Dashevskii O., Nejevenko E.
advertisement

237
ADAPTIVE YAW COMPENSATION FOR TOWED ARRAY WITH
SYNTHETIC APERTURE
O.Yu. Dashevskii1, E.S. Nejevenko1
1Russian
Federation, Novosibirsk, Koptyug str., 1, 630090
Tel.: +7 3833 356490, Fax: +7 3832 333863
E-mail: od@lab15.iae.nsk.su, nejevenko@iae.nsk.su,
Results are presented for software modeling of towed synthetic aperture array. Research
was aimed at studying influence of such factors as additive noise and yaw on aperture
synthesis quality. Adaptive yaw compensation technique is suggested, involving yaw
angle evaluation based on peak quality maximization criterion.
Introduction
The subject of this paper is towed arrays with
synthetic aperture (both passive and active synthetis) locating moving objects at long distances. Long distances mean low frequencies (there
are other methods for observing static scenes,
i.e. bottom exploration at short distances). One
of the first papers in the field [1] formulates
main difficulties to be encountered while implementing this fruitful idea of aperture synthesis, which has become revolutionary for radiolocation. One of these difficulties, also
proved in further research [2], is array beam
pattern distortion due to platform yaw, which
leads to errors in target bearing angle determination.
Mathematical model for synthesis
The synthesis technique will be omitted here,
since it has already been described many times
[3,4]. It’s useful both in passive and active location (moreover, as shown in [6], there’s no
such big difference among these two for longdistance sound propagation). The mathematical model is as follows. Towed array is a uniform-spaced one consisting of N hydrophones
with spacing Δ, oriented across x coordinate
axis. The real aperture length in this case
is Δ(N-1).
Platform moves along its axis with velocity υ0.
There are M harmonic sound sources in space,
given by amplitude Am; fm — frequency; location rm = (xm,ym,zm) [m = 1...M]. Synthesis occurs by proper choosing of time moments tL =
τ (L - 1), such that x1(tL+1) = xq+1(tL), that is in τ
seconds platform moves by distance q Δ (q
array spacings).
There happens to be an overlap in such case:
last N-q hydrophones at moment tL are located
in the same places as first N-q hydrophones at
tL+1. The overlapping parts of vectors X(tL) and
X(tL+1) (X(t) is a N-sized complex vector with
hydrophone data at time moment t) apparently
contain the same space information and differ
only by phase factor dependent upon τ. This
fact is used, as described in [7], to phasecorrect X(tL+1) and append it to X(tL) (so-called
ETAM algorithm). Aperture length increases
by q after that. Using this principle repeatedly,
one may theoretically increase aperture size by
any q multiple. Let this process happen J times
(giving total aperture size N+Jq). J+1 measurements are needed in this case at t=0, τ,
2τ,..., τJ. We’ll denote X(τL) by X(L), L = 0...J.
Then before synthesis we’ll have J+1 vectors
X(0)...X(J). Given that, Y(0)...Y(J) will be vectors
with synthetized data (sized N+Jq). Let at first
238
Y
(J )
{ X
(J )
T
0 ....... 0 } ,
(1)
that is, X(J) appended by Jq zeros. Calculation
is done in reverse order: Y(J-1) is calculated
from Y(J), Y(J-2) from Y(J-1), etc. At each step
L=J-1, J-2,..., 0 phase shift is calculated:
L arg{
1 N q ( L ) ( L1 ) *
},
X [ X k ] (2)
N q k 1 q k
where asterisk (*) means complex conjugation.
Then Y(L) is filled. That is, each step adds q
synthesized data values to N “real” ones, giving N+Jq values of Y(0) after last step. The elements of this vector can be expressed in this
way:
X k(0)
Yk(0) {
X
if
k N 1
(1[
])
q
N q 1 ( k N 1) mod q
k N 1
[
] i
L
q
L 0
e
k=1….N+1 …….N+Jq
In special case J=0 there’s no synthesis and
Y(0) just equals to X(0) (real aperture case).
Software model was developed in Matlab environment It allows to assign arbitrary number
of sound sources (given by coordinates, velocity vectors, frequencies) with additive white
noise and also set uniform-spaced towed array
parameters (N, Δ, velocity vector, yaw function). .
Classic Bartlett beamformer was used to obtain beam patterns.
a* ( , f )CYY a( , f )
,
S ( , f ) *
a ( , f )a( , f )
It was assumed that the relative position of target changed only due to array movement (the
target itself didn’t move).
Platform yaw influence on aperture
synthesis quality
Before the adaptive yaw compensation technique is described, let us evaluate yaw influence on beamforming with aperture synthesis.
For that purpose a numerical index is introduced, named “beamforming peak quality”.
It’s defined as peak (amplitude maximum)
value of a beam pattern (the peak indicating a
target presence), divided by this peak’s halfwidth (in degrees) at half-height (most papers
in this field take only peak height into consideration). If A=BF(α) is a maximum, then
Q
A
,
(l r ) / 2
(5)
Where BF(l)=BF(r)=0.7A. Representative value of Q in our model setting is in range
0…1000. Synthetic aperture quality is a relative peak quality (a quality of the peak resulted
from synthetic aperture processing divided by
the quality of peak for real aperture with the
same size as synthetic one). Bearing angle determination error is another synthetic aperture
quality criterion.
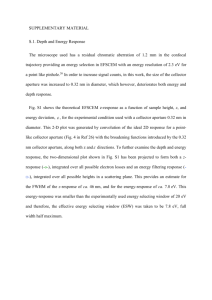
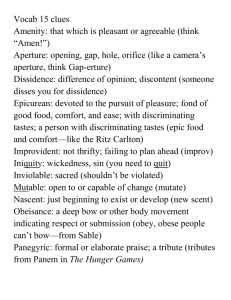
One of the study results is presented in Fig. 1,
a relative peak quality-noise diagram. Plot
shows that with noise intensification (decreased SNR) peak quality rapidly decreases.
(4)
where a(Θ,f) is a direction vector and CYY —
autocovariance matrix for Y(0).
The model settings was as follows. One sound
source with frequency 750 Hz; 20 hydrophones with spacing 1 m; platform velocity:
5 m/sec (9,8 kn); beamforming sector: 10;
distance to target: 80 km.
Fig.1. Relative peak quality dependence on noise level
239
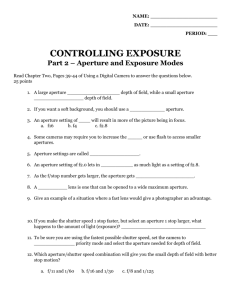
Figure 2 characterizes another criterion, showing bearing angle error dependence on uncompensated platform yaw angle (SNR=0 dB).
known. For aperture synthesis and beamforming one needs values of acoustic field
k
P(rexp.
(t )) for all appropriate k and t values,
but
instead
one
gets
k
P(rreal
(t ))
with
r (t ) r (t ) . Nevertheless, it’s possible to
k
exp.
k
real
k
k
(t )) using phase
get P(rexp.
(t )) from P(rreal
compensation.
Phase Φ to be compensated equals to
k
k
K (rexp.
(t ) rreal
(t )) , where K is the wave vec-
Fig.2. Bearing angle error dependence on
uncompensated platform yaw angle
The dependence is linear for real aperture as
expected. For synthetic aperture it oscilattes
about linear one, with maximum deviation being ~0.50, irrespective of argument.
The main conclusion from this experiment
(and other experiments, not described here) is
that with the presence of noise even small uncompensated platform yaw (in other words, an
error in platform course estimation) leads to
serious errors in beamforming, resulting from
improperly determined target bearing angle. A
way to handle this situation is by using adaptive bearing angle refinement procedure.
Aperture synthesis adaptive refinement
Platform yaw compensation is done as follows.
At any moment expected position of each hyk
drophone rexp. (t ) is known (k is hydrophone’s
number, between 1 and N). In our coordinate
system the platform moves along X-axis, that
is, velocity vector can be expressed as:
k
rexp
. (t ) [vt (k 1)d ,0,0] ,
(6)
where ν is velocity vector and d is array spacing.
In reality due to yaw hydrophones occupy othk
(t ) - considered as
er space positions rreal
tor. The task gets complicated by the fact that
the wave vector depends on the target bearing
angle which is unknown and, in fact, gets determined in all this processing. To overcome
this obstacle an iterative process can be used.
Indeed, having got any approximate value of
K, K(0), one can phase-compensate existing
data, mupltiplying field values by e i , then
proceed with aperture synthesis, do beamforming and obtain a peak corresponding to target
bearing angle. This also gets a refined value of
K, K(1). When value of K gets closer to its true
value, the peak will increase in height and decrease in width, that is, increase own quality,
which means resolution gain. The process can
be continued until [K(n)- K(n+1)] gets less
than some preset ε. Model experiments have
shown that with ε=10-4 four or five refinement
steps are needed. Adaptation procedure will be
described in substance, since its formal expression is too complex.
Kn+1=Peak(Beamforming(Etam(Compensation
(D, Kn ))))
Here Compensation function compensates difference between expected and real hydrophone
positions; Etam is an aperture synthesis function; Beamforming function corresponds to its
own name; Peak function determines wave
vector from a peak in beam pattern.
One last question is left, how to obtain initial
guess for iterative process. Beam pattern of
real aperture is used to get K(0). In spite of low
resolution, it allows to get an approximate target bearing angle, getting refined afterwards by
aperture synthesis and iterative yaw compensation process.
240
Conclusion
4
2
3
1
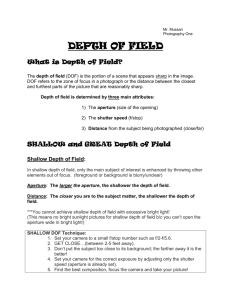
Fig.3. A result of adaptive yaw compensation
Typical adaptation result is presented on Fig.
3. Platform employs 20 hydrophones. Line 1
corresponds to a beam pattern for one platform
position (real aperture). Then synthesis is
done, using 10 more platform positions and
resulting in 120 hydrophones total. Platform
course changes, yaw angle is determined with
error, therefore it gets refined with adaptation.
Its result is presented by line 2, line 3 is a
beam pattern without adaptation, line 4 is a
beam pattern of real aperture employing 120
hydrophones. Apparently beam patterns for
real and synthetic apertures with the same size
are close to each other. The modeling was
done with for SNR = 0 dB.
The developed software model of aperture synthesis enabled us to study influence of main
factors, causing errors in beam patterns of synthetic aperture in comparison with real aperture. Adaptive target bearing angle refinement
technique was introduced, allowing to compensate course estimation errors. For synthetic
aperture to become widely used, one important
problem remains open, target movement compensation. To solve this problem it’s appropriate to use procedures, suggested in this paper.
References
1.
2.
3.
4.
5.
Ross E. Williams, “ Creating an acoustic synthetic
aperture in the ocean” J. Acoust Soc. Am.. Vol. 60.
No. 1, July 1976
N.C. Yen and W. M. Carey, "Application of synthetic aperture processing to towed-array data", J.
Acoust. Soc. Am., vol. 86, Aug. 1989, pp.754-765.
Stergios Stergiopoulos, “Implementation of Adaptive and Synthetic-Aperture Processing Schemes in
Integrated Active–Passive Sonar Systems” Proceedings of the IEEE, vol. 86, no. 2, February 1998
Karavaev V.V., Sazonov V.V. "Statisticheskaya
teoriya passivnoy lokacii." Radio i Svyaz, 1987.
Stergios Stergiopoulos, Edmund J. Sullivan “Extended towed array processing by an overlap correlator” -- J. Acoust. Soc. Am., vol. 86, July 1989, pp.
158-171