Study on Effect of Yaw Error Angle and Geo
advertisement

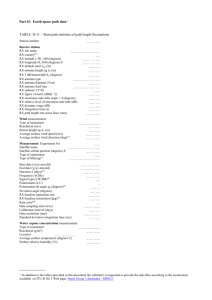
Study on Effects of Yaw and Co-Location on Cross-Polarized Signal Variation R. Thaiprayoon and N. Homsup Department of Electrical Engineering Kasetsart University, Jatujak, Bangkok 10900, Thailand E-mail address: rungnapt@cscoms.com, fengnth@ku.ac.th Abstract This research concerns the study and test design to find the cause(s) of the variation in the cross-polarized signal level measured by a receiving antenna. Such variation in turn causes interference and degrades the performance of the satellite communication links utilizing same frequency but orthogonal polarization. Specifically, the study is focused on Thaicom-2 and Thaicom-3 satellites which use frequency reuse in orthogonal polarization fashion. The concept and hypotheses for possible causes are based on the basic characteristics of the satellite, attitude control, station keeping, co-location strategy, Faraday rotation and antenna cross-polarization pattern. characteristics of the satellite, attitude control, station keeping, co-location strategy, and antenna crosspolarization pattern. We also found that the measurements suggest the strong effect of Faraday rotation. 2. Satellite Yaw Error Angle To a satellite attitude control, the yaw angle is defined to be the angle that rotates about the axis pointing to Earth, which is a reference plane of polarization (Figure 1). If the reference plane rotates, the levels of co-polarized signal and cross-polarized signal will be affected in opposite direction. However, the cross-polarized signal increases more rapidly than the co-polarized signal decreases. 1. Introduction To efficiently utilize the same bandwidth, the Thaicom satellites employ frequency reuse by using orthogonal linear polarizations to avoid interference of the signals occupying the same frequency. Before accessing the satellite, an uplink station is required not to generate any interference signals into the opposite polarization. However, the real-world experience shows that although there is adjustment of the polarization of an antenna, which is done manually during Uplink Access Test, to have largest difference in the level of copolarization signal to that of the cross-polarization signal, called “Cross Polarization Isolation”. The interference from the cross-polarized signal still exists and could seriously interfere the other signals. In another word, the adjustment at one time is not enough. The antenna needs continuous adjustment for the polarization to keep the Cross Polarization Isolation at the acceptable value. From actual monitoring of the cross-polarized signals, the cross-polarized signals vary during a day. The magnitude of the variation is in 8 to 12 dB range. This range can tremendously degrade the quality of the signal(s) in the opposite polarization especially if the quality of the signal(s) is already right at the edge between acceptable and unacceptable. Therefore, it is valuable to study the causes of such variation in the cross-polarized signal. Possible causes studied are based on the Figure 1 Yaw, Pitch, and Roll definitions [1]. In general, the polarization of the receiving antenna will not be the same as the polarization of the incident wave. The amount of power received by the antenna from the incoming signal will not be at maximum because of the polarization loss. The polarization loss can be taken into account by introducing a polarization loss factor (PLF). It is defined as [2] CoPLF cos p 2 CrossPLF sin p (1) 2 (2) where p is the polarization angle between the planes of the incoming wave and the antenna co-polarized axis. Note that the Yaw error in dual-spin stabilized satellite behaves like a sine curve with a day period while the yaw error in a three-axis stabilized satellite does not but still repeats every day. Figure 2 shows the Yaw error for both types of satellites [3]. Yaw Attitude : NM 0 .0 1 0.8 0 .0 0 9 Three-axis 0 .0 0 8 0 .0 0 7 0 .0 0 6 0 .0 0 5 0.4 0 .0 0 4 0 .0 0 3 0.2 0 .0 0 2 0 .0 0 1 0 0 -0 .0 0 1 -0 .0 0 2 -0.2 -0 .0 0 3 -0 .0 0 4 Dual-spin -0.4 -0 .0 0 5 -0 .0 0 6 -0 .0 0 7 -0.6 Yaw Angle of Dual Spin Satellite (Deg) Yaw Angle of 3-Aix Stabilzed Satellite (Deg) 0.6 -0 .0 0 8 -0 .0 0 9 -0.8 0:00 -0 .0 1 1:00 2:00 3:00 4:00 5:00 6:00 7:00 8:00 9:00 10:00 11:00 12:00 13:00 14:00 15:00 16:00 17:00 18:00 19:00 20:00 21:00 22:00 23:00 0:00 Time hh:mm (GMT) Yaw T3 Colinearity Region Yaw T3 Colinearity Region Yaw T2 Yaw T2 Figure 2 Yaw error angles of dual-spin stabilized and three-axis stabilized satellites in a day. 3. Satellite Co-Location Figure 3 Polarization Discrimination With orbital slots for placing geo-satellites are limited, it is necessary to operate a group of satellites sharing the same orbital slot, which is so called co-location. The idea of co-location is to maintain more than one satellite in the same tolerance window. Thaicom2 and 3 satellites are collocated at the same orbital slot at longitude 78.5 degrees East. Thaicom2 frequencies are reused with opposite polarization in Thaicom3. That means these two satellites are able to get the significant effect from the cross-polarized signal of each other. One suspected factor of this study is the separation between the co-located satellites. The colocation strategy for these satellites, inclination and eccentricity separation, is to place them in the different orbital plane. Their orbital planes are differently inclined from the equatorial plane. Therefore, this should be one factor to affect the behavior of the cross-polarized signal. 5. Faraday Rotation 4. Cross Polarized Antenna Pattern The cross-polarization of a source is becoming of increasing interest to satellite communication antenna designers. The case of an antenna transmitting, or receiving, a linearly-polarized field, the cross-polarized component is the field at right angles to this co-polarized component. For example, if the co-polarized component is vertical, then the cross-polarized component is horizontal Of importance in a dual polarization frequency reuse satellite communication system is the polarization discrimination, previously cited as the isolation, between the copular and cross-polarized signals, especially in the antenna main beam region as illustrated in Figure 3.[7] The Faraday rotation causes the linearly polarized signal to rotate its polarization plane as it passes through the Ionosphere about 100 km to over 400 km above the earth. Thus, its effect is to rotate the polarization plane of the signal as similar to the effect from satellite rotating its Yaw angle. The rotating polarization angle from Faraday rotation, , is (C / f 2 ) TEC where radians (3) C is a constant equal to 2.36 10 4 Bav and TEC is the Total Electron Content [4]. The TEC profile for a location, although varies from year to year, does not change much over years. It reaches its bottom around before sunrise and its maximum in the afternoon [5]. 6. Relation to Cross-Polarized Signal The calculated cross-polarized signal based on the three parameters is (Tx _ xpolpattern( )) 2 Xpol (dB) Copol (dB) 10 log 2 sin ( FR Yaw ) (4) where, Tx-xpol-pattern() is the transmit cross-polarized pattern for LM4 at , the separation angle between Thaicom 2&3. Note that XPD of the antenna is Tx-xpolpattern( = 0). FR = the angle of the polarized plane rotated by Faraday rotation, yaw = Yaw error angle, = the angle caused by Faraday rotation at the time the antenna’s polarization was adjusted. is estimated. The “+/-“ in front of yaw is unknown because we do not know the direction of the angle of the polarization plane rotated by the Faraday rotation relative to that rotated by the yaw error. If both rotations are in the same direction (say counter-clockwise), the sign is “+”. The sign was selected based on how well the calculation fits the measured data. 7. Data Measurement and Results The test and measurement was performed at the Thaicom Satellite Control Station in Nonthaburi, near Bangkok, Thailand during October 2001 to February 2003. The measurement was done automatically using the HPVEE program [6]. Figure 5 Test data collected during the same period for the test signal and the telemetry. The measured data is compared with the calculation. However, it was perplexing why the cross-polarized signal from Thaicom-1 varied as in Figure 5. As an effort to find the cause, we added the effect of Faraday rotation by using the TEC data during the same days but year 1996 (Figure 6) to represent the TEC data in year 2002. 7.1 Effect of Yaw of Dual-Spin Stabilized Satellite The cross-polarization of the receive antenna was adjusted at the zero yaw error angle on Feb 19, 2002. The zero yaw error is defined as the position where the satellite’s yaw is in the middle of its yaw variation window. Figure 4 shows the test data collected during the same period for the test signal and the telemetry. Both signals are varied at about 6 to 8 dB. The calculated crosspolarized test signal is shown in Figure 5. The peak-topeak amplitude is about 0.05 to 0.15 dB. Although the calculated cross-polarized signal resulted from the satellite’s yaw error and the measured crosspolarized signal have more or less same peak time, the amplitude of variation from calculation could not match that of the measured signal. Thus, we conclude that the satellite yaw angle variation alone partially explain the variation in the cross-polarized signal. Figure 4 Yaw error angle, Delta Yaw angle, and calculated cross-polarized signal level when the polarization was adjusted at zero Yaw error angle Figure 6 Average TEC profile for Bangkok and Chiang Mai in Feb 1996 [5]. We found that the estimated rotating polarization angle from the Faraday rotation does match quite well with the measured data in term of peak time and the look of the curve (Figure 7). Both calculations based on “+” and “-” signs match quite well with the measured data. This matching helps to confirm that the Faraday rotation should have an effect on the cross-polarized signal variation at CBand. Note that the small difference in the two calculated signals is due to the Yaw error. Figure 7 Measured cross-polarization variation of Thaicom-1’s telemetry and calculated variation from Faraday rotation 7.2 Effect of Yaw of Three-Axis Stabilized Satellite The result of the test to verify the effect of the yaw error angle to the variation of the cross-polarized signal in the environment of Thaicom-3 satellite is shown in Figure 8. Again the yaw error alone cannot explain the measured variation. The effect of the Faraday rotation should be included in order to explain the variation as shown in Figure 9. Since the antenna pattern for co-polarized signal is very symmetrical in azimuth and elevation angle, the composite angle or "angle distance" at a particular azimuth angle (Az) and elevation angle (El) can be calculated as: Composite angle Az'2 El 2 (5) Since the earth is spherical, the azimuth angle in the composite angle must be scaled down by [1] Az ' CorrectionFactor Az ' where Az is calculated from Az ' Az sin cos( El ) sin 2 2 (6) (7) Figure 8 Test data collected during the same period for the test signal and the telemetry. The measured data is compared with the calculation based on yaw error angle. Again, the estimated polarization angle rotation was based on the TEC data in year 1996, not in 2003 the time of the measurement. This surprising match strongly suggests that the Faraday rotation should play a major role in the variation of the cross-polarized signal. Note that the yaw error angle in the shaded stripes is ignored because the yaw error angles in these periods are not real due to the co-linearity of the satellite and the sun. Figure 10 Relative Latitude and Longitude of the Thaicom-2 seen by the LM4 antenna which is tracking Thaicom-3 satellite during 6-9 December 2002. The calculated co-polarized signal is derived from the co-polarized receive antenna pattern at the composite angle. The calculated co-polarized signal matches well with the measured signal (Figure 11). For cross-polarized signal, the horizontally polarized signal was uplinked from LM4, which was tracking to Thaicom-3. Its cross-polarized signal, which was vertically polarized, went to Thaicom-2 and received by LM1 antenna that was tracking Thaicom-1 satellite (see illustration in Figure 12). Figure 9 Measured and calculated cross-polarized telemetry signals from Thaicom-3 based on Faraday rotation and yaw error angle. 7.3 Effect of Yaw and Satellite Movement Since the LM4 antenna is tracking Thaicom-3 satellite, it sees Thaicom-2 satellite moves as shown in Figure 10. The position in latitude and longitude of Thaicom-2 satellite seen by LM4 antenna can be translated into the azimuth (Az) and elevation (El) reference plane of the LM4 antenna by using standard Az/El equations as in [1]. Figure 11 Comparison between the test data and the calculated data of co-polarized signal variation due to the satellite movement 2 Telemetry 1 Variation in Sig1&1_2 depend on Uplink cross pol. pattern &distance between T2-T3 THAICOM2 V H Variation in Sig 2_3 depends on downlink Co pattern & distance between T3-T2 H V Var 1_3 = Var 1_2+Var 2_3 Up lin k k lin wn Do THAICOM3 V pol X-signal V' H pol H Co-signal T2-11m TrckAnt. LM1 T3-11m TrckAnt. LM4 1_2 V pol T3-11m TrckAnt. LM4 H pol 1_3 2_3 Figure 12 Signal path and polarizations for the crosspolarized signal used in the test configuration. Because the test results in the previous section strongly suggest that the Faraday rotation plays a major role in the rotation of the polarization angle, the variation of the received cross polarized signal at LM1 should have reflected the combined effects of the following three factors: (1) The uplink cross-polarized pattern due to the separation of Thaicom-2 from Thaicom-3, which was the direction the LM4 antenna was pointing to, (2) Yaw Error of Thaicom-2, and (3) Faraday Rotation on the uplink path through the Ionosphere. How well the calculation base on Equation (4) matches with the measurement is shown in Figure 13. Again, the data for TEC during the test time in 2002 is estimated from the data in year 1996. The calculated data matches quite well with the measured data in term of the peaks occurred at about the same time as the measured data. The selection of the parameter was done by visual inspection with the constraint that its value should be within the maximum and minimum angle of the variation. The two calculated signals based on “+” (additive) and “-” (subtractive) of the combination between yaw error angle and the Faraday rotated angle are very similar. This is again due to the small yaw error angle. Figure 13 Comparison between the test data and the calculated data of cross-polarized signal variation due to the satellite movement, yaw error and Faraday rotation. 8. Conclusion From the testing and measurement, it can be seen that the variation of the cross-polarized signal is mainly caused by two effects: (1) satellite movement of the two orthogonally-polarized satellites and the cross-polarization pattern of the earth station antenna and (2) the Faraday rotation of the polarization plane of the signal when it passes through the ionized layer of the Ionosphere. The yaw error angle of the satellite which was one of the two original suspecting factors turns out to have a small effect on the variation of the cross-polarized signal. Although the effect of the Faraday rotation was not originally considered in the study, it turns out from the test data that it could play a major role in describing the rotation of the polarization angle of the cross-polarized signal in uplink and downlink paths. Many literatures confirm that it does have a significant effect in the C-band environment (3-4 GHz) which is the environment in our tests. Its effect though could be ignored for the Ku-band environment (12-14 GHz) since the rotating polarization angle inversely depends on the square of the frequency. The result of this thesis study can be used to improve the link quality and improve the cross-polarization interference of one satellite link to the others by minimizing the amount of the variation in the crosspolarized signal. Specifically, there are two main benefits of the study: (1) Find the best time to do the antenna azimuth/elevation pointing and polarization adjustment (2) Calculate the minimum XPD the satellite can expect to experience. Equation (4) suggests that the adjustment to minimize the cross-polarized variation could be done independently between the polarization angle which is the feed angular position of the antenna and the Azimuth and Elevation angles of the antenna. The polarization angle should mainly depend on the Faraday rotation effect while the Az/El angles depend on the relative position of the crosspolarized satellite to the antenna. This independence helps to separate the antenna adjustment and minimize the crosspolarized variation at different time. Regarding the Faraday rotation effect, the antenna polarization should be adjusted at the time when the Total Electron Content (TEC) is around its mean. This ensures that the variation of the polarization angle is minimized. Regarding the satellite movement effect, there are two cases to consider: tracking and non-tracking antenna. Case 1: Tracking Antenna. The azimuth and elevation angles of the antenna are tracked automatically according to the satellite movement of the co-polarized satellite. Thus, there is no need to find the best time for Az/El pointing. However, the polarization of the antenna is not adjusted by the tracking mechanism and it is adjusted manually by the installer or operator. Thus, the best time to adjust the polarization should follow the rule for the Faraday rotation above. Case 2: Non-Tracking Antenna. The Az/El of the antenna and the polarization angle of the antenna feed must be adjusted to its best position manually. The rule to adjust the Az/El is to achieve the best position where the variation of the cross-polarizes signal is minimized. The time for Az/El adjustment depends on the cross-polarized pattern. For simple case like the case in Figure 3 where the cross-polarized pattern with peak at the boresight and, within the satellite movement in the station keeping box, rolls off monotonically as the angle is further away from the boresight, the best position of the antenna is to have boresight at the center of the satellite station keeping box. This can be done by adjusting the Az/El of the antenna when the co-polarized satellite is at the middle of the satellite station keeping box. 9. Acknowledgement The authors would like to acknowledge Shin Satellite Plc. for the test location and equipment support. 10. References [1] [2] [3] [4] [5] [6] [7] Tri T. Ha, Digital Satellite Communications, Second Edition, McGraw-Hill, Singapore, 1990. Constantine A. Balanis, Antenna Theory Analysis and Design, John Wiley & Sons, Singapore, 1938. Shin Satellite Public Company, Nonthaburi, Thailand J.A. Allnutt, Satellite to Ground Radiowave Propagation, Peter Peregrinus, London, 1989. Kan Laopipattana. Study of Ionospheric Electron Content by Using GPS Satellites Signals. M.S. Thesis, King Mongkut’s Institute of Technology Ladkrabang, 1997. Hewlett-Packard Company, Controlling Instruments with HP VEE, 2nd ed, USA, 1998. B. Claydon, Antennas for VSAT systems. In J. Everrett, ed. VSATs: Very Small Aperture Terminals, Peter Peregrinus, London, 1992.