SI_Noise_Resubmission_V1
advertisement

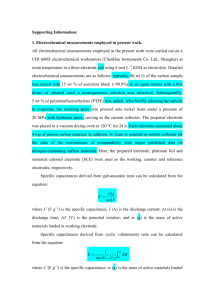
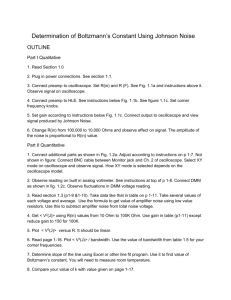
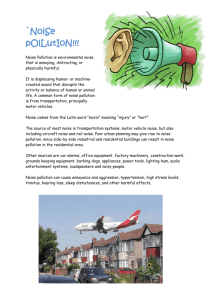
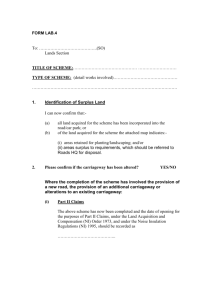
Signal-to-Noise Ratio improves in Critical-Point Flexure Biosensors due to Intrinsic Low Pass Filtering S1: Time Domain Simulation Framework for Force Noise The time domain response of Flexure sensor in presence of white thermo-mechanical force noise is modeled using Newton’s equation, given by𝑚 𝑑𝑣 𝜖0 𝑊𝐿𝑉𝐴2 + 𝑏𝑣 = 𝑘(𝑦0 − 𝑦) − + 𝐹𝑁 (𝑡), 𝑑𝑡 2𝑦 2 (𝑆1𝑎) 𝑑𝑦 = 𝑣. 𝑑𝑡 (𝑆1𝑏) Here, 𝑚 is the mass of movable electrode, 𝑣 is the velocity, 𝑡 is time, 𝑏 = 𝑚𝜔0 /𝑄 is the damping coefficient. 𝐹𝑁 (𝑡) is the random noise force with autocorrelation function ⟨𝐹𝑁 (𝑡)𝐹𝑁 (𝑡 ′ )⟩ = 2𝑘𝐵 𝑇𝑏𝛿(𝑡 − 𝑡 ′ ) and one sided power spectral density 𝑆𝐹 (𝜔) = 4𝑘𝐵 𝑇𝑏. It is also important to note that, the white Gaussian noise force is 𝐹𝑁 (𝑡) = √2𝑘𝐵 𝑇𝑏 𝑑𝑣 Using the definition 𝑑𝑡 = (1 + 𝑣(𝑡+Δ𝑡)−𝑣(𝑡) Δ𝑡 and 𝑑𝑦 𝑑𝑡 = 𝑑𝑊(𝑡) , 𝑑𝑡 where 𝑊(𝑡) is the Brownian process. 𝑦(𝑡+Δ𝑡)−𝑦(𝑡) , Δ𝑡 Eq. S1 can be written as follows- 𝑏Δ𝑡 𝑘Δ𝑡 𝜖0 𝑊𝐿𝑉𝐴2 Δ𝑡 𝑑𝑊𝛥𝑡 (𝑡) ) 𝑣(𝑡 + Δ𝑡) = 𝑣(𝑡) + (𝑦0 − 𝑦(𝑡)) − + √2𝑘𝐵 𝑇𝑏 , 2 𝑚 𝑚 2𝑚𝑦 𝑚 𝑦(𝑡 + Δ𝑡) = 𝑦(𝑡) + 𝑣(𝑡 + Δ𝑡)Δ𝑡, (𝑆2𝑎) (𝑆2𝑏) where 𝑣(𝑡) and 𝑣(𝑡 + Δ𝑡) are the values of velocity, at time 𝑡 and 𝑡 + Δ𝑡, respectively. Similarly, 𝑦(𝑡) and 𝑦(𝑡 + Δ𝑡) are the values of electrode positions, at time 𝑡 and 𝑡 + Δ𝑡, respectively; here, Δ𝑡 is the time step. Most importantly, 𝑑𝑊Δ𝑡 (𝑡) is a random variable that is normal distributed with mean zero and standard deviation √Δ𝑡. Knowing the initial condition i.e., 𝑦(0) and 𝑣(0), Eq. S2 can be solved for any 𝑉𝐴 . At every instant 𝑡, a new random variable 𝑑𝑊Δ𝑡 (𝑡) is generated to evaluate Eq. S2. S2: Time Domain Simulation Framework for Stiffness Noise The time domain response of Flexure sensor in presence of white stiffness noise is also modeled using Newton’s equation, given by𝑚 𝑑𝑣 𝜖0 𝑊𝐿𝑉𝐴2 + 𝑏𝑣 = (𝑘 + Δ𝑘𝑁 (𝑡))(𝑦0 − 𝑦) − , 𝑑𝑡 2𝑦 2 𝑑𝑦 = 𝑣, 𝑑𝑡 (𝑆3𝑎) (𝑆3𝑏) where Δ𝑘𝑁 (𝑡) is the random noise due to stiffness fluctuations with autocorrelation ⟨Δ𝑘𝑁 (𝑡)Δ𝑘𝑁 (𝑡′)⟩ = 0.5𝑁𝑘 (𝑡 − 𝑡 ′ ) and one sided power spectral density 𝑆𝑘 (𝜔) = 𝑁𝑘 . It is also important to note that white stiffness fluctuations are Δ𝑘𝑁 (𝑡) = √0.5𝑁𝑘 𝑑𝑊(𝑡) . 𝑑𝑡 For numerical simulations, Eq. S3 can be written as follows(1 + 𝑏Δ𝑡 𝑘Δ𝑡 𝜖0 𝑊𝐿𝑉𝐴2 Δ𝑡 √0.5𝑁Δ𝑘 (𝑦0 − 𝑦(𝑡))𝑑𝑊𝛥𝑡 (𝑡) ) 𝑣(𝑡 + Δ𝑡) = 𝑣(𝑡) + + , (𝑦0 − 𝑦(𝑡)) − 𝑚 𝑚 2𝑚𝑦 2 𝑚 (𝑆4𝑎) 𝑦(𝑡 + Δ𝑡) = 𝑦(𝑡) + 𝑣(𝑡 + Δ𝑡)Δ𝑡. (𝑆4𝑏) Equation S4 can be now solved for any 𝑉𝐴 to evaluate the noise response due to stiffness fluctuations. S3: Numerical Simulations Figures S1-S2 show the results of time domain stochastic simulations (see Table S1 for parameters used) for thermo-mechanical noise and stiffness noise due to temperature fluctuations, respectively. For the two cases, Eqs. S2 & S4 have been solved, respectively. We simulated the noise response at different voltages. For the specific voltage of 𝑉𝐴 = 0.9𝑉𝑃𝐼 , the results are summarized in Figs. S1a-d and Figs. S2a-d. Figures S1a-b show the fluctuations in the position of electrode on the potential energy landscape. Each symbol denotes the total energy during fluctuations. As expected, electrode does random thermal vibration around its equilibrium position, as shown in Fig. S1c. Figure S1d shows the corresponding sample average of root mean square fluctuations i.e., 2 1 𝑖=𝑁 𝑖 Δ𝑦𝑁 (𝑡) = √𝑁 ∑𝑖=1 𝑠(𝑦𝑖 (𝑡) − 𝑦𝑚𝑒𝑎𝑛 (𝑡)) . 𝑠 𝑖 (𝑡) = 𝑦𝑚𝑒𝑎𝑛 1 𝑁𝑠 𝑠 ∑𝑖=𝑁 𝑖=1 𝑦𝑖 (𝑡). 𝑖 Here, 𝑦𝑖 (𝑡) denote the position of electrode during 𝑖 𝑡ℎ simulation at time 𝑡 and 𝑦𝑚𝑒𝑎𝑛 (𝑡) is the corresponding mean position. 𝑁𝑠 (1000 in this article) is the number of simulations performed to calculate the statistical average. Interestingly, Δ 𝑦𝑁 (𝑡) starts from zero and then saturates to an equilibrium value (solid dot in Fig. S1d), which is nothing but the average noise power. Figure S1e compares the results obtained from time domain simulations (symbols) with the ones obtained from transfer function based analysis (solid line). In spite of the presence of the highly nonlinear electrostatic force, the results match because the fluctuations are small (Fig. S1d and Fig. S2d), thus justifying linearization around the equilibrium value (Eq. 2 and Eq. 3 in the main text) for transfer function based analysis. Having said that, as we go closer to the pull-in voltage, fluctuations increase considerably, eventually leading to noise initiated pull-in. Therefore, the linear transfer function based analysis is valid so long as we are below safe operating voltage. Note that, similar results and similar matching between time domain and transfer function analysis is achieved for stiffness noise as well (Fig. S2). Parameter Value 𝑊 1𝜇𝑚 𝐿 4𝜇𝑚 𝐻 40𝑛𝑚 𝐸 200𝐺𝑃𝑎 𝜈 0.31 𝜌 8912𝐾𝑔/𝑚3 𝑦0 100𝑛𝑚 𝑔 7.4 × 10−6 𝑊/𝐾 1 𝜕𝑘 𝑘 𝜕𝑇 10−3 /𝐾 𝜏𝑇 30𝑝𝑠 Table S1: Parameters used for calculation of SNR and LOD in the main text . Fig: S1: Time domain stochastic numerical simulations of thermo-mechanical noise. (a)-(b) Fluctuations of movable electrode position shown on the potential energy landscape. The region in the oval has been zoomed in Fig. S1b. Symbols denote the total energy (kinetic + potential) of the electrode. (c) Position of electrode as a function of time. 𝑦𝑠 denote the equilibrium position. (d) Root mean square fluctuations as a function of time. (e) Equilibrium value of root mean square fluctuations is the average noise power. Symbols denote the results from time domain numerical simulations; whereas solid line denote the calculations from linear transfer function based analysis (Eq. 5b in the main text). Fig: S2: Time domain stochastic numerical simulations of stiffness noise due to temperature fluctuations. (a)-(b) Fluctuations of movable electrode position shown on the potential energy landscape. The region in the oval has been zoomed in Fig. S2b. Dotted black curve corresponds to the maximum stiffness; whereas magenta dotted to minimum stiffness. Symbols denote the total energy (kinetic + potential) of the electrode. (c) Position of electrode as a function of time. 𝑦𝑠 denote the equilibrium position. (d) Root mean square fluctuations as a function of time. (e) Equilibrium value of root mean square fluctuations is the average noise power. Symbols denote the results from time domain numerical simulations; whereas solid line denote the calculations from linear transfer function based analysis (Eq. 6b in the main text). S4: Safe Operating Voltage to avoid Noise Initiated Pull-in In the main text, we argued that biasing close to pull-in improves 𝑆𝑁𝑅 and 𝐿𝑂𝐷. Here, we answer a very important and fundamental question regarding the stability of critical-point Flexure sensors close to pull-in point. The question is “how close to the pull-in point can one operate without making the sensor unstable?” Note that, in Figs. 3-4 in the main text, 𝑉𝐴 was swept from 𝑉𝐴 = 0 to 𝑉𝐴 = 0.995𝑉𝑃𝐼 . We should check if biasing at 𝑉𝐴 = 0.995𝑉𝑃𝐼 is feasible. To answer this question, we look at the behavior of movable electrode in response to both force and stiffness noise using time domain stochastic simulations. 1 Figure S3a shows the potential energy (𝑈 = 2 𝑘(𝑦0 − 𝑦)2 − 𝜖0 𝑊𝐿 2 𝑉𝐴 ) 2𝑦 landscape of Flexure sensor at 𝑉𝐴 = 0.995𝑉𝑃𝐼 . Movable electrode is stabilized at the minimum of 𝑈. In absence of noise, movable electrode should have remained at the bottom of potential energy well in Fig. S3a (see the dotted line in Fig. S3b also). However, thermo-mechanical noise exerts random force on the electrode making it fluctuate (reason for noise characterized by Δ𝑦𝑁 ) around its equilibrium position as shown in Figs. S3a-b. Symbols in Fig. S3a denote total energy (kinetic + potential) of movable electrode during fluctuations. Due to the presence of a high energy barrier Δ𝑈𝑏 = 𝑈(𝑦𝑢 ) − 𝑈(𝑦𝑠 ) ≈ 3.75 × 103 𝑘𝐵 𝑇, (𝑦𝑠 : stable equilibrium position and 𝑦𝑢 : unstable equilibrium position) the movable electrode only fluctuates around the bottom of potential well in Fig. S3a, but cannot surmount the energy barrier to make the system unstable. On the other hand, stiffness noise due to temperature fluctuations will make the potential energy landscape fluctuate as shown in Fig. S3c. Dotted black line corresponds to the potential energy profile for maximum stiffness; whereas dotted magenta for minimum stiffness. Due to the fluctuations in the stiffness, the position of the electrode fluctuates around its equilibrium position as shown in Figs. S3c-d. Once again, the stiffness fluctuations are not strong enough to make the electrode pull-in (Figs. S3c-d). Therefore, we will classify 𝑉𝐴 = 0.995𝑉𝑃𝐼 as the safe operating voltage. (a) (b) (c) (d) Fig. S3: Results of time domain stochastic simulations of a Flexure sensor at 𝑉𝐴 = 0.995𝑉𝑃𝐼 with Δ𝑈𝑏 ≈ 3.75 × 103 𝑘𝐵 𝑇, due to (a)-(b) thermo-mechanical noise and (c)-(d) temperature fluctuations stiffness noise. 𝑈𝑠 denote the potential energy at equilibrium position i.e., at the bottom of potential well. Symbols in Figs. S3a & c denote the total energy (kinetic + potential). Dotted black line in Fig. S3c correspond to maximum stiffness; whereas magenta line to minimum stiffness. Inset in Figs. S3a &c show the zoomed region around the bottom of potential well. Note that, if 𝑉𝐴 is increased further, Δ𝑈𝑏 decreases and becomes Δ𝑈𝑏 ≈ 5𝑘𝐵 𝑇 at 𝑉𝐴 = 0.99994𝑉𝑃𝐼 as shown in Fig. S4a. In this case, the movable electrode gets the sufficient energy from the surrounding to surmount the energy barrier and gets pulled-in as shown in Figs. S4a-b. Therefore, 𝑉𝐴 = 0.99994𝑉𝑃𝐼 cannot be classified as safe operating voltage. Interestingly, pull-in at 𝑉𝐴 = 0.99994𝑉𝑃𝐼 occurs due to thermomechanical noise, and not because of stiffness noise. However, if the voltage is increased even further, pullin can occur due to stiffness noise because of temperature fluctuations as shown in Figs. S4c-d. The bottom line from this section is that as we go closer and closer to pull-in point, chances of noise initiated pull-in increases. A safe operating voltage is that does not cause noise initiated pull-in or at least not in the time duration of measurement. (a) (b) (c) (d) maximum minimum Fig. S4: Noise initiated pull-in due to (a)-(b) thermo-mechanical noise at 𝑉𝐴 = 0.99994𝑉𝑃𝐼 with Δ𝑈𝑏 ≈ 5𝑘𝐵 𝑇 and (c)-(d) stiffness noise due to temperature fluctuations at 𝑉𝐴 = 0.999995𝑉𝑃𝐼 . 𝑦𝑠 corresponds to the stable equilibrium position; whereas 𝑦𝑢 unstable.