Sample problem
advertisement

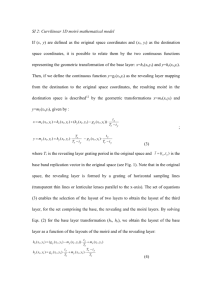
Chapter 15-16. Shadow Moiré .Projection Moiré. Basic Relationships, Moiré contouring. Applications Sample problem 15-16 -S1 In the literature of projection (shadow) moiré it is customary to utilize a single direction grating. This seems contradictory with the conclusions of sections 15.3 and 15.4, that require the projection of a system of orthogonal lines to recover a surface. Conceptually what is the discrepancy between basic differential geometry arguments and actual practice? Solution to 15-16 –S1 The question is connected to the accuracy with which a surface can be recovered from its sampled version. The idea of projection moiré is the capture depth information on the basis of modulating a carrier with the profile of the surface. To get information within certain accuracy it is necessary to get a sampling rate that satisfies the Nyquist condition. One must be aware that the performed sampling is directional, that is, one recovers projected components of the distance of a surface to a reference plane. This fact can be observed in Figure 16.21. This is the case of a complex surface made out of different geometrical components. This surface has been sampled in two orthogonal directions. The base that supports the analyzed surface is a rectangular plate. From Figure 16.21(a), (b), or (c) one can compute the displacement of the rectangular surface with respect to the camera in the horizontal direction. If one wants to do the same computation with Figure 16.21(d), (e), (f), it is not possible. The following is a very simple but direct explanation, if the projected lines are perpendicular to the rotation axis of a plane, a moiré pattern will not be produced upon rotation of the plane and superimposition of the initial and final recordings of the plane. If the grating lines are perpendicular to the axis of rotation of the plane the pitch of the grating remain unchanged by a rotation around an axis contained in the plane and perpendicular to the grating lines. Hence the moiré method is insensitive to the motion of the surface in this particular example. One can ask the additional question: Why it is possible to reconstruct a profile of a surface with one single system of lines? There are many aspects to this question. One answer valid in many cases is the fact that, because of the symmetry conditions of the surface (surfaces of revolution for example) the principal directions of the curvature radii are known. Of the three unknowns that are necessary to define the curvatures of a region, one unknown is given by the symmetry condition. Furthermore since a composite surface is made in many cases of known geometrical shapes, this knowledge facilitates the recovery of the total surface. A second question to be answered is: Is it possible to get information about normals and curvatures from a cloud of points defining a surface? The answer is yes, a method to achieve this objective is the representation of the surface by polygonal elements. One of the methods is the utilization of triangular meshes. The method of triangular meshes is a method of computer graphics that adapts 3-D information in computer graphics to render 3-D shapes from clouds of points. In the process of obtaining the 3-D shape, quantities like normals and curvatures are obtained from the mesh information. This implies to generate first and second order differential properties. Since surface meshes are piecewise linear surfaces, the notion of continuous normal vectors or curvatures poses non trivial problems. Meanwhile through the use of sections in two orthogonal directions is possible to retrieve directly the first and second order derivatives greatly simplifying the process of getting normals and curvatures. Figure P15-16.1 Projection of orthogonal carriers on the stereolithographic sample 15-16 -S2 In Figure P15.16.1 shows in more detail the stereo lithography sample and the moiré pattern resulting from a horizontal carrier (f), the vertical carrier marked (c) in the figure. It is evident that the horizontal carrier density of lines is not enough to define some of the details of the sample. Discuss the reasons that makes this statement correct. Solution to 15-15 –S2 To get information within certain accuracy it is necessary to get a sampling rate that satisfies the Nyquist condition. From the visual inspection of P15-16.1 it is possible to see that he sampling frequency in the horizontal direction is not enough to define the radius of curvature of the cylinders with circular profile. The vertical grating sampling frequency defines accurately the radii mentioned before. See Figure 16.24 (b). 15-16 -S3 Utilizing the derivations done in Section 15.4, give the expressions for the necessary derivatives to get the normal and the curvature at a given point of a surface. Solution to 15-16 –S3 One can start with equation with equation (10.33), I( x) Ioc I1c cos2fc x ( x) This equation provides the irradiance in a carrier in the x-direction. In this general case we have utilized ( x ) to represent the modulation function. Utilizing the notation of Chapter 13, equations (13.36) and (13.37), I p ( x, y ) I 0 I1 ( x, y ) cos 2f cx x x ( x, y ) I q ( x, y ) I0 I1 ( x, y ) sin 2f cx x x ( x, y ) Adopting this notation to the case of a surface, x ( x, y) is the profile of the surface expressed as a phase so that (13.44), Fx p x ( x, y ) ( x, y ) x 2 x Where Fx is the profile of the surface in the x direction. Similarly, Fx p x ( x, y) ( x, y ) y 2 y where the derivatives are obtained directly from the modulated carrier. In the y direction, Fy p y ( x, y) y 2 y Fy p y ( x, y) ( x, y ) x 2 x ( x, y) In the notation from (15.12) and using Cartesian axes-x-y Fx Fy i j x x F F Gy x i y j y y And F F F F F Ex G y x x y y x y x y Ex E x 2 Fx Fy 2 i 2 j x x x 2 G y 2 Fx Fy i j y y 2 y 2 The quantity F’, 2 2 Fx Fy F' i j xy xy With the above notation, E x G y , M N F' , N A N N , L N y x Ex Gy Ex Gy Problems to solve 15-16.1 Figure P15.16.2 shows the intersection of the sphere and the cone of the stereo-lithography sample. The pitch of the projected grating is po=254 μm, the angle of illumination of the beam is θ=14.04° and the projected pitch pj=2508 μm. Figure P15.16.2. Stereo -lithography sample. Carriers in two orthogonal directions. po=254 μm; θ=14.04°; pj=2508 μm Utilizing the equations of problem 16-15 -S3 obtain the normal at the point P indicated figure P15.16.3. Figure 15.16.3. Point P to calculate the normal to the stereo-lithography sample. 15-16.2 Determine the principal radii of curvature of the stereo-lithography specimen at the point P. 15.16.3 The method of contouring has been applied to the analysis of a buckling problem. Fiber reinforced panels for aeronautical applications were subjected to axial compression. The specimen is clamped at both ends and was loaded in a MTS testing machine with controlled displacements. Figure P15-16.4 shows the set up and the schematic representation of the optical system. Three different displacements were imposed, 0.5 mm, 1 mm and 1.5 mm. Figure P15-16.4.Buckling test of composite panel. Left testing machine and camera, Right geometrical configuration of the optical set-up. The projectors are inclined of an angle of 18o with respect to the plane of reference. The pitch of the grating is po=317.5 m, the projected pitch is pj=3644.44 m. The sensitivity is pj S 5575.99m 2 tan The size of the panel is width w=162 mm, height h=263 mm, thickness 1.5 mm. Utilizing the developments of Section 16.8 determine the deflection of the composite panels. Get the phases of the left and tight projectors and then through subtraction get the deflection of the panel. a) b) Figure P15-16.5. Composite panel reference plane recording. (a) left projector, (b) right projector. Figure P15-16.6. Composite panel, thickness 1.5 mm loaded recording (a) left projector, (b) right projector. Figure P15-16.7. Composite panel, contour of the panel for 1.5 mm displacement.