Review of Basic Mechanics and Mechanical Systems
advertisement

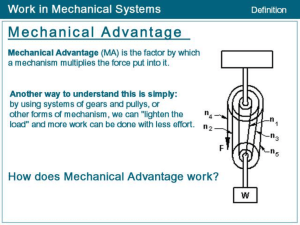
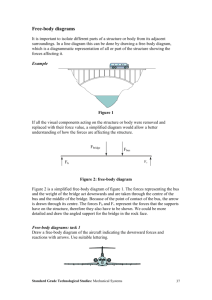
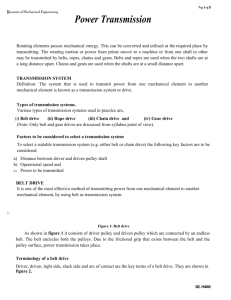
Review of Basic Mechanics and Mechanical Systems a. Levers Property The ratio of the effort arm length to the resistance arm length is inversely proportional to the ratio of the resistance to the effort required to overcome it. Example: ℓ R L E Fulcrum Mathematically, 𝐿 𝑅 = ℓ 𝐸 Where L=Length of effort arm ℓ=Length of resistance arm R=Resistance weight or force E=Effort Mechanical Advantage: The ratio of the required effort to the weight of the object to be removed provides the mechanical advantage of a lever. Thus, Mechanical Advantage = R E If Mechanical Advantage > 1, the lever has positive gain of force. If Mechanical Advantage < 1, the lever has a negative gain of force. b. Grippers Grippers can be considered as levers. The following equation can be used to calculate force and length. Examples: F1 F2 a b F1 a b F2 b a F2 𝐹1 𝑎 = 𝐹2 𝑏 F1 𝐹1 𝑎 = 𝐹2 𝑏 c. Moment of Force The Moment M of force about a point 0 is the perpendicular distance from 0 to the line of action of force F times the force F. 𝑀 = (𝐹). (𝑑) Where , M=Moment , F=Force and d=distance. F may be positive or negative according to the direction of the clockwise or anti-clockwise moment. d. Rotational Kinetic Energy A mass having either linear motion or rotary motion has kinetic energy (KE). Kinetic energy of a mass ‘m’ moving at a velocity v is, 1 𝐾𝑖𝑛𝑒𝑡𝑖𝑐 𝐸𝑛𝑒𝑟𝑔𝑦 = 2 𝑚𝑣 2 Also kinetic energy of a mass ‘m’ moving at an angular velocity of ω is, 1 𝐾𝑖𝑛𝑒𝑡𝑖𝑐 𝐸𝑛𝑒𝑟𝑔𝑦 = 2 𝑚ω2 𝑟 2 Where r is the distance of the particle moving at an angular velocity of ω, from the axis of rotation. Axis of Rotation ω m r Also 𝑉𝑒𝑙𝑜𝑐𝑖𝑡𝑦 = 𝑉 = ωr Kinetic energy of a rotating body is equal to half the sum of the 𝑚𝑣 2 value of all its particles multiplied by the square of its angular speedω. Thus, 1 1 𝐾𝑖𝑛𝑒𝑡𝑖𝑐 𝐸𝑛𝑒𝑟𝑔𝑦 = ∑ 𝑚𝑣 2 = (∑ 𝑚𝑟 2 )ω2 2 2 The quantity 𝐽 = 𝑚𝑟 2 is called Moment of Inertia of the body. Thus, 1 𝐾𝑖𝑛𝑒𝑡𝑖𝑐 𝐸𝑛𝑒𝑟𝑔𝑦 = 𝐽ω2 2 The following table shows moment of inertia, 𝐽 of various shapes of masses around an axis of rotation ‘0’. Table: Moment of Inertia for different body shapes. Shape of the Body Equation m Mass m revolving at a distance r around the axis. r Axis of rotation r 𝐽 = 𝑚𝑟 2 Solid disc of mass m and radius r. 1 𝐽 = 𝑚𝑟 2 2 Annular ring of mass m having a rectangular R1 cross-section. 𝐽= R2 𝑚 2 (𝑅1 + 𝑅22 ) 2 e. Belt Drive & Gears Levers are limited by angle through which they can operate. On the other hand belt and gear can be used on a continuous basis. A pair of rolling cylinders can transfer rotary motion from one shaft to another by using a belt or a gear. s θOUT s θIN rOUT rIN TIN TOUT Mechanical advantage in a belt drive is achieved at the expense of motion. The higher the output torque relative to the input torque, the more turn of the drive pulley are needed per turn of the driven one. The difference between ideal mechanical advantage (IMA) and the actual mechanical advantage (AMA)of belt system is due to friction both in the belt itself and in the shaft bearings. The higher the tension in the belt, the more the friction from both sources, so the belt should only be tight enough to prevent it from slipping on the pulley. If the belt does not slip, linear distance the driving pulley (input) moves is the same as driven pulley (output). Angular displacement of each pulley is as follows, 𝜃𝑖𝑛 = 𝑠 𝑟𝐼𝑁 and 𝜃𝑂𝑈𝑇 = 𝑠 𝑟𝑂𝑈𝑇 Where 𝑟𝐼𝑁 is the radius of driving pulley and 𝑟𝑂𝑈𝑇 is the radius of the driven pulley. 𝑠 (𝑟 ) 𝜃𝑖𝑛 𝑟𝑂𝑈𝑇 = 𝐼𝑁 = 𝑠 𝜃𝑂𝑈𝑇 ( 𝑟𝐼𝑁 𝑟𝑂𝑈𝑇 ) Thus ideal mechanical advantage of a belt driven system is, 𝐼𝑑𝑒𝑎𝑙 𝑀𝑒𝑐ℎ𝑎𝑛𝑖𝑐𝑎𝑙 𝐴𝑑𝑣𝑎𝑛𝑡𝑎𝑔𝑒 = 𝑟𝑂𝑈𝑇 𝑑𝑂𝑈𝑇 𝜃𝐼𝑁 = = 𝑟𝐼𝑁 𝑑𝐼𝑁 𝜃𝑂𝑈𝑇 Where dIN and dOUT are diameters. Actual Mechanical Advantage for a Belt Drive System, 𝐴𝑐𝑡𝑢𝑎𝑙 𝑀𝑒𝑐ℎ𝑎𝑛𝑖𝑐𝑎𝑙 𝐴𝑑𝑣𝑎𝑛𝑡𝑎𝑔𝑒 = 𝑇𝑂𝑈𝑇 𝑇𝐼𝑁 Angular speed ω is given by 𝜔= 𝑑𝜃 𝑑𝑡 Thus, 𝜔𝐼𝑁 = 𝜃𝐼𝑁 ∆𝑡 and 𝜔𝑂𝑈𝑇 = 𝐼𝑀𝐴 = 𝜃𝑂𝑈𝑇 ∆𝑡 𝜃𝐼𝑁 𝜔𝐼𝑁 = 𝜃𝑂𝑈𝑇 𝜔𝑂𝑈𝑇 Thus, 𝜔𝐼𝑁 𝑑𝑂𝑈𝑇 = 𝜔𝑂𝑈𝑇 𝑑𝐼𝑁 Or the ratio of angular speed is the inverse of the ratio of pulley diameters. When motor (input) pulley is smaller than the machine (output) pulley, the machine turns at a smaller number of rpm (revolutions per minute) than the motor but the torque provided to the machine shaft is higher than that of the motor; when motor pulley is larger than machine pulley, the machine speed is higher but the available torque is lower. Example: Page 228 of Phy. Book Gears Gear drives have the advantage over the belt drive to transfer higher torque with less chance of slippage. The disadvantage of using gears is cost, weight and it requires more precision. Spur & Helical Gears Spur gears have their teeth cut parallel to the axis of rotation. Helical Gears Helical gears have curved teeth cut in a spiral pattern at an angle to their axis. Picture: Page 229 of the Phy. Book, Page 46 of the Mechatronics Source Book. Formulas a. Speed Change 𝑣1 𝑛1 = (𝐿𝑖𝑛𝑒𝑎𝑟) 𝑣2 𝑛2 𝜔2 𝑛2 = (𝐴𝑛𝑔𝑢𝑙𝑎𝑟) 𝜔1 𝑛1 v1 and v2 are tangential speed of the gears, n1 and n2 are number of teeth and ω1 and ω2 are tangential speed in radians/seconds. b. Mechanical Advantage ( Theoretical Mechanical Advantage) 𝑇𝑀𝐴 = 𝑣2 𝑛2 = 𝑣1 𝑛1 𝑇𝑀𝐴 = 𝜔2 𝜔1 Where TMA= Theoretical Mechanical Advantage, v1 and v2 are tangential speed of the gears, n1 and n2 are number of teeth and ω1 and ω2are tangential speed in radians/ seconds. c. Torque Advantage 𝑇𝑀𝐴 = 𝑛1 𝑛2 Where n1= number of teeth on the driving gear and n2= number of teeth on the driven gear. 𝑀2 𝑛2 𝑣1 𝜔1 = = = 𝑀1 𝑛1 𝑣2 𝜔2 Where M1 and M2= Turning Moments v1 and v2= Tangential speed of the gear n1 and n2= Number of teeth ω1 and ω2= Tangential Speed in radians/seconds. *Note: Friction is considered to be negligible or zero.