When doctor and algorithm are in complete agreement
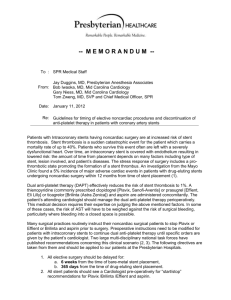
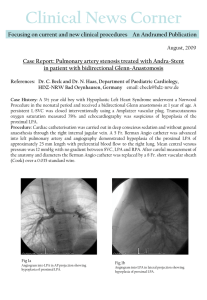
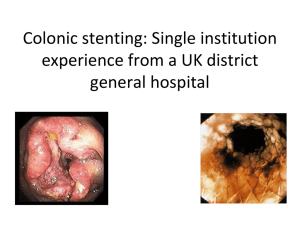
advertisement

1 Visualization and detection of stent fracture Pier Marco Ricchetti 1, 2, 3, Denys Emilio Campion Nicolosi 1, 4 , Aron José Pazin de Andrade 1, 3, 4, Antonio Massamitsu Kambara 4 a Dante Pazzanese Institute of Cardiology / USP University / Medicine School, São Paulo, Brazil b Fundação Educacional Inaciana – FEI, São Paulo, Brazil c São Judas University, São Paulo, Brazil d Dante Pazzanese Institute of Cardiology, São Paulo, Brazil E-mail: pier.ricchetti@gmail.com Abstract. Stents have been widely used as a treatment of cardiovascular diseases. However, studies have pointed out the occurrence of problems related to stent fractures. Fractures in stents is usually detected by visual analysis, that may be affected by the presence of noise and image deformations. The lack of researches to automate the stent fractures detection has motivated this work, in which techniques are developed to facilitate the diagnosis by observation (Image Delineation Algorithm) and, when possible, pointing out areas of possible fractures (Fracture Detection Algorithm). The use of classical elements and the development of additional computational techniques contributed to the process of image analysis, providing a possible way to aid medical diagnosis. The developed algorithms are applied to images samples from femoropopliteal arteries and the results are compared to those of medical diagnosis. As a result besides the improvement of image display, a Kappa concordance index of 0.878 for the detection of fractures confirms the method as satisfactory with quite relevant agreement. Keywords: stent fracture detection; image analysis; algorithm; stent image. 1. INTRODUCTION Stents are tubular metal structures in grid form and aim to prevent major reduction in the vessel angioplasties, avoiding the shedding of plate fragments in involved regions. The implant of stents in peripheral vascular region has been considered as a solution for endovascular treatment, and is widely used. However studies pointed out, with a certain frequency, the occurrence of problems related to stent fractures, that must be diagnosed and properly treated [8][10][6][11] . The computer image analysis plays a fundamental role in medical diagnosis of various occurrences, including the fractured stent. Currently, computed tomography can be considered one of the best techniques for acquisition of stent images [1][9][7] . However, this technique is relatively expensive so the conventional X-ray is used, and the noise and distortions that exist in most of these images make the analysis complex, as shown in the examples used in this paper. Although some image analysis systems have been deployed in medical field, no reference can be found on the specific case of fracture detection in stents. The analysis of fractures is currently done in an observational way, by the medical doctor. This paper presents algorithms that facilitate the task of analyzing stent fractures, while introducing an additional form of analysis that will provide better accuracy in medical diagnosis of stent fracture. 2 2. MATERIAL and METHODS For correct use and preparation of the algorithms, important factors must be considered: - images are generated by X-Ray devices; - images must be extracted from capture equipment, as DICOM (Digital Imaging and Communication in Medicine) files, which are widely used by medical imaging devices; - stent positioning in the image should be oriented vertically; - images should not have excessive noise, caused by the positioning of the stent in proximity to a bone, by accuracy of the device or even by noise from the capture system (developed algorithms have a certain tolerance to noise, as will be demonstrated); - it is desirable to select only the stent from the image, in order to have a better performance of the algorithm. In this work, we obtained images from stents placed in popliteal region, by reading DICOM files generated by conventional method of capture. These images were extracted, enhanced through the elimination of excessive noise (by using an image editor), and saved in bitmap format. 3. ALGORITHMS We developed two algorithms to aid the diagnosis of stent fractures. These algorithms are based on inspection of image points, without any computational learning technique. The first is the “Image Delineation Algorithm” (IDA), which allows us to highlight most relevant points of stent image, and acts in a different way when compared to an edge detection algorithm[2], as it considers variations in the intensity of neighborhood pixels and discards nonsignificant shadows, as explained below. For the same reason, the use of classic contrast enhancement techniques in a stent image is not desirable. The purpose of the IDA algorithm is to make a better picture for analysis. The other algorithm is the “Fracture Detection Algorithm” (FDA), to be applied in a previous treated image with IDA. The FDA was developed to detect fractures in stents. It detects discontinuities that do not represent the expected image behavior / pattern. Each of these algorithms is exposed in details below. 3.1. Image Delineation Algorithm (IDA) The IDA can be constructed as follows: Given a two-dimensional Cartesian space S and a image W, obtained through the conventional process of acquisition, where W S, we will consider each of W positional pairs represented by Pw(x,y). For each Pw(x,y) position, there will be a G value representing the tone of Pw(x,y). G thus represents the pixel value (in 8 bits gray scale, this value varies from 0 – black to 255 – white). It was agreed that the stent appears outlined by darker shades, as occurs in stent images. To obtain better accuracy of stent detection, it was decided to split the image into two halves (left and right). As the positioning of the stent is vertical (or near vertical), normally there is a greater similarity of tones in each half due to possible lateral vessels or body structures. The algorithm is 3 applied in two halves of the image with index variables in 1 and 2, corresponding to each one of the halves. The goal of the next steps is to calculate the average differences in pixel intensity. This average will be held for a variable amount of differences, which coverage is defined by a coverage index 𝛿. The module of the differences of G values in the n contiguous elements of each W row are then stored in two one-dimensional arrays, named 𝑉𝐿1𝑑 and 𝑉𝐿2 𝑑 , each of them representing one half of the considered row. This dual approach allows better accuracy dealing with images that have lateral shadows, as pointed before. The values are, therefore: 𝑉𝐿1𝑑𝑝 = | 𝐺𝑖 − 𝐺𝑖−1 |, 1 < 𝑖 ≤ 𝑛⁄2, 𝑝 = 𝑖 − 1 (1) 𝑉𝐿2𝑑𝑞 = | 𝐺𝑗 − 𝐺𝑗−1 |, 𝑛⁄2 < 𝑗 ≤ 𝑛, 𝑞 = 𝑗 − 𝑛⁄2 (2) We create then the one-dimensional array 𝑉𝑑𝑑1 that represents the array of the unique different decreasing values taken from 𝑉𝐿1 𝑑 , and the one-dimensional array 𝑉𝑑𝑑2 that represents the array of the unique different decreasing values taken from 𝑉𝐿2𝑑 . In the next step, we calculate the arithmetic average of each array (𝑉𝑑𝑑1 and 𝑉𝑑𝑑2 ) . The number of elements used to compute the average is defined by the coverage index 𝛿. Furthermore, this average will be used as a division point to decide when a pixel should be considered or discarded in the image. We assume as coverage index 𝛿, the percentage values to be considered in an 𝑉𝑑𝑑 array, starting at the first value. It´s the percentage of the greatest unique value from 𝑉𝑑𝑑 . In this case, 𝛿1 is the coverage index for the 𝑉𝑑𝑑1 array, and 𝛿2 is the coverage index for the 𝑉𝑑𝑑2 array. The 𝑚1 and 𝑚2 averages are computed as described below, where 𝛿1 and 𝛿2 values will specify the portion of the total number of elements in 𝑉𝑑𝑑1 (that is, 𝑛1 ) and the portion of the total number of elements in 𝑉𝑑𝑑2 (that is, 𝑛2 ): 𝑚1 = ∑𝑟𝑖=1 𝑉𝑑𝑑1 𝑖 𝑟 ∑𝑠𝑖=1 𝑉𝑑𝑑2 , where 𝑟 = 𝛿1 ∗ 𝑛1 100 𝛿 , (3) 2 𝑖 𝑚2 = , where 𝑠 = 100 ∗ 𝑛2 (4) 𝑠 The coverage index will define what portion of the values will be considered in the average calculus. The calculated values 𝑚1 and 𝑚2 will be the marks that will define which points will be considered as relevant during the image construction. Greater 𝛿 index leads to a greater number of points to be considered. Finally, a new image named Wb is constructed from the 𝑡 values in each half of the W image, assuming that all positive differences 𝐺𝑡𝑢𝑐 − 𝐺𝑡 (where 𝐺𝑡𝑢𝑐 is the previous occurrence of a relevant G value, and 𝐺𝑡 is the G value at the moment) that exceed the calculated value for the mean m (𝑚1 or 𝑚2 , depending on the half) will define the relevant points in the image construction. In this case, the 𝑃𝑤𝑏 (𝑥, 𝑦) value should be remapped with value for active point (that is 255). Other points are remapped with value 0 (or inactive point). Note that 𝑃𝑤𝑏 (𝑥, 𝑦) represents the point value at Wb image. When this algorithm is used as an input for the FDA, only the most significant point at left and at right needs to be detected in each half, so only the edges of the stent (including the center) are outlined. For this reason, we run through the W points in both directions, on each row. When the first detection of a difference greater than the m value occurs, the process stops and goes to the next row. In this case, the constructed image highlights only the external most relevant points in each half of the stent. 4 As an alternative (for viewing), in both cases, we can keep the original W pixels in Wb image, when not only the highlighted points are shown, but the entire image with the highlighted points outlined. In this case, we can create Wb as a total copy from W (not only the dimensions) and then keep the pixel values unchanged when not relevant points are detected. As examples, the IDA is applied to a normal stent image (Fig. 1) and to a fractured stent image (Fig. 2). The original images (Fig. 1a and Fig. 2a) are then submitted to the IDA, with different values of 𝛿 (as shown in the (b), (c) and (d) itens, in both images). Note that the details of detection increases with the value of 𝛿, but increasing 𝛿 can generate unwanted noise, as can be seen in Fig. 2d. (a) (b) (c) (d) Fig. 1. Using the IDA. (a) Original image. (b) IDA using 𝛿1 = 𝛿2 = 5. (c) IDA using 𝛿1 = 𝛿2 = 50. (d) IDA using 𝛿1 = 𝛿2 = 100. 5 (a) (b) (c) (d) Fig. 2. Using the IDA. (a) Original Image. (b) IDA using 𝛿1 = 𝛿2 = 5. (c) IDA using 𝛿1 = 𝛿2 = 50. (d) IDA using 𝛿1 = 𝛿2 = 100. 3.2. Fracture Detection Algorithm (FDA) The FDA is constructed as follows: Given a two-dimensional Cartesian space S and a Wb image, obtained from the IDA, where Wb S, we will consider each of Wb positional pairs as represented by 𝑃𝑤𝑏 (𝑥, 𝑦). For each 𝑃𝑤𝑏 (𝑥, 𝑦) position, there will be a G value representing the tone of 𝑃𝑤𝑏 (𝑥, 𝑦), with G representing the pixel value (in the generated image, this value is 0 – black or 255 – white). The following steps are then applied: We compute the distance in pixels between the outermost points of the stent (the extremes on the left and right sides, for each row – note that, as a result of the IDA, the row may have up to four points, two in each half). Therefore, it is estimated: o VGl , that is a vector of the x coordinate values of the first active 𝑃𝑤𝑏 (𝑥, 𝑦) point, obtained from a sequential search, from left to right, for each row; o VGr , that is a vector of the x coordinate values of the first active 𝑃𝑤𝑏 (𝑥, 𝑦) point, obtained from a sequential search, from right to left, for each row; o 𝑉𝐺𝑑𝑖𝑓 , that is the differences (distances) vector between 𝑉𝐺𝑟 and 𝑉𝐺𝑙 values, for each row, meaning that: 𝑉𝐺𝑑𝑖𝑓𝑖 = |𝑉𝐺𝑟𝑖 − 𝑉𝐺𝑙𝑖 | , 1 ≤ 𝑖 ≤ 𝑛 (5) (n is the number of lines in the image) In the next step, we produce an array containing the values of the difference vectors associated with the row where the difference occurs. The purpose of this array is to keep a memory location (i.e., the row) for further modifications; This two-dimensional array, called 𝑀𝐺𝑑𝑖𝑓 , will keep the 𝑉𝐺𝑑𝑖𝑓 value associated to the y value (position) for each 𝑃𝑤𝑏 (𝑥, 𝑦) point. For each 𝑉𝐺𝑑𝑖𝑓 row will be created a 𝑀𝐺𝑑𝑖𝑓 pair, 6 since 𝑀𝐺𝑑𝑖𝑓𝑖,1 = 𝑖 , and 𝑀𝐺𝑑𝑖𝑓𝑖,2 = 𝑉𝐺𝑑𝑖𝑓𝑖 , 1 ≤ 𝑖 ≤ 𝑛, when 𝑛 is the number of rows in the image; The 𝑀𝐺𝑑𝑖𝑓 array will therefore have two columns: the first will be the number of actual image row, and the second will be the calculated difference in 𝑉𝐺𝑑𝑖𝑓 . In the next step, we produce the two-dimensional array 𝑀𝐺𝑑𝑖𝑓𝑆 , with the same values of 𝑀𝐺𝑑𝑖𝑓 , but ordered in ascending order of the second dimension (the distance value). The purpose of this step is to obtain the smallest distance between pixels outside, which is a requirement for the next steps. First rows of 𝑀𝐺𝑑𝑖𝑓𝑆 array will define, therefore, the smallest distance values, so the rows where the stent is most narrow; We produce then the two-dimensional array 𝐴𝑣𝐷𝑖𝑓 , that will have the average values in consecutive positions of 𝑀𝐺𝑑𝑖𝑓 . To do so, we will assume that : 𝐴𝑣𝑑𝑖𝑓1,1 = 𝑀𝐺𝑑𝑖𝑓1,1 , (6) 𝐴𝑣𝑑𝑖𝑓1,2 = 𝑀𝐺𝑑𝑖𝑓1,2 , (7) 𝐴𝑣𝑑𝑖𝑓𝑖,1 = 𝑀𝐺𝑑𝑖𝑓𝑖,1 , 2 ≤ 𝑖 ≤ 𝑛 (8) 𝐴𝑣𝑑𝑖𝑓𝑖,2 = ̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅ 𝑀𝐺𝑑𝑖𝑓𝑖,2 , 𝑀𝐺𝑑𝑖𝑓𝑖−1,2 , 2 ≤ 𝑖 ≤ 𝑛. (9) The first column of 𝐴𝑣𝐷𝑖𝑓 array holds the image row value, and the second column holds the average between the actual and the previous average values stored in 𝑀𝐺𝑑𝑖𝑓 , (i.e., the average from 𝑀𝐺𝑑𝑖𝑓𝑖,2 and 𝑀𝐺𝑑𝑖𝑓𝑖−1,2 ) : a moving average calculus; The arrays 𝑀𝐺𝑑𝑖𝑓𝑆 (array of the smallest distances between potential boundaries of the stent) and 𝐴𝑣𝐷𝑖𝑓 (moving average array) obtained in the previous steps will have critical role in the detection of stent fracture. In the two following steps, we define “coverage index 𝛽”, which role is to define the coverage from the 𝑀𝐺𝑑𝑖𝑓𝑆 values, and the “critical percentage factor 𝛾” , which role is to define a cutoff value in fracture analysis. Increasing the coverage index 𝛽 will cause an increase in the number of rows from 𝑀𝐺𝑑𝑖𝑓𝑆 to be analyzed, so it increases the detection sensibility. Increasing the critical percentage factor 𝛾 will cause an increase in the critical value (or cutoff value) in fracture analysis. Both indexes can improve or complicate the detection process, as will be seen further. Definition and creation of the coverage index 𝛽: this index represents the percentage of 𝑀𝐺𝑑𝑖𝑓𝑆 values to be used when searching for possible fractures. This percentage allows to define the analysis scope in the smallest distances stored in 𝑀𝐺𝑑𝑖𝑓𝑆 (ascending order from 𝑀𝐺𝑑𝑖𝑓 ). The rows are selected from 𝑀𝐺𝑑𝑖𝑓 𝑆𝑖,1 , when 1 ≤ 𝑖 ≤ 𝑛𝐼𝑡𝑒𝑛𝑠 , where 𝑛𝐼𝑡𝑒𝑛𝑠 = 𝑛 ∗ 𝛽 . 100 It means that the first dimension of 𝑀𝐺𝑑𝑖𝑓 𝑆 corresponds to the original row number, and the second dimension of 𝑀𝐺𝑑𝑖𝑓 𝑆 helds the difference value (width of the stent). The coverage that will define which rows from 𝑀𝐺𝑑𝑖𝑓 𝑆 will be considered, from the first, is obtained from the coverage index 𝛽. Definition and creation of the critical percentage factor 𝛾: this percentage corresponds to the percentage of average calculated from the difference values, increased by 1 (an adjust for better detection, considering 1-pixel variation ), for the purpose of fracture detection. The calculated value for detection is the critical value 𝑐𝑉𝑎𝑙, demonstrated above with the possibility of fracture in one row that will be considered relevant: 𝛾 ̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅ 𝑐𝑉𝑎𝑙𝑘 = (𝐴𝑣 (10) 𝑑𝑖𝑓𝑘−1,2 , 𝐴𝑣𝑑𝑖𝑓𝑘+1,2 ) ∗ 100 + 1, 𝑘 = 𝑀𝐺𝑑𝑖𝑓𝑆𝑖,1 , 1 ≤ 𝑖 ≤ 𝑛𝐼𝑡𝑒𝑛𝑠 In the next step, for each Wb row taken from 𝑀𝐺𝑑𝑖𝑓𝑆 the possible occurrence of fracture will be verified. It will be considered as a possible fracture region, the regions around lines in which 7 ALL the following statements apply, for the right side of the stent (consider 𝑘 as the same as pointed in eq. 10): If the difference between 𝑉𝐺𝑟 values, considering the greater value between the actual row and the previous row and considering the lower value between the two next rows, is positive (it means that probably there is some abnormality in the border at the right side of the stent): max(𝑉𝐺𝑟𝑘 , 𝑉𝐺𝑟𝑘−1 ) − min(𝑉𝐺𝑟𝑘+1 , 𝑉𝐺𝑟𝑘+2 ) > 0 (11) If the difference between 𝑉𝐺𝑟 values in the previous row and in the actual row is above the critical value (it means that there is a sudden deformation): 𝑉𝐺𝑟𝑘−1 − 𝑉𝐺𝑟𝑘 > 𝑐𝑉𝑎𝑙𝑘 (12) If the difference between 𝑉𝐺𝑟 values in the previous row and in the next row is above the critical value (it means that there is a sudden deformation): 𝑉𝐺𝑟𝑘−1 − 𝑉𝐺𝑟𝑘+1 > 𝑐𝑉𝑎𝑙𝑘 (13) If the difference between 𝑉𝐺𝑟 values in the previous row and in the second next row is above the critical value (it means that there is a sudden deformation): 𝑉𝐺𝑟𝑘−1 − 𝑉𝐺𝑟𝑘+2 > 𝑐𝑉𝑎𝑙𝑘 (14) We should consider the possible regions at the left side of the stent too. Similarly at that one done to the right side, we apply that to the left side. It will be considered as a possible fracture region, the regions around rows in which ALL the following statements apply, for the left side of the stent (consider k as the same as pointed in eq. 10): If the difference between 𝑉𝐺𝑙 values, considering the greater value between the two next rows, and considering the lower value between the actual row and the previous row, is positive (it means that probably there is some abnormality in the border at the left side of the stent): 𝑚𝑎𝑥( 𝑉𝐺𝑙𝑘+1 , 𝑉𝐺𝑙𝑘+2 ) − 𝑚𝑖𝑛( 𝑉𝐺𝑙𝑘 , 𝑉𝐺𝑙𝑘−1 ) > 0 (15) If the difference between 𝑉𝐺𝑙 values in the previous row and in the actual row is above the critical value (it means that there is a sudden deformation): 𝑉𝐺𝑙𝑘 − 𝑉𝐺𝑙𝑘−1 > 𝑐𝑉𝑎𝑙𝑘 (16) If the difference between 𝑉𝐺𝑙 values in the previous row and in the next row is above the critical value (it means that there is a sudden deformation): 𝑉𝐺𝑙𝑘+1 − 𝑉𝐺𝑙𝑘−1 > 𝑐𝑉𝑎𝑙𝑘 (17) If the difference between 𝑉𝐺𝑙 values in the second next row and in the previous row is above the critical value (it means that there is a sudden deformation): 𝑉𝐺𝑙𝑘+2 − 𝑉𝐺𝑙𝑘−1 > 𝑐𝑉𝑎𝑙𝑘 (18) As an example, Fig. 3 shows the original image of a fractured stent (a), the image after the IDA, using 𝛿1 = 𝛿2 = 20 (b), the image after the FDA, using 𝛾 = 5 and 𝛽 = 5 (c), the image after the FDA, using 𝛾 = 5 and 𝛽 = 100 (d). The additional point of fracture that we see in (d) can really indicate a fracture, but increasing the 𝛽 value can generate false positives. It is important to point that the 𝛽 value is directly related to the number of the smallest width values to be considered in the search for fractures. 8 (a) (b) (c) (d) Fig. 3. Using FDA. (a) Original image. (b) IDA for 𝛿1 = 𝛿2 = 20. (c) FDA using 𝛾 = 5 and 𝛽 = 5. (d) FDA using 𝛾 = 5 and 𝛽 = 100. The critical factor 𝛾 is directly related to the value (average distances) of pixel positioning, above that (and satisfying the above exposed conditions) there will be probably a fracture in a chosen row (or/and its region). The example in Fig. 4 shows an image of a fractured stent after the IDA, using 𝛿1 = 𝛿2 = 20 (a), the image after the FDA, using 𝛽 = 100 and 𝛾 = 5 (b), the image after the FDA, using 𝛽 = 100 and 𝛾 = 100 (c). (a) (b) (c) Fig. 4. Using FDA. (a) Image after IDA, using 𝛿1 = 𝛿2 = 20. (b) FDA, using 𝛾 = 5 and 𝛽 = 100. (c) FDA, using 𝛾 = 100 and 𝛽 = 100. Note that in Fig. 4, IDA using 𝛿1 = 20 and 𝛿2 = 20 causes some additional lateral gaps (breakage in the lateral line of the stent), as we can see in (a). When 𝛾 = 5, there was detection of 9 changes in pixel positioning higher than 5% of the average pixel positioned (pixel boundaries), thus fracture occurrences were detected, as shown in (b). When 𝛾 = 100, however, only the higher variation was detected (the detected gap is deeper, although it is smaller at the border). In this case the real fracture was excluded by the algorithm, because this fracture is not deeper, as we can see in (c). As an example of the 𝛾 factor influence, we can see Fig. 2 again, when IDA has caused dispersive points in the image. The image generated by the IDA has submitted to FDA with different 𝛾 factors, and the results are shown in Fig. 5. In Fig. 5, we can see the original image as exposed in Fig. 2 (a), the image after the IDA, using 𝛿1 = 𝛿2 = 20 (b), and the results of FDA setting 𝛽 = 100, but using 𝛾 = 1 (c), 𝛾 = 4 (d), 𝛾 = 5 (𝑒), and finally 𝛾 = 50 (𝑓). In this example, there was difference in detection between 𝛾 = 1 (c) and 𝛾 = 4 (d), between 𝛾 = 4 (d) and 𝛾 = 5 (e), but was no difference in detection for 𝛾 = 5 (e) and 𝛾 = 50 (f). (a) (b) (c) (d) (e) (f) Fig. 5. Using FDA. (a) Original image. (b) IDA, using 𝛿1 = 𝛿2 = 20. (c) FDA, using 𝛾 = 1 and 𝛽 = 100. (d) FDA, using 𝛾 = 4 and 𝛽 = 100. (e) FDA, using 𝛾 = 5 and 𝛽 = 100. (f) FDA, using 𝛾 = 50 and 𝛽 = 100. 4. EXPERIMENTAL SETUP 10 4.1. Sample Size Calculation According to Flahault[4], for a diagnostic test with sensitivity (or specificity) of 80%, considering a lower limit of confidence interval of 0.55, a minimum sample size of 26 images of fractured stents and 26 images of non-fractured stents was necessary. After exclusion of the images considered unreadable by physicians (4 images), we used a sample of 70 images, 44 images of fractured stents and 26 of non-fractured stents. 4.2. Evaluation Method For the algorithm evaluation the Cohen´s kappa coefficient was used, that it is a statistical measure of agreement [3]. In this case, we consider the agreement between the expert (a physician specialized in analysis of stents) and the algorithm. 11 5. RESULTS AND DISCUSSION The IDA was applied for the 70 samples (as pointed in IV section, i.e., 44 fractured stent images and 26 non-fractured stent images), using δ_1=δ_2=20. The results are used as input for the FDA, using γ=5 and β=100. We chose these values by optimization of the results on some image test samples, and then we applied that for the 70 proposed samples. As a result, considering a specialist medical doctor as the gold standard, we obtained true positive in 42 cases and true negative in 24 cases (i.e. 2 false positives and 2 false negatives). For the results evaluation, we used the Cohen´s kappa coefficient of agreement (𝜅), an inter-annotator agreement for qualitative or categorical items, that includes the agreement that occurs by chance [3]. It was applied for a better analysis of the agreement between the algorithms and the gold standard. This method of calculation was performed as follows: 𝜅= 𝑃𝑎 −𝑃𝑒 (19) 1−𝑃𝑒 In Eq. 19, 𝑃𝑎 is the relative observed agreement among raters (doctor and algorithm) and 𝑃𝑒 is the hypothetical probability of chance agreement. When doctor and algorithm are in complete agreement, 𝜅 = 1, and if there is no other agreement between doctor and algorithm than what would be expected by chance, 𝜅 = 0. Fig. 6 shows the considered values used in Kappa calculation. Doctor (Standard) NonFractured Fractured Stent Stent Total Fractured Stent NonAlgorithms Fractured Results Stent 42 2 44 2 24 26 Total 44 26 Fig. 6. Values used in Kappa calculation. 70 We observed then that the relative agreement 𝑃𝑎 can be calculated as: (𝑇𝑟𝑢𝑒 𝑃𝑜𝑠𝑖𝑡𝑖𝑣𝑒 + 𝑇𝑟𝑢𝑒 𝑁𝑒𝑔𝑎𝑡𝑖𝑣𝑒) (42+24) 𝑃𝑎 = = = 0.943 (20) 𝑇𝑜𝑡𝑎𝑙 𝐶𝑎𝑠𝑒𝑠 70 To the probability of random agreement calculus, we can observe that - As a result of the application of the algorithms, there were 44 fractured stent results and 26 non-fractured stent results, so there was fractured stents in 62,9% of cases, and non-fractured stents in 37,1% of cases; - As a result of the gold standard (medical doctor specialized in stent fracture analysis), there was also 44 fractured stent results and 26 non-fractured stent results, so there was fractured stents in 62.9% of cases, and non-fractured stents in 37.1% of cases; - The probability for fractured results in both cases randomly is 0.629*0.629 = 0.396 (21) 12 - The probability for non-fractured results in both cases is 0.371*0.371 = 0.138 (22) Thus, the probability of random agreement, 𝑃𝑒 , is the result of the addition of (20) to (21): 𝑃𝑒 = 0.396 + 0.138 = 0.534 (23) Applying the (20) and (23) values to the Cohen´s Kappa formula (19): 𝜅= 𝑃𝑎 −𝑃𝑒 1−𝑃𝑒 = 0.943−0.534 1−0.534 = 0.878 (24) The 𝜅 calculation resulted in 0.878. As explained in Landis and Koch[5], the Table below shows the interpretation of Kappa values. Table Kappa interpretation Values of Interpretation Kappa <0 No agreement 0-0.19 Poor agreement 0.20-0.39 Fair agreement 0.40-0.59 Moderate agreement 0.60-0.79 Substantial agreement Almost perfect 0.80-1.00 agreement Source: Landis JR, Koch GG. The measurement of observer agreement for categorical data. Biometrics 1977;33:159-74. The agreement is considered satisfactory when Kappa index values are above 0.60. The calculated value pointed in (24), 0.878, therefore, is an almost perfect agreement, and despite the chosen specificity and confidence interval, it can still be considered a relevant diagnosis method. 6. CONCLUSION The result from the proposed method is satisfactory, as described in section 5. In the literature there are no methods to accomplish the task of stent fracture detection. This method is an aid, and could be improved, in the future, by the study of the results applying other values in the indexes/rates than that assumed here. Other improvement could be the application of this method in conjunction with traditional image filters, or the automatic positioning of the stent, so the input range could be greater (not only vertical positioning and low level noise images would produce good results). 6. ACKNOWLEDGEMENTS We would like to thank Dante Pazzanese Hospital and Institute of Cardiology, for their assistance in aspects related to the production of this work, especially PhD Marco Antônio Assis, for his great contribution, as well as Lee - Statistical and Epidemiology Laboratory of Dante Pazzanese hospital, for helping to define the evaluation method. 13 REFERENCES [1] Byeol, L. H. et al., 2008. Coronary stent fracture: detection with 64-section multidetector ct angiography in patients and in vitro. Radiology Magazine. Dec. 2008. vol. 249, n 3, pp. 810-881. [2] Canny, J. A.,1986. Computational approach to edge detection. IEEE Trans. Pattern Analysis and Machine Intelligence. vol. 8, pp. 679-714. [3] Cohen, J., 1960. A coefficient of agreement for nominal scales. Educational and Psychological Measurement. vol. 20, pp. 37–46. [4] Flahault, A. et al., 2005. Sample size calculation should be performed for design accuracy in diagnostic test studies. Journal of Clinical Epidemiology. vol.58, pp. 859–862. [5] Landis, J.R., Koch, G.G., 1977. The measurement of observer agreement for categorical data. Biometrics. vol. 33, pp. 159-74. [6] Nakazawa, G. et al.,2009. Incidence and predictors of drug-eluting stent fracture in human coronary artery - a pathologic analysis. J Am Coll Cardiol. vol. 54, pp.1924-1931. doi:10.1016/j.jacc.2009.05.075. [7] Pang, J. H. et al., 2009. Detection of stent fractures: a comparison of 64-slice ct, conventional cineangiography, and intravascular ultrasonography. Radiology – Official Journal Of The Association of University Radiologists. vol. 16, i. 4, pp. 412-417. [8] Scheinert, D. et al., 2005. Prevalence and clinical impact of stent fractures after femoropopliteal stenting. Journal of the American College of Cardiology. vol. 45, n. 2. [9] Sozzi, F. B. et al., 2009. Coronary stent fracture and instent restenosis at coronary computed tomography. Journal of the American College of Cardiology. vol. 54. doi:10.1016/j.jacc.2009.05.077. [10] Thomazinho, F. et al., 2008. Tratamento endovascular de aneurisma de artéria poplítea. Jornal Vascular Brasileiro. vol. 7, n.1, pp.38-43 [11] Trabattoni, D. et al., 2010. Incidence of stent fractures and patency after femoropopliteal stenting with the nitinol self-expandable SMART stent: a single-center study. Journal of Cardiovascular Medicine. vol. 11, n.9, pp. 678-682.