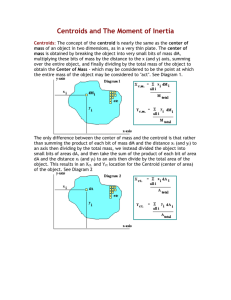
Where I is the moment of inertia about an arbitrary axis, is the
advertisement

9.161 9 Moments of Inertia (cross sections) In chapter 5 (distributed forces), we mostly dealt with distributed forces with constant intensity (like weight) or considered an equilibrium of forces resulting from a distributed force. From the equilibrium of forces we obtained the formulas for the centroids of the different bodies. In this chapter we will only consider 2D cases. In many cases of distributed forces, the force varies as a function of coordinate. For example, in pure bending of beams, the force varies lineary as a function of the location in the cross-section of the beam. Note that the force is zero at the x axis in the drawing, which is called the neutral axis. The force on the element of the area ΔA is ΔF=kyΔA, and the magnitude of the resultant R of the distributed force is: 𝑅 = ∫ 𝑘𝑦 𝑑𝐴 = 𝑘 ∫ 𝑦 𝑑𝐴 9.162 We used the second integral (which is called the first moment Qx) in order to obtain the location 𝑦̅ of the centroid of the cross section: 𝑦̅𝐴 = 𝑄𝑥 = ∫ 𝑦 𝑑𝐴 If we consider moments created by the force around the x axis we get ΔMx=yΔF=ky2ΔA, and the total moment: 𝑀𝑥 = ∫ 𝑘𝑦 2 𝑑𝐴 = 𝑘 ∫ 𝑦 2 𝑑𝐴 The last integral is known as the second moment or moment of inertia and is denoted Ix. In a similar fashion, a moment of inertia around the n a similar fashion, a moment of inertia around the y axis Iy can be obtained: 𝐼𝑥 = ∫ 𝑦 2 𝑑𝐴 𝐼𝑦 = ∫ 𝑥 2 𝑑𝐴 Note: since the distances from the axis are squared in the equations, the moments of inertia are always positive. Note: since 𝑟 2 = 𝑥 2 + 𝑦 2 𝐼𝑧 = 𝐽𝑂 = 𝐼𝑥 + 𝐼𝑦 9.163 Radius of gyration: If we replace the area of our body with a horizontal/vertical/circular strip with the same area and same moment of inertia around the axes and O, we get: 𝐼𝑥 = 𝑘𝑥2 𝐴 𝐼𝑦 = 𝑘𝑦2 𝐴 𝐽𝑂 = 𝑘𝑂2 𝐴 Distances 𝑘𝑥 , 𝑘𝑦 , 𝑘𝑂 are called radii of gyration. Example 1: 9.164 Calculating the Ix and Iy using the same elemental strips: We can use the formula from the above example (relative to the x) axis to calculate the Ix of the body in the drawing, using the vertical strip. In this case b=dx and h=y, to give us 𝑑𝐼𝑥 = 1 3 𝑦 𝑑𝑥 3 By integrating over x, we can get Ix. On the other hand 𝑑𝐼𝑦 = 𝑥 2 𝑑𝐴 = 𝑥 2 𝑦 𝑑𝑥 And, again, Iy can be obtained by integrating over x. Example 2: 9.165 Example 3: Example 4: 9.166 Moments of inertia of composite bodies: Parallel-axis theorem Above, the calculation of the moment of inertia needed a distance from an axis, and was specific to the axis specified. Let’s consider moment of inertia relative to the axis AA’: 𝐼𝐴𝐴′ = ∫ 𝑦 2 𝑑𝐴 Where y is the distance of the area element from the AA’ axis. If we draw axis BB’ through the centroid C of the area (it is called the centroidal axis), the distance to the same area element can be denoted y’. The relation between the two distances is y=y’+d where d is the distance of the centroid of the body from the original axis AA’. 𝐼𝐴𝐴′ = ∫ 𝑦 2 𝑑𝐴 = ∫(𝑦 ′ + 𝑑)2 𝑑𝐴 = ∫ 𝑦′2 𝑑𝐴 + 2𝑑 ∫ 𝑦 ′ 𝑑𝐴 + 𝑑2 ∫ 𝑑𝐴 The first integral is the moment of inertia relative to the centroidal axis. Because BB’ is the centroidal axis, the second integral must be zero. 𝐼 = 𝐼 ̅ + 𝐴𝑑2 Where I is the moment of inertia about an arbitrary axis, 𝐼 ̅ is the moment of inertia relative to the centroidal axis and d is the distance between the two axes. Composite bodies Similarly to consideration of centroids, bodies often can be considered as a combination of moments of inertia of common shapes calculated with respect to a single axis. 9.167 Moments of inertia for common bodies Note: while considering a composite body, different combination of bodies is possible. For simplification, try to choose a combination where shift in axis is not required. 9.168 Example: Vertical vs horizontal I-beam Example 1: 9.169 Example 2: Example 3: