Understeer and Oversteer
advertisement

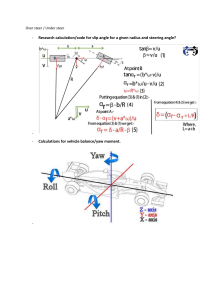
Understeer and Oversteer Bill Terry Students of driving often hear the terms “understeer” and “oversteer.” Often, these terms are introduced in the context of skids, but there is more to them than that. This article is intended to explain these phenomena in considerable, rather technical, detail. Since most PCA-ers drive cars with rear-wheel drive, only such cars are considered in this article. Simplistically, one can define understeer as the condition in which you have to turn the steering wheel more than expected in order to keep the car on a desired arc, and oversteer is the condition in which you have to turn the steering wheel less than expected. When the car follows the steering input exactly, it is said to have neutral steering. What determines how much steering input is “expected”? Different vehicles have different steering sensitivity, and the amount of steering input required to turn on a given arc will vary from car to car. But it doesn’t take long in a particular car to get used to its steering response. You quickly learn what to expect when you turn the steering wheel, and you can easily tell if it is understeering or oversteering significantly. However, a more technical definition of oversteer and understeer involves the so-called understeer gradient.1 The understeer gradient compares the steering input required to hold the car on a circle at increasing speed with the input required to hold the car on the same circle at very low speed. If more and more input is required as speed increases, the understeer gradient is positive and the car is understeering. If less and less steering input is required as speed increases, the understeer gradient is negative and the car is oversteering. Why, at speeds too low to involve skidding, does a car understeer or oversteer? The answer is that the tires are not rigid. The sidewalls flex in turns, and if the front tires flex more than the rear tires, the car will understeer. If the rear tires flex more, the car will oversteer.2 Before I explain this, I want to say a few words about the forces involved in motion along a curved path. Newton’s Second Law of Motion (which is only valid for objects moving at speeds much less than the speed of light in a vacuum) says that the acceleration a that an object of mass m undergoes is equal to the net force F on it divided by its mass, or a=F/m (usually written as F=ma). The boldface type indicates that F and a are vectors, quantities that have both magnitude and direction. The net force is calculated as the vector sum of the individual forces; for example, the vector sum of two forces acting at a right angle to each other is the hypotenuse of the triangle whose perpendicular sides are the individual forces (the direction of the “resultant” force is obvious if you draw the individual forces). F and a can be resolved into components along arbitrarily chosen sets of independent axes, such as longitudinal (front/back), lateral (left/right), and vertical (up/down), which are often denoted as x, y, and z, respectively. Then Newton’s law can be applied to each component separately, as ax=Fx/m, etc. (Fx and ax are the magnitudes of the components of F and a in the x-direction.) Acceleration is the rate of change of the velocity vector v. Velocity can change in either magnitude or direction, or both. In two-dimensional motion, a force that is constant in magnitude and always perpendicular to the velocity causes the object to move in a circle, and it does not change the object’s speed. The acceleration is inward, or centripetal, towards the center of the circle, and its magnitude is equal to v2/r, where v, the speed, is the magnitude of the velocity, and r is the radius of the circle.3 Then the centripetal force required to make an object of mass m move in a circle of radius r is Fc = mv2/r; which tells us that on a circle of a given radius, the required force increases with the square of the object’s speed. When we go around a turn, we feel as though we are being pushed outwards by some force similar to gravity, but in a horizontal direction. Like gravity, this force seems to act on all parts of us in proportion to the mass of each part; such forces are called “body forces.” We call this particular body force “centrifugal force.” But it is not a real force. It is an apparent force, which we perceive because of our inability to distinguish an acceleration from a force in the opposite direction. Our inability to distinguish a body force from an opposite acceleration is an aspect of Einstein’s Principle of Relativity for accelerating reference frames. Further ramifications of this principle are beyond the scope of this article. In reality, in the turn the car and its contents are being accelerated inward, or centripetally, towards the center of the turn. The car’s seats, with their side bolsters and the friction exerted on us by their fabric, push us inward, but it seems to us that there is some magic hand pushing us outward against the seats, which suddenly appears when we begin to turn. There isn’t. The actual force on us is that exerted by the car’s seats, in the centripetal direction. The car itself accelerates centripetally because of the centripetal force exerted on the car’s tires by the pavement, but we feel that centripetal acceleration as a centrifugal force. Something in that last statement may create some confusion. When we push off with our foot from a standstill into a run, we naturally think that it is the force exerted by our foot on the ground that accelerates us. In reality, it is the reaction force that the ground exerts on our foot that causes us to accelerate. Newton’s Second Law of Motion says that it is the net force on an object that determines its acceleration. It is the force exerted by the pavement on the tires that determines the motion of a car, not vice versa. The reaction force, according to Newton’s Third Law of Motion, says that if an object A exerts a force F on an object B, then object B exerts an equal and opposite force (-F) on object A. This law is sometimes stated as “For every action there is an equal and opposite reaction,” but I don’t like that way of stating it because it is too easily misapplied out of its proper context. Since most of us are more easily able to conceptualize centrifugal force than centripetal acceleration, in this article I will draw diagrams and write equations in the reference frame of the car, so I will show an outward centrifugal force when depicting force balances. Such apparent forces in general are called inertial forces, which are opposite in direction from accelerations in arbitrary directions. The sum of the incremental inertial forces on the various parts of an object acts through the center of mass of the object. Performing analyses in the reference frame of an accelerating object and applying inertial forces in place of the actual opposite accelerations is called d’Alembert’s Principle. The car does not accelerate with respect to a reference frame moving with it, so in the car’s reference frame the vector sum of all the forces (including the inertial forces) has to add up to zero. Also, the vector sum of all the “moments,” or torques, around any point on the car must equal zero to keep the car from falling over or flipping end-to-end. A moment may be described as a measure of the ability of a force to produce a rotation, and unless a moment is countered by another moment, it will cause a body to rotate. Now let’s look at Figure 1. Physicists like to draw “free-body diagrams” to depict the forces acting on an object, and Figure 1 is a free-body diagram of a wheel and tire in a turn. In Figure 1, the tire is rolling towards us, and we will only consider the force components in the lateral direction. The center of the turn is to our left. The centrifugal force acts through the center of mass, and the friction force exerted by the pavement on the tire acts at the contact patch where the tire touches the pavement. Because the two opposing forces are not in line with each other, the wheel and tire would tend to fall over, but the rotational moment produced by these two forces is counteracted by an opposite moment exerted by the axle. However, the two forces will cause the sidewall of the tire to flex, as shown in the figure. As the tire rolls forward, the next contact patch to land on the pavement, shown as Patch A in the figure, will land on the pavement slightly to the outside of the current contact patch. Figure 1 – Tire sidewall flexion in turn This sideways displacement persists as the tire rolls along, producing a “slip angle” between the direction in which the tire is aimed and the direction in which it travels over the ground, as shown in Figure 2. In Figure 2, we are looking down on the tire from above. Figure 2 – Slip angle The front and rear tires are not likely to flex equally. Figure 3 shows the usual case, in which the front slip angle is greater than the rear slip angle. This condition produces understeer. The tires are easier to see in an open-wheel race car, which my crude sketch attempts to depict. Figure 3 – Unequal slip angles producing understeer In a turn, if the car is rear-wheel-drive, thrust from the rear wheels will cause the front tires to flex even more, because the front wheels are turned at an angle to the direction in which the thrust is applied to them. This causes the car to understeer more as thrust is increased. The magnitude of the friction force available between the pavement and the tires is given by either Ff ≤ μstN or Ff = μslN, where μ (lower-case Greek letter mu) is called the coefficient of friction and N is the vertical (or “normal”—a term used by mathematicians to mean perpendicular) force on the tire. There are two coefficients of friction; μst is the static coefficient of friction, and μsl is the sliding coefficient of friction. The static coefficient of friction applies until the tire starts to slide, and the sliding coefficient of friction applies once the tire starts sliding. The sliding friction force doesn’t change as the speed of the slide changes. (This description is better for materials that don’t grind each other up as one slides over the other; the situation is actually more complex for tires,4 but it suffices for our purposes.) By Newton’s Third Law of Motion, the direction of the static friction force is opposite to the direction of the net horizontal force the tire exerts on the pavement, which results from the combination of cornering and braking or acceleration. The direction of the sliding friction force is opposite to the direction in which the tire is sliding. Common experience tells us that it is usually easier to keep something sliding than it is to make it start to slide in the first place; accordingly, in many cases (including tires on pavement) μst > μsl. The tire will start to skid across the pavement when Ff = μstN, regardless of the direction in which Ff (the net vector friction force) is exerted. This fact gives rise to the idea of the friction circle, which most serious students of high-performance driving have seen. The pavement can only exert so much force on a tire before the tire skids. If some of that force is used up in accelerating or braking, less is available for cornering. The friction circle is shown in Figure 4. Since this circle represents the force the pavement is exerting on the tire, the cornering forces are centripetal (in either direction, depending on which way the car is turning), thrust is forward, and braking force is rearward. The resultant force Ff, shown in an arbitrary direction, cannot exceed μstN, which is the radius of the circle. Ff is the vector sum of the centripetal and longitudinal forces exerted by the pavement on the contact patch. Note that in the example shown neither the cornering force nor the longitudinal force is great enough to cause a skid, but the resultant of the two forces is. Figure 4 – The friction circle The increased flexion in the front tire sidewalls caused by thrust from the rear wheels when the car is turning occurs because the friction force on the front contact patches increases to resist the thrust from the rear wheels. (If the car were rolling in a straight line, this resistance would not occur, and the car would accelerate; the car still may accelerate in the turn, but the turned front wheels reduce this acceleration.) If the total friction force on the front tires reaches μstN, the front wheels will skid, the friction force on the front tires will drop to μslN, and the car will veer off towards the outside of the corner. This condition is called an understeer skid. Because the direction of the sliding friction force is opposite to the direction of the skid, regardless of the steering wheel angle, turning the steering wheel farther to the inside of the corner has no effect on an understeer skid until you regain traction on the front wheels. You have to back off on the gas pedal, reducing the part of the friction force that was generated to resist the rear-wheel thrust, and then turn the steering wheel in the direction in which you want the car to go. You can also regain traction by turning the steering wheel outward, again reducing the centripetal friction force exerted on the tire by the pavement. If you aim the front wheels in the direction in which they are skidding, the tires will resume rolling without skidding or slipping. Doing this gives the slight advantage that you will drive off the road under control (sort of), rather than skidding off the road out of control. However, you still have to back off on the gas in order to be able to steer the car back towards the inside of the curve. Understeer skids are less common than oversteer skids. Especially in front-engined cars with a lot of forward bias in weight distribution, the available friction force is a lot higher on the front tires than on the rear tires because the vertical force N on the front tires is a lot higher. In this case, the friction circle is smaller for the rear tires, and it is easier to get to the edge of the friction circle by applying too much thrust. In this case, you still have traction on the front tires, but not on the rear. Then the rear wheels skid outward because of centrifugal force and because the available friction force is reduced when the tires are sliding. The proper correction for an oversteer skid is often stated thus: “Steer in the direction of the skid.” If you understand what that means—steer in the direction in which the rear wheels are skidding—you will react properly, but many people in my experience interpret this instruction incorrectly and steer in the direction in which the car is spinning. This makes the skid worse, and once you do that, recovery is almost impossible. I know of three ways to think about how to react that will lead to the correct response: 1) “countersteer”; 2) look (and steer) in the direction in which you want the car to go; and 3) steer in the direction opposite to the direction in which the car is spinning. To make these reactions automatic, it is useful to find an empty parking lot on a Sunday morning after a snowstorm and practice inducing skids and recovering from them, or to participate in the autocross at Georgetown Lake in January. The total vertical force exerted by the pavement on the tires is always equal to the weight of the car plus any aerodynamic downforce (or minus aerodynamic lift), but how these forces are distributed has a profound influence on the occurrence and development of skids, as do changes in this distribution. As noted above, biased front-to-rear weight distribution makes the friction circle on one end of the car smaller, and that end may skid more easily, depending on what inertial forces are affecting the motion of the car. In Figure 5, we see free-body diagrams of the side view of our open-wheel race car at constant speed (a) and with the brakes applied (b). Figure 5 – Free-body diagrams of car at constant speed and braking The car is subject to numerous forces, including weight, aerodynamic drag and lift (or downforce, as shown in the figures), the vertical forces exerted on the tires by the pavement, braking forces or thrust, and a type of friction at the contact patches called rolling resistance. In Figure 5 (a), all of these forces balance. The rotational moments about any axis produced by all of these forces must also balance, as noted above in the discussion of Newton’s Laws of Motion. The moment of a force about an axis is equal to the perpendicular distance from that axis to the line along which the force is applied, multiplied by the component of the force perpendicular to the axis (the component parallel to the axis does not produce a rotation about the axis). Let us consider an axis perpendicular to the page, emerging from the point of contact between the pavement and the rear wheels. The moments about this axis produced by rolling resistance, thrust, and braking are all equal to zero, because the perpendicular distance between the axis and the lines of action of all these forces is zero. Likewise, the moment about this axis of the vertical force on the rear tires is also zero. Then the net moment about our selected axis, which must add up to zero, is the combination of the moments produced by the aerodynamic forces, the weight of the car, and the vertical force exerted by the pavement on the front tires. In Figure 5 (b), the additional moment produced by the inertial force is applied. This moment is in the clockwise direction. However, the net moment must still be zero. If the car hasn’t slowed down yet, the aerodynamic forces remain unchanged, and the weight is always the same, and it always acts through the center of mass. In order to counteract the additional moment, the vertical forces exerted by the pavement on the front tires must increase. Because the total vertical force is always equal to the weight of the car plus any aerodynamic downforce (or minus any lift), the vertical force on the rear wheels must decrease. We speak of this as a shift of the weight of the car toward the front, although the weight distribution, which is actually the distribution of the force of gravity on the car’s various components, does not really change. Similarly, under acceleration, the inertial force is rearward, and the vertical force on the rear tires increases while that on the front tires decreases. Again, we speak of this as a weight shift to the rear. In a turn, the inertial force is centrifugal, and we say that the weight is shifted to the outside tires. A weight shift to the front tires as seen in Figures 5 (a) and 5 (b) will occur even without braking, if the thrust is removed by the driver’s action of lifting his foot off the gas. This reduction in the vertical force on the rear tires from merely lifting can easily shrink the friction circle on the rear wheels enough to cause an oversteer skid. That’s why your DE instructors tell you not to lift your foot off the gas in a turn. Especially in a car like the 911, with a rearward weight bias, the inertia in the rear of the car can cause oversteer skids to be quite violent, requiring a lot of skill and fast reflexes to escape. The idea of apparent weight shift is quite intuitive, and if you are math averse you can stop reading now. But if you don’t get all sweaty when you see an equation, read on for a rigorous demonstration of the “weight shift” phenomenon for the case shown in Figure 5. There is a lot more that could be said about understeer and oversteer, but I hope this article gives you increased insight about what makes these phenomena happen and how to deal with them. For further reading, I recommend Reference 2. Appendix Mathematical demonstration of “weight shift” Note that even at constant speed, some thrust is required to overcome aerodynamic drag and the rolling resistance that the pavement exerts on the tires. In Figure 5, D is the aerodynamic drag, L is the aerodynamic lift or downforce, T is the thrust needed to balance the drag and rolling resistance and keep the car’s speed constant, and W is the weight of the car, the force exerted on the car by gravity. W acts through the center of mass, as shown. Since I can’t make subscripts in my primitive graphics software, I haven’t given shorthand symbols for some of the forces. So now let Rr = rolling resistance at the rear, Rf = rolling resistance at the front, Nr,a = vertical force exerted by the pavement on the rear tires in Figure 5 (a), Nf,a = vertical force exerted by the pavement on the front tires in Figure 5 (a), Nr,b = vertical force exerted by the pavement on the rear tires in Figure 5 (b), Nf,b = vertical force exerted by the pavement on the front tires in Figure 5 (b), Br = braking force at the rear (exerted by the pavement on the rear tires), Bf = braking force at the front, and Fi = inertial force, which acts through the center of mass as shown. Since we are viewing the car here in its own reference frame and applying d’Alembert’s Principle, the inertial force is invoked in place of the actual opposite deceleration. In these figures, the vertical aerodynamic force is assumed to be downward; after all, it is a race car. First, let us consider Figure 5 (a), for the car at constant speed. By Newton’s Second Law of Motion, the sums of the forces in the longitudinal and vertical directions must equal zero. In the longitudinal direction, T – D – Rr – Rf = 0, (1) W + L – Nr,a – Nf,a = 0. (2) and in the vertical direction, The sum of the moments about an axis perpendicular to the page and passing through the center of mass must also equal zero. Although the aerodynamic forces will not usually act through the center of mass (it would just be a coincidence if they did), for simplicity (and without loss of generality) we will assume that they do, and therefore they will not contribute to the total moment. Then, if the distance from the center of mass to the pavement is h, and the distances from the center of mass to vertical lines through the contact patches at the rear and front tires are dr and df, respectively, then the net moment around the center of mass is (T – Rr – Rf)h + Nf,a df – Nr,a dr =0. (3) Next, we consider Figure 5 (b), in which the car is braking. The driver’s foot is off the gas, so T has been removed. The braking forces have been added to the forces of rolling resistance, and the inertial force comes into play because the car is actually decelerating. Then the longitudinal force balance is Fi – D – Rr – Rf – Br – Bf = 0, (4) and the vertical force balance is the same as before, except that the vertical forces on the tires are expected to change: W + L – Nr,b – Nf,b = 0. (5) If the car has not slowed down yet, Rr, Rf, D, and L remain the same. W is also the same. However, the normal forces Nr,b and Nf,b are not the same as they were in the first case. The moment about the center of mass is now Nf,b df – Nr,b dr – (Rr + Rf +Br +Bf)h = 0. (6) From Equation (4), Rr + Rf +Br +Bf = Fi – D, so Equation (6) may be written Nf,b df –Nr,b dr =h(Fi – D). (7) Likewise, from Equation (1), T – Rr – Rf = D, so Equation (3) may be written Nf,a df –Nr,a dr = – hD. (8) Since Fi and D are greater than zero, Fi – D > –D, and from Equations (7) and (8), Nf,b df –Nr,b dr > Nf,a df –Nr,a dr . (9) In view of Equations (2) and (6), Equation (9) implies that Nf,b > Nf,a and Nr,b<Nr,a . (10) Equation (10) means that more of the car’s weight is being supported by the front tires; it is customary to say that the car’s weight has shifted forward, although the actual distribution of mass in the car is unchanged. If you repeat the derivation above, but instead of adding a braking force, you simply remove the thrust T, you will reach the same conclusion: the weight is still shifted to the front tires. The opposite effect occurs under acceleration; the inertial force is rearward, and the weight shifts to the rear. 1 http://en.wikipedia.org/wiki/Understeer_and_oversteer#cite_ref-J670_1-0 Paul Frère, Sports Car and Competition Driving, Robert Bentley, Inc., Cambridge, MA, 1969, pp. 49-58. 3 See any introductory physics textbook, such as Richard T. Weidner and Robert L. Sells, Elementary Classical Physics, Volume I, Allyn and Bacon, Boston, 1965, pp. 73-76. 4 Carlos Canudas-de-Wit, Panagiotis Tsiotras, Efstathios Velenis, Michel Basset, and Gerard Gissinger, “Dynamic Friction Models for Road/Tire Longitudinal Interaction, Draft article, Georgia Institute of Technology, Atlanta, GA, October 14, 2012, http://soliton.ae.gatech.edu/labs/ptsiotra/Papers/vsd02.pdf. 2