5 - Department of Mechanical and Nuclear Engineering
advertisement

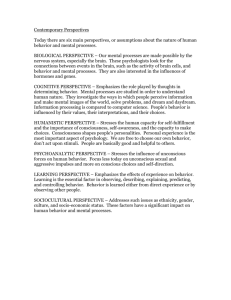
1 Chapter 6. Elasticity 6.1. Introduction ............................................................................................................ 2 Notation for stresses ................................................................................................ 4 Displacements and Strains ...................................................................................... 5 6.2. Equilibrium Conditions .......................................................................................... 7 6.3. Stress-Strain Relations .......................................................................................... 9 Young’s modulus and Poisson’s Ratio ..................................................................... 9 Microscopic Origins of Young’s Modulus and Poisson’s Ratio ................................. 9 Complete Stress-Strain Relations .......................................................................... 12 Elastic energy density ............................................................................................ 15 6.4. Membrane Stresses in Cylinders and Spheres.................................................. 16 Thin-Wall Cylinders and Spheres ........................................................................... 16 Thick-wall Cylinders ............................................................................................... 18 Spherical Shapes ................................................................................................... 21 6.5. Thermal Stresses ................................................................................................. 22 Axially Symmetric Cylindrical Geometry ................................................................. 24 Pellet Expansion .................................................................................................... 26 Pellet Cracking ....................................................................................................... 26 Thermal Stress Parameter ..................................................................................... 27 Problems ...................................................................................................................... 28 References ................................................................................................................... 29 Light Water Reactor Materials, Draft 2006 © Donald Olander and Arthur Motta 2/17/2016 1 2 6.1. Introduction Within this book’s confines to the reactor pressure vessel and the associated piping and the fuel rods in the core, only a limited portion of the theory of elasticity needs to be addressed. When a force, or load, is applied to a solid, the body changes shape and perhaps size. These changes are called deformations. The objective of stress analysis is to quantitatively relate loads and deformations. Elasticity theory deals with deformations sufficiently small to be reversible; that is, the body returns to its original size and shape when the load is removed. Within this range, the distances between atoms in the solid, or, alternatively, the atom-atom bonds, are stretched or compressed, but are not broken. In order to remain in the elastic range, the fractional changes in interatomic distances (on a microscopic scale) or in the body’s gross dimensions (on a macroscopic scale) must be less than a percent or so. When loads or deformations exceed the elastic range, the changes in shape of the body are not recovered when the load is removed. This type of irreversible deformation is termed plastic deformation. On a microscopic level, atomic bonds are broken and reformed between different atoms than the original configuration. Plastic behavior of solids is treated in subsequent chapters. Instead of load (or force) and deformation, elasticity theory utilizes the related quantities stress and strain. Stresses are forces per unit area acting on internal planes in the body and strains are fractional deformations of the body. Figure 6.1a shows a rod of cross sectional area A attached to a rigid lower plate and acted upon by an upward force F at its top. All planes perpendicular to the rod’s axis experience the same force. Imagine removal of the portion of the rod above plane a-a in the figure. The normal stress on this plane is: n = F/A (6.1) The stress is called normal if it acts in the direction perpendicular to the plane. To determine the sign of the stress requires reference to a set of orthogonal coordinate axes such as that shown in the figure. The surface is positive if its outward normal points in the direction of a positive coordinate axis. The normal stress is positive if it also acts in the same direction. The load F in Fig. 6.1a generates a positive normal stress on plane a-a. This stress tends to pull atomic planes apart and is termed tensile. If the force F were reversed, the normal stress would act downward on surface a-a and would tend to squeeze the atoms in the solid together. Such a stress is called compressive. Thus, tensile stresses are positive and compressive stresses are negative. In Fig. 6.1b, the force is in the direction perpendicular to the rod axis. The stress Light Water Reactor Materials, Draft 2006 © Donald Olander and Arthur Motta 2/17/2016 2 3 F x y n z a a s F b 's 'n b (a) Fig. 6.1 (b) Normal and Shear Stresses is generated in the internal surface rather than perpendicular to the surface. Such a stress is termed a shear stress: s = F/A (6.2) The sign convention for shear stresses is the same as for normal stresses; the shear stress is positive if it acts on a surface with a positive normal in a positive coordinate direction. Shear stresses are produced in a body loaded purely by external normal forces if the internal surface normal is tilted by an angle > 0 with respect to the axis of the applied stress. Surface b-b in Fig. 6.1a represents such a surface. The area of this surface is A’ = A/cos and the resolved component of the applied force along the plane b-b is F’ = Fcos(/2 - ) = Fsin. The shear stress on b-b is: σ s F / A (F / A) sin θ cos θ 0.5σ n sin( 2 θ ) (6.3a) The resolved normal stress component on b-b is: σ n σ n cos 2 θ (6.3b) Equation (6.3a) shows that the shear stress due to normal loading of the rod is largest at = 45o and has a magnitude equal to one half of the applied normal stress. The maximum normal stress on oblique planes naturally occurs at = 0. A similar decomposition of the shear force F in Fig. 6.1b on an oblique plane would produce results analogous to those given by Eqs (6.3). These results are important in many aspects of stress analysis of structures; whether or not the applied Light Water Reactor Materials, Draft 2006 © Donald Olander and Arthur Motta 2/17/2016 3 4 load is purely normal or purely shear relative to a coordinate axis, arbitrarily-oriented planes in the body will experience both normal and shear stress components. Stresses are generated in structures in a number of ways, which include: 1. Externally applied loads (Membrane stressses) - mechanical loads represented by the discrete force F in Fig. 6.1. This type of loading is the basis of the uniaxial tensile test used to measure many mechanical properties of metals. - Different pressures of a fluid (gas or liquid) on opposite faces of a structure. An example of this type of loading is the high pressure of water or steam in the primary system of a LWR. Components subject to this pressure loading are the primary system piping and the reactor pressure vessel. - Reaction forces due to connection of a particular structure to its supports and to other components of a complex mechanical system. For example, the lower grid plate of a LWR supports the weight of hundreds of fuel assemblies. In this case, the stresses are induced by gravity. 2. Thermal Stresses Stresses are generated when the expansion of a heated body is restrained. This topic is treated in detail in Sect. 6.6. 3. Residual Stresses This type of stress arises from two principal sources - fabrication of a component: Fabrication processes such as cold working (reduction in cross-sectional area by passing between dies) introduce internal stresses in the finished piece. These stresses remain during operation unless the piece is annealed at high temperature prior to use. - Welding of two components: welding involves melting of a metal, and introduces large thermal stresses in the adjacent metal that does not melt (called the “heat-affected zone”). These stresses persist in the cooled piece and are supplemented by additional stresses arising from the solidification and cooling of the weld. . Notation for stresses In general, any point within a solid subjected to one or more of the loads just enumerated may possess as many as six components of stress. Three are normal and three are shear. It is obvious that the simple designation n for normal stresses and s for shear stresses needs refinement in order to cover complex stress patterns. The convention is as follows: stress components are denoted with respect to the orthogonal coordinate system by which they are described (x, y, z for Cartesian; r, , z for cylindrical; r, , for spherical). The stress components are labeled i j, where i is the plane on which the stress component acts and j is its direction. The stress labeled n in Fig 6.1a is properly denoted by xx: it acts on the y-z plane, which is called the x plane after the direction of its normal; the stress component acts in the same direction, so the second subscript is also x. All normal stresses bear the generic designation ii, Light Water Reactor Materials, Draft 2006 © Donald Olander and Arthur Motta 2/17/2016 4 5 which is often shortened to i, with the understanding that the stress component acts on the i plane in the i direction. In situations where the type of stress component is obvious, subscripts are often entirely dispensed with. There are at most three normal components of the stress state at a point. Proper designation of shear stress components cannot be reduced to a single subscript because i and j in ij are always different. The shear stress s in Fig. 6.1b should be written as xz because the stress acts on the x plane and in the z direction. Equilibrium of the moments in a stressed solid require that ij = ji so that there at most three shear components of the general state of stress. Displacements and Strains In what follows, definitions and derivations are given for two-dimensional Cartesian coordinates (i.e., x and y). This done in order to minimize the complexity of the theory. Extensions to three dimensions or to other coordinate systems are stated without proof. Displacements are changes in the position of a point in a body between the unstressed and stressed states. Strain is a fractional displacement. In common with stresses, displacements and strains come in two varieties, normal and shear. Figure 6.2a shows the normal displacements u and v in the x and y directions, respectively, of a body subjected to a normal force acting uniformly on both horizontal surfaces. The original dimensions of the piece are Lo and wo. The solid rectangle represents the stress-free solid and the dashed rectangle is its shape following application of the axial force. The displacement u (positive) corresponds to the outward movement of the horizontal surfaces and the displacement v (negative) represents the shrinkage of the body’s sides. ] F u Lo (a) Normal v F (b) Shear Lo v F wo Fig 6.2 Displacements in a stressed body The strains in the x and y directions are defined as the fractional displacements: Light Water Reactor Materials, Draft 2006 © Donald Olander and Arthur Motta 2/17/2016 5 x y 6 x = u/Lo y = v/wo (6.4) The magnitudes of u and v vary linearly with the original dimensions but the strains x and y are independent of Lo and wo. The point (or in this case, the plane) selected to follow the displacement need not be an outer surface; displacements and strains of interior points are defined in the same manner. Figure 6.2b shows a shear displacement v resulting from a force F acting on the side of the body only at a distance Lo from the fixed bottom. The shear strain is defined as the ratio of these two perpendicular lengths: xy = v/Lo (6.5) The two-digit subscript notation has been used – shear movement occurs on the plane normal to the x axis and in the y direction. An alternative definition of shear strain is the angular distortion of an initially rectangular section. In Fig. 6.2b, this is the angle between the dashed slanted line and the vertical solid line. In this triangle, tan = v/Lo, or because is small (so that deformations remain in the elastic range), = v/Lo. Comparison of this result with Eq (6.5) shows that xy = . The strain definitions of Eqs (6.4) and (6.5) need to be generalized for use when the displacements u and v are functions of position. Figure 6.3 shows how this is done. C B A B dx A O a) normal x dx O D dy C y b) shear Fig. 6.3 Diagrams of nonuniform deformations The solid rectangles are the original shapes and the dashed figures represent the deformed shapes. Figure 6.3a shows a normal deformation in the x direction. The original length of the body OB is taken to be a differential element dx. Upon application of a normal stress, the displacement of the bottom surface is OA = u. The displacement of the upper surface is BC = u+(u/x)dx, assuming that the body is continuous. The strain in the x direction, x, is the change Light Water Reactor Materials, Draft 2006 © Donald Olander and Arthur Motta 2/17/2016 6 7 in length, (OB+BC-OA) – OB, divided by the initial length OB. Expressing the lengths by their equivalents in terms of u, u/x, and dx yields: ε x u x (6.6a) A similar analysis for the y direction gives: ε y v y (6.6b) Generalization of the shear strain definition is accomplished with the aid of Fig. 6.3b. For simplicity, the lower left hand corners of the original and deformed figures are superimposed at point O, which is equivalent to setting u = v = 0 at this point. Also, the corners B and D of the deformed figure are taken to lie on the sides of the original shape. With these simplifications, AB = (v/x)dx and tan = AB/dx = v/x. Also, CD = (u/y)dy and tan = CD/dy = u/y. Since xy = + , ε ε xy yx u v y x (6.7) The analogous formulas for the normal strains in cylindrical coordinates with angular symmetry (i.e., / = 0) are: ε r ur r εθ ur r ε z uz z (6.8) For spherical geometry with spherical symmetry (i.e., / = 0, / = 0) ε r ur r ε θ ε φ ur r (6.9) In these equations, ur is the radial displacement, is the polar angle, and is the azimuthal angle. 6.2. Equilibrium Conditions The so-called equilibrium conditions of elasticity theory are consequences of Newton’s third law: for a body subject to forces to remain stationary, the sum of the forces acting on it must be zero. This condition applies to all volume elements in a stressed body, and provides relations between stress components. Figure 6.4 provides Light Water Reactor Materials, Draft 2006 © Donald Olander and Arthur Motta 2/17/2016 7 8 stressed body, and provides relations between stress components. Figure 6.4 shows the basis for deriving the x-direction force balance for a two-dimensional Cartesian body. y σ yx σ yx dy y x σ xx σ xx dx σ xx dx x σ yx Fig. 6.4 x direction forces on a volume element dx in length and dy in height The balance of x-directed forces is: σ σ net x force = σ xx xx dx σ xx dy σ yx yx dy σ yx dx 0 x y or: σ xx σ yx 0 x y (6.10) Comparable equilibrium conditions apply to the y- and z-directions, and the extension to three dimensions is straightforward (see Ref. 1, Appendix) In axisymmetric cylindrical coordinates, the radial equilibrium condition is: σ rr σ rr σ θ θ σ rz 0 r r z and for the z direction: 1 (rσ rz ) σ zz 0 r r z (6.11a) (6.11b) In spherical coordinates with spherical symmetry, the radial equilibrium condition is: σ rr σ σ θθ 2 rr 0 r r and, by symmetry: σ θθ σ φφ Light Water Reactor Materials, Draft 2006 © Donald Olander and Arthur Motta 2/17/2016 8 (6.12a) (6.12b) 9 6.3. Stress-Strain Relations The final set of equations that forms the basis of elasticity theory relates stresses and strains. Contrary to the strain-displacement relations (Eqs (6.6) – (6.8)) and the equilibrium conditions (Eqs (6.10) – (6.12)), the connection between stresses and strains involves material properties called elastic moduli. A single crystal can possess as many as 36 such parameters, but polycrystalline solids with random grain orientations exhibit only two elastic moduli. Young’s modulus and Poisson’s Ratio Figure 6.2a represents the simplest of loading configurations because it produces only one component of stress, the normal component x. The axial strain defined by the first of Eqs (6.5) is related to x by: x = x/E (6.13) where E is a material property called Young’s modulus or the modulus of elasticity. For steels, E ~ 2x105 MPa; the value of E for aluminum is about one third that for steel. The nuclear fuel UO2 has approximately the same Young’s modulus as steel, but this correspondence has little to do with the mechanical performance in a reactor environment, as will be seen in subsequent chapters There is a stress limit (and consequently a strain limit) for the applicability of Eq (6.13). For steel, the proportionality of stress and strain implied in this formula fails at a stress of about 500 MPa, which is called the yield stress. At this point the strain is 0.3%. These conditions define the elastic limit of the material. As suggested in Fig. 6.2a, a positive displacement (or strain) in the x direction produces a negative displacement (or strain) in the y direction. The third transverse direction (z) experiences the same strain as does the y direction, or z = y. The ratio of the magnitudes of the lateral strains to the axial strain in the uniaxial tensile situation of Fig. 6.2a defines Poisson’s ratio, : = -y/x = -z/x (6.14) Like E, is a material property, and moreover, is nearly the same for all materials. It is not surprising that the deformed body in Fig. 6.2a shrinks in transverse dimensions as it elongates axially. Otherwise, a substantial volume change would occur. However, the transverse shrinkage does not quite compensate for the axial elongation, and the solid changes volume as it deforms elastically. Microscopic Origins of Young’s Modulus and Poisson’s Ratio Macroscopic elastic strains are, on a microscopic scale, due to the stretching or contraction of bonds between atoms. Figure 6.5 depicts the microscopic response to a tensile Light Water Reactor Materials, Draft 2006 © Donald Olander and Arthur Motta 2/17/2016 9 10 force on the (111) plane of the fcc crystal structure. The origin of Young’s modulus can be explained by the increase in the distance ab between adjacent atoms a and b in the unstressed condition to the distance a’b’ with the applied stress This n x y z a' a c d c' d' b' b Unstressed n Fig. 6.5 Movement of atoms as a result of application of a tensile stress Potential energy stretching of the a-b bond is accompanied by an increase in the potential energy between the two atoms. The potential energy between two atoms is shown in Fig. 6.6 as a function atom separation in the x direction. In the unstressed 0 ab a'b' atom separation Fig.6.6. Fig. 5.6 Relation of Young's Modulus to Interatomic Potential state, the atom separation ab lies close to the minimum on the potential curve. Increasing the separation distance to a’b’ is accompanied by an increase in the potential energy between the two atoms. Around its minimum, the potential energy curve can be approximated by a parabola: 1 d 2φ 2 φ φ o 2 x 2 dx 0 Light Water Reactor Materials, Draft 2006 © Donald Olander and Arthur Motta 2/17/2016 10 (6.15) 11 where the origin of the separation distance x is defined as the location of ab in Fig. 6.6 The force between the two atoms is the negative of the gradient of the potential energy. The force to increase the separation from ab to a’b’ is: d 2φ dφ F 2 (a ' b'ab) dx dx 0 (6.16) Macroscopically, the force is equal to the negative of the stress n times the projected area of an atom, r2, where r = ½ab is the atomic radius. (the force is negative because it acts to reduce the separation distance). F = -n(r2) (6.17) The strain is the separation (displacement) of the atom centers divided by the original distance between the centers: n = a ' b'ab ab (6.18) Combining the above three equations and using ab = 2r yields the Young’s modulus in atomic terms: σn 2 d 2φ E ε n π r dx 2 0 (6.19) Unfortunately, knowing the potential energy curve of Fig. 6.6 is the only way to estimate the second derivative in Eq (6.19). Poisson’s ratio is derivable (for the fcc structure) by superimposing the two diamondshaped figures in Fig. 6.5, as shown in Fig. 6.7. The normal strain in the x direction, n, and the normal strains in the transverse (y or z) directions, t, are: ε n a a' oa ε t c c' oc (6.20) Now oc is the height of the equilateral triangle abc. Since all sides of the quadrilateral adbc are equal to twice the atomic radius (see Fig. 6.5): oc oc 3 sin 60 a c 2oa 2 Light Water Reactor Materials, Draft 2006 © Donald Olander and Arthur Motta 2/17/2016 11 12 a' a 60 d d' O c c' b b' Fig 6.7 Diagram for calculating Poisson’s ratio in the fcc structure Considering the angle in Fig. 6.7 and noting that a’c’ equals twice the atomic radius: sin θ cos θ o a' o a a a' 1 a a' 1 1 ε 1 a ' c' 2oa 2 o a 2 n o c' o c c c ' 3 o c c c' 3 1 (ε t ) a ' c' 2oa 2 oc 2 Squaring and adding the above two equations yields: 1 1 1 ε 4 n 2 3 1 ε t 2 4 Since the strains are always << 1 (for elastic deformations), the squared parenthetical terms can be expanded in one-term Taylor series, which yields: -ε t 1 ν εn 3 (6.21) Thus, Poisson’s ratio is not a material property in the sense that Young’s modulus is; depends only on the crystal structure. Although the above derivation was restricted to the closepacked plane of the fcc structure, similar results are obtained for other planes and other lattice types. Nearly all crystalline solids exhibit Poisson’s ratios close to the theoretical value of 1/3. Complete Stress-Strain Relations Equation (6.13) is all that remains of the more general stress-strain relation when only one normal stress component acts on a body. The corresponding formulation when all six stress components are nonzero are known as the generalized Hooke’s Law. These equations are the same in all coordinate systems; instead of the subscripts x, y, and z, the coordinate axes are Light Water Reactor Materials, Draft 2006 © Donald Olander and Arthur Motta 2/17/2016 12 13 labeled 1, 2, and 3 so as to include cylindrical and spherical geometries as well as Cartesian coordinates. For the normal stresses and strains: 1 σ 1 ν (σ 2 σ 3 ) E 1 ε 2 σ 2 ν (σ 1 σ 3 ) E 1 ε 3 σ 3 ν (σ 1 σ 2 ) E ε1 (6.22a) (6.22b) (6.22c) and for shear stresses and strains: ε 12 σ 12 / G ε 13 σ 13 / G ε 23 σ 23 / G (6.23) In Eq (6.23), G is the shear modulus. G is not independent of E and , as is shown in the following analysis. Figure 6.8 is a cross section of a square prism of side length L that is acted upon by a shear stress S. When the applied shear stresses are resolved on the diagonal of the square, the resultant components are both normal*. One, labeled n is tensile and in the direction of the diagonal and the other, n’, is compressive and perpendicular to it. The triangles on each of the four sides of the square in Fig. 6.8a s L 'n s n s L s (a) stresses resolved on diagonal u v (b) Strains Fig. 6.8 Stresses (a) and strains (b) of a square prism subjected to pure applied shear stress S represent the resolution of the applied shear stress S into components parallel to and perpendicular to the diagonal. The magnitude of each stress component is S/ 2 and the force each exerts on the diagonal element is (S/ 2 )L. Since two of the resolved components of S contribute, each of the normal forces on the diagonal is 2(S/ 2 )L. The length of the diagonal is * In this respect, pure applied shear stress differs from pure applied normal stress, which is resolved on a tilted plane as a shear and a normal component (see Fig. 6.1) Light Water Reactor Materials, Draft 2006 © Donald Olander and Arthur Motta 2/17/2016 13 14 2 L , so conversion of the normal forces to normal stresses results in 2(S/ 2 )L/( 2 L) for each, or: n = -’n = S (6.24) Figure 6.8b depicts the strains resulting from the shear stresses applied to the square and from the resulting normal stresses on the diagonal. The normal stresses n and ’n produce a displacement u of the diagonal element. The normal strain of the diagonal is u/( 2 L), which can also be expressed by Eq (6.22a) with 1 = n , 2 = ’n and 3 = 0. Equating these two forms of the normal strain and using Eq (6.24) yields: u 1 σ σ n νσ 'n S (1 ν ) E 2L E (6.25) From its definition (as Y in Eq (6.4)), the shear strain of the initially square figure is v/L. Now u and v are related (approximately) by the 45o right triangle shown in black in the lower right hand corner of Fig. 6.8b. Because v is the hypotenuse of this triangle, the two displacements are related by v = 2 u. With the help of Eq (6.25), the shear strain of the square is: v 2u 2u σ 2 εS 2 L S (1 ν ) (1 ν )σ S L L L E E Comparing this result with the shear modulus G as defined by Eq (6.23) yields the desired connection between G, E and : E G (6.26) 2 (1 ν ) Since Poisson’s ratio is ~ 1/3 for most materials, this relation shows that the shear modulus is approximately 3/8 of Young’s modulus. Another elastic constant that describes the volume change due to the normal stress components is called the bulk modulus, K. If the normal stresses are due to the pressure in a fluid in which the body is immersed, 1 = 2 = 3 = -p. The quantity in a solid corresponding to the pressure in a fluid is the mean hydrostatic stress, defined by: 1 σ h (σ 1 σ 2 σ 3 ) 3 (6.27) The change in volume from initial value V to final value Vf is related to the normal strains by: Vf/V = (1+1) (1+2) (1+3) 1 + (1+2+3) or, the fractional volume change is the sum of the normal strains: Light Water Reactor Materials, Draft 2006 © Donald Olander and Arthur Motta 2/17/2016 14 15 ΔV 1 + 2 + 3 V (6.28) Adding Eqs (6.22a) – (6.22c) gives: 1 + 2 + 3 = 1 (σ 1 σ 2 σ 3 ) 2ν (σ 1 σ 2 σ 3 ) E Substituting Eqs (6.27) and (6.28) into the above equation yields: σ Δ V 3(1 2ν ) σh h V E K (6.29) where the bulk modulus is+ K E 3(1 2ν ) (6.30) Note the similarity between Eq (6.29) and the uniaxial form of Hooke’s law, Eq (6.13). The linear strain in the latter is replaced by the volumetric strain in the former. In place of the axial stress in Hooke’s law, the bulk compressibility formula employs the mean of the three orthogonal normal stresses. The bulk modulus K is the three-dimensional analog of Young’s modulus. In fact, if Poisson’s ratio is 1/3, K and E are equal. Elastic energy density Work is required to produce the elongation of the rod depicted in Fig. 6.2a. No work is expended in creating the transverse displacement because no forces act on the rod’s vertical sides. The external work performed by the force F is converted to the increase in the internal energy of the solid by stretching the interatomic bonds, as shown in Fig. 6.6. When divided by the volume of the body, the internal energy stored in the solid is called the elastic energy density, or sometimes simply the strain energy. This excess energy (over a perfect, unstressed solid) is the source of thermodynamic instability of defects such as, dislocations, grain boundaries, and voids. Considering only the upper half of the deformed rod in Fig. 6.2a, the work needed to u produce the displacement u is Fdu . This work is stored internally in the solid, and when 0 divided by LoA to convert to an internal energy density yields: Like the thermal expansion coefficient , the bulk modulus is a thermodynamic property related to the coefficient of compressibility = -(1/V)(V/p)T . Comparison of this definition (in its integrated form) with Eq (6.29) wherein h is replaced by –p shows that K = 1/ + Light Water Reactor Materials, Draft 2006 © Donald Olander and Arthur Motta 2/17/2016 15 16 σ 2x F du ε x 1 σx E el 0 σ x dε x 0 σ x dσ x A Lo E 2E u 0 where Hooke’s law has been used to convert the variable of integration from strain to stress. Similarly, the strain energy in pure shear can be deduced from the forces and displacements shown in Fig. 6.8. This body is a square prism of unit depth and side length L. Work is done only by the action of the force SL acting on the right hand face; the other three faces do no work because they remain fixed in dimensions. The analog of the above equation for this case is: εS σS (σ SL) dv 1 σ S2 Eel σ Sdε S σ dσ L L G 0 S S 2G 0 0 u where the shear analog of Hooke’s law (Eq (6.23) ) has been used to convert strain to stress in the integral. For the general case in which all six components of the stress are nonzero, the above equation is extended to: E el 1 2 ν 1 2 2 σ 1 σ 22 σ 32 σ 1σ 2 σ 1σ 3 σ 2σ 3 σ 12 σ 13 σ 223 (6.31) 2E E 2G This equation applies to all coordinate systems, whose orthogonal axes are designated by 1, 2 and 3. 6.4. Membrane Stresses in Cylinders and Spheres The preceding sections dealt with the fundamentals of elasticity theory, including stresses, strains and displacements arising from externally applied loads (membrane stresses). In this section, the general theory is applied to membrane stresses in the simple geometries most frequently encountered in nuclear systems. For example, fuel rod cladding, the reactor pressure vessel and the piping of the primary coolant circuit are accurately modeled as annular cylinders with large radius-to-wall thickness ratios and infinite in length. The hemispherical upper and lower heads connected to the pressure vessel wall are treated in spherical geometry. These components operate essentially isothermally, so the stresses are due only to the difference in pressure across the wall. Thermal stresses due to temperature nonuniformities in a component are analyzed in Sect. 6.6. Thin-Wall Cylinders and Spheres Light Water Reactor Materials, Draft 2006 © Donald Olander and Arthur Motta 2/17/2016 16 17 If the radius of a cylinder or sphere is much larger than the thickness of the wall, it can be treated in the so-called thin-wall approximation. This method replaces the mathematical machinery of elasticity theory with simple force balances. Because the wall is thin, the spatial stress distributions are replaced by average values. Figure 6.9 shows a cross section of a thin-wall cylinder of radius R and wall thickness that is internally pressurized by a pressure p. The pressure acts radially on the inner surface, and so must be resolved in the vertical direction in order to balance the azimuthal stress acting on the midplane section of the tube wall. The middle diagram of Fig. 6.9 shows the resolved upward force dFpress due to the pressure on an arc length Rd of the inner wall. Per unit length perpendicular to the diagram, the upward pressure force is: π Fpress pR sin θ dθ 2pR 0 top P P R z z Fig. 6.9 Average stresses in a thin-wall cylinder Fpress is opposed by the azimuthal stress acting on the area (per unit length) on both sides of the cross section. This force is Fstress = 2δ σθ . At equilibrium, Fpress = Fstress, or: σθ pR δ (6.32) The average azimuthal stress is tensile. In order to maintain a pressure in the tube, its ends must be closed. The right hand sketch in Fig. 6.9 shows the closed top of the tube and a cross section far enough removed from the top to avoid end effects that would invalidate the simple force-balance analysis. The force exerted on the closed top, R2p, is balanced by the tensile force in the tube wall, 2Rδ σ z . Equating these two yields: Light Water Reactor Materials, Draft 2006 © Donald Olander and Arthur Motta 2/17/2016 17 18 σz pR 2δ (6.33) which is tensile and one half as large as the azimuthal stress. The radial stress on the inner wall is –p. Assuming zero external pressure, the average radial stress is: 1 σr p 2 (6.34) which is small compared to σθ and σ z because the factor R/ is large in thin-wall tubing. Example The upper head of the reactor pressure vessel in PWR is hemisphere 4 m in diameter and 24 cm thick (see Fig. I.15). It is attached to the cylindrical wall of the pressure vessel by a flange with a number of 8 cm diameter bolts. The internal pressure in the vessel is 15 MPa. How many bolts are required so that the stress in each does not exceed 2/3 of the yield stress (350 MPa)? The bolts must resist the vertical component of the force due to the internal steam pressure acting on the inside of the hemispherical upper head. The differential area on which the pressure acts is an annular strip of width Rd and periphery 2Rcos, or an area equal to 2R2cosd. Here R is the radius of the pressure vessel and is the angle with respect to the vessel axis. Resolving the pressure stress in a vertical direction by multiplying p by sin and integrating the polar angle from 0 to /2 yields: π /2 1 Fpress 2π R 2p cosθ sin θ dθ 2π R 2p cosθ d(cosθ ) π R 2p 0 0 The stress in N bolts of radius Rbolt resisting the pressure force is: σ bolt π R 2p Nπ R 2bolt if bolt is not to exceed 2/3 of the yield stress Y, the required number of bolts is: 3 p R N 2 σ Y R bolt 2 3 15 2 160 2 350 0.04 or, the spacing between bolts is 2R/N = 7.8 cm. There is no way to compute the strains or displacements by the simple force-balance method used above for the average stresses. Full elasticity theory is needed to calculate the strains and displacements, and is treated below. Thick-wall Cylinders Light Water Reactor Materials, Draft 2006 © Donald Olander and Arthur Motta 2/17/2016 18 19 In order to calculate stresses and strains in internally-pressurized cylindrical components which do not satisfy the thin-wall criterion employed above, the full set of elasticity equations must be utilized. As long as the analysis is not applied near the ends of the cylinder, only normal stresses and strains are developed. The starting point is the set of equations given by Eqs (6.8), (6.11a), and (6.22). The approach is to combine these equations so as to sequentially eliminate one variable at a time until a single equation with only one variable is obtained. The remaining variable should be the one to which the boundary conditions on the inner and outer walls of the cylinder apply. First, ur is eliminated between the first two of Eqs (6.8), yielding: dε θ ε θ ε r 0 dr r (6.35) Next, the strains in Eq (6.35) are replaced by the stresses by using Eqs (6.22a) and (6.22b): d σ θ ν (σ r σ z ) 1 ν (σ θ σ r ) 0 dr r To proceed further, a condition reflecting the requirement that the analysis is applied far from the cylinder ends is introduced. The condition is that during elastic deformation, what was a planar cross section of the cylinder remains planar. This condition is equivalent to requiring that the axial strain or axial displacement is not a function of radius. This condition is called plane strain, and is mathematically expressed by dz/dr = 0. When applied to Eq (6.22c), it yields: dσ z d ν (σ r σ θ ) 0 dr dr The next step is to eliminate dz/dr between the above two equations, which results in: (1 ν 2 ) dσ θ dσ 1ν ν (1 ν ) r (σ θ σ r ) 0 dr dr r Finally, the equilibrium condition of Eq (6.11a), dropping the last term, is used to eliminate the hoop stress from the above equation to produce the differential equation in the radial stress component: 1 d 3 dσ r (6.36) r 0 r 3 dr dr which is readily integrated twice. Using the boundary conditions r(Ro) = 0 and r(R) = -p, where R and Ro are the inner and outer radii of the cylinder, respectively, the solution is: (R / r ) 2 1 (6.37) σ r p o (R o / R ) 2 1 Light Water Reactor Materials, Draft 2006 © Donald Olander and Arthur Motta 2/17/2016 19 20 The hoop stress is obtained by substituting the above equation into Eq (6.11a) (without the shear stress term): (R o / r ) 2 1 = p (6.38) (R o / R ) 2 1 In the thin-wall limit as Ro – R = << R, Eq (6.39) reduces to Eq (6.32). There remains to specify the axial end conditions in order to calculate z and from this and Eqs (6.37) and (6.38), the strains and displacements. Three possibilities are shown schematically in Fig.6.10. Fig. 6.10 End Conditions on a thick-wall cylinder In case (a), the axial strain is zero. Setting 3 = z = 0 in Eq (6.22c), inserting the radial and azimuthal stresses from Eqs (6.37) and (6.38) gives: σ z (a ) p 2ν (R o / R ) 2 1 (6.39a) which is tensile, independent of r, and smaller than . In case (b), the open end precludes establishment of stresses by gas pressure. However, an internal radial stress can be produced by the so-called expanding mandrel method, in which a cold, close fitting solid rod is inserted into the cylinder and allowed to heat up to ambient temperature. Thermal expansion creates a radial stress on the cylinder inner wall, which, if denoted by –p, produces the radial and hoop stresses given by Eqs (6.38) and (6.39). However, there is no axial stress because there is no stress exerted on the upper end of the annulus, or: Light Water Reactor Materials, Draft 2006 © Donald Olander and Arthur Motta 2/17/2016 20 21 z(b) = 0 (6.39b) In case (c), the axial stress is obtained by equating the force on the inner surface of the upper end, R2p, with the counterbalancing force in the annular cross section, π (R o2 R 2 ) σ z . This yields: 1 (6.39c) σ z ( c) p (R o / R ) 2 1 As R Ro, Eq (6.40c) reduces to Eq (6.34). Once all the stresses have been computed, the strains follow from Eqs (6.22a) – (6.22c). Spherical Shapes Three spherically-shaped objects subject to mechanical loads are important in nuclear technology: the spherical shell with different internal and external gas pressures, such as the top head of the reactor pressure vessel analyzed by the force balance method earlier in this chapter; spherical voids or gas bubbles in solids created as a result of irradiation; and solid spheres that create stresses in the surrounding host solid. In this last category are atomic-size spheres such as interstitial atoms and macroscopic objects such as precipitates. In all of these examples, determination of the stresses (generally all normal stresses) in the spherical object or in the medium in which the sphere is embedded is needed. The normal stress components active in spherical geometry are the radial component r the polar component and the azimuthal component . The present analysis is limited to the common case of spherical symmetry, meaning that none of the stress components are functions of or but depend on r only. This does not mean that and are zero, only that they are equal. The mathematical manipulations of the elasticity equations are analogous to those employed for cylindrical geometry: i) ur is eliminated between Eqs (6.9) ii) The stress-strain relations of Eqs (6.22a) and (6.22b) with 1 = r and 2 = 3 = are substituted into the result of step i). iii) and its derivative with respect to r are eliminated from the results of step ii) using Eq (6.12a). The result is the ordinary differential equation : 1 d 4 dσ r r 0 dr r 4 dr (6.40) Integrating twice yields the general solution = C1 + C2/r3, with the integration constants depending on the particular problem. For the internally-pressurized spherical-shell of inner radius R and outer radius Ro , the boundary conditions are r(R) = -p and r(Ro) = 0. The radial stress component is: Light Water Reactor Materials, Draft 2006 © Donald Olander and Arthur Motta 2/17/2016 21 22 σ r p ( R o / r )3 1 (6.41) ( R o / R )3 1 Substituting this result into the equilibrium condition of Eq (6.12a) yields the tangential stresses: = = p 0.5 (R o / r )3 1 (6.42) ( R o / R )3 1 Note the strong similarity between these equations and the corresponding equations for the thickwall cylindrical annulus (Eqs (6.36) – (6.38)). In the thin-wall limit (Ro – R = << R), Eq (6.432 reduces to: σθ pR 2δ (6.43) which is half of the hoop stress for the thin-wall cylinder (Eq (6.32)). 6.5. Thermal Stresses Almost every component of a reactor core and the primary pressure system is subject to nonuniform temperature. Thermal gradients in fuel are generated by internal heating due to slowing-down of fission fragments. Gamma-rays heat metal structures. In the absence of internal heat sources, spatial temperature variations are produced by unequal temperatures over the surface of a body. It does not matter whether the thermal gradients are steady state or transient; the thermal stresses are dependent only on the instantaneous temperature distribution. When an unrestrained (i.e., stress-free) body is heated from temperature T to a higher temperature T + T, it expands in each of the three orthogonal coordinate directions by an amount TL, where L is the original length and is the linear coefficient of thermal expansion.+ When this expansion is impeded, either internally or externally, the stresses generated in the body are called thermal stresses. These stresses arise in numerous situations, such as: - + Restraint of free thermal expansion during uniform heating by intimate with other rigid structures. interaction is a thermodynamic property, being 1/3 of the volumetric coefficient of thermal expansion, vol = 1 v , where v is the specific volume and p is pressure. vol is obtained from the equation of v T p state of the solid. Light Water Reactor Materials, Draft 2006 © Donald Olander and Arthur Motta 2/17/2016 22 23 Example: A bar of length L with a linear thermal expansion coefficient is placed between two rigid ends. At temperature T the bar is stress-free. The bar is then heated to temperature T+T but the end pieces remain the same distance apart. First imagine that the top end piece is removed and the bar allowed to expand freely by an amount TL, or a thermal strain th = T. Now a stress is applied to the top of the bar that L is just sufficient to return the bar to its original length and the top end piece replaced. The elastic strain in this step is el = /E. The total strain is zero: tot = th + el = 0, or the thermal stress in the bar is th = -ET. The negative sign indicates that the stress is compressive, and the superscript “th” on the stress indicates that it is due to restrained thermal expansion. - Another example of restrained thermal expansion is the compressive stresses generated by uniform heating of a solid containing inclusions (precipitates) with a larger value of than that of the host solid. - Temperature nonuniformities (i.e., thermal gradients) in a body produced by temperature differences on the boundaries+. - Thermal gradients created by heat generation in (and removal from) a component. The most important example of this mechanism is the fission energy released in nuclear fuels, which is removed as heat by an external coolant. - stresses in reactor components by producing temperature gradients where there were none or by increasing the magnitude of existing temperature gradients. Such changes include reactor power changes during startup or shutdown and the sudden injection of cold emergency cooling water near the inner wall of the reactor pressure vessel (see Chap. Xxx). The thermal stresses produced by temperature gradients can be understood by a simple physical picture. The hotter part of the body seeks to expand more than the cooler part. However, this tendency is impeded by the adjacent cold region. Similarly, expansion of the cold portion is enhanced by the greater expansion of the contiguous hot part. As a result of this interaction, the hot zone develops compressive stresses and the cold zone is placed in tension. Between these two stressed zones lies a surface of zero thermal stress. Thermal stresses are readily incorporated into the framework of elasticity theory by adding the linear thermal strain to the elastic strains given by Eqs (6.22): 1 σ 1 ν (σ 2 σ 3 ) + T E 1 σ 2 ν (σ 1 σ 3 )+ T E ε1 (6.44a) ε (6.44b) 2 + One exception to this rule is a linear temperature profile in an unrestrained plate, in which no thermal stresses are generated (see Ref., XX p. 388) Light Water Reactor Materials, Draft 2006 © Donald Olander and Arthur Motta 2/17/2016 23 24 ε 3 1 σ 3 ν (σ 1 σ 2 )+ T E (6.44c) Axially Symmetric Cylindrical Geometry The analysis below applies to infinitely long cylindrical annuli as well as to solid cylinders at locations sufficiently far removed from the ends. In both cases, the temperature distribution is assumed to be a function of radial position only. The outer boundary condition is not a function of azimuthal angle or axial location z. Following the same sequence of manipulations starting from Eq (6.35) but using Eqs (6.44a) and (6.44b) instead of Eqs (6.22a) and (6.22b) changes Eq (6.36) to: 1 d 3 dσ r αE r 3 dr r dr 1 ν 1 dT r dr (6.45) This equation is integrated for a long, thick-wall cylinder with inner radius R and outer radius Ro. Pressure loading is not considered, so the boundary conditions are r(R) = r(Ro) = 0 (6.46) The result is: σ th r αE 1 ν 1 R 2 / r 2 2 2 R o R Ro R rT(r )dr r T ( r ) dr r2 R 1 r (6.47) Using this in Eq (6.11a), without the shear stress term, gives the hoop stress: σ θth αE 1 ν 1 R 2 / r 2 2 2 R o R Ro R rT(r )dr r T ( r ) dr T ( r ) r2 R 1 r (6.48) The temperature distribution T(r) can be due to different temperatures at the inner and outer surfaces, internal heat generation in the wall with constant and equal surface temperatures, or a transient temperature change in an initially isothermal cylinder. Note that these thermal stress components are independent of the axial end conditions, although these end conditions affect the axial component of the stress. Example: A temperature difference T is maintained across the cladding of a reactor fuel element. The cladding wall thickness is sufficiently small so that the “thin-wall” approximation, Ro – R = << R, applies. For the purpose of calculating the temperature distribution, the wall can be considered a slab (i.e, its curvature neglected) and the radial temperature profile is linear: ΔT T( r ) T ( R ) y δ where T = T(R) – T(Ro) and y = r – R. Although the cylindrical nature of the tube can be neglected for the purpose of calculating the temperature distribution, the same simplification cannot be applied to Light Water Reactor Materials, Draft 2006 © Donald Olander and Arthur Motta 2/17/2016 24 25 the stress analysis (i.e., the thin wall tube is still a tube as far as stress calculation goes). Substituting the above equation into Eq (6.48) and using the thin-wall condition where needed results in the hoop stress: y α EΔ T σ θth 1 2 2(1 ν ) δ The thermal stress is negative (compressive) on the inner half and tensile on the outer half, as expected from the discussion on the bottom of p. 22. An important application of cylindrical thermal stresses is to the ceramic fuel pellets in nuclear reactor fuel rod. Uniform volumetric heating in the solid cylinder cooled at its periphery generates a parabolic temperature distribution (see Chap. XXX). With temperature TS at the pellet surface and To on the axis, the distribution is: T TS r2 1 2 To TS Ro (6.49) Using Eq (6.49) in Eqs (6.57) and (6.48) along with R = 0 and integrating yields: σ rth σ θth α E(T0 Ts ) r 2 1 4(1 ν ) R 2 α E(T0 Ts ) r2 1 3 2 4(1 ν ) R (6.50) (6.51) Calculation of the axial stress distribution proceeds as follows. For a stack of fuel pellets, the unrestrained end condition (6.40b) is applicable: σzth 1 π R o2 Ro 2π rσ zth (r )dr 0 0 Next, Eq (6.44c) is solved for z and the result substituted into the above integral. In performing this integral, (1 + 2) is (σ r σ θ ), which is the sum of Eqs (6.50) and (6.51), and T is T – TS given by Eq (6.49). The axial strain z in Eq (6.44c) is independent of r; this is the condition of plane strain, which was needed in the derivation of Eq (6.36) and Eq (6.45). With these conditions, the above integral is solved for z, which then permits Eq (6.44c) to be solved for the axial thermal stress: th th Light Water Reactor Materials, Draft 2006 © Donald Olander and Arthur Motta 2/17/2016 25 26 α E(T0 Ts ) r2 th σz 2 4 2 4(1 ν ) R (6.52) The plane strain restriction means that the thermal stress solutions are applicable only near the midplane of the solid cylinder; the ends do not satisfy the plane strain condition, and are in fact, surfaces of plane stress (i.e., zero stress is not a function of radial position. Pellet Expansion The thickness of the gas-filled gap between the fuel pellet and the cladding tube strongly affects heat transfer from, and consequently, the temperature of the fuel. The gap thickness decreases from its initial “cold” value as a result of assuming the temperature distribution given by Eq (6.49) during operation. The gap thickness reduction is largely due to thermal expansion of the pellets. According to Eq (6.8), the strain component evaluated at r = R is the fractional increase in the cylinder radius. This is expressed by Eq (6.44b) evaluated at r = R, where r = 0 and T = TS: 1 ε θ (R ) σ θ (R ) νσ z (R ) α (TS Tref ) E where Tref is the pellet temperature in the cold state. The stresses are obtained from Eqs (6.51) and (6.52): α E(To TS ) σ θ (R ) σ z (R ) 2(1 ν ) Combining the above two equations yields: ε θ (R ) Δ R / R α ( T Tref ) (6.53) where T = ½ (To + TS) is the average cylinder temperature. This simple result is valid only for the parabolic temperature distribution of Eq (6.49). Pellet Cracking The thermal stresses due to heat removal from a solid cylinder may exceed the fracture stress of the solid, particularly if the material is a brittle ceramic such as uranium dioxide. Equations (6.51) and (6.52) are plotted in Fig. 6.11. The region of interest is near the outer edge of the cylinder, where the azimuthal and axial stresses Light Water Reactor Materials, Draft 2006 © Donald Olander and Arthur Motta 2/17/2016 26 27 Fig. 6.11 Stress distributions in a cylinder with no end restraints are tensile. If either stress exceeds the fracture stress, vertical and/or horizontal, radially-oriented cracks appear in the pellet (see Fig. 6.12). The “hourglass” shape of the pellet in Fig. 6.12 is due to the change from the plane strain condition near the midplane to the plane stress condition at the ends. This thermal stress driven cracking and deformation phenomena have significant effects on the behavior of the fuel during operation (Chap. Xxx). Fig. 6.12 Cracking and “hourglassing” in fuel pellets with uniform heat generation Thermal Stress Parameter Modification of the scaling factor for the stress in the ordinate of Fig. 6.11 provides a general measure of the ability of a material to withstand thermal stresses. Specifically, the temperature difference is expressed in terms of Fourier’s law as T = qL/, where q is the heat flux, L is the distance over which T occurs, and is the thermal conductivity. The first two of these parameters are operational, in the sense that they can be changed at will. The last, however, is a material property. Substituting the Fourier-law Light Water Reactor Materials, Draft 2006 © Donald Olander and Arthur Motta 2/17/2016 27 28 expression for T into the scaling factor for the stress in the ordinate of Fig. 6.11 and neglecting the product qL leaves a grouping of material properties intimately related to the thermal stress resistance of the material. Finally, the stress in the ordinate of Fig. 6.11 is replaced by the fracture stress F, which is the stress that results in thermal stress cracking. With these modifications, a parameter that contains the properties that govern the resistance of a solid to failure by thermal stresses is: σ (1 ν )κ M F αE (6.54) M is called the thermal stress parameter. Although it was developed from the solution for solid cylinder, the concept is applicable to any geometry, with or without heat generation. The larger M is, the more resistant to thermal stress failure is the solid. A high thermal conductivity is beneficial because, for a fixed heat flux, it reduces T. A small coefficient of thermal expansion is desirable because it reduces the thermal strain in Eqs (6.44). Solids show considerable variation in M. Graphite, for example, has an M value of ~ 30,000, while for stainless steel, M ~ 2000 (with the yield stress used instead of the fracture stress). Ceramic oxides such as UO2 generally exhibit even lower thermal stress parameters than metals. Quartz, because of its very low thermal expansion coefficient, has a large M value. Problems 6.1 Starting with Eq (6.9), prove that the thermal expansion of a solid cylinder with the parabolic radial temperature distribution of Eq (6.28) is given by Eq (6.32) of the notes. Here To and Ts are the centerline and surface temperatures, respectively, and Tref is a reference temperature. The linear thermal expansion coefficient is . 6.2 Determine the radial depth of penetration of vertical thermal-stress cracks in a fuel pellet with a parabolic temperature distribution To = 2000oC, Ts = 500oC. Assume the following elastic properties for UO2: f = 140 Mpa = 1.0x10-5 K-1 E = 1.6x105 Mpa G = 5.9x104 Mpa 6.3 Derive the expression for the stored elastic energy per unit length of a tube of radius R and wall thickness that is internally pressurized at a pressure p. The material has a Young’s modulus E and a Poisson’s ratio . Use the thin-wall approximation. 6.4 Light Water Reactor Materials, Draft 2006 © Donald Olander and Arthur Motta 2/17/2016 28 29 What error is incurred in calculating the average hoop stress by using the thin-wall approximation for cladding 1 cm inside diameter and 1 mm wall thickness? Hint: this is most efficiently done by expanding the terms in Eq (6.23) in one-term Taylor series before taking the average. References 1. D. R. Olander, “Fundamentals of Nuclear Reactor Fuel Elements”, TID-26711-P1, Technical Information Service (1976) 2. C. F. Bonilla, “Nuclear Engineering” , Chap. 11, McGraw Hill (1957) 3. J. H. Rust, “Nuclear Power Plant Engineering”, Chap. 8, Haralson Pub. Co. (1979) Light Water Reactor Materials, Draft 2006 © Donald Olander and Arthur Motta 2/17/2016 29 Nat’l