N14
advertisement

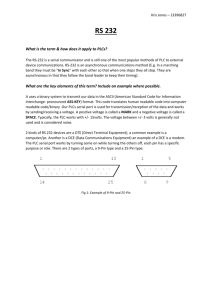
N14 Serial Protocols device level RS-232 RS-422 RS-485 USB CAN IEEE 1394 Firewire chip level (all chips on same board with common GND) SPI I2C Layers electrical layer 1) voltages a) logic high, logic low b) single ended, differential c) distance d) supply power to another device 2) read/write/tri-state 3) connectors 4) pinouts 5) collision arbitration byte layer 1) bits per byte, parity 2) lsb first, msb first 3) bit speed a) fixed baud (start bit, number of stop bits) b) clocked 4) character encoding (ASCII) packet layer 1) address a) receiver device b) sender device 2) number of bytes 3) checksum 4) collision arbitration page 1 of 11 N14 page 1 of 11 EIA RS-232 between DTE (data terminal equipment) and a DCE (data communication equipment = modem) originally current loop driven, later changed to voltage level driven UART (universal asynchronous receiver transmitter) software UART emulation hardware UART buffer size inverted logic logic HI = 1 = mark = -3V to -25V logic LO = 0 = space = +3V to +25V originally D25 connectors point-to-point connections use one receiver per transmitter no collision detection needed DTE = D9 male TD pin 3 RD pin 2 signal GND pin 5 DCE = D9 female TD pin 2 RD pin 3 signal GND pin 5 chassis GND pin 9 chassis GND pin 9 handshaking lines DCD (data carrier detect) into DTE pin 1 DTR (data terminal ready) from DTE pin 4 DSR (data set ready) into DTE pin 6 RTS (request to send) from DTE pin 7 CTS (clear to send) into DTE pin 8 most common is 8 data bits, no parity bit, 1 stop bit (8N1) = 10 bits / byte (1 start, 8 data, 1 stop) fixed baud rate (bits per second) = 300, 1200, 2400, 4800, 9600, 14400, 19200 can now use 28.8 K, 38.4 K, 57.6 K, 115.2 K old teletypes = 110 baud (2 stop bits) N14 page 1 of 11 hold line at logic HI drop line to logic LO for start bit with duration (1/baud) seconds transmit data bits at fixed rate with lsb first and msb last transmit parity bit if needed hold line at logic HI for stop bit(s) space +12V start b0 b1 b2 b3 b4 b5 b6 b7 stop mark -12V RS-232 ASCII cap K= hex 4B= 0100 1011 +12V space start 1 1 0 1 0 0 1 0 stop -12V mark TTL level ASCII cap K = hex 4B = 0100 1011 +5V mark start 1 1 0 1 0 0 1 0 stop 0V space usually use prearranged baud rate between devices can have auto baud recognition be careful of data over-run if UART does not have a buffer or CPU cannot keep up may need to flush UART buffer to get most recent information hex 4B = cap K N14 page 1 of 11 50 feet maximum only one receiver per transmitter does not explicitly provide power to DCE (some “port powered” devices parasite from RTS) requires TTL/CMOS logic to RS-232 level drivers - MAX232 chip http://www.beyondlogic.org/serial/serial1.htm#40 no standard packet protocol legacy COM port on PC N14 page 1 of 11 EIA RS-422 similar to RS-232 each signal uses a differential voltage between two wires rather than single ended voltages relative to GND Tx is two wire twisted pair, Rx is two wire twisted pair ±6 V multi-drop with up to 10 receivers per transmitter one master, 10 slaves not all slaves can talk back to master unless they have tri-state outputs better noise immunity higher speed up to 100K baud longer distance up to 4000 feet typically used to boost RS-232 over longer lines N14 RS-485 similar to RS-422 but only one twisted pair true multi-point bus up to 32 drivers and 32 receivers on one twisted pair of wires up to 4000 feet requires tri-state Tx drivers requires device addresses requires bus arbitration – usually software master-slave device defaults to receiver mode listens for end of current byte being sent on twisted pair can sense bus collision by current draw recommend bus terminating resistors Rt = 120 requires TTL/CMOS logic to differential drivers - MAX485 chip 1 RO Receiver Output if VA > VB+200mV then RO=HI if enabled if VB > VA+200mV then RO=LO if enabled Receiver Output Enable if /RE=LO then RO is enable if /RE=HI then RO=hiZ Driver Output Enable if DE=HI then driver outputs are enabled if DE=LO then driver outputs are hiZ Driver Input if DI=LO then VB > VA if enabled if DI=HI then VA > VB if enabled 2 /RE 3 DE 4 DI 5 6 7 8 GND A Noninverting I/O B Inverting I/O VCC Positive supply voltage 4.75 V < VCC < 5.25 V page 1 of 11 N14 page 1 of 11 USB (Universal Serial Bus) two wire differential multipoint bus four pins – twisted pair data D+ and D-, +5V, GND USB 1.1 up to 12 Mbps USB 2.0 up to 480 Mbps with 5 m cable USB 3.0 up to 4.8 Gbps CMOS voltage levels in full speed (FS) and low speed (LS) modes reduced voltage levels in high speed (HS) mode - low = 0V to 10mV, high = 360mV to 440mV uses non-return to zero inverted (NRZI) logic logic 0 transitions the voltage state (low to high, or high to low) logic 1 does not transition state up to 127 devices each with unique address master device arbitrates traffic flow on the bus significant protocol at packet level three types of packets - handshake, setup, data six styles of connectors for USB 1.1/2.0 – A, B, miniA, miniB, microAB, microB maximum unit load of 150mA per device on +5 power line maximum of 5 unit loads from bus master USB to serial driver = FTDI FT232 provides TTL level TX, RX, RTS, CTS requires USB drivers on PC that act like COM serial port http://www.usb.org/home N14 page 1 of 11 CAN (Controller Area Network) two wire differential multipoint bus requires CAN controller (similar to UART) and CAN transceivers (similar to MAX232) many microprocessor families now provide CAN support up to 1 Mbps at 40 m nominally uses 0 to 5V no standard connectors – often use D9 or RJ45 can provide power to slave devices requires bus terminating resistors Rt = 120 significant protocol requirements at packet layer includes collision arbitration numerous SAE and ISO standards msb first identifier = 11b address of destination control = 4b number of data bytes per packet (up to 8) data = 8b per byte CRC = 15b cyclic redundancy check N14 OBD-II IEEE 1394 Firewire multi-point bus up to 63 devices 1394b = 786 Mbps (now up to 3.2 Gbps) can supply power to peripheral devices can use direct memory access (DMA) used primarily for video cameras page 1 of 11 N14 page 1 of 11 SPI (Serial Peripheral Interface) four wire interface (plus GND) master device provides clock line TTL or CMOS voltage levels and speeds (up to 70 Mbps) SCK – serial clock (from master, shared by all chips) MOSI – master output, slave input (shared by all chips) MISO – master input, slave output (shared by all chips, slaves must have tri-state outputs) CS – chip select (separate line to each slave from master) typically data 8 bits with lsb first can be longer and/or msb first based on slave chip SPI send and receive subroutines in many programming languages N14 I2C two wire interface (plus GND) SCL – serial clock (bi-directional but typically provided by master) SDA – serial data (bi-directional) typically only master drives the clock each chip has a pre-assigned unique address up to seven bits long uses open-drain output drivers and pull-up resistors TTL or CMOS voltage levels and speeds (up to 1 Mbps) master issues a special start sequence and then sends the address of a specific chip typically 8 data bits with msb first (depends on slave chip) data is presented on SDA and then SCL is pulsed lower throughput than SPI but fewer wires does not require multiple CS lines from master like SPI I2C send and receive subroutines in many programming languages http://www.robot-electronics.co.uk/htm/using_the_i2c_bus.htm page 1 of 11