VALVE CONTROLLED SYSTEMS
advertisement

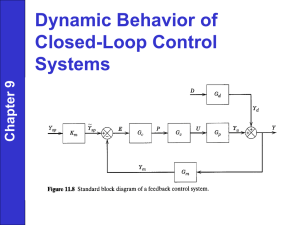
TEP4195 TURBOMACHINERY VALVE CONTROLLED SYSTEMS 1 Load characteristics Mechanical loads are usually considered to consist of stiffness, friction and inertia. Mechanical stiffness requires a force that is proportional to displacement and that required for an inertial load is required to create acceleration. The energy associated with both of these effects may be stored and will influence the dynamic performance of the system. Frictional forces affect both the dynamic and steady-state response of the system. The force required to overcome friction is usually expressed as a function of velocity and the energy used is converted to heat and lost to the environment. The forms of friction are usually classified as: Stiction or static friction required to initiate movement Coulomb friction proportional to the load force, independent of speed Viscous friction proportional to speed, independent of the load force Windage proportional to speed squared (sometimes higher) In many applications coulomb and viscous friction predominate. It is convenient to plot the load characteristics in terms of speed and force (or torque) which will provide a means for matching them with those of the hydraulic system where flow is related to speed and pressure related to force. Speed Coulomb Viscous Force 2 Valve characteristics Orifices are the principal control devices in fluid power systems. Usually they take the form of a circular hole or, as in the case of hydraulic control valves, an annular ring formed between a spool valve and the valve body. P J Chapple April 2006. Valve Controlled Systems 1 TEP4195 TURBOMACHINERY 2 Orifice flow Figure 1 - Sharp edged orifice. From elementary dynamic considerations, it can be shown for an incompressible fluid that the fluid velocity through the vena contracta, Figure 1 may be found using the following relationship: u= 2 g h = 2 ( P1 - P 2 ) (1) where u = Fluid velocity m s-1 g = Gravimetric constant m s-2 h = Head across orifice m P1 = Up stream pressure N m-2 P2 = Vena contracta pressure N m-2 P3 = Down stream pressure N m-2 = Fluid density kg m-3 (870 for hydraulic oil) 3 Velocity The local maximum velocity in an ideal case can be expressed in terms of the pressure drop. For example, if an orifice has a 100 bar differential pressure and the fluid density is 870 kg m -3, then: u= 2 P = 2 x 100x 10 5 870 (2) u = 152 m s -1 4 Discharge Coefficient A flow, Q, through an orifice can be related to the area and the velocity. Generally: Q = u Ao (3) where Ao = orifice area m2 Equations (1) and (3) can be combined to obtain a relationship between the flow rate and the differential pressure across the orifice. The area at the vena contracta is reduced in relation to Ao, and a discharge coefficient Cd is included giving: P J Chapple April 2006. Valve Controlled Systems 2 TEP4195 TURBOMACHINERY Q C d Ao 2( P1 P 2 ) (4) For high flow rates indicated by a high Reynolds Number, the discharge coefficient for a sharp edged orifice has been shown to be 0.62. For other shapes, guiding the flow path more effectively, higher values can be obtained. For example, a Cd of 0.98 is possible for a nozzle. The orifice equation (4) is obtained by making the following assumptions: I. The velocity upstream of the orifice is very much less than the velocity in the vena contracta. II. The downstream pressure is measured at the vena contracta. 5 Flow Coefficients In the practical case of a control orifice the conditions at the vena contracta are not easily measured. It is usual to relate the flow through the orifice to the pressure drop from inlet to outlet. In this case we can use a similar law with a flow coefficient Cq instead of the discharge coefficient. Q C q Ao 2( P1 P 3 ) Note that if the orifice area is very much less than the upstream area and the pressure P3 is the same as that at the vena contracta, then: Cq Cd 6 Variation in Flow Coefficient The orifice flow coefficients change with the nature of the flow through the orifice (Reynolds Number Re effect). A convenient type of Reynolds Number, to use is often termed the flow number, []. 2( P1 P 3 ) Dh For most sections: Dh where = Flow Number Dh = Hydraulic diameter = Kinematic viscosity 4 x flow section area flow section perimeter m m2 s-1 The relationship between the flow coefficient and the flow number can be seen in Figure 2 P J Chapple April 2006. Valve Controlled Systems 3 TEP4195 TURBOMACHINERY Figure 2 - Relationship between the flow coefficient and the flow number. When the coefficient reaches a steady value at high , then the flow equation can be considered a good representation of the actual situation. Where is varying, the equation is not such an accurate description. Indeed at low flow numbers the flow in fact becomes directly proportional to the pressure drop across the orifice. At intermediate flows, the situation cannot be easily described mathematically. 7 Pressure Recovery Downstream of the Vena Contracta Considering the expansion downstream of the vena contracta as a sudden enlargement shows the theoretical reason for the pressure recovery. Figure 3 - Pressure characteristics through a sharp edge orifice. By considering the momentum force at 3, assuming that the pressure at the vena contracta, P2 is constant across the pipe diameter: P J Chapple April 2006. Valve Controlled Systems 4 TEP4195 TURBOMACHINERY Force Qu ( P 3 P 2 )A3 = 1A3u 3( u 2 u 3 ) ( P 3 P 2 ) 1u 3( u 2 u 3 ) The pressure P3 is determined by the resistance or load in the system down stream of the orifice. If this pressure is very low, it follows that the pressure at the vena contracta will be very low. In some cases it will be so low that air is released from the oil (saturation pressure). Below this at the vapour pressure air and vapour will be released into the fluid causing cavitation damage to occur. In addition to cavitation, the vapour bubbles will condense when the fluid enters a higher pressure region and the air will remain as bubbles. Whilst some of these will be released to the atmosphere in the reservoir, many will remain within the system. This may cause a spongy system operation and in extreme cases reduce the pump discharge. 8 Control Valve Characteristics Using the orifice equation the valve flow is given: Q CQ A 2 pV Thus the flow variation through a valve, for a given opening area, varies as the square root of pv , the magnitude of which will be limited by the supply pressure, Ps. In practice, the system designer is more concerned with the pressure difference, Pm, that is available across the actuator or motor and, consequently, it is more convenient to relate the flow to the actuator load pressure difference. The supply pressure, PS, is assumed to be constant. Supply P port ISO symbol Return T port A port B port Return T port Figure 4 Spool Type Control Valve For the spool type valve of Figure 4, movement of the spool in the direction shown will connect the B port to the outlet and the A port to the return line to the reservoir, or tank. This type of valve has three positions and is used as a directional control valve DCV. Various configurations are available for the P J Chapple April 2006. Valve Controlled Systems 5 TEP4195 TURBOMACHINERY centre position, which are discussed later. For partial openings of the valve there will be a restriction in the flow created by the lands of the valve as shown in Figure 5. Note that the area of the orifice or restriction is: Area dx Figure 5 Orifice Restriction in Spool Valves In spool valves, there is a peripheral flow of fluid through the annulus formed by the valve land and the port as shown in Figure 5. High Pressure PS Figure 6 Spool valve The flow from the high pressure inlet to the spool valve in Figure 6 creates a high velocity in the outlet metering annulus so that there is a resulting force on the spool tending to close the valve. This arises from the difference between the pressure force on the spool land on the left side, which is due to the inlet pressure, PS, and that on the right hand spool land, which is less because the pressure is reducing radially outwards due to the increasing fluid velocity. This pressure force is equal to the axial component of the momentum change so for a velocity U, the momentum force is given by: QU cos The flow angle depends on the valve opening and the clearance between the spool and the valve bore but it is often given the value of 690 attributed to the original work by Von Mises. Four way valves can be used to control the velocity of actuators by introducing both meter-in and meter-out restrictions into the flow path as shown in Figure 7. The valve position is fully variable and can be controlled by: Direct lever manual input. Hydraulic pilot operated from an input lever or joystick. Proportional solenoid P J Chapple April 2006. Valve Controlled Systems 6 TEP4195 TURBOMACHINERY A2 Velocity UE A1 Force F Q1 P1 Q2 P2 A B P T = A1 /A2 PS Figure 7 Four Way Valve Velocity Control For proper design of the circuit and appropriate component selection it is necessary to analyse the system in order to determine the actuator pressures as a function of the actuator load force. In this system the pressure drop across each valve land needs to be considered as a function of the flow and the valve position or opening. 9 Analysis of the valve/actuator system 9.1 Actuator extending Valve flow characteristics For the parameters shown in Figure 6 the valve flows are given by: Q1 = K1 x K 1 = R1 P s - P1 2 where R1 = effective metering shape parameter (e.g. CQ d for annular ports). For zero pressure in the return line: Q2 = K 2 x K 2 R2 P2 2 where R2 = effective metering area P J Chapple April 2006. Valve Controlled Systems 7 TEP4195 TURBOMACHINERY P1 Also, UE Q Q 1 2 A1 A2 P1=PS These equations give: P s - P1 = ( Relationship between the pressures for the valve connected to the unequal area actuator A1 K 2 2 2 ) P2 ( ) P2 A2 K1 RS For a valve spool that has symmetrical metering, RS= 1 Then PS P1 2 P2 (1) 2 PS8/Valve Figure Pressures during Extension Equation 1 relates the pressures P1 and P2 for the valve connected to the unequal area actuator as represented Figure 8. The flow from the annulus is lower than that to the piston because of its smaller area which results in a lower pressure drop in the valve. Actuator force P1 A1 P2 A2 F P1 = P2 F (2) A1 P1 P1=PS PS - P1 F/A1 A PS /2 Pressure relationship for a given force F on the actuator P2 Figure 9 Interaction between the flow and the force characteristics during extension Equation 2 relates the actuator pressures for a given actuator force with a positive force that acts in the opposing direction to the extending movement of the actuator. This relationship is shown on Figure 9 and the pressures for the valve controlling the actuator are determined by the intersection of the lines for the actuator and the valve at point A. The values of these pressures can be obtained from equations 1 and 2 for the valve and actuator. The force acting on the actuator can be in either direction. Using a force ratio defined by: P J Chapple April 2006. Valve Controlled Systems 8 P2 TEP4195 TURBOMACHINERY R= F P s A1 we get: and 3 P1 ( 1 + R ) = Ps ( 1+ 3 ) (3) P2 ( 1 - R ) = 3 Ps ( 1 + ) (4) Variations of the force will change the position of the line on Figure 9 that represents the actuator and, hence, change the position of the point of intersection, A, that will change the pressure levels according to Equations 3 and 4. For a value of R = 1, the force will be the maximum available and is the stall force for the system. For a given application the actuator area is chosen to provide the desired stall force at the chosen supply pressure. This will then determine the actuator pressures that are obtained for any other value of the force. 9.2 Actuator retracting For retraction of the actuator the valve position is reversed, the annulus now being connected to the supply and the piston to the return line. Following the same method for a symmetrical valve (K1 = K2 ) as for the actuator extension we get: P1 Q2 K1 x ( PS P2 ) and P1=PS Q1 K 1 x P1 B and as Q1 Q2 Then P2 PS F/A1 P1 2 A Extend Retract (5) PS /2 P2 PS Figure 10 Actuator retracting This relationship between P1 and P2 for the retracting actuator is shown in Figure 10 where point B is the operating condition for retraction of the actuator. It can be seen that when the valve is reversed there is a pressure change between points A and B. The equations for the pressures for actuator retraction are: 3 P2 - R = 1+ 3 Ps P J Chapple April 2006. (5) Valve Controlled Systems 9 TEP4195 TURBOMACHINERY P1 2 ( 1 + R ) = ( 1+ 3 ) Ps (6) The actuator velocity is determined from the flow equation for the valve using the appropriate values for the pressures P1 and P2. The selection of a valve having the necessary capacity is determined from the maximum required velocity condition. It should be noted that neither of the pressures can be less than zero so, for example, during extension, the maximum value of the force ratio, R, that is permissible in order to avoid cavitation of the flow to the piston is given by: P1 1 R 3 0 PS 13 1 R 3 to prevent cavitation For which condition: P2 PS P2 9.3 (1 1 3 (1 3 ) ) PS 2 Valve sizing The valve size needs to be selected such as to provide the flow required for the specified velocity and force conditions. In general, it is desirable to operate the system close to its condition of maximum efficiency, which can be obtained by considering the power transfer process. For simplicity consider an equal area actuator for which the power transmitted to the load is given by; Power, E = Pm Qm E = ( P s max - PV ) Q m Here, PV is the valve pressure drop which, from the orifice equation, can be expressed as: Qm = C q A 2 Pv 2 Pv = Q = k Q2m 2 C 2q A2 m where A = the valve orifice area. Hence: E = ( P s max - k Q2m ) Qm P J Chapple April 2006. Valve Controlled Systems 10 TEP4195 TURBOMACHINERY For maximum power at the load: dE 2 0 PS max 3Qm k dQ m 2 and kQm PV PS Pm giving Pm 2 PS max 3 Based on this analysis an approximation is often applied from the maximum power condition to give the best combination of valve and actuator sizes for a given supply pressure such that the thrust at maximum power is equal to two-thirds the stall force. The actuator size and the supply pressure can be selected to provide this stall thrust and the valve Q size is then determined on the basis of the maximum required value of . PV Valves are rated by determining the flow at a total fixed pressure drop across both ports and for a given valve position. Thus the flow at any other pressure drop is given by: Q QR P PR Where QR = rated flow and PR = rated pressure drop. PR is sometimes given as the pressure drop through only one of the metering lands. 9.4 Valves with non-symmetrical metering The use of valves in which the metering is non-symmetrical, normally by machining metering notches of different shapes, provides two major advantages over symmetrical valves which are: The possibility to increase the maximum negative, or overrunning force during extension (meter - out control) The avoidance of the pressure change during reversal of the valve as seen from Figure 11 the valve characteristic is a single line for both directions of movement. P1 P1=PS non - symmetrical valve retract and extend B F/A1 A Extend Retract P2 PS /RA2 PS Figure 11 Non-symmetrical valve metering P J Chapple April 2006. Valve Controlled Systems 11 TEP4195 TURBOMACHINERY The dotted line on Figure 11 shows the characteristics where the valve metering ratio, R S, has the same value as the actuator area ratio, . Figure 12 shows the output velocity U plotted against the force ratio R in comparison with the particular case of an equal area ratio actuator for which =1. The equal area actuator has a symmetrical characteristic and is often used in servo systems for this reason. The dotted line shows the effect of asymmetrical metering where the valve-metering ratio is the same as the area ratio of the actuator. -1.0 -0.6 Force Ratio R 0 0.6 =2 =1 1.0 1.4 Non-symmetrical valve = 2, RS = 2 1.0 0.8 0 Velocity ratio VR 0.4 -0.6 R -1.2 F PS AP VR velocity velocity for equal areaactuator -1.6 Figure 12 Load locus of velocity ratio against force ratio This type of valve is used extensively for the operation of linear actuators in mobile systems but its major disadvantages are: The sensitivity of the velocity to changes in the load force demonstrated in Figure 12 where variations in the load force have resulted in variations in the valve flow. The control is effected by creating a pressure loss in the valve that leads to inefficiency of operation and heat generation in the fluid which, in some circumstances, has to be removed by a cooler. However, this type of control is simple, employs relative few moving parts and provides ease of control by the operator. An example of this type of system is that used for positioning the mobile P J Chapple April 2006. Valve Controlled Systems 12 TEP4195 TURBOMACHINERY crane jib the velocity of which responds quickly to the valve position selected by the crane operator. When the valve is put to the centre position its ports are blocked and the fluid between the valve and the actuator is trapped thus locking the actuator into its set position. Alternative valve control methods to reduce the power loss are discussed later. A single pump can supply several valves where, in simple systems the pressure of a fixed displacement pump can be controlled by a relief valve. This system will increase the total power loss and bypass valves and/or variable displacement pumps with pressure compensation and load sensing are used to improve the overall efficiency. These methods are discussed in later sections. This method of valve control can also be used to control the speed of hydraulic motors but, wherever possible, because of the continuous power loss in the valve it is preferable to connect the motor directly to the pump as a hydrostatic transmission. 9 Typical Control Valves The position of spool type valves can be controlled manually as shown in Figure 13 using a direct acting lever for its operation. Figure 13 Manually Operated DCV Figure 14 DC Solenoid Operated Proportional Valve P J Chapple April 2006. Valve Controlled Systems 13 TEP4195 TURBOMACHINERY Valve position is often controlled using electrical solenoids for either AC or DC supplies. Proportional valves use a DC voltage input (usually 10V) to provide a continuously variable valve position, an example of this type of valve is shown in Figure 14. 10 Load Holding Valves The radial clearance between the valve and its housing is carefully controlled in the manufacturing process to levels of around 2 micron. The leakage through this space, even at high pressures, is small but for applications where it is essential that the actuator remains in the selected position for long periods of time (e.g. crane jibs where any movement would be unacceptable) valves having metal-to-metal contact have to be used. Figure 15 Pilot operated Check Valve Check valves such as that in Figure 15 usually employ metal-to-metal contact but they are only open in one direction under the action of the flow into the valve. For their use in actuator circuits it is necessary that they are open in both directions as required by the DCV. This function can be obtained from a Pilot Operated Check Valve that uses a control pressure to open the valve against reverse flow Figure 8 shows a typical pilot operated check valve (POCV) whereby a pilot pressure is applied onto the piston to force open the ball check valve to allow flow to pass from port 1 to port 2 when the check valve would normally be closed. The ratio of the piston and valve seat areas has to be chosen so that the available pilot pressure can provide sufficient force to open the valve against the pressure on port 1. P J Chapple April 2006. Valve Controlled Systems 14 TEP4195 TURBOMACHINERY Figure 16 Actuator Circuit using a POCV The use of a POCV is shown in Figure 16 where the external force on the actuator is acting in the extend direction. With the DCV in the centre position the check valve will be closed because the pilot is connected to the tank return line, which is at low pressure. Opening the DCV so as to extend the actuator the piston side pressure, now connected to the supply, will increase. When this pressure reaches the level at which the check valve is opened against the pressure generated on the rod side of the actuator by the load force, the actuator will extend. The POCV acts as a restrictor and opens just sufficiently to allow the annulus flow to pass through at a pressure that just resists the force on the actuator. P J Chapple April 2006. Valve Controlled Systems 15