is a good choice in implementing image processing due to it some good capabilities compared to computers or general purposed microprocessors. 2.1 Performance evaluation of edge detection on software Heath et al. (1997) claim that even though it is difficult to access the performance of edge detection algorithm, there are at least four minimum factors that are considered to measure its performance; those are the algorithm itself, the type of image used, the edge detector used, and the method to evaluate the edge detectors. There are some previous ways used to evaluate the edge detection method. First of all, a theoretical evaluation instead of algorithm and then evaluation using ground truth method. Theoretical evaluation is applying a mathematical analysis instead of its algorithm that is being applied to the images. This method is used to characterize the input signals and the noise, but this evaluation method is being difficult for very complex algorithm of modern edge detection methods. While the evaluation method using ground truth is used to compare the differences between the detected edge and the ground truth. This is applied by measuring the ratio of the number of the correctly detected edge pixels divided by the number of detected edge pixels and the fraction of a line covered by edge pixels. But this method depends on the ground truth that make it just relies on the synthetic images or simple real images because these kinds of images make it easy to specify the ground truth. Liu & Haralick (2000) says that the algorithm that has the best performance is the one whose output is closest to the judgment. They used the assignment based method and the distance based method to compare the declared edge map with the ground truth edge map, while the performance are measured by the number of misdetected edge pixels, number of false alarms, and the root-mean-squared errors of localization error for those two methods. CIS Research Method Page 8 of 30 On the other work (Shin et al. 2001) has compared and evaluated eight edge detection algorithms; Anisotropic, Bergholm, Canny, Heitger, Rothwell, Sarkar, Sobel, and Susan using from motion task algorithm. This algorithm determines the structure of a scene and the motion of the camera. The performance of edge detector is measured by how accurate the SFM (Structure from Motion) motion recovers the known structure and motion from the edge detection of the image sequences. To minimize the objective function that measures disparity between the projected-3D line and its corresponding observed-2D line, the SFM algorithm iterates searching for the structure and motion estimates. The SFM generates the initial random guess of camera position for each iteration using the initial motion information, and this algorithm usually manages to converge to a solution but after a great number of iterations. To speed up the optimization process, the ground truth has been used as a good initial guess. The result shows that the Canny edge detector is the best test performance and the best robustness in convergence. It is also faster in executing the algorithm. While Sharifi, Fathy & Mahmoudi (2002) classify and compare five edge detectors such as gradient edge detectors, zero crossing, Laplacian of Gaussian (LoG), Gaussian, and Colored edge detectors. They used signal to noise ratio (SNR) and average risk (AVR) as parameters in comparison the performance. Sharifi, Fathy & Mahmoudi (2002) claim that Canny edge detector has the best performance compared with others, but it requires more computational process. 2.2 The implementation of the edge detection algorithm on FPGA The work of the real-time implementation (Bin Mohamed Shukor, Lo Hai & Sebastian 2007) is motivated by the potential of FPGA by having parallel and high computational density compared to general purpose microprocessor. Their implementation shows the edge of the objects can be produced in real time by comparing the first and second input pixel at the same time. They used Altera Quartus II on DE2 FPGA development board, and 1.5 MP Terasic CMOS camera. There are some steps need to be done in their implementation, first of all is loading the image data from SDRAM, secondly is setting the gray scale level, then detecting the edge on horizontal and vertical axis, continued by combining that horizontal and vertical edge results, and finally, load the image data from the SRAM to the on board memory of FPGA that can be shown on the screen. While Abbasi & Abbasi (2007) say that due to the availability of large memory of FPGA was motivated them to implement the edge detection algorithm on it. They used Sobel edge detection algorithm which is based on a first derivative operation and the simplest one to implement it on the FPGA. With the size of 512 x 512 test images which has 256 gray CIS Research Method Page 9 of 30 scale, they system can calculate the edge of the image in 2.65ms with 99.49 MHz clock. On the other hand, the performance analysis has been investigated in the implementation of edge detection based on Sobel edge detection algorithm on FPGA. This shows that it can be operated successfully at 27 MHz clock (Yasri, Hamid & Yap 2008). Another advanced work (Rafla 2007) implements Soble edge detection algorithm combined with the genetic algorithm to perform the reconfiguration operation on the same FPGA. This means the needs of the architecture that can change its behavior dynamically to adapt the changes in the surrounding environment. The process is started by selecting a set of chromosomes stored in an array of registers, and then a fitness value calculated using the outputs of a pre-specified set of inputs and the threshold. This process is repeated for all other configurations in the initial population and a new better population is generated. This just shows that the FPGA can accept some kinds of the bit stream configuration that has been produced. There are no any performance evaluations in this project. The work on real-time vision (Hirai et al. 2005) is one example of the implementation of edge detection on the FPGA whereas they designed a special logic circuit for vision algorithm and then implemented that logic circuit on an FPGA. The hardware they used is a FPGA board Xilinx Vertex 2000-E, a video decoder and encoder, SRAM, and PC interface. While the algorithms they used are designed using C/C++, and the CycleC is used as the system compiler to translate the C/C++ language into HDL description. There are three vision algorithms are used in the implementation such as the computation of the image gravity center, detection of object orientation using a radial projection, and the computation of Hugh transform. The comparison between the algorithm which running on FPGA and on software based are no shown in this project. Canny cited in (Pei-Yung et al. 2005) says that there are three important factors to evaluate the performance of edge detection; the ability to resist noise, the ability to mark edge points as close as to the center of the true edge, and the connectivity and completeness of detected edges. In their research, they compared non-gradient based LGT (Local and Global Threshold) and gradient-based ADM (Absolute Difference Mask) algorithm. The LGT is a threshold-based algorithm which locates edge points of images using statistical and global threshold values, while the ADM algorithm is a noise-immune three stage algorithm that are passing the inputted images through the semi-Gaussian smoothing unit, and then that image is used to detect the edge strength and edge CIS Research Method Page 10 of 30 detection, and finally the edge points of the original images is obtained using those edge strength and edge detection. The comparison shows that LGT algorithm is more sensitive to the fore-scene edge, while ADM algorithm provides more complete edge mapping of the original images. Other kind of related work has been done by implementing the 2D DFT (Discrete Fourier Transform) (Verderber, Zemva & Trost 2001). This will be an efficient way for filtering an image if the size of image is relatively small (8 x 8) pixels. Due to this, to process the large size of image, it should be divided into some pieces depend on its size. The partial images are then converted 2D DFT domain, and then applying a filtering process by doing point by point multiplication. The filtered partial image is then converted back to spatial domain by implementing 2D IDFT (Inverse Discrete Fourier Transform) operation. At the end, the partial images combined back together to be one single image. This algorithm has been implemented on the software based first, and then implemented on the FPGA without any comparison in term of performance between them. The result shows the algorithm is executed successfully in real time processing, but the problem is the delay between circuit block within the FPGA and all internal signals. This can be solved by synchronization between them. The advantage of the FPGA’s capabilities of parallel processing to reduce the time needed has been investigated to handle the human inspection in manufacturing industries (Rosas, de Luca & Santillan 2005). This research used two external memories which are connected to one FPGA. The first external memory is used to store the image that is read by a CMOS sensor, and the second one is to store the image that is processed by the FPGA, while the Sobel edge detector was used in their implementation. 2.3 The performance comparison between the implementation of edge detection algorithm on FPGA based and software based The specific hardware implementation offers much greater speed than a software implementation, and with the VLSI (Very Large Scale Integrated) the hardware technology has become an attractive alternative (Muthukumar & Rao 2004), and HDL (Hardware Design Language) has been used traditionally to configure the FPGA. A new C like hardware design language called Handle-C that is introduced by Celoxica has been used to implement the edge detection algorithm on FPGA in their research. Muthukumar & Rao (2004) has done the comparison between three different image processing algorithms; CIS Research Method Page 11 of 30 Median filter, Gaussian convolution, and edge detection. Those algorithms are compared based on running on FPGA and software. First of all, the Median filter is used in their implementation due to its capability to remove impulse noise effectively. This filter is operated by sliding a window of odd size (3 x 3) over an image. The value of the pixel image are sorted as a sample at each window position, and the median value of the sample is taken as the output and replace the value of the pixel image at that position. The result shows that the algorithm can be executed successfully on the FPGA 19.92 time faster than on computer based Pentium III 1300MHz. Then the Gaussian convolution algorithm uses a window with some finite size to scan over an image, and the weight sum of the input pixels within the window are the result value of the convolution process. This algorithm shows that it is 11.83 times faster running on the FPGA compared with running on computer based Pentium III 1300MHz. Finally, the basic edge detection algorithm has been implemented within four stages; image smoothing, vertical and horizontal gradient calculation, directional non maximum suppression, and threshold. The result of this algorithm shows that FPGA has 11.19 times faster compared with computer based Pentium III 1300MHz. On the other research, Daggu Venkateshwar & Muthukumar (2004) get similar comparison, and claim that the implementation of edge detection on reconfigurable hardware can minimize the time-to-market costs, enable rapid prototyping of complex algorithms, and simplify debugging and verification processes. Some general steps of edge detection algorithm such as image smoothing, vertical and horizontal gradient calculation, and threshold should be implemented similar to the implementation on the software based. The Gaussian convolution and 2-D first derivative operator has been used respectively in implementing image smoothing. The input of 2-D first derivative is based on the output of Gaussian convolution. The result shows that the edge detection running on FPGA is 22.38 times faster than running on computer based Pentium III 1300MHz, and this algorithm is exactly 2 times faster compared to (Muthukumar & Rao 2004). On the other hand, due to the threshold in the traditional edge detection algorithm should be set manually, the self-adapted threshold Canny has been proposed to solve that problem (Wenhao & Kui 2008). This algorithm uses a flat that is shown between the background peak and the first edge peak in the histogram. The flat part is located by convert the gradient magnitude histogram into difference histogram. This is one method that can be implemented in this proposed research. CIS Research Method Page 12 of 30 2.4 Advanced implementation of image processing algorithm and reconfigured FPGA Some other advance works related to the implementation of image processing on the FPGA have been implemented. Draper et al. (2000) improved the image processing algorithm using the SA-C, this is a single-assignment variant of the C programming language. The algorithm is written using SA-C and then converted automatically into HDL and compiled into the FPGA. While the design of hardware that make it has a capability to processing an image using a high-resolution CCD sensor has been implemented by Hussmann & Ho (2003). In term of the reconfigurable architecture of an FPGA, a hardware architecture of the Sobel edge detection algorithm has been presented on the project named FPGA in a vehicle collision avoidance system (VCAS) (Li, Zhao & Wang 2003), and on the line detection system (Dongkyun et al. 2008). While the architecture of lane detection has been done by Pankiewicz, Powiertowski & Roszak (2008), a method for modeling and FPGA implementation of non-static has been applied by Nikolov, Stefanov & Deprettere (2005), and the issues arising due to the resource constraints of the FPGA has been investigated by Memik, Katsaggelos & Sarrafzadeh (2003). These all show that an FPGA is the best alternative to implement the image processing compared with the computer regarding some issues such as costs and speeds. On the other hand, by reconfiguring the FPGA, the use of memory size can be reduced using Deriche filter (Lorca, Kessal & Demigny 1997), and the speed of algorithm processing can be increased much faster than computer by pipelined its processes (Hsiao et al. 2006). Lapalme, Amer & Wang (2006) has been successful to implement the noise estimation of real-time video by reconfiguring their own architecture, and one advanced work by exploiting the I/O bandwidth has been investigated successfully by Miaoqing et al. (2008). Those kinds of reconfigurable FPGA have proved that it has a good performance to implement the image processing compared with the computer based, but it will be useful after the best algorithm is known. This means that the future work will be conducted to reconfigure the FPGA using the best algorithm based on the result of this proposed research. CIS Research Method Page 13 of 30 3. Methodology The objective of this proposed research is to answer how precise the edge detection algorithms to find the exact edges of the image are. The experiment will be conducted by comparing the edged image which is produced by the edge detection algorithm and the hand made edged image. Some methodologies need to be conducted to achieve the objective of this proposed research, such as defining the hand made edged image and the algorithms that will be used in the implementation on both software and FPGA based. 3.1 Hand made edged image The definition of hand made edge image is the edged image that is drawn manually. The flow chart below explains how to produce the hand made edged image. start A Image capturing Hand made edged image scanning Image printing Edged image drawing manually A Store the position of hand made edged image into the memory start Fig.1 Hand made edged image producing First of all, the real object needs to be captured; then the captured image needs to be printed, and then draw the edge of the image by following that printed image. The next step is scanning the hand made edged image, than read each pixel of the image, and store its value into the file. This file will be stored into the hard drive of computer, while each value of pixel will be store into the memory of the FPGA. The most important part of hand made edged image processing is to choose the appropriate tool to draw the edge of the image manually. Some experiments of this need CIS Research Method Page 14 of 30 to be done because of the drawing tool have to have the similarity of the thickness of the pixel. 3.2 Edge detection algorithms Two edge detection algorithms will be evaluate in term of the correctness of the edged result in this proposed research. The first is an improved Canny edge detectors (Wenhao & Kui 2008), and the second is the new edge detection approach based on image context analysis (Yu & Chang 2006). 3.2.1 The introduction of the improved Canny edge detection algorithm The Canny edge detector is considered as a standard method of edge detection algorithm (Shin et al. 2001), and devised to be an optimal edge detector (Yu & Chang 2006). While the improved Canny edge detector use the self-adaptive threshold edge detector to minimize some spurious edges (Wenhao & Kui 2008). This has been implemented on the FPGA, and not been compared to the software based yet. The basic idea of this improved Canny edge detector is to obtain the self adaptation of the threshold value in the traditional Canny algorithm. Even though the traditional Canny edge detector can give a good result in detecting the edge of image by adjusting the value of the threshold manually, this will be difficult since the edge-to-ground ratio can not be predicted in advanced. Fig. 2 Gradient magnitude histogram (Wenhao & Kui 2008) CIS Research Method Page 15 of 30 Figure 2.a above shows one of the gradient magnitudes of histogram of a ceiling image after NMS (Non-Maximum Suppression) stage, and figure 2.b shows the enlargement of figure 2.a. The similar histograms are also given for some kinds of illumination condition of the images. Wenhao & Kui (2008) found that this kind of histograms has some following properties, such as: There is a large peak near the origin in the histogram which corresponds to the background of the image. There is the similarity intensity between the edge pixels which form a series of little peaks in the histogram and each peak which corresponds to a class of edges. There is a flat part between the background peak and the first edge peak in the histogram, where this part is usually chosen for the threshold in the traditional Canny algorithm. 3.2.1.1 Self-adaptive threshold value setting The basic idea of the self-adaptive threshold value is to locate the flat part in the gradient magnitude histogram by converting it into a difference histogram. The equation above (Wenhao & Kui 2008) shows how to convert the gradient magnitude histogram into a difference histogram, and NMS(i) is used as the output of the NMS operator. The value of threshold will be chosen from the gradient magnitude of the firstzero crossing point, it needs to be calculated as the following equation (Wenhao & Kui 2008). 3.2.1.2 The methodology of improved Canny algorithm Wenhao & Kui (2008) implement this improved Canny algorithm into an FPGA. There are some stages need to be done to implement this algorithm, such as image smoothing, CIS Research Method Page 16 of 30 gradient calculation and non-maximum suppression (NMS), calculating 2 threshold, and threshold with hysteresis. Fig. 3 Design flow of improve Canny edge detection algorithm Firstly, the image smoothing is done by implementing the Gaussian convolution using 5 x 5 moving window. The output of this stage is used for the next stage, gradient calculation and directional non-maximum suppression. Since the actual images are always discrete, Wenhao & Kui (2008) define the direction as vertical, horizontal, left-diagonal, and rightdiagonal of the 3 x 3 adjacent window of the current pixel, and then the first-derivative of each direction is calculated using the following equation. Next stage is threshold calculation. Due to this improved algorithm has been implemented on the FPGA, the analysis of the general algorithm should be done if it will be implemented on the software based. In this stage, the pixel with certain gradient magnitude will be taken as the address of the registers array, and the content of this register will be then accumulated by 1. The difference which is calculated between the content of the register and the next address register will be compared by a comparison unit with 0, if the difference is 0, a stop signal will be generated to stop the accumulating process, and will be continued if not. The last stage is the threshold with hysteresis. The two thresholds which are high (Thh) and low (ThL) are employed in this stage. If the gradient magnitude of f1(I, j) is above Thh set f1(I, j) to be 1, otherwise set as 0. If the gradient magnitude between Thh and Thl set f2(I, j) to be 1, else set it to be 0. f1 represents the strong edge image, while f2 represents the weak edge image. CIS Research Method Page 17 of 30 3.2.2 A new edge detection approach based on image context analysis This new approach has four main stages; color to grayscale image transformation, prediction, threshold, and thinning. The image context analysis in this algorithm is based on gradient-adjusted prediction (GAP) which is adopted in context-based adaptive lossless image coding (CALIC). A context which is used in the GAP predictor is a combination of the intensity value of neighboring pixels that have already processed and a template to produce the predictive values. This is used to define whether the current pixel is an edge or not (Yu & Chang 2006). 3.2.2.1 GAP predictor The GAP is a nonlinear predictor that can make itself adapt to the intensity gradients near the pixel to be predicted (Yu & Chang 2006). Fig. 4 Template used by GAP (Yu & Chang 2006) GAP uses the gh and gv that are shown on the equation above (Yu & Chang 2006) to compute the gradient of intensity near the current pixel in the horizontal and vertical direction. While the detection of the magnitude and orientation for an edge across the casual template is based on the difference of gh and gv. CIS Research Method Page 18 of 30 Yu & Chang (2006) give an algorithm of GAP prediction procedure that is shown below. 3.2.2.2 The methodology of new approach of edge detection algorithm based on image context analysis Firstly, the input color image is transformed into grayscale image. The predictive error values are then produced by applying the image is fed into the GAP predictor. The pixels in the image are classified into two groups using a fixed threshold TH1. If a pixel whose corresponding absolute value of the predictive error value is greater than or equal to TH1, it will be classified as an edge point and marked as ‘0’. Otherwise, it will be classified into non-edge point and marked as ‘255’. A thinning procedure is involved to thin the edges. The intensity variations of the original edge image are scanned in horizontal and vertical directions, and then a combination operation of resultant edge is performed using the OR logical operation to produce the final edge image. In general, this new approach process is shown on the flowchart below. Fig. 5 The flowchart of new approach (Yu & Chang 2006) CIS Research Method Page 19 of 30 Fig. 6 An example of the prediction and threshold process (Yu & Chang 2006) Fig. 7 An example of thinning process (Yu & Chang 2006) CIS Research Method Page 20 of 30 3.3 The correctness evaluation of edge position How precise those two algorithms in detecting the edge of an image are will be evaluated in this proposed research. start start Capturing the real image Capturing the real image Image processing using 1st Algorithm Image processing using 2nd Algorithm The correctness comparison Hand made edged image The correctness comparison Which algorithm is the best? end Fig. 6 The correctness evaluation procedure Figure 6 above shows the procedure that will be conducted to evaluate the correctness of edged image that is produced by each algorithm compared with the hand made edged image. The comparison will be done by checking the similarity of the position of each pixel of the edged image from the algorithm and the hand made edged image. 3.4 Expected outcomes This proposed research is expected to give a contribution in image or object recognition or identification. After the comparison process between two algorithms that have been explained on point 3.3 and 3.4 on both software and FPGA based, the result is supposed to show which algorithm will give the best performance in term of the correctness of edge position from the edged image that is produced by each algorithm. CIS Research Method Page 21 of 30 3.5 Future work The opportunities of future work can be predicted now, even though the expected outcome has not been achieved yet. Automatic number plate recognition is an example of further work that can use the outcome of this proposed research. The best algorithm and machine will be used in the implementation of future work which is focusing in the real time automatic number plate recognition. CIS Research Method Page 22 of 30 4. Schedule Month of No Activities 2009 8 1 9 10 2010 11 12 1 2 3 4 5 6 7 Choosing and evaluating the best tool for Hand made edge image 2 Selecting the available camera and FPGA board 3 Designing and writing an algorithm to read and store the hand made edged image using C/C++ into a file 4 Designing and writing an algorithm to compare two edged image in C/C++ 5 Studying and consulting to the author of improved Canny edge detection algorithm 6 Writing and implementing improved Canny edge detection algorithm in C/C++ 7 Testing the improved Canny edge detection 8 Studying and consulting to the author of new approach of edge detection algorithm based on image context analysis 9 Writing and implementing new approach of edge CIS Research Method Page 23 of 30 Month of No Activities 2009 8 9 10 2010 11 12 1 2 3 4 5 6 7 detection algorithm based on image context analysis in C/C++ 10 Testing the new approach of edge detection algorithm based on image context analysis 11 Comparing and analyzing the result of point 7 and 10 12 Writing and implementing improved Canny edge detection algorithm in an FPGA 13 Testing the improved Canny edge detection 14 Writing and implementing new approach of edge detection algorithm based on image context analysis in an FPGA 15 Testing the new approach of edge detection algorithm based on image context analysis 16 Comparing and analyzing the result of point 13 and 15 17 Comparing and analyzing the result of point 11 and 16 as the final comparison 18 Writing report CIS Research Method Page 24 of 30 5. References Abbasi, TA & Abbasi, MU 2007, 'A novel FPGA-based architecture for Sobel edge detection operator', International Journal of Electronics, vol. 94, no. 9, pp. 889-896. Bin Mohamed Shukor, MN, Lo Hai, H & Sebastian, P 2007, 'Implementation of real-time simple edge detection on FPGA', paper presented at the Intelligent and Advanced Systems, 2007. ICIAS 2007. International Conference on. Daggu Venkateshwar, R & Muthukumar, V 2004, 'An efficient reconfigurable architecture and implementation of edge detection algorithm using Handle-C', paper presented at the Information Technology: Coding and Computing, 2004. Proceedings. ITCC 2004. International Conference on. Dongkyun, K, Seung Hun, J, Nguyen Tuong, T, Ki Hoon, K & Jae Wook, J 2008, 'A realtime finite line detection system based on FPGA', paper presented at the Industrial Informatics, 2008. INDIN 2008. 6th IEEE International Conference on. Draper, B, Najjar, W, Bohm, W, Hammes, J, Rinker, B, Ross, C, Chawathe, M & Bins, J 2000, 'Compiling and optimizing image processing algorithms for FPGAs', paper presented at the Computer Architectures for Machine Perception, 2000. Proceedings. Fifth IEEE International Workshop on. He, Q & Zhang, Z 2007, 'A new edge detection algorithm for image corrupted by WhiteGaussian noise', AEU - International Journal of Electronics and Communications, vol. 61, no. 8, pp. 546-550. Heath, MD, Sarkar, S, Sanocki, T & Bowyer, KW 1997, 'A robust visual method for assessing the relative performance of edge-detection algorithms', Pattern Analysis and Machine Intelligence, IEEE Transactions on, vol. 19, no. 12, pp. 1338-1359. Hirai, S, Zakoji, M, Masubuchi, A & Tsuboi, T 2005, 'FPGA-Based Realtime Vision System', Journal of Robotics and Mechatronics, vol. 17, no. 4, pp. 1-10. Hsiao, PY, Chen, CH, Wen, H & Chen, SJ 2006, 'Real-time realisation of noise-immune gradient-based edge detector', Computers and Digital Techniques, IEE Proceedings -, vol. 153, no. 4, pp. 261-269. Hussmann, S & Ho, TH 2003, 'A high-speed subpixel edge detector implementation inside a FPGA', Real-Time Imaging, vol. 9, no. 5, pp. 361-368. Jay, K 2006, 'Hardware Edge Detection using an Altera Stratix NIOS2 Development Kit', paper presented at the Electrical and Computer Engineering, 2006. CCECE '06. Canadian Conference on. Lapalme, Fo-X, Amer, A & Wang, C 2006, 'FPGA ARCHITECTURE FOR REAL-TIME VIDEO NOISE ESTIMATION', IEEE, pp. 3257-3260. Li, X, Zhao, R & Wang, Q 2003, 'FPGA based Sobel algorithm as vehicle edge detector in VCAS', paper presented at the Neural Networks and Signal Processing, 2003. Proceedings of the 2003 International Conference on. CIS Research Method Page 25 of 30 Liu, G & Haralick, RM 2000, 'Assignment problem in edge detection performance evaluation', paper presented at the Computer Vision and Pattern Recognition, 2000. Proceedings. IEEE Conference on. Lorca, FG, Kessal, L & Demigny, D 1997, 'Efficient ASIC and FPGA implementations of IIR filters for real time edge detection', paper presented at the Image Processing, 1997. Proceedings., International Conference on. Memik, SO, Katsaggelos, AK & Sarrafzadeh, M 2003, 'Analysis and FPGA implementation of image restoration under resource constraints', Computers, IEEE Transactions on, vol. 52, no. 3, pp. 390-399. Miaoqing, H, Serres, O, Lopez-Buedo, S, El-Ghazawi, T & Newby, G 2008, 'An Image Processing Architecture to Exploit I/O Bandwidth on Reconfigurable Computers', paper presented at the Programmable Logic, 2008 4th Southern Conference on. Muthukumar, V & Rao, DV 2004, 'Image processing algorithms on reconfigurable architecture using HandelC', paper presented at the Digital System Design, 2004. DSD 2004. Euromicro Symposium on. Nikolov, H, Stefanov, T & Deprettere, E 2005, 'Modeling and FPGA implementation of applications using parameterized process networks with non-static parameters', paper presented at the Field-Programmable Custom Computing Machines, 2005. FCCM 2005. 13th Annual IEEE Symposium on. Pankiewicz, P, Powiertowski, W & Roszak, G 2008, 'VHDL implementation of the lane detection algorithm', paper presented at the Mixed Design of Integrated Circuits and Systems, 2008. MIXDES 2008. 15th International Conference on. Pei-Yung, H, Le-Tien, L, Chia-Hsiung, C, Szi-Wen, C & Sao-Jie, C 2005, 'An FPGA architecture design of parameter-adaptive real-time image processing system for edge detection', paper presented at the Emerging Information Technology Conference, 2005. Rafla, NI 2007, 'Evolvable Reconfigurable Hardare framework for edge detection', paper presented at the Circuits and Systems, 2007. MWSCAS 2007. 50th Midwest Symposium on. Rosas, RL, de Luca, A & Santillan, FB 2005, 'SIMD architecture for image segmentation using Sobel operators implemented in FPGA technology', paper presented at the Electrical and Electronics Engineering, 2005 2nd International Conference on. Sharifi, M, Fathy, M & Mahmoudi, MT 2002, 'A classified and comparative study of edge detection algorithms', paper presented at the Information Technology: Coding and Computing, 2002. Proceedings. International Conference on. Shin, MC, Goldgof, DB, Bowyer, KW & Nikiforou, S 2001, 'Comparison of edge detection algorithms using a structure from motion task', Systems, Man, and Cybernetics, Part B: Cybernetics, IEEE Transactions on, vol. 31, no. 4, pp. 589-601. Verderber, M, Zemva, A & Trost, A 2001, 'Implementation of IDFT algorithm', paper presented at the EUROCON'2001, Trends in Communications, International Conference on. CIS Research Method Page 26 of 30 Wenhao, H & Kui, Y 2008, 'An improved Canny edge detector and its realization on FPGA', paper presented at the Intelligent Control and Automation, 2008. WCICA 2008. 7th World Congress on. Yasri, I, Hamid, NH & Yap, VV 2008, 'Performance analysis of FPGA based Sobel edge detection operator', paper presented at the Electronic Design, 2008. ICED 2008. International Conference on. Yu, Y-H & Chang, C-C 2006, 'A new edge detection approach based on image context analysis', Image and Vision Computing, vol. 24, no. 10, pp. 1090-1102. CIS Research Method Page 27 of 30 6. Bibliography Abbasi, TA & Abbasi, MU 2007, 'A novel FPGA-based architecture for Sobel edge detection operator', International Journal of Electronics, vol. 94, no. 9, pp. 889-896. Bin Mohamed Shukor, MN, Lo Hai, H & Sebastian, P 2007, 'Implementation of real-time simple edge detection on FPGA', paper presented at the Intelligent and Advanced Systems, 2007. ICIAS 2007. Daggu Venkateshwar, R & Muthukumar, V 2004, 'An efficient reconfigurable architecture and implementation of edge detection algorithm using Handle-C', paper presented at the Information Technology: Coding and Computing, 2004. Proceedings. ITCC 2004. Demigny, D, Kessal, L, Bourguiba, R & Boudouani, N 2000, 'How to use high speed reconfigurable FPGA for real time image processing?', paper presented at the Computer Architectures for Machine Perception, 2000. Proceedings. Fifth IEEE. Dongkyun, K, Seung Hun, J, Nguyen Tuong, T, Ki Hoon, K & Jae Wook, J 2008, 'A realtime finite line detection system based on FPGA', paper presented at the Industrial Informatics, 2008. INDIN 2008. 6th IEEE. Draper, B, Najjar, W, Bohm, W, Hammes, J, Rinker, B, Ross, C, Chawathe, M & Bins, J 2000, 'Compiling and optimizing image processing algorithms for FPGAs', paper presented at the Computer Architectures for Machine Perception, 2000. Proceedings. Fifth IEEE. Elder, JH & Zucker, SW 1998, 'Local scale control for edge detection and blur estimation', Pattern Analysis and Machine Intelligence, IEEE Transactions on, vol. 20, no. 7, pp. 699716. Guangyu, L & Rensheng, C 2008, 'A Simple and Efficient Edge Detection Algorithm', paper presented at the Computer Science and Computational Technology, 2008. ISCSCT '08. He, Q & Zhang, Z 2007, 'A new edge detection algorithm for image corrupted by WhiteGaussian noise', AEU - International Journal of Electronics and Communications, vol. 61, no. 8, pp. 546-550. Heath, MD, Sarkar, S, Sanocki, T & Bowyer, KW 1997, 'A robust visual method for assessing the relative performance of edge-detection algorithms', Pattern Analysis and Machine Intelligence, IEEE Transactions on, vol. 19, no. 12, pp. 1338-1359. Hirai, S, Zakoji, M, Masubuchi, A & Tsuboi, T 2005, 'FPGA-Based Realtime Vision System', Journal of Robotics and Mechatronics, vol. 17, no. 4, pp. 1-10. Hsiao, PY, Chen, CH, Wen, H & Chen, SJ 2006, 'Real-time realisation of noise-immune gradient-based edge detector', Computers and Digital Techniques, IEE Proceedings -, vol. 153, no. 4, pp. 261-269. Hussmann, S & Ho, TH 2003, 'A high-speed subpixel edge detector implementation inside a FPGA', Real-Time Imaging, vol. 9, no. 5, pp. 361-368. CIS Research Method Page 28 of 30 Jay, K 2006, 'Hardware Edge Detection using an Altera Stratix NIOS2 Development Kit', paper presented at the Electrical and Computer Engineering, 2006. CCECE '06. Lapalme, Fo-X, Amer, A & Wang, C 2006, 'FPGA ARCHITECTURE FOR REAL-TIME VIDEO NOISE ESTIMATION', IEEE, pp. 3257-3260. Laplante, P 2004, 'One Instruction Set Computers for Image Processing', The Journal of VLSI Signal Processing, vol. 38, no. 1, pp. 45-61. Li, X, Zhao, R & Wang, Q 2003, 'FPGA based Sobel algorithm as vehicle edge detector in VCAS', paper presented at the Neural Networks and Signal Processing, 2003. Liu, G & Haralick, RM 2000, 'Assignment problem in edge detection performance evaluation', paper presented at the Computer Vision and Pattern Recognition, 2000. Proceedings. IEEE Lorca, FG, Kessal, L & Demigny, D 1997, 'Efficient ASIC and FPGA implementations of IIR filters for real time edge detection', paper presented at the Image Processing, 1997. Memik, SO, Katsaggelos, AK & Sarrafzadeh, M 2003, 'Analysis and FPGA implementation of image restoration under resource constraints', Computers, IEEE Transactions on, vol. 52, no. 3, pp. 390-399. Miaoqing, H, Serres, O, Lopez-Buedo, S, El-Ghazawi, T & Newby, G 2008, 'An Image Processing Architecture to Exploit I/O Bandwidth on Reconfigurable Computers', paper presented at the Programmable Logic, 2008 4th Muthukumar, V & Rao, DV 2004, 'Image processing algorithms on reconfigurable architecture using HandelC', paper presented at the Digital System Design, 2004. Nikolov, H, Stefanov, T & Deprettere, E 2005, 'Modeling and FPGA implementation of applications using parameterized process networks with non-static parameters', paper presented at the Field-Programmable Custom Computing Machines, 2005. FCCM 2005. 13th Annual IEEE Symposium on. Pankiewicz, P, Powiertowski, W & Roszak, G 2008, 'VHDL implementation of the lane detection algorithm', paper presented at the Mixed Design of Integrated Circuits and Systems, 2008. MIXDES 2008. 15th International Conference on. Pei-Yung, H, Le-Tien, L, Chia-Hsiung, C, Szi-Wen, C & Sao-Jie, C 2005, 'An FPGA architecture design of parameter-adaptive real-time image processing system for edge detection', paper presented at the Emerging Information Technology Conference, 2005. Rafla, NI 2007, 'Evolvable Reconfigurable Hardare framework for edge detection', paper presented at the Circuits and Systems, 2007. MWSCAS 2007. 50th Midwest Symposium on. Rosas, RL, de Luca, A & Santillan, FB 2005, 'SIMD architecture for image segmentation using Sobel operators implemented in FPGA technology', paper presented at the Electrical and Electronics Engineering, 2005 2nd International Conference on. Sharifi, M, Fathy, M & Mahmoudi, MT 2002, 'A classified and comparative study of edge detection algorithms', paper presented at the Information Technology: Coding and Computing, 2002. Proceedings. International Conference on. CIS Research Method Page 29 of 30 Shen, J 1996, 'On Multi-Edge Detection', Graphical Models and Image Processing, vol. 58, no. 2, pp. 101-114. Shin, MC, Goldgof, DB, Bowyer, KW & Nikiforou, S 2001, 'Comparison of edge detection algorithms using a structure from motion task', Systems, Man, and Cybernetics, Part B: Cybernetics, IEEE Transactions on, vol. 31, no. 4, pp. 589-601. Verderber, M, Zemva, A & Trost, A 2001, 'Implementation of IDFT algorithm', paper presented at the EUROCON'2001, Trends in Communications, International Conference on. Wenhao, H & Kui, Y 2008, 'An improved Canny edge detector and its realization on FPGA', paper presented at the Intelligent Control and Automation, 2008. WCICA 2008. 7th World Congress on. Yasri, I, Hamid, NH & Yap, VV 2008, 'Performance analysis of FPGA based Sobel edge detection operator', paper presented at the Electronic Design, 2008. ICED 2008. International Conference on. Yu, Y-H & Chang, C-C 2006, 'A new edge detection approach based on image context analysis', Image and Vision Computing, vol. 24, no. 10, pp. 1090-1102. CIS Research Method Page 30 of 30