, B")
Mechanical scanning methods
TEAS
1.6.11
-00
Related Topics
Ultrasonic echography (A-scan), B-mode, resolution, artefacts, interface, and mechanical scanner
Principle
The fundamental principles concerning the generation of ultrasonic B-scans (brightness scans) are
demonstrated with the aid of a simple test object. The image quality characteristics, such as the zone of
focus, resolving power, and artefacts, are explained.
Equipment
1
1
Basic Set “Ultrasonic echoscope”
consisting of:
1x Ultrasonic echoscope
1x Ultrasonic probe 1 MHz
1x Ultrasonic probe 2 MHz
1x Ultrasonic test block
1x Ultrasonic cylinder set
1x Ultrasonic test plates
1x Ultrasonic gel
Extension set: Ultrasound computed tomography
consisting of:
1x CT scanner
1x CT control unit with tomography software
1x Water tank
1x CT sample
Vernier calliper
Ruler, plastic, 200 mm
1
Additional equipment
PC with a USB port, Windows XP or higher
1
1
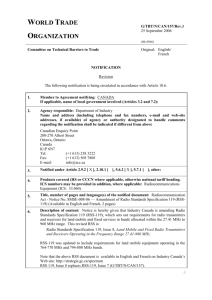
Fig. 1:
13921-99
13922-99
03010-00
09937-01
Equipment for mechanical scanning methods, experimental set-up
www.phywe.com
P5161100
PHYWE Systeme GmbH & Co. KG © All rights reserved
1
TEAS
1.6.11
-00
Mechanical scanning methods
Caution!
Pay close attention to the special operation and safety instructions in the manual of the ultrasonic echoscope.
Tasks
1. Determine the sound velocity of water and acrylic glass with the aid of the B-scan and the known
dimensions of the test block.
2. Study any artefacts that occur.
3. Compare the resolution and zone of focus of 1 MHz and 2 MHz ultrasonic transducers.
Set-up and procedure
Fill the tank with water and place the test block in the middle of the tank and align it lengthwise. The
water level in the tank should exceed the test block by at least 3 cm. If there is still some air trapped
in the holes, it must be removed by slightly tilting the block. The block should be arranged so that
the smaller holes (or the double hole) face upwards.
Position the mechanical CT-scanner system above the tank as shown in Figure 1.
Fasten the test head with the wall holder to the CT-carriage. If there are air bubbles on the
transducer or test block surface, they must be removed.
Prepare the echoscope and the CT-scanner (read the manual of the echoscope and CT-scanner).
Connect the echoscope and the CT-scanner to the PC.
Connect the CT-scanner to the drive unit. Use the buttons “Rotation” and “Translation” in order to
test whether the scanner can be controlled with the control unit (the carriage moves and/or the wall
holder rotates).
Set the selector switch of the echoscope to “Reflection”.
Connect the 2 MHz probe to the “Probe (Reflection)” port.
Adjust the height of the scanner so that the transducer is located approximately 2 cm above the test
block surface. Move the CT-carriage sideways so that the transducer is located approximately 2 cm
next to the block.
Set the echoscope “Gain” to 35 dB and the “Output” to 30 dB. TGC is not used. Set the measuring
depth in the software to “full”, i.e. to 200 µs.
Use the time scaling for the entire experiment, which means that the x-axis of the A-scan will be
displayed in µs. As a result, the setting of the sound velocity does not affect the scans that are
produced.
2
PHYWE Systeme GmbH & Co. KG © All rights reserved
P5161100
Mechanical scanning methods
-
-
-
-
TEAS
1.6.11
-00
Actuate the selector switch “Use CT Scanner” in the software. Now, the system can be controlled
with the aid of the software. The direction of travel can be tested with the button “Move Free”.
Enter 200 mm as the path length and start a measurement.
The image contrast can be optimised with the aid of the controllers under “color scale”. The image
that results can be used to verify whether the scanner moves horizontally above the block. If
necessary, the height adjustment of the scanner must be corrected.
Calculate the sound velocities of water and acrylic glass. To do so, measure and record the times
that are displayed in the scan with the aid of the software. Activate the measuring function by
simultaneously clicking the right and left mouse button. The left mouse button defines the starting
point and the right mouse button the end point. The difference between the two coordinates is
displayed in the upper right-hand corner of the image. Only the y-direction of the scan is of interest
for the evaluation (in the upper scan, the displayed value would be 27.3 µs). When surveying the
scan, always select the upper edge of the corresponding reflex. If it turns out that the block had not
been measured in a completely horizontal position, you can measure the times on the right and left
side of the scan and then take the average.
Try to avoid any unwanted multiple reflections on the test block surface. To do so, change the
scanner height so that the transducer moves as closely over the test block as possible. It is once
more important that the distance between the transducer and the test block remains the same over
the entire measuring distance if possible. Move the transducer manually over the test block with the
CT control unit and observe the distance between the transducer and the test block from the side.
The smaller the distance, the better the scans. Reduce the measuring depth to 100 µs (click the
“Half” button in the A-scan window). This will improve the B-scan. The “water-passing” bottom echo
is of no interest for these measurements.
Fig. 2: Scan with a depth of 200µs
www.phywe.com
P5161100
PHYWE Systeme GmbH & Co. KG © All rights reserved
3
TEAS
1.6.11
-00
-
Mechanical scanning methods
Repeat the same measurement with the 1 MHz probe. Compare the resolution of the two B-scans.
-
Software
The “measure Ultra Echo” software records, displays, and evaluates the data that are transferred from
the echoscope. After the start of the program, the measuring mode is active and the main screen “AScan mode” is displayed. All of the available actions and evaluations can be selected and started in this
window.
The upper part of the main screen shows the A-scan signal, the frequency of the connected transducer,
and the operating mode (reflection/transmission). The current positions of the cursors (red and green
line) are displayed at the bottom of the window. The cursors can be positioned by a mouse click. The
time of flight is displayed under the cursor buttons.
Theory and Evaluation
The ultrasonic echography (also sonography) has become one of the most important investigation
methods in medical and materials science applications. In spite of the enormous number of ultrasonic
devices that are available for all sorts of applications, they are all based on the same fundamental
principle of the transmission of a mechanical wave, its reflection, and its recording in an echogram.
In a sectional ultrasound image (B-scan), the echo amplitude is displayed as a greyscale value and the
time of flight as the penetration depth. A string of several adjacent depth lines leads to the sectional
Fig. 3: B-scan with a depth of 100 µs
image. For this purpose, the probe must be moved lengthwise over the area of examination. The local
resolution along this scanning line results from the position of the probe or its speed of movement. A
simple way to produce a sectional image is to move the probe slowly by hand (compound scan).
However, in this case, a precise lateral resolution is only possible with the aid of additional coordinate
acquisition systems, such as linear scanners. On the other hand, thanks to the slow scanning speed,
high-quality images can be produced over extended examination areas. The image quality is determined
4
PHYWE Systeme GmbH & Co. KG © All rights reserved
P5161100
Mechanical scanning methods
TEAS
1.6.11
-00
by the following parameters:
-
precise, coordinate-based image point transmission (scanner system)
axial resolution (ultrasound frequency)
lateral resolution (sound frequency, sound field geometry)
greyscale resolution (transmission power, gain, TGC)
number of lines (scanning speed)
aberrations (acoustic shadows, multiple reflections, movement artefacts)
The resolution corresponds to the smallest possible distance between two points (or two point-shaped
reflectors) that can just about be discriminated. One distinguishes the axial resolution (in the direction of
the propagation of sound) and the lateral resolution. The axial resolution is determined by the length of
the sound pulse and by the wavelength or frequency. The resolution increases with the frequency. On
the other hand, a higher frequency also results in a higher attenuation so that measurements can only be
performed in near-surface areas if the frequency is very high.
The lateral resolution is determined by the width of the sound field. It depends on the frequency and the
oscillator diameter. The lateral resolution can be improved by focussing. The emission of sound fields by
a surface emitter already leads to a bundle that diverges with a certain angular width (see also Fresnel
zone or near field). In addition, there are several methods for optimising the focussing in a certain depth
or over a certain area. Acoustic lenses and multi-array transducers are examples. Multi-array transducers even enable dynamic focussing changes thanks to the different response characteristics of the individual elements.
Results
Figure 4 shows the B-scan of the test block. The height of the scanner is adjusted so that the transducer
is located approximately 2 cm above the test block surface. The interpretation of such a B-scan requires
a certain degree of experience. The various reflexes must be assigned. Superpositions and multiple
reflections may produce artefacts that need to be interpreted accordingly.
www.phywe.com
P5161100
PHYWE Systeme GmbH & Co. KG © All rights reserved
5
TEAS
1.6.11
-00
Mechanical scanning methods
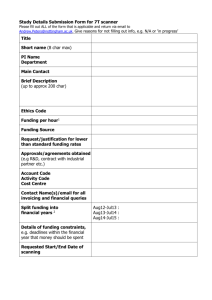
Fig. 4: B-scan, reflexes of the test block
t0: Reflex of the tank bottom caused by water
t1: Reflex of the test block surface
t2, t3: 1st and 2nd multiple reflex of the test block surface
t10: Reflex of the bottom surface of the test block
t20: Beginning of a hole
t21: End of a hole
The most striking artefact in the scan is the multiple echoes of the block surface that are represented as
horizontal lines in the image (t2, t3).
The reflex of the bottom of the test block (t10) does not form a continuous line. This is due to the
acoustic shadows that are cast by the holes so that no or only very little sound reaches the bottom of the
block in these places. The second “dashed” bottom echo is caused by the reflection on the lower edge of
the tank bottom.
Each of the holes is represented by two reflexes, one at the upper end and one at the lower end of the
hole (e.g. t20, t21). Another artefact in the right-hand area of the images is formed by the multiple
reflexes of the near-surface holes below the 2nd surface reflex.
The times of flight t0 and t10 represent the same depth, i.e. the surface of the tank bottom. The time
difference is due to the different sound velocities on the two sound paths. As far as t0 is concerned, the
sound travels solely through water, whereas in the case of the t10, it passes through water at first (t1)
until it reaches the block surface. Then, it passes through the acrylic block. Since the sound velocity in
acrylic glass is higher than in water, the reflex that passes through the acrylic glass appears earlier than
the reflex that passes through water.
The times of flight of Figure 4 are listed in Table 1.
6
PHYWE Systeme GmbH & Co. KG © All rights reserved
P5161100
TEAS
1.6.11
-00
Mechanical scanning methods
Table 1: Time-of-flight measurements (Fig. 4).
Times of flight [µs]
Right
Left
Measured value
t0
132.9
130.6
131.8
t1
24.1
22.6
23.4
t2
49.1
47.1
48.1
t3
74.4
70.3
72.4
t10
82.9
81.8
82.4
t20
63.1
t21
69.8
For our evaluations, we start out from the known dimensions that we use to calculate the sound
velocities. The dimensions of the blocks are shown in the drawing in Figure 5.
For the above-mentioned measurements, the height of the block and the diameter of the 7 th hole (counted from the right-hand side) are of interest. (Block height = 80 mm, diameter of the 7th hole = 5 mm).
In order to calculate the sound velocities, we need the length and the corresponding times of flight of a
Fig. 5: Schematic representation of the test block
known distance in a medium:
Block height: s = 80 mm
tW = t0 - t1 for water
tA = t10 - t1 for acrylic glass
The following general rule applies:
v
s
t
However, since the measurements have been performed with a reflection, the to and fro distance must
be taken into consideration:
v
2s
t
Water:
vW = 2 * 80 mm/(131.8 µs – 23.4 µs) = 1476 m/s
Acrylic glass:
vA = 2 * 80 mm/(82.4 µs – 23.4 µs) = 2711 m/s
The values correspond rather well to the values that are stated in the literature.
www.phywe.com
P5161100
PHYWE Systeme GmbH & Co. KG © All rights reserved
7
TEAS
1.6.11
-00
Mechanical scanning methods
The diameter of the 7th hole can then be calculated as follows:
t = t21 – t20 = 6.7 µs
s = v * t/2 = ½ * 1476 m/s * 6.7 µs = 4.94 mm
According to the drawing, the diameter is 5 mm. During the measurement, one must take into
consideration that the hole is filled with water, since – in this case – only the upper edge of the hole is
discernible.
If one tries to suppress the unwanted multiple reflections on the test block surface by bringing the
ultrasonic probe closer to the test block, another artefact appears in the 1-Mhz-image, i.e. double
reflexes at the near-surface holes. Further down, these double reflexes decrease due to the damping
effect. The reason for these double reflexes is the fact that the distance between the transducer and the
block is still too long. The sound that is reflected by the hole is reflected once more between the block
surface and the transducer, thereby generating a second reflection pulse after the first one. (If the sound
velocity of water is known, the distance between these reflexes can be used to determine the distance
between the transducer and the block).
A comparison of the axial resolution and the zones of focus of the 1 MHz and 2 MHz transducers shows
that the axial resolution is improved when a 2 MHz probe is used and that the edges of the holes are
represented more sharply, which is due to the fact the sound pulse is considerably shorter at 2 MHz than
at 1 MHz. The double hole in the upper left-hand corner of the image is separated in an approximate
manner only by the 2 MHz transducer. (It is not until at 4 MHz that the two holes can be clearly
distinguished.)
1 MHz
2 MHz
Fig. 6: Comparison of the B-scan of the test block measured with a 1 MHz transducer and then with a 2 MHz transducer
The near-field zone of the 1 MHz transducer lies theoretically at approximately 2.4 cm. Here, the holes
are represented in their most narrow form (4th hole). In the case of the 2 MHz transducer, the
considerably larger near-field zone causes the near-surface holes that are represented to be too large in
the lateral sense.
8
PHYWE Systeme GmbH & Co. KG © All rights reserved
P5161100
, B")