Review of Basic Mechanics and Mechanical Systems
advertisement

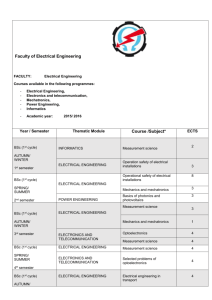
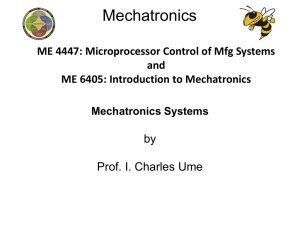
Review of Basic Mechanics and Mechanical Systems MECHATRONICS ENGINEERING TECHNOLOGY Levers • The ratio of the effort arm length to the resistance arm length is inversely proportional to the ratio of the resistance to the effort required to overcome it. ℓ L E R MECHATRONICS ENGINEERING TECHNOLOGY Fulcrum L=Length of effort arm ,ℓ=Length of resistance arm, R=Resistance weight or force E=Effort Mechanical Advantage • The ratio of the required effort to the weight of the object to be removed provides the mechanical advantage of a lever. • If Mechanical Advantage > 1, the lever has positive gain of force. • If Mechanical Advantage < 1, the lever has a negative gain of force. MECHATRONICS ENGINEERING TECHNOLOGY Grippers • Grippers can be considered as levers. The following equation can be used to calculate force and length. • Examples: F1 MECHATRONICS ENGINEERING TECHNOLOGY a F1 F2 a b F2 Moment of Force • The Moment M of force about a point 0 is the perpendicular distance from 0 to the line of action of force F times the force F. M=Moment , F=Force and d=distance MECHATRONICS ENGINEERING TECHNOLOGY Rotational Kinetic Energy • A mass having either linear motion or rotary motion has kinetic energy (KE). Kinetic energy of a mass ‘m’ moving at a velocity v is • Also kinetic energy of a mass ‘m’ moving at an angular velocity of ω is, MECHATRONICS ENGINEERING TECHNOLOGY Rotational Kinetic Energy Axis of Rotation m r Also MECHATRONICS ENGINEERING TECHNOLOGY Kinetic Energy • Kinetic energy of a rotating body is equal to half the sum of the value of all its particles multiplied by the square of its angular speed. or The quantity MECHATRONICS ENGINEERING TECHNOLOGY is called Moment of Inertia of the body Moment of Inertia: Different Types of Bodies MECHATRONICS ENGINEERING TECHNOLOGY Belt Drive & Gears • Levers are limited by angle through which they can operate. On the other hand belt and gear can be used on a continuous basis. • A pair of rolling cylinders can transfer rotary motion from one shaft to another by using a belt or a gear. • Mechanical advantage in a belt drive is achieved at the expense of motion. MECHATRONICS ENGINEERING TECHNOLOGY Belt Drive & Gears •The higher the output torque relative to the input torque, the more turn of the drive pulley are needed per turn of the driven one. MECHATRONICS ENGINEERING TECHNOLOGY is the radius of driving pulley and is the radius of the driven pulley. Mechanical Advantage Ideal Mechanical Advantage Actual Mechanical Advantage MECHATRONICS ENGINEERING TECHNOLOGY Other Important Relationships The ratio of angular speed is the inverse of the ratio of pulley diameters. When motor (input) pulley is smaller than the machine(output) pulley, the machine turns at a smaller number of rpm (revolutions per minute) than the motor but the torque provided to the machine shaft is higher than that of the motor And When motor pulley is larger than machine pulley, the machine speed is higher but the available torque is lower. MECHATRONICS ENGINEERING TECHNOLOGY Gears • Gear drives have the advantage over the belt drive to transfer higher torque with less chance of slippage. The disadvantage of using gears is cost, weight and it requires more precision. MECHATRONICS ENGINEERING TECHNOLOGY Spur Gears • Spur gears have their teeth cut parallel to the axis of rotation. MECHATRONICS ENGINEERING TECHNOLOGY Image Source: http://www.dallasmusic.org/gearhead/ Helical Gears • Helical gears have curved teeth cut in a spiral pattern at an angle to their axis. MECHATRONICS ENGINEERING TECHNOLOGY Image Source: http://www.elizabethtown.kctcs.edu/members/jnail/BRX-Gears.htm More Formulas • Speed Change: v1 and v2 are tangential speed of the gears, n1 and n2 are number of teeth and ω1 and ω2 are tangential speed in radians/seconds. • Mechanical Advantage ( Theoretical Mechanical Advantage): or MECHATRONICS ENGINEERING TECHNOLOGY Torque Advantage Where n1= number of teeth on the driving gear and n2= number of teeth on the driven gear. M1 and M2= Turning Moments v1 and v2= Tangential speed of the gear n1 and n2= Number of teeth ω1 and ω2= Tangential Speed in radians/seconds. MECHATRONICS ENGINEERING TECHNOLOGY *Note: Friction is considered to be negligible or zero.