MILESv1.0_update
advertisement

Page : 1/108
February 15, 2006
COSTING STUDY
FOR
MILES
(MultI-object Laser-Enhanced Spectroscopy)
A new concept for wide-field UV/optical spectroscopy
for the TMT project.
Keith Taylor, Anna Moore,
Rich Dekany, Matthew Britton
(Caltech)
Chris Clemens
(UNC)
&
Damien Jones
(Prime Optics, Qld, Australia)
February 2006
Page : 2/108
February 15, 2006
TABLE OF CONTENTS
Page
1.
EXECUTIVE SUMMARY
8
1.1
Acronyms and Abbreviations ............................................................................................................. 9
1.2
List of Symbols and Units ................................................................................................................ 10
2.
THE MILES CONCEPT
11
2.1
Introduction ...................................................................................................................................... 11
2.1.1
Compliance with the Science Requirements: ............................................................................. 11
2.1.2
Telescope compatibility ............................................................................................................... 12
2.2
Concept overview ............................................................................................................................ 12
2.3
The 3MfR Focal Reducer................................................................................................................. 15
2.3.1
Optical Performance.................................................................................................................... 15
2.3.2
3MfR Reflection Losses .............................................................................................................. 15
2.3.3
The GLAO Capability .................................................................................................................. 15
2.3.4
Multi-slit assembly ....................................................................................................................... 17
2.3.5
Other benefits of the active GLAO mirror.................................................................................... 17
2.3.6
3MfR Baffling ............................................................................................................................... 17
2.3.7
Calibration Sources ..................................................................................................................... 18
2.3.8
3MfR Output Focal Surface:........................................................................................................ 18
2.4
The spectrograph ............................................................................................................................. 18
2.4.1
Collimator..................................................................................................................................... 18
2.4.2
Dispersive Elements.................................................................................................................... 18
2.4.3
Camera ........................................................................................................................................ 20
2.5
The atmospheric Dispersion Corrector (ADC) ................................................................................ 21
2.6
Throughput ....................................................................................................................................... 22
2.7
Instrument Layout, Size and Weight:............................................................................................... 23
2.7.1
Weight/Space budget .................................................................................................................. 25
2.8
Conclusions:..................................................................................................................................... 26
3.
RESPONSE TO REVIEW PANEL (APRIL, 2005)
27
3.1
Curved CCDs ................................................................................................................................... 27
3.2
Availability of Large CaF2................................................................................................................. 27
3.3
PSF Variability of SLGLAO .............................................................................................................. 27
3.3.1
Introduction .................................................................................................................................. 27
3.3.2
SLGLAO Results ......................................................................................................................... 28
3.3.3
Architecture Comments ............................................................................................................... 31
4.
SUB-SYSTEM ANALYSIS
33
4.1
Atmospheric Dsipersion Compensators .......................................................................................... 33
4.1.1
Function ....................................................................................................................................... 33
4.1.2
Specifications .............................................................................................................................. 33
4.1.3
Interfaces ..................................................................................................................................... 33
4.1.4
Description ................................................................................................................................... 33
4.1.4.1
Opto-mechanical requirements
37
4.1.4.2
Mechanical overview
38
4.1.5
Performance and Compliance .................................................................................................... 41
4.1.6
Development Risks ..................................................................................................................... 41
4.1.7
Cost and FTE .............................................................................................................................. 42
4.2
3MfR Focal Reducer ........................................................................................................................ 42
4.2.1
Function ....................................................................................................................................... 42
Page : 3/108
February 15, 2006
4.2.2
Specifications .............................................................................................................................. 42
4.2.3
Interfaces ..................................................................................................................................... 42
4.2.4
Description ................................................................................................................................... 43
4.2.4.1
Mechanical support
43
4.2.5
Performance and Compliance .................................................................................................... 45
4.2.6
Development Risks ..................................................................................................................... 47
4.2.7
Cost and FTE .............................................................................................................................. 47
4.3
Slit Mask Units ................................................................................................................................. 47
4.3.1
Function ....................................................................................................................................... 47
4.3.2
Specifications .............................................................................................................................. 47
4.3.3
Interfaces ..................................................................................................................................... 48
4.3.4
Description ................................................................................................................................... 48
4.3.5
Performance and Compliance .................................................................................................... 48
4.3.6
Development Risks ..................................................................................................................... 48
4.3.7
Cost and FTE .............................................................................................................................. 48
4.4
Collimators ....................................................................................................................................... 49
4.4.1
Function ....................................................................................................................................... 49
4.4.2
Specifications .............................................................................................................................. 49
4.4.3
Interfaces ..................................................................................................................................... 49
4.4.4
Description ................................................................................................................................... 49
4.4.5
Performance and Compliance .................................................................................................... 49
4.4.6
Development Risks ..................................................................................................................... 49
4.4.7
Cost and FTE .............................................................................................................................. 49
4.5
VPH Gratings ................................................................................................................................... 50
4.5.1
Function ....................................................................................................................................... 50
4.5.2
Specifications .............................................................................................................................. 50
4.5.3
Interfaces ..................................................................................................................................... 51
4.5.4
Description ................................................................................................................................... 51
4.5.5
Performance and Compliance .................................................................................................... 51
4.5.6
Development Risks ..................................................................................................................... 51
4.5.7
Cost and FTE .............................................................................................................................. 51
4.6
VPH Exchange Mechanism ............................................................................................................. 51
4.6.1
Function ....................................................................................................................................... 51
4.6.2
Specifications .............................................................................................................................. 52
4.6.3
Interfaces ..................................................................................................................................... 52
4.6.4
Description ................................................................................................................................... 52
4.6.5
Performance and Compliance .................................................................................................... 52
4.6.6
Development Risks ..................................................................................................................... 52
4.6.7
Cost and FTE .............................................................................................................................. 52
4.7
Camera Articulation Mechanisms .................................................................................................... 52
4.7.1
Function ....................................................................................................................................... 52
4.7.2
Specifications .............................................................................................................................. 53
4.7.3
Interfaces ..................................................................................................................................... 53
4.7.4
Description ................................................................................................................................... 53
4.7.5
Performance and Compliance .................................................................................................... 54
4.7.6
Development Risks ..................................................................................................................... 54
4.7.7
Cost and FTE .............................................................................................................................. 54
4.8
Cameras........................................................................................................................................... 55
4.8.1
Function ....................................................................................................................................... 55
4.8.2
Specifications .............................................................................................................................. 55
4.8.3
Interfaces ..................................................................................................................................... 55
4.8.4
Description ................................................................................................................................... 55
4.8.5
Performance and Compliance .................................................................................................... 56
Page : 4/108
February 15, 2006
4.8.6
Development Risks ..................................................................................................................... 57
4.8.7
Cost and FTE .............................................................................................................................. 57
4.9
Detectors .......................................................................................................................................... 57
4.9.1
Function ....................................................................................................................................... 57
4.9.2
Specifications .............................................................................................................................. 57
4.9.3
Interfaces ..................................................................................................................................... 58
4.9.4
Description ................................................................................................................................... 58
4.9.5
Performance and Compliance .................................................................................................... 58
4.9.6
Development Risks ..................................................................................................................... 58
4.9.7
Cost and FTE .............................................................................................................................. 58
4.10
Support Structures ........................................................................................................................... 59
4.10.1
Function .................................................................................................................................. 59
4.10.2
Specifications .......................................................................................................................... 59
4.10.3
Interfaces ................................................................................................................................ 60
4.10.4
Description .............................................................................................................................. 60
4.10.5
Performance and Compliance ................................................................................................ 60
4.10.6
Development Risks ................................................................................................................. 60
4.10.7
Cost and FTE .......................................................................................................................... 60
5.
SCHEDULE AND BUDGET
61
5.1
Summary .......................................................................................................................................... 61
5.2
Product Breakdown Structure (PBS) ............................................................................................... 62
5.3
Work Breakdown Structure (WBS) .................................................................................................. 64
5.3.1
Summary WBS ............................................................................................................................ 64
5.3.2
Detailed Work Breakdown Structure (WBS) ............................................................................... 65
5.4
Project Schedule .............................................................................................................................. 70
5.4.1
Critical Path ................................................................................................................................. 70
5.4.2
Gantt Chart .................................................................................................................................. 70
5.5
Cost Estimate ................................................................................................................................... 73
6.
WFOS-PETITE: A SINGLE-BARREL VERSION OF MILES
75
6.1
Introduction ...................................................................................................................................... 75
6.2
The D4 Advantage ............................................................................................................................ 75
6.3
Seeing-Limited Science on TMT: .................................................................................................... 79
6.4
Conclusions...................................................................................................................................... 79
7.
REFERENCES
83
8.
APPENDIX I (VPH GRATINGS)
84
8.1
VPH gratings in the context of 30 meter telescopes ....................................................................... 84
8.2
The importance of the maximum working angle ............................................................................. 85
8.3
Assessment of the MILES concept ................................................................................................. 89
8.4
Possible changes to the MILES concept design ............................................................................. 95
8.5
Conclusions...................................................................................................................................... 96
9.
APPENDIX II (OPTICS PRINCIPLES)
98
9.1
Preamble .......................................................................................................................................... 98
9.2
Optical Principles ............................................................................................................................. 98
9.2.1
Telescope .................................................................................................................................... 98
9.2.2
Focal Reducer ............................................................................................................................. 98
9.2.3
Collimator................................................................................................................................... 101
9.2.4
Camera ...................................................................................................................................... 102
9.3
Optical Prescription ........................................................................................................................ 102
Page : 5/108
February 15, 2006
9.4
9.5
Optical Performance ...................................................................................................................... 102
Remarks ......................................................................................................................................... 102
10.
APPENDIX III (COMPETITVE QUOTES)
104
10.1
Preamble ........................................................................................................................................ 104
10.2
The Quotes .................................................................................................................................... 105
10.2.1
Tinsley (Quotation no. 2069) ................................................................................................ 105
10.2.2
Saint-Gobain Crystals ........................................................................................................... 105
10.2.3
Goodrich-Danbury ................................................................................................................ 106
10.2.4
SAGEM DS ........................................................................................................................... 106
10.2.5
SAGEM Défense Sécurité .................................................................................................... 106
10.2.6
LightWorks Optics ................................................................................................................. 107
10.3
Remarks ......................................................................................................................................... 107
Page : 6/108
February 15, 2006
TABLE OF FIGURES
Figure 2:1 4-barrel layout on f/15 (or f/22) focal plane. .................................................................................... 14
Figure 2:2 Isometric view of f/15 system (as seen from the telescope) ............................................................ 14
Figure 2:3: 3000 l/mm grating necessary to achieve highest resolutions at the UV/blue end of the instrument
bandpass. The curves represent the efficiencies at working angles 33°- 45° (from left to right) in
increments of 3° degrees. The CCD coverage (not shown) is about 50nm at this dispersion. This
grating is 5m thick with a 0.035 variation in the refractive index. ............................................................ 19
Figure 2:4: Efficiency curves for blue blazed and red blazed 1200 l/mm gratings. The blue lines are angles
of 10° -25° for a 5m grating with 0.05 index modulation. The red lines are angles 25° - 40° degrees for
a 5m grating with 0.1 index modulation. .................................................................................................. 20
Figure 2:5 Spot plots for an f/15 3MfR system with uncompensated ADC at maximum extension (circles are
1” dia). ........................................................................................................................................................ 21
Figure 2:6 Spot plots for an f/15 3MfR system with a GLAO-mirror compensated ADC at maximum extension
(circles are again 1” dia)............................................................................................................................. 22
Figure 2:7 Side view........................................................................................................................................... 24
Figure 2:8 Rear View (towards telescope). ....................................................................................................... 25
Figure 3:1 Radial cuts through the diffraction limited, seeing limited and SLGLAO PSFs for the three
turbulence profiles in Table 3:1 and observing wavelengths of 1.3μm and 0.8μm. The SLGLAO PSFs
are shown for angular offsets of 0, 30 and 60”from the laser guide star. ................................................. 30
Figure 3:2 Optimal slit widths and integration time improvements as a function of observing wavelength for a
SLGLAO architecture for the good and typical turbulence profiles in Table 3:1. Curves are shown for
angular offsets of 0”, 60”, and 120” from the laser guide star. .................................................................. 31
Figure 4:1: The optical design of the MILES trombone ADC, shown for top and bottom fields. Three field
angles are shown for one wavelength only. .............................................................................................. 34
Figure 4:2: The ADC units shown configured for a minimum zenith angle of 0o, hence minimum dispersion is
introduced by the prisms. ........................................................................................................................... 35
Figure 4:3: An overview of the MILES trombone ADC. For each of the 4 optical channels there is one
trombone ADC composed of 2 large fused silica prisms, ADC1 and ADC2. ADC1 is moved relative to a
stationary ADC2 as a function of telescope zenith angle, the larger the zenith angle the larger the
separation. The prisms differ slightly in thickness, as discussed in the text. ........................................... 36
Figure 4:4: The 4 channels of the MILES trombone ADC.................................................................................. 38
Figure 4:5: Overview of the ADC1 mechanical assembly. Each prism has 4 degrees of freedom:, 3
translational and 1 rotational. All 4 ADC1 cells onto 1 plate (colored green) so that the z-axis translation
can be performed using one mechanism for all optics. Similarly for the y-axis movement the top and
bottom pairs are mounted onto a y-stage. Movement along the x-axis is unique to each prism cell and
therefore each prism has a separate x-stage. The rotation mechanism, a rotational friction drive is
directly mounted to the x-stage together with the roller bearings that support the prisim cell and allow
rotational movement. ................................................................................................................................. 39
Figure 4:6: A close-up of the ADC1 prism assembly. ........................................................................................ 39
Figure 4:7: The MILES trombone ADC1 assembly in the instrument enclosures. ............................................ 40
Figure 4:8: A suitable friction drive for the z-axis motion of the ADC1 assembly. ............................................. 41
Figure 4:9 3MfR paraxial schematic. ................................................................................................................. 43
Figure 4:10: The 1.6m diameter paraboloid of the Infrared Spatial Interferometer Array (ISI, UC Berkeley)
adopts a simple radial chain support. The mirror is stationary with optical axis horizontal. ..................... 44
Figure 4:11: The optics and location of the 3MfR for one of the 4 MILES channels ........................................ 45
Figure 4:12 Spot plots for an f/15 A-G telescope (circles are 0.5” dia). ............................................................ 46
Figure 4:13 Spot plots for an f/15 to f/7.5 3MfR system (circles are again 0.5” dia). ........................................ 46
Figure 4:14 An example mechanical mask in development for various 8m telescope projects. ...................... 48
Figure 4:15 The 4 articulated cameras, excluding the frame-work surrounding them, are shown as mounted
on dual optical benches. The arrows indicate the direction of articulation with the underlying 2-fold
symmetry clearly demonstrated. The 90° circular guide rails are mounted directly onto the optical
benches beneath the primary mirror of each camera. .............................................................................. 54
Figure 4:16 Imaging spots for the full telescope/3MfR/spectrograph optical train. (Circles are 1.0” dia). ....... 56
Figure 4:17 Example spectroscopic spots (R0.75 ~4000) assuming a centered slit (c ~350nm) out to the
edges and corners of the detector. (Circles are again 1.0” dia). .............................................................. 57
Figure 4:18: Schematic of the MILES support structure. The enclosure is supported on a 3-point mount
comprising a self-aligning rotation bearing at the rear of the instrument and 2 roller bearings at the front
Page : 7/108
February 15, 2006
of the enclosure. A worm drive, located close to the plane of the roller bearings, provides the rotation
mechanism for the field de-rotation. .......................................................................................................... 59
Figure 5:1. Product Breakdown Structure for MILES. The costing was developed according to the underlying
structure of the physical units of the MILES instrument. ........................................................................... 62
Figure 5:2. MILES Gantt chart (part 1) ............................................................................................................... 71
Figure 5:3 MILES Gantt chart (part 2) ............................................................................................................... 72
Figure 6:1 In this plot the ordinate (or y-axis) defines C in terms of spatial resolution (in mas) for a range of
spectral resolving powers (R) for four photometric bands......................................................................... 78
Figure 6:2 As in Figure 1, the ordinate defines C in terms of spatial resolution (in mas) but now for a fixed
spectral resolution (R=4,000) for all wave-bands from U through K. The improvement in spatial
resolution (C) obtained in the case of under-sampled spectral information (eg: 1-pixel per spectroscopic
slit) is highlighted. ....................................................................................................................................... 78
Figure 6:3 A sketch of WFOS-petite showing one (red) ADC barrel of MILES, a 45° fold to the vertical axis,
the 3-mirror Offner relay, the dichroic LGS splitter and one (yellow) barrel of the MILES spectrograph
shown protruding below the Nasmyth platform. The bottom “box” represents the space for the camera
articulation; the whole of the (yellow) spectrograph, including this “box”, rotates on a vertical axis
underneath the stationary Offner relay, mitigating the otherwise serious flexure issues associated with a
horizontal mount......................................................................................................................................... 82
Figure 7:1: The drop in VPH efficiency maxima at large working angle due to polarization effects. Surface
reflection losses are not included. ............................................................................................................. 87
Figure 7:2: Efficiency curve for a 400 mm pupil WFOS at maximum working angle of 37 degrees (1800 l/mm
grating, blue line) and the same curve for a 300 mm pupil WFOS at a maximum working angle of 45
degrees (2120 l/mm grating, red line). The bars denote typical CCD coverage, which is the same in
each case because the camera f ratio was held constant. ....................................................................... 88
Figure 7:3: 3000 l/mm grating necessary to achieve highest resolutions at the UV/blue end of the instrument
bandpass. The curves represent the efficiencies at working angles 33-45 degrees (from left to right) in
increments of 3 degrees. The CCD coverage (not shown) is about 50 nm at this dispersion. This
grating is 5 microns thick with a 0.035 variation in the refractive index. ................................................... 90
Figure 7:4: 2400 l/mm grating shown at angles from 25 to 45 degrees (left-to-right) in 5 degree increments.
The vertical bars show the edge of the CCD for the 35 degree curve. The other curves have
comparable wavelength coverage. This grating is 5 microns thick with 0.050 index variation. .............. 91
Figure 7:5: 1800 l/mm grating shown at angles from 25 to 45 degrees (left-to-right) in 5 degree increments.
The vertical bars show the edge of the CCD for the 35 degree curve. This grating is 5 microns thick with
0.085 index variation. ................................................................................................................................. 91
Figure 7:6: Efficiency curves for blue blazed and red blazed 1200 l/mm gratings. The blue lines are angles of
10-25 degrees for a 5 micron grating with 0.05 index modulation. The red lines are angles 25-40
degrees for a 5 micron grating with 0.1 index modulation......................................................................... 92
Figure 7:7: 600 l/mm blue grating at angles from 5-17 degrees in increments of 2 degrees. This grating is 9
microns with a modulation of 0.03. The greater thickness is necessary for efficientt scattering at low line
density in the blue. ..................................................................................................................................... 92
Figure 7:8:600 l/mm red grating at angles from 11-17 degrees in increments of 2 degrees. This grating is 5
microns with a modulation of 0.09. ............................................................................................................ 93
Figure 7:9: 350 l/mm grating that works efficiently over the entire instrumental bandpass. The angles shown
are 4, 6, 8, and 10 degrees, with CCD edges shown for the 6 degree case. This example also illustrates
how the efficiency drops for 2 degree field angle changes (equivalent to 1.7’ offset from center field) ,
and demonstrates that MILES will have good performance even for objects near the field edge. It also
shows that MILES will no require reflection gratings at low density. ......................................................... 94
Page : 8/108
February 15, 2006
1. EXECUTIVE SUMMARY
The Caltech Optical Observatories (COO) was contracted by the TMT Project to undertake a costing
study of their MILES concept that was developed to satisfy the requirements for a Wide-Field MultiObject UV/Optical spectrograph (WFOS). This costing study was in response to a proposal by COO, in
collaboration with Chris Clemens (UNC), to undertake a feasibility study. While the proposal was
rejected, nevertheless the basic idea was seen have sufficient merit to warrant a Costing Study which
would give the TMT Project a cost/performance base-line for assessing the various WFOS options under
consideration both now and in the future. The following is a little more than a costing study.
We begin, in Section 2, with a review of the MILES concept itself, taken largely from the original
proposal. This is followed by a brief examination (Section 3) of the RfP Review Panel’s comments on the
MILES concept, that were made available to the team. Section 4 presents a sub-system analysis of the
critical components of the instrument with a description of the functionality, specifications, interfaces and
description of each. Also included are material and labor cost estimates taken from the Product (PBS) and
Work Breakdown Structure (WBS) analysis of the program of work.
Section 5 presents the schedule and budget estimates as derived from a PBS and WBS analysis and
concludes with an overall budget (without formal contingency) of ~$53M with the project spanning the
next ~8 years.
Finally, in Section 6 we present arguments for de-scoping to a single-barrel version of MILES which we
refer to as WFOS-petite. Such an instrument, while having only a 1/4th of the field area of WFOS would
nevertheless be otherwise fully compliant with the SRD specifications. It would cost something less than
~$20M and, should the Caltech vision of IRMOS be chosen, could share TiPi’s Offner relay rather than
having its own dedicated relay (the 3MfR) thus presenting further savings to the Project in both funding
and infrastructure. Furthermore, as we will show, such a concept allows the instrument to bi-pass the 3mirror reflections of the Offner relay when AO-assisted observation are not required.
This, we argue, would be a cost-effective way ahead for the TMT WFOS project, given the D2
(dis)advantage of seeing-limited and GLAO-assisted UV/Optical observations. WFOS-petite represents,
therefore, the Caltech vision for the way ahead for WFOS on TMT.
The report concludes with 3 Appendices:
i.
A dissertation on VPH gratings as relating to WFOS, by Chris Clemens (UNC) who is a coauthor on the MILES costing study but who also has acted in an advisory capacity for the HIA
team’s WFOS feasibility study - Appendix I (VPH Gratings);
ii.
A theoretical exposition on the combined 3MfR focal-reducer and MILES spectrograph design
by optical design consultant, Damien Jones - Appendix II (Optics Principles);
iii.
A quotation compilation for the MILES optics, taken from several optics vendors who have
demonstrated an interest in the program of work - Appendix III (Competitve Quotes).
Page : 9/108
February 15, 2006
1.1 ACRONYMS AND ABBREVIATIONS
3MfR
ADC
A-G
AO
CALTECH
CaF2
CCD
CoDR
COO
D
DDR
DEIMOS
DL
DM
ELT
FoV
FWHM
GLAO
HIA
IFU
LGS
LRIS
M1
M2
M3
mas
MOAO
n
NIR
PDR
PBS
PSF
PSR
Qld
R
Rslit-width
RfP
RoM
SL
SLGLAO
SNR
SRD
TMA
TMT
UV
VPH
VPHG
WBS
3-Mirror Focal Reducer
Atmospheric Dispersion Corrector
Aplanatic Gregorian (telescope)
Adaptive Optics
California Institute of Technology
Calcium Flouride
Charge-Coupled Device
Concept Design Review
Caltech Optical Observatories
Diameter of Primary Mirror (30m)
Detailed Design Review
Dark Energy Imaging Multi-Object Spectrograph
Diffraction Limit
Deformable Mirror
Extremely Large Telescope
Field Of View
Full-Width at Half Maximum
Ground Layer Adaptive Optics
Herzberg Institute of Astrophysics
Integral Field Unit
Laser Guide Star
Low Resolution Imaging Spectrograph
3MfR’s 1st Mirror
3MfR’s 2nd GLAO Mirror
3MfR’s 3rd Mirror
Milli-arcseconds
Multi-Object Adaptive Optics
Refractive Index
Near-InfraRed
Preliminary Design Review
Product Breakdown Structure
Point Spread Function
Pre-Ship Review
Queensland (Australia)
Spectral Resolving Power
Spectral Resolving Power @ Slit-width (in arcsec)
Request for Proposals
Rough Order of Magnitude
Seeing Limit
Single Laser GLAO
Signal-to-Noise Ratio
Science Requirements Document
Triple-Mirror Anastigmat
Thirty Meter Telescope
Ultra-Violet
Volume-Phase Holographic (grating)
Volume-Phase Holographic Grating
Work Breakdown Structure
Page : 10/108
February 15, 2006
1.2 LIST OF SYMBOLS AND UNITS
This section should provide all the symbols and units that are used in the document with
conversions to SI, if applicable.
m
nm
”
’
º
n
l/mm
microns
nanometers
wavelength
arcseconds
arcminutes
degrees
Refractive Index Modulation
Grating Frequency (lines/mm)
Page : 11/108
February 15, 2006
2. THE MILES CONCEPT
2.1 INTRODUCTION
MILES is a 4-barrel multi-slit UV/optical spectrograph concept designed for the TMT which uses a focal
reducer (the 3MfR system) as a fore-optics relay to increase field of view (FoV), reduce the size of the multislit units and, most importantly, to facilitate ground-layer adaptive optics (GLAO). In almost all observing
conditions the GLAO facility permits enhancement of signal-to-noise (SNR) by concentrating the point
spread function and permitting the use of narrower spectroscopic slits. In the predominant sky-noise limited
regime both increases in SNR and spatio-spectral resolution can be achieved at a level which far outweighs
any small throughput losses that are encountered in the 3MfR fore-optics. Indeed the GLAO facility
envisaged is the simplest imaginable, with a single laser and deformable mirror (DM). The analysis presented
here (in Section 3.3.3 of this costing study) suggests that such a GLAO capability should always be
considered as a part of any ground-based UV/optical spectroscopic or imaging facility.
2.1.1
Compliance with the Science Requirements:
The TMT science requirements document (SRD: v15) defines the Wide Field Optical Imaging Spectrometer
(multi-slit) capability with the following broad attributes:
a.
b.
c.
d.
e.
f.
g.
Wavelength range: 0.31 – 1.0µm (required); 0.3 – 1.3µm (goal)
Field of view: 75 arcmin2 (required), 300 arcmin2 (goal)
Total slit length: ≥ 500”
Image quality: ≤ 0.2” FWHM over any 100nm wavelength interval
Spatial sampling: < 0.15”/pixel (required); < 0.1”/pixel (goal)
Spectral resolution: R0.75 <5000 for 0.75” slit (required); R0.75 <6000 (goal)
Throughput: ≥ 30% from 0.31 – 1.0µm
The MILES concept is compatible with, and is often well in advance of, almost all of the above requirements.
In detail:
a.
b.
c.
d.
e.
f.
Wavelength range: While the MILES concept is depicted here as a single beam
spectrograph accommodating the required 0.31 – 1.0µm wavelength range, there is no
fundamental reason for excluding a multi-beam option to comply with the larger 0.3 – 1.3µm
goal.
Field of view: The design was base-lined at the 75 arcmin2 requirement. Somewhat larger
fields can be accommodated within the MILES concept if some modest compromise to
imagery in the outer field is accepted.
Total slit length: A total slit length of >1,000” is achieved; twice that defined by the
requirements. Further gains in slit length can be accommodated, again at some modest
compromise to imagery.
Image quality: <120mas (FWHM) is achieved for all fields at the input focal plane although
the ADC inevitably degrades this to <190mas in the outer extremities of the field, while the
spectrograph minimally degrades the imagery from input focal plane to detector.
Spatial sampling: The MILES spatial sampling is ~86mas/pixel, assuming a standard 15m
pixel, and hence is compliant with the goal.
Spectral resolution: Assuming VPH gratings (VPHGs) and restricting the camera
articulation angle to 90°, a spectral resolution given by a 0.75” slit, R0.75 ~7000 can be
achieved. Considerably higher resolutions (or commensurately wider spectral coverages) are
achievable with the narrower slits facilitated by GLAO.
Page : 12/108
February 15, 2006
g.
2.1.2
Throughput: Total efficiencies (not including telescope and atmosphere) ≥ 31% are
estimated for all wavelengths. No compromise in throughput is implied by the 3 extra
reflections imposed by the 3MfR system since this allows for larger beam spectrographs that
can accommodate superior blaze efficiencies. This is additional to further substantial SNR
gains implied by the GLAO capability.
Telescope compatibility
Optical designs are presented for an f/1 primary, aplanatic Gregorian (A-G), telescope with an f/15 secondary.
Earlier designs, compliant an f/22 top-end, are also available.
2.2 CONCEPT OVERVIEW
The MILES concept employs a 4-barrel design whose main characteristics are as follows:
1.
2.
3.
4.
The first designs to be studied assumed an f/15 aplanatic Gregorian telescope configuration. The
total field of view was arbitrarily limited to the 75 arcmin2 specification although larger fields and
longer total slit lengths could, in principle, be accommodated through acceptance of some marginal
aberration degradation with field angle.
The full system is deployed in a 4-barrel configuration with each sub-field arm incorporating:
a. an atmospheric dispersion corrector (ADC) of the “trombone” variety placed upstream of the
f/15 telescope focus;
b. an off-axis 3-mirror focal reducer (3MfR) which de-magnifies by a factor of 2 producing an
f/7.5 intermediate focus with a ~4.33’ square (~400mm dia.) field of view. A multi-slit unit
will be deployed at this intermediate focus;
c. the 3MfR design is constrained to image the telescope pupil on its second mirror. Amongst
other things, this facilitates adaptive correction of ground layer turbulence and hence is
referred to here as the GLAO mirror.
d. a dioptric spectrograph collimator with a ~3m focal length delivering a beam-size of ~400mm
adequate for a 0.75” slit resolution R0.75 ~5000, as specified in the SRD. For spectroscopy,
the dispersing element is assumed to be a VPHG, in a transmission Littrow configuration,
feeding an articulated camera whose angle to the collimator optical axis can be adjusted over
at least a 90° range to capture the required spread of spectral dispersions and central
wavelengths. The use of VPHGs and articulated cameras is not fundamental to the design but
is offered as the likely best alternative to optimizing efficiency;
e. a camera with a catadioptric Schmidt-like design operating at f/1.2 and feeding a 2:1 aspect
ratio detector which encompasses the full 4.33’ sub-field of view along its short (slit-length)
axis. In the base-line design the CCD detector is curved to match the curvature of the
camera’s focal surface and would have a format of ~3k-by-6k, given a pixel pitch of 15m
(~86mas on the sky). Design also exists for slightly slower f-ratios that possess a fieldflattener onto a standard CCD package. Detector package vignetting within the camera is
estimated at <4%.
The four sub-fields of the 4-barrel system are distributed in a cross pattern, as shown in Figure 2:1.
We will assume that the instrument is mounted on a TMT Nasmyth platform with its primary
optical axis horizontal. This will require the mechanical design to accommodate significant
changes in gravity vector as the field rotates and will almost certainly involve active flexure
compensation to maintain optical alignment. Tip-tilt actuation of the second (GLAO) mirror in the
3MfR can be used to maintain independent alignment of the four slit modules on the sky.
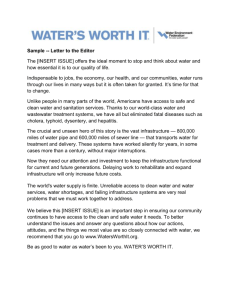
An isometric view of the full, 4-barrel, instrument (3MfRs plus spectrographs) is shown in Figure
2:2 on the assumption that the optical axis is horizontal. In order to avoid changing gravity
vectors due to field rotation, the primary optical axis could be folded to the vertical at, or near, the
telescope’s Nasmyth focus. However, in this configuration, the upward looking spectrograph
Page : 13/108
February 15, 2006
cameras will obscure the incoming beam as the instrument rotates. In order to avoid this, two
further reflections within the collimator would be required to fold the cameras away from the beam
in a downward looking orientation. The requirement for 3 extra reflections (1 at the telescope
focus and 2 within the collimator of the spectrograph) is at odds with the requirement for optimum
efficiency and hence is currently excluded from further discussion. Furthermore, such a
configuration is likely to increase the required back-focal distance for the telescope.
Page : 14/108
February 15, 2006
ADC foot-print
4.33 arcmin.
individual fields
20 arcmin.
A-G FoV
Figure 2:1 4-barrel layout on f/15 (or f/22) focal plane.
3MfR mirrors
1st
3rd
nd
2 (GLAO)
1 of the 4-barrels
spectrographs
1 of the 4-barrels
3MfRs
f/15 A-G telescope focus
Figure 2:2 Isometric view of f/15 system (as seen from the telescope)
Page : 15/108
February 15, 2006
2.3 THE 3MFR FOCAL REDUCER
2.3.1 Optical Performance
The theoretical basis and detailed design for the 3MfR system is given in Appendix II (Optics Principles), as
supplied by Damien Jones, in the context of the f/15 TMT. The f/15 3MfR prescription, together with its f/22
counterpart, is available on request from Prime Optics, Qld.
A highly satisfactory aberration balance has been achieved with reflective optics which are readily
manufacturable (competitive quotations for all the 3MfR mirrors are given in Appendix III (Competitve
Quotes). Spot plots for representative field positions (Figure 4:13) are compared with the equivalent spots at
the f/15 input focus (Figure 4:12). As can be seen, while the 3MfR images are somewhat “fluffier”, no
overall degradation of image quality, as measured by their rms radii, is apparent while an advantageous
rebalancing of aberrations about the individual sub-field centers is achieved.
2.3.2 3MfR Reflection Losses
Reflection losses in the 3MfR system are mitigated through use of high reflection coatings optimized for the
full 0.31 to 1m wavelength range. Such coatings have been developed at LLNL and have been successfully
deposited on the LRIS collimator for Keck. A new facility will, no doubt, have to be developed in order to
coat larger mirrors however the largest in 3MfR is ~1.2m on a side and hence is about the size of the
suggested TMT primary mirror segments with the advantage that the wavelength range and durability
specification for the coating can be significantly relaxed.
Assuming such coatings, the three reflections will produce losses of <14% broadly uniform over the full
wave-band. Such losses are unavoidable for focal reducers of this type but these are more than compensated
for by activation of the second (GLAO) mirror (Section 2.2.32.3.3). Even without GLAO, a simple tip/tilt
actuation of the second 3MfR mirror would be a major benefit in mitigating wind buffeting and Nasmyth
platform vibration however such gains while quite tangible are difficult to quantify until we have established a
firmer understanding of the mechanical performance of the telescope itself.
2.3.3
The GLAO Capability
If the second 3MfR mirror is changed for an adaptive GLAO deformable mirror then under a broad range of
atmospheric conditions improvements in direct imagery, slit coupling efficiency and resolution, both spatial
and spectral, will be achievable. In quantifying such gains we will assume that the GLAO mirror is
commanded from a Laser Guide Star (LGS) wave-front sensor with a single laser positioned somewhere in
the field of view of each of the 4.33’ sub-fields (four lasers in all). Modeling of such a simple AO
configuration has been performed using the Caltech group’s Arroyo software tool taking atmospheric
turbulence profiles from TMT site testing measurements; a theoretical discussion together with
comprehensive modeling results are given in Appendix B of the original MILES submission which is
summarized in Section 3.3.3. Substantial gains in wave-front error are predicted which indicate that, for
“better-than-median” conditions, much of the energy within the seeing disk will be concentrated into a
~100mas core.
Caveats:
The results presented in Appendix B of the original MILES submission and summarized in Section 3.3.3.
and the conclusions extracted herein are based on state-of-the art modeling using well established code,
however before launching into the results a few caveats are in order:
Page : 16/108
February 15, 2006
The analysis takes as its atmosphere the latest Cn2 measures from TMT site testing. This is unlikely
to be representative of the final site selected but is the best that can be done at this time;
The models assume a perfect adaptive mirror. No account is taken of actuator density or laser
power although conclusions derived for relative large slits (>400mas) are unlikely to be affected;
The models, as yet, do not take account of aberrations in the telescope/ADC/3MfR optical train.
As is demonstrated here, these are comparatively well contained and are not expected to effect the
broad conclusions that are derived.
As expected, GLAO gains in image enhancement are a strong function of seeing, wavelength, field angle and
zenith distance and it is to be expected that the power of such a capability is maximal for field zones centered
around the LGS when observing in the red. Such considerations would argue for modes of operation
whereby narrow (between ~100 and ~400mas) slits are deployed limiting the narrowest to a modest zone
around the LGS. In the following examples we define gain as the ratio between integration times required to
reach the same SNR when compared to a seeing-limited (GLAO-off), 800mas slit, observation. As is
demonstrated in Section 3.3.3.
in poor (25th percentile) seeing, and assuming a fixed ~800mas slit, gains are modest (<20%)
within a ~2’ zone around the laser and actually improve into the UV where the native seeing is
degrading. Outside this zone, and to the corners of the field, a small (<15%) degradation in gain is
experienced;
for median seeing conditions, and assuming now a ~400mas slit, substantial gains (up to ~2) are
predicted over the full 4.33’ field and extending down into the UV for fields with a ~1’ zone.
Outside this zone, and to the corners of the field, substantial (up to ~1.5) gains are experienced, but
in this case, only in the red;
in good (75th percentile) seeing very substantial (up to ~3) gains are made everywhere and at all
wavelengths if the slit-width is again reduced to ~400mas.
Of course such broad summary statements do no justice to an extremely complex parameter space and the full
import of such a GLAO capability requires the detailed exposition as supplied in Appendix B of the original
MILES submission (see also in Section 3.3.3).
It is natural to consider how such a GLAO capability might be used in practice. Of course, many choices can
be made to optimize slit-width to field angle. The very simplest approach would be to use the GLAO-off
condition with ~800mas slits in poor seeing while in good seeing one would use the GLAO-on condition with
~400mas slits irrespective of the wavelength, field angle or zenith distance range. This simple example is
made to bring out another vitally important advantage of GLAO. A reduction by a factor of 2 in slit-width
translates to a factor of 2 in wavelength coverage for a fixed spectral resolution. Even at camera f-ratios as
fast as f/1.2, the unfavorable pixel scale (>9 pixels per 800mas slit) means that wavelength coverage is at a
premium. Hence it is generally the case that a factor of 2 in wavelength coverage translates directly to a
further factor of 2 gain in exposure time.
Spectral and spatial resolution gains will also be compelling. In many instances the narrow slit will convert
into an increase in R which may be adaptively re-binned to enhance final SNR, however, the increased spatial
resolution (recalling the ~86mas pixel-size) will be of benefit in its own right.
It is clear, therefore, that under a large range of observing conditions substantial benefits are to be made from
such a GLAO capability either in required exposure time, spatio-spectral resolution or wavelength coverage
and very often in all three; thus amply justifying any marginal reflection losses that might be experienced in
the 3-mirror 3MfR chain.
Page : 17/108
February 15, 2006
2.3.4 Multi-slit assembly
For ground-based observations, multi-slit masks have almost always been machined either off-line or on
location at the telescope. This is a reliable, if rather inconvenient, costly and cumbersome arrangement which
does not allow for rapid response to changing observing conditions; nor does it allow for the effects of
differential atmospheric refraction to be taken into account. The advantage of machined masks over
mechanical slits is, however, the ability to customize and optimize the mask design for particular target
placements. A good example of using this to good effect is in DEIMOS where the position angle of
individual targets within a field is routinely chosen to optimize sensitivity to rotation curve analysis;
mechanical slits would not allow such freedom. However, in the context of a queue scheduled TMT,
machined slits may be simply too restrictive. The GLAO capability makes an additional compelling case for
mechanical slits, as advocated for NGST in order to facilitate rapid, on-line, selection of slit-widths as a
function of wavelength, position and atmospheric conditions.
(see: http://www.csem.ch/fs/micro_mechanics.htm).
2.3.5 Other benefits of the active GLAO mirror
Not only does the GLAO mirror support the correction of ground layer atmospheric turbulence, it has several
other compelling, although as yet unquantified, capabilities when used simply in low order, tip-tilt mode:
Wind buffeting: Motions of the secondary induced by wind disturbances can be compensated by
tip-tilt actuation of the GLAO mirror. Resonant frequencies in the order of ~10Hz or higher are
well within the practical tip/tilt range of such a 200mm diameter mirror;
Compensation for resonant vibrations of the Nasmyth platform with respect to the telescope can
also be affected;
Differential flexure between the four fields of the 4-barrel system can be accommodated;
Independent fast guiding of the individual fields can be achieved.
A not quite as obvious, but nevertheless very important, capability for the GLAO mirror, is the ability to
correct quasi-static aberrations induced by astigmatism in the ADC “trombone” thus mitigating the otherwise
inevitable image degradation imposed by the ADC prisms. This capability is quantified in Section 2.5.
2.3.6
3MfR Baffling
From the standpoint of secondary mirror wind buffeting there is a clear argument for avoiding telescope
baffles if at all possible. The need for baffles is thought to be most critical to wide-field optical imaging and
spectroscopy since it is necessarily the case that IR instruments will require very effective internal cold stops.
Indeed telescope baffles are generally considered detrimental to IR capabilities.
There is, therefore, a compelling case to be made for rigorously baffling a wide-field optical imager and
spectrograph. While there is generally a pupil stop within a spectrograph’s collimated beam, the addition of
an up-stream pupil stop, supplied naturally within the 3MfR system, will further mitigate ambient light
scattering into the instrument to a degree where telescope baffling becomes unnecessary. Furthermore,
MILES’ spectrographs look into a darkened enclosure rather than directly out into the dome making their
baffling to stray light consequently easier. The job of quantifying such scattering is beyond the scope of this
report, however it is clear that up-stream, fore-optics, baffling within MILES will be of significant benefit in
this context.
Page : 18/108
February 15, 2006
2.3.7
Calibration Sources
The MILES spectrographs are backward looking into a large enclosure that allows for easy mounting of
calibration sources which can directly illuminate the input f/7.5 focal surface of the spectrographs. Without
the 3MfR system all calibration would have to be supplied up-stream of the ADC and hence very far from
focus and difficult to control, requiring a darkened dome for accurate calibration.
2.3.8
3MfR Output Focal Surface:
A further important advantage to the 3MfR concept is that the output image field curvature can be tailored to
match the downstream optics of the spectrograph, as detailed in Appendix II (Optics Principles). The concave
object surface presented to the spectrograph turns out to be ideal for a dioptric collimator and hence allows for
considerably larger beams with consequently more efficient dispersion options. Furthermore, the focal
surface is telecentric compatible with the adaptation to fiber feeds and deployable integral field unit (IFU)
applications should these be required (see SRDv15).
2.4
THE SPECTROGRAPH
2.4.1 Collimator
The 3m focal length collimator consists of two all-spherical fused silica/CaF2 groups (maximum diameter
~480mm), one directly after the input focal surface, the other close to the 400mm pupil. The first of these is
optimized for the full spectral window, from 310nm to 1m, while the second group has two selectable
wavelength-optimized versions, one for the blue (310nm << 560nm) and one for the red (560nm << 1m).
Such a design allows for optimized A/R coatings for the second group (plus camera) and is compatible with a
double-beam spectrograph design where a selection mirror or dichroic is positioned between the two groups.
This arrangement also, of course, allows for optimized detectors. However for simplicity of presentation, we
have chosen to cost the system in a single beam configuration where each wavelength range would be
selected through exchange of the lower collimator group. Indeed such a configuration may be preferred in the
context of a GLAO corrected spectrograph on a queue-scheduled telescope where optimum observing
efficiency is highly wavelength dependent.
2.4.2 Dispersive Elements
With a spectrograph beam size of 400mm, standard surface ruled reflection gratings will have to be mosaiced;
the same is true for VPHGs although monolithic VPH transmission gratings of this size may become
available within a matter of a few years. Either way, grating size is not foreseen as a significant problem.
While VPHGs have obvious advantages (eg: cost, efficiency and blaze tuning) there are no fundamental
optical design reasons for excluding standard reflection gratings apart from the difficulties of producing a well
defined pupil stop – this may be seen as a problem when considering telescope baffling (see Section 2.3.6).
However the proposed camera will support the extra pupil relief necessitated by reflection gratings thus
avoiding the added complexity of camera articulation. The choice will depend on a detailed engineering and
cost benefit analysis which is outside the scope of this report.
Assuming VPHGs: In order to maximize bandwidth, the grating medium (DCG) thickness should be as low
as possible. This in turn imposes an index modulation, n, as high as possible. Current technologies limit n
to >0.2; the following Gsolver simulations conservatively assume a n =0.15. In the analysis used to generate
the blaze efficiencies fringe frequencies are set to a resolution, R0.75 ~4000 and grating thicknesses are
optimized for peak efficiency at 400, 600, and 800nm. In fact, 2 gratings suffice to cover the whole visible
band with efficiency higher than 80%. Example blaze efficiency curves are shown in Figure 2:3 and Figure
Page : 19/108
February 15, 2006
2:4, taken from Clemens Report (Appendix I (VPH Gratings). Each individual curve shows the blaze
function at a given grating angle. The envelope of these curves represent the “superblaze”, the peak of the
blaze at each grating angle.
In these examples the wavelength band encompassed by the detector is everywhere significantly smaller than
the FWHM of the blaze function hence indicating a relatively high average efficiency across the blaze.
However, for spectrographs with smaller beams (say ~250mm) higher fringe frequencies (3000 l/mm in the
blue), larger blaze angles and hence narrower blaze functions are indicated, the combined effect of which is to
significantly decrease overall efficiency. A detailed comparison is required to quantify such losses however it
is more than likely that in many cases these may be comparable with any reflection losses in the 3MfR
system.
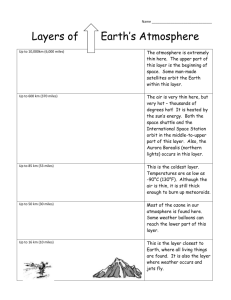
Figure 2:3: 3000 l/mm grating necessary to achieve highest resolutions at the UV/blue end of the instrument
bandpass. The curves represent the efficiencies at working angles 33°- 45° (from left to right) in increments of 3°
degrees. The CCD coverage (not shown) is about 50nm at this dispersion. This grating is 5m thick with a 0.035
variation in the refractive index.
Page : 20/108
February 15, 2006
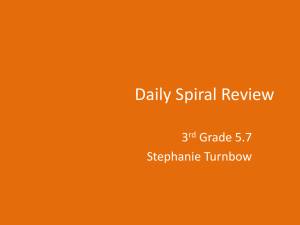
Figure 2:4: Efficiency curves for blue blazed and red blazed 1200 l/mm gratings. The blue lines are angles of 10° 25° for a 5m grating with 0.05 index modulation. The red lines are angles 25° - 40° degrees for a 5m grating with
0.1 index modulation.
2.4.3 Camera
In order to achieve sensible pixel matching for a seeing-limited instrument on such a large telescope very fast
f-ratios, approaching or exceeding f/1 (~100mas/15m-pixels or ~8 pixels/800mas slit) are desirable. In order
to achieve good aberration control in the context a modified Schmidt camera design we have opted to use a
doublet (fused silica/CaF2) aspheric corrector which, when combined with a CCD that is curved to match the
Schmidt’s f/1.2 focal surface, gives adequate performance over the field of view defined by a 3k-by-6-k
detector. Example imaging and spectroscopic spots at various wavelengths and field positions are given in
Figure 4:16 & Figure 4:17. There are two challenges to producing such a camera:
The diameter of the CaF2 aspheric is ~525mm. At an early stage in the project some uncertainty was
expressed in generating such a large piece however we now have several competitive quotes which seem to
confirm their availability. Should such pieces be viewed as too expensive or too high risk, in mitigation, we
would either descope the spectrograph beam size by ~10% and take the marginal hit on slit-width*resolution
product and camera vignetting or redesign for a fused silica triplet corrector. Either way, the SRD
specification will still be readily met.
A curved CCD is a relatively novel feature of the design; however manufacturers and workers in the field (eg:
E2V, UofA’s ITL, UCOLick, JPL – also see: Swain et al. 2004, SPIE 5499) all appear to agree that this will
be possible for a relatively low level of investment. We will, of course, propose a small linked program of
development to study this issue. The impact of retreating to a field-flattened design, if necessitated, is not
considered to be critical.
A camera design issue that has not been addressed relates to the question of the location and cooling of the
CCD. There is no doubt that a 400mm beam Schmidt camera requires a large dewar if the full camera is
going to be cryogenically cooled. While not impossible, some cameras have avoided this by packaging the
detector in their own mini-cryostat. This inevitably increases vignetting and the decision on whether to locate
the CCD externally through the use of a folded Schmidt design remains an option to be studied.
Page : 21/108
February 15, 2006
2.5 THE ATMOSPHERIC DISPERSION CORRECTOR (ADC)
Atmospheric dispersion compensation is either done with counter-rotating Risley prisms or fused silica
prisms which are tromboned; both schemes achieve an approximate match to the dispersion of the atmosphere
and both are widely used (or invoked). Large (~1m) ADCs of both types have been successfully deployed
however they both require to be located a long way (several meters) from focus to be effective; while the
MILES designs have a secondary f/7.5 focus there is simply not enough space in 3MfR to accommodate
ADCs of either type. The only space available is up stream of the telescope focus itself. These considerations
further exacerbate an already serious problem of overall size. Risley prisms based on the fused silica/CaF2
combination cannot be accommodated without mosaicing separate hexagonal prisms which would be very
undesirable and, as a result, the use of trombone ADCs for each individual barrel was studied.
Aberrations induced by the two prisms are unfortunately non-negligible and are exacerbated as the zenith
angle increases and the trombone extended. This can be mitigated by decreasing the prism angles,
necessitating an increase in overall extension. However, as is shown in Figure 2:5 & Figure 2:6, quasi-static
distortion of the second (GLAO) mirror in the 3MfR is able to compensate for much of this effect. On
average, an improvement in FWHM of ~40% is achieved over the field (worst case ~190mas) with almost
perfect compensation at the field center.
Figure 2:5 Spot plots for an f/15 3MfR system with uncompensated ADC at maximum extension (circles are 1”
dia).
Page : 22/108
February 15, 2006
Figure 2:6 Spot plots for an f/15 3MfR system with a GLAO-mirror compensated ADC at maximum extension
(circles are again 1” dia).
2.6
THROUGHPUT
Losses per surface, together with filter, grating and CCD efficiency as a function of wavelength, are given
in Table 2:1. The estimates have been constructed under the following assumptions:
Each column entry is an estimated average over a 100nm waveband;
All three 3MfR mirrors are assumed to be coated using the LNLL “magic” coating as for the LRIS
collimator (see: SRD Appendix 3). The practicality of such coatings on the GLAO mirror has not
been addressed;
Single layer MgF2 coatings have been assumed for broad-band A/R coatings;
A double beam spectrograph is assumed with coatings and CCDs optimized accordingly.
Wavelength (-)optimized coatings are assumed to take an average value of ~0.75% across the
band;
The VPH grating efficiency is taken as 80%. This is well below the maximum predicted from
GSolver models but takes into account manufacturing tolerances, blaze function and grating tuneability;
The detector QE values are taken assuming blue optimized E2V devices and red optimized LBNL
devices.
Page : 23/108
February 15, 2006
Wavelength
Surface
ADC
3MfR
Collimator
A/R coating
(1st group)
A/R coating
(2nd group)
Camera
A/R coating
(corrector)
Mirror
Notes
(nm)
350
450
550
650
750
850
950
4 surfaces
(MgF2)
0.89
0.93
0.95
0.95
0.93
0.92
0.91
3 surfaces
(LNLL)
0.88
0.86
0.86
0.87
0.90
0.89
0.94
0.89
0.93
0.95
0.95
0.93
0.92
0.91
0.97
0.97
0.97
0.97
0.97
0.97
0.97
0.97
0.97
0.97
0.97
0.97
0.97
0.97
0.96
0.96
0.95
0.96
0.95
0.96
0.96
0.96
0.97
0.96
0.96
0.96
0.98
0.96
0.80
0.80
0.80
0.80
0.80
0.80
0.80
0.80
0.94
0.95
0.90
0.80
41%
41%
38%
35%
4 surfaces
(MgF2)
4 surfaces
(-optimized)
4 surfaces
(-optimized)
1 surfaces
(LNLL)
Vignetting
VPHG
Filter
Av. over blaze
Peak
0.80
0.80
0.80
0.80
0.80
0.80
CCD-B
CCD-R
(E2V)
(LBNL)
0.80
0.82
0.88
Total
31%
33%
38%
Table 2:1 Efficiency breakdown as a function of wavelength.
As is clearly indicated, highly competitive throughput is predicted despite the additional 3MfR mirrors.
Any comparison with smaller beam spectrographs which do not require focal reducer pre-optics needs to
factor in the deleterious effects of higher grating frequencies and the lack of a GLAO capability.
2.7 INSTRUMENT LAYOUT, SIZE AND WEIGHT:
We have opted for a configuration which retains the primary optical axis in the horizontal plane. To fold
to the vertical will require 3 extra reflections (1 at the telescope f/15 focus and 2 within the collimator of
the spectrograph) and is likely to increase the required back-focal distance for the telescope. A horizontal
axis will require the mechanical design to accommodate significant flexure as the instrument rotates and
will almost certainly involve flexure compensation mechanisms to maintain optical alignment. Tip/tilt
actuation of the GLAO mirror in the 3MfR can be used to maintain independent alignment of the 4 slit
modules on the sky.
The full 4-barrel configuration is shown in Figure 2:2 and the following 2 figures (Figure 2:7 & Figure
2:8):
Page : 24/108
February 15, 2006
f/15 A-G telescope focus
Articulated cameras
Figure 2:7 Side view
Separate lens group
optimized for blue and red
Space for ADCs
Page : 25/108
February 15, 2006
GLAO
mirror
3MfR
1st mirror
Articulated
cameras
Spectrograph
Figure 2:8 Rear View (towards telescope).
2.7.1 Weight/Space budget
Overall dimensions: 9m x 5.3m diameter (excluding ADC)
Spectrograph dimensions: 4.8m x 700mm diameter (each)
Focal reducer glass weight: ~980 lbs x 4 = 3920 lbs x 5(scaling factor) = 19600 lbs.
Spectrograph glass weight: ~595 lbs x 4= 2380 lbs x 10(scaling factor) = 23800 lbs.
Total weight estimate: 43,400 lbs (~20 tons)
Page : 26/108
February 15, 2006
2.8
CONCLUSIONS:
The design of a wide-field UV/optical multi-slit spectrograph for the TMT has been presented with the
following characteristics:
The system is fully compliant in field of view, spectral resolution and throughput with the SRD
requirements;
Yet larger fields of view are achievable as an extension of the conceptual design at the cost of
some marginal degradation in performance at the extremes of the field;
A range of A-G telescope configurations, from f/15 to f/22, are achievable. R-C telescope
configurations are unlikely to be within the scope of such designs;
Quotes are in for the aspheric mirrors while the sizes of the large CaF 2 components are within
achievable bounds;
GLAO and tip-tilt correction of the 4 individual fields is achievable through activation of the
second 3MfR focal reducer mirror. Significant gains in SNR, exposure time and wavelength
coverage are indicated for almost all wavelengths and observing conditions.
There remain some significant areas of investigation to be pursued:
A more rigorous exploration of design space including telescope configuration, ADC, 3MfR and
spectrograph design needs to be achieved;
The practicability of flexure compensation, including the control of the articulated cameras, should
be studied;
The possibility of using a quaternary mirror to permit a vertical optical axis should be investigated;
The optical and cryogenic design of the catadioptric cameras should be studied under a variety of
assumptions, including corrector cost optimization and the possibility of using a folded Schmidt
design;
The cost and implementation of dual (or multi-) beam spectrographs within the overall design
framework needs to be studied;
The viability of large format or mosaic VPH gratings needs to be verified;
A study on the practicability and cost of curved CCDs should be initiated.
Page : 27/108
February 15, 2006
3. RESPONSE TO REVIEW PANEL (APRIL, 2005)
While the COO MILES team had no access to the RfP Review report, the team was told of 3 major
perceived “problems” with the concept. We will briefly address these in the following sub-sections:
3.1 CURVED CCDS
It is readily demonstrated that, for seeing-limited spectroscopy on a 30m telescope, a key performance
parameter governing wavelength range and object multiplex, is camera speed1. This is a simple pixelscale effect; a 1” slit subtends ~10, 15m CCD pixels at f/1. Given detector formats are ultimately limited
by camera field angles, then this inefficient usage of both detector real-estate and, more importantly
camera information capacity, both spectrally (wavelength range) and spatially (object multiplex),
fundamentally limits the power of any seeing-limited spectrograph. A well recognized method for
maximizing camera speed is to use an internal focus Schmidt-type camera and having adopted such a
design, an effective way of maximizing camera speed is to dispense with the normal field-flattener and
invoke a curved CCD which matches the natural curvature of the Schmidt’s focal surface. Curved CCDs
for just this purpose have been built2 and are under development3 and, as is clearly acknowledge by the
HIA WFOS team, it is a technology which warrants serious investigation. The COO proposal offered a
curved CCD design as its base-line while giving an easy fall-back to a flat CCD configuration as a risk
mitigation strategy (see Section 2.2, sub-section 2e). This is still our position.
3.2 AVAILABILITY OF LARGE CAF2
The panel expressed reservations as to the practicality of procuring CaF 2 blanks of diameter above
~500mm. However, as was stated clearly in the COO proposal, not only were the sizes of CaF2 within
manufacturing range, we already had RoM quotes for all the MILES optics; we would not have presented
the design had this not been the case. Furthermore, clear mitigation strategies involving a ~10% reduction
in beam size, were given (as in Section 2.4.1). During this costing study, a much more rigorous
competitive exploration of suppliers has been undertaken, not only for the CaF2 components but for the
full optical train, including the 3MfR mirrors. It is noteworthy that this renewed quotation exercise has
revealed significant cost savings stimulated, it is presumed, by the seriousness of the renewed inquiries. It
should be further noted that the new pricing has folded into it a level of contingency which allows the
manufacturer an appropriate level of failure. The supplier takes all the risk until the pieces are delivered.
We therefore remain perfectly confident of our abilities to procure the optics.
3.3 PSF VARIABILITY OF SLGLAO
3.3.1 Introduction
As part of the WFOS design study, TMT investigated the feasibility of providing some level of adaptive
optics compensation. Two possible AO concepts were studied. HIA proposed a ground layer adaptive optics
(GLAO) option that uses 4, 5, or 8 lasers distributed over the 10’ field. This concept uses the adaptive
secondary (AM2) to perform AO compensation over the entire field. The adaptive correction is formulated
by averaging the wave-front measurements from the laser guide stars to synthesize a mean correction over the
field.
Caltech proposed an option that provided compensation across one or more of the four 5’ sub-fields of
MILES. This option was based on a single laser driving a deformable mirror that formed the second element
of the three mirror (3MfR) relay ahead of the four spectrographs within MILES. This concept is called single
laser GLAO, or SLGLAO.
Page : 28/108
February 15, 2006
The project chose to form a collaboration that would compare these two options in simulation. To this end,
Ellerbroek, Roberts and Britton performed Monte Carlo simulations using three different wave propagation
codes to assess the field dependent performance delivered by the GLAO and SLGLAO options. The
turbulence profiles used in the simulations are shown in Table 3:1.
(Results from the Arroyo simulations performed by Matthew Britton are posted on the web at URL
http://eraserhead.caltech.edu/glao simulations/glao simulations.html.)
The results from all three of these simulations were very consistent. The simulations showed that a GLAO
system could deliver integration time improvements relative to the seeing limit of order 30% at 800nm in
typical turbulence conditions at zenith. The performance improvement was roughly uniform over the 10’
field. A SLGLAO system delivers best performance on axis, with increases of order 45% on axis, falling off
towards 10% at the edge of a 5’ field. For both of these systems, the performance improvements decrease
towards the blue end of the spectrum and towards larger zenith angles. Further, these performance
improvements did not account for AO operational overheads, such as the unavailability of laser guide stars in
the presence of Cirrus clouds.
Section 3.3.2 describes a particular feature displayed by the SLGLAO architecture, which may be of scientific
utility. While Section 3.3.3 discusses some of the overall issues that bear on the choice of an AO system for
WFOS.
Table 3:1 Gemini good, typical and bad turbulence profiles. Turbulence parameters are quoted at a wavelength of 0.5μm.
3.3.2 SLGLAO Results
The performance improvement in a GLAO system arises from the fact that this architecture provides a modest
reduction in the width of the seeing limited core. The resulting image quality improvement looks much like
one was observing in better seeing conditions. A SLGLAO system also effects this type of correction under
typical turbulence conditions at 800nm.
Page : 29/108
February 15, 2006
A SLGLAO system demonstrates a fundamentally different type of correction at somewhat longer
wavelengths or under better turbulence conditions. In such conditions, a near diffraction-limited core will
develop at the center of the PSF towards the center of the 5’ field. This core sits atop a halo of substantially
greater width. Figure 3:1 shows radial slices through the SLGLAO PSFs as a function of observing
wavelength for the three turbulence profiles in Table 3:1. While the Strehl ratios delivered by a SLGLAO
system are only of order 1%, the peak of the SLGLAO PSF can nevertheless be one to two orders of
magnitude larger than that of the seeing limited PSF.
The existence of this near diffraction-limited core permits MILES to operate in a very different regime. As
may be seen in Figure 3:1, the fraction of flux in the SLGLAO PSF core is an increasing function of
observing wavelength. The SNR for a background limited observation goes as SNR (S(t)0.5)/w, where S is
the slit coupling fraction, t is the integration time, and w is the slit width. At some wavelength it becomes
advantageous from an SNR perspective to reduce the slit width from a value near the seeing limit to one near
the diffraction limit. Because the SLGLAO PSF depends on location within the field of view, this transition
depends on field location as well as turbulence conditions.
Figure 3:2 shows the optimal slit width as a function of observing wavelength for the three turbulence profiles
in Table 3:1. This slit width was computed by evaluating the slit coupling fraction of the SLGLAO PSFs as a
function of slit width and choosing the slit width that maximizes the SNR. In good turbulence conditions, the
transition between seeing limited slits and diffraction limited slits occurs between 600 and 800nm. In typical
turbulence conditions, this transition occurs red-wards of 1m. This illustrates that the SLGLAO PSF is quite
sensitive to turbulence conditions.
Figure 3:2 also shows the integration time ration between seeing limited and SLGLAO observations. These
curves were computed by evaluating the integration time required to reach the equivalent SNR. The ratio
begins to increase dramatically red-ward of the transition between seeing-limited and diffraction-limited
optimal slits. In good conditions, SLGLAO integration times may be reduced by one to two orders of
magnitude between 0.8 and 1m. This must be balanced against the fraction of time that such turbulence
conditions actually exist above the telescope, the fraction of the 5’ field over which these SLGLAO PSF cores
are available, and the fraction of science that will be performed towards the red end of the spectrum. The near
diffraction-limited mode of operation afforded by SLGLAO may also be scientifically useful for performing
high angular resolution spectroscopy.
Page : 30/108
February 15, 2006
Figure 3:1 Radial cuts through the diffraction limited, seeing limited and SLGLAO PSFs for the three turbulence
profiles in Table 3:1 and observing wavelengths of 1.3μm and 0.8μm. The SLGLAO PSFs are shown for angular
offsets of 0, 30 and 60”from the laser guide star.
Page : 31/108
February 15, 2006
Figure 3:2 Optimal slit widths and integration time improvements as a function of observing wavelength for a
SLGLAO architecture for the good and typical turbulence profiles in Table 3:1. Curves are shown for angular offsets
of 0”, 60”, and 120” from the laser guide star.
3.3.3 Architecture Comments
The performance improvements afforded by both GLAO and SLGLAO are quite modest relative to the D4
advantage that is traditionally associated with AO. These marginal benefits must be weighed carefully
against the cost, complexity and operating overheads that characterize adaptive optics systems. This section
lists some of the overall considerations that bear on the decision.
If a GLAO architecture is to be considered, then it must be understood that such a capability relies on the
existence of an AM2. Currently, the project is planning to procure an AM2 for some time after first-light, and
GLAO will not be available until the AM2 is installed. However, as it currently stands, WFOS is to be used
very heavily during the first few years of TMT operation. If the project ultimately decides against an AM2,
then a GLAO system cannot be built for WFOS.
If WFOS does not meet the goal of operation out to 1.6m, any AO concept for this instrument will lose
appeal. AO compensation will always deliver better performance at longer wavelengths, regardless of the
architecture. The GLAO concept is not opening up any new scientific parameter space. It simply operates to
slightly reduce the size of the seeing disk. If a GLAO system is delivering an effective reduction in
integration time of order 30% at 800nm with decreasing advantage towards the blue, then one must ask
whether an increase in the size of the seeing limited field of view would serve the equivalent scientific
Page : 32/108
February 15, 2006
purpose. Such an increase might be purchased at a cost comparable to the GLAO system, and would carry
much less risk.
Finally, a SLGLAO architecture offers a rather unique capability of high angular resolution spectroscopy and
large integration time reductions in favorable turbulence conditions. To realize this advantage, a WFOS
concept will need to be able to respond to changes in the turbulence conditions. The use of mechanical slits
would be strongly favored in this mode of operation.
Page : 33/108
February 15, 2006
4. SUB-SYSTEM ANALYSIS
The MILES instrument contains the following subsystems, all of which will be costed to a best effort
level of accuracy. The subsystems are as follows:
4.1 ATMOSPHERIC DSIPERSION COMPENSATORS
4.1.1
Function
An ADC is required to effect an approximate cancellation of atmospheric dispersion over a range of
zenith angles down to ~65º.
4.1.2
Specifications
All paralactic angles and zenith angles down to to ~65º must be accommodated and the best match to
atmospheric dispersion, within physical constraints of available materials, sought for wavelengths in the
range 310nm < < 1000nm. The final performance should be not significantly degrade the image quality
specification (≤0.2” FWHM over any 100nm wavelength interval) given in Section 2.1.1.
4.1.3
Interfaces
TMT’s f/15 input beam at Nasmyth;
Each arm of the 4-barrel system should be compensated;
Control of the ADC through the telescope operating system.
4.1.4
Description
For the reasons given in Section 2.5, a trombone (or linear) ADC has been designed to be mounted
directly ahead of the primary Nasmyth input focal surface. The largest element, that of the moving front
prism, has a diameter of 1050mm and a maximum extension of 4.2m is required to give compensation
down to ZD < 65º. The optical design of the ADC trombone prisms is shown in Figure 4:1, for a
maximum zenith angle of 65°, and Figure 4:2, for a minimum zenith angle of 0°. There are 4 ADC
channels, one for each of the MILES 5’ fields, as shown in Figure 4:3. The prisms for the top and bottom
fields, colored differently in Figure 4:3, have different thicknesses and hence different masses as
summarized in the Table 4:1 below. The mounting and control for the prism elements, however, remains
identical.
Page : 34/108
February 15, 2006
Figure 4:1: The optical design of the MILES trombone ADC, shown for top and bottom fields. Three field angles
are shown for one wavelength only.
Page : 35/108
February 15, 2006
Figure 4:2: The ADC units shown configured for a minimum zenith angle of 0 o, hence minimum dispersion is
introduced by the prisms.
Page : 36/108
February 15, 2006
Figure 4:3: An overview of the MILES trombone ADC. For each of the 4 optical channels there is one trombone
ADC composed of 2 large fused silica prisms, ADC1 and ADC2. ADC1 is moved relative to a stationary ADC2 as a
function of telescope zenith angle, the larger the zenith angle the larger the separation. The prisms differ slightly in
thickness, as discussed in the text.
Page : 37/108
February 15, 2006
4.1.4.1
Opto-mechanical requirements
A summary of the essential positioning requirements for the MILES ADC is shown in Table 4:1.
Optic
Mass
Diameter Thickness Z
max
Z
X
tolerance max
Y max
X/Y
Rotation
tolerance z
tolerance
ADC1
82kg
1.05m
43mm
4.2m
±1mm
36mm
355mm
±1mm
1deg
ADC2
67kg
0.95m
43mm
-
-
-
-
-
-
ADC1
108kg
1.05m
56.5mm
4.2m
±1mm
7mm
28mm
±1mm
1deg
ADC2
88kg
0.95m
56.5mm
-
-
-
-
-
-
TOP
FIELD
BOTTOM
FIELD
Table 4:1 A summary of the basic mechanical properties of the MILES trombone ADC and positioning
requirements placed on the mechanical support and mechanism. The trombone ADC is comprised of 2 large fused
silica prisms that differ slightly in thickness from the top field to the bottom. The positioning requirements are
relatively relaxed as expected for an ADC.
Further requirements, as summarized in Figure 4:3 and Figure 4:4:
All prisms are mounted with planar faces approximately horizontal (a slight angular tilt is required
for the 4 ADC channels);
The ADC1 prism moves relative to prism ADC2, with ADC2 fixed relative to the focal surface;
The ADC1 prism requires mostly z-axis motion (~4.2m from 0o to 65o zenith), however, a small
amount of lateral motion is required in both X and Y, summarized in Table 4:1 and shown using a
front view of the MILES ADC in Figure 4:3;
The 4 ADC1 units translate in unison along the z-axis as the zenith angle of the telescope changes.
The 2 top ADC1 units translate in unison along the y-axis, as do the 2 bottom units. Each ADC1
prism moves in a specific x-direction as the zenith angle changes, however, the directions and
amounts are equal and opposite for the top and bottom units respectively.
All 4 ADC prism pairs must rotate about their respective chief ray. All channels rotate in unison
and are aligned, as atmospheric dispersion, and therefore correction, is always acted along a
specific direction;
The entire ADC unit is rotated as the MILES enclosure performs field de-rotation.
Page : 38/108
February 15, 2006
Figure 4:4: The 4 channels of the MILES trombone ADC
4.1.4.2
Mechanical overview
An overview of the ADC mechanical sub-system is shown in Figure 4:5 and a close-up of a single ADC
unit is shown in Figure 4:6.
The prism cells are mounted via 3 rotation bearings to an x-axis stage, one stage for each prism
cell. A rotational friction drive provides the necessary means of rotating the prism cell relative to
the x-axis stage;
The 2 top field x-axis stages are connected to a single y-axis stage via carriage and rails (not
shown), allowing linear movement of the x-axis stages;
The same is true for the 2 bottom field units, as the required y axis travel during an observation is
identical;
The 2 y-axis stages move linearly with respect to the large z-axis support plate using dc brushless
servomotor driven carriage and rails;
The support plate moves freely along 3 rails, colored red in the figure;
All drive mechanisms assume suitable in built encoders, though linear and rotary encoders could
be used for absolute motion determination;
The ADC2 units, only shown as optical elements in the figures, adopt the same prism cell design
(though smaller) and are mounted to a stationary plate.
An example of the possible mechanism and rail that could be adopted for the z-axis motion is that of the
high performance friction drive shown by Parker Automation (http://www.daedalpositioning.com) in
Figure 4:8. Figure 4:7 shows the ADC assembly within the MILES outer volume.
Page : 39/108
February 15, 2006
Figure 4:5: Overview of the ADC1 mechanical assembly. Each prism has 4 degrees of freedom:, 3 translational and
1 rotational. All 4 ADC1 cells onto 1 plate (colored green) so that the z-axis translation can be performed using one
mechanism for all optics. Similarly for the y-axis movement the top and bottom pairs are mounted onto a y-stage.
Movement along the x-axis is unique to each prism cell and therefore each prism has a separate x-stage. The rotation
mechanism, a rotational friction drive is directly mounted to the x-stage together with the roller bearings that support
the prism cell and allow rotational movement.
Figure 4:6: A close-up of the ADC1 prism assembly.
Page : 40/108
February 15, 2006
Figure 4:7: The MILES trombone ADC1 assembly in the instrument enclosures.
Page : 41/108
February 15, 2006
Figure 4:8: A suitable friction drive for the z-axis motion of the ADC1 assembly.
4.1.5
Performance and Compliance
As demonstrated in Section 2.5, when fully extended, the ADC’s performance marginally degrades the
underlying aberration of the 3MfR. However, by applying a suitable correction to the 3MfR’s central
GLAO mirror, in all cases imaging onto the slit plane is controlled to within ~190mas and hence is
compliant with the requirements in the SRD.
4.1.6
Development Risks
Large FS optics; quotations available - see Appendix III (Competitve Quotes)
Page : 42/108
February 15, 2006
4.1.7
i.
Cost and FTE
Design/Inspection/Assembly/Test:
Mechanical: 3.7 FTE
Electronics: 0.4 FTE
Software: 0.5 FTE
ii.
Fabrication:
iii.
$200K (Lens Cells and Mechanisms)
Procurement:
$1,660 (Prisms and Mechanisms)
4.2 3MFR FOCAL REDUCER
4.2.1
Function
The 3MfR is a 2:1 focal reducer system - in essence a TMA - which converts the input f/15 Gregorian focus
to f/7.5. It possesses the following important properties:
The delivered f/7.5 output focus has a focal curvature (convex to the light) freely optimized to
reduce the size and complexity of the spectrograph collimator design. Such matching between
3MfR and collimator means that no field lens is required which reduces the overall diameter of front
element lenses for a given beam diameter;
The 3MfR re-images the telescope pupil onto its 2nd mirror. This can then act as the location of a
piezo-actuated DM for low-order AO-correction (eg: SLGLAO);
The output f-ratio (f/7.5) reduces by a factor of 2, the linear size of multi-slit masks required at the
input to the spectrographs.
4.2.2
Specifications
The 3MfR, combined with the ADC is required to deliver an imaging performance <0.2” (FWHM) over its
full 4.33’ FoV. Reflection losses in the 310nm < < 1000nm range should be minimized through use of
suitable reflective coatings.
4.2.3
Interfaces
TMT’s f/15 input beam at Nasmyth interposed by the ADC;
The four 3MfR barrels of the MILES instrument are oriented and rotated as a body with respect to a
horizontal optical axis on the Nasmyth platform;
The pupil position and curvature of the output focal surface is chosen to optimize spectrograph
collimator design;
Control of rotation of the four barrels is driven by the telescope operating system.
Page : 43/108
February 15, 2006
4.2.4
Description
A full exposition of the 3MfR optical system is given in Section 2.3. The 3MfR represents an asymmetric
Offner configuration with anamorphic figuring on each of its 3 mirrors (M1, M2 & M3) delivers an f/7.5
near-telecentric focus on a convex image surface of radius 2 meters.
The 3MfR is a special case of a TMA (triple-mirror anastigmat) in an asymmetric Offner-like configuration.
A telecentric output is delivered by M3 with a focal point at its own centre of curvature. A paraxial schematic
is shown below in Figure 4:9.
Figure 4:9 3MfR paraxial schematic.
4.2.4.1
Mechanical support
M1/M3
The largest of the 3MfR mirrors, M1, is 1.2m in diameter, with M3 at a diameter of ~800mm. Given the
mirrors are mounted with optical axes approximately horizontal, we envisage no technical problems adopting
a standard strap or chain support, such as that used in the support of the 1.6m diameter paraboloid for the
Infrared Spatial Interferometer Array (ISI, UC Berkeley) shown during installation in Figure 4:10. Three hard
points spring loaded to the back of the mirrors can be used for tip/tilt activation for initial optical alignment.
The four M1 mirror cells can be mounted onto the back-plate of the MILES instrument. The mirrors require
no active movement during an observation.
Page : 44/108
February 15, 2006
M2
The 200mm diameter M2 mirror requires no special cell itself. Located at the pupil, the mirror can be
mounted to a piezo-driven tip/tilt stage for ground layer turbulence correction and for important flexure
compensation.
A full sub-system view of the optics and mechanical support structure is shown Figure 4:11.
Figure 4:10: The 1.6m diameter paraboloid of the Infrared Spatial Interferometer Array (ISI, UC Berkeley) adopts a
simple radial chain support. The mirror is stationary with optical axis horizontal.
Page : 45/108
February 15, 2006
Figure 4:11: The optics and location of the 3MfR for one of the 4 MILES channels
4.2.5
Performance and Compliance
Spot plots for representative field positions (Figure 4:13) are compared with the equivalent spots at the f/15
input focus (Figure 4:12). As can be seen, while the 3MfR images are somewhat “fluffier”, no overall
degradation of image quality, as measured by their rms radii, is apparent while an advantageous rebalancing
of aberrations about the individual sub-field centers is achieved. In terms of FWHM, the f/15 system
produces a range of 30mas to 120mas (center-to-corner).
It is to be expected that the delivered performance of the telescope/3MfR combination will be degraded
somewhat by fabrication and alignment errors however we conclude that a total FWHM error budget of ~0.2”
can be accommodated by the 3MfR. Further degradation is to be expected from astigmatism in the trombone
ADC however this can be partially compensated through quasi-static deformation of the second (GLAO)
mirror in the 3MfR system, as will be demonstrated in section 2.5.
Page : 46/108
February 15, 2006
Figure 4:12 Spot plots for an f/15 A-G telescope (circles are 0.5” dia).
Figure 4:13 Spot plots for an f/15 to f/7.5 3MfR system (circles are again 0.5” dia).
Page : 47/108
February 15, 2006
4.2.6
Development Risks
The 3MfR atoroidal mirrors do not have rotational symmetry and require special fabrication
techniques. Nevertheless, quotations for their production have been received from several vendors;
The 2nd GLAO mirror in 3MfR is not flat and thus any piezo DM requires special fabrication.
Nevertheless, a flat back-surface onto the piezo is perfectly acceptable (sag ~2mm), hence in
principle we see no problem. Brief contact with suppliers has confirmed this.
4.2.7
i.
Cost and FTE
Design/Inspection/Assembly/Test:
Mechanical: 4.3 FTE
Electronics: 1.0 FTE (primarily for GLAO)
Software: 2.0 FTE (primarily for GLAO)
ii.
Fabrication:
iii.
$800K (WFSs)
Procurement:
$8,280 (Mirrors and Piezo-DMs)
4.3 SLIT MASK UNITS
4.3.1
Function
Mechanical slit mask, as developed for both optical and near-IR multi-slit spectrographs, are advocated for
MILES given their greater compatibility with the requirements of queue scheduling and the need to vary the
slit-width adaptively to accommodate fast changing atmospheric conditions. Examples of such actuated slit
mechanisms can be seen at http://www.csem.ch/fs/micro_mechanics.htm. Four such slit masks are required
at the output focus of the 3MfR.
4.3.2
Specifications
Specifications for the mechanical slit masks need to iterated with the supplier. They are expected to have the
following approximate attributes:
Slit mask height ~285mm (~4.33’);
Individual slitlet height ~5.5mm (~5”) allowing for an object multiplex of ~50 per field;
Slit width variable from 0mm – 285mm (ie: fully open, to allow for direct imaging);
Minimum slit width increments ~100m (~0.1”);
Slit-width accuracy ~50m;
Field configuration time <30s;
Slit-width adaptive adjustment time <1s
Page : 48/108
February 15, 2006
4.3.3
Interfaces
f/7.5 output focus of the 3MfR;
Mechanical interface to each of the four spectrographs and to the instrument main structure;
Control interface to OCS and to the AO control system to permit adaptive control of slit width.
4.3.4
Description
Examples of the mechanical multi-slits can be found at: http://www.csem.ch/fs/micro_mechanics.htm. An
example of a mechanical mask for use in Cryogenic temperatures is shown in Figure 4:14.
Figure 4:14 An example mechanical mask in development for various 8m telescope projects.
4.3.5
Performance and Compliance
4.3.6
Development Risks
None
4.3.7
i.
Cost and FTE
Design/Inspection/Assembly/Test:
Page : 49/108
February 15, 2006
Mechanical: 0.1 FTE
Electronics: 0.5 FTE
Software: 0.5 FTE
ii.
Procurement:
$4,000 (Mechanical Masks)
4.4 COLLIMATORS
4.4.1
Function
A collimator is required to deliver a 400mm pupil at which a VPH grating is to be placed. The full 310nm to
1m is to be accommodated.
4.4.2
Specifications
Collimation optics of 3m effective focal-length are required to deliver a collimated beam over the full 4.33’
FoV, covering field angles of ±3.8º. A pupil relief sufficient to allow grating rotation of 45º is required. The
full wavelength range is accommodated by two sets of transmission optics optimized independently for blue
(310nm < < 560nm) and red (560nm < < 1m) wavelength ranges. While the MILES concept can
accommodate two independently optimized camera systems, allowing simultaneous wavelength coverage
over the complete 310nm to 1m range through use of a dichroic prior to the VPH grating, a simpler, single
camera system has been costed here.
4.4.3
Interfaces
f/7.5 output focus of the 3MfR;
Mechanical interface to each of the four spectrographs and to the instrument main structure;
Control interface to OCS to allow choice of wavelength range.
4.4.4
Description
The 3m focal length collimator consists of two all-spherical fused silica/CaF2 groups. The first of these is
optimized for the full spectral window, from 310nm to 1m, while the second group has two selectable
wavelength-optimized versions, one for the blue (310nm << 560nm) and one for the red (560nm << 1m).
Such a design allows for optimized A/R coatings for the second group.
4.4.5
Performance and Compliance
Control of collimation is achieved at the required ±3.10-5 radian level. The 400mm re-imaged pupil is located
sufficiently far from the last collimator element to give space for a 45º VPH grating.
4.4.6
4.4.7
Development Risks
Large CaF2 optics; quotations available - see Appendix III (Competitve Quotes)
Cost and FTE
Page : 50/108
February 15, 2006
i.
Design/Inspection/Assembly/Test:
Mechanical: 1.8 FTE
Electronics: 0.1 FTE
Software: 0.2 FTE
ii.
Fabrication:
iii.
$600K (Lens Cells and Mechanisms)
Procurement:
$11,800 (Lenses and Mechanisms)
4.5 VPH GRATINGS
4.5.1
Function
The VPH gratings are the optical elements that disperse light in the MILES spectrographs. Each
spectrograph will have a full complement of 8 gratings composed of dichromated gelatin sandwiched between
fused silica substrates with anti-reflection coatings to minimize surface reflections. They will likely be 2x2
mosaics of smaller gratings since no manufacturer currently produces monolithic devices of the size we
require, which is 410mm x 580mm.
4.5.2
Specifications
Table 4:2 below describes the manufacturing parameters for each of the 8 spectrograph gratings.
Line density
3000
2400
1800
1200-b
1200-r
600-b
600-r
350
Film thickness (d)
5m
5m
5m
5m
5m
9m
5m
19m
Modulation (dn)
0.035
0.050
0.085
0.050
0.100
0.030
0.090
0.020
Table 4:2 VPHG parameters for the full suit of gratings.
Plots of the properties of each of these gratings are included in the Appendix I (VPH Gratings). The delivered
efficiencies shall match those calculated by rigorous coupled wave analysis to within 5%. The line density
shall match that specified to within 1%. The glue and substrate material shall be transparent in the UV.
Optically the grating shall introduce no more than 1.25m peak to valley of wave-front distortion into the
diffracted beam. The anti-reflection coating shall have average reflectivity of less than 1% from 310nm to
850nm and less than 3% between 850nm and 11000nm, except for the gratings labeled “r”, which shall have
reflectivity averaging 1% or less from 600nm to 1100nm.
Page : 51/108
February 15, 2006
4.5.3
Interfaces
Mechanical to grating changer and tilt mechanism when in use
Optical to collimator exit pupil
4.5.4
Description
Each grating consists of a mosaic of 4 smaller devices mounted together on a larger substrate in a 2x2 matrix
and sealed against the entry of moisture. The entire assembly is subsequently anti-refection coated on both
sides in a process that does not expose the gratings to temperatures in excess of 100C. The film itself is a
dichromated gelatin film that has been exposed to a fringe pattern and processed to produce modulations in its
refractive index.
4.5.5
Performance and Compliance
The gratings meet all stipulated efficiency and wave-front requirements. Additionally, they must have
uniform clarity and anti-reflection coatings. They must be properly sealed to prevent the entry of moisture
and show no evidence of having admitted water or other liquids.
4.5.6
4.5.7
Development Risks
The vendor, CSL, has never made gratings of this size before, but has made similar items of
somewhat smaller size. They do not foresee any significant risk in fabricating what we have
requested.
Cost and FTE
(source CSL)
410 x 580 mm gratings fabricated to our specification
$90K each
adjust quote to reflect fused silica substrate
$10K each
acceptance testing and evaluation
$1K each
Total $101K x 8:
$808K per spectrograph
4.6 VPH EXCHANGE MECHANISM
4.6.1
Function
Grating exchangers are required in each of the four barrels of MILES to allow gratings to be selected for a
range of dispersions and wavelength ranges. While tuning the blaze of VPH gratings allows for some modest
savings in the number of gratings required (see Section 2.4.2) nevertheless somewhere between 4-8 gratings
will be required for delivery into each barrel; a total of ~24 mosaic VPH gratings (420mm by 600mm) are
envisaged.
Page : 52/108
February 15, 2006
4.6.2
Specifications
Each spectrograph of the 4-barrel system should be able to be independently configurable. All gratings
should be exchangeable within <5 minutes so that a full 4-barrel set of new gratings can be used.
4.6.3
Interfaces
Main structure of MILES;
The VPH rotation mechanism and camera articulation mechanism;
Control interface to OCS to allow choice of wavelength range.
4.6.4
Description
Two grating exchanger mechanisms will be mounted above and below the rotating body of MILES’ main
structure. The structure will rotate to the 4 cardinal positions to allow each barrel of the 4-barrel system to be
serviced. In principle this could require only one grating exchanger but because of the asymmetry imposed
by the camera articulation mechanisms the best solution is to have 2 grating juke-boxes above and below the
main structure as shown in Figure 4:18.
4.6.5
Performance and Compliance
The grating juke-boxes are designed to support up to 12 gratings each. Grating exchange times will be
determined by the maximum rotation speed of the main structure and the time to exchange each grating from
juke-box to/from the grating rotation and support mechanism.
4.6.6
Development Risks
None.
4.6.7
i.
Cost and FTE
Design/Inspection/Assembly/Test:
Mechanical: 3.7 FTE
Electronics: 0.2 FTE
Software: 0.2 FTE
ii.
Fabrication:
$130K (Mechanisms)
4.7 CAMERA ARTICULATION MECHANISMS
4.7.1
Function
The camera articulation mechanism is a platform capable of sweeping the entire optical camera assembly
through an angle of 90° about a fixed pivot point located as close as possible to the collimator exit pupil. This
pivot point should be located along the same axis around which the gratings tilt. The optical camera assembly
includes the shutter, camera optics, detector, dewar, electronics, and cooling apparatus. In addition, the
camera articulation platform must include some mechanism for making micron sized angular adjustments to
the camera on two dimensions. The function of this mechanism is to actively correct for flexures that
introduce angular misalignments between the camera and the optical beam of the spectrograph as presented at
Page : 53/108
February 15, 2006
the collimator exit pupil. An additional function is to compensate for additional flexures occurring elsewhere
in the mechanical assembly.
4.7.2
Specifications
The camera articulation shall be capable of carrying an 800 pound payload through an angle of 90° in a total
time not to exceed 30s. It shall further be capable of placing the load accurately and repeatably to within
10m (alternatively 10rads) of a commanded position, and holding it there reliably at all orientations of the
Nasmyth rotator, even if the power to the unit should fail. The outer chord swept by the payload shall not
extend more than 0.8m from the central pivot at any angle.
Attachment of the camera assembly to the articulation platform shall be via a set of tuned flexures on
orthogonal axes. These flexures should not add more than 10m to the total system flexure under changing
gravity vector, but should be capable of flexing by up to 200m under the influence of a motorized actuator.
The entire system shall be capable of adjusting the position of the camera focal plane accurately and
repeatedly to within 1m (rms) error (alternatively 1rads).
4.7.3
Interfaces
camera assembly
support structure
pivot point of grating tilt mechanism
control electronics for CCD camera, articulation stage, and active flexure compensation
cooling apparatus for CCD camera
4.7.4
Description
The space envelope opposite the articulated stage does not allow for a counter-weighted system, which would
be costly to the weight budget anyway. Consequently, the entire gravitationally induced torque of the camera
stage, which could be as high as 4000N-m, must be driven during motion. This rules out a centrally driven
solution, and suggests that the load be supported and driven along a curved rail at the perimeter of the swept
volume. Care must be taken not to over-constrain the motion, so the motion should be radially defined only
by the central pivot. The curved rail should provide constraints perpendicular to the radial direction. A drive
wheel or gear will move the stage along the rail, which must be encoded to micron resolution. This is similar
to the articulation stage designed for the Robert Stobie Spectrograph at the Southern African Large Telescope.
Once positioned, the stage must be held with a clamp that remains fast during power failure. The layout of
the cameras and the location of the articulation mechanisms is given in Figure 4:15.
With the detector internal to the Schmidt camera the design may not allow flexure correction via piezoelectric
actuation at the CCD plane, because it would increase the beam obscuration. If this is the case, the entire
camera will have to be actuated by motorized mechanisms. These mechanisms will work against flexures and
will be capable of correcting up to 200m of image motion.
Page : 54/108
February 15, 2006
Camera
primary
mirrors
Camera
correctors
Direction of
articulation
Figure 4:15 The 4 articulated cameras, excluding the frame-work surrounding them, are shown as mounted on dual
optical benches. The arrows indicate the direction of articulation with the underlying 2-fold symmetry clearly
demonstrated. The 90° circular guide rails are mounted directly onto the optical benches beneath the primary mirror
of each camera.
4.7.5
Performance and Compliance
Control of articulation is within 10m and subsequent flexure adjustments are within 1m. The stage moves
freely on its central bearing and is able to be driven in any orientation of the Nasmyth rotator. Total range of
motion is 90° without interference.
4.7.6
Development Risks
None.
4.7.7
i.
Cost and FTE
Design/Inspection/Assembly/Test:
Mechanical: 2.5 FTE
Electronics: 0.6 FTE
Page : 55/108
February 15, 2006
ii.
Software: 0.7 FTE
Fabrication:
iii.
$80K (Mechanisms)
Procurement:
$80K (Rails etc)
(NB: Goodman Spectrograph and Stobie spectrograph at SALT were factor of ~2 less costly.)
4.8 CAMERAS
4.8.1
Function
A wide-field, very fast camera is required to deliver maximal object and wavelength multiplex onto a CCD
detector. Its spatial FoV must encompass MILES’s collimator field while spectrally optimized for maximum
wavelength coverage. A Schmidt camera solution, with internal detector, is offered as an optimum solution,
although complex dioptric systems may also be feasible but are likely to be far more expensive.
4.8.2
Specifications
Each Schmidt camera has to support all wavelengths in the 310nm < < 1000nm range and is optimized for
an f-ratio of f/1.2 with a 3k -by- 6k, 15m pixel, CCD detector internal to the camera. This is equivalent to
camera field angles of ±6.1º. The camera aberrations must be controlled to comply with the <0.2” FWHM
(within each 100nm band) requirement. Vignetting must be minimized in order to contain throughput losses
of the full MILES system to >30% across the wavelength range.
4.8.3
Interfaces
Camera articulation mechanism;
Detector control system;
Control interface to OCS to allow for all observing procedures.
4.8.4
Description
In order to achieve good aberration control in the context a modified Schmidt camera design we have opted to
use a doublet (fused silica/CaF2) aspheric corrector which, when combined with a CCD that is curved to
match the Schmidt’s f/1.2 focal surface, gives adequate performance over the field of view defined by a 3kby-6k detector. A curved CCD is a relatively novel feature of the design requiring a linked program of
development to study this issue. The impact of retreating to a field-flattened design, if necessitated, is not
considered to be critical. To emphasize this attractiveness of curving the CCDs, the performance of the
design has been explored beyond the ±6.1º field limits to a régime which would support a 3k-by-12k detector
thus increasing the wavelength multiplex by a factor of 2. A field-flattened version would be limited to a 3kby-6k format at a possible cost of a slightly slower f-ratio and/or some degradation in image control.
Concerns previously raised by the large, 525mm, CaF2 components within the Schmidt corrector have
been covered in Section 3.3.2.
Page : 56/108
February 15, 2006
4.8.5
Performance and Compliance
Example imaging and spectroscopic spots at various wavelengths and field positions are given in Figure
4:16 & Figure 4:17.
Figure 4:16 Imaging spots for the full telescope/3MfR/spectrograph optical train. (Circles are 1.0” dia).
Page : 57/108
February 15, 2006
Upper slit
Center slit
Lower slit
Figure 4:17 Example spectroscopic spots (R0.75 ~4000) assuming a centered slit (c ~350nm) out to the edges and
corners of the detector. (Circles are again 1.0” dia).
4.8.6
4.8.7
i.
Development Risks
Curved CCDs – fall-back to flat is a viable option.
Cost and FTE
Design/Inspection/Assembly/Test:
ii.
Mechanical: 0.9 FTE
Fabrication:
iii.
$160K (Lens and Mirror Cells)
Procurement:
$5,360 (Lenses and Mirrors)
4.9 DETECTORS
4.9.1
Function
Detection of wavelengths between 310nm and 1m is required. Cameras are base-lined to support formats of
3K -by- 6K (15m) pixels. We include in the detector functionality the requirement for order sorting filters
since these are to be placed directly ahead of the field-corrector window of the CCD dewar; to do otherwise
would be to require massive filters >400mm in diameter. The f/1.2 speed of the beam passing through the
small, 50-by-100mm filters limits such filters to broad-band order sorters; narrow-band filter imagery would
necessitate mosaicking to accommodate the 400mm beam.
4.9.2
Specifications
If we assume a single-beam spectrograph configuration, the detector systems will be required to
operate over the full MILES wavelength range, placing strict demands on QE optimization.
Page : 58/108
February 15, 2006
Given the nominal ~12 pixel slit-width of the f/1.2 camera, cosmic ray hits will be a dominant noise
source with the corollary that short, repeated exposures will be required. This discourages the notion
of using fully depleted CCDs and requires that read-time optimization is at a premium.
Given the ~500mm diameter mouth of the camera, the CCD dewar will have as its window the small
field-corrector lens. Such a mini-dewar will need to present the smallest possible foot-print within
the camera in order to minimize vignetting. Cryogenic and electrical services to the dewar will have
to travel across the support veins supporting the mini-dewar unit.
Filter need to be loaded in front of the dewar window without increasing obscuration of the camera
beam.
4.9.3
Interfaces
CCD mini-dewar mounted internally within the Schmidt camera;
Vacuum, cryogenic and electrical services to the CCD;
Interfacing to the external detector system;
Filter exchange mechanism via a juke-box located externally to the rotating instrument structure.
4.9.4
Description
While the MILES cameras are base-lined for curved CCDs, this has been chosen to demonstrate
aberration performance advantages rather than to suggest that this new and promising technology is
a requirement. Equivalent cameras utilizing standard flat CCDs can be designed at a small cost to
aberration performance and camera speed. There is no doubt that compliance with the image
performance requirements can still be achieved with slightly slower cameras.
Given the fact that the cameras have to operate over the full MILES wavelength range, QE
optimization through suitably chosen A/R coatings is essential.
The filters will be loadable from a remote filter juke-box located at the periphery of the main rotating
instrument structure in an analogous manner to that of the gratings.
4.9.5
Performance and Compliance
While the detector formats are non-standard in the current design, serious attention will be paid to a
cost/benefit trade of custom CCDs (curved or flat) in comparison with standard production units. Detector
compliance with the WFOS requirements is not foreseen as a problem.
4.9.6
4.9.7
i.
Development Risks
None – provided we adopt flat CCDs.
Cost and FTE
Design/Inspection/Assembly/Test:
Mechanical: 2.0 FTE
Electronics: 2.4 FTE
Software: 2.4 FTE
ii.
Fabrication:
$200K (Dewar Internals; Filter Mechanisms)
Page : 59/108
February 15, 2006
iii.
Procurement:
4.10
$3,160K (CCDs; Filters; Field-corrector window)
SUPPORT STRUCTURES
4.10.1 Function
To support the MILES enclosure and allow for rotation about the telescope chief ray axis;
To rotate the MILES enclosure for field de-rotation.
Figure 4:18: Schematic of the MILES support structure. The enclosure is supported on a 3-point mount comprising
a self-aligning rotation bearing at the rear of the instrument and 2 roller bearings at the front of the enclosure. A
worm drive, located close to the plane of the roller bearings, provides the rotation mechanism for the field derotation.
4.10.2 Specifications
20 ton of rotating mass
Page : 60/108
February 15, 2006
Rotation angle accuracy ~20”
Survival of earthquake forces etc.
4.10.3 Interfaces
The support structure links directly to the TMT Nasmyth platform;
The MILES front surface (just ahead of the ADC1 plane at maximum zenith setting) is ~4.5m ahead
of the TMT Nasmyth focal plane.
4.10.4 Description
An overview of the support structure and rotation mechanism is shown in Figure 4:18. The MILES
enclosure, the large drum colored transparent blue in the figure, is supported kinematically on a 3-point
mount. At the rear of the instrument there is a self-aligning rotation bearing. At the front of the instrument
there are 2 roller bearings supporting radially the enclosure weight but allowing longitudinal movement of the
drum, due to thermal expansion for example.
The field de-rotation mechanism is a standard worm drive with suitable gearing incorporated between the
motor shaft and worm gear axis. The location of the drive is as close as possible to the plane of the roller
bearing support.
4.10.5 Performance and Compliance
The structure will require very significant FEA in order to establish flexure as we would like to adopt the 3point mount for kinematic reasons. We see no issues in adopting a worm drive mechanism for the de-rotation
drive of the instrument.
4.10.6 Development Risks
A 20 ton instrument - bearings and drive perfectly fine, 3 point support maybe too few though we
prefer this for kinematic reasons. FEA required - and linked with flexure compensation mechanism.
4.10.7 Cost and FTE
iv.
Design/Inspection/Assembly/Test:
Mechanical: 3.2 FTE
Electronics: 0.2 FTE
Software: 0.2 FTE
v.
Fabrication:
vi.
$160K (Mechanical parts)
Procurement:
$220K (Hydrostatic bearings)
Page : 61/108
February 15, 2006
5. SCHEDULE AND BUDGET
5.1 SUMMARY
In support of this costing study, we have developed a budget and schedule for the development of MILES
that is consistent with first-light deployment as a TMT science capability.
Our broad strategy is to schedule two phases of development, an initial ‘First-Science’ phase, which provides
for pure seeing-limited operation, on a time scale commensurate with TMT first-light, and a subsequent
‘GLAO Upgrade’ phase, lasting an additional ~1 year, as a risk mitigation strategy in the event that the
required AO infrastructure is delayed.
We assume full SRD functionality is obtained at the end of the ‘First-Science’ phase and that the major work
elements of the GLAO Upgrade Phase consist of commissioning the full functionality of the piezo-DM at the
3MfR’s M2 mirror.
We therefore consider the following top-level development schedule assuming a start date for the Concept
Design phase of MILES to be in mid-2006. In order to accelerate development, we have assumed that the
‘Full-scale Fabrication’ process begins in the middle of the ‘Detailed Design’ to allow for phased design and
fabrication of the long-lead items. The corollary is, of course, that the primary gate at which the Project
becomes committed to the program is at PDR rather than DDR; this is a common strategy for such large
projects.
Development Phase
Duration
Exit Gate
Instrument Conceptual Design
12 months
CoDR (7/07)
Preliminary Design
18 months
PDR (12/08)
Detailed Design
18 months
DDR (7/10)
Full-Scale Fabrication
24 months
PSR1 (9/11)
Integration and Test
15 months
PSR1 (12/12)
Commissioning
9 months
‘First-Science’ (9/13)
GLAO Upgrade
9 months
PSR2 (6/14)
Page : 62/108
February 15, 2006
5.2 PRODUCT BREAKDOWN STRUCTURE (PBS)
The top-level Product Breakdown Structure (PBS) for MILES is shown in Figure 5:1.
MILES
Main Structure
Rotator Base
Atmospheric Dispersion
Compensator
Mechanical Multi-Slit Mask
3MfR Focal Reducer
Spectrograph Sub-system
Collimator System
VPHG exchanger
Camera Articulation
Schmidt Camera
System
Filter Exchanger
Detector System
Acquisition and Guider System
Figure 5:1. Product Breakdown Structure for MILES. The costing was developed according to the
underlying structure of the physical units of the MILES instrument.
The following cross-references apply to the various units:
The ADC concept is described in Section 2.5, with design details and costings given in Section 4.1.
The 3MfR concept is described in Section 2.3, with design details and costings given in Section 4.2.
The Multi-Slit concept is described in Section 2.3.4 and with design details and costings given in
Section 4.3.
The overall Spectrograph concept is described in Section 2.4 and with design details and costings
given in Section 4.
Page : 63/108
February 15, 2006
o
The Collimator concept is described in Section 2.4.1 and with design details and costings
given in Section 4.4.
o
The VPH grating strategy is given in Section 2.4.2 and with design details and costings of
the exchange mechanism given in Section 4.6.
o
The Articulated Camera concept is covered in 2.4.2.
o
The Camera concept is described in Section 2.4.3 and with design details and costings given
in Section 4.8.
o
The Detector concept is covered in 4.9.
The Acquisition and Guide concept has been costed into the program of work but is not covered in the
text.
Page : 64/108
February 15, 2006
5.3 WORK BREAKDOWN STRUCTURE (WBS)
Based on the PBS defined above, we have developed a detailed WBS structure that describes our current
understanding of all work packages required for the design, construction, and commissioning of MILES.
For project-wide consistency, we have based our numbering of this WBS on the established TMT WBS
hierarchy (which establishes TMT.INS.INST.WFOS as a Level 4 WBS element). For clarity, we have
exchanged ‘WFOS’ for ‘MILES’ in this naming convention.
5.3.1 Summary WBS
Expanding upon the PBS defined above, we choose to include additional level-of-effort functions (such as
management, systems engineering, and system integration and testing) to formulate a MILES WBS
appropriate for planning, assignment, and tracking for MILES’ development and construction.
Development of the WFOS science case (including the Operational Concepts Definition Document) is
included in this WBS within the Systems Engineering element, which includes all aspects of requirements
definition and flow-down to the System Functional Requirements and other requirements documents.
WBS
Number
TMT.INS.INST.MILES
TMT.INS.INST.MILES.MAN
TMT.INS.INST.MILES.SYS
TMT.INS.INST.MILES.STRUT
TMT.INS.INST.MILES.ROT
TMT.INS.INST.MILES.ADC
TMT.INS.INST.MILES.MASK
TMT.INS.INST.MILES.3MfR
TMT.INS.INST.MILES.SPEC
TMT.INS.INST.MILES.GUIDE
TMT.INS.INST.MILES.IT
TMT.INS.INST.MILES.COMM
Table 5:1. Level 5 (summary) WBS for MILES.
Title
MILES
MILES Management
MILES Systems Engineering
MILES Structure
MILES Rotator-base
MILES ADC
MILES MASK
MILES 3MfR
MILES Spectrograph
MILES Guiders
MILES Systems Integration & Test
MILES Commissioning
Page : 65/108
February 15, 2006
5.3.2 Detailed Work Breakdown Structure (WBS)
WBS
Number
TMT.INS.INST.MILES
TMT.INS.INST.MILES.MAN
TMT.INS.INST.MILES.MAN.SEN
TMT.INS.INST.MILES.MAN.INS
TMT.INS.INST.MILES.MAN.BUS
TMT.INS.INST.MILES.MAN.SEC
TMT.INS.INST.MILES.SYS
TMT.INS.INST.MILES.SYS.ANAL
TMT.INS.INST.MILES.SYS.ANAL.THERM
TMT.INS.INST.MILES.SYS.ANAL.STRUT
TMT.INS.INST.MILES.SYS.ANAL.SOFT
TMT.INS.INST.MILES.SYS.ANAL.ELEC
TMT.INS.INST.MILES.SYS.ANAL.MECH
TMT.INS.INST.MILES.STRUT
TMT.INS.INST.MILES.STRUT.ANAL
TMT.INS.INST.MILES.STRUT.THERM
TMT.INS.INST.MILES.STRUT.CAP
TMT.INS.INST.MILES.STRUT.CAP.DES
TMT.INS.INST.MILES.STRUT.CAP.FAB
TMT.INS.INST.MILES.STRUT.CAP.IA&T
TMT.INS.INST.MILES.STRUT.MID
TMT.INS.INST.MILES.STRUT.CAP.DES
TMT.INS.INST.MILES.STRUT.CAP.FAB
TMT.INS.INST.MILES.STRUT.CAP.IA&T
TMT.INS.INST.MILES.STRUT.AFT
TMT.INS.INST.MILES.STRUT.AFT.DES
TMT.INS.INST.MILES.STRUT.AFT.FAB
TMT.INS.INST.MILES.STRUT.AFT.IA&T
TMT.INS.INST.MILES.STRUT.COL
TMT.INS.INST.MILES.STRUT.COL.DES
TMT.INS.INST.MILES.STRUT.COL.FAB
TMT.INS.INST.MILES.STRUT.COL.IA&T
TMT.INS.INST.MILES.STRUT.M2
TMT.INS.INST.MILES.STRUT.M2.DES
TMT.INS.INST.MILES.STRUT.M2.FAB
TMT.INS.INST.MILES.STRUT.M2.IA&T
TMT.INS.INST.MILES.STRUT.M3
TMT.INS.INST.MILES.STRUT.M3.DES
TMT.INS.INST.MILES.STRUT.M3.FAB
TMT.INS.INST.MILES.STRUT.M3.IA&T
TMT.INS.INST.MILES.STRUT.TUBES
TMT.INS.INST.MILES.STRUT.TUBES.DES
TMT.INS.INST.MILES.STRUT.TUBES.FAB
TMT.INS.INST.MILES.STRUT.TUBES.IA&T
TMT.INS.INST.MILES.STRUT.M1-B
TMT.INS.INST.MILES.STRUT.M1-B.DES
Title
MILES
MILES Management
MILES Management Senior
MILES Management Instrument-Scientist
MILES Management Business Office
MILES Management Secretarial
MILES Systems Engineering
MILES Systems Engineering Analysis
MILES Systems Engineering Analysis Thermal Analysis
MILES Systems Engineering Analysis Structural Analysis
MILES Systems Engineering Analysis Software Analysis
MILES Systems Engineering Analysis Electrical Design
MILES Systems Engineering Analysis Mechanical Design
MILES Structure
MILES Systems Engineering Analysis
MILES Structure Thermal
MILES Structure Front-Cap
MILES Structure Front-Cap Design
MILES Structure Front-Cap Fabrication
MILES Structure Front-Cap Inspection Acceptance & Test
MILES Structure Mid-bulkhead
MILES Structure Mid-bulkhead Design
MILES Structure Mid-bulkhead Fabrication
MILES Structure Mid-bulkhead Inspection Acceptance & Test
MILES Structure Aft-bulkhead
MILES Structure Mid-bulkhead Design
MILES Structure Mid-bulkhead Fabrication
MILES Structure Mid-bulkhead Inspection Acceptance & Test
MILES Structure Collimator-bulkhead
MILES Structure Collimator-bulkhead Design
MILES Structure Collimator-bulkhead Fabrication
MILES Structure Collimator-bulkhead Inspection Acceptance & Test
MILES Structure M2-bulkhead
MILES Structure M2-bulkhead Design
MILES Structure M2-bulkhead Fabrication
MILES Structure M2-bulkhead Inspection Acceptance & Test
MILES Structure M3-bulkhead
MILES Structure M3-bulkhead Design
MILES Structure M3-bulkhead Fabrication
MILES Structure M3-bulkhead Inspection Acceptance & Test
MILES Structure Tubes-Frame Assembly
MILES Structure M3-bulkhead Design
MILES Structure M3-bulkhead Fabrication
MILES Structure M3-bulkhead Inspection Acceptance & Test
MILES Structure M1-bulkhead Assembly
MILES Structure M1-bulkhead Assembly Design
Page : 66/108
February 15, 2006
TMT.INS.INST.MILES.STRUT.M1-B.FAB
TMT.INS.INST.MILES.STRUT.M1-B.IA&T
TMT.INS.INST.MILES.STRUT.ASSBY
TMT.INS.INST.MILES.STRUT.ASSBY.DES
TMT.INS.INST.MILES.STRUT.ASSBY.ASS
TMT.INS.INST.MILES.STRUT.ASSBY.INT
TMT.INS.INST.MILES.STRUT.ASSBY.TEST
TMT.INS.INST.MILES.ROT
TMT.INS.INST.MILES.ROT.STRUT
TMT.INS.INST.MILES.ROT.STRUT.DES
TMT.INS.INST.MILES.ROT.STRUT.FAB
TMT.INS.INST.MILES.ROT.STRUT.ASSBY
TMT.INS.INST.MILES.ROT.HYDRO
TMT.INS.INST.MILES.ROT.HYDRO.DES
TMT.INS.INST.MILES.ROT.HYDRO.PART
TMT.INS.INST.MILES.ROT.HYDRO.ASSBY
TMT.INS.INST.MILES.ROT.TRACK
TMT.INS.INST.MILES.ROT.TRACK.DES
TMT.INS.INST.MILES.ROT.TRACK.FAB
TMT.INS.INST.MILES.ROT.TRACK.ASSBY
TMT.INS.INST.MILES.ROT.DR-MTR
TMT.INS.INST.MILES.ROT.DR-MTR.DES
TMT.INS.INST.MILES.ROT.DR-MTR.FAB
TMT.INS.INST.MILES.ROT.DR-MTR.ASSBY
TMT.INS.INST.MILES.ROT.DR-MECH
TMT.INS.INST.MILES.ROT.DR-MECH.DES
TMT.INS.INST.MILES.ROT.DR-MECH.FAB
TMT.INS.INST.MILES.ROT.DR-MECH.ASSBY
TMT.INS.INST.MILES.ROT.CNTR
TMT.INS.INST.MILES.ROT.CNTR.DES
TMT.INS.INST.MILES.ROT.CNTR.ASSBY
TMT.INS.INST.MILES.ROT.ELEC
TMT.INS.INST.MILES.ROT.SW
TMT.INS.INST.MILES.ROT.IA&T
TMT.INS.INST.MILES.ADC
TMT.INS.INST.MILES.ADC.DES
TMT.INS.INST.MILES.ADC.STRUT
TMT.INS.INST.MILES.ADC.THERM
TMT.INS.INST.MILES.ADC.L1
TMT.INS.INST.MILES.ADC.L1.DES
TMT.INS.INST.MILES.ADC.L1.PART
TMT.INS.INST.MILES.ADC.L1.IA&T
TMT.INS.INST.MILES.ADC.L1-Cell
TMT.INS.INST.MILES.ADC.L1-Cell.FAB
TMT.INS.INST.MILES.ADC.L1-Cell.IA&T
TMT.INS.INST.MILES.ADC.L1.ASSBY
TMT.INS.INST.MILES.ADC.L2
TMT.INS.INST.MILES.ADC.L2.DES
TMT.INS.INST.MILES.ADC.L2.PART
TMT.INS.INST.MILES.ADC.L2.IA&T
TMT.INS.INST.MILES.ADC.L2-Cell
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
Structure M1-bulkhead Assembly Fabrication
Structure M1-bulkhead Assembly Inspection Acceptance & Test
Structure Assembly
Structure Assembly Design
Structure Assembly
Structure Assembly Integration
Structure Assembly Test
Rotator-base
Rotator-base Structure
Rotator-base Structure Design
Rotator-base Structure Fabrication
Rotator-base Structure Assembly
Rotator-base Hydro-bearings
Rotator-base Hydro-bearings Design
Rotator-base Hydro-bearings Purchase
Rotator-base Hydro-bearings Assembly
Rotator-base Bearing-Track
Rotator-base Bearing-Track Design
Rotator-base Bearing-Track Fabrication
Rotator-base Bearing-Track Assembly
Rotator-base Drive-Motor
Rotator-base Drive-Motor Design
Rotator-base Drive-Motor Fabrication
Rotator-base Drive-Motor Assembly
Rotator-base Drive-Mechanism
Rotator-base Drive-Mechanism Design
Rotator-base Drive-Mechanism Fabrication
Rotator-base Drive-Mechanism Assembly
Rotator-base Control-System
Rotator-base Control-System Design
Rotator-base Control-System Assembly
Rotator-base Elec-Support
Rotator-base Software-Support
Rotator-base Assembly/Integration&Test
ADC
ADC Design
ADC Structural-Analysis
ADC Thermal-Analysis
ADC Lens#1
ADC Lens#1 Design
ADC Lens#1 Purchase
ADC Lens#1 Inspection Acceptance & Test
ADC Lens#1-Cell
ADC Lens#1-Cell Fabrication
ADC Lens#1-Cell Inspection Acceptance & Test
ADC Lens#1 Assembly
ADC Lens#2
ADC Lens#2 Design
ADC Lens#2 Purchase
ADC Lens#2 Inspection Acceptance & Test
ADC Lens#2-Cell
Page : 67/108
February 15, 2006
TMT.INS.INST.MILES.ADC.L2-Cell.FAB
TMT.INS.INST.MILES.ADC.L2-Cell.IA&T
TMT.INS.INST.MILES.ADC.L2.ASSBY
TMT.INS.INST.MILES.ADC.FRAME
TMT.INS.INST.MILES.ADC.FRAME.DES
TMT.INS.INST.MILES.ADC.FRAME.FAB
TMT.INS.INST.MILES.ADC.FRAME.IA&T
TMT.INS.INST.MILES.ADC.FRAME.ASSBY
TMT.INS.INST.MILES.ADC.TRBN
TMT.INS.INST.MILES.ADC.TRBN.DES
TMT.INS.INST.MILES.ADC.TRBN.FAB
TMT.INS.INST.MILES.ADC.TRBN.PART
TMT.INS.INST.MILES.ADC.TRBN.IA&T
TMT.INS.INST.MILES.ADC.TRBN.ASSBY
TMT.INS.INST.MILES.ADC.ROT
TMT.INS.INST.MILES.ADC.ROT.DES
TMT.INS.INST.MILES.ADC.ROT.FAB
TMT.INS.INST.MILES.ADC.ROT.PART
TMT.INS.INST.MILES.ADC.ROT.IA&T
TMT.INS.INST.MILES.ADC.ROT.ASSBY
TMT.INS.INST.MILES.ADC.CNTR
TMT.INS.INST.MILES.ADC.CNTR.DES
TMT.INS.INST.MILES.ADC.CNTR.ELEC
TMT.INS.INST.MILES.ADC.CNTR.SW
TMT.INS.INST.MILES.ADC.CNTR.ASSBY
TMT.INS.INST.MILES.MASK
TMT.INS.INST.MILES.MASK.DES
TMT.INS.INST.MILES.MASK.DES.ELEC
TMT.INS.INST.MILES.MASK.DES.SW
TMT.INS.INST.MILES.MASK.PART
TMT.INS.INST.MILES.MASK.ASSBY
TMT.INS.INST.MILES.3MfR
TMT.INS.INST.MILES.3MfR.M1
TMT.INS.INST.MILES.3MfR.M1.DES
TMT.INS.INST.MILES.3MfR.M1.PART
TMT.INS.INST.MILES.3MfR.M1.IA&T
TMT.INS.INST.MILES.3MfR.M1.ASSBY
TMT.INS.INST.MILES.3MfR.M1.INT&T
TMT.INS.INST.MILES.3MfR.M2
TMT.INS.INST.MILES.3MfR.M2.DES
TMT.INS.INST.MILES.3MfR.M2.PART
TMT.INS.INST.MILES.3MfR.M2.IA&T
TMT.INS.INST.MILES.3MfR.M2.ASSBY
TMT.INS.INST.MILES.3MfR.M2.INT&T
TMT.INS.INST.MILES.3MfR.M3
TMT.INS.INST.MILES.3MfR.M3.DES
TMT.INS.INST.MILES.3MfR.M3.PART
TMT.INS.INST.MILES.3MfR.M3.IA&T
TMT.INS.INST.MILES.3MfR.M3.ASSBY
TMT.INS.INST.MILES.3MfR.M3.INT&T
TMT.INS.INST.MILES.3MfR.GLAO
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
ADC Lens#2-Cell Fabrication
ADC Lens#2-Cell Inspection Acceptance & Test
ADC Lens#2 Assembly
ADC Frame
ADC Frame Design
ADC Frame Fabrication
ADC Frame Inspection Acceptance & Test
ADC Frame Assembly
ADC Trombone
ADC Trombone Design
ADC Trombone Fabrication
ADC Trombone Purchase
ADC Trombone Inspection Acceptance & Test
ADC Trombone Assembly
ADC Rotation
ADC Rotation Design
ADC Rotation Fabrication
ADC Rotation Purchase
ADC Rotation Inspection Acceptance & Test
ADC Rotation Assembly
ADC Control-System
ADC Control-System Design
ADC Control-System Electronics
ADC Control-System Software
ADC Control-System Assembly
MASK
MASK Design
ADC Control-System Electronics
ADC Control-System Software
MASK Purchase
MASK Assembly
3MfR
3MfR M1
3MfR M1 Design
3MfR M1 Fabrication
3MfR M1 Inspection Acceptance & Test
3MfR M1 Assembly
3MfR M1 Integration & Test
3MfR M2
3MfR M2 Design
3MfR M2 Fabrication
3MfR M2 Inspection Acceptance & Test
3MfR M2 Assembly
3MfR M2 Integration & Test
3MfR M3
3MfR M3 Design
3MfR M3 Fabrication
3MfR M3 Inspection Acceptance & Test
3MfR M3 Assembly
3MfR M3 Integration & Test
3MfR GLAO
Page : 68/108
February 15, 2006
TMT.INS.INST.MILES.3MfR.GLAO.DES
TMT.INS.INST.MILES.3MfR.GLAO.IA&T
TMT.INS.INST.MILES.3MfR.GLAO.PART
TMT.INS.INST.MILES.3MfR.GLAO.IA&T
TMT.INS.INST.MILES.3MfR.GLAO.ELEC
TMT.INS.INST.MILES.3MfR.GLAO.SW
TMT.INS.INST.MILES.SPEC
TMT.INS.INST.MILES.SPEC.COL-1
TMT.INS.INST.MILES.SPEC.COL-1.DES
TMT.INS.INST.MILES.SPEC.COL-1.FAB
TMT.INS.INST.MILES.SPEC.COL-1.PART
TMT.INS.INST.MILES.SPEC.COL-1.IA&T
TMT.INS.INST.MILES.SPEC.COL-1.ASSBY
TMT.INS.INST.MILES.SPEC.COL-1.INT&T
TMT.INS.INST.MILES.SPEC.COL-2B
TMT.INS.INST.MILES.SPEC.COL-2B.DES
TMT.INS.INST.MILES.SPEC.COL-2B.FAB
TMT.INS.INST.MILES.SPEC.COL-2B.PART
TMT.INS.INST.MILES.SPEC.COL-2B.IA&T
TMT.INS.INST.MILES.SPEC.COL-2B.ASSBY
TMT.INS.INST.MILES.SPEC.COL-2B.INT&T
TMT.INS.INST.MILES.SPEC.COL-2R
TMT.INS.INST.MILES.SPEC.COL-2R.DES
TMT.INS.INST.MILES.SPEC.COL-2R.FAB
TMT.INS.INST.MILES.SPEC.COL-2R.PART
TMT.INS.INST.MILES.SPEC.COL-2R.IA&T
TMT.INS.INST.MILES.SPEC.COL-2R.ASSBY
TMT.INS.INST.MILES.SPEC.COL-2R.INT&T
TMT.INS.INST.MILES.SPEC.COL-X
TMT.INS.INST.MILES.SPEC.COL-X.DES
TMT.INS.INST.MILES.SPEC.COL-X.FAB
TMT.INS.INST.MILES.SPEC.COL-X.PART
TMT.INS.INST.MILES.SPEC.COL-X.ASSBY
TMT.INS.INST.MILES.SPEC.COL-X.ELEC
TMT.INS.INST.MILES.SPEC.COL-X.SW
TMT.INS.INST.MILES.SPEC.ART
TMT.INS.INST.MILES.SPEC.ART.DES
TMT.INS.INST.MILES.SPEC.ART.FAB
TMT.INS.INST.MILES.SPEC.ART.PART
TMT.INS.INST.MILES.SPEC.ART.ASSBY
TMT.INS.INST.MILES.SPEC.ART.INT&T
TMT.INS.INST.MILES.SPEC.ART.ELEC
TMT.INS.INST.MILES.SPEC.ART.SW
TMT.INS.INST.MILES.SPEC.VPH
TMT.INS.INST.MILES.SPEC.VPH.DES
TMT.INS.INST.MILES.SPEC.VPH.FAB
TMT.INS.INST.MILES.SPEC.VPH.PART
TMT.INS.INST.MILES.SPEC.VPH.IA&T
TMT.INS.INST.MILES.SPEC.VPH.ASSBY
TMT.INS.INST.MILES.SPEC.VPH.INT&T
TMT.INS.INST.MILES.SPEC.VPH.ELEC
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
MILES
3MfR GLAO Assembly
3MfR GLAO Inspection Acceptance & Test
3MfR GLAO WFS
3MfR GLAO Metrology
3MfR GLAO Electronics
3MfR GLAO Software
Spectrograph
Spectrograph Collimator Group-#1
Spectrograph Collimator Group-#1 Design
Spectrograph Collimator Group-#1 Fabrication
Spectrograph Collimator Group-#1 Purchase
Spectrograph Collimator Group-#1 Inspection Acceptance & Test
Spectrograph Collimator Group-#1 Assembly
Spectrograph Collimator Group-#1 Integration & Test
Spectrograph Collimator Group-#2-Blue
Spectrograph Collimator Group-#2-Blue Design
Spectrograph Collimator Group-#2-Blue Fabrication
Spectrograph Collimator Group-#2-Blue Purchase
Spectrograph Collimator Group-#2-Blue Inspection Acceptance & Tes
Spectrograph Collimator Group-#2-Blue Assembly
Spectrograph Collimator Group-#2-Blue Integration & Test
Spectrograph Collimator Group-#2-Red
Spectrograph Collimator Group-#2-Red Design
Spectrograph Collimator Group-#2-Red Fabrication
Spectrograph Collimator Group-#2-Red Purchase
Spectrograph Collimator Group-#2-Red Inspection Acceptance & Test
Spectrograph Collimator Group-#2-Red Assembly
Spectrograph Collimator Group-#2-Red Integration & Test
Spectrograph Col-Exchange Mech.
Spectrograph Col-Exchange Mech. Design
Spectrograph Col-Exchange Mech. Fabrication
Spectrograph Col-Exchange Mech. Purchase
Spectrograph Col-Exchange Mech. Assembly
Spectrograph Col-Exchange Mech. Electronics
Spectrograph Col-Exchange Mech. Software
Spectrograph VPH-Articulation
Spectrograph VPH-Articulation Design
Spectrograph VPH-Articulation Fabrication
Spectrograph VPH-Articulation Purchase
Spectrograph VPH-Articulation Assembly
Spectrograph VPH-Articulation Integration & Test
Spectrograph VPH-Articulation Electronics
Spectrograph VPH-Articulation Software
Spectrograph VPH-Exchange
Spectrograph VPH-Exchange Design
Spectrograph VPH-Exchange Fabrication
Spectrograph VPH-Exchange Purchase
Spectrograph VPH-Exchange Inspection Acceptance & Test
Spectrograph VPH-Exchange Assembly
Spectrograph VPH-Exchange Integration & Test
Spectrograph VPH-Exchange Electronics
Page : 69/108
February 15, 2006
TMT.INS.INST.MILES.SPEC.VPH.SW
TMT.INS.INST.MILES.SPEC.CORR
TMT.INS.INST.MILES.SPEC.CORR.DES
TMT.INS.INST.MILES.SPEC.CORR.FAB
TMT.INS.INST.MILES.SPEC.CORR.PART
TMT.INS.INST.MILES.SPEC.CORR.ASSBY
TMT.INS.INST.MILES.SPEC.CORR.INT&T
TMT.INS.INST.MILES.SPEC.MIRR
TMT.INS.INST.MILES.SPEC.MIRR.DES
TMT.INS.INST.MILES.SPEC.MIRR.FAB
TMT.INS.INST.MILES.SPEC.MIRR.PART
TMT.INS.INST.MILES.SPEC.MIRR.ASSBY
TMT.INS.INST.MILES.SPEC.MIRR.INT&T
TMT.INS.INST.MILES.SPEC.DET
TMT.INS.INST.MILES.SPEC.DET.DES
TMT.INS.INST.MILES.SPEC.DET.FAB
TMT.INS.INST.MILES.SPEC.DET.PART
TMT.INS.INST.MILES.SPEC.DET.PART
TMT.INS.INST.MILES.SPEC.DET.PART
TMT.INS.INST.MILES.SPEC.DET.ASSBY
TMT.INS.INST.MILES.SPEC.DET.INT&T
TMT.INS.INST.MILES.SPEC.FLTR
TMT.INS.INST.MILES.SPEC.FLTR.DES
TMT.INS.INST.MILES.SPEC.FLTR.FAB
TMT.INS.INST.MILES.SPEC.FLTR.PART
TMT.INS.INST.MILES.SPEC.FLTR.ASSBY
TMT.INS.INST.MILES.SPEC.FLTR.INT&T
TMT.INS.INST.MILES.GUIDE
TMT.INS.INST.MILES.GUIDE.SYS
TMT.INS.INST.MILES.GUIDE.SYS.DES
TMT.INS.INST.MILES.GUIDE.SYS.FAB
TMT.INS.INST.MILES.GUIDE.SYS.ASSBY
TMT.INS.INST.MILES.GUIDE.SYS.INT&T
TMT.INS.INST.MILES.GUIDE.SYS.ELEC
TMT.INS.INST.MILES.GUIDE.SYS.SW
TMT.INS.INST.MILES.IT
TMT.INS.INST.MILES.IT.ASSBY
TMT.INS.INST.MILES.IT.ASSBY.DES
TMT.INS.INST.MILES.IT.ASSBY.FAB
TMT.INS.INST.MILES.IT.ASSBY.ASSBY
TMT.INS.INST.MILES.IT.ASSBY.INT&T
TMT.INS.INST.MILES.COMM
.LAB
.FRE
.INS
Table 5:2. Level 7 (detail) WBS for MILES.
MILES Spectrograph VPH-Exchange Software
MILES Spectrograph Camera-Corrector
MILES Spectrograph Camera-Corrector Design
MILES Spectrograph Camera-Corrector Fabrication
MILES Spectrograph Camera-Corrector Purchase
MILES Spectrograph Camera-Corrector Assembly
MILES Spectrograph Camera-Corrector Integration & Test
MILES Spectrograph Camera-Mirror
MILES Spectrograph Camera-Mirror Design
MILES Spectrograph Camera-Mirror Fabrication
MILES Spectrograph Camera-Mirror Purchase
MILES Spectrograph Camera-Mirror Assembly
MILES Spectrograph Camera-Mirror Integration & Test
MILES Spectrograph Detector-System
MILES Spectrograph Detector-System Design
MILES Spectrograph Detector-System Fabrication
MILES Spectrograph Detector-System Purchase
MILES Spectrograph Detector-System Purchase
MILES Spectrograph Detector-System Purchase
MILES Spectrograph Detector-System Assembly
MILES Spectrograph Detector-System Integration & Test
MILES Spectrograph Filter-Exchange
MILES Spectrograph Filter-Exchange Design
MILES Spectrograph Filter-Exchange Fabrication
MILES Spectrograph Filter-Exchange Purchase
MILES Spectrograph Filter-Exchange Assembly
MILES Spectrograph Filter-Exchange Integration & Test
MILES Guiders
MILES Guiders Guide-System
MILES Guiders Guide-System Design
MILES Guiders Guide-System Fabrication
MILES Guiders Guide-System Assembly
MILES Guiders Guide-System Integration & Test
MILES Guiders Guide-System Electronics
MILES Guiders Guide-System Software
MILES System Integration and Testing
MILES System Integration and Testing Assembly (Full)
MILES System Integration and Testing Assembly (Full) Design
MILES System Integration and Testing Assembly (Full) Fabrication
MILES System Integration and Testing Assembly (Full) Assembly
MILES System Integration and Testing Assembly (Full) Integration & Test
MILES Commissioning
Labor
Freight
Insurance
Page : 70/108
February 15, 2006
5.4 PROJECT SCHEDULE
The schedule generated for the MILES project, as shown in Figure 5:2 and Figure 5:3 is highly preliminary.
It is based on a notional time frame for the project milestones, as given in Section 5.1 and takes no account of
the details of the schedule for the project development through the conceptual and detailed design phases. In
order to compress the bulk of the work in the fabrication phase, significant parallel activities will be required
and the funding and resourcing profiles will have to accommodate this. Such parallelization is required in
order to cope with the extensive delivery time constraints for the major procurements; these include the glass
and crystal fabrication and polishing, the piezo-DMs, the large VPHGs and possibility of custom detectors.
5.4.1 Critical Path
MILES represents the development of known technology. While the size of optical elements are at the
extremes that can presently be procured suppliers, as demonstrated in Section 4 and Appendix III (Competitve
Quotes), are willing to quote on such items. It is likely, however, that the critical path will be defined by
delivery of these large optics or possibly the detectors, should we choose to have them customized
specifically to the MILES cameras.
5.4.2 Gantt Chart
A Gantt representation of the notional MILES construction schedule in Figure 5:2 and Figure 5:3 shown
below.
Page : 71/108
February 15, 2006
Figure 5:2. MILES Gantt chart (part 1)
Page : 72/108
February 15, 2006
Figure 5:3 MILES Gantt chart (part 2)
Page : 73/108
February 15, 2006
5.5 COST ESTIMATE
Based upon a WBS that assumes a 4-barrel MILES oriented with its rotation axis horizontally on the
Nasmyth platform, we have developed a Level 7 WBS-based, bottom-up, cost estimate for full
MILES construction. The costs have been arrived at by a careful engineering evaluation of the scope
of work for each WBS element. For the product-based cost analysis, we took into account cost for:
Design labor
Fabrication
Procurement
Inspection and Acceptance Testing labor
Assembly labor
Integration and Test labor
The costing break-down is given in Table 5:3.
WBS Number
Title
TMT.INS.INST.MILES
TMT.INS.INST.MILES.MAN
TMT.INS.INST.MILES.SYS
TMT.INS.INST.MILES.STRUT
TMT.INS.INST.MILES.ROT
TMT.INS.INST.MILES.ADC
TMT.INS.INST.MILES.MASK
TMT.INS.INST.MILES.3MfR
TMT.INS.INST.MILES.SPEC
TMT.INS.INST.MILES.SPEC.COL-1
TMT.INS.INST.MILES.SPEC.COL-2B
TMT.INS.INST.MILES.SPEC.COL-2R
TMT.INS.INST.MILES.SPEC.COL-X
TMT.INS.INST.MILES.SPEC.ART
TMT.INS.INST.MILES.SPEC.VPH
TMT.INS.INST.MILES.SPEC.CORR
TMT.INS.INST.MILES.SPEC.MIRR
TMT.INS.INST.MILES.SPEC.DET
TMT.INS.INST.MILES.SPEC.FLTR
TMT.INS.INST.MILES.GUIDE
TMT.INS.INST.MILES.IT
TMT.INS.INST.MILES.COMM
MILES (Total)
MILES Management
MILES Systems Engineering
MILES Structure
MILES Rotator-base
MILES ADC
MILES MASK
MILES 3MfR
MILES Spectrograph (Total)
MILES Spectrograph Collimator Group-#1
MILES Spectrograph Collimator Group-#2-Blue
MILES Spectrograph Collimator Group-#2-Red
MILES Spectrograph Col-Exchange Mech.
MILES Spectrograph VPH-Articulation
MILES Spectrograph VPH-Exchange
MILES Spectrograph Camera-Corrector
MILES Spectrograph Camera-Mirror
MILES Spectrograph Detector-System
MILES Spectrograph Filter-Exchange
MILES Guiders
MILES Systems Integration & Test
MILES Commissioning
Table 5:3. Cumulative project cost estimates for MILES. Costs include conceptual and preliminary
design phases (beginning in 7/06).
COST
(FY06$K)
53,200
3,600
1,200
600
400
2,700
4,200
10,300
28,000
2,100
4,500
5,800
300
800
4,400
2,900
2,800
4,100
500
1,000
300
700
Page : 74/108
February 15, 2006
The total optics procurement cost is estimated at $1.5M for the ADCs; $2.2M for the 3MfRs and
$14.9M for the spectrographs. Of the latter costs, ~80% are accounted for by the cost of the CaF2
components. Adding to this is ~$3.4M in cost for 32 VPH gratings plus filters, giving a total optical
procurement cost of $22M or, in other words, ~45% of the cost of the whole project. Adding to this
are detector costs and other sundry hardware costs which will bring the ratio of procurement-to-labor
costs at >50%.
This, more than anything else, points to the conclusion that a very effective way of saving cost would
be to descope to a single-barrel version of WFOS. In the case of MILES, this would amount to a
cost savings totaling ~$27M (assuming a reduction to 33%, rather than 25%, of the overall optics and
associated costs).
With additional cost savings coming from a significantly smaller instrument, then a single-barrel
version of MILES (we call it WFOS-petite, as described in the following Section 6) would cost
something short of ~$20M.
Page : 75/108
February 15, 2006
6. WFOS-PETITE: A SINGLE-BARREL VERSION OF MILES
6.1 INTRODUCTION
For seeing-limited science on TMT, a D2 gain may be sub-critical. A factor of ~9 in sensitivity
gain over the 10-m Keck telescopes may not be enough to justify the substantial cost of building
WFOS as presently conceived. While a factor of 9 may appear compelling in an historical
context, it has to be balanced by a number of detrimental considerations. Primary amongst these
are:
The field of view (FoV) of a classical multi-object spectrograph is inversely proportional to
D, all else being equal. FoV, or more specifically object multiplex, is a major component of
metrics that quantify the information gathering capacity of such a spectrograph. This has the
potential for completely negating the D2 advantage.
The cost per night on an ELT is a steep, though poorly quantified, function of D. Such
increased costs will inevitably translate into reduced access for a given science program.
Unless seeing-limited spectrographs for TMT are scaled, at great cost, both in beam-size and
FoV, to mitigate these factors, the science they can do is likely, in many cases, to be eclipsed by
the current 8-10m telescopes.
It is a fact, however, that D2 sensitivity gains in the UV/optical, outside the wavelength régime
where AO-correction has limited effectiveness, are themselves significant and hence such
arguments cannot be used to rule out seeing-limited, multi-object spectrographs for ELTs
completely. Nevertheless it is clearly imperative that great care be taken to optimize these
facilities through appropriately targeted strategies and through harnessing the unique attributes
that ELTs have to offer.
6.2 THE D4 ADVANTAGE
In the simplest terms, object flux is D2 while the spatial resolving power at the diffraction limit,
DL (=D/) D. It is clear, therefore, that sky-background flux ( D.DL2 is independent of D
and hence sensitivity is D4. This assumes, however that the observations are sky-background
noise limited and, more critically, that the objects under study are unresolved at the diffraction
limit (DL). Neither of these assumptions are universally valid and hence let us look more closely
at the SNR derivations.
It is immediately apparent that there are two cases to be considered; the spatially resolved (SNRR)
and spatially unresolved (SNRUnR) case. Hence:
SNRR = (.D2.. -2 . { [.D2.. -2] + [SBg.D2.. -2] + [NDe.]}-½
(1)
while:
SNRUnR = (.D2. . { [.D2.] + [SBg.D2.. -2] + [NDe.]}-½
(2)
where: is the object flux; is the exposure time; SBg is back-ground flux; NDe is the detector
noise.
Page : 76/108
February 15, 2006
The 3 bracketed noise terms in the denominators are from object, sky-background and detector.
Here the long exposure (faint object) limit is assumed where the detector noise (read plus dark) is
taken as approximately proportional to exposure time, .
From equations (1) & (2) we can construct the following matrix (Table 6:1).
Noise condition
Source-limited
Sky-limited
Detector-limited
Spatially …
Resolved
Unresolved
Resolved
Unresolved
Resolved
Unresolved
SL
D2
D2
D2
D2
D4
D4
Spatial Resolving Power
Transition
DL
D0
D2
D0
D4
D0
D4
Table 6:1 SNR dependences on aperture, D, as a function of noise conditions and spatial resolution. The
extremes of spatial resolution at the seeing-limit (SL) and diffraction-limit (DL) are given.
Table 6:1 clearly demonstrates that the D4 advantage is not universally confined to the diffractionlimit (DL). Also, at the DL, the index N varies over the full range from 4 to 0. For the purposes
of clarity we limit ourselves to the faint object case and hence ignore the source-limited régime.
In this context, it is useful to define a critical spatial resolving power, C, (= D/C) where C
(<1) defines the value of C where detector noise (NDe) and sky-background noise (SBg.D2. -2)
are equal. Table 6:1 can thus be summarized as follows:
When > C (including DL, where =1): Observations of spatially resolved objects go as
D0, whereas observations of faint, spatially unresolved objects go as D4.
At the seeing-limit (SL): All observations go as D2, unless they are detector-noise limited
(eg: at very high dispersion) where they go as D4.
A natural question then arises: What spectroscopic conditions define the critical spatial resolving
power, C, which itself defines the transition from a SL to DL dependency? Clearly the balance
between detector noise (NDe) and sky-background noise (SBg.D2. -2), at which C is defined, is a
function of system and observational noise parameters but, once these are defined, C is
principally a function of spectral resolution.
Page : 77/108
February 15, 2006
As an example, let us assume the following spectroscopic parameters for both UV/Optical and
NIR observations:
Telescope Aperture = 30m
Detector read-noise: (CCD) = 2.5e- (rms) ; (HCT) = 7e- (rms)
Dark-count: (CCD) = 0.001 Hz/pixel ; (HCT) = 0.02 Hz/pixel
Pixel-size: (CCD) = 15m ; (HCT) = 18m
Binning: (CCD) = Optimal defined by Nyquist sampling ; (HCT) = No binning
Camera speed limit slower than f/2 (otherwise 2-pixels per spectral element)
Anamorphism = 1
System efficiency: (B,V,R,I) = 30% ; (U,J,H,K) = 20%
Integration time = 4 hours with 8 detector reads
Standard values for sky background flux
For such parameters we can now calculate the value of C (or the corresponding C) as a function
of spectral resolution (R) as given in Figure 6:1; while Figure 6:2 shows the variation in C as a
function of wavelength () for a particular spectral resolution, R=4,000. With reference to Table
6:1, one way of interpreting Figure 6:2 is to recognize that, for faint spatially unresolved objects,
the critical spatial resolving power, C, defines the transition from a D2 to a D4 dependency. For
the case of TMT, assuming standard spectroscopic parameters (as listed above) and a spectral
resolution of R~4,000, critical spatial resolutions of typically 100mas are indicated. Significantly
coarser than this, one is in a sky-background noise, D2, régime while significantly finer than this,
one is in a detector noise, D4, régime. Now for TMT, a 100mas spatial resolution (at ~ 1m) is
equivalent to C ~0.07 and hence is a very long way from the diffraction-limit (DL). The notion
that D4 science is the exclusive preserve of the diffraction limit is therefore quite inappropriate.
Page : 78/108
February 15, 2006
Spatial Resolution (mas)
Background limits
300
R~4,000
R~4
,000
250
U-band
V-band
I-band
H-band
200
150
100
50
0
0.00
2.00
4.00
6.00
Log(R)
Figure 6:1 In this plot the ordinate (or y-axis) defines C in terms of spatial resolution (in mas) for a range
of spectral resolving powers (R) for four photometric bands.
Spatial Resolution (mas)
Critical Spatial Resolution at R=4000
180
160
140
120
100
80
60
40
20
0
0.000
2-pixel
2-pixel
sampling
1-pixel
1-pixel
sampling
0.500
1.000
1.500
2.000
2.500
Wavelength (um)
Figure 6:2 As in Figure 1, the ordinate defines C in terms of spatial resolution (in mas) but now for a
fixed spectral resolution (R=4,000) for all wave-bands from U through K. The improvement in spatial
resolution (C) obtained in the case of under-sampled spectral information (eg: 1-pixel per spectroscopic
slit) is highlighted.
Page : 79/108
February 15, 2006
6.3 SEEING-LIMITED SCIENCE ON TMT:
We have demonstrated in the above analysis that it is not necessary to achieve the diffractionlimit in order to be in the D4 science régime; a factor of ~10 coarser spatial resolution may be
sufficient in many circumstances however, in order to achieve such intermediate s, near-DL
adaptive optics (such as promised through techniques such as MOAO) may be sufficient.
Nevertheless, seeing-limited, UV/Optical, spectroscopy at intermediate (R~5,000) spectral
resolution is firmly in the D2 régime even if enhanced through some variant of Ground-layer AO.
So how can it be defended?
It is an undeniable fact that UV/Optical spectroscopy on TMT is scientifically compelling,
however in order to justify a significant investment in such instrumentation we are required to
optimize sensitivity, object multiplex and FoV in a manner which takes maximum benefit from
the increased aperture while being affordable in the context of a telescope whose main advantages
lie towards the DL régime. Furthermore such SL instrumentation is simultaneously required to
be maximally efficient for single object spectroscopy. One way of achieving such ends is to take
advantage of the simplest AO configuration (SLGLAO). As demonstrated in our Section 3.3.3
very significant sensitivity enhancements (factors >5) can be achieved in good atmospheric
turbulence conditions, well in advance of the more normally invoked GLAO. Indeed, in
exceptional circumstances improvements down into the UV can be achieved. Most importantly
however, the FoV over which such corrections can be effected is directly proportional to D. Thus
SLGLAO is uniquely suited to TMT and we conclude that seeing-limited spectroscopy should be
configured to allow for such correction when the atmospheric conditions permit.
6.4 CONCLUSIONS
In attempting to balance the significant investment foreseen in WFOS with realistic expectations
of its gains in the context of existing 8-10m telescopes, as analyzed in Section 6.2, we feel it
necessary to examine the arguments for de-scoping some of its more grandiose ambitions. What,
in the SRD requirements as repeated below, are negotiable in the context of optimizing the
inherent gains afforded by a 30m aperture?
WFOS requirements summary:
a.
b.
c.
d.
e.
f.
g.
Wavelength range: 0.31 – 1.0µm (required); 0.3 – 1.3µm (goal)
Field of view: 75 arcmin2 (required), 300 arcmin2 (goal)
Total slit length: ≥ 500”
Image quality: ≤ 0.2” FWHM over any 100nm wavelength interval
Spatial sampling: < 0.15”/pixel (required); < 0.1”/pixel (goal)
Spectral resolution: R0.75 <5000 for 0.75” slit (required); R0.75 <6000 (goal)
Throughput: ≥ 30% from 0.31 – 1.0µm
Page : 80/108
February 15, 2006
In examining the Detailed Science Case for WFOS several relevant messages emerge:
UV coverage is a priority;
There is a strong case for preserving, if not increasing, the spectral resolution requirement;
For faint spatially resolved targets, slit-width/resolution product should not be sacrificed;
Throughput is, always, a premium.
With regard to the latter point, it is clear that WFOS represents the only facility that is capable of
delivering maximally efficient UV/Optical, intermediate dispersion, spectroscopy for TMT. As
such it should be capable of utilizing, to a maximal extent, all technological developments that
can lead to throughput enhancement, not just as averaged over a wide-field but also for single
object work. TMT is likely to be the largest telescope on the planet for at least a decade; for its
efficiency, for targeted single object work, to be compromised through the requirement for a wide
field is an issue that should be studied very carefully in the context of the science that can be
achieved on smaller rival telescopes.
Such an analysis leads us to the following conclusions:
i.
Awaiting the arrival of an AM2 will unfortunately delay any modest GLAO efficiency
gains for an instrument which is expecting to occupy a large fraction of TMT’s available
sky time in the first few years. On the other hand a first-light SLGLAO capability on
MILES will give dramatic gains in SNR for objects within ~2’ of the field center while
being no less efficient than classically GLAO (using AM2) at the periphery of the field;
ii.
In a fiscally constrained environment the investment in instrumentation should be
weighted to give TMT maximal competitive advantage. The analysis in Section 6.2
demonstrates that great care should be taken to make sure that seeing-limited TMT
facilities such as WFOS should be optimized for work that will remain unique to its
large aperture.
One possible way of balancing the cost/performance trade for WFOS is therefore to de-scope
field of view; clearly a 4-barrel concept is begging for such a trade. We have therefore examined
the cost of such a de-scope on the assumption that the TMT Science Advisory Committee would
countenance a ~5’ FoV (with consequent loss of object multiplex) rather than its current ~10’
FoV, as defined in the SRD. The cost savings have been estimated from the costing analysis
presented in Section 5.5. The dominant optics costs have been reduced by a factor of 3 (rather
than 4) in order to take account of supplier tooling costs. Furthermore, no account has been taken
to estimate the cost reduction coming simply from the massive reduction in the scale of the
instrument; rather we have taken our procurement and labor estimates from the PBS analysis
factoring appropriately. Nevertheless the full-up cost of a single-barrel MILES (referred to here
as WFOS-petite) is significantly less than $20M, a figure we feel appropriately balances cost with
performance for a WFOS instrument on TMT.
Another attractive feature of such a single-barrel WFOS-petite that Caltech’s COO team can
hardly ignore, is that fact that the expensive and complex 3MfR focal-reducer system, required
for off-axis use in the MILES 4-barrel concept, can be replaced with a simple, all-spherical, 1:1
Offner relay. Just such a relay has been designed for Caltech’s TiPi instrument with all the laser
guide star and deformable mirror infrastructure required for SLGLAO. The MILES spectrograph
Page : 81/108
February 15, 2006
would have to be modified to operate at f/15 rather than f/7.5 and hence the multi-slit masks
would be physically twice the size. While the spectrograph collimator would also have to
accommodate the larger linear field, an ~800mm diameter fused silica front element is not
impractical; the remaining collimator and camera optics, while being re-optimized, are of roughly
the same dimensions as in the MILES prescription.
An outline sketch of our WFOS-petite instrument, as interfaced with the TiPi Offner relay and
with a preliminary optical design from Damien Jones, is shown in Figure 6:3. While the
instrument is still very long, given the need to accommodate the slower f-ratio while retaining the
beam-size, it rotates now about a vertical axis thus simplifying greatly the mechanical flexure
issues. It is also shown protruding through the Nasmyth platform (a possibility earlier invoked by
the HIA’s WFOS team for similar reasons); this may or may not be acceptable to the TMT’s
telescope project. If not, other configurations of both the Offner and WFOS-petite may have to
be considered.
Finally and most importantly, being now an f/15 system, WFOS-petite does not need the Offner
relay when doing simple, non-AO assisted observations. By flipping the 45° fold mirror so that it
directs the light down into the Nasmyth basement rather up to the Offner relay and by rolling
WFOS-petite beneath it to the new optical axis, a seeing-limited version of the instrument is
created which no longer has to suffer the reflection losses imposed by the Offner’s 3-mirror train.
We get the best of both worlds; a pure seeing-limited instrument which accept the native f/15
Nasmyth focus and a SLGLAO-compensated instrument for use when the atmospheric and
observing conditions are favorable.
WFOS-petite thus represents our vision for the way ahead for WFOS on the TMT. It is
compliant with all aspects of the WFOS requirements except for field of view; its throughput
performance is optimized not just for seeing-limited work but through use of the SLGLAO
facility when appropriate; its cost is in-scale with a seeing-limited facility on a 30m telescope;
and it shares very significant AO infrastructure with IRMOS, should Caltech’s TiPi concept be
chosen. We rest our case.
Page : 82/108
February 15, 2006
45° flip
mirror
3-mirror
Offner
relay
GLAO
DM
LGS
Dichroic
ADC
Collimator
Articulated
Camera
Figure 6:3 A sketch of WFOS-petite showing one (red) ADC barrel of MILES, a 45° fold to the vertical
axis, the 3-mirror Offner relay, the dichroic LGS splitter and one (yellow) barrel of the MILES
spectrograph shown protruding below the Nasmyth platform. The bottom “box” represents the space for
the camera articulation; the whole of the (yellow) spectrograph, including this “box”, rotates on a vertical
axis underneath the stationary Offner relay, mitigating the otherwise serious flexure issues associated with
a horizontal mount.
Page : 83/108
February 15, 2006
7. REFERENCES
Taylor K. (1997) “Spectroscopic Techniques for Large Optical/IR Telescopes” Instrumentation
for Large Telescopes (IAC Winter School Series: ed. J. M. Rodriguez Espinosa, A.Herrero and
F.Sanchez), publ. CUP, p123.
1
2
Swain et al. 2004, SPIE 5499
3
http://www.nasatech.com/Briefs/Mar04/NPO30580.html
Page : 84/108
February 15, 2006
Goodman Laboratory Technical Report
8. APPENDIX I (VPH GRATINGS)
VPH Gratings in the MILES Spectrograph
J. Christopher Clemens
UNC Physics and Astronomy
Chapel Hill, NC 27599
8.1 VPH GRATINGS IN THE CONTEXT OF 30 METER TELESCOPES
There are two “scale mismatch” problems facing the designer of optical instruments
for 30 meter telescopes. The first is the mismatch between the f/15 plate scale and the
natural size of pixels in a charge-coupled device (CCD). At the focal plane a pixel
subtends only about 7mas, and this imposes a requirement for large demagnification
factors in re-imaging systems if they are to avoid excessive over-sampling of the
expected point spread function. The result is inevitably the specification of a camera
with near unity f-ratio.
The second mismatch is between the spatial frequency of optical gratings and the
enormous pupils that will be required to reach respectable resolutions. The total number
of grooves that must be illuminated can exceed 106, a number difficult or impossible to
rule by mechanical means. The solution is to rely upon optically recorded devices,
particularly volume phase holographic (VPH) gratings. These can mitigate some of the
problems, but are not a panacea. In this section we discuss the benefits and limitations
that must be considered in designs that employ VPH gratings.
It is helpful to review some of the relevant constraints regarding the use of VPH
gratings
1. At optical wavelengths, the difficult regime for VPH gratings is on the low density
(300-450 l/mm) end, because efficient gratings become too thick to produce easily. This
is especially true in the UV.
2. VPH gratings work near Littrow, which means they do not introduce large
anamorphic factors. Consequently, their use is best suited for cameras having minimal
central obscuration.
Page : 85/108
February 15, 2006
Goodman Laboratory Technical Report
3. VPH gratings can reach high dispersions, but the high working angles required cause
a de-phasing of the two polarization states and consequently lower efficiencies. For a
fixed pupil size, VPH resolving power depends only on the working angle (see discussion
below), so there is an efficiency penalty for increasing the resolving power by increasing
the grating angle.
4. The efficiency envelope of VPH gratings changes with incident angle. In multiobject spectrographs, slits that are not aligned with the field center can illuminate the
grating at significantly different angles, resulting in poor efficiency curves off-axis.
5. The largest monolithic gratings currently produced are about 350 mm. Larger
gratings must be mosaics, and will introduce pupil obscuration at the joints between
segments. The size of this obscuration will be no less than the projected thickness of the
glass at the largest working angle, and may be even larger.
Together, the advantages and the limitations of VPH gratings define a state space that
is conditioned by the imposed spectrograph specifications into a fitness landscape. While
it is generally no trouble to find an acceptable maximum on this landscape, it is also
possible that small changes in key specifications can reform the landscape into one with
far higher maxima, representing better and more cost-effective designs. Thus it is highly
unlikely that a set of specifications drafted on science requirements alone will result in an
optimum solution incorporating VPH gratings. For this reason, it is wise to leave the
specifications soft until the design spaces are well-explored. This is a principle that the
OCDD-based approach to specification does not emphasize strongly enough.
This report is a supplement to the MILES costing study commissioned by the TMT
project. Its purpose is to assess the baseline design with respect to its use of VPH
technology, and to further assess whether modifications to the design might result in
significant cost savings or performance enhancements.
8.2 THE IMPORTANCE OF THE MAXIMUM WORKING ANGLE
The grating equation in Littrow, which is also the Bragg equation, represents the
optimum or near-optimum working angle for a specific choice of VPH grating period and
central wavelength.
m (sin( ) sin( )),
.
Its derivative with respect to the output angle gives the angular dispersion:
Page : 86/108
February 15, 2006
Goodman Laboratory Technical Report
cos( ) .
Reciprocating this and multiplying by yields an expression for the resolving power R:
R
.
cos( )
But if we assume first order operation at Littrow ( = ), we can substitute the grating
equation to find:
R
2 tan( )
.
Thus the resolving power achieved for the slit-limited case, which is typically the
relevant one for optical spectrographs, depends only upon the (angular) slit width and the
grating working angle . Consequently, the choice of maximum allowable working
angle is as important as pupil size in defining maximum VPH spectrograph resolution
(collimator pupil size appears implicitly in the above equation as a component of slit
width dIt is clear then, that the most significant trade in VPH spectrograph design is
between pupil size and maximum allowable working angle
The penalty for increasing R by enlarging the pupil is higher cost, while the penalty
for increasing R by using larger incident angle is lower efficiency. The relevant costs are
generally familiar to designers of opto-mechanical systems, but the efficiency losses have
not previously been quantified. Rigorous coupled wave analysis (RCWA) of various
model diffraction gratings shows that peak efficiency also scales solely with working
angle. Figure 1 below presents the RCWA-derived values for the peak efficiency as a
function of incident angle . It is possible to design narrow bandwidth gratings (Dickson
gratings) that circumvent these efficiency losses, but these are not general purpose
devices and we do not consider them in this study.
Page : 87/108
February 15, 2006
Peak Efficiency
Goodman Laboratory Technical Report
100
98
96
94
92
90
88
86
84
82
80
15
25
35
45
Grating Angle
Figure 8:1: The drop in VPH efficiency maxima at large working angle due to polarization effects.
Surface reflection losses are not included.
An additional efficiency loss associated with the higher working angles arises because
at a fixed wavelength, higher line density is required to achieve the same resolving
power. Higher line density makes the grating bandwidth narrower. This effect is shown
in figure 2 for two different trades between pupil size and maximum working angle. In
this example the system demagnification was kept constant, i.e. the collimator and
camera focal lengths were changed by the same fraction. The average efficiency
degradation in this example is about 50% greater than the decrease in peak efficiency (a
15 % loss rather than 10%).
Page : 88/108
February 15, 2006
Goodman Laboratory Technical Report
Figure 8:2: Efficiency curve for a 400 mm pupil WFOS at maximum working angle of 37 degrees
(1800 l/mm grating, blue line) and the same curve for a 300 mm pupil WFOS at a maximum working
angle of 45 degrees (2120 l/mm grating, red line). The bars denote typical CCD coverage, which is
the same in each case because the camera f ratio was held constant.
There is one more significant item, particular to VPH gratings, that must be
considered in the trade between pupil size and working angle. Decreasing the pupil size
also linearly increases the field angle at the collimator exit pupil, which increases the
wavelength shift in efficiency envelopes for off-axis targets. In imaging spectrographs
there is no danger that the efficiency maximum will shift off the edge of the CCD,
because it must still obey the Bragg condition and the camera usually accepts greater
field angles than the collimator in the dispersion direction. The danger is that the
efficiency will be reduced to unacceptable values for stars near the edge of the field. This
is unlikely for high working angles, because the peak efficiencies change slowly with
angle. Indeed RCWA experiments confirm that at maximum resolution, performance at
the field edge is only mildly degraded, and comparable for all reasonable choices of pupil
size. However, for low line density gratings, the efficiency maximum is a sensitive
function of field angle, and the peak efficiency can be substantially reduced for objects
near the field edge. Here, smaller pupils gain the advantage because at comparable
resolutions they have higher line densities and therefore less sensitivity to input angles.
Moreover, they can reach lower resolutions before falling out of the thick grating limit,
perhaps eliminating the need to switch to ruled reflection gratings for low dispersion
work.
Page : 89/108
February 15, 2006
Goodman Laboratory Technical Report
8.3 ASSESSMENT OF THE MILES CONCEPT
With the context just provided, it is now possible to assess the MILES concept more
intelligently. The temptation is often to push the pupil size to its maximum conceivable
value to get the highest resolving power. However, larger pupils incur stiff penalties in
cost, weight, and complexity. For VPH spectrographs, they also degrade performance at
the low resolution end, which may be a significant problem. A more sensible approach is
to design the simplest and smallest spectrograph that meets the requested specifications.
This is standard we will apply to the MILES concept.
On the front end, MILES has an ADC followed by four 3-Mirror focal reducers that
divide the field into fourths, and enable ground layer adaptive optics corrections. Unless
the GLAO system allows consistently narrower slits, thereby relaxing the pupil-size vs.
maximum working angle requirements, its presence is neutral to VPH driven design
trades, and must be judged on some other basis that lies beyond the scope of this
document.
The focal reducer feeds a (de-magnified) focal plane where slits are placed, and
afterwards the light passes into 3000 mm collimators, producing 400 mm collimator exit
pupils. The f/1.2 cameras reduce the scale to 0.086”/pixel and incorporate 3kx6k
detectors covering a 4.33’ field of view. As table 1 shows, this design reaches the
required resolving power of 5000 at a maximum working angle of 35 degrees. This
spares the additional 10-15% loss that would be incurred by working at 45 degrees, while
keeping the option to reach R ~7500 at lower throughput.
Line density (l/mm)
400
600
1200
1800
2400
3000
maximum alpha (degrees)
pupil size (mm)
focal length camera (mm)
imaging scale ("/mm)
imaging scale ("/pix)
0.75" res. element (mm)
0.75" res. Element (pix)
imaging field (3k x 3k)
central wavelength at
blue end (6k red end (6k wavelength
maximum alpha
angular dispersion
resolving power R detector)
detector)
coverage
2.87
2.05
5131.14
2.67
3.05
0.38
1.91
1.37
5131.14
1.78
2.04
0.25
0.96
0.68
5131.14
0.89
1.02
0.13
0.64
0.46
5131.14
0.59
0.68
0.08
0.48
0.34
5131.14
0.45
0.51
0.06
0.38
0.27
5131.14
0.36
0.41
0.05
35
400
480
5.725
0.086
0.131
8.734
4.294
Table 8:1: Summary data for 400 mm pupil MILES configuration at maximum working angle of 35
degrees. The resolving power at this angle is ~5000. The low line density gratings do not function in
this regime.
Page : 90/108
February 15, 2006
Goodman Laboratory Technical Report
The MILES camera is a Schmidt design that vignettes less than 4% of the field.
Additional vignetting of perhaps 1-2% will come from the requirement that the gratings
be fabricated as mosaics with masked borders between the individual segments.
The gratings proposed for MILES and their theoretical efficiency curves are shown in the
figures below. We have conservatively assumed for the purposes of this study that the
thinnest practical DCG layer is 5 microns.
Figure 8:3: 3000 l/mm grating necessary to achieve highest resolutions at the UV/blue end of the
instrument bandpass. The curves represent the efficiencies at working angles 33-45 degrees (from
left to right) in increments of 3 degrees. The CCD coverage (not shown) is about 50 nm at this
dispersion. This grating is 5 microns thick with a 0.035 variation in the refractive index.
Page : 91/108
February 15, 2006
Goodman Laboratory Technical Report
Figure 8:4: 2400 l/mm grating shown at angles from 25 to 45 degrees (left-to-right) in 5 degree
increments. The vertical bars show the edge of the CCD for the 35 degree curve. The other curves
have comparable wavelength coverage. This grating is 5 microns thick with 0.050 index variation.
Figure
Figure 8:5: 1800 l/mm grating shown at angles from 25 to 45 degrees (left-to-right) in 5 degree
increments. The vertical bars show the edge of the CCD for the 35 degree curve. This grating is 5
microns thick with 0.085 index variation.
Page : 92/108
February 15, 2006
Goodman Laboratory Technical Report
Figure 8:6: Efficiency curves for blue blazed and red blazed 1200 l/mm gratings. The blue lines are
angles of 10-25 degrees for a 5 micron grating with 0.05 index modulation. The red lines are angles
25-40 degrees for a 5 micron grating with 0.1 index modulation.
Figure 8:7: 600 l/mm blue grating at angles from 5-17 degrees in increments of 2 degrees. This
grating is 9 microns with a modulation of 0.03. The greater thickness is necessary for efficient
scattering at low line density in the blue.
Page : 93/108
February 15, 2006
Goodman Laboratory Technical Report
Figure 8:8:600 l/mm red grating at angles from 11-17 degrees in increments of 2 degrees. This
grating is 5 microns with a modulation of 0.09.
Page : 94/108
February 15, 2006
Goodman Laboratory Technical Report
Figure 8:9: 350 l/mm grating that works efficiently over the entire instrumental bandpass. The
angles shown are 4, 6, 8, and 10 degrees, with CCD edges shown for the 6 degree case. This example
also illustrates how the efficiency drops for 2 degree field angle changes (equivalent to 1.7’ offset
from center field), and demonstrates that MILES will have good performance even for objects near
the field edge. It also shows that MILES will no require reflection gratings at low density.
Page : 95/108
February 15, 2006
Goodman Laboratory Technical Report
8.4 POSSIBLE CHANGES TO THE MILES CONCEPT DESIGN
The MILES concept meets or exceeds all significant specifications for a TMT WFOS
instrument. In this section we ask what changes, if any, might be made either to optimize
the design or to reduce its cost.
Should the pupil size be increased?
Increasing the pupil size would not result in MILES fulfilling any specification it does
not already meet. A larger pupil would increase the grating efficiency only marginally (~
5%) at fixed resolving power by allowing smaller working angles. It would also allow
resolving powers far in excess of the specifications. Since the gratings required are
already 2x2 mosaics, they would not become any more complex or expensive until they
reached ~700 mm size. Nonetheless, the entire instrument would grow larger, heavier,
and considerably more expensive as the pupil size increased. A 400 mm pupil is already
cutting-edge in astronomy, the modest gains possible by further enlargement do not
appear to warrant the extra cost and complexity. Moreover, a larger pupil spectrograph
would sacrifice efficiency and wavelength coverage at the low resolution end, and might
require alternative dispersers for the low resolution, broad wavelength modes.
Should the pupil size be decreased?
It is possible to shrink the pupil somewhat and still maintain the specified resolution
without exceeding working angles of 45 degrees. Table 2 shows that a 300 mm pupil
coupled with grating angles of 45 degrees reaches R=5500, exceeding the baseline
specification. Moreover, pupil sizes below ~308 mm allow the use of monolithic
gratings instead of mosaics, thus removing one difficult technology and saving
approximately 2.5 million dollars for a 4-barrel system with 8 gratings in each
spectrograph. Finally, the low resolution VPH gratings would yield better efficiency and
greater spectral coverage by operating at higher angles (for fixed resolving power).
However, figure 9 demonstrates that MILES is already a competent instrument using
VPH gratings at low dispersion.
Page : 96/108
February 15, 2006
Goodman Laboratory Technical Report
Line density (l/mm)
400
600
1200
1800
2400
3000
central wavelength at
blue end (6k red end (6k wavelength
maximum alpha
angular dispersion
resolving power R detector)
detector)
coverage
3.54
1.77
5496.02
3.30
3.74
0.44
2.36
1.18
5496.02
2.20
2.49
0.29
1.18
0.59
5496.02
1.10
1.25
0.15
0.79
0.39
5496.02
0.73
0.83
0.10
0.59
0.29
5496.02
0.55
0.62
0.07
0.47
0.24
5496.02
0.44
0.50
0.06
maximum alpha (degrees)
pupil size (mm)
focal length camera (mm)
imaging scale ("/mm)
imaging scale ("/pix)
0.75" res. element (mm)
0.75" res. Element (pix)
imaging field (3k x 3k)
45
300
360
5.725
0.086
0.131
8.734
4.294
Table 8:2: Summary data for 300 mm pupil MILES configuration at maximum working angle of 45
degrees.
Unfortunately, shrinking the pupil also has some ill effects. It decreases efficiency at
the highest resolutions by 10-15% (see figures 1 and 2). It also increases the relative
obscuration inside the Schmidt camera from ~ 4% to ~7%. However, if the smaller
camera aperture allows an all refracting design, such as proposed by Epps, this might
eliminate the central obscuration entirely, mitigating the other efficiency losses. A
refracting camera might also eliminate the need for a curved CCD and would certainly
reduce the size of the largest CaF2 element. Finally, the reduction in weight and size that
comes with the reduced pupil would lower both price and risk in the mechanical support
structure.
8.5 CONCLUSIONS
In its current form, the MILES spectrograph concept has negotiated the design trades
very well. It has proved possible to design an attractive, all-VPH complement of gratings
that deliver superb performance at resolving powers up to 5000, and can reach 7500 at a
10-15% reduction in efficiency as long as the mechanical option to articulate the camera
to 90 degrees is retained. There are no compelling VPH-based arguments for adding cost
and complexity by enlarging the pupil, and are even reasons not to do so based on low
resolution performance. These would have to be studied more carefully to reach firm
conclusions.
One possible change that may be worth investigating is the reduction of the pupil to a
size below 308 mm, which would allow the use of currently-available monolithic VPH
gratings. This option should only be considered if the commensurate reduction in camera
aperture allows a change to a lower risk refracting design without central obscuration. A
~300 mm pupil instrument will not be able to reach resolving powers in excess of the
baseline specifications without serious compromises in efficiency and additional
mechanical complexity.
Page : 97/108
February 15, 2006
Goodman Laboratory Technical Report
As an alternative to reducing the pupil size, the MILES team may wish to study the
feasibility of funding improvements to existing VPH production facilities. An increase in
the size of holographic exposure optics and the materials handling facilities might return
dividends for significant purchases.
PRIME OPTICS
17 Crescent Road
EUMUNDI Q 4562
AUSTRALIA
TMT WFOS 4-Barrel
Competitive Quotations
9. APPENDIX II (OPTICS PRINCIPLES)
9.1 PREAMBLE
This document is a description of the generic principles behind the Caltech TMT WFOS
proposal. A preliminary optical design is presented.
9.2 OPTICAL PRINCIPLES
9.2.1 Telescope
An aplanatic Gregorian telescope with an f/1 primary delivers an f/15 image on a convex
image surface at its Nasmyth focus. A concave object surface is thus presented to downstream
optics. This is a very favorable situation for balancing these optics’ residual field curvature.
The telescope image surface is divided into 4 square “panes” of area 18.75 square arc minutes
each. The “frame” between the “panes” is 3 arc minutes “thick” so as to eliminate overlap in
the downstream optics. The centre of the “window” so formed coincides with the vertex of the
telescope image surface.
9.2.2 Focal Reducer
Page 98
Telephone :
Facsimile :
+61-7-5442 8831 Local Time :
+61-7-5442 8804 EMail :
UT + 10
Prime_Optics@bigpond.com
PRIME OPTICS
17 Crescent Road
EUMUNDI Q 4562
AUSTRALIA
TMT WFOS 4-Barrel
Competitive Quotations
An asymmetric Offner configuration (3MfR) with anamorphic figuring on each of its 3
mirrors (M1, M2 & M3) delivers an f/7.5 near-telecentric focus on a convex image surface of
radius 2 meters.
The 3MfR is a special case of a TMA (triple-mirror anastigmat) in an asymmetric Offner-like
configuration. If M2 (of curvature c2) is stipulated to be the internal pupil then the system can
be made naturally telecentric with a magnification of m (-1 < m < 0). m is chosen here to be
-1/2.
Thus M1 (of curvature c1) is positioned such that its center of curvature coincides with the
centre of its object surface (here a “pane” on the telescope focal surface). M2 is placed at the
standard focal point of M1; or half the distance backwards towards M1's centre of curvature.
Similarly, it is also at the standard focal point of M3 (of curvature c3) which has -1/m times
the curvature of M1. A telecentric output is delivered by M3 with a focal point at its own
centre of curvature. A paraxial schematic is shown below in Figure 1.
Page 99
Telephone :
Facsimile :
+61-7-5442 8831 Local Time :
+61-7-5442 8804 EMail :
UT + 10
Prime_Optics@bigpond.com
17 Crescent Road
EUMUNDI Q 4562
AUSTRALIA
PRIME OPTICS
TMT WFOS 4-Barrel
Competitive Quotations
Figure 1 : 3MfR paraxial schematic
In an ideal world, the input to the 3MfR would be telecentric on a flat field. This is far from
the case with the TMT. The telescope pupil is imaged onto M2 by adjusting the power of M1
whilst the object field curvature is compensated within the 3MfR itself. This is achieved by
changing the curvature of M2 and the back focal length (t4). Fortunately, the magnification of
the system is independent of c2 and is, in fact, inversely proportional to the product of c3 and
y2 viz.:
m 1/c3 y2
Page 100
Telephone :
Facsimile :
+61-7-5442 8831 Local Time :
+61-7-5442 8804 EMail :
UT + 10
Prime_Optics@bigpond.com
PRIME OPTICS
17 Crescent Road
EUMUNDI Q 4562
AUSTRALIA
TMT WFOS 4-Barrel
Competitive Quotations
where y2 is the paraxial marginal ray height at M2.
It can be shown that, for a resultant flat image field :
c2 = c1 + c3 - Pc1
where P = cT /2 c1 ; and cT is the curvature of the input object surface.
The back focal length, t4 , is given by:
t4 = m t1 (1 + 2mP)
where t1 is the front focal length (refer to Figure 1) which is fixed at the radius of curvature of
M1.
The resultant image field curvature can be tailored to match downstream optics by including
its value in cT when calculating P.
Thus we can make the 3MfR produce an f/7.5 output on a convex image surface of radius 2
meters.
It is conceivable that the internal stop on M2 can be used as an adaptive optic.
9.2.3 Collimator
The now concave object surface presented by the 3MfR is ideal for a dioptric collimator with
a focal length of around 2 – 3 meters. Such is the case here. A collimator pupil diameter of
400 mm is chosen which, with an f/7.5 input, implies a focal length of 3 meters.
2 positive groups form the collimator: one close to the object, the other close to the stop. The
group closest to the object is common to both blue (310 – 560 nm) and red (560 – 1000 nm)
wavebands. The group closest to the stop is swapped for each band.
Page 101
Telephone :
Facsimile :
+61-7-5442 8831 Local Time :
+61-7-5442 8804 EMail :
UT + 10
Prime_Optics@bigpond.com
PRIME OPTICS
17 Crescent Road
EUMUNDI Q 4562
AUSTRALIA
TMT WFOS 4-Barrel
Competitive Quotations
High-quality panchromatic coverage is not possible with a single optic because there are only
2 materials that transmit adequately at 310 nm and that are available in large chunks: Calcium
Fluoride and fused Silica; and these are not well-matched chromatically.
9.2.4 Camera
A panchromatic f/1.2 Schmidt configuration is used to image onto a curved detector. It has a
doublet aspheric corrector plate and a weak field corrector. The field coverage is
approximately twice that of the field presented for imaging to allow for spectroscopy.
9.3 OPTICAL PRESCRIPTION
The optical prescription is presented as a multi-configuration file in ZEMAX format. There
are 4 configurations for each “pane” in the “window” in star-space.
9.4 OPTICAL PERFORMANCE
The average imaging performance at the camera focal surface is slightly better than ¼ arcsec
RMS diameter. The predominant system property limiting this performance is the curvature
of the telescope focal surface. This in turn is strongly dependent on the speed of the primary.
9.5 REMARKS
A “4-barrel” WFOS proposal delivers better than 0.25 arcsecond RMS imagery over a 75
square arc minute field presented by an f/15, 30 meter telescope.
Page 102
Telephone :
Facsimile :
+61-7-5442 8831 Local Time :
+61-7-5442 8804 EMail :
UT + 10
Prime_Optics@bigpond.com
PRIME OPTICS
17 Crescent Road
EUMUNDI Q 4562
AUSTRALIA
TMT WFOS 4-Barrel
Competitive Quotations
The system is amenable to adaptive optics correction in each of its 4 arms and can perform
multi-object spectroscopy.
There is no atmospheric dispersion compensation although previous work indicates an
adequate performance can be obtained with a direct vision doublet prism (DVDP) upstream of
the telescope focus but still within the envelope of the instrument itself. A later revision of
the design will incorporate such an ADC.
Page 103
Telephone :
Facsimile :
+61-7-5442 8831 Local Time :
+61-7-5442 8804 EMail :
UT + 10
Prime_Optics@bigpond.com
17 Crescent Road
EUMUNDI Q 4562
AUSTRALIA
PRIME OPTICS
TMT WFOS 4-Barrel
Competitive Quotations
10. APPENDIX III (COMPETITVE QUOTES)
Caltech WFOS ROM Costings
Version 1.0, 13 February 2006
Damien Jones, Prime Optics
(opticsfx@bigpond.net.au)
(djaj@astro.caltech.edu)
10.1
PREAMBLE
These ROM costings returned in response to a request broadcast in December 2005. All but one returned
just in time (i.e. February 10); the exception being a reply within 48 hours from LightWorks Optics.
Coincidentally, this ROM cost was also the lowest, at least on those parts other than those using Calcium
Fluoride (CaF2).
All the costings include the bare finished optics, including coatings, delivered.
Page 104
Telephone :
Facsimile :
+61-7-5442 8831 Local Time :
+61-7-5442 8804 EMail :
UT + 10
Prime_Optics@bigpond.com
PRIME OPTICS
17 Crescent Road
EUMUNDI Q 4562
AUSTRALIA
TMT WFOS 4-Barrel
Competitive Quotations
10.2
THE QUOTES
10.2.1 Tinsley (Quotation no. 2069)
Rich Goeden obtained this quote in March 2004 and it would probably be more or less the same in today’s
money. The quote was for the 3 3MfR mirrors and is an interesting comparison with some of the other
quotes.
Contact details are:
Clayton R Sylvester (Sales/Contracts), TINSLEY
4040 Lakeside Drive, RICHMOND CA 94806-1963
Tel (510) 222 8110
10.2.2 Saint-Gobain Crystals
Saint-Gobain are quoting on the manufacture of the CaF2 blanks and hence all the other quotations hinge
on this as they are the only manufacturer with the capacity to make blanks of the required size. Thus their
quote meshes in neatly with the rest.
Contact details are:
Jeff Rioux, Product Manager (Gov't / Military / Aerospace)
Saint-Gobain Crystals
Tel: (603)-673-5831 ext 309
www.photonic.saint-gobain.com
Page 105
Telephone :
Facsimile :
+61-7-5442 8831 Local Time :
+61-7-5442 8804 EMail :
UT + 10
Prime_Optics@bigpond.com
PRIME OPTICS
17 Crescent Road
EUMUNDI Q 4562
AUSTRALIA
TMT WFOS 4-Barrel
Competitive Quotations
10.2.3 Goodrich-Danbury
Goodrich-Danbury quoted on all the components except for the camera mirror and those containing CaF2.
There was no breakdown of the total ROM costing so I have split the total into reasonable proportions and
shown these values in the Table. They also did not include the material cost of the fused Silica so I have
added this in at USD0.7/cm3.
Contact details are:
Warren C. Wilczewski (Manager, Contracts)
Goodrich Corporation, Danbury, CT 06810
Tel (203) 797 5572
warren.wilczewski@goodrich.com
10.2.4 SAGEM DS
SAGEM quoted for entire subsystems and also neglected all the components in the camera. However, their
estimates can still be compared in groups. I used an exchange rate of USD1.21/€1.00.
Contact details are:
Frédéric ADELAÏDE, Product Manager, Sagem Défense Sécurité
Optronics & AirLand Systems Division, REOSC
Tel +33 1 69 89 76 41 / +33 6 23 64 73 18
Email : frederic.adelaide@sagem.com
10.2.5 SAGEM Défense Sécurité
Etablissement de Saint-Pierre-du-Perray - Département REOSC
Avenue de la Tour Maury
91 280 Saint Pierre du Perray
FRANCE
Page 106
Telephone :
Facsimile :
+61-7-5442 8831 Local Time :
+61-7-5442 8804 EMail :
UT + 10
Prime_Optics@bigpond.com
PRIME OPTICS
17 Crescent Road
EUMUNDI Q 4562
AUSTRALIA
TMT WFOS 4-Barrel
Competitive Quotations
10.2.6 LightWorks Optics
LightWorks Optics replied very quickly, stating that they had recently had experience with a similar sized
set of optics (at least some of the mirrors) and hence were in touch with approximate costs and risks. I
used a volumetric cost of USD0.7/cm3 again for fused Silica to augment their rather sketchy estimates so
that they could be compared readily with the others. They did not want to make a commitment on the
CaF2 components nor on M1 because this was bigger (by about 400 mm) than their equipment could
handle.
Again, based on the sketchy estimates, I have included a cost for the camera mirror, CM2, as this was
absent from all the other quotes.
Contact details are:
Dan Barber (Business Development) LightWorks Optics
14242 Chambers Road, TUSTIN CA 92780
Tel (714) 247 7109
Email : dbarber@lwoptics.com
10.3
REMARKS
Saint-Gobain and Goodrich-Danbury were communicating independently regarding the manufacture and
finishing of the CaF2 components.
It would seem prudent to spread the work between these two and LightWorks Optics, whose estimates for
the remaining optics are less by at least 50%, in some cases. It is quite likely that LightWorks Optics is a
more flexible outfit than either TINSLEY, Goodrich-Danbury or SAGEM and furthermore is located in
California.
Page 107
Telephone :
Facsimile :
+61-7-5442 8831 Local Time :
+61-7-5442 8804 EMail :
UT + 10
Prime_Optics@bigpond.com
17 Crescent Road
EUMUNDI Q 4562
AUSTRALIA
PRIME OPTICS
TMT WFOS 4-Barrel
Competitive Quotations
No attempt has been made to estimate a total for a single manufacturer as none quoted for the entire job.
However, it is possible to mix and match (those subtotals marked with a ‘+’ in the Table) and make an
“educated guess” at a ROM costing for the finished optics, delivered, of USD18.2M.
Component
Q’ty
TINSLEY
St. GOBAIN
GOODRICHDANBURY
SAGEM DS
LIGHTWORKS
OPTICS
ADC/TP/1
2
-
-
+340
ADC/TP/2
2
-
-
ADC/BT/1
2
-
-
ADC/BT/2
2
-
-
+370
M1
4
3719
-
+1200(est)
M2
4
648
-
M3
4
1807
-
CL1
4
-
-
1050
+370
CL2
4
-
+1516
-
-
CL3/1/B
4
-
+1732
-
-
CL3/2/B
4
-
-
1050
CL3/3/B
4
-
+2096
-
CL3/1/R
4
-
+2584
-
-
CL3/2/R
4
-
-
1050
+380
CL3/3/R
4
-
+2096
-
-
CM1/1
4
-
-
1525
-
+345
CM1/2
4
-
+2120
-
-
-
CM2 (mirror)
4
-
-
-
-
+500
CM 3
4
-
+460
-
-
-
4460
5000
3750
2660
+340
+370
+331
+689
6050
+380
-
Page 108
Telephone :
Facsimile :
+61-7-5442 8831 Local Time :
+61-7-5442 8804 EMail :
UT + 10
Prime_Optics@bigpond.com