4. Incompressible Potential Flow - the AOE home page
advertisement

5. Classical Linear Theory
Computational Aerodynamics
5.1 An Introduction
Computational methods based on the linear potential flow theory described in Chapter 4 have
been used to perform a great deal of good aerodynamic design. While some people believe that
these methods are outdated, we believe they still have a valuable place in computational
aerodynamics. This chapter describes two related linear theory approaches – panel methods and
vortex lattice methods - that play important roles in aerodynamics; both approaches rely on the
linear versions of the potential flow equation. For the potential flow assumption to be useful for
aerodynamics calculations the primary requirement is that viscous effects are small, meaning that
the flow is attached. Also, the flow must be either completely subsonic, or completely
supersonic. If the flow contains regions of both subsonic and supersonic flow. then it is termed
transonic, and requires a higher fidelity (nonlinear) flowfield model for a physically correct
theoretical simulation. Note that supersonic velocities can occur locally at surprisingly low
freestream Mach numbers, so great care must be taken to ensure that the flow is not locally
supersonic. For airfoils at very high lift coefficients the peak velocities around the leading edge
can become supersonic at freestream Mach numbers as low as 0.20 ~ 0.25. However, if the local
flow is at a low speed everywhere it can be assumed incompressible (M ≤ 0.4, say), and
Laplace's Equation is essentially an exact representation of the inviscid flow. For higher subsonic
Mach numbers with small disturbances to the freestream flow, the Prandtl-Glauert Equation can
be used. The Prandtl-Glauert Equation can be converted intoto Laplace's Equation by a simple
transformation, which means that incompressible results can be transformed into subsonic
compressible results quite easily.i This provides the basis for estimating the initial effects of
compressibility on the flowfield, i.e., “linearized” subsonic flow, and the flowfield can be found
by the solution of a single linear partial differential equation. Not only is the mathematical
problem much simpler than any of the other equations that can be used to model the flowfield,
but since the problem is linear, a large body of mathematical theory is available.
2/6/2016
5-1
5-2 Applied Computational Aerodynamics
The Prandtl-Glauert Equation can also be used to describe supersonic flows. In that case the
mathematical type of the equation is hyperbolic, as described in Chapter 3. Recall the important
distinction between the two cases:
subsonic flow:
elliptic PDE, each point in the flowfield influences every other
point,
supersonic flow:
hyperbolic PDE, discontinuities can exist, “zone of influence”
solution dependency.
Although there are supersonic as well as subsonic panel methods, vortex lattice methods are only
subsonic. We will discuss the similarities and differences between these methods in this chapter.
See Ericksonii for a good discussion of linear supersonic aerodynamic methods.
5.2 Panel Methods
Although we saw in the last chapter how simple shapes like circular cylinders can be
modeled with combinations of singularities that are solutions of Laplace’s Equation, completely
arbitrary shapes cannot be modeled exactly with singularities placed on the axis, and the
streamline of an arbitrary body determined by specifying the strengths of the singularities.
Instead, we need to use another approach to distributing singularities to model the flowfield.
In this chapter we consider incompressible flow only. One of the key features of Laplace’s
Equation is the property that allows the equation governing the flowfield to be converted from a
three-dimensional problem throughout the field (a PDE) to a two-dimensional problem for
finding the potential variation on the surface (an integral equation). The flowfield solution is then
found using this property by distributing “singularities” of unknown strength over discretized
portions of the surface: panels. Hence the flowfield solution is found by representing the surface
by a number of panels, and solving a linear set of algebraic equations to determine the unknown
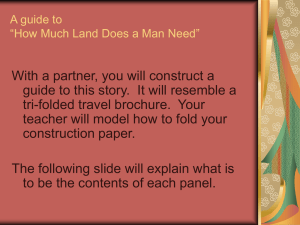
strengths of the singularities;* Fig. 1 illustrates the idea. Figure 1a shows a panel representation
of an airplane, and Figure 1b shows how singularities may be distributed over the panels. The
flexibility and relative economy of the panel methods is so important in practice that the methods
continue to be widely used despite the availability of more exact methods. An entry into the
panel method literature is available through two reviews by Hess, iii,iv the survey by Erickson,ii
and the book by Katz and Plotkin.v
*
The singularities are distributed across the panel. They are not specified at a point. However, the boundary
conditions are usually satisfied at a specific location.
2/6/2016
Classical Linear Theory Computational Aerodynamics 5-3
a) a 7000 panel representation of a transport aircraft with flaps deflected.iv
arrows indicate constant distribution of the singularity across the panel
control point on each panel,
satisfying the no-flow-through condition
smooth surface represented by straight line panelsΣ
b) local surface cut showing distribution of singularities on a panel.
Figure 5.1. Representation of an airplane by a panel model.
The derivation of the integral equation for the potential solution of Laplace’s equation is
given in Section 5.2.1. Details are outlined for one specific approach to solving the integral
equation in Section 5.2.2. For clarity and simplicity of the algebra, the analysis will use the twodimensional case to illustrate the methods. Details are available in Moranvi and Cebeci.vii Both
books contain FORTRAN programs that can be run on many computer systems. This results in
two ironic aspects of the presentation:
2/6/2016
5-4 Applied Computational Aerodynamics
• The algebraic forms of the singularities are different between 2D and 3D, due to 3D relief.
• The power of panel methods arises in three-dimensional applications.
Finally, examples of applications to aerodynamic analysis are presented.
5.2.1 The Integral Equation for the Potential
Potential theory is a well developed (old) and elegant mathematical theory, devoted to the
solution of Laplace’s Equation (as discussed in Chap. 4):
2 0 .
(5.1)
There are several ways to view the solution of this equation. The one most familiar to
aerodynamicists is the notion of “singularities”. These are algebraic functions that satisfy
Laplace’s equation, and can be combined to construct flowfields, as presented in Chapter 4.
Since the equation is linear, superposition of solutions can be used. The most familiar
singularities are the point source(sink), doublet and vortex. In classical examples the singularities
are located inside the body. Unfortunately, as noted above, an arbitrary body shape cannot be
created using singularities placed inside the body. A more sophisticated approach has to be used
to determine the potential flow over arbitrary shapes, and mathematicians have spent a great deal
of time developing this theory. We will draw on a few selected results to help understand the
development of panel methods. Initially, we are interested in the specification of the boundary
conditions. Consider the situation illustrated in Fig. 5.2.
The flow pattern is uniquely determined by giving either:
or
on + {Dirichlet Problem: Design}
(5.2)
/ n on + {Neuman Problem: Analysis} .
(5.3)
Potential flow theory states that you cannot specify both arbitrarily, but can have a mixed
boundary condition, a b / n on + . The Neumann Problem is identified as “analysis”
above because it naturally corresponds to the problem where the flow through the surface is
specified (usually zero). The Dirichlet Problem is identified as “design” because it tends to
correspond to the aerodynamic case where a surface pressure distribution is specified and the
body shape corresponding to the pressure distribution is sought. Because of the wide range of
problem formulations available in linear theory, some analysis procedures appear to be Dirichlet
problems, but Eq. (5-3) must still be used.
2/6/2016
Classical Linear Theory Computational Aerodynamics 5-5
Figure 5.2 also shows a wake behind the body, where the value of the potential can jump.
This is required to allow the flowfield to produce a value for the lift on the body, and will be
discussed further below.
Solid Body
Wake
Figure 5.2. Boundaries for flowfield analysis.
Some other key properties of potential flow theory:
• If either or / n is zero everywhere on then = 0 at all interior points.
• cannot have a maximum or minimum at any interior point. Its maximum value can
only occur on the surface boundary, and therefore the minimum pressure (and
maximum velocity) occurs on the surface.
We need to obtain the equation for the potential in a form suitable for use in panel method
calculations. This section follows the presentation given by Karamchetiviii on pages 344-348 and
Katz and Plotkinv on pages 44-48. An equivalent analysis is given by Moranvi in his Section 8.1.
The objective is to obtain an expression for the potential anywhere in the flowfield in terms of
values on the surface bounding the flowfield. Starting with the Gauss Divergence Theorem,
which relates a volume integral and a surface integral, (given previously in Chap. 3 as Eqn. 3.8)
“ A ndS A dV
v
we follow the classical derivation and consider the interior problem as shown in Fig. 5.3.
2/6/2016
(5.4)
5-6 Applied Computational Aerodynamics
S0
n
z
y
R0
x
Figure 5.3. Nomenclature for integral equation derivation.
To start the derivation introduce the vector function of two scalars:
A grad grad .
(5.5)
Substitute this function into the Gauss Divergence Theorem, Eq. (5.4), to obtain:
div grad grad dV “ grad grad n dS. .
R
(5.6)
S
Now use the vector identity: F F F to simplify the left hand side of Eq. (5.6).
Recalling that A divA , write the integrand of the left hand side of Eq. (5.6) as:
div grad grad
(5.7)
2 2
Substituting the result of Eq. (5.7) for the integrand in the left hand side of Eq. (5.6), we obtain:
dV “ grad grad n dS ,
2
2
R
(5.8)
S
or equivalently (recalling that grad n / n ),
dV “ n n dS .
2
R
2
(5.9)
S
Either statement is known as Green’s theorem of the second form.
Now define = 1/r and = , where is a harmonic function (a function that satisfies
Laplace’s equation). The 1/r term is a source singularity in three dimensions. This makes our
analysis three-dimensional. In two dimensions the form of the source singularity is ln r, and a
2/6/2016
Classical Linear Theory Computational Aerodynamics 5-7
two-dimensional analysis starts by defining = ln r. Now rewrite Eq. (5.8) using the definitions
of and given at the first of this paragraph and switching sides,
1
1
1
“ r r ndS r
S0
2
2
R0
1
dV .
r
(5.10)
R0 is the region enclosed by the surface S0. Recognize that on the right hand side the first term,
2 , is equal to zero from Eq, (5.1) so that Eq. (5.10) becomes
1
1
“ r r ndS
S0
2
R0
1
dV .
r
(5.11)
1
If a point P is external to S0, then 2 0 everywhere since 1/r is a source, and thus satisfies
r
Laplace’s Equation. This leaves the right hand side of Eq. (5.11) equal to zero, with the
following result:
1
1
“ r r ndS 0 .
(5.12)
S0
However, we have included the origin in our region S0 as defined above. If P is inside S0, then
1
2 at r = 0. Therefore, we exclude this point by defining a new region which excludes
r
the origin by drawing a sphere of radius around r = 0, and applying (5.12) to the region
between and S0:
1
1
1
“ r r n dS “ r r r
S0
1 4 4 4 4 2 4 4 4 43
arbitrary region
dS 0
1 4 44 2 4 4 43
2
(5.13)
sphere
or:
1
“ r r r
2
1
1
dS “ ndS .
r
r
S
(5.14)
0
Consider the first integral on the left hand side of Eq. (5.14). Let 0, where (as 0)
we take constant ( / r 0 ), assuming that is well-behaved and using the mean value
theorem. Then we need to evaluate
2/6/2016
5-8 Applied Computational Aerodynamics
dS
“ r
2
over the surface of the sphere where = r. Recall that for a sphere the elemental area is (see
Hildebrand,ix for an excellent review of spherical coordinates and vector analysis):
dS r 2 sin d d
(5.15)
where we define the angles in Fig. 5.4. Do not confuse the classical notation for the spherical
coordinate angles with the potential function. The spherical coordinate will disappear as soon
as we evaluate the integral.
z
P
y
x
Figure 5.4. Spherical coordinate system nomenclature.
Substituting for dS in the integral above, we get:
“ sin d d .
Integrating from = 0 to , and from 0 to 2, we get:
2
0
0
sin d d 4 .
(5.16)
The final result for the first integral in Eq. (5.14) is:
1
“ r r r
2
dS 4 .
(5.17)
Replacing this integral by its value from Eq. (5.17) in Eq. (5.14), we can write the expression
for the potential at any point P as (where the origin can be placed anywhere inside S0):
p
1
4
1
1
“ r r ndS
(5.18)
s0
and the value of at any point p is now known as a function of and / n on the boundary.
2/6/2016
Classical Linear Theory Computational Aerodynamics 5-9
We used the interior region to allow the origin to be written at point p. This equation can be
extended to the solution for for the region exterior to R0. Apply the results to the region
between the surface SB of the body and an arbitrary surface enclosing SB and then let go to
infinity. The integrals over go to ∞ as goes to infinity. Thus potential flow theory is used to
obtain the important result that the potential at any point p' in the flowfield outside the body can
be expressed as:
p
1
4
1
1
“ r r ndS .
(5.19)
SB
Here the unit normal n is now considered to be pointing outward and the area can include not
only solid surfaces but also wakes. Equation 5.19 can also be written using the dot product of the
normal and the gradient as:
p
1
4
1
1
“ r n n r dS .
(5.20)
SB
The 1/r in Eq. (5.19) can be interpreted as a source of strength / n , and the (1/r) term
in Eq. (5.19) as a doublet of strength . Both of these functions play the role of Green’s functions
in the mathematical theory. Therefore, we can find the potential as a function of a distribution of
sources and doublets over the surface. The integral in Eq. (5.20) is normally broken up into body
and wake pieces. The wake is generally considered to be infinitely thin. Therefore, only doublets
are used to represent the wakes.
Now consider the potential to be given by the superposition of two different known
functions, the first and second terms in the integral, Eq. (5-20). These can be taken to be the
distribution of the source and doublet strengths, and , respectively. Thus Eq (5.20) can be
written in the form usually seen in the literature,
p
1
4
1
1
“ r n r dS .
(5.21)
SB
The problem is to find the values of the unknown source and doublet strengths and for a
specific geometry and given freestream, .
What just happened? We replaced the requirement to find the solution over the entire
flowfield (a three-dimensional problem) with the problem of finding the solution for the
2/6/2016
5-10 Applied Computational Aerodynamics
singularity distribution over a surface (a two-dimensional problem). In addition, we now have an
integral equation to solve for the unknown surface singularity distributions instead of a partial
differential equation. The problem is linear, allowing us to use superposition to construct
solutions. We also have the freedom to pick whether to represent the solution as a distribution of
sources or doublets distributed over the surface. In practice it’s been found best to use a
combination of sources and doublets. The theory can also be extended to include other
singularities.
At one time the change from a three-dimensional to a two-dimensional problem was
considered significant. However, the total information content is the same computationally. This
shows up as a dense “2D” matrix compared to a large, but sparse “3D” matrix. As computational
methods for sparse matrix solutions evolved, the problems became nearly equivalent. The
advantage in using the panel methods arises because there is no need to define a grid throughout
the flowfield.
This is the theory that justifies panel methods, i.e. that we can represent the surface by panels
with distributions of singularities placed on them. Special precautions must be taken when
applying the theory described here. Care should be used to ensure that the region SB is in fact
completely closed. In addition, care must be taken to ensure that the outward normal is properly
defined.
Furthermore, in general, the interior problem cannot be ignored. Surface distributions of
sources and doublets affect the interior region as well as the exterior. In some methods the
interior problem is implicitly satisfied. In other methods the interior problem requires explicit
attention. The need to consider this subtlety arose when advanced panel methods were
developed. The problem is not well posed unless the interior problem is considered, and
numerical solutions failed when this aspect of the problem was not addressed. References ii and
v provide further discussion.
When the exterior and interior problems are formulated properly the boundary value problem
is properly posed. Additional discussions are available in the books by Ashley and Landahl x and
Curle and Davis.xi
We implement the ideas give above by:
a) approximating the surface by a series of line segments
b) placing distributions of sources and vortices or doublets on each panel.
2/6/2016
Classical Linear Theory Computational Aerodynamics 5-11
There are many ways to tackle the problem (and many codes). Possible differences in
approaches to the implementation include the use of:
- various singularities
- various distributions of the singularity strength over each panel
- panel geometry (panels don’t have to be flat).
Recall that superposition allows us to construct the solution by adding separate contributions
[Watch out! You have to get all of them. Sometimes this can be a problem]. Thus we write the
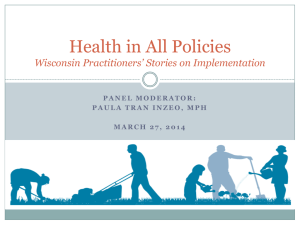
potential as the sum of several contributions. Figure 5.5 provides an example of a panel
representation of an airplane being used to develop the aerodynamic characteristics of a
morphing airplane for a flight simulation. The surface is colored to represent the pressure
distribution on the plane predicted by the panel model. The wakes are shown, and a more precise
illustration of a panel method representation is given in Section 5.2.4.
Figure 5.5. Panel model representation of an airplane.xii Wakes not shown.
An example of the implementation of a panel method is carried out in Section 5.2.2 in two
dimensions. To do this, we write down the two-dimensional version of Eq. 5.21. In addition, we
use a vortex singularity in place of the doublet singularity (Ref. ii and v provide details on this
change). The resulting expression for the potential is:
2/6/2016
5-12 Applied Computational Aerodynamics
{
uniform onset flow
V x cos V y sin
(s)
q(s)
ds
ln r
2
12
4 2 43
123
q is the 2D
this is a vortex singularity
source strength
of strength (s)
(5.22)
S
and = tan (y/x). Equation (5.22) shows contributions from various components of the
-1
flowfield, but the relation is still exact. No small disturbance assumption has been made.
5.2.2 An Example: The Classic Hess and Smith Method
A.M.O. Smith at Douglas Aircraft directed an incredibly productive aerodynamics development
group in the late ’50s through the early ’70s. In this section we describe the implementation of
the theory given above that originated in his group.* Our derivation follows Moran’s
descriptionvi of the Hess and Smith method quite closely. The approach is to i) break up the
surface into straight line segments, ii) assume the source strength distribution is constant over
each line segment (panel) but has a different value for each panel, and iii) distribute a vortex
singularity distribution over each panel, but with the vortex strength constant and equal over
each panel.
Think of the constant vortices as adding up to the circulation to satisfy the Kutta condition.
The sources are required to satisfy flow tangency on the surface (thickness).
Figure 5.6 illustrates the representation of a smooth surface by a series of line segments. The
numbering system starts at the lower surface trailing edge and proceeds forward, around the
leading surface and aft to the upper surface trailing edge. N+1 points define N panels. Note that
other implementations may use other numbering schemes.
Figure 5.6. Representation of a smooth airfoil with straight line segments.
*
In the AIAA book, Applied Computational Aerodynamics, A.M.O. Smith contributed the first chapter, an account
of the initial development of panel methods.
2/6/2016
Classical Linear Theory Computational Aerodynamics 5-13
The potential relation given above in Eq. (5.22) can then be evaluated by breaking the
integral up into segments along each panel:
q(s)
2 ln r 2 dS
j1 panel j
N
V x cos ysin
(5.23)
with q(s) taken to be constant on each panel, allowing us to write q(s) = qi, i = 1, ... N. Here we
need to find N values of qi and one value of .
Use Figure 5.7 to define the nomenclature on each panel. Let the ith panel be the one
between the ith and i+1th nodes, and let the ith panel’s inclination to the x axis be . Under these
assumptions the sin and cos of are given by:
sin i
yi1 yi
,
li
cos i
xi1 xi
li
(5.24)
and the normal and tangential unit vectors are:
ni sini i cosi j
.
t i cosi i sini j
(5.25)
j
i
li
i +1
i
i
x
a) basic nomenclature
ti
ni
i +1
i
i
x
b) unit vector orientation
Figure 5.7. Nomenclature for local coordinate systems.
We will find the unknowns by satisfying the flow tangency condition on each panel at one
specific control point (also known as a collocation point) and requiring the solution to satisfy a
Kutta condition. The control point will be picked to be at the mid-point of each panel, as shown
in Fig. 5.8.
2/6/2016
5-14 Applied Computational Aerodynamics
y
•
X
•
smooth shape
control point
panel
x
Figure 5.8. Local panel nomenclature.
Thus the coordinates of the midpoint of the control point are given by:
xi
xi xi1
,
2
yi
yi yi1
2
(5.26)
and the velocity components at the control point xi , yi are ui u(xi , yi ), vi v(xi , yi ).
The flow tangency boundary condition is given by V n 0 , and is written using the
relations given here as (in the original coordinate system):
ui i vi j sini i cosi j 0
or
ui sin i vi cosi 0, for each i, i = 1, ..., N .
(5.27)
The remaining relation is found from the Kutta condition. This condition states that the flow
must leave the trailing edge smoothly. Many different numerical approaches have been adopted
to satisfy this condition. In practice this implies that at the trailing edge the pressures on the
upper and lower surface are equal. Here the Kutta condition is satisfied approximately by
equating velocity components tangential to the panels adjacent to the trailing edge on the upper
and lower surface. Because of the importance of the Kutta condition in determining the flow, the
solution is extremely sensitive to the flow details at the trailing edge. Since the assumption is
made that the velocities are equal on the top and bottom panels at the trailing edge we need to
understand that we must make sure that the last panels on the top and bottom are small and of
equal length, otherwise we have an inconsistent approximation. Accuracy will deteriorate rapidly
if the trailing edge panels are not the same length. The specific numerical formula is developed
using the nomenclature for the trailing edge shown in Fig. 5.9. In two-dimensions, and especially
for a single airfoil, the Kutta condition is sufficient to handle the wake, and we don’t have to
address the wake explicitly in the formulation. This is not the case in three dimensions.
2/6/2016
Classical Linear Theory Computational Aerodynamics 5-15
•
N
tN
N+1
•
•
t1
2
1
Figure 5.9. Trailing edge panel nomenclature.
Equating the magnitude of the tangential velocities on the upper and lower surface:
ut1 ut N .
(5.28)
and taking the difference in direction of the tangential unit vectors into account this is written as
Vt 1 Vt N .
(5.29)
Carrying out the operation in the original coordinate system we get the relation:
u1i v1 j cos1i sin1 j uN i vN j cos N i sin N j
which is expanded to obtain the final relation:
u1 cos1 v1 sin 1 u N cos N vN sin N
(5.30)
The expression for the potential in terms of the singularities on each panel and the boundary
conditions derived above for the flow tangency and Kutta condition are used to construct a
system of linear algebraic equations for the strengths of the sources and the vortex. The steps
required are summarized below.
Steps to determine the solution:
1. Find the algebraic equations defining the “influence” coefficients. These are the
relations connecting the velocities induced by the singularity distribution of unit
strength over a panel at a control point. Each control point will have an influence
coefficient for each of the panels on the surface, and are a function of the geometry.
2. Write down the velocities, ui, vi, in terms of contributions from all the singularities.
This includes qi, from each panel and the influence coefficients.
To generate the system of algebraic equations:
3. Write down flow tangency conditions in terms of the velocities (N eqn’s., N+1
unknowns).
4. Write down the Kutta condition equation to get the N+1 equation.
2/6/2016
5-16 Applied Computational Aerodynamics
5. Solve the resulting linear algebraic system of equations for the unknown qi and .
6. Given qi and , write down the equations for uti, the tangential velocity at each panel
control point.
7. Determine the pressure distribution from Bernoulli’s equation using the tangential
velocity on each panel.
The details are easily carried out, but the algebra gets tedious.
Program PANEL
In this section we illustrate the results of the procedure outlined above. Program PANEL is an
exact implementation of the analysis described above, and is essentially the program given by
Moran.vi Other panel method programs are available in the textbooks by Cebeci,vii Houghton and
Carpenter,xiii and Kuethe and Chow.xiv Two other similar programs are available. A MATLAB
program, Pablo, written at KTH in Sweden is available on the web,xv as well as the program by
Professor Drela at MIT, XFOIL.xvi Moran’s program includes a subroutine to generate the
ordinates for the NACA 4-digit and 5-digit airfoils (see Appendix A for a description of these
airfoil sections). The main drawback is the requirement for a trailing edge thickness that is
exactly zero. To accommodate this restriction, the ordinates generated internally have been
altered slightly from the official ordinates. The extension of the program to handle arbitrary
airfoils is an exercise. The freestream velocity in PANEL is assumed to be unity, since the
inviscid solution in coefficient form is independent of scale.
PANEL’s node points are distributed employing the widely used cosine spacing function.
The equation for this spacing is given by defining the points on the thickness distribution to be
placed at:
i 1
xi 1
1 cos
c 2
N 1
i 1,..., N .
(5-31)
These locations are then altered when camber is added (see Eqns. A-1 and A-2 in App. A).
This approach is used to provide a smoothly varying distribution of panel node points that
concentrate points around the leading and trailing edges.
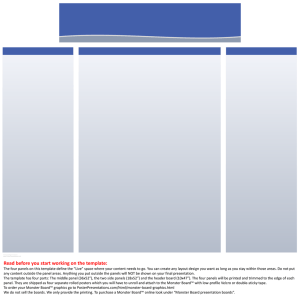
An example of the accuracy of program PANEL is illustrated in Fig. 5.10, where the results
from PANEL for the NACA 4412 airfoil are compared with results obtained from an exact
conformal mapping of the airfoil (Conformal mapping methods were described in Chapter 4.
2/6/2016
Classical Linear Theory Computational Aerodynamics 5-17
Conformal transformations can also be used to generate meshes of points for use in CFD
methods). The agreement is nearly perfect.
Numerical studies need to be conducted to determine how many panels are required to obtain
accurate results. Both forces and moments and pressure distributions should be examined. You
can select the number of panels used to represent the surface. How many should you use? Most
computational programs provide the user with freedom to decide how detailed (expensive - in
dollars or time) the calculations should be. One of the first things the user should do is evaluate
how detailed the calculation should be to obtain the level of accuracy desired. In the PANEL
code your control is through the number of panels used.
-2.50
PANEL
Exact Conformal Mapping
-2.00
-1.50
-1.00
Cp
-0.50
0.00
0.50
1.00
-0.2
0.0
0.2
0.4
0.6
0.8
1.0
1.2
x/c
Figure 5.10. Comparison of results from program PANEL with an essentially exact
mapping solution for the NACA 4412 airfoil at 6° angle-of-attack.
We check the sensitivity of the solution to the number of panels by comparing force and
moment results and pressure distributions with increasing numbers of panels. This is done using
two different methods. Figures 5.11 and 5.12 present the change of drag and lift, respectively, by
2/6/2016
5-18 Applied Computational Aerodynamics
varying the number of panels. For PANEL, which uses an inviscid incompressible flowfield
model, the drag should be exactly zero. The drag coefficient found by integrating the pressures
over the airfoil is an indication of the error in the numerical scheme. The drag obtained using a
surface (or “nearfield”) pressure integration is a numerically sensitive calculation, and is a strict
test of the method. The figures show the drag going to zero, and the lift becoming constant as the
number of panels increase. In this style of presentation it is hard to see exactly how quickly the
solution is converging to a fixed value.
The results given in Figs. 5.11 and 5.12 indicate that 60-80 panels (30 upper, 30 lower for
example) should be enough panels. Note that the lift coefficient is presented in an extremely
expanded scale, and the drag coefficient presented in Fig. 5.13 also uses an expanded scale.
Because drag is typically a small number, it is frequently described in drag counts, where 1 drag
count is a CD of 0.0001.
To estimate the limit for an infinitely large number of panels the results can be plotted as a
function of the reciprocal of the number of panels. Thus the limit result occurs as 1/n goes to
zero. Figures 5.13, 5.14, and 5.15 present the results in this manner for the case given above, and
with the pitching moment included for examination in the analysis.
0.012
NACA 0012 Airfoil, = 8°
0.010
0.008
C
D
0.006
0.004
0.002
0.000
0
20
40
60
No. of Panels
80
100
Figure 5.11. Change of drag with number of panels.
2/6/2016
120
Classical Linear Theory Computational Aerodynamics 5-19
0.980
NACA 0012 Airfoil, = 8°
0.975
0.970
C
L
0.965
0.960
0.955
0.950
0
20
40
60
80
No. of Panels
100
120
Figure 5.12. Change of lift with number of panels.
0.012
0.010
NACA 0012 Airfoil, = 8°
0.008
C
0.006
D
0.004
0.002
0.000
0
0.01
0.02
0.03
1/n
0.04
0.05
0.06
Figure 5.13. Change of drag with the inverse of the number of panels.
The results given in Figures 5.13 through 5.15 show that the program PANEL produces
results that are relatively insensitive to the number of panels once fifty or sixty panels are used,
and by extrapolating to 1/n = 0 an estimate of the limiting value can be obtained.
2/6/2016
5-20 Applied Computational Aerodynamics
0.980
NACA 0012 Airfoil, = 8°
0.975
C
L
0.970
0.965
0.960
0.955
0.950
0
0.01
0.02
0.03
0.04
0.05
0.06
1/n
Figure 5.14. Change of lift with the inverse of the number of panels.
-0.240
NACA 0012 Airfoil, = 8°
-0.242
-0.244
C
m
-0.246
-0.248
-0.250
0
0.01
0.02
0.03
0.04
0.05
0.06
1/n
Figure 5.15. Change of pitching moment with the inverse of the number of panels.
In addition to forces and moments, the sensitivity of the pressure distributions to changes in
panel density must also be investigated: pressure distributions are shown in Figs. 5.16 and 5.17.
The 20 and 60 panel results are given in Fig. 5.16. In this case it appears that the pressure
distribution is well defined with 60 panels. This is confirmed in Figure 5-17, which demonstrates
that it is almost impossible to identify the differences between the 60 and 100 panel cases. This
type of study should (in fact must) be conducted when using computational aerodynamics
methods.
2/6/2016
Classical Linear Theory Computational Aerodynamics 5-21
-5.00
NACA 0012 airfoil, = 8°
-4.00
20 panels
60 panels
-3.00
-2.00
C
P
-1.00
0.00
1.00
0.0
0.2
0.4
0.6
0.8
1.0
x/c
Figure 5.16. Pressure distribution from progrm PANEL,
comparing results using 20 and 60 panels.
-5.00
NACA 0012 airfoil, = 8°
-4.00
60 panels
100 panels
-3.00
-2.00
C
P
-1.00
0.00
1.00
0.0
0.2
0.4
x/c
0.6
0.8
Figure 5.17. Pressure distribution from program PANEL,
comparing results using 60 and 100 panels.
2/6/2016
1.0
5-22 Applied Computational Aerodynamics
Having examined the convergence of the mathematical solution, we investigate the
agreement with experimental data. Figure 5.18 compares the lift coefficients from the inviscid
solutions obtained from PANEL with experimental data from Abbott and von Doenhof.xvii
Agreement is good at low angles of attack, where the flow is fully attached. The agreement
deteriorates as the angle of attack increases, and viscous effects start to show up as a reduction in
lift with increasing angle of attack, until, finally, the airfoil stalls. The inviscid solutions from
PANEL cannot capture this part of the flow physics. The different stall character between the
two airfoils arises due to different flow separation locations on the different airfoils. The
cambered airfoil separates at the trailing edge first. Stall occurs gradually as the separation point
moves forward on the airfoil with increasing incidence. The uncambered airfoil stalls due to a
sudden separation at the leading edge. An examination of the difference in pressure distributions
can be made to see why this might be the case.
2.50
2.00
1.50
C
L
1.00
0.50
CL, NACA 0012 - PANEL
CL, NACA 0012 - exp. data
0.00
CL, NACA 4412 - PANEL
CL, NACA 4412 - exp. data
-0.50
-5.0°
0.0°
5.0°
10.0°
15.0°
20.0°
25.0°
Figure 5.18. Comparison of PANEL lift predictions with experimental data (Ref. xvii).
2/6/2016
Classical Linear Theory Computational Aerodynamics 5-23
The pitching moment characteristics are also important. Figure 5.19 provides a comparison
of the PANEL pitching moment predictions (taken about the quarter chord point) with
experimental data. In this case the calculations indicate that the computed location of the
aerodynamic center, dCm / dCL 0 , is not exactly at the quarter chord, although the
experimental data is very close to this value. The uncambered NACA 0012 data shows nearly
zero pitching moment until flow separation starts to occur. The cambered airfoil shows a
significant nose down pitching moment, Cm0, and a trend with angle of attack due to viscous
effects that is exactly opposite the inviscid prediction. This occurs because the separation is
moving forward from the trailing edge of the airfoil and the load over the aft portion of the airfoil
does not increase as fast as the forward loading. This leads to a nose up pitching moment until
eventually the separation causes the airfoil to stall, resulting in a nose down pitching moment.
0.10
0.05
-0.00
Cm
-0.05
c/4
-0.10
-0.15
Cm, NACA 0012 - PANEL
Cm, NACA 4412 - PANEL
Cm, NACA 0012 - exp. data
Cm, NACA 4412 - exp. data
-0.20
-0.25
-0.30
-5.0
0.0
5.0
10.0
15.0
20.0
25.0
Figure 5.19 Comparison of PANEL moment predictions with experimental data, (Ref. xvii).
We do not compare the drag prediction from PANEL with experimental data. For twodimensional incompressible inviscid flow the drag is theoretically zero. In the actual case, drag
arises from skin friction effects, further additional form drag due to the small change of pressure
on the body due to the boundary layer (which primarily prevents full pressure recovery at the
2/6/2016
5-24 Applied Computational Aerodynamics
trailing edge), and drag due to increasing viscous effects with increasing angle of attack. A well
designed airfoil will have a drag value very nearly equal to the skin friction and nearly invariant
with incidence until the maximum lift coefficient is approached.
In addition to the force and moment comparisons, we need to compare the pressure
distributions predicted with PANEL to experimental data. Figure 5.20 provides one example.
The NACA 4412 experimental pressure distribution is compared with PANEL predictions. In
general the agreement is very good. The primary area of disagreement is at the trailing edge.
Here viscous effects act to prevent the recovery of the experimental pressure to the levels
predicted by the inviscid solution. The disagreement on the lower surface is a little surprising,
and suggests that the angle of attack from the experiment may not be precise.
-1.2
data from NACA R-646
-0.8
-0.4
Cp
-0.0
Predictions from PANEL
0.4
= 1.875°
M = 0.191
Re = 720,000
transition free
0.8
NACA 4412 airfoil
1.2
0.0
0.2
0.4
x/c
0.6
0.8
1.0
1.2
Figure 5.20. Comparison of pressure distribution from PANEL with data,xviii
Panel methods often have trouble with accuracy at the trailing edge of airfoils with cusped
trailing edges, when the included angle at the trailing edge is zero. Figure 5.21 shows the
predictions of program PANEL compared with an exact mapping solution (a FLO36xix run at
low Mach number) for two cases. Figure 5.21a is for a case with a small trailing edge angle: the
2/6/2016
Classical Linear Theory Computational Aerodynamics 5-25
NACA 651-012, while Fig. 5.21b is for the more standard 6A version of the airfoil. The
corresponding airfoil shapes are shown Fig. 5.22. The “loop” in the pressure distribution in Fig.
5.21a is an indication of a problem with the method.
-0.60
-0.60
PANEL
-0.40
FLO36
-0.20
Cp
0.00
FLO36
-0.40
PANEL
-0.20
Cp
0.00
0.20
0.20
NACA 651-012
= 8.8°
0.40
0.60
0.6
0.7
0.8
0.9
X/C
0.40
1.0
1.1
0.60
0.6
a. 6-series, cusped TE
NACA 651A012
= 8.8°
0.7
0.8
0.9 1.0
X/C
b. 6A-series, finite TE angle
1.1
Figure 5.21. PANEL Performance near the airfoil trailing edge
0.05
y/c
0.00
NACA 65(1)-012
NACA 65A012
-0.05
0.70
0.80
x/c
0.90
1.00
Figure 5.22. Comparison at the trailing edge of 6- and 6A-series airfoil geometries.
This case demonstrates a situation where this particular panel method is not accurate. Is this
a practical consideration? Yes and no. The 6-series airfoils were theoretically derived by
specifying a pressure distribution and determining the required shape. The small trailing edge
angles (less than half those of the 4-digit series), cusped shape, and the unobtainable zero
thickness specified at the trailing edge resulted in objections from the aircraft industry. These
airfoils were very difficult to manufacture and use on operational aircraft. Subsequently, the 6Aseries airfoils were introduced to remedy the problem. These airfoils had larger trailing edge
angles (approximately the same as the 4-digit series), and were made up of nearly straight (or
2/6/2016
5-26 Applied Computational Aerodynamics
flat) surfaces over the last 20% of the airfoil. Most applications of 6-series airfoils today actually
use the modified 6A-series thickness distribution. This is an area where the user should check the
performance of a particular panel method.
5.2.3 Geometry and Design
Effects of Shape Changes on Pressure Distributions: So far we have been discussing
aerodynamics from an analysis point of view. To develop an understanding of the typical effects
of adding local modifications to the airfoil surface, Exercise 5 provides a framework for the
reader to carry out an investigation to help understand what happens when changes are made to
the airfoil shape. It is also worthwhile to investigate the very powerful effects that small
deflections of the trailing edge can produce. This reveals the power of the Kutta condition, and
alerts the aerodynamicist to the basis for the importance of viscous effects at the trailing edge.
Making ad hoc changes to an airfoil shape is extremely educational when implemented in an
interactive computer program, where the aerodynamicist can easily make shape changes and see
the effect on the pressure distribution immediately. An outstanding code that does this has been
created by Ilan Kroo and is known as PANDA.
xx
Strictly speaking, PANDA is not a panel
method, but it is an accurate subsonic airfoil prediction method.
Shape for a specified pressure distribution: There is another way that aerodynamicists view
the design problem. Although the local modification approach described above is useful to make
minor changes in airfoil pressure distributions, often the aerodynamic designer wants to find the
geometric shape corresponding to a prescribed pressure distribution from scratch. This problem
is known as the inverse problem. This problem is more difficult than the analysis problem. It is
possible to prescribe a pressure distribution for which no geometry exists. Even if the geometry
exists, it may not be acceptable from a structural standpoint. For two-dimensional incompressible
flow it is possible to obtain conditions on the surface velocity distribution that ensure that a
closed airfoil shape exists. Excellent discussions of this problem have been given by Volpexxi and
Sloof.xxii A two-dimensional inverse panel method has been developed by Bristow.xxiii XFOIL
also has an inverse design option.xvi Numerical optimization can also be used to find the shape
corresponding to a prescribed pressure distribution.xxiv
2/6/2016
Classical Linear Theory Computational Aerodynamics 5-27
5.2.4 Issues in the Problem formulation for 3D potential flow over aircraft
The extension of panel methods to three dimensions leads to fundamental questions
regarding the proper specification of the potential flow problem for flow over an aircraft. The
main problem is how to model the wake coming from the fuselage aft of the wing and wing tips.
The issue is how to specify the wake behind surfaces without sharp edges. The Kutta condition
applies to distinct edges, and is not available if there are not well defined trailing edges.
In some methods wakes are handled automatically. In other methods the wakes must be
specified by the user. This provides complete control over the simulation, but means that the user
must understand precisely what the problem statement should be. The details of the wake
specification often cause users difficulties in making panel models. Figure 5.23, from Erickson,ii
shows an example of a panel model including the details of the wakes. For high lift cases and for
cases where wakes from one surface pass near another, wake deflection must be computed as
part of the solution. Figure 5.24 comes from a one week “short” course that was given to
prospective users of an advanced panel method, PAN AIR.xxv Each surface has to have a wake,
and the wakes need to be connected, as illustrated in Fig.5.24. The modeling can be complicated.
Special attention to wake layout must be made by the user. To ensure that the problem is
properly specified and to examine the entire flowfield in detail a complete graphics capability is
required.
Hessxxvi provides an excellent discussion of these problems. Many different approaches have
been used. Carmichael and Ericksonxxvii also provide good insight into the requirements for a
proper panel method formulation. Similarly, references ii and v provide good overviews.
As illustrated above, a practical aspect of using panel methods is the need to pay attention to
details (actually true for all engineering work). This includes making sure that the outward
surface normal is oriented in the proper direction and that all surfaces are properly enclosed.
Aerodynamics panel methods generally use quadrilateral panels to define the surface. Since three
points determine a plane, the quadrilateral may not necessarily define a consistent flat surface. In
practice, the methods actually divide panels into triangular elements to determine an estimate of
the outward normal. It is also important that edges fit so that there is no leakage in the panel
model representation of the surface. Nathman has recently extended a panel method to have
panels include “warp”.xxviii
2/6/2016
5-28 Applied Computational Aerodynamics
Figure 5.23. Illustration of the panel model of an F-16XL,ii including the wakes
usually not shown in figures of panel models, but critical to the model.
Figure 5.24. Details of a panel model showing the wake model details and that the wakes
are connected. (from a viewgraph presented at a PAN AIR user’s short course, Ref. xxv)
There is one other significant difference between two-dimensional and three-dimensional
panel methods. Induced drag occurs even in inviscid, irrotational flow, and this component of
drag can be computed by a panel model. However, its calculation by integration of pressures
over the surface requires extreme accuracy, as we saw above for the two-dimensional example.
The use of a farfield momentum approach is much more accurate. For drag this is known as a
Trefftz plane analysis, see Katz and Plotkin.v
2/6/2016
Classical Linear Theory Computational Aerodynamics 5-29
5.2.5 Example applications of panel methods
Many examples of panel methods have been presented in the literature. Figure 5.25 shows
an example of the use of a panel model to evaluate the effect of the space shuttle on the Boeing
747. This is a classic example. Other uses include the simulation of wind tunnel walls, support
interference, and ground effects. Panel methods are also used in ocean engineering. Recent
America’s Cup designs have been dependent on panel methods for hull and keel design. The
effects of the free surface can be treated using panel methods.
Figure 5.25. The space shuttle mounted on a Boeing 747.
(from the cover of an AIAA Short Course with the title Applied Computational Aerodynamics)
One example has been selected to present in some detail. It is an excellent illustration of
how a panel method is used in design, and provides a realistic example of the typical agreement
that can be expected between a panel method and experimental data in a demanding real world
application. The work was done by Ed Tinoco and co-workers at Boeing.xxix Figure 5.26 shows
the modifications required to modify a Boeing 737-200 to the 737-300 configuration. The panel
method was used to investigate the design of a new high lift system. They used PAN AIR, which
is a Boeing developed advanced panel method.xxx Figure 5.27 shows the panel method
representation of the airplane.
2/6/2016
5-30 Applied Computational Aerodynamics
Figure 5.26. The Boeing 737-300 relative to the model 737-200 (Ref. xxix.).
Figure 5.27. The panel representation of the 737-300 with 15° flap deflection (Ref.
xxix).
2/6/2016
Classical Linear Theory Computational Aerodynamics 5-31
An understanding of the wing flowfield for two different takeoff flap settings was desired.
The cases are “flaps 15”, the normal takeoff setting, and “flaps 1”, the high altitude, hot day
setting. The work was conducted in concert with the flight test program to provide insight into
the flight test results by providing complete flowfield details not available from the flight test.
The computational models used 1750 panels for “flaps 1” and 2900 panels for “flaps 15.” The
modeling used to simulate this flowfield illustrates typical idealizations employed when applying
panels methods to actual aircraft. Although typical, it is one of the most geometrically
complicated examples ever published.
Figure 5-28 shows the wing leading edge and nacelle. The inboard Krueger flap was
actually modeled as a doublet of zero thickness. The position was adjusted slightly to allow the
doublet sheet to provide a simple matching of the trailing edge of the Krueger and the leading
edge of the wing. These types of slight adjustments to keep panel schemes relatively simple are
commonly used. The outboard leading and trailing edge flap geometries were also modified for
use in this inviscid simulation. Figure 5-29a) shows the actual and computational “flaps 1”
geometry. In this case the airfoil was modeled as a single element airfoil. The “flaps 15” trailing
edge comparison between the actual and computational geometry is shown in Fig. 5-29b). The
triple slotted flap was modeled as a single element flap. At this setting the gap between the
forward vane and main flap is closed, and the gap between the main and aft flap is very small.
Figure 5.28. Inboard wing leading edge and nacelle details (Ref. xxix).
2/6/2016
5-32 Applied Computational Aerodynamics
a) Comparison of actual and computational wing geometry for the flaps 1 case (Ref. xxix).
b) Actual and computational trailing edge geometry for the flaps 15 case (Ref. xxix).
Figure 5.29. Examples of computational modeling for a real application.
Several three-dimensional modeling considerations also required attention. In the “flaps 1”
case shown in Fig. 5.30, spanwise discontinuities included the end of the outboard leading edge
slat and trailing edge discontinuities at the back of the nacelle installation (called the thrust gate)
between the inboard and outboard flaps. At the outboard leading edge the edges of the slat and
wing were paneled to prevent leakage. A 0.1 inch gap was left between these surfaces. At the
trailing edge discontinuity a wake was included to model a continuous trailing edge from which
a trailing vortex sheet could be shed.
2/6/2016
Classical Linear Theory Computational Aerodynamics 5-33
Figure 5.30. Spanwise discontinuity details requiring modeling for flaps 1 case (Ref. xxix).
Similar considerations are required for the “flaps 15.” Here, special care was taken to make
sure that the configuration was closed, and contained no holes in the surface at the ends of the
flap segments.
Another consideration is the nacelle model. This requires the specification of the inlet flow
at the engine face, a model of the strut wake, and both the outer bypass air plume and the
primary wake from the inner hot gas jet. Figure 5.31 shows the details.
Figure 5.31 Nacelle model illustrating the application of boundary conditions (Ref. xxix).
2/6/2016
5-34 Applied Computational Aerodynamics
Complete details of the model are contained in Ref. xxix. With the model complete, the
solution was obtained. The spanwise distribution of airfoil section lift coefficients is presented in
Figure 5-32. The first part of the figure shows the results for the “flaps 1” case, and the second
part of the figure presents the “flaps 15” case. In both cases the jig shape and flight shape
including aeroelastic deformation are included. This is another consideration in making a proper
aerodynamic simulation. In both cases the shape including the deformation under load shows
much better agreement with flight and wind tunnel data. Notice the loss of lift on the wing at the
nacelle station, and the decrease in lift outboard of the trailing edge flap location.
a) flaps 1 case
b) flaps 15 case
Figure 5.32. Spanwise distribution of lift coefficient on the Boeing 737-300 (Ref. xxix).
2/6/2016
Classical Linear Theory Computational Aerodynamics 5-35
Figure 5-33 presents the change in section lift coefficient with angle of attack at several span
stations. The agreement between PAN AIR and flight test is better for the “flaps 1” case. Viscous
effects are becoming important for the “flaps 15” case.
a) flaps 1 case
b) flaps 15 case
Figure 5.33. Comparison of section lift coefficient change with angle of attack (Ref. xxix)
2/6/2016
5-36 Applied Computational Aerodynamics
Figure 5-34 completes this example by presenting the comparison of pressure distributions
for the two cases at four spanwise stations. The “flaps 1” case agreement is generally good.
Calculations are presented for both the actual angle of attack, and the angle of attack that
matches the lift coefficient. Matching lift coefficient instead of angle of attack is a common
practice in computational aerodynamics. Considering the simplifications made to the geometry
and the absence of the simulation of viscous effects the agreement is very good. The “flaps 15”
case starts to show the problems that arise from these simplifications. This is a good example of
the use of a panel method. It illustrates almost all of the considerations that must be addressed in
actual applications.
a) flaps 1 case
b) flaps 15 case
Figure 5.34. Comparison of pressure distributions between flight and computations
for the 737-300, solid line is PAN AIR at flight lift, dashed line is PAN AIR at flight
angle of attack (Ref. xxix).
2/6/2016
Classical Linear Theory Computational Aerodynamics 5-37
5.2.6 Using Panel Methods
Common sense rules for panels
• Vary the size of panels smoothly
• Concentrate panels where the flowfield and/or geometry is changing rapidly
• Don’t spend more money and time (i.e., numbers of panels) than required
Panel placement and variation of panel size affect the quality of the solution. However,
extreme sensitivity of the solution to the panel layout is an indication of an improperly posed
problem. If this happens, the user should investigate the problem thoroughly.
Panel methods are an aid to the aerodynamicist. You must use the results as a guide to help
you develop your own judgment. Remember that the panel method solution is an approximation
of the real life problem; an idealized representation of the flowfield. An understanding of
aerodynamics that provides an intuitive expectation of the types of results that may be obtained,
and an appreciation of how to relate your idealization to the real flow, is required to get the most
from the methods. This insight requires experience and study.
What a Panel Method Can and Can't Do
1. Panel methods are inviscid solutions. You will not capture viscous effects except via
user “modeling” by changing the geometry.
2. Solutions are invalid as soon as the flow develops local supersonic zones
[i.e., Cp < Cpcrit]. For two-dimensional isentropic flow, the exact value of Cp for
critical flow is:
C pcrit
1
1
2
2 1 2 M
1
M 2 1
2
(5.32)
5.2.7 Advanced panel methods: What is a “Higher Order” Panel Method?
So-called “higher-order” panel methods use singularity distributions that are not constant
over the panel, and may also use panels that are non-planar. Higher-order methods were actually
found to be crucial in obtaining accurate solutions for the Prandtl-Glauert Equation at supersonic
speeds. At supersonic speeds, the Prandtl-Glauert equation is actually a wave equation
(hyperbolic), and requires much more accurate numerical solution than the subsonic case to
avoid “noisy” pressure distributions as the solution (Magnus and Eptonxxx). However, subsonic
higher-order panel methods, although not as important as the supersonic flow case, have been
studied in some detail. In theory, good results can be obtained using far fewer panels with
2/6/2016
5-38 Applied Computational Aerodynamics
higher-order methods. In practice the need to resolve geometric details often leads to the need to
use small panels anyway, and all the advantages of higher-order panelling methods are not
necessarily obtained. Nevertheless, since a higher-order panel method may also be a relatively
new program taking advantage of many years of experience, the higher-order code may still be a
good candidate for use.
5.2.8 Today’s standard programs: a brief survey
Panel methods are widely used in the aircraft industry, and have been for a long time.
Comparisons between various panel codes have been made (e.g., Margason, et al.xxxi), and in
general, all the new professionally-developed codes can be made to work well (recall the
attention to detail required illustrated above). The selection of a specific code will likely be based
on non-technical considerations, such as cost or availability. One of the newest panel codes is
known as PMARC,xxxii for Panel Method Ames Research Center, and has received a great deal
of development effort. We provide a brief description of the codes a new aerodynamicist will
most likely encounter, either at work or reading the literature. Tables 5-1 through 5-3 are based
on the summary by Magnus and Epton,xxx with slight updating, and provide specific references.
PAN AIR - Boeing-developed code, funded by a variety of government agencies.
This code provides total flexibility, i.e. it is really an integral equation solver and not an
aerodynamicist’s tool per se. It is a higher-order panel method, and can handle both subsonic
and supersonic flow. It is relatively expensive and difficult to run (a PAN AIR user would
take months to train, and it would probably become his primary job).
To effectively use the code good pre- and post- processing systems must be available.
Although Boeing has these systems in place, they were internally developed and are not
available outside the company.
VSAERO - AMI developed (Analytical Mechanics Inc., Frank Dvorak and Brian Maskew).
This code was originally a low-order method, but has been extended to include variations of
the singularity strength over a panel, and has now been described as “multi-order.”xxviii It is
for subsonic flow only. It handles general geometries, and includes options to treat viscous
effects and vortex flows. Originally developed for NASA, the code has been much further
developed by AMI as a commercial product (they also have a plotting package and other
supporting software available for purchase) This code requires considerable user training.
Support from AMI is available, but none of the codes are priced for student use. Typical
development enhancements of the code are described by Nathman.xxxiii
2/6/2016
Classical Linear Theory Computational Aerodynamics 5-39
The public domain version of this code was obtained by several groups that worked on the
design of the America’s Cup Yacht competitors in the mid-1980s. The code was used for hull
and keel design. One of the modifications that was made for this application was the addition
of the free surface representing the air-water interface (recall that the free surface problem
means that the surface displacement is unknown, and the boundary condition is that a
constant pressure exists at the interface).
Versions of the “Hess Code” - further developments of the research team at Douglas, now
Boeing, McDonnell Douglas developed numerous versions under various government contracts,
and it seems to be available mainly at Navy facilities.
Woodward: An old panel method that is sometimes encountered is the code known as the
“Woodward” or “Woodward-Carmichael” code. Woodward's first methods were developed
while he was at Boeing, and were supported by NASA Ames, primarily for the US Supersonic
Transport program (which was an important national effort in the 1960s). Subsequently,
Woodward went into business and continued to develop codes. USSAERO treats both
supersonic and subsonic flow, and a version that combines a number of features of each code, as
well as additional design options is also available, and known as “Woodward 12” or W12SC3.
PMARC -This is the newest panel method code, and was developed at NASA Ames to provide
an extremely flexible method to simulate a wide range of very general geometries. An example is
the simulation of high lift systems and jet exhausts for VSTOL aircraft. The code is a lowerorder panel method, and can simulate unsteady as well as steady flow. The wake position can be
obtained as part of the solution. It has been used for underwater applications as well as for
aircraft.
The history of panel methods is illustrated in the following tables. Table 5.1 summarizes
some of the key early methods that were developed. (W12SC3 is included because it was a
valuable combination of two early codes,xxxiv providing significant new design capability,
particularly at supersonic speeds; despite the title of the report, W12SC3 can be run at subsonic
speeds.) Table 5.2 reviews the extremely active era of the development of advanced panel
methods. Finally, Table 5.3 provides details on the current production codes likely to be used on
current aerodynamic design and analysis projects. Panels methods can also treat unsteady flows,
with a recent example being the developments made by van Zyl.xxxv
Source code and PC executable versions of the PAN AIR and Woodward codes are
available for a low price, together with a collection of other programs aerodynamic analysis and
design programs, from Public Domain Aeronautical Software.xxxvi
2/6/2016
5-40 Applied Computational Aerodynamics
Table 5.1 Comparison of Some Major Panel Method Programs: Early Codes
Originator and
Method Name
Hess and
Smithxxxvii
(Douglas)
Rubbertxxxviii
(vortex lattice)
Woodwardxxxix
(Woodward I)
Rubbert and
Saarisxl
(Boeing A-230)
Hess Ixli
Year
1962
Panel
Geometry
flat
Source
Type
constant
Doublet
Type
none
Boundary
Conditions
Specificaton of
normal flow
1964
flat
none
constant
normal flow
1967
flat
constant
linear
normal flow
1968
flat
constant
constant
normal flow
1972
flat
constant
linear
normal flow
USSAEROxlii
(Woodward II)
1973
flat
W12SC3xxxiv
(Grumman)
1983
flat
Restrictions
Comments
non-lifting
wings and
bodies only
planar wings
only
wings must be
planar
nearly constant
panel density
wings and
bodies only
subsonic
and
supersonic,
analysis
only
combines
Woodward
I & II
features
mixed design
and analysis
Table 5.2 Comparison of Some Major Panel Method Programs: Advanced Methods
Originator
and
Method
Name
Roberts
and
Rundlexliii
Mercer,
Weber and
Lesfordxliv
Year
Panel
Geometry
Source
Type
Doublet
Type
Boundary
Conditions
1973
paraboloidal
quadratic
quadratic
normal
flow
1973
flat
none
Smooth,
cubic,
quadratic
Morino
and Kuoxlv
(SOUSSA)
Johnson
and
Rubbertxlvi
Ehlers and
Rubbertxlvii
(Mach line
paneling)
Ehlers et
al.xlviii
(PAN AIR
pilot code)
1974
continuous,
hyperboloidal
constant
constant
Normal
flow in
least
squares
sense
potential
1975
paraboloidal
linear
quadratic
normal
flow
1976
flat
linear
continuous
quadratic
normal
flow
1977
continuous
piecewise flat
linear
continuous
quadratic
arbitrary
in ,
2/6/2016
Restrictions
planar wings
Comments
Numerical
integrations, very
expensive
Subsonic/supersonic,
cubic spanwise,
quadratic chordwise
no thin
configurations
unsteady
Planar wings,
special
paneling
supersonic flow
subsonic and
supersonic
Classical Linear Theory Computational Aerodynamics 5-41
Table 5.3 Comparison of Major Panel Method Programs: Production Codes
Originator and
Method Name
MCAIRxlix
(MacDonnell)
PAN AIRxxx
(Boeing)
Year
Panel
Geometry
Source
Type
Boundary
Conditions
constant
Doublet
Type
quadratic
1980
flat
1980
continuous
linear
continuous
quadratic
arbitrary in
,
Subsonic and
supersonic
linear
quadratic
normal
flow
Exterior
and interior
normal
flow
subsonic
Hess IIl
(Douglas)
VSAEROli
(AMI)
1981
continuous
piecewise
flat
parabolic
1981
flat
constant
constant
QUADPANlii
(Lockheed)
PMARCxxxii
(NASA Ames)
1981
flat
constant
constant
1988
flat
constant
constant
Restrictions
Comments
Design option
Unsteady,wake
rollup
5.3 Vortex Lattice Methods
Vortex Lattice Methods (vlm) are similar to panel methods but easier to use and capable of
providing remarkable insight into wing aerodynamics and component interaction. They were
among the earliest methods utilizing computers to actually assist aerodynamicists in estimating
aircraft aerodynamics. Vortex lattice methods are based on solutions to Laplace’s Equation, and
are subject to the same basic theoretical restrictions that apply to panel methods.
As a comparison, most vortex lattice methods are:
Similar to Panel methods:
• singularities are placed on a surface
• the no flow-through condition is satisfied at a number of control points
• a system of linear algebraic equations is solved to determine singularity strengths
Different from Panel methods:
• Oriented toward lifting effects, and classical formulations ignore thickness
• Boundary conditions (BCs) are applied on a mean surface, not the actual surface
(not an exact solution of Laplace’s equation over a body, but embodies some
additional approximations, i.e., together with the first item, we findCp,
not Cpupper and Cplower)
• Singularities are not distributed over the entire surface
• Oriented toward combinations of thin lifting surfaces
(recall panel methods had no limitations on thickness).
Vortex lattice methods were first formulated in the late 1930s, and the method includes wingtip vortex effects through the use of a trailing vortex filament system. It was first called a
“Vortex Lattice” in 1943 by Faulkner. The concept is extremely simple, but because of its purely
2/6/2016
5-42 Applied Computational Aerodynamics
numerical approach (i.e., no answers are available at all without finding the numerical solution of
a matrix too large for routine hand calculation) practical applications awaited sufficient
development of computers—the early 1960s saw widespread adoption of the method. A
workshop was devoted to these methods at NASA in the mid 1970s.liii A nearly universal
standard for vortex lattice predictions was established by a code developed at NASA Langley,
whose authors include Margason and Lamarliv, Lamar and Gloss,lv and Lamar and Herbert.lvi,lvii It
is generally known as the “Lamar Vortex Lattice Method”. Each new version had considerably
more capability than the previous version. The “final” development in this series is designated
VLM4.997. The original codes could handle two lifting surfaces, while VLM4.997 can handle
four. Many other people have written vortex lattice method codes. The current methods that are
widely used are the code by Drela and Youngren, AVL,lviii and Tornado, a MATLAB code
developed by Tomas Melin at KTH in Sweden.lix VORLAX,lx as part of the HASC codelxi is
also widely used. AMI, the authors of the VSAERO panel method described above have also
released a vortex lattice code, VLAERO.lxii The vlm method is simple enough that many
students have written their own codes, which are easily executed on current personal computers.
Noteworthy variations on the basic method have been developed by Lan lxiii (Quasi-Vortex
Lattice Method), and Mooklxiv and co-workers. Mook developed vortex lattice class methods that
treat flowfields that contain leading edge vortex-type separation and also handle general
unsteady motions. The book by Katz and Plotkinv contains another variation, using vortex rings,
and includes a FORTRAN code. Kay wrote a codelxv (JKayVLM) using the method of Katz and
Plotkin to estimate stability derivatives and that code is also readily available.
To understand the method, a number of basic concepts must be reviewed. Then we describe
one implementation of the vlm method, and use it to obtain insights into wing and wing-canard
aerodynamics. Naturally, the method is based on the idea of a vortex singularity as the solution
of Laplace’s equation. A good description of the basic theory for vortices in inviscid flow and
thin wing analysis is contained in Karamcheti,viii pp. 494-496, 499-500, and 518-534 and has
been reviewed in Chapter 4. A good general description of the vortex lattice method is given by
Bertin and Cummings.i After some illustrations of the results from vlm methods, an example of a
vortex lattice method used in a design mode is presented, where the camber line required to
produce a specified loading is found.
2/6/2016
Classical Linear Theory Computational Aerodynamics 5-43
5.3.1 Boundary conditions on the mean surface and the pressure relation
An important difference between vortex lattice methods and panel methods is the way in
which the boundary conditions are handled. Typically, the vortex lattice method uses an
approximate boundary condition treatment; this boundary condition can also be used in other
circumstances to good advantage. This is a good “trick” applied aerodynamicists should know
and understand, and that is why it is covered in detail here. In general, this approach results in
the so-called “thin airfoil boundary condition,” and arises by linearizing and transferring the
boundary condition from the actual surface to a flat mean “reference” surface, that is typically a
constant coordinate surface. Consistent with the boundary condition simplification, a simplified
relation between the pressure and velocity is also possible. The simplification in the boundary
condition and pressure-velocity relation provides a basis for treating the problem as a
superposition of the lift and thickness contributions to the aerodynamic results. Karamcheti viii
provides an excellent discussion of this approach.
To understand the thin airfoil theory boundary condition treatment, we provide an example in
two dimensions. Recall (from Eqn. 2-54) that the exact surface boundary condition for steady
inviscid flow is:
Vn 0
(5.33)
on F(x, y) 0 y f (x) . The unit normal vector is n F(x, y) / F(x, y) and the velocity
field is defined using the notation defined in Fig. 5.35.
y
V•
V•sin
x
V•cos
Figure 5.35. Basic coordinate system for boundary condition analysis.
2/6/2016
5-44 Applied Computational Aerodynamics
Define the velocity components of V as:
V V
q(x, y)
123
(5.34)
a disturbance velocity
where q is a disturbance velocity with components u and v. If we assume irrotational flow, then
these components are described in terms of a scalar potential function, u = x and v = y. The
total velocity V then becomes (in terms of velocity components):
uTOT V cos u(x, y)
vTOT V sin v(x, y)
(5.35)
and we can write out the boundary condition as:
F
F
V n (uTOTi vTOT j)
i
j 0
x
y
or
V
F
F
V sin v(x, y) 0
x
y
cos u(x, y)
(5.36)
(5.37)
on F(x,y) = 0, and recalling the relationship between F and f given below Eqn. (5.33):
F
df (x)
y f (x)
x x
dx
.
F
y f (x) 1
y y
(5.38)
Substituting for F in Eq.(5.37) we have:
V cos u dx V sin v 0
(5.39)
v V cos u
(5.40)
df
which, solving for v, is:
df
V sin
dx
on y = f(x). Note that v is defined in terms of the unknown u. Thus Eq. (5.40) is a nonlinear
boundary condition and further analysis is needed to obtain a useful relation.*
Linearized form of the boundary condition
The relation given above by Eq.(5.40) is exact. It has been derived as the starting point for
the derivation of useful relations when the body (which is assumed to be a thin surface at a small
angle of attack) induces disturbances to the freestream velocity that are small in comparison to
*
Observe that even when the flowfield model is defined by a linear partial differential equation, an assumption
which we have not yet made, the boundary condition can make the problem nonlinear.
2/6/2016
Classical Linear Theory Computational Aerodynamics 5-45
the freestream velocity. Thus we assume: u << V∞, v << V∞, and ∂F/∂x < ∂F/∂y. Note that this
introduces a bias in the coordinate system to simplify the analysis, a typical consequence of
introducing simplifying assumptions. Consistent with this assumption, the components of the
freestream velocity are (remembering that is in radians and small):
V cos V
V sin V
(5.41)
and the expression for v in Eq.(5.40) becomes:
v V u
df
V
dx
.
(5.42)
Dividing by V∞,
v
u df
1
V V dx
(5.43)
the linearized boundary condition is obtained by neglecting u/V∞ compared with unity
(consistent with the previous approximations). With this assumption, the linearized boundary
condition becomes:
v df
V dx
on y f (x) .
(5.44)
This form of the boundary condition is not valid if the flow disturbance is large compared to
the freestream velocity {for aerodynamically streamlined shapes this is usually valid everywhere
except at the leading edge of the airfoil, where a stagnation point exists (u = -V∞) and the slope
is infinite (df/dx = ∞)}. In practice, a local violation of this assumption leads to a local error. So,
if the details of the flow at the leading edge are not important to the analysis, which surprisingly
is often the case at low angles of attack, the linearized boundary condition can be used.
Transfer of the boundary condition
Although Eqn. (5.44) is linear, it is hard to apply because it is not applied on a coordinate
line.* We now use a further approximation of this relation to get the useful form of the linearized
boundary condition. Using a Taylor series expansion of the v component of velocity about the
coordinate axis we obtain the v velocity on the surface:
*
The simplification introduced by applying boundary conditions on constant coordinate surfaces justifies the use of
rather elaborate transformations, which will be discussed in more detail in Chap. 7, Geometry and Grids: Major
Considerations in Using Computational Aerodynamics.
2/6/2016
5-46 Applied Computational Aerodynamics
v{x, y f (x)} v(x,0) f (x)
v
... .
y y0
(5.45)
For the thin surfaces under consideration, f(x) is small, and because the disturbances are assumed
small, ∂v/∂y is also small. For example, assume that v and ∂v/∂y are the same size, equal to 0.1,
and df/dy is also about 0.1. The relation between v on the airfoil surface and the axis is:
v{x, y f (x)} (0.1) (0.1)(0.1) 0.1 0.01
{ .
(5.46)
neglect
Neglecting the second term, we assume:
(5.47)
v{x, f (x)} v(x, 0) .
We now apply both the upper and lower surface boundary conditions on the axis y = 0, and
distinguish between the upper and lower surface shapes by using:
f fu
f fl
on the upper surface
.
on the lower surface
(5.48)
Using Eq. (5.48), we write the upper and lower surface boundary conditions as:
v x, 0
V
up
df
u ,
dx
v x, 0
V
low
dfl
.
dx
(5.49)
These are the linearized and transferred boundary conditions. Frequently, these boundary
conditions result in a surprisingly good approximation to the flowfield, even in transonic and
supersonic flow.
Decomposition of boundary conditions to camber/thickness/alpha
Further simplification and insight can be gained by considering the airfoils in terms of the
combination of thickness and camber, a natural point of view. We thus write the upper and lower
surface shapes in terms of camber, fc, and thickness, ft, as:
fu fc ft
fl fc ft
and the general problem is then divided into the sum of three parts as shown in Fig. 5.36.
2/6/2016
(5.50)
Classical Linear Theory Computational Aerodynamics 5-47
=
+
+
General
Thickness
Flat plate
Camber
airfoil
at = 0°
at
at = 0°
at
Figure 5.36. Decomposition of a general shape at incidence.
The decomposition of the problem is somewhat arbitrary, since linearity allows for any
decomposition to be used. Camber could also be considered to include angle of attack effects
using the boundary condition relations given above. The aerodynamicist must keep track of
details for a particular problem. To proceed further, we make use of the basic vortex lattice
method assumption: the flowfield is governed by a linear partial differential equation (Laplace’s
equation, allowing for superposition of solutions). Superposition allows us to solve the problem
in pieces and add up the contributions from the various parts of the problem. This results in the
final form of the thin airfoil theory boundary conditions, substituting Eq. (5.50) into Eq. (5.49):
v x, 0
V
v x, 0
V
up
(5.51)
.
low
dfc dft
dx dx
dfc dft
dx dx
The problem can be solved for the various contributions and the contributions are added together
to obtain the complete solution. If thickness is neglected the boundary conditions are the same
for the upper and lower surface.
Thin airfoil theory pressure relation
Consistent with the linearization of the boundary conditions, a useful relation between the
pressure and velocity can also be obtained. For incompressible flows, the exact relation between
the pressure coefficient and velocity is:
V
Cp 1
V
2
(5.52)
Assuming two-dimensional flow for this example, we express the velocity considering
disturbances to the freestream velocity using the approximations discussed above:
V 2 V cos u V sin v V u V v
2
Expanding and dividing by V2 we get:
2/6/2016
2
2
2
(5.53)
5-48 Applied Computational Aerodynamics
V2
u u2
v v2
2
.
1 2 2 2
V2
V V
V V2
(5.54)
Substituting into the Cp relation, Eqn. (5-52), we get:
u u2
v v2
CP 1 1 2 2 2 2
V V
V V2
1 1 2
2
(5.55)
2
u u
v v
2 2 2
V V
V V2
and if, u/V∞ and v/V∞ are << 1, then the last four terms can be neglected in comparison with
the third term. The final result is:
C p 2
u
.
V
(5.56)
This is the linearized or “thin airfoil theory pressure formula”. From experience gained
comparing various computational results, we have found that this formula is a slightly more
severe restriction on the accuracy of the solution than the linearized boundary condition.
Equation (5.56) shows that under the small disturbance approximation, the pressure is a linear
function of u, and we can add the Cp contribution from thickness, camber, and angle of attack by
superposition. A similar derivation can be used to show that Eq. (5.56) is also valid for
compressible flow up to moderate supersonic speeds.
Cp due to camber/alpha (thickness effects cancel!)
Next, we make use of the result in Eq. (5.56) to obtain a formula for the load distribution on
the wing, which is the difference between the pressure on the top and bottom surfaces:
(5.57)
C p C pl C pu .
Using superposition, the pressures can be obtained as the contributions from wing thickness,
camber, and angle of attack effects:
C pl C pThickness C pCamber C pAngle of attack
C pu C pThickness C pCamber C p
so that:
2/6/2016
Angle of attack
(5.58)
Classical Linear Theory Computational Aerodynamics 5-49
C p C pThickness C pCamber C pAngle of attack
2 C
C pThickness C pCamber C pAngle of attack .
pCamber
C pAngle of attack
(5.59)
Equation (5.59) demonstrates that for cases where the linearized pressure coefficient relation is
valid, thickness does not contribute to lift to first order in the velocity disturbance.
The importance of this analysis is that we have shown:
1. how the lifting effects can be obtained without considering thickness, and
2. that the cambered surface boundary conditions can be applied on a flat coordinate
surface, resulting in an easy to apply boundary condition.
The principles demonstrated here for transfer and linearization of boundary conditions can be
applied in a variety of situations other than the application to vortex lattice methods. Often this
idea can be used to handle complicated geometries that cannot easily be treated exactly.
The analysis shown here produces an entirely consistent problem formulation. This includes
the linearization of the boundary condition, the transfer of the boundary condition, and the
approximation between velocity and pressure. All of the approximations are consistent with each
other, and improving one of these approximations without improving them all in a consistent
manner may actually lead to worse results. Sometimes you can make agreement with data better,
sometimes it may get worse. You have to be careful when trying to improve theory on an ad hoc
basis.
To examine the use of these ideas we present a two-dimensional example. For the numerical
calculation the airfoil is divided into a number of equal length panels. A vortex is placed at the
quarter-chord point of each panel and the no-flow-through boundary condition is satisfied at the
three-quarter chord point of the individual panel. This can be shown to produce exact thin airfoil
theory for a small number of panels, and is known as the “1/4 – 3/4 rule”. The example illustrates
the accuracy of the methods described above. In Fig. 5.37, we compare the results obtained for a
5% circular arc camber.* Three solutions are presented. The curve labeled linear theory uses
classical analytical thin airfoil theory with results obtained satisfying the boundary condition on
the mean surface. This is compared with numerical results for the case where the boundary
condition is applied exactly on the camber line, and the result obtained applying the boundary
*
A relatively large camber for a practical airfoil, the NACA 4412 example we used above illustrating panels
methods was an extreme case with 4% camber.
2/6/2016
5-50 Applied Computational Aerodynamics
condition on the mean surface using the approximate method described above. The difference
between placing the vortex on the actual camber surface and satisfying the boundary condition
on the actual surface, and the more approximate traditional approach of locating the vortex and
control point on the mean surface is extremely small.
C
Cp
bc's on
on camber
camber line
line
p bc's
C
bc's
on
axis
Cpp
C
Cp
linear theory
theory
p linear
0.90
0.80
0.70
Cp
0.60
0.50
0.40
5% Circular arc camber line
=0°
40 panels
0.30
0.20
0.10
0.0
0.2
0.4
x/c
0.6
0.8
1.0
Figure 5.37. Comparison in 2D of the 1/4-3/4 rule for vortex-control point locations with
linear theory, and including a comparison between placing the vortex and
control point on the camber line or on the axis.
5.3.2 The Classical Vortex Lattice Method
There are many different vortex lattice schemes. In this section we describe the “classical”
implementation, in which a horseshoe vortex is placed on each panel.* Knowing that vortices can
represent lift from our airfoil analysis, this approach places a vortex filament at the 1/4 chord
location of a “panel” and then the boundary condition is satisfied at the 3/4 chord point on the
panel, the so-called “1/4 - 3/4 rule.” This was the approach used above to obtain the results
*
Alternately, methods have been developed that employ vortex rings around each panel. The panel at the trailing
edge still has to use a vortex that extends to downstream infinity to model the wake. A curious property of vortex
rings is that they are equivalent to a constant strength doublet panel, as pointed out by Paul Rubbert in a 1978 AIAA
short course on Applied Computational Aerodynamics.
2/6/2016
Classical Linear Theory Computational Aerodynamics 5-51
shown in Fig. 5.37. This is illustrated in Fig. 5.38, where the “horseshoe vortex” is shown on
each panel. Each horseshoe vortex consists of the “bound vortex” attached to the panel, and two
trailing vortex legs that attach to the end of the bound vortex and extend to downstream infinity
(since a vortex cannot end in a fluid). Using this approach, we proceed as follows:
1. Divide the planform up into a lattice of quadrilateral panels, and put a horseshoe vortex on
each panel.
2. Place the bound vortex of the horseshoe vortex on the 1/4 chord element line of each panel.
3. Place the control point on the 3/4 chord point of each panel at the midpoint in the spanwise
direction (sometimes the lateral panel centroid location is used).
4. Assume a flat wake in the usual classical method.
5. Determine the strengths of each n required to satisfy the boundary conditions by solving a
system of linear equations. This system comes from writing down the sum of all the
horseshoe vortex induced velocity contributions at each control point, and then using that
velocity in the equation required to satisfy the no flow-through condition. This results in a
system for the unknown values of the n’s.
y
bound vortices
control points
X
X
X
X
X
X
X
n
n
X
X
x
Trailing vortices extend to infinity
Figure 5.38. The horseshoe vortex layout for the classical vortex lattice method.
Note that the lift is on the bound vortices. To understand why, consider the vector statement
of the Kutta-Joukowski Theorem, F V . Assuming the freestream velocity is the primary
contributor to the velocity, the trailing vortices are parallel to the velocity vector and hence the
force on the trailing vortices are zero (recall that if vectors are parallel, the cross product is zero).
2/6/2016
5-52 Applied Computational Aerodynamics
More accurate methods find the wake deformation required to eliminate the force in the presence
of the complete induced flowfield.
As in the case of panels methods, the algebra required to obtain the influence coefficients
connecting the velocities induced at a specific location by each horseshoe vortex is lengthy. The
velocity induced by a vortex filament is given by the Biot-Savart Law, see Section 4.8.3 above.
Each horseshoe vortex makes a contribution with a single value of . Bertin and Cummingsi
contains a detailed derivation. To illustrate the essence of the method, we consider the simple
planar surface case, without dihedral. Using the basic boundary condition relation given in Eq.
(5.51) and realizing that in 3D the downwash velocity is w, the boundary condition is:
w dfc
a
V dx
(5.60)
Now, the downwash w at a point m, due to a horseshoe vortex, n, can be written as:
(5.61)
wm Cm,n n .
where Cm,n is an influence coefficient that is based on the Biot-Savart Law and the geometric
distance between point m and the horseshoe vortex n. The next step is to sum the induced
velocities from all the horseshoe vortices at a point m, and use that velocity in the boundary
condition, Eq. (5.60),
df
wm Cm,nk n V c .
dx
m
n1
2N
(5.62)
where there are N horseshoe vortices on each side of the wing, resulting in a total of 2N
horseshoe vortices representing the wing. Thus we have the following equation that satisfies the
boundary conditions and can be used to relate the circulation distribution and the wing camber
and angle of attack:
2N
C
n1
m,nk
n dfc
V dx
m
m 1,...,2N .
(5.63)
Equation (5.63) contains two cases:
or
2/6/2016
1. The Analysis Problem. Given camber slopes and, solve for the circulation strengths,
/V∞) [ a system of 2N simultaneous linear equations].
Classical Linear Theory Computational Aerodynamics 5-53
2. The Design Problem. Given n/V∞), which corresponds to a specified surface
loading, we want to find the camber and required to generate this loading (only
requires simple algebra, no system of equations must be solved).
Notice that the way dfc/dx and are combined illustrates that the division between camber,
angle of attack and wing twist is arbitrary (twist can be considered a separate part of the camber
distribution, and is useful for wing design). However, care must be taken in keeping the
bookkeeping straight.
A reduction in the size of the problem is available in many cases. If the geometry is
symmetrical and the camber and twist are also symmetrical, then n is the same on each side of
the planform (but not the influence coefficient). Therefore, we only need to solve for N ’s, not
2N. This is also true if ground effects are desired, where the image of a vortex placed
symmetrically below the ground plane can be included in the influence coefficient matrix
without adding additional unknowns, as shown in Katz and Plotkinv. The system of equations for
the case of planform symmetry becomes:
N
C
n1
m,nkleft
df
Cm,nkright n c
m
dx
V
m 1,..., N .
(5.64)
Doing this seems easy—why not just program it up ourselves? You can, but most of the work is
taken up by:
A. Automatic layout of panels for arbitrary geometry. As an example, when considering
multiple lifting surfaces, the horseshoe vortices on each surface must “line up”. The
downstream leg of a horseshoe vortex cannot pass through the control point of
another panel.
and
B. Convertingn to the aerodynamics values of interest, CL, Cm, etc., and the spanload,
is tedious for arbitrary configurations.
Nevertheless, many people, including lots of students have written vlm codes. The method is
widely used in industry and government for aerodynamic estimates for conceptual and
preliminary design predictions. It provides good insight into the aerodynamics of wings,
including interactions between lifting surfaces.
Typical analysis uses (in a design environment) include
• Predicting the configuration neutral point during initial configuration layout, and
studying the effects of wing placement and canard and/or tail size and location.
• Finding the induced drag, CDi, from the spanload in conjunction with farfield methods.
2/6/2016
5-54 Applied Computational Aerodynamics
• With care, estimating control and device deflection effectiveness (estimates where
viscous effects may be important require calibration. Some examples are shown in the
next section. For example, take 60% of the inviscid value to account for viscous losses,
and also realize that a deflection of f = 20 - 25° is about the maximum useful device
deflection in practice).
• Investigating the aerodynamics of interacting surfaces.
• Finding the lift curve slope, CL, approach angle of attack, etc.
Typical design applications include:
• Initial estimates of twist to obtain a desired spanload, or root bending moment.
• Starting point for finding a camber distribution in purely subsonic cases.
Before examining how well the method works, two special cases require comments. The
first case arises when a control point is in line with the projection of one of the finite length
vortex segments. This problem occurs when the projection of a swept bound vortex segment
from one side of the wing intersects a control point on the other side. This happens surprisingly
frequently. The velocity induced by this vortex is zero, but the equation as usually written
degenerates into a singular form, with the denominator going to zero. Thus a special form of the
equation should be used. In practice, when this happens the contribution can be set to zero
without invoking the special form. Figure 5.39 shows how this happens. Using the so-called
Warren 12 planform and 36 vortices on each side of the wing, we see that the projection of the
line of bound vortices on the last row of the left hand side of the planform intersects one of the
control points on the right hand side.
A model problem illustrating this can be constructed for a simple finite length vortex
segment. The velocity induced by this vortex is shown in Fig. 5.40. When the vortex is
approached directly, x/l = 0.5, the velocity is singular for h = 0. However, as soon as you
approach the axis (h = 0) off the end of the segment (x/l > 1.0) the induced velocity is zero. This
illustrates why you can set the induced velocity to zero when this happens.
The second special case that needs to be discussed arises when two or more planforms are
used with this method, which is one of the most powerful applications of the vortex lattice
method. However, care must be taken to make sure that the trailing vortices from the first surface
do not intersect the control points on the second surface. In this case the induced velocity is in
fact infinite, and the method breaks down. Usually this problem is solved by using the same
spanwise distribution of horseshoe vortices on each surface. This aligns the vortex legs, and the
control points are well removed from the trailing vortices of the forward surfaces.
2/6/2016
Classical Linear Theory Computational Aerodynamics 5-55
-0.50
Warren 12 planform
0.00
example is for 36 horseshoe
vortices on each side, all
vortices not shown for
clarity
projection of bound
vortices on this row
intersect control point
on other side
of planform
0.50
horseshoe vortex
1.00
control point
1.50
2.00
2.50
trailing legs extend to infinity
3.00
-2.0
-1.5
-1.0
-0.5
0.0
0.5
1.0
1.5
2.0
Figure 5.39. Example of case requiring special treatment, the intersection of the
projection of a vortex with a control point.
1.00
l
0.80
x
x=0
h
p
x/l
0.5
0.60
Vp
0.40
1.5
0.20
2.0
3.0
0.00
0.0
0.5
1.0
h/l
1.5
2.0
Figure 5.40. Velocity induced by finite straight line section of a vortex.
2/6/2016
5-56 Applied Computational Aerodynamics
5.3.3 Examples of the Use and Accuracy of the vlm Method
How well does the vortex lattice method work? In this section we describe how the method is
normally applied and present several example results obtained using the method. The vortex
lattice layout is clear for most wings and wing-tail or wing-canard configurations. The method
can be used for wing-body cases by simply specifying the projected planform of the entire
configuration as a flat lifting surface made up of a number of straight line segments. The exact
origin of this somewhat surprising approach is unknown, but its success is illustrated in examples
given below.
To get good, consistent, and reliable results using Lamar’s program discussed above some
simple rules for panel layout should be followed (likely equally valid for any vlm method). This
requires that a few common rules of thumb be used in selecting the planform break points: i) the
number of line segments should be minimized, ii) breakpoints should line up streamwise on front
and rear portions of each planform, and should line up between planforms, iii) streamwise tips
should be used, iv) small spanwise distances should be avoided by making edges streamwise if
they are actually highly swept, and v) trailing vortices from forward surfaces cannot hit the
control point of an aft surface. Figure 5-41 illustrates these requirements.
The Warren 12 Test Case
One reference wing case that is a standard used to check the accuracy of vortex lattice codes
is the Warren 12 planform. It provides a check case for the evaluation of any new or modified
vlm code, as well as a check on the panel scheme layout, and is defined, together with the
“official” characteristics from previous calculations, in Fig. 5.42 below. For the Warren 12
results, the reference chord used in the moment calculation is the average chord (slightly
nonstandard, normally the reference chord used is the mean aerodynamic chord) and the moment
reference point is located at the wing apex (which is also nonstandard).
As with all computational aerodynamics methods, vlm should be checked to assess the
convergence characteristics. Figure 5.43 is taken from the original NASA report describing the
Lamar program,liv and shows that the basic force results can be obtained with a relatively small
number of chordwise panels, but requires a farily large number of spanwise rows of panels. The
original program distributed by NASA allowed for a maximum of 200 horseshoe vortices, which
is about what is needed to obtain results that are converged in the number of vortices.
2/6/2016
Classical Linear Theory Computational Aerodynamics 5-57
y
line up spanwise
breaks on a common
break, and make the
edge streamwise
first planform
Model Tips
• start simple
• crude representation
of the planform is all right
• keep centroids of areas
the same: actual planform to
vlm model
Make edges
streamwise
second planform
x
Figure 5.41. Example of a vlm model of an aircraft configuration. Note that one side
of a symmetrical planform is shown.
Figure 5.42. Definition and reference results for the Warren-12 wing.
2/6/2016
5-58 Applied Computational Aerodynamics
Figure 5.43 Convergence of the lift curve slope and stability with increasing
numbers of panels, N s is the number of spanwise panels, N c is the number of
chordwise panels. (from Ref. liv).
Isolated swept wing example
Next, we show how a vlm calculation compares with experimental data for an isolated wing
case.lxvi Here we selected an aspect ratio 10 wing with a quarter chord sweep of 35° and a taper
ratio of 0.5. The airfoil was a 12% thick NACA 65A012 section. The Mach number is low, 0.14,
and the Reynolds number is 6 million for the lift comparison, and 10 million for the pitching
moment comparison. The test was conducted at the NACA Ames Research Center. The results
are given in Fig. 5.44. The agreement for the prediction of lift is given in Fig. 5.44a. We see very
good agreement at low alpha, where the flow is attached. Figure 5.44b compares the pitching
moment variation with the lift coefficient. This is one of the most important considerations in
airplane aerodynamics, and the agreement is excellent until the flow starts to separate at the
wingtip and the wing “pitches up”, a problem with swept wings.
2/6/2016
Classical Linear Theory Computational Aerodynamics 5-59
1.50
data from NACA RM A50K27
AR = 10, c/4 = 35°, = 0.5
M = 0.14, Re = 6 million
1.00
CL
VLMpc calculation
0.50
0.00
-0.50
-10.0
-5.0
0.0
5.0
10.0
Angle of attack, deg.
15.0
20.0
a) lift coefficient
0.08
data from NACA RM A50K27
0.06
Cm
AR = 10, c/4 = 35°, = 0.5
Re = 10 million
0.04
x ref = c/4
0.02
0.00
-0.02
-0.04
VLMpc calculation
-0.06
-0.4
-0.2
0.0
0.2
0.4
CL
0.6
0.8
1.0
1.2
b) pitching moment
Figure 5.44 Comparison of VLMpc with wind tunnel data for an isolated wing.lxvi
2/6/2016
5-60 Applied Computational Aerodynamics
Wing-Body-Tail Example
The comparison of vlm results with wind tunnel data for a wing-body-tail configurationlxvii is
given in Fig. 5.45. Figure 5.45a shows the configuration, and Figs. 5.45b and c compare the
results with the wind tunnel data for the lift and pitching moment coefficients. The effect of the
horizontal tail is included in each figure.
a) the model
1.00
Symbols: Wind Tunnel Data
Lines: VLMpc predictions
0.80
Tail on
0.60
CL
0.40
Tail off
0.20
0.00
data from NASA TN D-13
M = 0.60
-0.20
-2.0°
0.0°
2.0°
4.0°
6.0°
8.0°
10.0°
b) lift
Figure 5.45 Wing Body Tail case
2/6/2016
12.0°
14.0°
Classical Linear Theory Computational Aerodynamics 5-61
1.00
VLMpc
0.80
Tail off
0.60
Wind Tunnel Data
CL
0.40
Tail on
0.20
0.00
-0.20
data from NASA TN D-13
M = 0.60
-0.40
0.05
0.00
-0.05
-0.10
-0.15
-0.20
-0.25
Cm
c) comparison of pitching moment estimate from VLMpc with wind tunnel data
Figure 5.45 Wing Body Tail case Concluded (NASA TN D-13)
Control Surface Deflection Example
The vlm method can also be used to estimate control surface deflection effects. An example is
shown in Fig. 5.46. Because the method is inviscid, and the control device is at the back end of
the surface and subjected to significant viscous effects, the method generally overpredicts the
effectiveness. The case shown is for an NACA 23012 airfoil with a 20% chord plane flap at a
Reynolds number of 8 million.lxviii
2/6/2016
5-62 Applied Computational Aerodynamics
1.4
VLM and Thin Airfoil Theory CL
Experimental Delta CL
1.2
1.0
CL
0.8
0.6
0.4
Flap chord to airfoil chord ratio = 0.20
Reynolds number = 8 million
WT data from NACA R 661
0.2
0.0 0°
10°
20°
30°
flap deflection
40°
50°
Figure 5.46 Control surface deflection effectiveness comparison between
a vlm calculation and wind tunnel data.
Pitch and Roll Damping Estimation Example
The vlm method can also be used to predict the value of the pitch and roll damping coefficients,
C mq and Cl p . These characteristics are important in establishing the stability characteristics of
airplanes, and the method described in Etkinlxix is easily implemented. Figure 5.47 shows a
comparison of the vlm pitch and roll damping results using another vlm method, JKayVLM, for
an F-18-type airplane compared to estimates from DATCOM,lxv which we described previously
in Chap. 2. The case shows reasonably good, but not perfect agreement. More details can be
found in the report by Kay, et al.lxv
Data
VLM
Data
DATCOM
1.00
0.10
0.00
0.00
VLM
DATCOM
-1.00
-2.00
Cm q
Cl p
-0.10
-3.00
-0.20
-4.00
-0.30
-5.00
-0.40
-6.00
-0.50
-7.00
Mach .2
Mach .6
a) pitch damping
Mach .2
Mach .6
b) roll damping
Figure 5.47 VLM Pitch and roll damping result comparison with data and DATCOM.lxv
2/6/2016
Classical Linear Theory Computational Aerodynamics 5-63
Slender lifting body results from Jim Pittmanlxx
To illustrate the capability of the vortex lattice method for bodies that are more fuselage-like
than wing-like, we present the lifting body comparison of the experimental and vlm results
published by Jim Pittman of NASA Langley. Figure 5.48 shows the configuration used. Figure
5.49 provides the results of the vortex lattice method compared with the experimental data. In
this case the camber shape was modeled by specifying camber slopes on the mean surface. The
model used 138 vortex panels. The bars at several angles of attack illustrate the range of
predictions obtained with different panel arrangements. For highly swept wings, leading edge
vortex flow effects are included, as described in Chapter 4. Lamar’s program contains the option
of using the leading edge suction analogylxxi to model these effects.* Remarkably good
agreement with the force and moment data is demonstrated in Fig. 5-49. The nonlinear variation
of lift and moment with angle of attack arises due to the inclusion of the vortex lift effects. The
agreement between data and computation breaks down at higher angles of attack because the
details of the distribution of vortex flow separation are not provided by the leading edge suction
analogy. The drag prediction is also very good. The experimental drag is adjusted by removing
the zero lift drag, which contains the drag due to friction and separation. The resulting drag due
to lift is compared with the vlm estimates. The comparisons are good primarily because this
planform is achieving, essentially, no leading edge suction (see Katz and Plotkin, Ref. v, pp. 107
and 131-133 to review the leading edge suction concept) and hence the drag is simply CD =
CLtan, which is easy to predict, but aerodynamically inefficient.
Figure 5.48. Highly swept lifting body type hypersonic concept (Ref. lxx).
*
The leading edge suction analogy is the empirical observation by Eddie Polhamus, after examining experimental
data, that the magnitude of the vortex lift is approximately equal to the value of the leading edge suction for attached
flow, but rotated 90°.
2/6/2016
5-64 Applied Computational Aerodynamics
Figure 5.49. Comparison of CL, Cm, and CD predictions with data (Ref. lxx).
Non-planar results from Kalman, Rodden, and Giesinglxxii
All of the examples presented above considered essentially planar lifting surface cases. The
vortex lattice method can also be used for highly non-planar analysis, and the example cases
used at Douglas Aircraft Company in a classic paperlxxii have been selected to illustrate the
capability. Several of the cases were re-computed using the JKayVLM code,lxv and provide an
interesting comparison with the original results from Douglas.
Figure 5.50 provides an example of the results obtained for an extreme non-planar case: the
ring, or annular, wing. In this case the estimates are compared with other theories, and seen to be
very good. The figure also includes the estimate of Cmq. As illustrated above, Cmq and Clp can
be computed using vlm methods, and this capability is included in the John Lamar’s vortex
lattice method, VLMpc.*
*
JKayVLM and VLMpc are available on the web at http://www.aoe.vt.edu/~mason/Mason_f/MRsoft.html,
together with links to a few other vlm codes.
2/6/2016
Classical Linear Theory Computational Aerodynamics 5-65
Figure 5.50. Predictions by Kalman, Rodden, and Giesinglxxii using vlm (symbols)
of the aerodynamic characteristics of a ring wing, compared with theory (solid
lines) and slender wing theory (dashed lines), both from Belotserkovskii. lxxiii
Ground Effects and Dihedral Effects Examples
Figure 5.51 provides an example of the effects of the presence of the ground on the
aerodynamics of simple unswept rectangular wings. The lift and pitching moment slopes are
presented for calculations made using JKayVLM and compared with the results published by
Kalman, Rodden and Giesing,lxxii and experimental data. An image is used below the ground
plane to represent grount effect, as described above. The agreement between the data and
calculations is excellent for the lift curve slope. The AR = 1 wing shows the smallest effects of
ground proximity because of the three-dimensional relief provided around the wing tips. As the
aspect ratio increases, the magnitude of the ground effects increases. The lift curve slope starts to
increase rapidly as the ground is approached.
The wings also experience a significant change in the pitching moment slope (aerodynamic
center shift),* and this is also shown. Note that the predictions start to differ as the ground is
approached. JKayVLM actually rotates the entire surface to obtain another solution to use in
*
This shift is the reason that ground effects machines cannot just “takeoff” and why WIG vehicles cannot fly out of
ground effect.
2/6/2016
5-66 Applied Computational Aerodynamics
estimating the lift curve slope. The standard procedure used by most methods is to simply change
the slope condition at the mean line, as discussed previously in this chapter. Because of the
proximity to the ground, this might be a case where the transfer of the boundary condition may
not be accurate.
8.0
7.0
c/4
6.0
CL
c
U•
h
5.0
4.0
AR
4
3.0
2
2.0
1.0
1
0.0
0.2
0.4
0.6
0.8
1.0
1.2
0.8
1.0
1.2
1.4
h/c
0.20
0.10
AR = 1
CM 0.00
-0.10
AR = 2
-0.20
-0.30
-0.40
0.0
AR = 4
0.2
0.4
0.6
h/c
1.4
Figure 5.51. Example of ground effects for a simple rectangular wing. Dashed lines
from Kalman, Rodden, and Giesing,lxxii, solid lines are predictions by
JKayVLM.lxv Symbols are experimental results by Sanders.lxxiv Pitching
moment reference taken about the quarter chord.
Figure 5.52 presents similar information for the effect of dihedral angle on a wing. In this
case the effects of anhedral, where the wing tip approach the ground, are extremely large. The
results of dihedral changes for a wing out of ground effect are shown for comparison. Both
methods agree well with each other, with differences appearing only as the wingtips approach
2/6/2016
Classical Linear Theory Computational Aerodynamics 5-67
the ground. Here again, JKayVLM actually rotates the entire geometry, apparently resulting in
an increase in the effects as the tips nearly contact the ground. It also prevents calculations from
being obtained as close to the ground as the published results. In making these calculations it was
discovered that the wing panel was rotated and not sheared, so that the projected span decreases
as the dihedral increases, and this produces much more pronounced changes in the lift curve
slope due to the reduction in projected span.
12
Solid lines: computed using JKayVLM
Dashed lines: from Kalman, Rodden, and Giesing
ARref = 4, Planform rotated by the dihedral angle,
10
h
8
CL
h/c = 0.5
6
h/c = 1
4
h/c = •
2
Note: Most of the decrease in lift curve slope for the wing out of ground
effect is due to the effect of reduced span as the wing rotates from
the zero dihedral condition
0
-40°
-30°
-20°
-10°
0°
10°
20°
30°
40°
Dihedral angle,
Figure 5.52. Example of ground effects for a wing with dihedral (a case from
Kalman, Rodden and Giesing, Ref. lxxii), including a comparison with
results from JKayVLM (Ref. lxv)
5.3.4 Inverse Design Methods and Program DesCam
Although most of the analysis discussed above corresponds to the analysis problem, the
design problem can also be treated. In this section we provide one example: the determination of
2/6/2016
5-68 Applied Computational Aerodynamics
the camber line shape required to obtain a specific chord load in the two dimensional case. We
take the opportunity to illustrate a method due to Lanlxiii that uses a mathematically based
selection of vortex and and control point placements instead of the 1/4 - 3/4 rule used above.
Recall that a line of vortex singularities induces a vertical velocity on the singularity line
given by (see Chapter 4 and Karamcheti.viii)
c
1 ( x)
w(x)
dx .
2 x x
(5.65)
0
In thin wing theory the vertical velocity, w, can be related to the camber line slope as shown in
Eq. 5.51. Vortex strength can be related to the streamwise velocity by ul V uu V , where
the induced velocities are anti-symmetric above and below the camber line. This in turn can be
used to relate the vorticity to the change in pressure, Cp through Eq. 5.56:
u u
u
u
C p C pl C pu 2 l 2 u 2 u l
V V
V V
(5.66)
which leads to:
C p (x)
2
(x)
(5.67)
resulting in the expression for camber line slope in terms of design chord load:
c
dz
1 C p
dx .
dx
4 x x
(5.68)
0
Here dz/dx includes the slope due to the angle of attack. Note that the integral contains a
singularity, and this singularity introduces the extra complications that require special analysis
for numerical integration. The original Lan theory (Ref. lxiii) was used to find C p (in a slightly
different form), but it can also be used to obtain dz/dx directly from C p . To do this, Lan
derived a summation formula to obtain the slope. Once the slope is known, it is integrated to
obtain the camber line.
Lan showed that the integral in Eq. (5.68) can be found very accurately from the summation:
dz
1 N C p
dx i
N k1 4
2/6/2016
xk (1 xk )
xi xk
(5.69)
Classical Linear Theory Computational Aerodynamics 5-69
where:
xk
1
2k 1
1 cos
2
2N
k 1,2,..., N
(5.70)
and:
xi
1
i
1 cos
2
N
i 0,1,2,..., N .
(5.71)
Here N + 1 is the number of stations on the camber line at which the slopes are obtained.
Given dz/dx, the camber line is then computed by integration using the trapezoidal rule
(marching forward starting at the trailing edge):
dz
x x dz
zi1 zi i1 i
.
2 dx i dx i1
(5.72)
The design angle of attack is then:
DES tan 1 z0
(5.73)
The camber line can then be redefined in standard nomenclature, i.e., z(x=0) = z(x=1) = 0.0:
zi zi (1 xi ) tan DES
(5.74)
How well does this work? Program DesCam implements the method described here, and the
user’s manual is provided in App. C. Here we compare the results from DesCam with the
analytic formula given in Appendix A for the NACA 6 Series mean line with a = 0.4. The results
are shown in Figure 5.53 below. The camber scale is greatly enlarged to demonstrate the
excellent comparison. Even though the chord load is constructed by two straight-line segments,
the resulting required camber line is highly curved over the forward portion of the airfoil. Note
that thin airfoil theory allows only two possible values for the pressure differential at the leading
edge, zero or infinity. A close examination of the camber line shape required to produce a finite
load reveals a singularity, since the slope is infinite. This feature is much easier to study using
the analytic solution, as given in Appendix A. This approach can easily be extended to three
dimensions. Notice that the design problem is direct, in that it does not require the solution of a
system of equations.
2/6/2016
5-70 Applied Computational Aerodynamics
(Z-Z0)/C
(z-z
)/c -- DesCam
DesCam
0
Z/C -- from
& vonDoenhoff
z/c
fromAbbott
thin airfoil
theory
0.12
Design Chord
Loading
0.10
0.08
z/c
2.00
1.50
CP
1.00
0.06
0.50
0.04
0.00
0.02
0.00
0.0
0.2
0.4
0.6
0.8
-0.50
1.0
x/c
Figure 5.53. Example and verification of camber design using DesCam.
5.3.5 Alternate and Advanced vlm Methods
Many variations of the vortex lattice method have been proposed over the years. They
address both the improvement in accuracy for the traditional case with a planar wake, and
extensions to include wake position and rollup as part of the solution. The traditional vortex
lattice approaches assume that the wing wake remains flat and aligned with the freestream. This
assumption is acceptable for most cases, although not technically correct. The effect of the wake
on the wing that generates it is small unless the wing is highly loaded. However, the interaction
between the wake from an upstream surface and a trailing lifting surface can be influenced by the
rollup and position.
In the basic case where the wake is assumed to be flat and at a specified location, the primary
extensions of the method have been directed toward improving the accuracy using a smaller
number of panels. Houghlxxv demonstrated that improvement in accuracy could be achieved by
using a lattice that was slightly smaller than the true planform area. Basically, he proposed a 1/4
panel width inset from the wing tips.
Perhaps the most important revision of the vortex lattice method was proposed by Lan lxiii,
and called the “quasi vortex lattice method.” In this method Lan used mathematical methods,
2/6/2016
Classical Linear Theory Computational Aerodynamics 5-71
rather than the more heuristic arguments described above, to find an approximation for the thin
airfoil integral in the streamwise direction. The result was, in effect, a method where the vortex
and control point locations were established from the theory of Chebychev polynomials to obtain
an accurate value of the integrals with a small number of panels. The mathematically based
approach also led to an ability to compute leading edge suction very accurately.
The wake rollup and position problem has been addressed by Mooklxiv among others, and his
work should be consulted for details. A method similar to Mook’s has been presented in the book
by Katz and Plotkin.v They propose a vortex ring method, which has advantages when vortices
are placed on the true surface of a highly cambered shapes.
5.3.6 Unsteady flow extension
Extensions to include unsteady flow have also been made. For the case of harmonically
oscillating surfaces and an assumed flat wake the extension was given by Albano and
Rodden.lxxvi In this case the vortex is augmented with an oscillating doublet, and the so-called
doublet-lattice method is obtained. The doublet-lattice method is widely used for subsonic flutter
calculations. Kalman, Giesing, and Roddenlxxii provide additional details and examples (they also
demonstrated the highly nonplanar capability of the vlm method as given above). A refinement
to this method and an investigation of panel density requirements was made by Rodden at
al.lxxvii,lxxviii
A general unsteady flow calculation method, including wake rollup and incorporation of
leading edge vortices has been developed by Mook and co-workers.lxiv Katz and Plotkinv also
describe vlm methods for unsteady motion in some detail, and biologically inspired interest in
flapping flight has also led to the development of general unsteady methods.lxxix The resulting
codes have the potential to be used to model time accurate aerodynamics of vehicles in arbitrary
maneuvering flight, including the high angle of attack cases of interest in fighter aerodynamics.
These methods are also currently being used in studies where the aircraft aerodynamics is
coupled with advanced control systems as well as structural dynamics. In this case active control
is incorporated and adverse aeroelastic behavior can suppressed.
5.3.7 Summary
The summary provided above illustrates the current state of affairs. Classical vortex lattice
methods, per se, are not currently being developed. However, unsteady methods continue to be
2/6/2016
5-72 Applied Computational Aerodynamics
developed. The steady flow methods are continuously used in a variety of applications for
conceptual design trade studies and in advanced simulation methods where several disciplines
are being studied simultaneously and an affordable model of the aerodynamics is required. They
are also widely used in conceptual design and the early stages of aircraft preliminary design.
5.4 Project
Use WinVorView to solve the aerodynamics of the T-38 aircraft at a variety of conditions.
WinVorView is a GUI program written to run Vorlaxlx on a PC; Vorlax is a vortex lattice
program. You should do the following prior to starting your project in order to become familiar
with the program and its use.
Drag the WinVorView folder onto the top level of your C: drive (i.e. C:\WinVorView;
DO NOT run from from your Desktop!)
The folder has a hermite file for the T-38 (a hermite file is a simplified geometry file).
Double click on the program and open the T-38 file (the view is not to scale, so resize the
window to make the T-38 look better).
Try the different views (View, Hermite, etc.).
The first thing to do is slice the geometry (Actions, Slice Geometry) . . . make sure you
have enough slices to adequately model the inlet, etc. The number of slices must be an
odd number—at least 51 slices should be used. Reslicing the control surfaces is OK.
Treat the geometry as “flat”.
Now run Vorlax (Actions, Run Vorlax, Create). You need to go through the wizard and
input the required geometric variables (be sure to tab through the input boxes, otherwise
you won’t be able to proceed to the next window). Specify “symmetric” geometry/flight
conditions and use cosine chordwise panel spacing. Once the input file is complete, run
the cases. Note: make sure you are saving the results in the same directory as your
hermite file and name the output files with the same name as the hermite file. The digital
output will be in “t-38.cof”.
The basic geometric parameters for the T-38 are:
Wing area, S:
Aspect ratio, AR:
Taper ratio, :
170 ft2
3.75
0.30
Other geometric dimensions for the T-38 can be found in Introduction to Aeronautics, Appendix
B.lxxx You will need this information to properly predict the aerodynamic coefficients. Set the X
and Z moment reference centers and the height above the ground to 0.0.
The first thing you should do is perform a “panel sensitivity study” on the configuration. Run
WinVorView at α = 10o and M = 0.4 with 100 vortex panels and find the resulting CL and CD.
Now rerun with 200 panels, 300 panels, etc., until you find the number of panels that give you
“converged” results. You may need to continue this up to 1500 or more panels! Graph your
results (CL and CD vs. # panels) and comment on the results as appropriate.
Now run the program for the following combination of conditions: M = 0.0, 0.4, 0.8 and α = 0o,
2o , 4o , 6o , 8o, 10o, 12o, 14o, 16o, 18o. Graph the results for CL and CD as a function of angle of
2/6/2016
Classical Linear Theory Computational Aerodynamics 5-73
attack, with one graph for each Mach number (you can plot both coefficients on one graph by
using two vertical scales if you want). Since the vortex lattice program only predicts drag due to
lift, you should add the experimental value of zero-lift drag coefficient to your results. For the CL
and CD results at M = 0.4, compare with the actual aircraft data. Also for M = 0.4 compare your
results with the theoretical values you obtain using the theoretical lift-curve slope for a wing:lxxxi
2 AR
CL
2 4 AR2 2 (1
tan 2
2
)
Where the 2 term in the numerator is the classical 2D thin airfoil theory lift curve slope per
radian, AR is the aspect ratio, b2/Sref, 1 M 2 , and is the sweep of the max thickness line.
You should correct the theoretical lift-curve slope and for compressibility using the PrandtlGlauert rule (Ref. i):
CL
Data for the T-38 are given below.
2/6/2016
CL ( M 0)
1 M 2
5-74 Applied Computational Aerodynamics
from Brandt, et al (Ref. lxxx)
2/6/2016
Classical Linear Theory Computational Aerodynamics 5-75
from Brandt,
from Brandt, et al (Ref. lxxx)
Comment on how well the vortex lattice program was able to predict the aerodynamics of the
vehicle. What did it do well? What didn’t it do well? What didn’t it do at all? How well did the
results of the program compare with both the aircraft data and the theoretical values? Comment
on the shortcomings relative to the assumptions for a potential flow method.
2/6/2016
5-76 Applied Computational Aerodynamics
5.5 Exercises
1. Program PANEL (or an equivalent 2D panel method).
a) Obtain a copy of program PANEL and the sample case.
b) Convert PANEL to run on your PC.
c) Run the sample case: NACA 4412, 20 pts. upper, 20 pts. lower, = 4° , and verify
against sample case.
d) Document
i) compile time required on your PC
(cite computer and compiler used)
ii) the execution time for the sample case
iii) the accuracy relative to the sample case.
iv) the exact modifications required to make the code
work on your computer
2. Start work on program PANEL
a) Save a reference copy of the working code!
b) Check convergence with panels (NLOWER+NUPPER must be less than 100
currently). How many panels do you need to get results independent of the number
of panels? What happens to the computer time as the number of panels increases?
c) Check the coordinates generated by the airfoil routine vs. exact (consider using the
NACA 0012, see App. A for geometry definition), including examination of the
coordinates at the trailing edge. This is best done by making a table of exact and
computed values at selected values of x/c. What did you find out?
d) Locate the source strengths, and sum the source strengths x panel lengths to get the
total source strength. Does it sum to zero? Should it?
e) Where is the moment reference center in this code?
Submit an assessment of your findings.
3. Modify program PANEL:
You need a version of PANEL that will allow you to compute the pressure
distribution on arbitrary airfoils. This exercise will give you this capability. Modify
the code to interpolate input airfoil points to the program defined surface points,
x/c. The resulting code should:
a) accept arbitrary airfoil input data
b) echo all the input data on the output
c) generate an output file for post processing
(both for plotting and as the input to a boundary layer code)
d) output Cm about the airfoil quarter chord point.
Hint: Don’t alter the panel distribution. The paneling scheme should be independent
of the input distribution of airfoil coordinates. This produces a much more general
and accurate program. This problem is usually solved by finding both the x/c and
y/c values as functions of the airfoil arc length, starting at the lower surface trailing
edge. A spline fit is usually used to interpolate the values along the arc length.
2/6/2016
Classical Linear Theory Computational Aerodynamics 5-77
Check your modified code. Run the airfoil you ran previously with internal
coordinate generation. This time use an input file with the same coordinates as
external inputs. Submit a description of your work, and assess your results.
4. Assess the accuracy of incompressible potential flow theory. Run your modified PANEL code
using the airfoil you selected in the exercise in Chap. 1. (What happens if your airfoil has a
trailing edge with finite thickness? What do you do now?)
- compare the computed pressure distribution with the experimental data
- compare the computed force and moment results with the data
(over a range of angles of attack
Turn in a CONCISE report describing the results of your work. Include a plot showing the
pressure distribution comparison, and a plot(s) showing comparison with forces and
moments. What do you conclude about the accuracy of this method?
5. Airfoil design using program PANEL
Take your reference airfoil:
a) add thickness on the bottom (mid chord)- what happens?
b) shave some thickness off the bottom (mid chord) - ?
c) add thickness on the top (mid chord)- what happens?
d) deflect the trailing edge down a couple of degrees
(how sensitive is the airfoil to changes at the TE?)
Hint: use smooth 's to the reference foil employing analytic formulas.
Turn in a CONCISE report comparing the effects on the pressure distribution due to the
above modifications.
6. How good is thin airfoil theory? Compare the thin airfoil Cp for a flat plate with program
PANEL.
Recall thin airfoil theory for an uncambered flat plate:
C p 4
1
x/c
.
x/c
a) pick an NACA 0012 airfoil at = 2° and 12° and run PANEL.
b) plot Cp/ as a function of x/c.
c) how many panels do you need to get a converged solution from PANEL?
d) what conclusions do you reach?
7. Obtain a copy of XFOIL and compare the results you obtained in Exercise 6.
8. Get a copy of VLMpc from the web site, or an equivalent 3D vlm method. Install the program
on your personal computer and repeat the sample case, checking that your output is the same
as the sample output files. Study the output to familiarize yourself with the variety of
information generated. Turn in a report describing your efforts (not the output), including any
mods required to make the code run on your computer.
2/6/2016
5-78 Applied Computational Aerodynamics
9. How good is thin airfoil theory? Compare the thin airfoil theory Cp for a 2D flat plate airfoil
with program VLMpc.
Flat plate thin airfoil theory:
CP 4
1 x/c
x/c
i. Pick an aspect ratio 10 unswept wing at = 3° and 12° and run VLMpc.
ii. Plot (Cp)/ as a function of x/c at the wing root.
iii. How many panels do you need to get a converged solution from VLM?
iv. What conclusions do you reach?
10. Compare the validity of an aerodynamic strip theory using VLMpc. Consider an
uncambered, untwisted wing, AR = 4, = .4, le = 50°, at a lift coefficient of 1. Plot the
spanload, and the Cp distribution at approximately the center section, the midspan station,
and the 85% semispan station. Compare your results with a spanload constructed assuming
that the wing flow is approximated as 2D at the angle of attack required to obtain the specified
lift. Also compare the chordloads, Cp, at the three span stations. How many panels do you
need to obtain converged results. Document your results. Do you consider this aerodynamic
strip theory valid based on this investigation? Comment.
11. Compare the wing aerodynamic center location relative to the quarter chord of the mac for
the wing in exercise 10, as well as similar wings. Consider one wing with zero sweep on the
quarter chord, and a forward swept wing with a leading edge sweep of -50°. Compare the
spanloads. Document and analyze these results. What did you learn from this comparison?
12. For the wings in exercise 11, compare the section lift coefficients. Where would each one
stall first? Which wing appears to able to reach the highest lift coefficient before the section
stalls.
13. For the problem in exercise 12, add twist to each wing to obtain near elliptic spanloads.
Compare the twist distributions required in each case.
14. Pick a NASA or NACA report describing wind tunnel results for a simple one or two lifting
surface configuration at subsonic speeds. Compare the lift curve slope and stability level
predicted by VLMpc with wind tunnel data. Submit a report describing your work and
assessing the results.
15. Add a canard to the aft and forward swept wings analyzed in exercise 11. Plot the sum of the
spanloads. How does the canard effect the wing spanload.
16. Consider the wings in exercise 15. How does lift change with canard deflection? Add an
equivalent tail. Compare the effect of tail or canard deflection on total lift and moment. Did
you learn anything? What?
17. Construct a design code using the 1/4 - 3/4 rule and compare with DESCAM.
18. Construct a little 2D code to study ground effects.
19. Compare wing and wing/tail(canard) results for CL with standard analytic formulas.
2/6/2016
Classical Linear Theory Computational Aerodynamics 5-79
5.6 References
i
Bertin, J.J., and Cummings, R.M., Aerodynamics for Engineers, 5th Edition, Prentice-Hall, Inc.,
Upper Saddle River, 2008.
ii
Erickson, L.L., “Panel Methods—An Introduction,” NASA TP-2995, Dec. 1990.
iii
Hess, J. L., “Panel Methods in Computational Fluid Dynamics,” Ann. Rev. of Fluid Mech.,
Vol. 22, 1990, pp. 255-274.
iv
Hess, J.L., “Linear Potential Schemes,” Applied Computational Aerodynamics, P.A. Henne,
ed., AIAA, Washington, 1990. pp.21-36.
v
Katz, J., and Plotkin, A., Low-Speed Aerodynamics, 2nd Edition, Cambridge University Press.
Cambridge, 2001.
vi
Moran, J. An Introduction to Theoretical and Computational Aerodynamics, John Wiley &
Sons, New York, 1984. pp. 103-112, 118-123, 260-287 republished by Dover, 2003.
vii
Cebeci, T., An Engineering Approach to the Calculation of Aerodynamic Flows, Horizon
Publishing, Long Beach, 1999.
viii
Karamcheti, K., Principles of Ideal-Fluid Aerodynamics, 2nd Rev. Ed., Krieger Publishing,
Melpourne, 1980.
ix
Hildebrand, F.B., Advanced Calculus for Applications, Prentice-Hall, Englewood Cliffs, 1962
x
Ashley, H, and Landahl, M., Aerodynamics of Wings and Bodies, Addison-Wesley, Reading,
1965 (republished in paperback by Dover Publishing).
xi
Curle, N., and Davis, H.J., Modern Fluid Dynamics, Volume 1: Incompressible Flow, Van
Nostrand, London, 1968.
xii
Neal, David, PhD Student, Virginia Tech, 2007, private communication
xiii
Houghton, E.L., and Carpenter, P.W., Aerodynamics for Engineering Students, 4th Ed.,
Halsted Press, New York, 1993, pp. 257-265, 203-211. (code removed from the 5th Ed.)
xiv
Kuethe, A.M., and Chow, C-Y., Foundations of Aerodynamics, 5th Ed., John Wiley, New
York, 1998, pp. 156-164.
xv
Wauquiez, Christian, http://www.nada.kth.se/~chris/pablo/pablo.html, Pablo theory described
as part of his Licentiate’s Thesis, “Shape Optimization of Low Speed Airfoils using MATLAB
and Automatic Differentiation,” KTH, Stockholm, 2000.
xvi
Drela, M., “XFOIL: An Analysis and Design System for Low Reynolds Number Airfoils,” in
Low Reynolds Number Aerodynamics, Mueller, T.J., ed., Lecture Notes in Engineering No. 54,
Springer Verlag, 1989. http://web.mit.edu/drela/Public/web/xfoil/
xvii
Abbott, I.H., and von Doenhoff, A.E., Theory of Wing Sections, Dover, New York, 1959.
xviii
Stack, J., Lindsey, W.F., and Littell, R.E., “The Compressibility Burble and the Effect of
Compressibility on Pressures and Forces Acting on an Airfoil,” NACA R-646, 1938.
xix
Jameson, A., “Acceleration of Transonic Potential Flow Calculations on Arbitrary Meshes by
the Multiple Grid Method,” AIAA Paper 79-1458, Proceedings of the AIAA 4th Computational
Fluid Dynamics Conference, AIAA, New York, 1979, pp. 122-146.
xx
Kroo, Ilan, “Aerodynamic Analyses for Design and Education,” AIAA Paper 92-2664, June
1992.
2/6/2016
5-80 Applied Computational Aerodynamics
xxi
Volpe, G., “Inverse Airfoil Design: A Classical Approach Updated for Transonic
Applications,” in Applied Computational Aerodynamics, ed. by P.A. Henne, AIAA Progress in
Astronautics and Aeronautics, Vol. 125, AIAA, New York, 1990, pp. 191-220.
xxii
Labrujere, Th. E., and Sloof, J.W., “Computational Methods for the Aerodynamic Design of
Aircraft Components,” Ann. Rev. of Fluid Mech., 1993, Vol. 25, pp.183-214.
xxiii
Bristow, D.R., “A New Surface Singularity Method for Multi-Element Airfoil Analysis and
Design,” AIAA Paper 76-20, Jan. 1976.
xxiv
Aidala, P.V., Davis, W.H., Jr., and Mason, W.H., “Smart Aerodynamic Optimization,” AIAA
Paper 83-1863, July 1983.
xxv
PAN AIR User’s Class Short Course Presentation Material, 1981.
xxvi
Hess, J. L. “The Problem of Three-Dimensional Lifting Potential Flow and Its Solution by
Means of Surface Singularity Distributions,” Computer Methods in Applied Mechanics and
Engineering, Vol. 4, 1974. pp. 283-319.
xxvii
Carmichael, R.L., and Erickson, L.L., "PAN AIR - A Higher Order Panel Method for
Predicting Subsonic or Supersonic Linear Potential Flows About Arbitrary Configurations,"
AIAA Paper No. 81-1255, June 1981.
xxviii
Nathman, James K., “Improvement of a Panel Method by Including Panel Warp,” AIAA
Paper 2004-721, Jan. 2004.
xxix
Tinoco, E.N., Ball, D.N., and Rice, F.A. II, “PAN AIR Analysis of a Transport High-Lift
Configuration,” Journal of Aircraft, Vol. 24, No. 3, 1987, pp. 181-188.
xxx
Magnus, A.E., and Epton, M.A., “PAN AIR - A Computer Program for Predicting Subsonic
or Supersonic Linear Potential Flows About Arbitrary Configurations Using a Higher Order
Panel Method,” Volume I - Theory Document (Version 1.0), NASA CR 3251, April 1980.
xxxi
Margason, R.J., Kjelgaard, S.O., Sellers, W.L., Moriis, C.E.K., Jr., Walkley, K.B., and
Shields, E.W., “Subsonic Panel Methods - A Comparison of Several Production Codes,” AIAA
Paper 85-0280, Jan. 1985.
xxxii
Ashby, D.L., Dudley, M.R., Iguchi, S.K., Browne, L., and Katz, J., “Potential Flow Theory
and Operation Guide for the Panel Code PMARC,” NASA TM 102851, Jan. 1991.
xxxiii
Nathman, J.K., “Subsonic Panel Methods – Second (Order) Thoughts,” AIAA Paper 985563. Sept. 1998.
xxxiv
Mason, W.H., and Rosen, B.S., “The COREL and W12SC3 Computer Programs for
Supersonic Wing Design and Analysis,” NASA CR-3676, Dec. 1983.
xxxv
Van Zyl, L.H., “Unsteady Panel Method for Complex Configurations Including Wake
Modeling,” Journal of Aircraft, Vol. 45, No. 1, Jan-Feb. 2008, pp. 276-285.
xxxvi
Public Domain Aeronautical Software, http://www.pdas.com
xxxvii
Hess, J.L., and Smith A.M.O., “Calculation of Nonlifting Potential Flow About Arbitrary
Three-Dimensional Bodies,” Douglas Report ES40622, Douglas Aircraft Company, 1962
xxxviii
Rubbert, P.E., “Theoretical Characteristics of Arbitrary Wings by a Nonplanar Vortex
Lattice Method,” Boeing Report D6-9244, The Boeing Company, 1964.
2/6/2016
Classical Linear Theory Computational Aerodynamics 5-81
xxxix
Woodward, F.A., Tinoco, E.N., and Larsen, J.W., “Analysis and Design of Supersonic
Wing-Body Combinations, Including Flow Propertis in the Near Field,” Part I – Theory and
Application, NASA CR-73106, 1967.
xl
Rubbert, P.E., and Saaris, G.R., “A General Three-Dimensional Potential Flow Method
Applied to V/STOL Aerodynamics,” SAE Paper No. 680304, 1968.
xli
Hess, J.L., “Calculation of Potential Flow About Arbitrary 3-D Lifting Bodies,” Douglas
Report MDC-J5679-01, Oct. 1972.
xlii
Wooward, F.A., “An Improved Method for the Aerodynamic Analysis of Wing-Body-Tail
Configurations in Subsonic and Supersonic Flow,” NASA CR-2228, Parts I and II, 1973.
xliii
Roberts, A., and Rundle, K., “Computation of First Order Compressible Flow About WingBody Configurations,” AERO MA No. 20, British Aircraft Corporaion, Feb. 1973
xliv
Mercer, J.E., Weber, J.A., and Lesfor, E.P., “Aerodynamic Influence Coeficient Method
Using Singularity Splines,” NASA CR-2423, May 1974.
xlv
Morino, L., and Kuo, C-C, “Subsonic Potential Aerodynamics for Complex Configurations: A
General Theory,” AIAA J., Vol. 12, No. 2, pp 191-197, Feb. 1974.
xlvi
Johnson, F.T., and Rubbert, P.E., “Advanced Panel-Type Influence Coefficient Methods
Applied to Subsonic Flow,” AIAA Paper no. 75-50, Jan. 1975.
xlvii
Ehlers, F.E., and Rubbert, P.E., “A MAch Line Panel Method for Computingthe Linearized
Supersonic Flow,” NASA CR-152126, 1979.
xlviii
Ehlers, F.E., Epton, M.A., Johnson, F.T., Magnus, A.E., and Rubbert, P.E., “A Higher Order
Panel Method for Linearized Flow,” NASA CR-3062, 1979.
xlix
Bristow, D.R., “Development of Panel Methods for Subsonic Analysis and Design,” NASA
CR 3234, 1980.
l
Hess, J.L., and Friedman, D.M., “An Improved Higher Order Panel Method for ThreeDimensional Lifting flow,” Douglas Aircraft Co. Report No. NADC-79277-60, 1981.
li
Maskew, B., “Prediction of Subsonic Aerodynamic Characteristics: A Case for Lower Order
Panel Methods,” Journal of Aircraft, Vol. 19, no. 2, 1982 pp. 157-163..
lii
Coopersmith, R.M., Youngren, H.H., and Bouchard, E.E., “Quadrilateral Element Panel
Method (QUADPAN),” Lockheed-California Rpt. LR 29671, 1981.
liii
Vortex Lattice Utilization, NASA SP-405, May 1976
liv
Margason, R.J., and Lamar, J.E., “Vortex-Lattice FORTRAN Program for Estimating
Subsonic Aerodynamic Characteristics of Complex Planforms,” NASA TN D-6142, Feb. 1971
lv
Lamar, J.E., and Gloss, B.B., “Subsonic Aerodynamic Characteristics of Interacting Lifting
Surfaces With Separated Flow Around Sharp Edges Predicted by a Vortex-Lattice Method,”
NASA TN D-7921, 1975
lvi
Lamar, J.E., and Herbert, H.E., “Production Version of the Extended NASA-Langley Vortex
Lattice FORTRAN Computer Program,” Vol. I, User’s Guide, NASA TM 83303, 1982
(requires update packet, July, 1984)
lvii
Herbert, H.E, and Lamar, J.E., “Production Version of the Extended NASA-Langley Vortex
Lattice FORTRAN Computer Program,” Vol. II, Source Code, NASA TM 83304, 1982
2/6/2016
5-82 Applied Computational Aerodynamics
lviii
Drela, M., and Youngren, H., AVL, An extended Vortex Lattice Method,
http://web.mit.edu/drela/Public/web/avl.
lix
Melin, T., Tornado, http://www.redhammer.se/tornado/
lx
Miranda, L.R., Eliott, R.D., and Baker, W.M., “A Generalized Vortex Lattice Method for
Subsonic and Supersonic Flow Applications,” NASA CR-2865, Dec. 1977.
lxi
Albright, A.E., Dixon, C.J., and Hegedus, M.C., “Modification and Validation of Conceptual
Design Aerodynamic Prediction Method HASC95 With VTXCHN,” NASA CR 4712, March
1996.
lxii
Nathman, J.K., and McComas, A., “Comparison of Stability and Control Calculations from
Vortex Lattice and Panel Methods,” AIAA Paper 2008-314, Jan., 2008.
lxiii
Lan, C.E., “A Quasi-Vortex-Lattice Method in Thin Wing Theory”, Journal of Aircraft, Vol.
11, No. 9, September 1974, pp. 518-527.
lxiv
Mook, D.T., and Nayfeh, A.H., “Application of the Vortex-Lattice Method to High-Angle-ofAttack Subsonic Aerodynamics,” SAE Paper No. 851817, October, 1985.
lxv
Jacob Kay, W.H. Mason, W. Durham, F. Lutze and A. Benoliel, “Control Power Issues in
Conceptual Design: Critical Conditions, Estimation Methodology, Spreadsheet Assessment,
Trim and Bibliography,” VPI-Aero-200, November 1993. (software and report available,
http://www.aoe.vt.edu/~mason/Mason_f/MRsoft.html )
lxvi
Tinling, B.E., and Kolk, W.R., “The Effects of Mach Number and Reynolds Number on the
Aerodynamic Characteristics of Several 12-Percent-Thick Wings Having 35° of Sweepback
and Various Amounts of Camber,” NACA RM A50K27, Feb. 1951.
lxvii
Stivers, Louis S., Jr., “Effectiveness of an All-Movable Horizontal Tail on an Unswept-Wing
and Body Combination for Mach Numbers from 0.60 to 1.40,” NASA TN D-13, Aug. 1959.
lxviii
Abbott, Ira H., and Greenberg, Harry, “Test in the Variable-Density Wind Tunnel of the
NACA 23012 Airfoil with Plain and Split Flaps,” NACA R No. 661, 1938.
lxix
Etkin, B., Dynamics of Flight—Stability and Control, 2nd Ed., John Wiley & Sons, New York,
1982.
lxx
Pittman, J.L., and Dillon, J.L., “Vortex Lattice Prediction of Subsonic Aerodynamics of
Hypersonic Vehicle Concepts,” Journal of Aircraft, Vol. 14, No. 10, 1977, pg 1017-1018.
lxxi
Polhamus, E.C., “Prediction of Vortex Lift Characteristics by a Leading-edge Suction
Analogy,” Journal of Aircraft, Vol. 8, No. 4, 1971, pp. 193-199.
lxxii
Kalman, T.P., Rodden, W.P., and Giesing, J., “Application of the Doublet-Lattice Method to
Nonplanar Configurations in Subsonic Flow,” Journal of Aircraft, Vol. 8, No. 6, 1971, pp.
406-415.
lxxiii
Belotserkovskii, S.M., The Theory of Thin Wings in Subsonic Flow, Plenum Press, New York, 1967.
lxxiv
Saunders, G.H., “Aerodynamic Characteristics of Wings in Ground Proximity,” Canadian
Aeronautics and Space Journal, June 1965, pp. 185-192.
lxxv
Hough, Gary R., “Remarks on Vortex-Lattice Methods,” Journal of Aircraft, Vol. 10, No. 5,
1973, pp. 314-317.
2/6/2016
Classical Linear Theory Computational Aerodynamics 5-83
lxxvi
Albano, E., and Rodden, W.P., “A Doublet-Lattice Method for Calculating Lift Distributions
on Oscillating Surfaces in Subsonic Flows,” AIAA J., Vol. 7, No. 2, February 1969, pp. 279285; errata AIAA J., Vol. 7, No. 11, 1969, p. 2192.
lxxvii
Rodden, W.P., Taylor, P.F. and McIntosh, S.C. Jr., “Further Refinement of te Subsonic
oublet-Lattice Method,” Journal of Aircraft, Vol. 35, No. 5, Sept-Oct 1998, pp. 720-727.
lxxviii
Rodden, W.P., Taylor, P.F., McIntosh, S.C., Jr. and Baker, M.L., “Further Convergence
Studies of the Enhanced Doublet-Lattice Method,” Journal of Aircraft, Vol. 36, No. 4, JulyAug 1999, pp. 682-688.
lxxix
Fritz, T.E., and Long, L.N., “Object-Oriented Unsteady Vortex Lattice Method for Flapping
Flight,” Journal of Aircraft, Vol. 41, No. 6, Nov-Dev 2004, pp. 1275 –1289.
lxxx
Brandt, S.A., Stiles, R.J., Bertin, J.J., and Whitford, R., Introduction to Aeronautics: A
Design Perspective, Reston, VA: AIAA, 1997.
lxxxi
Nicolai, L.M., Fundamentals of Aircraft Design, METS, Inc., San Jose, 1975
2/6/2016