winds bridges
advertisement

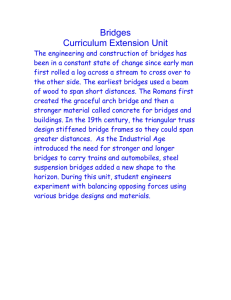
4 Chapter II LITERATURE REVIEW 2.1 Introduction This chapter gives a review and development of suspension bridge and other type of bridge. The emphasis will be on winds effects to the suspension bridges and the serviceability criteria, deflection in bridge structure. 2.2 Suspension Bridge The suspension bridge could be a class of suspension structures. The suspension bridge reigns supreme for spans in excess of 600 m. However, it is generally regarded as competitive for spans down to 300 m. The modern suspension bridge owes its development largely to work done over the last one hundred years in United States. It has been almost universally an all-steel structure, apart from the deck surface and the foundations. More recently, reinforced concrete towers have been used in a number of major structures, beginning with the bridge at Tancarville, 5 France. Nowadays, the longest suspension in the world is Akashi Kaikyo Bridge, with the length of 3911 meters, which shown in the Figure 2.1. Figure 2.1: World’s longest suspension bridge, Akashi Kaikyo Bridge. The major element of the stiffened suspension bridge is a flexible cable, shaped and supported in such a way that it can transfer the major loads to the towers and anchorages by direct tension. This cable is commonly constructed from high strength wires, either spun in-situ or formed from component, spirally formed wire ropes. In either case the allowable stresses are high for parallel strands. The deck is hung from the cable by hangers constructed of high strength wire ropes in tension. This use of high strength steel in tension, primarily in the cables and secondarily in the hangers, leads to an economical structure, particularly if the self-weight becomes significant, as in the case of long spans. The economy of the main cable must be balanced against the cost of the associated anchorages and towers. The anchorage cost may be high in areas where the foundation material is poor. The main cable is stiffed either by a pair of stiffening trusses or by a system of girders at deck level. This stiffening system serves to control aerodynamic movements and limit local angle changes in the deck. It may be unnecessary in cases, where the dead load is great. 6 The complete structure can be erected without intermediate staging from the ground. The main structure is elegant and neatly expresses its function. However, the height of the main towers can be a disadvantage in some areas, for example, within the approach circuits for an airport. 2.2.1 Other types of bridge There are many types of bridge structure in the construction. One of the famous bridges is cable-stayed bridge. The cable-stayed bridge consists of a main girder system at deck lever, supported on abutments and piers and in addition by a system of straight cables passing from the approaches over one or two towers to the main span. An arrangement in which all cables converge to a point at the tower top will be classed as a fan. In the harp arrangement, the cables are in parallel tiers. The modified fan has the cable intersections partly separately at the towers and is intermediate between the fan and the harp. This bridge type is claimed to be economical for spans in the range100 m to 350 m. The other type of bridge is arch bridge. An arch may be defined as a member shaped and supported in such a way that intermediate transverse loads are transmitted to the supports primarily by axial compressive forces in the arch. For a fixed loading, the arch shape may be chosen so as to avoid all bending moments. For downward loads, this shape will be concave downwards. The arch then becomes the exact inverse of the suspension bridge cable. The classical arch form consists of a curved rib springing from abutments, which supply reactions having the inwardacting horizontal component essential for arch action. 7 Furthermore, there are several types of bridge like steel plate girders bridge, prestressed concrete bridge, trusses bridge, turbular girders bridge and others. Every type of bridges has their different advantages and disadvantages. 2.3 Loads on Bridges Bridge structures, like buildings, must be designed to resist various kinds of loads: gravity as well as lateral. Generally, the major components of loads acting on highway bridges are dead and live loads, environmental loads (temperature, wind, and earthquake) and other loads, such as those arising from braking of vehicles and collisions. Gravity loads are caused by the deadweight of the bridge itself, the superimposed dead load, and the live load, whereas the lateral loads are caused by environmental phenomena such as wind and earthquakes. Bridge structures serve a unique purpose of carrying traffic over a given span; to this end they are subjected to loads that are not stationary (moving loads). Also, as consequence, they are subjected to loads caused by the dynamics of moving loads, such as longitudinal force and impact and centrifugal forces. In the case of bridges built over waterways, the bridge substructures (but not superstructures) may be subjected to lateral loads such as earth pressure, water pressure, stream flow pressure, or ice pressure. A comprehensive discussion on loads and forces on bridges is presented in literature [ASCE, 1981; Buckland and Sexsmith, 1981; Bakht, Cheung, and Dortan, 1982; Nowak and Hong, 1991]. ASEC [1981], with its149 references and extensive commentary, presents a comprehensive discussion of loads on bridges and is highly recommended for a thorough reading. This important paper also discusses provisions for loads on long-span bridges. 8 The two major components of the bridge design process are the design of the superstructure and the design of the substructure. With this perspective, the forces acting on bridges can generally be divided into two categories; those acting on the superstructure, and those acting on the substructure. For designing highway bridges in United States, various kinds of loads are stipulated in AASHTO 3.2.1 [AASTHO, 1992] and in United Kingdom, the loads on bridges are according to BS 5400: Part 2 Specifications for Loads: 1978. 2.3.1 Dead Loads The dead load on a bridge superstructure consists of the weight of the superstructure plus the weight of other items, such as utility pipes (gas, water, oil, etc), conduits and cables, which may be carried on the side of or underneath the deck. The self-weight of the superstructure consists of the deck (including the wearing surface), sidewalks, curbs, parapets, railings, the supporting stringers and floor beams. Depending on the type of bridge, the self-weight of the superstructure may be significant, as in the case of truss and suspension bridge, or it may be small (but not insignificant) fraction of the total weight, as in the case of short span slab or slab stringer bridges. In any case, the dead load can be easily calculated from the known or the assumed sizes of the superstructural components, such as the slab, curb, and stringers. In the case of decks consisting of reinforced concrete slab, it is common practice to pour curbs, parapets and sidewalks after the slab has hardened, in order to facilitate screeding off the slab. In such cases, AASHTO 3.23.2.3.1.1, permits equal distribution of their weight (including that of railings), commonly referred to as superimposed dead load, to all stringers supporting the deck. However, this practice is reported to be questionable. Recent research on multibeam, precast, pretopped, prestressed bridges suggest that 80 percent of the sidewalk and parapet loads are 9 taken by the exterior and only 20 percent by the interior girder, and that the asphalt wearing surface load is distributed to each beam in the ratio of its moment to the moment of inertia of all the beams [Bishara and Soegiarso, 1993]. However, a common practice is to distribute the dead load due to the self-weight of the deck (including the wearing surface) to the supporting beams on the basis of their tributary widths. An important consideration in dead load computations is to include anticipated future wearing surface, widening of the roadway for additional traffic lanes, and additional utilities it may have to carry. Because the top of the deck wears out in a few years, due to abrasion and deterioration from traffic contact, it is generally required to keep in the dead load design a provision of usually 35 lb/ft2 of the deck area (between the curbs) for the future wearing surface. This load is to be considered for all deck slabs, including decks with bituminous wearing surfaces. It is a common practice to use permanent deck forms (metal or prestressed concrete) for supporting the deck during its pour. These forms are left in place permanently even after the deck slab has hardened, and therefore constitute a part of the dead load that must be supported by stringers (or girders) or by the floor beams that support the deck. To account for the deadweight of these forms (and the concrete in the valleys of the metal deck forms when these are used), a load of usually 15 lb/ft2 of the deck area is considered additional dead load for design purposes. 2.3.2 Live Loads For live loads on bridges as specified in the AASHTO Standard Specifications [AASTHO, 1992]. Railing loading depends on the purpose for which the railing is provided (vehicular, bicycle, or pedestrian railing), the geometry of the railing, and the type of parapet provided on the deck. Requirements for designing 10 various combinations of railing and parapets are rather extensive and are covered by AASTHO 2.7. 2.3.3 Wind Loads Wind loads form a major component of lateral loads that act on all structure. In general, they are a component of the so-called environmental loads to which all structures are subjected. It is often mistakenly believed that wind load considerations are important only for long span bridges. Statistics, however, show that bridges with spans as short as 260 ft and as long as 2800 ft have vibrated to destruction [Buckland and Wardlow, 1972; Liepman, 1952; Scanlan, 1979, 1988, 1989; Wardlow, 1970]. Bridges are frequently built on exposed sites and are subject to severe wind conditions. Wind loads on bridge superstructures depend on the type of bridge, such as slab-stringer, truss, arch, cable-stayed, or suspension. Other parameters that affect wind loads on bridge superstructures are the wind velocity, angle of attack, the size and shape of the bridge, the terrain, and the gust characteristics. General discussions on wind loads and their effects on structures have been presented by several researchers [ASCE, 1961, 1987; Houghton and Carruthers, 1976; Ishizaki and Chiu, 1976; Liu, 1991; Sachs, 1978; Scanlan, 1978a,b; Simui and Scanlan, 1986]. Wind effects on bridge structures may be threefold: 1) Static wind pressures 2) Dynamic (oscillatory) wind movements 3) Buffeting between adjacent structures 11 A distinction should be made between the static effects of wind, as used in designing ordinary buildings and bridges, and the dynamic effects of wind on flexible structures, such as suspension and cable stayed bridges, an aerodynamic problem [Steinman, 1941, 1945a]. The July 29, 1944, failure of the two span, continuous truss bridge over the Mississippi River at Chester, Illinois, it was blown off its piers by wind [Steinman, 1945a], is an example of the aerostatic effects of wind. On the other hand, the November 7, 1940, failure of the Tacoma Narrows Bridge at Puget sound [EAR, 1941] was an aerodynamic phenomenon. Aerodynamic instability means “the effect of a steady wind, acting on a flexible structure of conventional cross section, to produce a fluctuating force automatically synchronizing in timing and direction with the harmonic motions of those of the structure so as to cause a progressive amplification of these motions to dangerous destructive amplitudes” [Steinman, 1945b]. A significant force that is caused by an aerodynamic phenomenon is the wind uplift, or the vertical component of wind, known in aeronautics as lift. This force is not considered in an aerostatic problem. For example, on the morning of the Tacoma Narrows Bridge failure, the 35 – 42 mph gale blowing at the time amounted to a force of only about 5 lb/ft2 on the vertical plane. The bridge had been designed for a horizontal wind pressure of 50 lb/ft2 on the vertical plane and was structurally safe for a wind load of that magnitude. The bridge was destroyed, however, by the cumulative dynamic effects of vertical components produced by a horizontal wind pressure of only 5 lb/ft2 [Steinman, 1941, 1954]. Static wind pressures are those that cause a bridge to deflect of deform. Dynamic wind movements affect long span flexible bridges, such as suspension bridges and cable stayed bridges. Such bridges are very prone to movements under wind forces, which may caused them to oscillate in a number of different modes, at low frequencies, which may be catastrophic under suitable wind conditions [Davenport, 1962a,b, 1966; Lin, 1979; Scanlan, 1978a,b, 1981, 1986; Scanlan and Wardlos, 1977]. Buffeting is caused by the close proximity of the two bridge structures. In such a case, the turbulent eddy formations from the windward bridge will excite the leeward bridge. 12 Buffeting is defined as the randomly forced vibration of a structure due to velocity fluctuations (i.e., unsteady loading) in the oncoming wind. It is characterized as a pure forced vibration, where the forcing function is totally independent of the structure motion [ASCE, 1987, Ch. 9]. In reference to bridges, the problem of buffeting is one associated with linelike structures, such as slender towers and decks of suspended span bridges that exhibit aeroelastic effects. Analysis for buffeting forces has been discussed by Simui and Scanlan [1986]. Static wind force, the main wind force acting on a bridge structure, develops as a result of a steady wind that exerts a fairly constant pressure in the general direction of the wind. Pressure due to wind is calculated by applying the familiar principles of fluid mechanics. According to Bernoulli’s theorem, when an ideal fluid strikes an object, the increase in the static pressure equals the decrease in the dynamic pressure. The intensity of this pressure is expressed by equation: P = ½ CV2 (2.1) where p = wind pressure = the mass density of air V = wind velocity in feet per second C = a coefficient of proportionality, called the shape factor, which depends on the shape of the obstruction The value of coefficient C is smaller for the narrow members and streamlined surfaces and larger for the wide members and blunt surfaces. The resultant of the steady wind force acts not exactly in the direction of the wind, but is deflected by a force component acting at right angles to the direction to the wind. In aerodynamics, this force is called the lift; the component in the direction of wind is called the drag. The lift (FL) and drag (FD) on an arbitrary bluff body are shown in Figure 2.2. 13 FL FD Figure 2.2: Lift and drag on an arbitrary bluff body. 2.4 Nature of wind Wind is the term used for air in motion and is usually applied to the natural horizontal motion of the atmosphere. Motion in a vertical or near vertical direction is called a current. Winds are produced by differences in atmospheric pressure, which are primarily attributable to differences in temperature. These temperature differences are caused largely by unequal distribution of heat from the sun, and the difference in the thermal properties of land and ocean surfaces. When temperatures of adjacent regions become unequal, the warmer and thus lighter air tends to rise and flow over the colder, heavier air. Winds initiated in this way are modified by rotation of the earth. Movement of air near the surface of the earth is three-dimensional, with a horizontal motion much greater than the vertical motion. Motion of air is created by solar radiation, which generates pressure differences in air masses. Vertical air motion is of importance in meteorology but is of less importance near the ground surface. The surface boundary layer involving horizontal motion of wind extends 14 upward to a certain height above which the horizontal airflow is no longer influenced by the ground effect. The wind speed at this height is called the gradient wind speed and generally occurs at an altitude greater than 458 m. In this boundary layer is precisely where most of the human activity is conducted, and therefore how the wind effects are felt within this zone is of great concern in engineering. Although one cannot see the wind, it is a common observation its flow is quite complex and turbulent in nature. The sudden variation in wind speed is called gustiness or turbulence. The up-and-down fluctuations of speed about the mean velocity that occur over long periods of time due to solar energy cycles are of little importance in engineering, but the shorter-period peaks resulting from surfacegenerated turbulence are of great importance for the human activity in the earth’s boundary layer. The Figure 2.3 shows the moving surface air produces six belts of winds around the earth. Figure 2.3: Circulation of world’s wind. 15 2.4.1 Types of Wind Of the several types of wind that encompass the earth’s surface, winds that are of interest in the design of structures can be classified into three major types: the prevailing winds, seasonal winds and local winds. The prevailing winds are the surface air moving from the horse latitudes toward the low-pressure equatorial belt constitutes the prevailing winds of trade winds. In the northern hemisphere, the northerly wind blowing toward the equator is deflected by the rotation of the earth to become northeasterly and is known as the northeast trade wind. The corresponding wind in the southern hemisphere is called the southeast trade wind. On the polar regions of the horse latitudes, the atmospheric pressure diminishes and winds moving toward the poles are deflected by the earth’s rotation toward the east. Because winds are known by the direction from which they blow, these winds are known as the prevailing westerlies. The winds from the poles, particularly in the southern hemisphere, are deflected to become the polar easterlies. In comparison to the westerlies, the trade winds and the polar easterlies are shallow, and above a few thousand feet they are generally replaced by westerlies. The second types of wind are the seasonal winds. The air over the land is warmer in summer and colder in winter than the air adjacent to oceans during the same seasons. During summer, the continents thus become seats of low pressure, with wind blowing in from the colder oceans. In the winter, the continents are seats of high pressure with winds directed toward the warmer oceans. These seasonal winds are typified by the monsoons of the China Sea and Indian Ocean. 16 Another type of wind is the local winds. Corresponding with the seasonal variation in temperature and pressure over land and water, daily changes occur which have a similar but local effect, penetrating to a distance of about 48 km on and off the shores. Similar daily changes in temperature occur over irregular terrain and cause mountain and valley breezes. Other winds associated with local phenomena include whirlwinds and winds associated with thunderstorms. All three types of wind are of equal importance in design. However, for purposes of evaluating wind loads, the characteristics of the prevailing and seasonal winds are analytically studied together, while those of local winds are studied separately. This grouping is for analytical convenience and to distinguish between the widely differing scale of fluctuations of the winds; prevailing and seasonal wind speeds fluctuate over a period of several months, whereas the local winds vary almost every minute. The variations in the speed f prevailing and seasonal winds are referred to as fluctuations in mean velocity. The variations in the local winds, which are of a smaller character, are referred to as gusts. Flow of wind, unlike that of other fluids, is not steady and fluctuates in a random fashion. Because of this, the properties of wind are studied statistically. The roughness of the earth’s surface creates frictional drag in the flow of air, causing a gradual decrease in its velocity near the earth’s surface. Also, turbulence is caused by surface roughness. 17 2.4.2 Characteristics of Winds Wind is a phenomenon of great complexity because of the many flow situations arising from the interaction of wind with structures. 2.4.2.1 Variation of Wind Speed with Height and Terrain Roughness Characteristically, the velocity of wind increases from zero at ground surface to a certain maximum at a height of approximately 0.5 to 1.0 kilometer above the ground. The surface of the earth exerts on the moving air a horizontal drag force, the effect of which is to retard wind flow. This effect decreases with the increase in height and become negligible above a height , called the boundary layer of the atmosphere. The atmosphere above the boundary layer is called the free atmosphere. The height at which this takes place is called the gradient height, and the wind velocity at that height is called the gradient velocity, which does not vary with height [Houghton and Carruthers, 1976; Liu, 1991; Simui and Scanlan, 1986]. Generally, the local mean wind velocity, used as the reference wind velocity, is the surface wind speed measured not at the ground surface, but by the anemometers mounted usually at a height of 10 m. General variation in wind velocity with height above ground is shown in figure [Liu, 1991]. Figure2.4 and Figure 2.5 show profiled of wind velocity over level terrains of differing roughness. 18 Figure 2.4: Variation in wind velocity with height above ground [Liu, 1991]. Figure 2.5: Profiles of mean wind velocity over level terrains of differing roughness [Davenport, 1963]. The wind speed profile within the atmospheric boundary level can be expressed by mathematical relationships based on fundamental equations of continuum mechanics. Historically, the first representation of the mean wind profile in horizontally homogenous terrain was proposed in 1916 [Hellman, 1916] is called the power law, which is expressed as [Liu, 1991] 19 z V(z) = V1 z1 (2.2) where V(z) = wind velocity at height z above ground V1 = wind velocity at any reference height z1 above ground, usually 10 meters = power law exponent that depends on the terrain characteristics Another relationship used to approximate the wind profile is the logarithmic law, expressed as [Liu, 1991] V(z) = 1 z V* ln k z1 (2.3) where V* = shear velocity or friction velocity = 0 , where 0 = stress of wind at ground level and = air density = 1.2256 kg/m3 at sea level and 15C k = von Karman constant = 0.4 approximately, based on experiments in wind tunnels and in the atmosphere. Currently, the logarithmic law is regarded by meteorologists as the more accurate representation of wind profile in the lower atmosphere; consequently, the power law is not used in meteorological practice. However, because of its simplicity in used for wind pressure calculations, the power law formula, rather than the logarithmic law, is used in building codes, such as ASCE 7-88 (formerly ANSI 58.1) [Houghton and Carruthers, 1976; Simui and Scanlan, 1986]. A discussion on the applications of the power law formula for building structures has been presented by Metha, Marshall, and Perry [1991]. When a structure is not very high relative to the surrounding terrain, it is satisfactory to use the surface wind speed as the reference wind speed for 20 engineering application [Liu, 1991]. This is true for most bridges built in rural areas whose elevations are not too high compared with the terrain in the vicinity. There are situations, however, where portions of bridges, such as towers of cable stayed and suspension bridges, are rather tall and extend to relatively higher elevations. In such cases, the surface wind velocity alone cannot be used as the governing wind velocity for the design of the entire bridge. The increase in wind velocity with height may become an important design consideration – the elevated portions of the bridge will need to be designed for higher wind speeds than those used for the lower portions of the bridge. For example, for the Fred Hartman cable stayed bridge, commonly referred to as the Baytown Bridge over the Houston ship channel, near Baytown, Texas, the 100 year design wind speed was calculated as 110 mph at 30 ft elevation, 160 mph at deck elevation (176 ft above the water level in the channel), and 195 mph at the tower tops (266 ft above the deck level). To these wind speed, a 15 percent additional gust load factor was applied for towers and piers [Lovett and Warren, 1992]. 2.5 Oscillations of Suspension Bridges under Lateral Winds Until recent decades, whilst the tendency of suspension bridges to oscillate under high lateral winds was known to designers, little provision for wind action was made beyond that necessary to withstand the static lateral forces that may arise. With the spectacular collapse of the Tacoma Bridge in U.S.A. in 1940, however, the aerodynamic resources and research methods of aeronautics have been brought to bear on the subject and have produced a succession of valuable contribution to its understanding. Of these the most extensive are the model investigations of F.B. Farquharson in the U.S.A. and of R.A. Frazer and C. Scruton in England, and the theoretical work of F. Bleich. A more recent publication of the U.S.A. Department of Commerse gives an excellent review of the mathematical theory of suspension bridge vibrations. D.B. Steinman in 1943, published a valuable summary of relevant vibration data from the practical design standpoint. 21 2.5.1 Static Actions In the static effects of a steady lateral wind, an isolated uniform suspension cable would be subject. Under such conditions, to the combined action of uniformly distributed gravity loading in a vertical plane and uniformly distributed wind loading acting horizontally. The overall effect would be to swing the whole cable so that it hung not in a vertical planed but in a plane inclined to the vertical in such a way as to contain the resultant force on every element of the cable length. In the case of complete suspension bridges, however, the greatest wind forces commonly arise on the bridge deck, which tends to resist them, on its own account, as a beam bending in a horizontal plane. The wind bracing in the plane of the deck is provided to resist the shear forces thus arising and the stiffening girders at each side of the deck act in part as the booms or flange members of this beam. To enable the deck structure to resist wind forces in this fashion, the deck is usually specially supported against horizontal movement at each end (at each tower in the case of a multi-span bridge). The deck beam, however, is usually very flexible against lateral wind forces, and its lateral displacement at the span centre is large enough to involve, due to the presence of the inextensible cables above, a lifting of the deck at its centre. Thus, in a complete bridge the wind forces are resisted partly by the elastic flexure of the deck structure in a horizontal plane and partly by gravity action induced by the cables. For the case of a single span, the lateral deflection of the deck there due to a net lateral loading p’ will be 5 p' L4 p' L4 0.013 384 EI EI ' (2.4) where EI refers to the flexural stiffness of the whole deck for bending in the lateral plane. 22 Here p’ will be less than the total wind loading p per unit span because of the gravity resistance resulting from the swing of the total gravity loading w acting approximately at deck level, a depth D below the tower tops. On this account, the gravity resistance p – p’ will be equal to w. ( /D). Hence, from equation (4), wL4 p p' r DEI p p wL4 1 0.013 DEI 0.013 (2.5) Steinman points out that p’ will approximate to p at the ends of the span and so recommends for the design of the deck an average effective horizontal loading at deck level of p” = p – 5/6 r (2.6) In his book, he gives examples showing that p” may be some 10 or 20 percent less than p. Subsequently, Moisseiff and Lienhard studied this lateral problem in more detail, through agreeing with the value of the above approximate treatment. More recently, Arne Selberg has investigated the same problem more deeply. By expressing the gravity resistance p – p’, or p – p”, in terms of a Fourier series, he shows how a variety of suspension bridge arrangements can be solved for the static wind loading case. 23 2.5.2 General Natural of Oscillations The oscillation problems of suspension bridges are more concern in the bridge analysis. That such bridges sometimes suffer serious damage due to oscillations in high winds has been a matter of common knowledge from early times, and technical records of bridge failures, starting with that of footbridge of 80 m span over the Tweed at Dryburgh in 1817, are numerous in the nineteenth century. Nevertheless, it was not until such troubles reached a climax in 1940 with the dramatic collapse of the 850 m span bridge at Tacoma Narrows in a wind of only some 65 km per hour that much serious scientific attention was devoted to the problem. It is first necessary to distinguish between three types of oscillatory motion 1) Purely flexural oscillations of the bridge, with each cross-section of the bridge deck moving up and down in a vertical plane, every point in it having the same amplitude of motion. 2) Purely torsional oscillations of the bridge, with each cross-section of the bridge deck oscillating angularly in its own plane about an axis at or close to the mid-line along the roadway. 3) Coupled flexural-torsional oscillations of the bridge, with each cross-section of the bridge deck undergoing in general both vertical and angular motions. In gusty weather, a lateral swinging of the whole bridge deck about the tower tops will sometimes arise, but in modern long span bridges this form of oscillation is of small amplitude and short lived. All three types of oscillation listed above are liable to occur only under a lateral wind having its main component at right angles to the vertical plane of symmetry of the bridge, and the effects of such a wind are usually somewhat 24 aggravated if the wind, instead of acting horizontally, has a slight upward inclination. Oscillations of type 1 are common among suspension bridges built in the nineteenth century, but are usually of harmless amplitude. Oscillations of type 3 are rare, but may be dangerous. Oscillations of type 2 are not so common as type 1, but when present may build up to dangerous amplitudes, as in the case of the Tacoma Narrows Bridge. In order to understand the nature and origin of these various oscillations, it is desirable first to consider the air forces on a bridge deck under a lateral wind. In the simplest possible case we may regard a deck as simply a flat plate or ribbon of metal running along the bridge span, and consider the action of a lateral air stream upon a section of its length. Provided the wind is in a nearly horizontal plane, the bridge deck section will in such a case act like a simple thin aerofoil. The flow across the deck will be of a smooth stream line character, as shown in Figure 2.6, and the deck will experience a lateral drag force together with a small vertical lift force, both varying linearly with the inclination of the wind to the plane of deck. These forces will be steady for a given wind speed and any small flexural or torsional oscillation given to the deck will normally be found to die out due to positive damping arising from the air forces as modified by the motion and from the natural positive damping in the bridge structure, due mainly to friction. The only possible sources of unstable oscillations in this case would be the effects of a coupled oscillations of type 3 or due to the development of unsteady flow, with possible negative aerodynamic damping, if the wind inclination to the horizontal became large enough for the streamline from of Figure 2.6 to break down and stall as in Figure 2.7. In such a case large eddies would be shed somewhat irregularly from the aerofoil or deck and cause the air forces on the deck to fluctuate; for the simple flat plate deck, however, the necessary wind inclination or “incidence” would be about 10 and unlikely to occur for any length of time in nature. 25 Figure 2.6: The wind flows across the deck. Figure 2.7: The deck breaks down and stalls. Much more important in practice are the effects of the stiffening girders at the sides of the deck. If these are plate girders, as was common in the nineteenth century, with continuous webs, they present a uniform bluff obstacle to any lateral wind and induce eddying flow at all speeds. This is very clear from the flow picture of Figure 2.8, which illustrates the effects of a single long flat plate normal to the wind. In this case large eddies of rollers leave the top and bottom edges of the plate alternately, and so produce regular periodic pulsations in the air forces on the plate. Figure 2.9 illustrates the flow past a model suspension bridge deck with plate girders at its sides, and the possibility of fluctuating forces on the deck itself as well as on the side girders is at once evident. Now the eddy frequency in the idealized case of Figure 2.8 is found to vary linearly with the wind speed, V and inversely as the depth D of the obstacle, and is given approximately by the formula f = 0.2 V/D (2.7) There is at once a possibility of resonance between this eddy frequency, f and some natural frequency, n in either flexure or torsion, of the bridge itself. Moreover, from the eddying nature of the air flow it is possible that, as in the stalled case of 26 figure, the aerodynamic damping, particularly of the torsional motion, will be negative and so offset any natural positive damping, due to friction, in the structure. Figure 2.8: Effects of a single long flat plate normal to the wind. Figure 2.9: The flow past a model suspension bridge deck with plate girder at its side. There are here the elements of an explanation, though over-simplified, of oscillations of types 1 and 2. At a critical wind speed Vc the frequencies f and n would, from equation (2.7) match, when Vc = 5nD (2.8) It is clear that in practice both the depth of girder D and the width of deck B must influence the eddy formation, its regularity and its effects; and since for many bridges the ration B/D will not vary much, it has become customary to express the critical wind speed Vc in terms of B, thus, 27 Vc = knB (2.9) And to examined full scale and model evidence in terms of a non-dimensional reduced velocity Vr = V / nB (2.10) This reduced velocity is a mode of presentation common in the flutter work of aeronautics, though not perhaps quite so directly relevant there, and has become usual in this bridge application through the work of Bleich and Frazer. Equation also has a direct aeronautical parallel. In the early flutter investigations of the decade before the last war, it was common to use for the critical flutter speed an approsimate formula like attributed to Kussner, and the same formula, in reduced frequency form, has been advocated recently for preliminary design work, by Broadbent. The constant k is, of course, regarded as a parameter to be varied with other influential factors, such as, in the bridge case, the ratio B/D. 2.5.3 Flexural Oscillations As the lateral wind increases in speed, the magnitude and frequency of the fluctuating air forces on the deck will increase, and the bridge deck will gradually start to oscillate in flexure at its lowest natural frequency. If the eddies shed by the windward girder are regular enough, the amplitude of the oscillations will tend to become greatest when resonance occurs, but in general the limit of amplitude at a given wind speed will be set by the natural aerodynamic and structural damping present. There is here no inherent instability in the oscillation. At higher wind speeds, the mode and frequency of oscillation may change to a higher natural 28 frequency in flexure, such as n2 or n3, but in such cases the structural damping will tend to become more restrictive of the stable amplitude. Experiments on small scale models of short lengths of bridge decks, suitable sprung to give vertical motion, and on complete bridge models, show that the amplitude of these flexural oscillations is a function of D/B. It is only when D/B is large that the amplitudes reached are likely to be catastrophic. This increase of danger with D/B is, of course, consistent with out rough notions based on the eddies shed by the windward girder. To prevent these flexural oscillations, one method is to minimize them by adopting deck designs with D/B small, but a much more effective way is to reduce the scale of the eddies not by reducing D but by abandoning a plate girder in favour of a lattice or other open web truss. The scale of the eddies in such a case is set by the width of the individual bracing members instead of by the overall depth of the girder, and model tests have shown that the flow over the bridge deck then becomes so irregular and broken up that no flexural oscillations occur. This reveals a priciple to be adopted more generally; footpath handrail girders should be truss-like, gaps can be put in the deck between adjacent traffic lines, and so on, all with the idea of breaking up the flow and minimizing its effect on the deck as a whole. 2.5.4 Torsional Oscillations For solid decks with plate girders at the sides, however, torsional oscillations do not start and just grow with the wind velocity. The behaviour is more sensitive to wind speed and incidence, and to the ratio D/B, and oscillations tend to start at some critical wind speed Vc in fundamental torsional mode nT. 29 With truss type stiffening girders flexural oscillations of type 1 are very unlikely, research effort on the aerodynamics of suspension bridges has largely been concentrated on the behaviour in torsion of decks with truss type girders. This is most conveniently done by model experiments in wind tunnels, using sectional models arranged so that the deck is broadside on to the air stream and given freedom to pitch aabout a longitudinal axis on the model centre line at a known frequency governed by suitable springs. It is found that the torsional or pitching stability of such models is not very sensitive to the level of the pitching axis relative to the roadway, but normally improves somewhat for axes above or below the deck level. In the absence, therefore, of precise knowledge of the natural axis of rotation, tests are best made with the axis on the road level so as to ensure safe results. An interesting series of tests of this type on deck arrangements contemplated for the proposed Severn Bridge have bee described by Scruton, and his paper indicates the qualitative effects of a variety of possible design variations. In particular, the marked stabilizing effects of longitudinal gaps in the roadway between traffic lanes may be noted; such an arrangement seems likely, with the use of truss girders, to be most general design feature adopted in practice for the prevention of unstable torsional oscillations. The aim in the model work is in each case to determine an appropriate geometrical deck shape such that under lateral winds of all practicable speeds the deck section is stable for torsional oscillations about a longitudinal axis near the road level at its centre line. In other words, if the deck is caused by any extraneous forces to start to oscillate in torsion at its natural frequency, such oscillations will be damped and die away instead of grow, whatever the wind speed. 2.5.5 Coupled Oscillations These are oscillations of the type referred to as flutter in the classical aeroelasticity work of aeronautics. Flutter of this kind arises essentially from the coupling, or interdependence, of two or more degrees of freedom and in the case of a bridge deck would involve motion of both the vertical or flexural type 1 and the 30 torsional type 2. It is usual, and indeed normally mathematically only practicable, to discuss such coupled oscillations in terms of linear equations for small amplitude movements. 2.6 Serviceability Criteria: Deflection Limiting the deflection to span and the depth to span ratios had been recognized early on by both railroad and highway bridge engineers as the key to providing bridges with durable riding surfaces as well as comfort to the occupants of moving vehicles. However, how these criteria contribute to those qualities has not been very clear [Wright and Walker, 1971]. Both the deflection to span and the depth to span ration limitations have evolved over more than 100 years. During the early years, because of the widespread use for railroads and the much heavier loadings involved, railroad engineers took the lead in establishing the two limitations. In the United States the evolution of the deflection limitations can be traced back to the 1870s. According to a landmark study [ASCE, 1958] on the deflection limitations of bridges, the first serious effort in this regard appears to be that of the Phoenix Bridge Company, which, in 1871, limited the deflection due to the passage for a train and locomotive at 30 miles per hour to 1/1200 of the span. The limiting depth to span ratios was modified from time to time as shown in Table 2.1 [ASCE, 1958]. In 1905, the AREA specifications provided that “pony trusses and plate girders shall preferably have a depth not less than 1/10 of the span and the rolled beams and channles used as girders shall preferably have depth not less than 1/12 of the span. When these ratios are decreased, proper increases shall be made to the flange section.” 31 Table 2.1: The limiting depth to span ratios for railroads from time to time [ASCE, 1958]. Year Trusses Plate Girders Rolled Beams 1913, 1924 1:10 1:10 1:12 1907, 1911, 1915 1:10 1:12 1:12 1919, 1921, 1953 1:10 1:12 1:15 Early highway bridge specifications followed the railroad’s lead regarding the depth to span ration limitations, with minor modifications; not until the 1930s were specific limitations developed for the distinctive problem of highway bridge design. The U.S Department of Agriculture Circular no. 100, issued in 1913 by the Bureau of Public Roads, set limiting depth to span rations at 1:10, 1:12, and 1:20 for trusses, plate girders, and rolled beams, respectively. The same limitation was contained in the U.S. Department of Agriculture Bulletin no. 1959, issued in October 1924 (AASHTO specifications). Over the years, these requirements were modified as shown in Table 2.2 [ASCE, 1958]. Table 2.2: The limiting depth to span ratios for highway bridge over the years [ASCE, 1958]. Year Trusses Plate Girders Rolled Beams 1913, 1924 1:10 1:10 1:20 1931 1:10 1:15 1:20 1935, 1941, 1949, 1953 1:10 1:25 1:25 These limitations were quite possibly set and modified arbitrarily, because no record exists as to any bases for a particular value for them. In fact, in 1905 the AREA Committee explained the somewhat ambiguous wording of their provisions for design, which reduced depths, as follows [ASCE, 1958]: 32 “We established the rule because we could not agree on any. Some of us in designing a girder that is very shallow in proportion to its length, decrease the unit stress or increase the section according to some rule, which we guess at. We put it there so that a man would have a warrant for using whatever he pleased.” The ASCE Committee [ASCE 1958] concluded that “Neither the reasons for these changes nor the original basis for the limitation on depth-span ratios have been determined by the Committee.” 2.6.1 Purpose of Deflection Limitations Deflection limitations for highway bridges appear to have evolved in the early 1930s, when reports of objectionable vibrations of steel girder highway bridges began to appear. The Bureau of Public Roads made a statistical study to correlate the reported vibrations with the properties of the bridges involved. According to this study, the bridges for which objectionable vibrations were reported usually had computed live load deflections of more than 1/800 of the span for simple and continuous spans and more than 1/400 of the span for cantilever spans. Accordingly, in the design specifications issued by the Bureau of Public Roads in November 1936, the allowable deflection due to live load plus impact were limited to 1/800 of the span for bridges carrying light traffic and to 1/1100 for bridges in or adjacent to populous centres and for bridges carrying heavy traffic. In 1939 the specifications was extended to limit the deflection for cantilever arms to 1/300 of the arm except at locations of dense traffic, where the limit was kept to 1/400 of the arm. These specifications were adopted in the meetings of the AASHO (now AASHTO) Committee in 1938. With minor modifications, nearly the same limitations continue to be used today. 33 While suggesting that its goal might have been to reduce human discomfort by limiting large deflections, the ASCE Committee [ASCE, 1958] pointed out two reasons for limiting deflections for railroad bridges: 1) To avoid excessive vibration of the structure in resonance with the recurring hammer blows of the locomotive driving wheels. 2) To avoid objectionable oscillation of the rolling stock induced when the deflection of the successive spans tended to set up a harmonic excitation of the sprung weight. The ASCE Committee [ASCE, 1958] also gave the following reasons for limiting deflection for highway bridges: 1) To avoid undesirable structural effects, including a) Excessive deformation stresses in secondary members or connections resulting either from the deflection itself or from induced rotations at joints or supports. b) Excessive dynamic stresses of the type considered in design by the use of conventional “impact” factors. c) Fatigue effects resulting from excessive vibration. 2) To avoid undesirable psychological reaction by a) Pedestrians, whose reactions are clearly a consequence of the motion of the bridge alone. b) Passengers in vehicles, whose reactions are affected as a result of the motion of the vehicle in combination with the bridge, or by the motion of the bridge when the vehicle is at rest on the span. 34 However, the 1958 Committee [ASCE, 1958] noted several shortcomings in the stated approaches by pointing out the following: “The limited survey conducted by the Committee revealed no evidence of serious structural damage that could be attributed to excessive deflection. The few examples of damaged stringer connections or cracked concrete floors could probably be corrected more effectively by changes in design than by more restrictive limitations on deflections. On the other hand, both the historical study and the results from the survey indicate clearly that unfavourable psychological reaction to bridge deflection or vibration is probably the most important source of concern regarding the flexibility of bridges. However, those characteristics of bridge vibration, which are considered objectionable by pedestrians or passengers in vehicles are yet to be defined.” Extensive research has been conducted on human response to motion [Pain and Uptone, 1942; Reiher and Meister, 1946; Janeway, 1948; Goldman, 1948; Oehler, 1957; Dieckmann, 1958; Walley, 1959; Wright and Green, 1959a,b, 1963; Guignard and Irving, 1960; Lenzen, 1966; Leonard, 1966; Peterson, 1972; Allen and Rainer, 1976; Mathews, Montgomery, and Murray, 1982; Murray, 1981, 1991; Pernica and Allen, 1982; Bachmann, 1984, 1992; Allen, Rainer, and Pernica, 1987; Bachmann and Ammann, 1987; Baumann and Bachmann, 1987; Vogt and Bachmann, 1987; Ohlson, 1988; Rainer, Pernica, and Allen, 1988; ISO, 1989, 1992; Wyatt, 1989; Allen and Murray, 1993]. These studies show that human reaction to vibrations is a complicated phenomenon that is not completely understood. The psychological effects derive from the fact that the human body is a dynamic system, which has natural frequencies of its own, as shown by Dieckmann [1958] and by Guignard and Irving [1960]. It acts as an extremely sensitive pickup device that is able to detect very small levels of vibration. This extremely sensitive pickup device that is able to detect very small levels of vibration. This extreme sensitivity tends to exaggerate personal reactions, making individual assessments of intensity unreliable [Leonard, 1966]. Nevertheless, it is now generally agreed that the primary factor affecting human sensitivity is acceleration, rather than deflection, velocity, or the rate 35 of change of acceleration of bridge structures. Thus, there are as yet no simple, definitive guidelines for the limits of tolerable static deflection or dynamic motion. Among current specifications the Ontario Highway Bridge Design Code [OHBDC, 1983] contains the most comprehensive provisions regarding vibrations tolerable to humans [AASHTO, 1994]. In summarising the purposes of limiting deflections for highway bridges, the ASCE Committee noted that “…it should first be noted that the safety of structure is not involved, even to the extent that more flexible bridges may be adequate to carry the live load with safety” [ASCE, 1958]. This line of thought is echoed in Commentary C2.5.6.1 in the AASHTO-LRFD specifications [AASHTO, 1994]: “service load deformations may cause deterioration of wearing surfaces and local cracking in concrete slabs and in metal bridges, which could impair serviceability and durability, even if self limiting and not a potential source of collapse.” Accordingly, the deflection limitations constitute a serviceability criterion, not a strength criterion. It is pertinent to note the trend in bridge design during the period in which deflection-to-span and depth-to-span requirements evolved as just described. When the first limitations were proposed, the standard floor was plank; the supporting members were either simple beams, pony trusses, or pin-connected through trusses; and questions concerning the effects of vibration centreed on individual members. These questions were largely eliminated with the advent of more substantial members, riveted and bolted joints, and welded and composite construction. However, vibrations of the bridge as a whole were noted with some concern at about the time unit stresses were increased, and cantilever and continuous construction began to appear. Along with changes in the bridge design practices, there were also changes in the design highway live loads from time to time. At the turn of the century the 36 heaviest loading was a road roller. With the development of motor trucks, design loadings were first based on 10-ton and 15-ton trucks. This was followed by introduction of 20-ton trucks in 1924 for bridges on which heavy traffic was anticipated during their service life. Three years later, the Conference Committee representing AASTHO and AREA introduced the truck train – a heavy truck preceded and followed by trucks having three-fourths of its weight – which appeared in the 1927 Specification for Steel Highway Bridges. This way superseded in 1941 by the equivalent lane loading, which was first used as an optional loading in the 1931 AASHTO bridge specifications. Finally, the H20-S16 (now designated as HS20-44) was introduced in the 1941 AASHTO specifications [ASCE, 1958]. It should be noted that deflection-to-span and depth-to-span (slenderness) rations are not independent but are related by the following expression [Wright and Walker, 1971]: L K L d (2.11) where = deflection = flexural stress producing deflection L = span d = member depth K = a factor depending on the distribution of loading. A discussion on the values of K has been presented by Bressler, Lin and Scalzi [1968]; Wright and Walker [1971] have discussed the interrelationships between the two parameters /L and d/L. 37 2.6.2 Deflection Requirements Although deflections are caused by both dead and live loads, the deflection limitations have historically always been linked to live loads. Note that the deflection criteria in the AASHTO specifications for bridges other than orthotropic bridges are optional [AASHTO, 1994, 2.5.2.6.2]. Calculated deflections of structures have often been found to be difficult to verify in the field, because many sources of stiffness are not accounted for in calculations. For both steel and reinforced concrete bridges, AASHTO 8.9.3 (for reinforce concrete beams) and 10.6 (for steel stringers/girders) limit the deflections resulting from live load plus impact, as shown in Table 2.3. Table 2.3: AASHTO specified limitations on deflection due to live load plus impact [AASHTO, 1992]. Conditions Limitation Member having simple or continuous spans. L/800 For urban-area bridges, used in part by pedestrians. L/1000 Deflection of cantilever arms due to service load plus impact (no pedestrians). Same as above but with pedestrian. L/300 L/375 The effect of impact in to contribute the dynamic part of the deflection, caused by the suddenness and bouncing effect of the moving load. Historically, it is interesting to note that until the middle of the 19th century there was no agreement among engineers on the effects of a moving load (i.e. dynamical action) on a beam. The first experiments to determine deflections caused by impact were reportedly conducted for railroad bridges in England and Germany in the 1840s and 1850s. A summary of these tests has been provided by Timoshenko [1953, pp. 173 – 178].