LECTURE 1-Centroids and The Moment of Inertia
advertisement

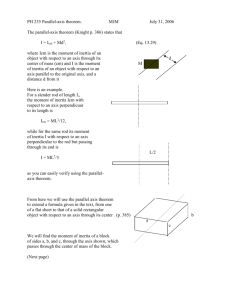
Centroids and The Moment of Inertia Centroids: The concept of the centroid is nearly the same as the center of mass of an object in two dimensions, as in a very thin plate. The center of mass is obtained by breaking the object into very small bits of mass dM, multiplying these bits of mass by the distance to the x (and y) axis, summing over the entire object, and finally dividing by the total mass of the object to obtain the Center of Mass - which may be considered to be the point at which the entire mass of the object may be considered to "act". See Diagram 1. The only difference between the center of mass and the centroid is that rather than summing the product of each bit of mass dM and the distance xi (and yi) to an axis then dividing by the total mass, we instead divided the object into small bits of areas dA, and then take the sum of the product of each bit of area dA and the distance xi (and yi) to an axis then divide by the total area of the object. This results in an Xct. and Yct location for the Centroid (center of area) of the object. See Diagram 2 Several points to mention. We will assume all our beams have uniform density and will not consider the case of non-uniform density beams. We will also point out that for any beam cross section (or object) which is symmetry, the centroid will simply be at the geometric center of the cross section. Thus for rectangular beam and I-beams, the centroid is located at the exact center of the beam. This is not the case for T-beams. Centroids of Composite Areas: Some objects or beams may be formed from several simple areas, such as rectangles, triangles, etc. (See Diagram 3) In this case the centroid of the compose area may be found by taking the sum of the produce of each simple area and the distance it's centroid is from the axis, divided by the sum of the areas. For the composite area shown in Diagram 3, the location of it's x centroid would be given by: X ct = (A1 * x1 + A2 * x2 + A3 * x3 + A4 * x4)/(A1 +A2 +A3 + A4) where x1, x2, x3, and x4 are the distances from the centroid of each simple area to the y-axis as shown in the Diagram 3. The location of the y - centroid would be given in like manner, although the y distances are not shown in Diagram 3: Y ct = (A1 * y1 + A2 * y2 + A3 * y3 + A4 * y4)/(A1 +A2 +A3 + A4) Moment of Inertia A second quantity which is of importance when considering beam stresses is the Moment of Inertia. Once again, the Moment of Inertia as used in Physics involves the mass of the object. The Moment of Inertia is obtained by breaking the object into very small bits of mass dM, multiplying these bits of mass by the square of the distance to the x (and y) axis and summing over the entire object. See Diagram 4. For use with beam stresses, rather than using the Moment of Inertia as discussed above, we will once again use an Area Moment of Inertia. This Area Moment of Inertia is obtained by breaking the object into very small bits of area dA, multiplying these bits of area by the square of the distance to the x (and y) axis and summing over the entire object. See Diagram 5. The actual value of the moment of inertia depends on the axis chosen to calculate the moment of the inertia with respect to. That is, for a rectangular object, the moment of inertia about an axis passing through the centroid of the rectangle is: I = 1/12 (base * depth3) with units of inches4., while the moment of inertia with respect to an axis through the base of the rectangle is: I = 1/3 (base * depth3) in4. See Diagram 6. Note that the moment of inertia of any object has its smallest value when calculated with respect to an axis passing through the centroid of the object. Parallel Axis Theorem: Moments of inertia about different axis may calculated using the Parallel Axis Theorem, which may be written: Ixx = Icc + Adc-x2 This says that the moment of inertia about any axis (Ixx) parallel to an axis through the centroid of the object is equal to the moment of inertia about the axis passing through the centroid (Icc) plus the product of the area of the object and the distance between the two parallel axis (Adc-x2). We lastly take a moment to define several other concepts related to the Moment of Inertia. Radius of Gyration: rxx = (Ixx/A)1/2 The radius of gyration is the distance from an axis which, if the entire area of the object were located at that distance, it would result in the same moment of inertia about the axis that the object has. Polar Moment of Inertia J = r2 dA The polar moment of inertia is the sum of the produce of each bit of area dA and the radial distance to an origin squared. In a case as shown in Diagram 7, the polar moment of inertia in related to the x & y moments of inertia by: J = Ixx + Iyy. One final comment - all the summations shown above become integrations as we let the dM's and dA's approach zero. And, while this is important and useful when calculating Centroids and Moments of Inertia, the summation method is just as useful for understanding the concepts involved