Solutions to Review Questions
advertisement

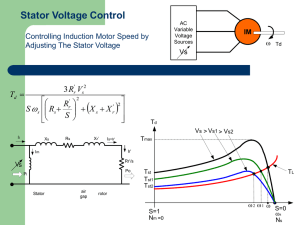
1 Electric Motors and Drives - Third Edition Solutions to Review Questions - Chapter 8 1) The key here is that when the supply frequency is reduced from 50 Hz, the voltage is also reduced so that the magnitude of the air-gap flux density wave remains constant at its rated value. Under these conditions full torque is developed when the slip speed of the rotor (i.e. its speed relative to the synchronous travelling field) is the same as under rated conditions. At 50 Hz, the rated synchronous speed is 3000 rev/min and the rated speed is 2960 rev/min, so the full-torque slip speed is 40 rev/min. At 30 Hz the synchronous speed is 1800 rev/min. The slip speed for rated torque is 40 rev/min so the rotor speed is 1760 rev/min. Similarly when the frequency is 3 Hz the synchronous speed is 180 rev/min, so with a slip speed of 40 rev/min the rotor speed is 140 rev/min. 2) Because conditions on the rotor are the same as at 50 Hz, the rotor current is the same, i.e. 150 A. The rotor frequency is given by sf, where s is the slip and f is the supply frequency. The slip slip speed . Hence the slips at 50 Hz, 30 Hz and 3 Hz are is given by:- slip = synchronous speed 0.01333, 0.02222 and 0.22222 respectively, yielding rotor frequencies of 0.666 Hz in each case. Since the rotor current at rated torque is independent of the supply frequency, it follows that the corresponding referred (stator) current is also the same. In addition, the magnetising current will be the same because the flux is the same, so the total stator current will also be the same in all three cases, i.e. 60 A. We note that the question says estimate, and this is just as well because we have chosen to ignore the iron losses, which will not be independent of the supply frequency, and which will have an in-phase component of current associated with the loss. Because we are not told anything about how the loss varies with frequency, and because the loss component of the input current will be much smaller than the load component , we can legitimately ignore it in arriving at an estimate. 3) To a first approximation, the magnitude of the flux-density wave in an induction motor is directly proportional to the stator voltage and inversely proportional to the frequency. When the frequency is reduced to lower the running speed, it is generally desirable to maintain the flux at its full value in order to exploit the magnetic circuit to the full, and maximise the torque per ampere of rotor current. So in order to keep the flux constant, the voltage must be reduced in proportion to the frequency, i.e. the ratio V/f is kept constant. The approximation that flux is proportional to V/f is valid provided that the volt-drop due to the stator resistance is negligible in comparison with the applied stator voltage. This is true at high frequencies, where the stator voltage is high. But at low frequencies (e.g. a few Hz with a 50 Hz or 60 Hz motor), it turns out that the stator resistance drop is comparable with the applied 2 voltage, and therefore merely keeping the ratio V/f constant causes the flux density to be below its full value. In order to bring the flux up to rated value, extra voltage (i.e. greater than that given by the ratio V/f) is called for, and this is referred to as ‘low-speed voltage boost’. 4) Except at very low frequencies, the magnitude of the flux density wave in an induction motor is directly proportional to the applied voltage and inversely proportional to the frequency. When the frequency is doubled, but the voltage remains the same, the magnitude of the flux density wave will be halved. We are told that the load torque is constant, and that with the original flux, the slip speed at which the motor torque equals the load torque is 0.05NS. The new flux is only half, so given that the induced current in the rotor is proportional to the flux and to the slip speed, we would have to double the original slip speed in order to induce the same current. However, we need twice as much current to develop the same torque because the flux is only half, so in fact the new slip speed will have to be four times the original slip speed, i.e 0.2NS. The new synchronous speed is 2NS, so the new slip is 0.2NS/2NS = 0.1 or 10%. 5) We will have to be prepared to make some ‘guesstimates’ to hazard an answer to this one, and not expect to place much confidence in the answers, although the main message (that at full torque, efficiency reduces with speed) should be clear enough. If we denote the output power at base speed as 1 p.u., we know that the input must be 1/0.8 = 1.25 p.u. so the losses at base speed are 0.25 p.u. But we have no data as to the breakdown of losses, so we will have to make some guesses. We will begin by considering operation at full torque but half speed, and make the sensible assumption that in line with normal practice the voltage is reduced with the frequency when the speed is lowered, in order to maintain constant air-gap flux. The load torque is constant at all speeds, so, because the flux is constant, the induced rotor current will be the same and so will the referred or load component of the stator current. The magnetising component of the stator current will also be the same, so the total stator current will be the same at all three speeds. Conditions in the motor will therefore be essentially the same as at base speed and full torque, the only real difference being that the synchronous speed of the field is halved. Hence all the copper losses will be the same as at base speed, and the rotor iron losses will be the same because the slip frequency in the rotor is unchanged. The stator iron losses will be less because the supply frequency has halved, and the windage and friction losses will have reduced because the speed has halved. If we invoke the rule-of-thumb that says that in a well-designed motor at full load the loaddependent losses (i.e. the copper losses) are equal to the other losses (iron loss, windage and friction and stray loss), we might expect the copper loss at full torque to be 0.125 p.u.. Then if we take the iron loss to be proportional to the square of the frequency, and the windage to be proportional to the square of the speed, the other losses will become 0.125/4 = 0.031 p.u. at half speed. The total loss is then 0.125 + 0.031 = 0.156 p.u. The output power is 0.5 p.u. and the efficiency is therefore 0.5/0.656 = 0.76 or 76%. 3 At 10% of base speed and full torque the power output will only be 0.1 p.u. The total copper loss remains 0.125 p.u. and the other losses will be very small and so we can neglect them and estimate the efficiency as 0.1/0.225 = 0.44 or 44%. Although we cannot place too much trust in these estimates, this example nevertheless underlines the rapid fall-off in efficiency at low speeds when driving a constant-torque load. 6) A standard totally-enclosed induction motor is designed so that at full load and base speed the shaft-driven fan provides sufficient cooling to prevent an excessive temperature rise. At low speeds, the fan is much less effective and therefore if the motor torque is high (and the stator and rotor copper losses are at their full values) there is a danger that the permissible temperature rise of the winding insulation will be exceeded. 7) The potential problem stems from the fact that the inverter control circuit will includes a current feedback loop which in effect acts as a slip indicator. With more than one motor supplied from the inverter, there is no way the inverter can know from the current feedback what is happening to individual motors (unless the motors are identical and the loads on all of them vary in precisely the same way, which can never be guaranteed). For example, if one of the motors stalled because its load had seized, its apparent impedance might be much lower than the combined impedance of the other motors, in which case the inverter should deduce that there was a stall condition and refuse to raise the frequency to start the motors, thereby alerting the operator to the problem. But if there were a lot of motors, the stalled impedance of one might go unnoticed, and it could be left to burn out. Similarly, if one of the motors was subjected to an overload at normal running speed, it could end up drawing well above its rated current because the total current was still below what the inverter was programmed to allow. 8) Taking the last part first, a high supply impedance means that when current is drawn from the supply, the consequent drop in voltage at the supply terminals is not negligible, and may prove unacceptable to other consumers sharing the same supply, or exceed the statutory limits imposed by the supply authority. Starting an induction motor by direct connection to the mains supply results in a heavy current being drawn because the impedance of the motor is very low when the slip is 1, but unfortunately, the corresponding torque may be modest, particularly if the motor has a low-resistance rotor, so the motor may take a long time to accelerate up to speed, or may even not develop enough torque to start the load. A typical high-efficiency (low resistance) motor may draw perhaps 4 times full-load current yet produce a starting torque less than its full-load torque. The starting torque is low despite the high current in the rotor because the rotor current wave is out of phase (in space) with the air-gap flux wave. This happens because, when the rotor is stationary, the rotor frequency is equal to the mains frequency, and therefore the rotor inductive leakage reactance is large, which makes the rotor current wave lag the voltage wave by almost 90. (In contrast, under normal operating conditions, i.e. at low slip frequency, the leakage reactance is negligible and the rotor current wave is in phase with the flux/voltage wave.) 4 In complete contrast, when the same low-resistance motor is started from an inverter, the initial stator frequency will be much less than mains frequency, so that conditions on the rotor are ideal in terms of optimum torque production. The flux, stator and rotor currents will all be at their rated values, so full-load torque will be produced. Depending on the arrangement of the inverter, the current drawn from the supply by the inverter will be the full-load current, so there will be no overloading of the supply but the torque will probably be greater than for a direct-on-line start. 9) When an induction motor is supplied with a non-sinusoidal periodic waveform (such as that from an inverter) we know that the behaviour of the motor is governed primarily by the fundamentalfrequency component of the applied voltage. Under normal operating conditions the motor runs with a small slip with respect to the fundamental rotating field and presents a predominantly resistive impedance at the fundamental supply frequency. As far as the higher-frequency harmonics in the applied voltage waveform are concerned, however, the slip is very high and the effective motor impedance becomes dominated by the reactances arising from the leakage and magnetising inductances: these reactances are proportional to frequency, and therefore the amplitude of the harmonic current is inversely proportional to the harmonic order. A voltage waveform with a high harmonic content thus gives rise to a current waveform with a much lower harmonic content. In more straightforward language, the inductive nature of the motor at higher frequencies causes the current waveform to be much smoother than the voltage waveform, as shown for example in Figure 8.2. 10) Closed-loop control is discussed in section 8.3.2,where the distinction is made between situations in which the actual speed is much less that the target speed, and when the actual speed is close to the target speed. In the former case the output of the speed controller (which is in effect a torque demand) is saturated at its maximum value, so that the supply frequency is controlled by the slip controller to keep the torque at its full (rated) value during acceleration. On the other hand, when the speed approaches close to the target value, the speed controller comes out of saturation and the torque demand tapers off to provide a smooth approach to the target speed. The question first asks about a 10-second run-up to 150% speed, which for simplicity we will assume is to take place in a linear fashion. The motor is unloaded, and unless it has an untypically large inertia it will not require much torque to accelerate at such a modest rate. The speed controller will not saturate and the actual and target speeds will be very close at all times. After the initial voltage boost at low speed the voltage/frequency ratio will be kept constant up to base speed (100%), so the flux will be at full value and the slip required to give the (small) accelerating torque will be small and constant. Above base speed the voltage will remain at its maximum value, so the flux will reduce with frequency and the slip speed required to provide the accelerating torque will therefore increase with speed. Sketches of voltage, frequency and slip speed are shown in Figure 8A. Figure 8A here The second situation corresponds to a step increase in the target speed from 0 to 150%. The action of the speed controller will therefore be to achieve the target speed as quickly as possible, which with an unloaded medium-sized motor might be expected to take under one second. The timescale is therefore much shorter than the leisurely run-up previously discussed. 5 A step increase in the speed reference will immediately cause the speed controller to saturate and demand full torque from the slip controller, in order to accelerate the motor as fast as possible. The initial frequency will therefore be such that the slip speed is that corresponding to maximum allowable torque, the voltage being somewhat above the value corresponding to the rated voltage/frequency ratio in order to provide the boost required to ensure full flux at low frequency. As the motor accelerates rapidly under full torque, the slip speed will remain at its maximum value, and the v/f ratio will be held constant as the frequency ramps up, until base speed is reached. (If we assume that the whole run-up takes about one second, the slip speed during this period will be ten times greater than the slip speed shown in Figure 8A, which relates to the situation discussed previously where the run-up time was ten seconds.) Beyond base speed the voltage cannot increase and will therefore remain constant, so as the frequency increases the flux reduces and the torque per ampere also falls. Depending on the precise control structure, the motor may enter a current-limit regime where the rate of increase of frequency is limited so that the current is held constant, the acceleration then reducing progressively. When the actual speed gets close to the target the speed controller comes out of saturation and the torque demand tapers off as the final speed is approached. Sketches of voltage, frequency and slip speed are shown in Figure 8B. Note that the timescale of Fig 8B covers one second, whereas that of Fig 8A covers ten seconds. Fig 8 B here - End of Solutions for Chapter 8 -