Rain Attenuation Retrieval Using Surface Reference Technique and
advertisement

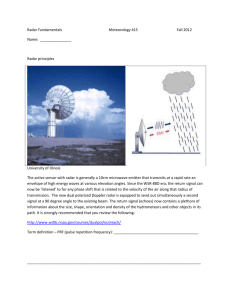
Rain Attenuation Retrieval Using Surface Reference Technique and the NASA ER-2 Doppler Radar Data E. Verónica Morales-Irizarry Graduate Student, University of Puerto Rico at Mayagüez Jessenia Merced-González Undergraduate Student, University of Puerto Rico at Mayagüez Sandra Cruz-Pol University of Puerto Rico at Mayagüez Abstract 1. Introduction caused by rain. We will use the surface reference technique (SRT) to correct the For years airborne weather radar attenuation. The SRT estimate the path systems have been used to study integrated attenuation (PIA) through rain mesoscale convective systems (MCS) and from the decrease in the surface return other mesoscale and cloud-scale (Iguchi et el. 1994). PIA denotes the twophenomena. These radars have provided way attenuation to the surface expressed an important tool to help understand the in units of decibels (Iguchi et al. 2000). kinematic and dynamical aspects of In the following sections we are MCSs, such as the importance of the rear going to describe in details the data used, inflow jet, mesoscale up- and downdrafts, the EDOP radar system, the surface the sustenance of anvil precipitation, etc. reference technique, and the results (Heymsfield et al. 1996). The Doppler obtained. radar is an instrument that can detect tracers of wind and measure their radial 2. Description velocities in clear and inside heavy rainfall regions. In this paper we are going to The data was taken during the describe information recollected by the Cirrus Regional Study of Tropical Anvils NASA ER-2 Doppler radar (EDOP). It is and Cirrus Layers - Florida Area Cirrus mounted on the high altitude NASA ER-2 Experiment (CRYSTAL-FACE) on July 29, aircraft, and makes use of a nadir pointed 2002 with the EDOP radar system. This radar beam and a radar beam pointed experiment is a measurement campaign approximately 33.5º forward of nadir. that investigates the physical properties of Reflectivity and Doppler information are the tropical cirrus cloud and their formation received from both antennas, the nadir processes. The understanding of the and the forward. production of upper tropospheric cirrus In this paper we used the reflectivity taken clouds is very important because is by the nadir antenna. essential for the modeling of the Earth’s Reflectivity is the expected climate. backscattering cross section per unit The EDOP radar is an X-band volume. Using the reflectivity measured in radar with two fixed radar beams: one the storm we can retrieve the attenuation Fig. 1 EDOP measurement concept in the observed surface cross section from pointed at nadir and the other pointed the reference value is assumed to be a approximately 33.5º forward of nadir result of the two-way attenuation along the (Fig.1) (Heymsfield et al. 1996). propagation path (PIA). Reflectivity and Doppler information is The PIA for each beam is then used as a received from both antennas, but for this limiting condition in an attenuation paper we are going to use the data taken correction algorithm (Iguchi and Meneghini by the nadir pointed antenna. It have an 1994). antenna beam width of 3º in the vertical The SRT development has focused and horizontal directions. For an altitude of over the ocean because it has a well20 km, which is the flight altitude of the known, and relatively constant, microwave ER-2, the footprint of EDOP at the surface reflection. Only few studies have been is approximately 1 km. The ER-2 has a developed over land because at incidence ground speed of 210 m/s and the data angles near-nadir the radar cross-section system uses an integration period of 0.5 s. of land surface can be highly variable. In a The transmit pulse is 0.5 µs and the gate cloud free region over the ocean the spacing is over sampled at intervals of surface echo at nadir incidence has 37.5 m. The general specifications of the fluctuations of 1 dB while the nadir echo EDOP radar system are given in Table 1 over land becomes highly variable with a (Heymsfield et al. 1996). standard deviation of 4 dB. The The SRT algorithm uses the radar variability of surface echo along a flight cross section of the ocean surface as a track limits the minimum PIA that can be means of estimating the path integrated observed. attenuation. In the SRT an initial value is determined for the radar cross section of a 3. Process rain-free area in relatively close proximity The data was taken on July 29, to the rain cloud. During subsequent 2002 beginning at 18:01 and finishing at observations of precipitation any decrease 18:11 UTC. The flight track is from longitude -82.49, latitude 26.51 to longitude -81.65, latitude 26.32. In Fig. 2 shows the flight track of the ER-2 and flight tracks of other aircrafts during that date. Table 1. EDOP System Specifications Fig.2 Flight tracks on July 29, 2002. C | K |2 Pr ( r ) Z m (r) r2 (1) where Zm(r) is the apparent measured radar reflectivity factor and is given by r Zm (r) Z(r)exp0.2 ln 10 k(s) ds 0 (2) and When there is attenuation, the radar equation becomes K m 2 1 m 2 2 . (3) Where pr is the received power, r is the range from the radar, C is the radar constant, m is the complex index of refraction of the precipitating particles. r k(s) ds 0 K(s) is the attenuation rate and is the total attenuation from range 0 to r. The “path integrated attenuation” (PIA) in the attenuation to the surface, given by rs 0 k(s) ds where rs is the range to the surface (Iguchi and Meneghini 1994). When the attenuation is negligible, Z(r)=Zm(r) and the rainfall rate can be estimated by using the relationship Z-R. If the objective is to attain a reasonable beamwidth with a small antenna, the wavelength used in an airborne radar must Z (r ) C1 m s qSrs be short and, therefore, the rain will Zrs attenuate the signal. In that case is (9) S ( r ) needed to solve equation (2) for the where s is defined by rs unknowns Z(r) and k(r) for a given function Zm(r) (Iguchi and Meneghini 1994). S(rs) Z m (s) ds 0 (10) 3.1 Surface Reference Technique (SRT) Substituting (9) into (5), we get PIA can be estimated by the 1/ surface reference technique by the Zm (rs) decrease in the surface return. If k(r) is Zt Z m r q[Srs Sr] Z r k Z ( r ) s . related to Z(r) by and is constant in range, equation (2) can be written as follows: (11) As Defining as du d rs ln Z m ( r ) q 0 u dr dr As exp 0.2 ln 10 k ds (4) 0 , (12) u Z ( r ) where and q=0.2ln10. A then Z (r ) general solution for this can be A s m s Z rs , (13) 1 / Z ( r ) Z m ( r ) C1 qS ( r ) Z rs (5) where is a constant and the solution can be written as C 1 / where 1 is an arbitrary constant, and Z t Z m r A s q[ S rs S r ] S ( r ) . (14) is defined by r (Iguchi and Meneghini 1994). S(r) Z m (s) ds This method can be called as “final value 0 (6) method and it uses the PIA as the single r 0 If is given that the initial condition at condition to choose the solution. is Z ( r) Z m ( r) . (7) 3.2 Path Integrated Attenuation (PIA) C1 Then becomes 1. This corresponds to Let PIA denote the two way the Hitschfeld-Bordan solution: r r attenuation to the surface ( s ) 1 / expressed in units of decibels, that is Z HB ( r ) Z m ( r ) 1 qS ( r ) . (8) Z (r ) PIA 10 log 10 m s 10 log10 A s Zrs (Hitschfeld-Bordan 1954) , (15) If the final condition on Z(r) is given at (Iguchi et al. 2000). (align these symbols with other text as The SRT gives an independent estimate of r r C r=rs) s , then 1 (should be as C1, also PIA. This PIA is denoted by PIAsr. This check similar cases in the paper) must technique assumes that the decrease of satisfy the following condition: the apparent surface cross section is caused by the propagation loss of radar signal by rain (Meneghini et al. 2000): 0 0 PIA SR 0 no rain rain . (16) 0 no rain In the later equation indicates the average of the surface cross section in rain-free conditions for a given incidence angle. This decrease of the surface cross 0 section is denoted by and expressed in decibels. We want to obtain the best estimate 0 PIA e of PIA, denoted , from and . by Then introduce an attenuation correction Fig. 3 Reflectivity factor . With this attenuation correction Z factor, e (the attenuation-corrected), can be calculated at all ranges by (Iguchi and Meneghini 1994) Z m r Ze r 1/ r 1 q Z m s ds 0 . (17) 0 If the surface reference is taken to be exact and if we set PIA e PIA SR 0 , the correction factor is given by s 1 10 where is defined as 0 attenuation /10 , q 0 Zm s ds (18) rs . Fig. 4 Reflectivity vs altitude over the ocean no precipitation (19) 4. Discussion and Conclusion The flight track of the NASA ER-2 starts over the ocean and finishes over land. There is no rain over ocean until 20 km Fig. 4, that is why there is no reflectivity profile, because there is no rain to reflect. After 20 km begins a high precipitation region. The following figures show the profile of the reflectivity from the data. Fig. Shows Fig. 5 Reflectivity vs. altitude over the the reflectivity profile over the ocean ocean with precipitation without precipitation. This is the region Li, L., S. M. Sekelsky, S. C. Reising, C. T. Swift, S. L. Durden, G. A. Sadowy, S. J. Dinardo, F. K. Li, A. Huffman, G. Stephens, D. M. Babb, H. W. Rosenberger, 2001: Retrieval of atmospheric attenuation using combined ground-based and airborne 95-GHz cloud radar measurements. J. Atmos. Oceanic technol., 18, 1345-1353. Meneghini, R., 1978: Rain-rate estimates for an attenuating radar. Radio Sci., 13, 459-470. Skofronick, G., J. Wang, G. Heymsfield, Fig. 6 Reflectivity vs altitude over land with R. Hood, W. Manning, R. precipitation Meneghini, and J. Weinman, 2003: Combined radiometer-radar 5. References microphysical profile estimations with emphasis on high frequency Doviak, R., and D. S. Zrnic, 1983: Doppler brightness temperature Radar and Weather Observations. observations. J. Meteor., 42, 4762d ed. Academic Press, 562 pp 487. Heymsfield, G., S. W. Bidwell, I. J. Caylor, Ulaby, F. T., R. K. Moore, and A. K. Fung, S. Ameen, S. Nicholson, W. 1981: Microwave remote Sensing. Boncyk, L. Miller D. Vandemark, P. Vol. 1. Addison-Wesley, 456 pp. E. Racette, and L. R. Dod, 1996: http://cloud1.arc.nasa.gov/cgiThe EDOP radar system on the bin/view_quicklook.cgi?/Flight_Trac high-altitude NASA ER-2 aircraft. J. ks Atmos. Oceanic technol., 13, 795809. Hitschfeld, W., and J. Bordan, 1954: Errors inherent in the radar measurement of rainfall at attenuating wavelengths. J. Meteor., 11, 58-67. Iguchi, T., R. Meneghini, 1994: Intercomparison of single-frequency methods for retrieving a vertical rain profile from airborne or spaceborne radar data. J. Atmos. Oceanic technol., 11, 1507-1616. Iguchi, T., T. Kozu, R. Meneghini, J. Awaka, K. Okamoto, 2000: Rainprofiling algorithm for the TRMM precipitation radar. J. Appl. Meteor., Vol. 39, 2038-2052.